Изобретение относится к области нетрадиционной энергетики и может быть использовано как источник электрической и механической энергии в гидро- и ветроустановках.
Наиболее распространенные на сегодня энергоустановки (ЭУ) с горизонтальной осью вращения ветродвигатели, по оценкам экспертов, пока не могут превысить мощность 5-7 МВт, что, в свою очередь, ограничивает возможности снижения стоимости кВт-часа до конкурентоспособной величины. К примеру, самая мощная на сегодня введенная в эксплуатацию ветроустановка такого типа мощностью в 5 МВт создана в Германии. Длина лопасти ее ветроротора составляет 61 м, высота башни 120 м.
В то же время мощность ЭУ с вертикальной осью вращения (ВОВ) ветроротора (типа ротора Дарье) может достигать 10-30 МВт. Можно перечислить такие преимущества этих ветроустановок, как: независимость функционирования от направления действия ветрового потока, возможность перехода от консольного крепления оси ветроротора к двухопорному, возможность размещения потребителя энергии, например электрогенератора или насоса в основании ветроустановки - при этом снижаются требования к высоте, прочности и жесткости опоры, упрощение конструкции лопастей и снижение их материалоемкости, а значит, и стоимости, уменьшение шумности ВЭУ с ВОВ.
Одним из главных недостатков ветророторов с ВОВ с жестко фиксированными относительно траверс лопастями являются высокая скорость ветрового потока (ВП), при которой происходит самозапуск ротора во вращение и более низкий коэффициент использования энергии потока, чем у традиционных пропеллерных ВЭУ. В результате проектировщики вынуждены снабжать такие ветроустановки дополнительными устройствами, например электродвигателем, ротором Савониуса и др., для раскрутки ротора и выведения его на рабочий режим.
Высокая скорость самозапуска такого ветроротора вызвана тем, что фиксированные жестко относительно горизонтальных траверс вертикальные лопасти ротора в статическом состоянии не могут создать (при обтекании их ветровым потоком средней и малой скорости) необходимой величины и нужного направления действия аэродинамических сил на лопастях и тем самым достаточного крутящего момента на валу для приведения ротора во вращение. Применение в конструкции ветроротора механизма управления положением лопастей позволяет повернуть лопасти относительно траверс так, что величина и направление действия результирующей аэродинамической силы на лопастях позволяют осуществить самозапуск ветроротора даже при скоростях ВП 3-4 м/сек.
Известен карусельный ветродвигатель (см. патент RU 2042044 С1, МПК F03D 3/00 F03D 3/06, от 20.08.1995 г.), рассматриваемый в качестве аналога. Карусельный ветродвигатель содержит установленный на вертикальной оси ротор с лопастями, размещенными на радиальных штангах, и механизм изменения углов атаки лопастей путем поворота лопастей вокруг собственных осей, параллельных оси вращения ротора, выполненный в виде связанного с каждой лопастью устройства изменения угла атаки, соединенного с другими аналогичными устройствами радиальными штангами посредством согласующего узла, смонтированного на оси вращения ротора, причем каждая лопасть имеет аэродинамический симметричный профиль, ось вращения лопасти смещена к передней кромке, а устройство изменения угла атаки содержит смонтированный на каждой радиальной штанге корпус, в котором установлен пространственный кривошипно-шатунный механизм качающейся шайбы, связанный с осью лопасти посредством конической шестерни ориентации, сидящей на оси кривошипа, на которой установлен подшипник кронштейна, качающейся шайбой является втулка с двумя радиальными цапфами, установленная с возможностью поворота на наклонной оси, расположенной под углом α=45 к оси лопасти, а на цапфах шарнирно укреплены два вильчатых поводка, ось одного из которых установлена с возможностью вращения в подшипнике, размещенном на основании корпуса под углом β к линии оси лопасти, а ось второго вильчатого поводка установлена с возможностью поворота в подшипнике кронштейна, причем угол β не превышает угол α, а согласующий узел выполнен в виде конического дифференциала.
Это известное устройство снабжено сложными дорогостоящими механическими узлами, надежность которых сомнительна, а эксплуатация требует серьезного обслуживания и неприемлема для широкого использования. Кроме того, оптимальный угол атаки крыла зависит от результирующего вектора воздушного потока (РВВП), величина которого зависит от скорости нагрузки, скорости воздушного потока и конкретной точки на траектории движения. А в аналоге эти факторы не учитываются при выборе угла атаки.
Интересная работа по усовершенствованию ротора Дарье проведена в Институте гидромеханики НАН Украины (Каян В.П., Лебедь А.Г. «Оптимизация рабочих характеристик полномасштабного макета ветроротора Дарье с прямыми управляемыми лопастями». -  , -Прикладна гiдромеханiка. - 2010, Том 12, №4, с. 26-35), которая частично отражена в патенте Вiтросилова установка (см. Патент Украины №16097А на полезную модель, МПК F03D 3/00, F03D, 07.06.2006, №7. с. 174.), принятый за аналог.
, -Прикладна гiдромеханiка. - 2010, Том 12, №4, с. 26-35), которая частично отражена в патенте Вiтросилова установка (см. Патент Украины №16097А на полезную модель, МПК F03D 3/00, F03D, 07.06.2006, №7. с. 174.), принятый за аналог.
Ветросиловая установка содержит ротор с вертикальным валом, с которым с помощью траверс и цапф связаны вертикальные лопасти, которые имеют вертикальные оси с шарнирными кольцами, с помощью которых они закреплены на траверсах с возможностью поворота около этих осей, и установленными на нижних концах лопастей дополнительными осями с вилками и роликами, которые стыкуются с кольцеобразной направляющей в форме жесткого обода, имеющего в плоскости форму окружности, а также аппаратуру управления силовой установкой, причем кольцеобразная направляющая соединена с механизмом управления положением лопастей ротора таким образом, что имеет возможность линейного перемещения вдоль направления ветрового потока, а механизм, размещенный на поворотной платформе, жестко связан с флюгером. Механизм управления положением лопастей ротора содержит электродвигатель, редукторы и подвижные направляющие, размещенные на платформе механизма, и червячные передачи, связанные с кольцеобразной направляющей, которая также имеет ролики для перемещения вдоль направляющих. Аппаратура управления ветросиловой установкой содержит программное устройство, которое определяет оптимальную величину смещения центра кольцеобразной направляющей в зависимости от параметров работы ротора ветросиловой установки.
Эффективность этой ветросиловой установки существенно выше, чем у ветроротора Дарье в классическом исполнении. Это один из вариантов более или менее удачного экспериментального поиска предельных показателей ветроротора. Вычисляется значение эксцентриситета между двумя осями каждого крыла, которое обеспечивает максимальное значение мощности ветроротора при выбранном способе управления. К тому же реализация электромеханической программируемой системы управления достаточно сложна.
