ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к аудиоустройству и способу аудиообработки и, в частности, но не исключительно, к компенсации эха для акустического эха.
УРОВЕНЬ ТЕХНИКИ
Многие аудиоприложения используют в одном и том же аудиоокружении как аудиопреобразователь, такой как громкоговоритель, так и микрофон. Например, приложения, связанные с телефоном или аудиоконференциями, обычно используют громкоговорители и микрофоны, расположенные в непосредственной близости.
Однако акустическая связь между громкоговорителем и микрофоном приводит к тому, что сигнал микрофона включает в себя элементы звука, создаваемого громкоговорителем, что часто влечет за собой определенные неудобства.
Например, в случае устройств для телефонной связи и телеконференций, акустическая связь между громкоговорителем устройства и микрофоном приводит к тому, что часть сигнала, генерируемого громкоговорителем, будет захватываться микрофоном и передаваться обратно удаленному пользователю, что, в свою очередь, приводит к возникновению возмущения, известного как акустическое эхо. Обычно предполагается, что такой тракт эхо-сигнала может быть достаточно точно смоделирован с использованием линейного фильтра, поскольку микрофон принимает отражения сигнала громкоговорителя с различными задержками и интенсивностями, зависящими от акустического окружения, в котором используется устройство. Таким образом, линейные эхокомпенсаторы широко используются для уменьшения акустического эха.
Однако на практике, а также в зависимости от устройства, компоненты тракта акустического эхо также включают в себя аудиоусилитель и громкоговоритель, которые часто обладают нелинейными характеристиками. Таким образом, чисто линейная компенсация эхо, как правило, является недостаточной и не способна полностью компенсировать акустическое эхо.
Основными источниками нелинейностей в громкоговорителях являются неоднородная плотность магнитного потока и нелинейная система подвески. Последний фактор дает вклад главным образом в искажения на низких частотах, тогда как первый фактор проявляется посредством высокоамплитудных сигналов. Фактически, сильные смещения конуса, в особенности находящиеся вне диапазона линейной работы громкоговорителя, приводят к появлению нелинейных искажений.
Можно рассмотреть более подробно поведение системы громкоговорителя для различных диапазонов частот входных сигналов. Для частот, превышающих резонансную частоту, громкоговоритель может быть охарактеризован сопротивлением и индуктивностью его звуковой катушки. Таким образом, поскольку входная мощность, подаваемая на звуковую катушку, увеличивается и продольные колебания становятся достаточно большими для выхода катушки за пределы магнитного поля, движущая сила уменьшается, что приводит к формированию эффекта сжатия, или эффекта ограничения.
На низких частотах громкоговоритель главным образом характеризуется импедансом его подвижной системы, пропорциональным мощности магнитного потока. Это означает, что при смещении звуковой катушки вне магнитного поля, упомянутый импеданс уменьшается и, следовательно, вместо ограничения (отсечки сигнала), амплитуда тока в звуковой катушке в действительности увеличивается перед тем, как подвесная система громкоговорителя ограничит перемещение.
Надлежащее моделирование нелинейного поведения громкоговорителей до сих пор представляет собой трудноразрешимую задачу в области техники, относящейся к компенсации акустического эхо. Это особенно актуально для систем связи с функцией "свободные руки", в которых используются дешевые аудиокомпоненты, такие, как усилители и громкоговорители. Такие компоненты часто вводятся в нелинейный диапазон работы для получения высокого уровня звука на выходе, требуемого для таких приложений. Получающиеся в результате нелинейные искажения не только ограничивают эффективность компенсаторов акустического эхо, которые часто ориентированы на линейную импульсную переходную характеристику между громкоговорителем и микрофоном, но также негативно влияют на наблюдаемое качество сигнала громкоговорителя.
Таким образом, системы обработки нелинейного акустического эхо играют значительную роль в улучшении качества аудио в системах двусторонней связи.
В уровне техники существуют три основных типа систем для компенсации или подавления нелинейного акустического эха.
1. Нелинейная компенсация акустического эха.
2. Линеаризация громкоговорителя для линейной компенсации акустического эхо.
3. Нелинейное подавление акустического эха.
В системах первого типа нелинейность тракта акустического эхо моделируется компенсатором акустического эхо. Например, насыщение аудиоусилителя может моделироваться с использованием функции ограничения с уровнем ограничения, соответствующим таковому у аудиоусилителя. Если такая функция ограничения применяется к цифровому сигналу громкоговорителя, то для моделирования линейного акустического тракта между громкоговорителем и микрофоном может использоваться стандартный линейный компенсатор акустического эхо (эхокомпенсатор). Как уже упоминалось выше, громкоговоритель также является источником нелинейностей. В отличие от функции ограничения, которая не обладает памятью, нелинейности громкоговорителя обычно содержат некоторые формы памяти, и, как правило, моделируются расширением ряда Вольтерра, что требует довольно больших вычислительных ресурсов. Несмотря на существование недорогих версий алгоритмов, основанных на ряде Вольтерра, например, разложения в степенной ряд, зачастую они все еще требуют использования способов ортогонализации сигналов, которые по-прежнему связаны с интенсивными вычислениями.
Основным недостатком систем первого типа является то, что от них требуется точное соответствие используемой модели реальной физической системе. Обычно это не может быть выполнено с высокой степенью точности. Помимо этого, такие системы, как правило, требуют интенсивных вычислений.
Второй тип систем применяет нелинейную функцию в отношении сигнала громкоговорителя таким образом, чтобы конкатенация этой функции с передаточной функцией громкоговорителя аппроксимировала линейную функцию, и, следовательно, чтобы сигнал громкоговорителя, захваченный микрофоном устройства, приблизительно представлял собой линейную функцию сигнала громкоговорителя. Таким образом, для моделирования этой линейной функции и компенсации акустического эхо, могут использоваться стандартные адаптивные линейные фильтры.
Недостаток такого подхода заключается в том, что он может только приблизительно линеаризовать выходной сигнал громкоговорителя, и производительность обычно снижается при возникновении насыщения усилителя, поскольку такое преобразование с трудом поддается линеаризации.
Третий тип систем часто используется в качестве этапа постобработки после компенсации акустического эхо, на котором подавляются нелинейные остаточные акустические эхо, которые не удалось подавить на этапе компенсации эхо. Обычно такое подавление выполняют в области энергетического спектра, используя спектральную модель нелинейности эхо.
Основной недостаток такого подхода заключается в том, что вследствие избыточного подавления и отсутствия информации о фазе эхо в области энергетического спектра аудиосигнал на ближнем конце линии связи (и в особенности речь), генерируемый в местном окружении, может очень сильно уменьшаться, что может затруднить полнодуплексную связь с дальним концом линии связи.
Поводя итог сказанному выше, подходы уровня техники к компенсации эхо как правило являются сложными, приводят к неоптимальной производительности и/или требуют больших вычислительных ресурсов.
Таким образом, улучшенный подход мог бы обеспечить определенные преимущества, в частности, подход, обеспечивающий большую гибкость, меньшую сложность, более легкую реализацию, сниженное потребление ресурсов, и/или улучшенную производительность.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Соответственно, настоящее изобретение направлено на уменьшение, смягчение или устранение одного или более из перечисленных выше недостатков по отдельности или в любой комбинации.
В соответствии с одним из аспектов изобретения предоставляется аудиоустройство, содержащее: схему для осуществления обработки для настройки динамического диапазона в отношении входного сигнала для генерации выходного сигнала для воспроизведения громкоговорителем, причем обработка для настройки динамического диапазона зависит от набора параметров настройки динамического диапазона; первый линейный фильтр компенсации эхо для генерации первого компенсированного сигнала из входного аудиосигнала; первый адаптер для определения набора параметров фильтра для первого линейного фильтра компенсации эхо в ответ на первый компенсированный сигнал и микрофонный сигнал; схему для генерации второго компенсированного сигнала путем применения обработки для настройки динамического диапазона и применения второго фильтра компенсации эхо в отношении входного сигнала, причем второй фильтр компенсации эхо соответствует первому фильтру компенсации эхо; второй адаптер для определения набора параметров настройки динамического диапазона в ответ на второй компенсированный сигнал и микрофонный сигнал.
Такой подход может обеспечить улучшенную линеаризацию работы системы воспроизведения, в которой образуется акустическая обратная связь или эхо. Изобретение может ослабить влияние нелинейностей, например, в драйвере аудиопреобразователя (например, усилителе) и/или аудиопреобразователе (например, громкоговорителе).
Изобретение может обеспечить улучшенную производительность в рамках многих вариантов осуществления. В частности, улучшенная компенсация эхо может быть достигнута во многих приложениях.
Одно из достоинств заключается в том, что улучшения могут быть получены для разнообразных видов акустического эхо и систем воспроизведения без специальных знаний или моделирования систем воспроизведения (например, без необходимости оценки или моделирования усилителей мощности или аудиопреобразователей). Во многих вариантах осуществления устройство может автоматически адаптироваться к конкретным характеристикам конкретной системы воспроизведения. Например, изобретение может обеспечить систему, которая обеспечивает улучшенную линеаризацию, не требуя каких-либо знаний о характеристиках нелинейности усилителя мощности или громкоговорителя, используемых в системе.
Другое преимущество заключается в том, что данный подход может компенсировать, например, связанные со старением изменения компонентов в аудиотракте, или, например, изменения, относящиеся к источнику питания аудиоусилителя, который, в случае устройств с батарейным питанием, также меняется с течением времени между подзарядками.
Такая конкретная структура может позволить разработку системы, которая автоматически адаптируется в отношении рабочей точки, что обеспечивает требуемую линеаризацию без избыточного ограничения динамического диапазона выходного сигнала. В частности, использование первого и второго компенсированных сигналов, генерируемых в соответствии с изобретением, может обеспечить эффективную адаптацию как первого фильтра компенсации эхо, так и обработки для настройки динамического диапазона. Взаимодействие компенсации эхо и обработки для настройки динамического диапазона может обеспечить систему, которая для различных сценариев сдвигает адаптацию обработки для настройки динамического диапазона в различных направлениях. Это может обеспечить улучшенную адаптацию, поскольку рабочая точка может сдвигаться в направлении оптимума с различных направлений.
Например, во многих вариантах осуществления и сценариях, параметры настройки динамического диапазона будут адаптироваться в направлении усиления ограничения динамического диапазона в случае слишком больших нелинейностей, и в направлении ослабления ограничения динамического диапазона в случае слишком слабых нелинейностей.
В устройстве используются контуры адаптации. Например, первый компенсированный сигнал генерируется первым фильтром компенсации эхо, который адаптируется, основываясь на первом компенсированном сигнале. Похожим образом, второй компенсированный сигнал может генерироваться при выполнении обработки для настройки динамического диапазона (и компенсации эхо) в отношении входного сигнала, причем обработка для настройки динамического диапазона адаптируется, основываясь на втором компенсированном сигнале. Свойства таких контуров обратной связи могут быть заданы для обеспечения требуемых параметров контура, например, конкретных желаемых динамических параметров. Во многих сценариях может использоваться система дискретизации, где адаптация (например, параметры настройки динамического диапазона и/или первый набор параметров) для одной выборки основана на величинах компенсированного сигнала одного или более предшествующих выборок.
Первый адаптер может, в частности, генерировать значения обновления для параметров набора параметров фильтра. Второй адаптер может, в частности, генерировать значения обновления для параметров набора параметров настройки динамического диапазона.
Второй фильтр компенсации эхо может, в частности, соответствовать первому фильтру компенсации эхо, будучи определенным теми же параметрами, т.е. первым набором параметров. В некоторых вариантах осуществления может присутствовать временной сдвиг при адаптации первого фильтра компенсации эхо и второго фильтра компенсации эхо. Например, первый набор параметров, используемый для первого фильтра компенсации эхо, может генерироваться для предшествующей выборки сигнала, тогда как первый набор параметров, используемый для второго фильтра компенсации эхо, может представлять собой набор, определенный для текущей выборки сигнала. В некоторых вариантах осуществления параметры фильтра для второго фильтра компенсации эхо могут соответствовать параметрам фильтра, используемым для первого фильтра компенсации эхо при их сочетании со значениями обновления, определенными первым адаптером.
Обработка для настройки динамического диапазона может выполнятся таким образом, что при этом ограничивается динамический диапазон входного сигнала.
В соответствии с опциональным признаком настоящего изобретения обработка для настройки динамического диапазона представляет собой обработку для нелинейной настройки динамического диапазона.
В некоторых вариантах осуществления обработка для настройки динамического диапазона может представлять содой линейную настройку динамического диапазона, например, использующую изменяемое усиление, которое зависит от параметров настройки динамического диапазона.
Однако во многих вариантах осуществления обработка для настройки динамического диапазона может представлять собой обработку для нелинейной настройки динамического диапазона, что обеспечивает дополнительные преимущества. Это может обеспечить улучшенную производительность и может, в частности, обеспечить улучшенные уровни звука для данного усилителя мощности или громкоговорителя.
В соответствии с оптимальным признаком настоящего изобретения аудиоустройство дополнительно содержит усилитель с изменяемым коэффициентом усиления, выполненный с возможностью масштабирования входного сигнала в ответ на оценку уровня сигнала входного сигнала, и по меньшей мере один параметр из набора параметров настройки динамического диапазона.
Это может обеспечить улучшенную производительность в рамках многих вариантов осуществления. В частности, комбинация переменного усиления и обработки для нелинейной настройки динамического диапазона может обеспечить улучшенный баланс между различными характеристиками, например, между уровнем звука и искажениями.
В соответствии с опциональным признаком изобретения упомянутый, по меньшей мере, один параметр представляет собой параметр ограничения уровня.
Это может обеспечить улучшенную производительность в рамках многих вариантов осуществления. В частности, комбинация переменного усиления и обработки для настройки динамического диапазона с учетом ограничения может обеспечить улучшенный компромисс между различными характеристиками, например, между уровнем звука и искажениями.
Ограничение может представлять собой мягкое или жесткое ограничение.
В соответствии с опциональным признаком изобретения обработка для нелинейной настройки динамического диапазона содержит ограничение сигнала.