Известен способ преобразования кинетической энергии текучей среды во вращательное движение крыла и установка для осуществления этого способа по патенту RU 2157919, МПК F03D 3/00 опубл. 20.10.2000 г.
Изобретение относится к области нетрадиционной энергетики, используется как источник электрической и механической энергии в гидро- и ветроустановках и выбрано в качестве прототипа.
Этот способ заключается в том, что в текучей среде устанавливают неподвижную ось перпендикулярно направлению движения потока этой текучей среды и на некотором расстоянии от этой оси помещают крыло, собственная продольная ось (О-О) которого параллельна неподвижной оси, вокруг которой это крыло под действием гидродинамических сил, действующих на него, совершает вращательное движение по круговой орбите и колебательное движение вокруг собственной продольной оси (О-О), причем при движении крыла по дуге круговой орбиты, обращенной к потоку текучей среды, величину угла α атаки крыла выдерживают постоянной с одним знаком, а при движении крыла по противоположной дуге круговой орбиты знак постоянной величины угла α атаки крыла изменяют также на противоположный, причем на дуге круговой орбиты, на которой крыло движется против направления движения потока текучей среды, и на дуге круговой орбиты, на которой крыло движется по направлению движения этого потока, значение угла α атаки устанавливают равным нулю.
В ряде случаев выгоднее при движении крыла (2) по круговой орбите (3) величину его угла α атаки устанавливать выше "критической" величины стационарного режима обтекания для выбранного профиля и формы крыла (2).
Для повышения эффективности способа величину окружной скорости Vt крыла (2) выбирают больше величины скорости Vo потока (А) текучей среды.
Установка для преобразования кинетической энергии текучей среды во вращательное движение крыла (2), содержащая неподвижную ось (1), установленную в потоке (А) текучей среды перпендикулярно направлению его движения, крыло (2), продольная ось (О-О) которого параллельна неподвижной оси (1), шарнирно связанное с неподвижной осью (1) с помощью по меньшей мере одного стержня (4), причем крыло (2) снабжено устройством управления его углом атаки, выполненным в виде крыловидного элемента (5), снабженного собственным приводом (6) для управления его угловым положением относительно крыла (2), отличающаяся тем, что привод (6) управления угловым положением крыловидного элемента (5) относительно крыла (2) обеспечивает угол α атаки крыла (2) при его движении по дуге круговой орбиты (3), обращенной к потоку (А) текучей среды, постоянным с одним знаком, по противоположной дуге - с обратным знаком, а при переходе крыла (2) с одной дуги на другую - равным нулю. Привод (6) для управления угловым положением крыловидного элемента (5) относительно крыла (2) обеспечивает диапазон углов α атаки крыла (2) выше "критических" величин стационарного режима обтекания для выбранного профиля и формы крыла (2), причем крыло (2) и/или крыловидный элемент (5) снабжены закрылком (7), связанным с приводом (6).
Привод (6) для управления угловым положением крыловидного элемента (5) относительно крыла (2) содержит кулачковый механизм, кулачок (9) которого закреплен на неподвижной оси (1), а коромысло (11) установлено на стержне (4) и связано с рычагом, имеющим два плеча (13 и 14), ось которого совпадает с центром (О-О) шарнирного соединения стержня (4) с крылом (2), и на этой же оси (О-О) установлен кулисный механизм, имеющий кулису (15) и два ползуна (16 и 17), причем один ползун (16) связан с плечом (14) двуплечего рычага и с рычагом (20), который установлен на той же оси (О-О) и связан с крыловидным элементом (5), а второй ползун (17) связан со стержнем (4) и с крылом (2).
Отметим недостатки рассмотренного способа: 1. Несмотря на то, что способ предложен и для ветроустановок, не предусмотрена операция и устройство для ориентировки относительно воздушного потока (ВП) кулисного механизма, задающего угол атаки, в то время как направление текущей среды однозначно задано.
2. Оптимальный угол атаки α зависит от результирующего вектора потока, т.е. от скорости внешнего потока и оборотов установки. Поэтому расчетная функция и конфигурация задающей кулисы рассчитана на некоторое оптимальное значение угла атаки α для некоторого, например, номинального значения результирующего вектора текущей среды при заданных соотношениях скорости потока и оборотов установки. Очевидно, что рассмотренный способ не обеспечивает оптимизацию величины угла атаки α в общем случае при разном направлении ВП, разной его скорости и различному соотношению между скоростью ВП и окружной скоростью устройства.
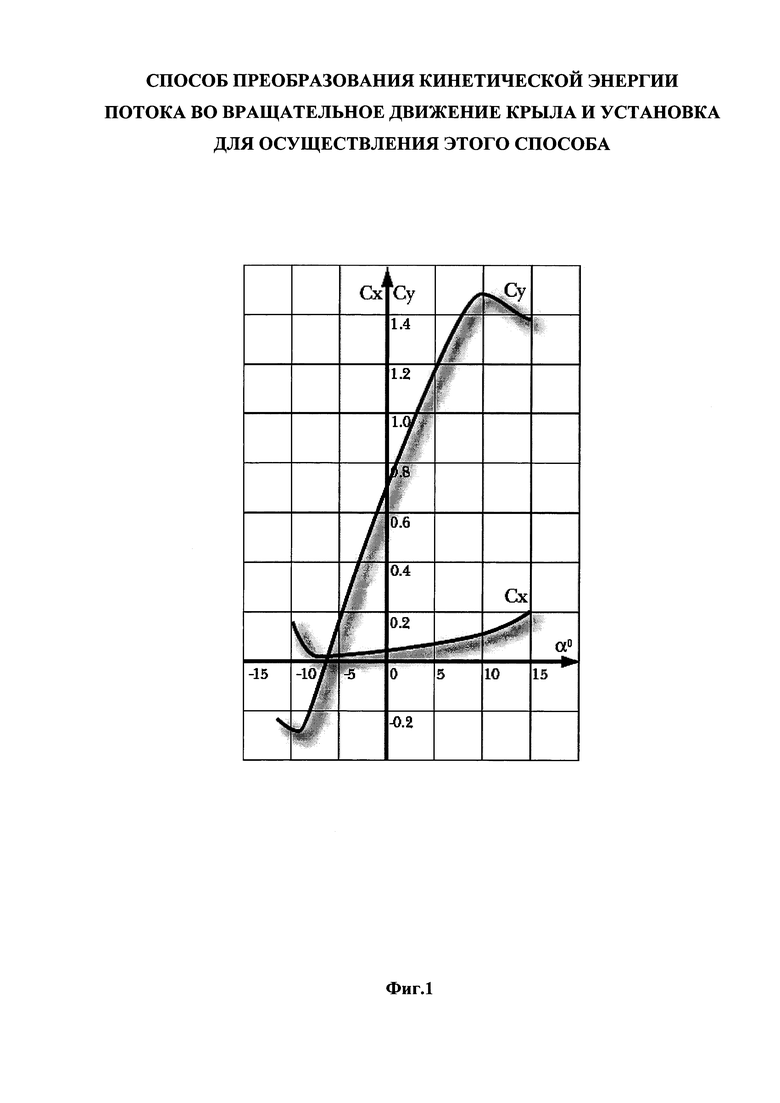
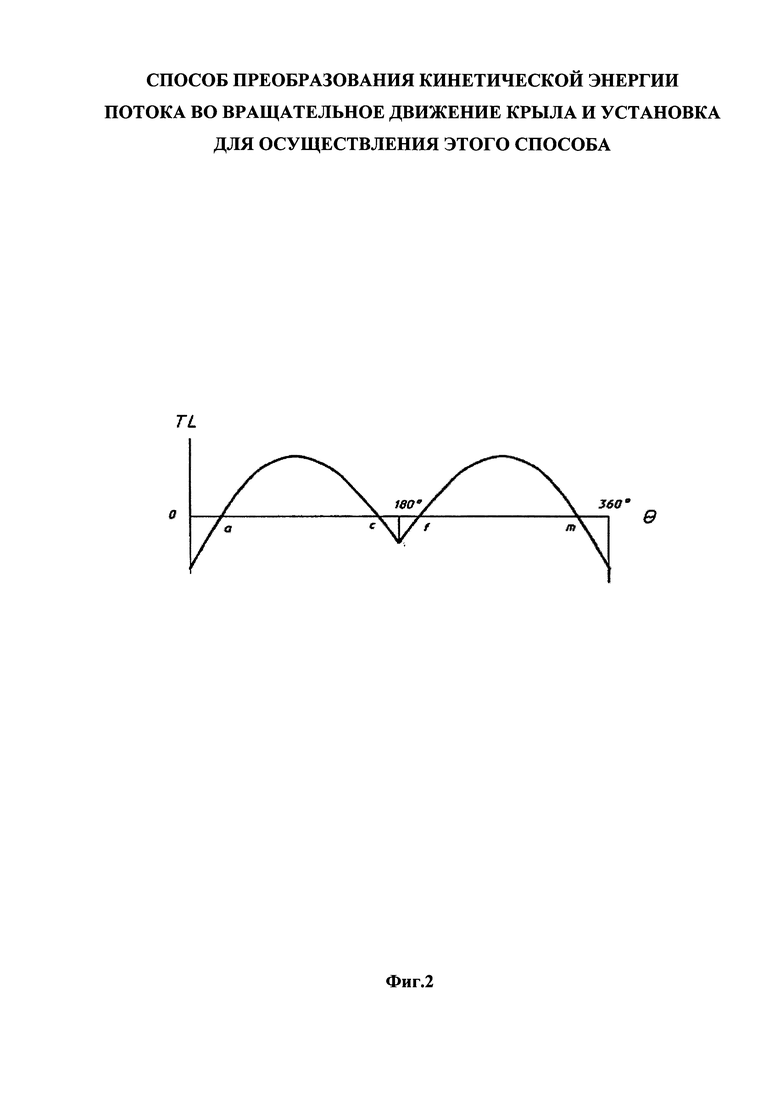
3. Рассмотренный способ обеспечивает угол атаки α крыла при его движении по дуге круговой орбиты, обращенной к потоку текучей среды, постоянным с одним знаком, по противоположной дуге - с обратным знаком. При рассмотрении известных кривых по Фиг. 1 видно, что коэффициент Cy в зоне отрицательных значений угла атаки α в разы меньше, чем при его положительном значении. В связи с этим эффективность работы установки существенно снижается. Однако на Фиг. 4 патента RU 2157919 на графике зависимости крутящего момента от положения крыла - этот факт не замечен (см. Фиг. 2).
Технический результат предлагаемого способа заключается в максимально возможной эффективности преобразования кинетической энергии текущего потока (воздушного потока - ВП в общем случае, так как по сравнению с гидропотоком требуется определять направление ВП при преобразовании в другие виды энергии). Достигается он тем, что в предлагаемом способе преобразования кинетической энергии потока во вращательное движение крыла в потоке устанавливается основной вал перпендикулярно направлению движения потока и на некотором расстоянии от основного вала энергоустановки помещают по меньшей мере одно крыло, собственная ось которого параллельна основному валу, вокруг которого это крыло под действием потока совершает вращательное движение по круговой орбите и колебательное движение вокруг собственной оси, при этом при движении крыла по круговой орбите его угол атаки α относительно результирующего вектора потока задается закрылком, узел управления которого через вал закрылка и планку закрылка вращает закрылок, обеспечивая оптимальное значение угла α атаки крыла при его движении по круговой орбите, за исключением зон изменения формы крыла, определяемых узлом положения оси крыла, причем в крайних положениях оси крыла с подшипником в этом узле определяется характер момента, задаваемого крылом, рабочий или тормозной, и в соответствии с этим автоматически выбирается соответствующий режим управления.
В результате действия на крыло ВП при движении его по круговой орбите формируется постоянная максимально возможная подъемная сила R вплоть до номинального значения энергоустановки почти по всей круговой орбите его движения. Основной вал ЭУ перпендикулярен движению ВП, в который помещена ЭУ, а ось каждого крыла параллельна основному валу и жестко зажата сверху и снизу опорными дисками.
Ось каждого крыла проходит через узел положения оси крыла (УПОК). Крыло трехслойное. Основу его составляет базовый лист крыла, к которому по переднему и заднему краям на шарнирах крепится двусторонняя подвижная фигурная аэродинамическая обшивка, причем аэродинамическая форма крыла изменяется скачком симметрично относительно базового листа при движении каждого крыла по круговой орбите в зоне изменения знака момента, формируемого крылом. Рабочий момент, формируемый крылом, осуществляет давление на свою ось рабочим краем УПОК в рабочем направлении вращения всего механизма ЭУ в пределах движения по круговой орбите относительно результирующего вектора ВП (РВВП). На рабочем крае УПОК закреплен датчик давления Д.
При этом осуществляется автоматическая подстройка угла атаки α относительно РВВП по сигналу с датчика давления Д. Этот сигнал поступает на экстремальный регулятор (ЭР) на базе контроллера, а выход последнего воздействует на серводвигатель закрылка, обеспечивая максимальное давление на ось крыла выбором оптимального значения угла атаки α крыла под воздействием своего закрылка.