Это может обеспечить улучшенную производительность в рамках многих вариантов осуществления. В частности, обработка для настройки динамического диапазона с учетом ограничения может обеспечить улучшенный компромисс между различными характеристиками, например, между уровнем звука и искажениями.
В соответствии с опциональным признаком изобретения, ограничение сигнала представляет собой жесткое ограничение.
Это может обеспечить малую сложность и/или улучшенную производительность во многих ситуациях и в рамках многих вариантов осуществления.
В соответствии с опциональным признаком изобретения, аудиоустройство дополнительно содержит эхокомпенсатор, выполненный с возможностью компенсации эхо в отношении микрофонного сигнала, основываясь на выходном сигнале.
Сочетание упомянутого подхода генерации выходного сигнала с отдельным эхокомпенсатором может обеспечить исключительно хорошую производительность. В частности, улучшенная линеаризация может обеспечить улучшенную компенсацию эхо эхокомпенсатором.
Такой подход может, помимо этого, обеспечить возможность разработки эхокомпенсатора, не зависящего от функций, которые осуществляют и адаптируют обработку для настройки динамического диапазона. Это может облегчить реализацию и может, в частности, обеспечить более простое введение, например, предварительной обработки в существующие системы компенсации эхо.
В соответствии с опциональным признаком изобретения зхокомпенсатор представляет собой линейный эхокомпенсатор.
Изобретение может обеспечить улученную производительность линейного эхокомпенсатора.
В соответствии с опциональным признаком изобретения, эхокомпенсатор не зависит от первого компенсированного сигнала, второго компенсированного сигнала и входного сигнала.
В некоторых вариантах осуществления работа эхокомпенсатора может быть основана исключительно на выходном сигнале и микрофонном сигнале.
В соответствии с опциональным признаком изобретения первый адаптер выполнен с возможностью генерации разностного сигнала между первым компенсированным сигналом и микрофонным сигналом и возможностью модифицирования набора параметров фильтра для уменьшения разностного сигнала.
Это может обеспечить улучшенную работу и/или производительность и может во многих вариантах осуществления облегчить реализацию.
В соответствии с опциональным признаком изобретения второй адаптер выполнен с возможностью генерации разностного сигнала между вторым компенсированным сигналом и микрофонным сигналом и возможностью модифицирования набора параметров настройки динамического диапазона для уменьшения разностного сигнала.
Это может обеспечить улучшенную работу и/или производительность и может во многих вариантах осуществления облегчить реализацию.
В соответствии с опциональным признаком изобретения параметры настройки динамического диапазона определяют функцию, соотносящую значения входного сигнала со значениями выходного сигнала.
Это может обеспечить улучшенную работу и/или производительность и может во многих вариантах осуществления облегчить реализацию.
В соответствии с одним из аспектов изобретения предоставляется способ аудиообработки, содержащий: осуществление обработки для настройки динамического диапазона в отношении входного сигнала для генерации выходного сигнала для его воспроизведения громкоговорителем, причем нелинейная обработка зависит от набора параметров настройки динамического диапазона; генерацию первого компенсированного сигнала из входного аудиосигнала первым фильтром компенсации эхо; определение набора параметров фильтра для первого линейного фильтра компенсации эхо в ответ на первый компенсированный сигнал и микрофонный сигнал; генерацию второго компенсированного сигнала путем применения обработки для настройки динамического диапазона и применения второго фильтра компенсации эхо в отношении входного сигнала, причем второй фильтр компенсации эхо соответствует первому фильтру компенсации эхо; и определение набора параметров настройки динамического диапазона в ответ на второй компенсированный сигнал и микрофонный сигнал.
Этот и другие аспекты, признаки и преимущества, обеспечиваемые изобретением, будут очевидны и описаны ниже со ссылками на варианты осуществления изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Варианты осуществления изобретения будут описаны исключительно с иллюстративной целью со ссылками на чертежи, на которых:
Фиг. 1 иллюстрирует пример аудиоустройства в соответствии с некоторыми вариантами осуществления изобретения.
Фиг. 2 иллюстрирует пример аудиоустройства в соответствии с некоторыми вариантами осуществления изобретения.
Фиг. 3-6 иллюстрируют различные функции обработки для настройки динамического диапазона для аудиоустройства по Фиг. 1 или 2.
Фиг. 7 и 8 иллюстрируют примеры нелинейностей для элементов тракта воспроизведения аудио.
Фиг. 9 иллюстрирует пример акустической импульсной переходной характеристики для акустического эха.
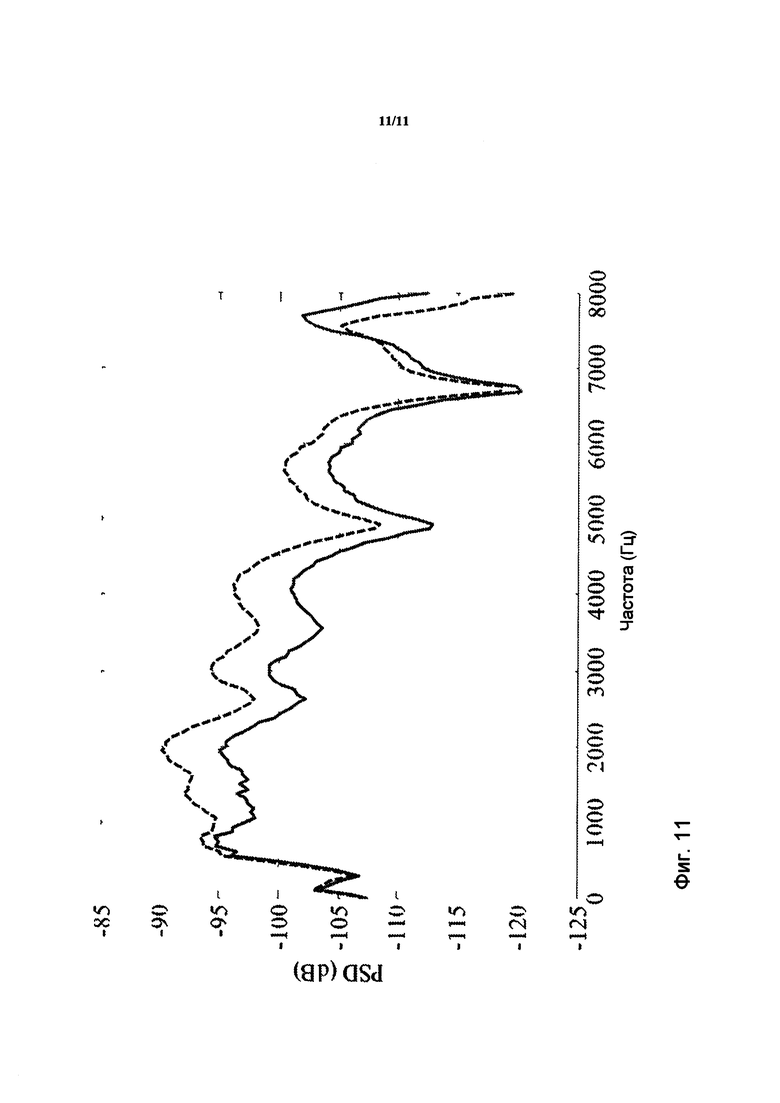
Фиг. 10 и 11 иллюстрируют примеры PSD для сигналов ошибки в аудиоустройстве по Фиг. 1 или 2.
ПОДРОБНОЕ ОПИСАНИЕ НЕКОТОРЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В приведенном ниже описании основной акцент делается на вариантах осуществления изобретения, применимых в системах компенсации эхо для телекоммуникационных систем. Однако следует отметить, что изобретение не ограничено упомянутой областью применения и может применяться во многих других системах и областях.
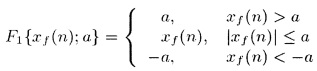
Фиг. 1 иллюстрирует пример аудиоустройства в соответствии некоторыми вариантами осуществления изобретения. В конкретном примере аудиоустройство является системой компенсации эхо.
Система содержит громкоговоритель 101, который воспроизводит аудио в акустическом окружении. Микрофон 103 записывает аудио из акустического окружения для создания сигнала, отражающего аудио из локального источника в аудио окружении. В частности, эта система может быть использована как часть телекоммуникационной системы, где громкоговоритель 101 используется для воспроизведения аудио от удаленного источника, и микрофон 103 используется для приема локального аудио, которое передается на удаленный конец линии связи. Однако, подобной конфигурации присуща проблема, заключающаяся в том, что микрофон 103 обычно также принимает аудио от громкоговорителя 101, что приводит к тому, что, если не выполняется компенсация эхо, эхо посылается на удаленный конец линии связи.
Соответственно, система также включает в себя эхокомпенсатор 105, который связан с громкоговорителем 101 и который принимает возбуждающий сигнал для громкоговорителя 101. Эхокомпенсатор 105 генерирует сигнал компенсации эхо и связан с вычитателем 107, который далее связан с микрофоном 103 и который принимает от него микрофонный сигнал. Вычитатель 107 может рассматриваться как часть эхокомпенсатора или как отдельное устройство.
Сигнал компенсации эхо обеспечивает оценку компонента сигнала микрофона, который обусловлен аудиосигналом от громкоговорителя 101. Выход вычитателя 107 представляет собой микрофонный сигнал минус сигнал компенсации эхо и, таким образом, идеально соответствует микрофонному сигналу с удаленным акустическим эхо. На выходе вычитателя 107 соответственно генерируется сигнал с компенсированным эхом, который может быть передан на дальний конец линии связи.
Эхокомпенсатор 105 представляет собой адаптивный эхокомпенсатор, который настраивает свою работу, основываясь на выходе вычитателя 107. Таким образом, выходной сигнал из вычитателя 107 также подается в эхокомпенсатор 105, где он используется для адаптации оценки эхокомпенсатора 105. Как правило, эхокомпенсатор 105 реализует адаптивный фильтр, который оценивает передаточную функцию от входа на громкоговоритель 101 до микрофонного входа вычитателя 107. Адаптивный фильтр адаптируется, основываясь на сигнале с компенсированным эхом, и, как правило, при адаптации выполняется минимизация уровня сигнала с компенсированным эхо.
Следует отметить, что специалисту в данной области известно большое количество алгоритмов компенсации эхо, и что может быть использован любой пригодный подход без выхода за пределы объема настоящего изобретения. Например, для адаптации коэффициентов линейного адаптивного фильтра может использоваться метод алгоритм минимальной среднеквадратичной ошибки (LMS).
Следует отметить, что на Фиг. 1 для большей ясности изображена система в упрощенном виде. Например, большинство реальных систем будут включать в себя усилитель, аудиопреобразователь, фильтры и т.п. На Фиг. 1 громкоговоритель 101 может рассматриваться как отражающий весь тракт воспроизведения сигнала от входа эхокомпенсатора 105 до собственно воспроизведения аудиосигнала, и, таким образом, может в частности включать в себя характеристики усилителя, аудиопреобразователя и т.д.
Аналогично, выходной сигнал микрофона, как правило, фильтруется и усиливается, и микрофон 103 на Фиг. 1 может рассматриваться как представляющий все части тракта сигнала от момента захвата аудио до подачи сигнала в вычитатель 107, т.е. он может рассматриваться как включающий в себя микрофонные усилители, фильтры и т.п.
Таким образом, эхокомпенсатор 105 пытается компенсировать акустическое эхо путем оценки всего сигнального тракта от входа эхокомпенсатора 105 (обозначенного xf(n)) до входа вычитателя 107 (обозначенного z(n)).
Однако таким системам присуща проблема, заключающаяся в том, что эхокомпенсаторы для обеспечения эффективной компенсации эхо как правило требуют, чтобы тракт был по существу линейным. В частности, большинство реальных высокопроизводительных эхокомпенсаторов, как правило, являются линейными эхокомпенсаторами и, как таковые, способны компенсировать только линейные эффекты в сигнале. Однако множество реальных компонентов воспроизведения, как правило, обладают нелинейными эффектами, в особенности когда они используются интенсивно.
Например, для максимизации уровня звукового давления громкоговорители и усилители мощности часто используются вблизи границ их линейной работы. Таким образом, на практике нелинейные эффекты могут возникать довольно часто, что, как правило, приводит к неэффективности компенсации эхо.
В системе, показанной на Фиг. 1, улучшенная производительность достигается благодаря присутствию препроцессора 109, который выполнен с возможностью обработки сигнала, предназначенного для воспроизведения, до его подачи в громкоговоритель 101.
Препроцессор 109 выполнен с возможностью выполнения настройки динамического диапазона для входного сигнала, результатом чего является более линейная работа громкоговорителя 101 (т.е., как правило, тракта усилителя мощности и аудиопреобразователя). Это может обеспечить улучшенную производительность и может, в частности, обеспечить более эффективную работу эхокомпенсатора 105 и улучшенную компенсацию эхо. Препроцессор 109 выполнен с возможностью адаптировать настройку динамического диапазона и, соответственно, принимает на входе микрофонный сигнал. Следует отметить, что препроцессор 109 также может принимать на входе выходной сигнал акустического эхокомпенсатора 105 и выходной сигнал вычитателя 107, поскольку сумма этих сигналов также совпадает с микрофонным сигналом. Однако в данном конкретном примере в препроцессор 109 подается микрофонный сигнал, поскольку доступ к выходному сигналу акустического эхокомпенсатора 105 и выходному сигналу вычитателя 107 не всегда возможен.
Таким образом, в системе входной сигнал х(n) направляется в препроцессор 109, который генерирует выходной сигнал, который далее обозначается как сигнал xf(n) возбуждения. Сигнал возбуждения воспроизводится, и на Фиг. 1 показано, что он воспроизводится громкоговорителем 101. Следует отметить, что во многих вариантах осуществления выходной сигнал препроцессора 109 (т.е. сигнал возбуждения) не подается непосредственно на аудиопреобразователь, а подается на различные функциональные узлы аудиообработки, что включает в себя усиление мощности, фильтрацию, цафроаналоговое преобразование и т.п. Таким образом, ниже громкоговоритель 101 может рассматриваться как включающий в себя все элементы тракта сигнала от выхода препроцессора 109 до воспроизведенного аудиосигнала.