При наличии датчика оборотов ЭУ можно обеспечить управление углами атаки α всех крыльев от регуляторов датчика давления Д одного контрольного крыла за счет вычисления запаздывания остальных крыльев к положению этого контрольного крыла на траектории движения по кругу с помощью контроллера. Команды управления с вычисляемым запаздыванием подаются на приводы закрылков соответствующих крыльев. При этом упрощается система управления всей ЭУ, повышается ее надежность, упрощается конструкция и уменьшается стоимость
При движении по окружности в зонах 180 градусов +Δ и 360 градусов +Δ относительно РВВП (где Δ - зона изменения формы крыла при определении тормозного момента) крылом формируется тормозной момент, противодействующий рабочему направлению движения энергоустановки. Крыло смещается относительно своей оси в УПОК вплоть до его тормозного края, на котором находится электрический конечный выключатель реверса (ЭКВР), и ЭУ кратковременно переходит в режим торможения.
Форма крыла автоматически изменяется скачком в Δ-зонах работы тормозного момента, развиваемого крылом. По команде от ЭКВР срабатывает электромеханический триггер, изменяя аэродинамическую форму крыла на симметричную относительно базового листа крыла.
Эффективный защитный режим обеспечивается следующим образом. Сигнал с датчика давления Д ограничивается номинальным значением Un, соответствующим номинальному моменту на каждом крыле. При дальнейшем увеличении скорости РВВП для ограничения сигнала с датчика давления Д вместо ЭР включается регулятор слежения (PC) за номинальным сигналом Un, воздействующий также на привод закрылка и изменяющий угол атаки крыла α, уменьшая его вплоть до отрицательных значений.
Экологическая защита обеспечивается следующим образом. По внешней окружности опорных дисков крепится ячеистая сетка, защищающая ЭУ от птиц и мусора.
В дальнейшем патентуемое изобретение поясняется конкретной конструкцией его выполнения прилагаемыми чертежами, на которых:
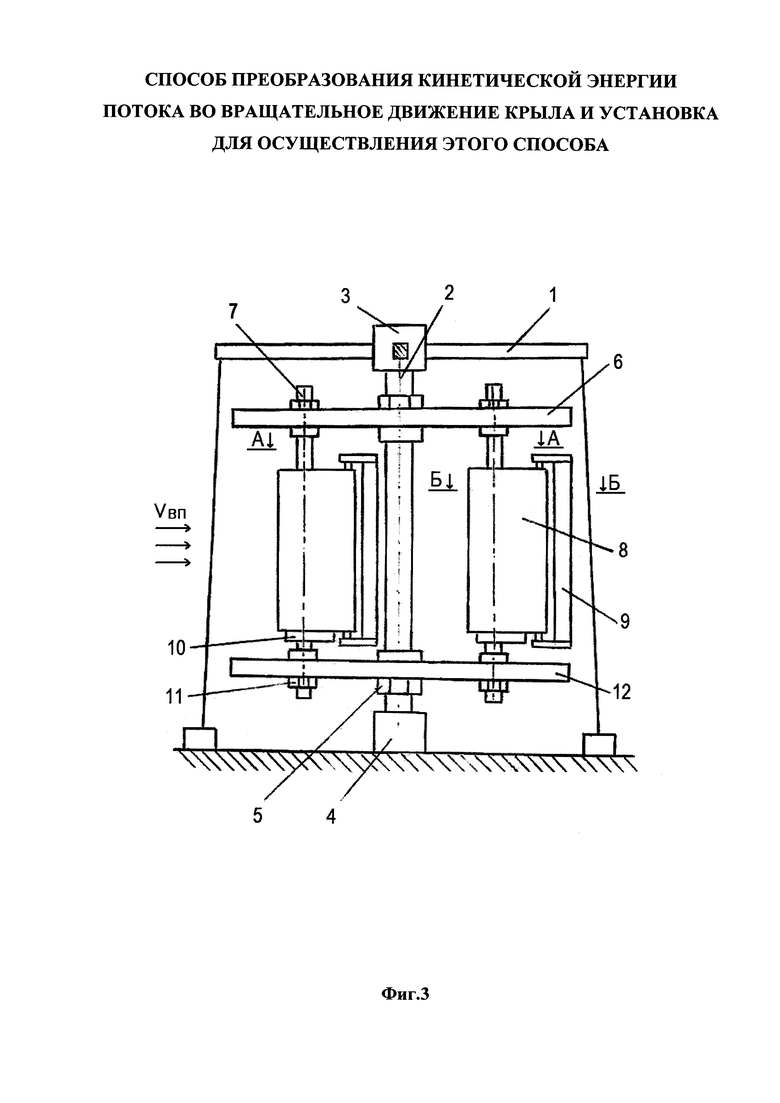
Фиг. 3 - общий вид ЭУ согласно изобретению.
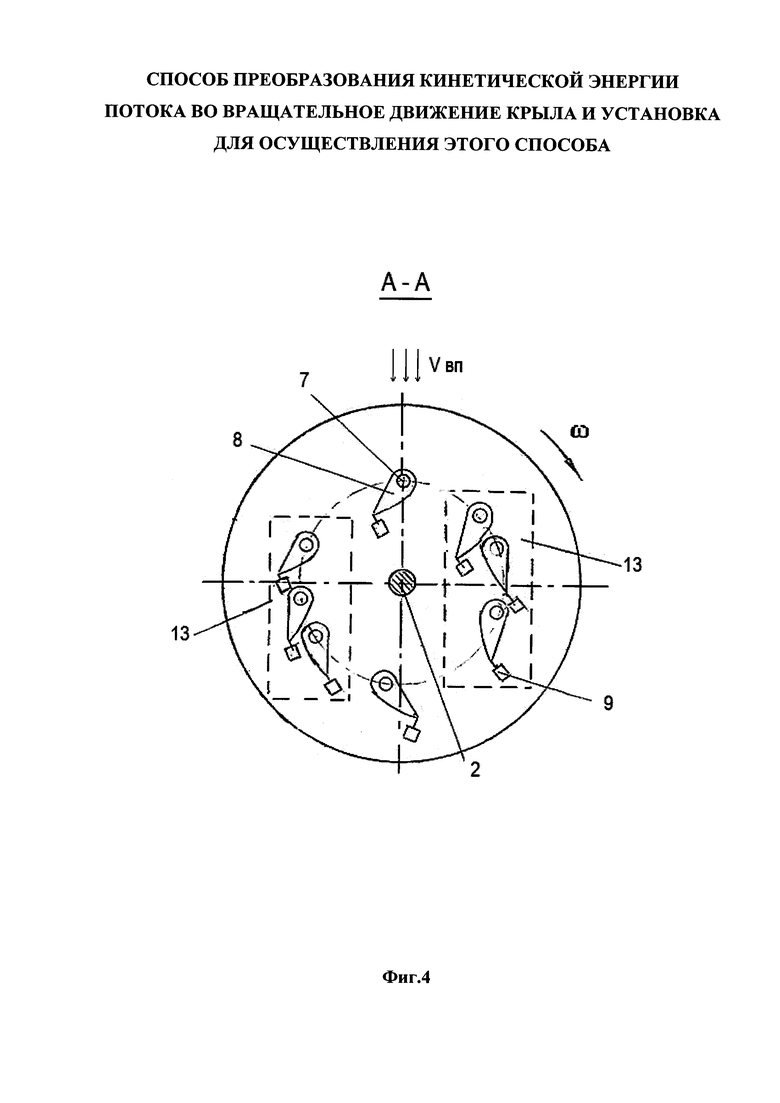
Фиг. 4 - изображает движение отдельного крыла ЭУ вначале пуска, когда скорость ВП близка к скорости РВВП.