Микрофон 103 захватывает микрофонный сигнал z(n), который отражает аудио в акустическом окружении. Следует отметить, что микрофонный сигнал z(n), в отношении которого выполнена операция компенсации эхо, как правило отличается от сигнала, непосредственно выдаваемого микрофонным модулем, и он, как правило, сначала усиливается, фильтруется, дискретизируется и т.п. Таким образом, ниже микрофон 103 может рассматриваться как включающий в себя все элементы тракта сигнала от аудиосигнала в акустическом окружении до сигнала, который подается в препроцессор 109.
Таким образом, на Фиг. 1 препроцессор 109 принимает входной сигнал х(n), который предназначен для воспроизведения громкоговорителем 101. Помимо этого, он принимает входной сигнал, захваченный микрофоном 103. Затем препроцессор генерирует сигнал xf(n) возбуждения, который воспроизводится громкоговорителем 101. Воспроизведенный аудиосигнал достигает микрофона 103 через акустический тракт, который обладает акустической импульсной переходной характеристикой (и соответствующей акустической передаточной функцией). Таким образом, микрофонный сигнал z(n), подаваемый в препроцессор 109, соответствует генерируемому сигналу xf(n) возбуждения, модифицированному в тракте сигнала, содержащем громкоговоритель 101, акустический тракт от громкоговорителя 101 до микрофона 103, и микрофон 103, т.е. он модифицирован комбинированным воздействием характеристик громкоговорителя 101, акустического тракта и микрофона 103.
Аналогично, эхокомпенсатор 105 выполняет компенсацию эхо в микрофонном сигнале z(n), основываясь на сигнале xf(n) возбуждения и, таким образом, выполняет оценку или моделирование комбинированного воздействия громкоговорителя 101, акустического тракта от громкоговорителя 101 до микрофона 103 и микрофона 103.
Препроцессор 109 выполнен с возможностью проведения настройки динамического диапазона для входного сигнала х(n) таким образом, что громкоговоритель 101 (включая, в частности, усилитель мощности и аудиопреобразователь) демонстрирует более линейные характеристики и во многих вариантах осуществления демонстрирует по существу линейные характеристики.
В препроцессоре 109 используются определенные конструкция и подход, что позволяет ему автоматически адаптировать обработку динамического диапазона в направлении оптимальной рабочей точки. Помимо этого, адаптация не требует каких-либо знаний или предположений о конкретных характеристиках передаточной функции от сигнала xf(n) возбуждения до микрофонного сигнала z(n). Напротив, препроцессор 109 может автоматически адаптировать обработку динамического диапазона к конкретным характеристикам громкоговорителя 101 (включая усилитель мощности и т.п.).
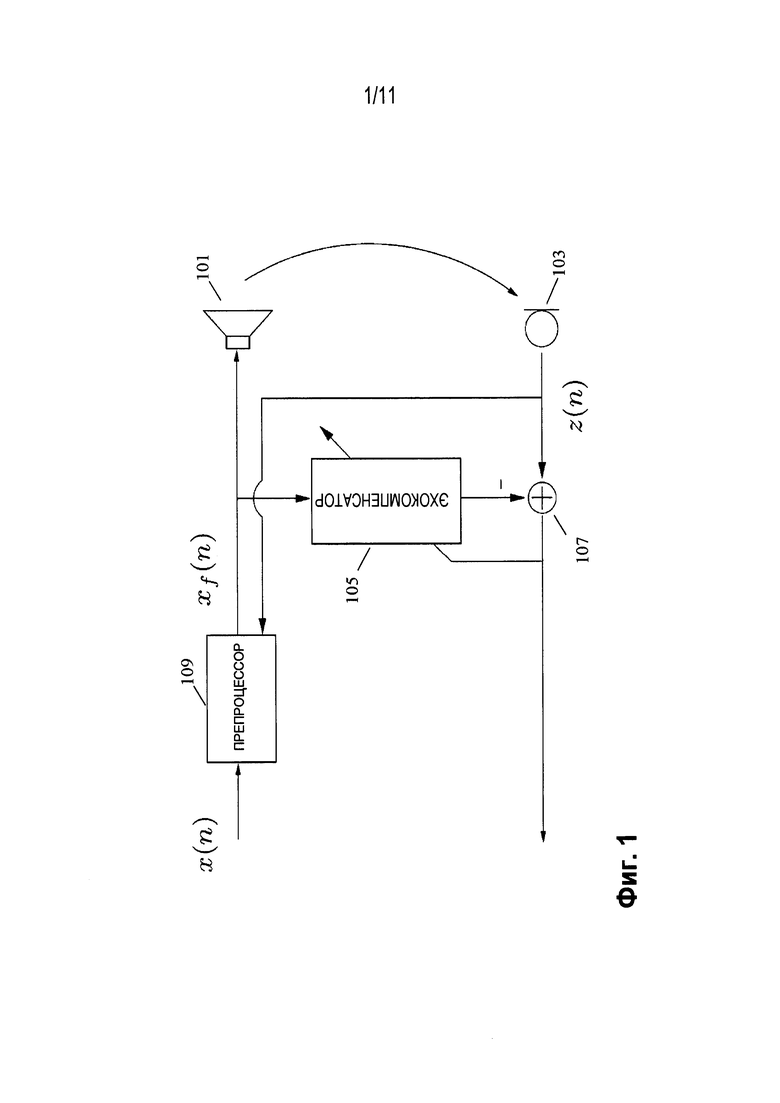
Фиг. 2 более подробно иллюстрирует препроцессор 109. Как показано, препроцессор 109 содержит три параллельные ветви или тракта. В одном тракте (верхний тракт на Фиг. 2) процессор 201 динамического диапазона применяет настройку динамического диапазона, обозначенную 
 к входному сигналу х(n) для генерации сигнала xf(n) возбуждения. Этот сигнал затем воспроизводится громкоговорителем 101. Громкоговоритель 101 воспроизводит звук с характеристиками, которые могут быть представлены функцией F{xf(n)}, которая, как правило, является нелинейной функцией, по меньшей мере для некоторых уровней сигнала. Таким образом, функция F{xf(n)} представляет комбинированное воздействие аудиопреобразователя, усилителя мощности и т.п. и может в частности отражать ограничение сигнала в усилителе мощности и нелинейности аудиопреобразователя.
к входному сигналу х(n) для генерации сигнала xf(n) возбуждения. Этот сигнал затем воспроизводится громкоговорителем 101. Громкоговоритель 101 воспроизводит звук с характеристиками, которые могут быть представлены функцией F{xf(n)}, которая, как правило, является нелинейной функцией, по меньшей мере для некоторых уровней сигнала. Таким образом, функция F{xf(n)} представляет комбинированное воздействие аудиопреобразователя, усилителя мощности и т.п. и может в частности отражать ограничение сигнала в усилителе мощности и нелинейности аудиопреобразователя.
Процессор 201 динамического диапазона применяет обработку для настройки динамического диапазона к входному сигналу, тем самым генерируя сигнал xf(n) возбуждения (выходной сигнал препроцессора 109), который затем воспроизводится громкоговорителем 101. Обработка для настройки динамического диапазона представляет собой обработку для адаптивной настройки динамического диапазона, которая зависит от набора параметров настройки динамического диапазона.