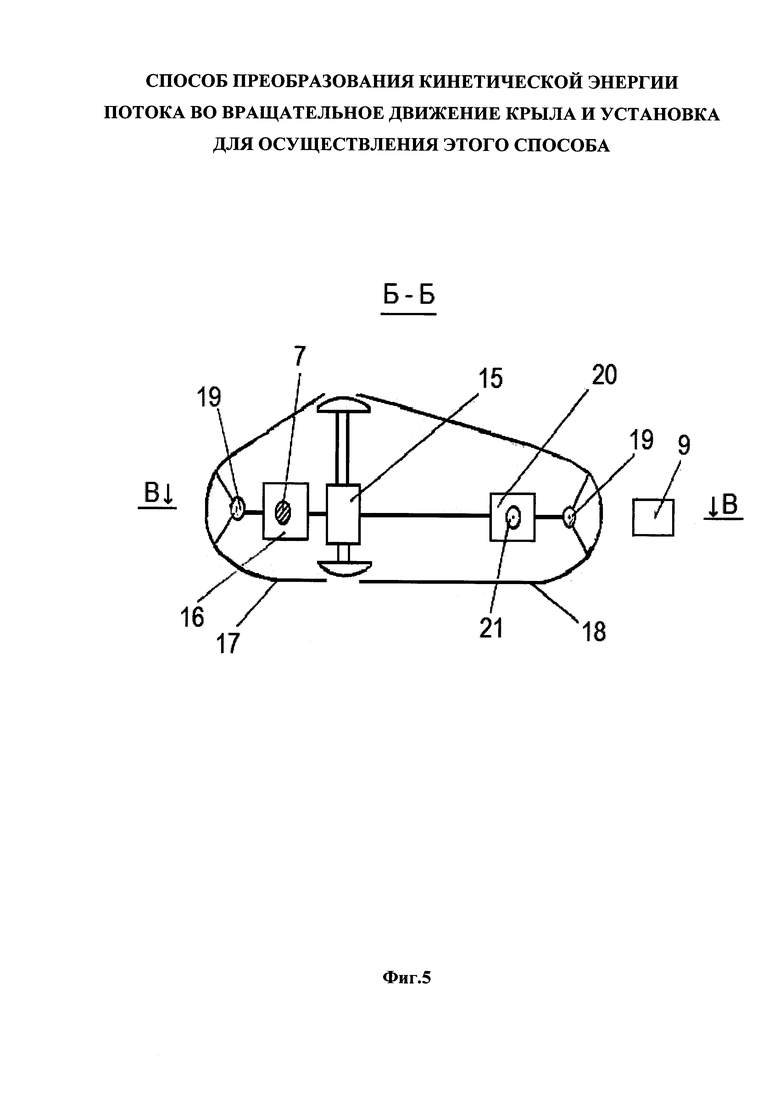
Фиг. 5 - разрез крыла по Б-Б, см. Фиг. 3.
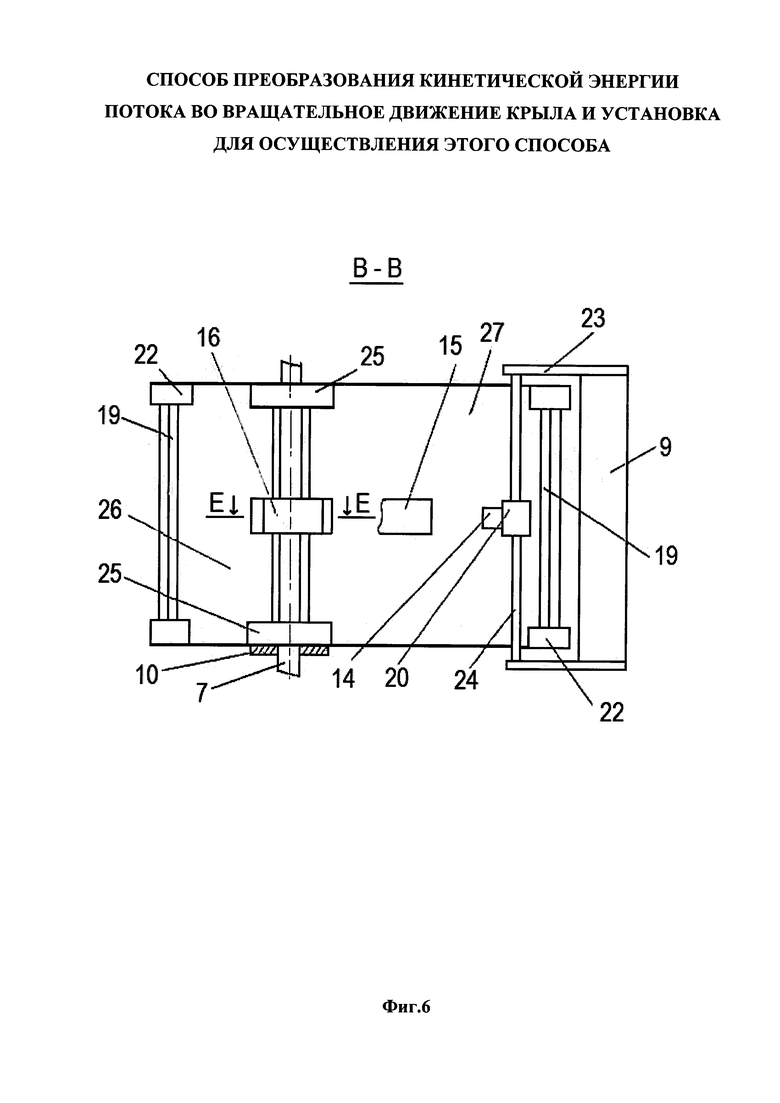
Фиг. 6 - конструкция крыла без фигурной двухсторонней аэродинамической обшивки по разрезу В-В на фиг. 5.
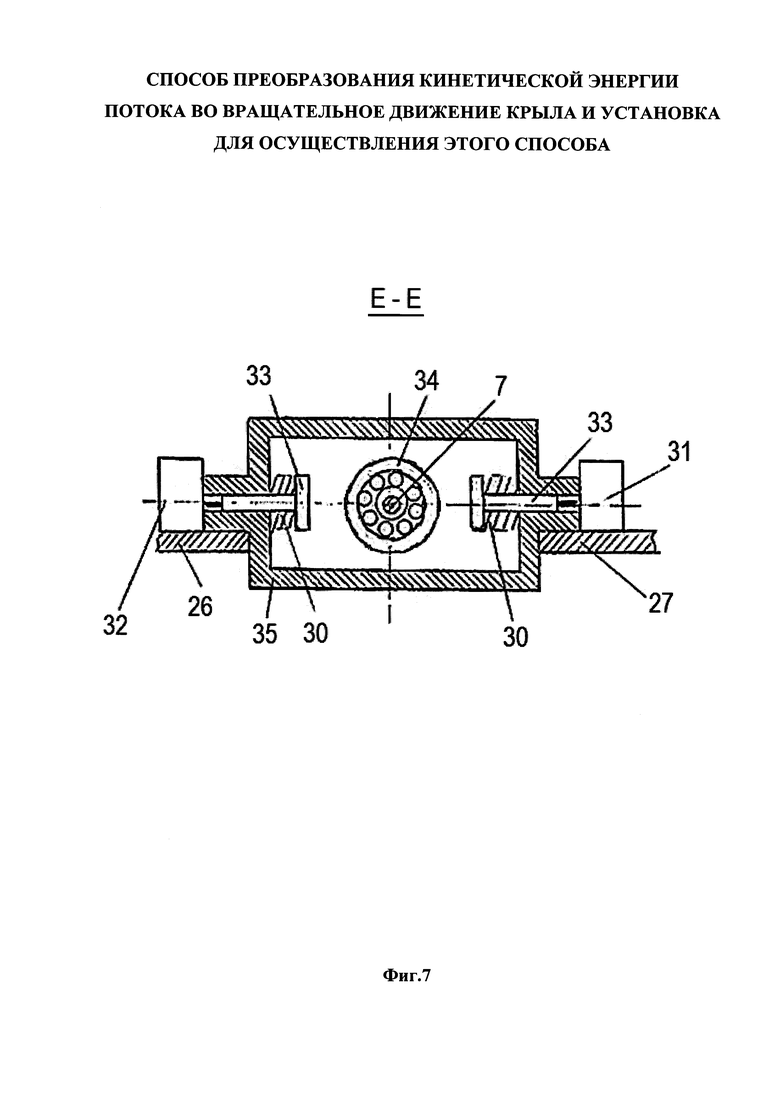
Фиг. 7 - узел положения оси крыла УПОК по разрезу Е-Е на фиг. 6
Патентуемый способ реализуется конструкцией ЭУ по Фиг. 3, где каркас 1 обеспечивает вертикальное положение основного вала 2, концы которого заходят в верхнюю 3 и нижнюю 4 опоры. Гайки основного вала 5 закрепляют верхний 6 и нижний 12 опорные диски к основному валу. На дисках фиксируются оси 7 отдельных крыльев 8 с помощью гаек крыла 11. Снизу каждое крыло 8 опирается на свою внешнюю опору 10. Важной деталью конструкции являются закрылки 9, примыкающие к каждому крылу. Ось каждого крыла 7 жестко соединена с основным валом 2 ЭУ сверху и снизу через опорные диски 6, 12, причем ЭУ может состоять из одного такого комплекта-яруса и более. При этом используется модульный принцип формирования конструкции ЭУ требуемой мощности при известной мощности одноярусной ЭУ.
На Фиг. 4 отображены отдельные детали конструкции ЭУ. Основной вал 2, ось каждого крыла 7, крылья 8, закрылки 9, зоны изменения формы крыла 13 на симметричную относительно базового листа крыла.
На фиг. 5 (в разрезе Б-Б) отображены отдельные детали в конструкции крыльев. Ось крыла 7, проходящая через узел положения оси крыла УПОК 16, закрылок 9, электромеханический триггер 15, передняя аэродинамическая обшивка крыла 17, задняя аэродинамическая обшивка крыла 18, оси поворота аэродинамических обшивок 19, узел управления закрылком 20, вал поворота закрылка 24.
На Фиг. 6 отображена конструкция крыла (по разрезу В-В). Закрылок 9, внешняя опора крыла 10, электромеханический триггер 15, УПОК 16, оси поворота аэродинамических обшивок 19, узел управления закрылком 20 с крепежом 14, опоры осей поворота 22, планка закрылка 23, вал поворота закрылка 24, проходящий через узел управления закрылком 20, внутренние опоры крыла 25, передняя часть базового листа крыла 26, задняя часть базового листа крыла 27.
На Фиг. 7 (разрез Е-Е) дана конструкция УПОК. Ось крыла 7, передняя часть базового листа крыла 26, задняя часть базового листа крыла 27, пружины 30, датчик давления Д 31, электрический конечный выключатель реверса 32, толкатели 33, подшипник 34, корпус УПОК 35.
На Фиг. 3 показан упрощенный режим движения одного крыла 8 при запуске ЭУ, когда скорость ВП VТП намного превосходит скорость вращения ω (результирующий вектор ВП, действующий на крыло, примерно равен VТП). При вращении крыла его ось 7 смещается в пределах УПОК 16. На оси 7 в пределах корпуса УПОК 35 закреплен подшипник 34 (см. Фиг. 7), который при движении УПОК относительно оси крыла снижает трение между осью и деталями УПОК (толкатели 33) в процессе работы ЭУ. В зоне изменения формы крыла 13 при возникновении тормозного момента крыла ось 7 с подшипником 34 смещается в сторону ЭКВР 32 и прижимается к соответствующему толкателю 33. ЭКВР 32 замыкает свой контакт, передавая сигнал на срабатывание электромеханического триггера 15, который по команде ЭКВР 32 поочередно выдвигает верхний или нижний грибовидный шток, изменяя в зонах 13 конфигурацию крыла 8 симметрично относительно базового листа крыла 26, 27. При этом меняет свое положение передняя 17 и задняя 18 аэродинамические обшивки крыла на оси поворота аэродинамических обшивок 19.