В обработке для настройки динамического диапазона может, в частности, использоваться функция, которая соотносит значение текущего входного сигнала со значением выходного сигнала. Например, для каждого значения входного сигнала х(n) обработка для настройки динамического диапазона может установить значение сигнала xf(n) возбуждения, как это определено адаптируемой функцией. Таким образом, адаптируемая функция определяет взаимосвязь между значениями входного сигнала и значениями выходного сигнала для процессора 201 динамического диапазона. Адаптируемая функция определяется набором параметров, называемых параметрами настройки динамического диапазона. Таким образом, эти параметры могут определять конкретную обработку для настройки динамического диапазона, которая применяется в данное время.
Таким образом, процессор 201 динамического диапазона может применять следующую операцию:

где параметры  настройки динамического диапазона определяют взаимосвязь между значениями сигнала и выходными значениями.
настройки динамического диапазона определяют взаимосвязь между значениями сигнала и выходными значениями.
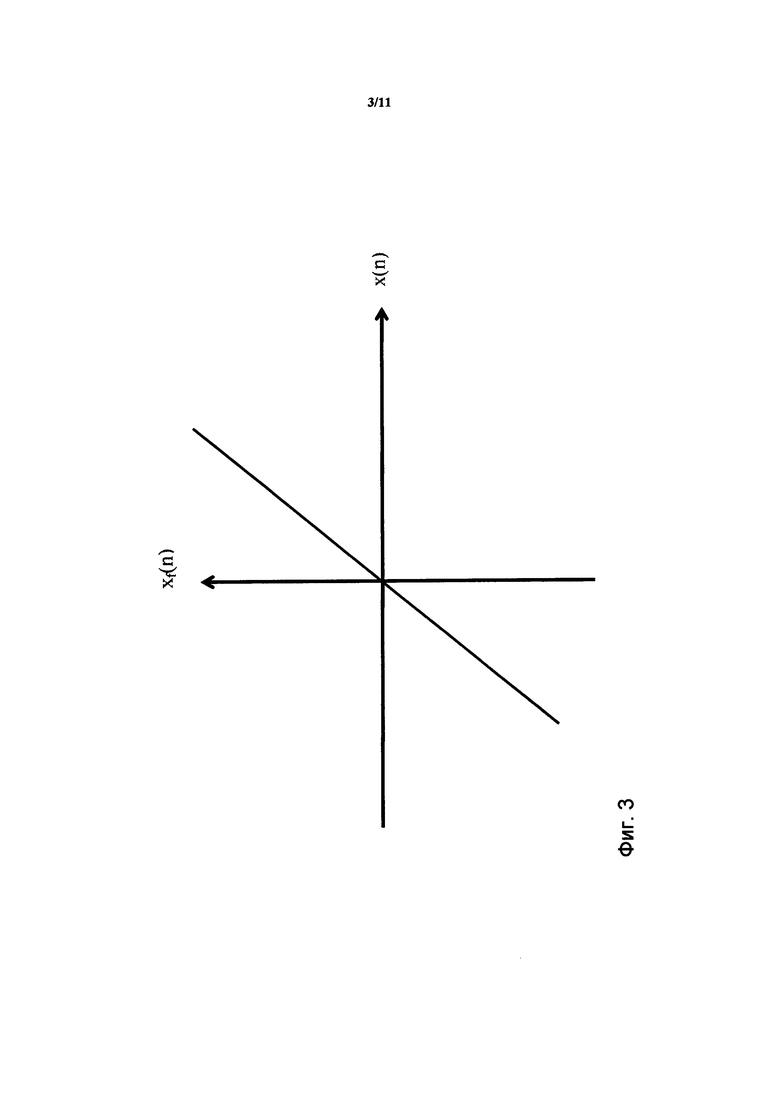
На Фиг. 3-6 проиллюстрированы конкретные примеры функций, которые могут быть применены.
В примере по Фиг. 3 используется обработка для линейной настройки динамического диапазона, в которой существует линейная взаимосвязь между значениями входного сигнала х(n) и значениями сигнала xf(n) возбуждения. В этом примере, параметры настройки динамического диапазона могут состоять из, например, одной скалярной величины, которая определяет градиент функции. Таким образом, для любого значения меньше одного обработка для настройки динамического диапазона будет уменьшать динамический диапазон, а для значения, равного единице, исходный сигнал будет пропускаться без изменений.
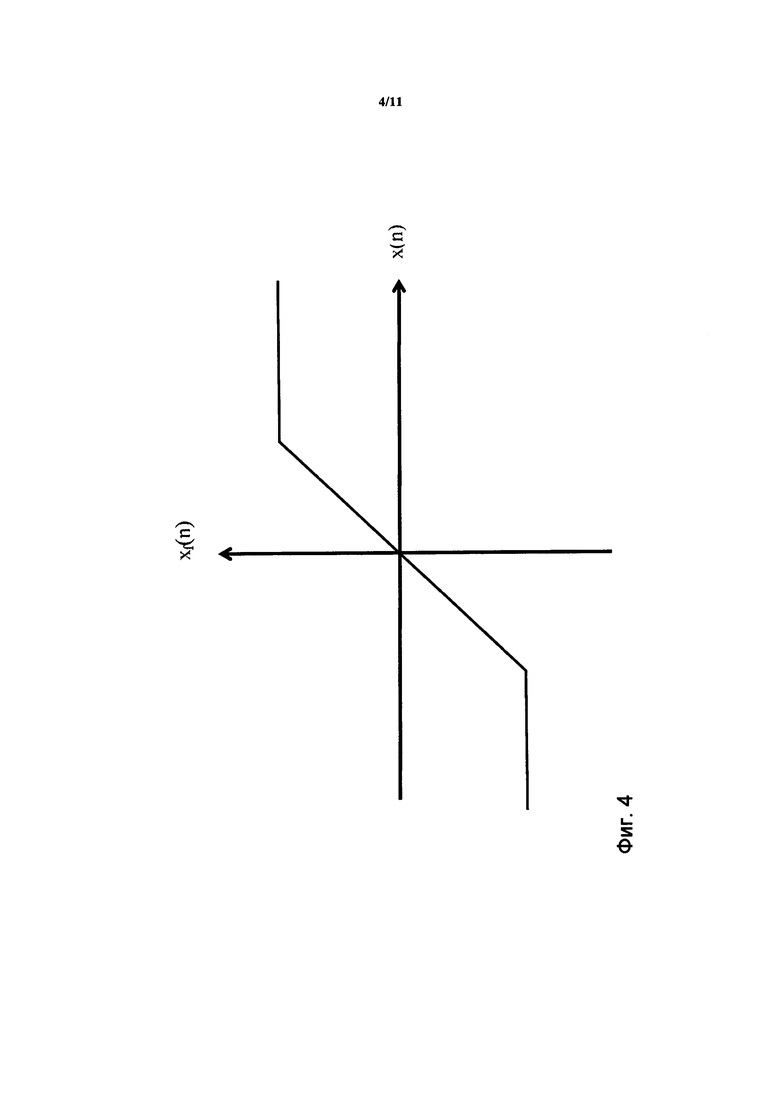
На примере по Фиг. 4 используется обработка для линейной настройки динамического диапазона, в которой существует линейная взаимосвязь между значениями входного сигнала х(n) и значениями сигнала xf(n) возбуждения для ограниченного диапазона значений входного сигнала х(n) (и, соответственно, значений сигнала xf(n) возбуждения). Однако, если значения входного сигнала х(n) (абсолютная величина) превышают заданное пороговое значение, (абсолютная величина) значения сигнала xf(n) возбуждения сохраняются постоянными. Таким образом, процессор 201 динамического диапазона в этом примере выполняет жесткое ограничение. В этом примере обработка для настройки динамического диапазона является линейной при условии, что уровни сигналов достаточно малы. Таким образом, пока уровни сигнала являются достаточно низкими, процессор 201 динамического диапазона не вносит каких-либо искажений. Однако для высоких значений может быть введено ограничение для ограничения динамического диапазона.