При изменении формы крыло задает рабочий момент. В зоне изменения формы крыла 13 при возникновении рабочего момента ось 7 с подшипником 34 смещается в сторону датчика давления 31 и прижимается к соответствующему толкателю 33, который воздействует на датчик 31. Датчик 31 задает сигнал экстремальному регулятору в узле управления закрылком 20. Этот сигнал действует в рабочем направлении вращения ЭУ в пределах движения крыла по дуге 0-180 градусов и от 180-360 градусов относительно результирующего вектора ВП.
Попадая в зону 180 градусов +Δ, снова возникает тормозной момент. Величина Δ в градусах зависит от текущей скорости установки и от быстродействия ее электромеханического триггера 15.
Экстремальный регулятор управляет сервоприводом закрылка, размещенным также в узле управления закрылком 20, и обеспечивает максимальное давление на датчик 31 в зоне рабочих моментов при движения крыла, т.е. максимально возможный рабочий момент на конкретном участке траектории. Узел управления закрылком 20, воздействуя на вал поворота закрылка 24, обеспечивает оптимальный угол атаки каждого крыла в данный момент, при этом инерцией узла 20 можно пренебречь, предполагая ЭУ большой мощности и невысокую номинальную скорость оборотов при значительном полезном нагрузочном моменте.
При наличии датчика оборотов Vω на основном валу 2 ЭУ можно обеспечить управление углами атаки α всех крыльев от датчика давления 31 и регулятора одного контрольного крыла за счет записи его траектории движения во времени и вычисления запаздывания для остальных крыльев к положению этого контрольного крыла на траектории движения по кругу с помощью контроллера. В этом случае узлы управления закрылком 20 остальных крыльев будут управляться от контроллера во всех рабочих режимах.
При получении на выходе датчика 31 сигнала, превышающего номинальное значение давления Un, когда рабочий момент под влиянием ВП превысит номинальное значение, этот сигнал переключается на вход регулятора слежения, который также находится в узле 20, и в данном режиме управляет через сервопривод закрылка, отклоняя угол атаки крыла от оптимального значения, т.е. уменьшая угол α до нуля и далее до отрицательных значений и притормаживая ЭУ при больших ветровых нагрузках, наряду с другими средствами защиты.
По внешней окружности опорных дисков крепится защитная ячеистая сетка, не изображенная на Фиг. 5, чтобы не затенять основные узлы конструкции ЭУ. Она защищает детали ЭУ от мусора, града и птиц.
Патентуемый способ преобразования кинетической энергии потока во вращательное движение крыла и установка для его осуществления могут быть успешно применены при использовании таких возобновляемых источников энергии, какими являются энергия ветра и естественное течение рек, морей, океанов и т.п. Использование заявляемого способа дает значительную экономию энергетических ресурсов.
В то же время высокая эффективность устройств, использующих оптимальный режим обтекания крыла, позволяет создавать экономически целесообразные установки при малых скоростях потока. Способ, как и установки, его реализующие, являются универсальными, так как в них могут применяться без какой-либо доработки широко распространенные в настоящее время электронные регуляторы, программируемые устройства, датчики давления и скорости, электромеханические триггеры, конечные выключатели, электрогенераторы и т.д.
Отсутствуют отходы, засоряющие окружающую среду. Вращение крыла, вызванное малоскоростным потоком, имеет настолько низкий уровень шумов, что не оказывает никакого воздействия на окружающую флору и фауну.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ВОЗДУШНОГО ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ | 2016 |
|
RU2702814C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ВОЗДУШНОГО ПОТОКА ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ПЛОСКОЙ ЛОПАСТИ | 2016 |
|
RU2664639C2 |
| ЦИЛИНДРИЧЕСКАЯ ВЕТРОТУРБИНА | 2014 |
|
RU2563558C2 |
| ЭКОЛОГИЧНАЯ И ЭНЕРГОЭФФЕКТИВНАЯ ВЕТРОТУРБИНА НА ГОРИЗОНТАЛЬНОМ ВАЛУ | 2016 |
|
RU2692602C2 |
| Карусельное ветроколесо | 2016 |
|
RU2659680C2 |
| ВЕТРОЭЛЕКТРОСТАНЦИЯ | 2017 |
|
RU2697245C2 |
| ВЕТРОГЕНЕРИРУЮЩЕЕ УСТРОЙСТВО | 2021 |
|
RU2778960C1 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ВЕТРА НА ЛЕТАЮЩЕЙ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКЕ | 2020 |
|
RU2778761C2 |
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ВЕТРА НА ЛЕТАЮЩЕЙ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКЕ | 2018 |
|
RU2697075C1 |
| КАРУСЕЛЬНОЕ ВЕТРОКОЛЕСО | 2018 |
|
RU2690306C1 |
Изобретение относится к области нетрадиционной энергетики и может быть использовано как источник электрической и механической энергии в гидро- и ветроустановках. Способ преобразования кинетической энергии потока во вращательное движение крыла заключается в том, что в потоке устанавливается основной вал перпендикулярно направлению движения потока и на некотором расстоянии от основного вала энергоустановки помещают по меньшей мере одно крыло, собственная ось которого параллельна основному валу, вокруг которого это крыло под действием потока совершает вращательное движение по круговой орбите и колебательное движение вокруг собственной оси. При движении крыла по круговой орбите его угол атаки α относительно результирующего вектора потока задается закрылком, узел управления которого через вал закрылка и планку закрылка вращает закрылок, обеспечивая оптимальное значение угла α атаки крыла при его движении по круговой орбите, за исключением зон изменения формы крыла, определяемых узлом положения оси крыла, причем в крайних положениях оси крыла с подшипником в этом узле определяется характер момента, задаваемого крылом, рабочий или тормозной, и в соответствии с этим автоматически выбирается соответствующий режим управления. Технический результат заключается в достижении максимально возможной эффективности преобразования кинетической энергии текущего потока. 2 н. и 7 з.п. ф-лы, 7 ил.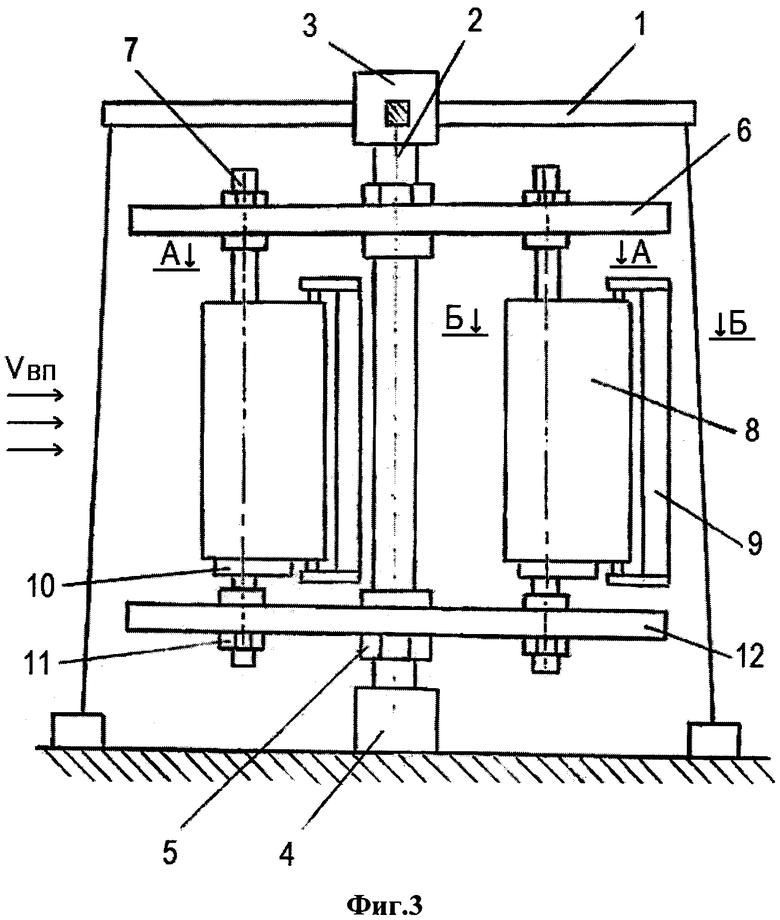