В данном примере параметры настройки динамического диапазона могут содержать набор значений, определяющих текущие уровни ограничения (которые могут быть симметричными и асимметричными), а также, возможно, градиент для линейной области.
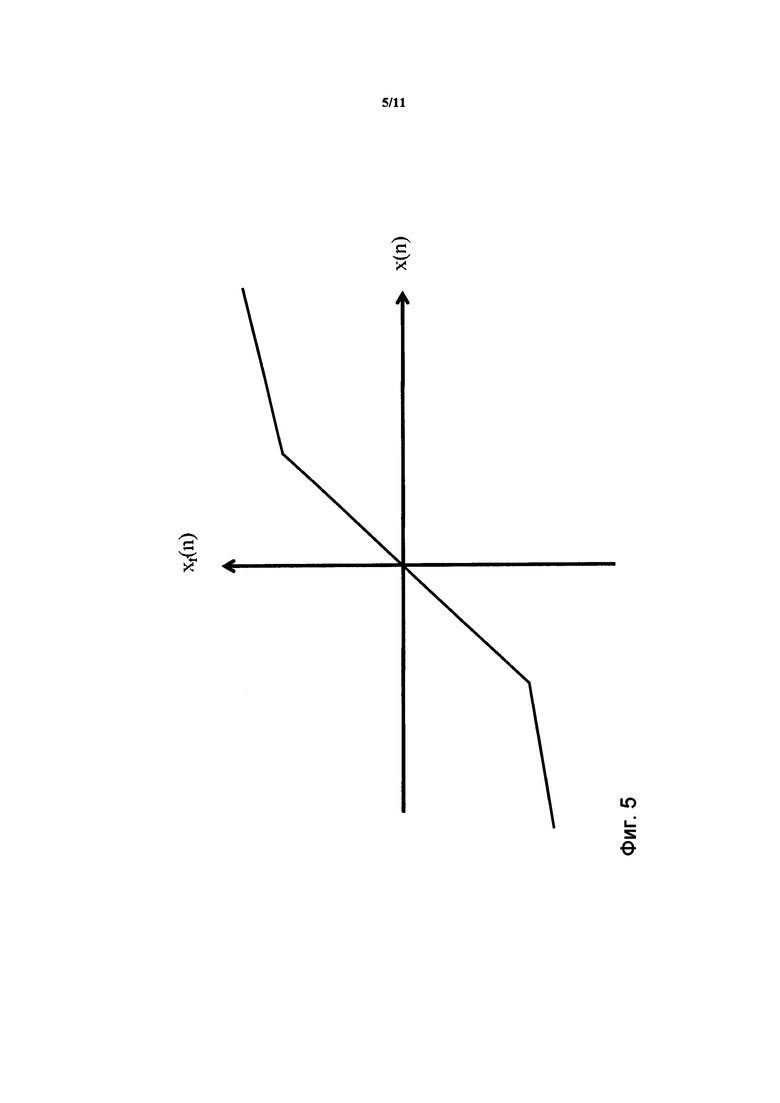
В некоторых вариантах осуществления ограничение может представлять собой мягкое ограничение, например, как проиллюстрировано на Фиг. 5, где функция определена тремя линейными участками с различными градиентами. В таком примере параметры настройки динамического диапазона могут определять градиенты для трех линейных участков и точки перехода между ними.
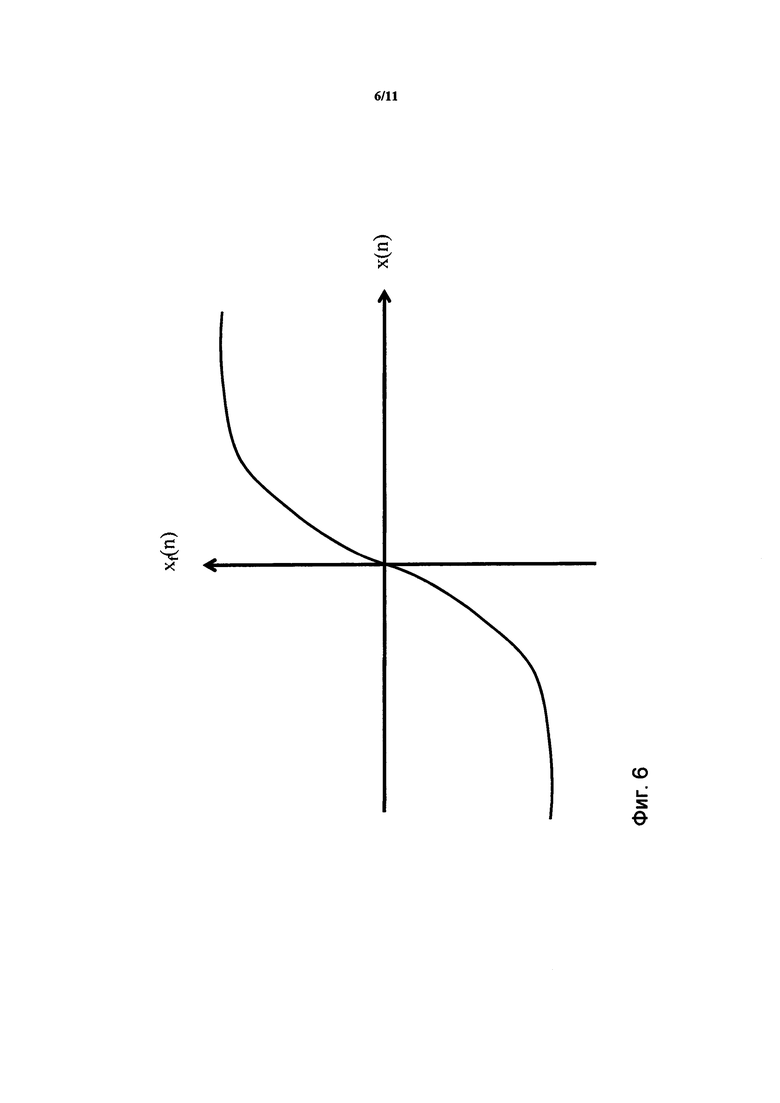
Следует отметить, что может быть использована любая подходящая функция, и что параметры настройки динамического диапазона могут определять любую подходящую функцию, например, функцию, показанную на Фиг. 6. Также следует отметить, что может быть использован любой подходящий способ представления функции набором параметров, включая представление в виде выборки. Например, для каждого возможного значения выборки входного сигнала х(n) параметр из набора параметров настройки динамического диапазона может определять одно значение сигнала xf(n) возбуждения. В другом примере функция может быть представлена полиномиальной функцией, причем параметры настройки динамического диапазона определяют значение каждого коэффициента.