1. Способ преобразования кинетической энергии потока во вращательное движение крыла, заключающийся в том, что в потоке устанавливается основной вал перпендикулярно направлению движения потока и на некотором расстоянии от основного вала энергоустановки помещают крыло, собственная ось которого параллельна основному валу, вокруг которого это крыло под действием потока совершает вращательное движение по круговой орбите и колебательное движение вокруг собственной оси, отличающийся тем, что при движении крыла по круговой орбите его угол атаки α относительно результирующего вектора потока задается закрылком, узел управления которого через его вал и планку вращает закрылок, обеспечивая оптимальное значение угла α атаки крыла при его движении по круговой орбите за исключением зон изменения формы крыла, определяемых узлом положения оси крыла, причем в крайних положениях оси крыла с подшипником в этом узле, определяется характер момента задаваемого крылом, рабочий или тормозной, и в соответствии с этим автоматически выбирается соответствующий режим управления.
2. Способ по п. 1, отличающийся тем, что в зонах изменения формы крыла при возникновении тормозного момента крыла ось с подшипником смещается в сторону электрического конечного выключателя реверса и прижимается к соответствующему толкателю, замыкается контакт электрического конечного выключателя реверса, передавая сигнал на срабатывание электромеханического триггера, который по команде электрического конечного выключателя реверса поочередно выдвигает верхний или нижний грибовидный шток, изменяя в зонах конфигурацию крыла симметрично относительно базового листа, при этом меняет свое
положение передняя и задняя аэродинамические обшивки крыла на оси поворота аэродинамических обшивок.
3. Способ по п. 1, отличающийся тем, что в зонах изменения формы крыла при возникновении рабочего момента ось с подшипником смещается в сторону датчика давления и прижимается к соответствующему толкателю, воздействуя на датчик, задающий сигнал экстремальному регулятору давления в узле управления закрылком, который обеспечивает максимальное давление крыла в рабочем направлении вращения энергоустановки в пределах движения крыла по круговой траектории относительно результирующего вектора воздушного потока.
4. Способ по п. 1, отличающийся тем, что для упрощения системы управления энергоустановки и повышения надежности при наличии датчика оборотов на ее основном валу возможно управление углами атаки α всех крыльев от регуляторов и датчика давления одного контрольного крыла за счет запоминания его траектории движения во времени и вычисления запаздывания для остальных крыльев к положению этого контрольного крыла на траектории движения по кругу с помощью специального контроллера, который формирует команды серводвигателям в узлах управления закрылком остальных крыльев во всех рабочих режимах.
5. Способ по п. 1, отличающийся тем, что в энергоустановке при получении на выходе датчика давления сигнала, превышающего номинальное значение давления, его сигнал переключается на вход регулятора слежения, который также находится в узле управления закрылком, и в этом режиме также управляет через сервопривод положением закрылка, отклоняя угол атаки крыла от оптимального значения, т.е. уменьшая угол α до нуля и далее до отрицательных значений.
6. Энергоустановка для преобразования кинетической энергии потока во вращательное движение крыла, содержащая каркас, обеспечивающий вертикальное положение основного вала, концы которого заходят в верхнюю и нижнюю опоры, причем гайки основного вала закрепляют
верхний и нижний опорные диски к основному валу, а на дисках фиксируются оси крыльев с помощью гаек крыла, к тому же снизу каждое крыло опирается на свою внешнюю опору, важной деталью конструкции энергоустановки являются закрылки, закрепленные на каждом крыле с помощью вала закрылка и планки закрылка.
7. Энергоустановка по п. 6, отличающаяся тем, что в состав узла положения оси крыла входит собственно ось крыла с насаженным на нее подшипником, который в процессе перемещения крыла по круговой траектории прижимается поочередно к толкателям, сжимая соответствующие пружины и воздействуя на датчик давления или электрический конечный выключатель реверса, причем все детали этого узла размещаются в его корпусе.
8. Энергоустановка по п. 6, отличающаяся тем, что в состав конструкции крыла входит закрылок, который через планку соединен с валом поворота закрылка, выходящим из узла управления закрылком, а ось крыла проходит через узел положения оси крыла и опоры крыла, на которых закреплены передняя и задняя часть базового листа, а на базовых листах расположены электромеханический триггер и оси поворота аэродинамических обшивок со своими опорами.
9. Энергоустановка по п. 6, отличающаяся тем, что по внешней окружности опорных дисков крепится защитная сетка, которая защищает детали энергоустановки от мусора, града и птиц.
| СПОСОБ ПРЕОБРАЗОВАНИЯ КИНЕТИЧЕСКОЙ ЭНЕРГИИ ТЕКУЧЕЙ СРЕДЫ ВО ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ КРЫЛА И УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1996 |
|
RU2157919C2 |
| ВЕТРОДВИГАТЕЛЬ | 2009 |
|
RU2399792C1 |
| Трамбовка | 1929 |
|
SU12414A1 |
| Ветроколесо | 1985 |
|
SU1281740A1 |
| KR 20100109235 A, 10.08.2010 | |||
| US 5503525 A, 02.04.1996 | |||
| US 4247251 A, 27.01.1981. | |||