Препроцессор 109 также содержит второй тракт (средний на Фиг. 2), который содержит линейный фильтр 203 компенсации эхо, соединенный со входом препроцессора 109 и принимающий входной сигнал х(n). Линейный фильтр 203 компенсации эхо фильтрует входной сигнал и генерирует первый компенсированный сигнал. Этот сигнал подается на первый адаптер, который на Фиг. 2 показан как первый разностный блок 205, который в данном конкретном примере представляет собой вычитатель. Первый разностный блок 205 также принимает микрофонный сигнал z(n) и затем генерирует первый разностный сигнал r(n), отражающий разницу между первым компенсированным сигналом и микрофонным сигналом. В данном конкретном примере первый компенсированный сигнал просто вычитается из микрофонного сигнала z(n).
Полученный таким образом первый разностный сигнал r(n) соответствует захваченному аудиосигналу после удаления оцененного линейного эха от входного сигнала х(n) к микрофонному сигналу z(n). Первый разностный сигнал r(n) используется для адаптации линейного фильтра 203 компенсации эхо. В частности, линейный фильтр 203 компенсации эхо может быть адаптирован для минимизации энергии сигнала первого разностного сигнала r(n).
Таким образом, второй тракт выполняет линейную компенсацию эхо между входным сигналом х(n) и микрофонным сигналом z(n). В этом тракте может использоваться обычная методика компенсации эхо, и линейный фильтр 203 компенсации эхо может быть адаптирован в соответствии с любым подходящим алгоритмом компенсации эхо, включая, например, алгоритм адаптации методом LMS.
Помимо этого, препроцессор 109 содержит третий тракт (нижний на Фиг. 2), который генерирует второй компенсированный сигнал путем проведения обработки для настройки динамического диапазона и применения второго фильтра компенсации эхо ко входному сигналу.
В примере по Фиг. 2 второй тракт включает в себя дополнительный процессор 207 динамического диапазона, который выполняет те же операции, что и процессор 201 динамического диапазона. Дополнительный процессор 207 динамического диапазона соединен с входом и принимает входной сигнал х(n) и генерирует копию сигнала xf(n) возбуждения. Копия сигнала xf(n) возбуждения подается во второй фильтр 209 компенсации эхо, который соответствует линейному фильтру 203 компенсации эхо и который генерирует второй компенсированный сигнал. Таким образом, второй компенсированный сигнал соответствует сигналу, который получается при применении компенсации эхо в линейном фильтре 203 компенсации эхо к сигналу xf(n) возбуждения, а не к входному сигналу х(n) (также как и для второго тракта).
Полученный второй компенсированный сигнал подается во второй адаптер, выполненный в виде второго разностного блока 211, который в данном конкретном примере представляет собой вычитатель. Второй разностный блок 211 также принимает микрофонный сигнал z(n) и затем генерирует второй разностный сигнал rf(n), отражающий разницу между вторым компенсированным сигналом и микрофонным сигналом. В данном конкретном примере второй компенсированный сигнал просто вычитается из микрофонного сигнала z(n).
Второй разностный сигнал rf(n) используется для адаптации дополнительного процессора 207 динамического диапазона и процессора 201 динамического диапазона. В частности, дополнительный процессор 207 динамического диапазона и процессор 201 динамического диапазона могут быть адаптированы для минимизации энергии второго разностного сигнала rf(n).
Таким образом, второй тракт выполняет линейную компенсацию эхо между сигналом xf(n) возбуждения и микрофонным сигналом z(n), используя фильтр компенсации эхо, который был определен для второго тракта, т.е. фильтр компенсации эхо, получаемый для линейной компенсации эхо между сигналом xf(n) возбуждения и микрофонным сигналом z(n). Однако получаемый остаточный сигнал не используется для обновления фильтра компенсации эхо, а используется для адаптации параметров настройки динамического диапазона дополнительного процессора 207 динамического диапазона и процессора 201 динамического диапазона.
Следовательно, второй разностный сигнал rf(n) используется для модификации параметров настройки динамического диапазона таким образом, что получается уменьшенный второй разностный сигнал rf(n).
Следует отметить, что параметры настройки динамического диапазона, используемые для дополнительного процессора 207 динамического диапазона и процессора 201 динамического диапазона, соответствуют друг другу и, действительно, во многих вариантах осуществления может использоваться только один процессор динамического диапазона. Например, второй фильтр 209 компенсации эхо может принимать сигнал xf(n) возбуждения непосредственно от процессора 201 динамического диапазона, и, аналогично, адаптация может выполняться непосредственно в отношении процесса 201 динамического диапазона.
Следует отметить, что для адаптации параметров настройки динамического диапазона на основе второго разностного сигнала rf(n) может быть использован любой подходящий алгоритм адаптации. Например, как будет более подробно описано ниже, может использоваться алгоритм LMS.
В примере по Фиг. 2, линейный фильтр 203 компенсации эхо и второй фильтр 209 компенсации эхо соответствуют друг другу в том, что второй фильтр 209 компенсации эхо определен параметрами фильтра, определенными для линейного фильтра 203 компенсации эхо, т.е. набор параметров фильтра, определенный для второго фильтра 209 компенсации эхо, выбирают в качестве набора параметров, определенных для линейного фильтра 203 компенсации эхо в процессе адаптации/компенсации эхо. Однако в любой заданный момент времени линейный фильтр 203 компенсации эхо и второй фильтр 209 компенсации эхо не обязательно должны быть идентичными. В частности, между фильтрами и параметрами фильтров, используемыми для двух фильтров, может присутствовать относительный временной сдвиг. Например, на Фиг. 2 линейный фильтр 203 компенсации эхо определяется параметрами фильтра, определяющими функцию  , хотя, в то же самое время, второй фильтр 209 компенсации эхо определяется параметрами, определяющими функцию
, хотя, в то же самое время, второй фильтр 209 компенсации эхо определяется параметрами, определяющими функцию  , т.е. параметры фильтра для второго фильтра 209 компенсации эхо включают в себя обновления значений, которые были определены для выборки n.
, т.е. параметры фильтра для второго фильтра 209 компенсации эхо включают в себя обновления значений, которые были определены для выборки n.
Структура и подход, используемые в препроцессоре 109, обеспечивают чрезвычайно эффективную работу, которая может обеспечить в конечном счете улучшенную работу системы по Фиг. 1. В частности, это может обеспечить возможность работы системы в рабочей точке, где воспроизведение звука является более линейным и, в частности, может снизить работу усилителя мощности или аудиопреобразователя в нелинейной области. Это может существенно улучшить линейную компенсацию эхо эхокомпенсатором 105.
Помимо этого, конструкция и взаимодействие различных трактов препроцессора 109 дает в результате систему, в которой взаимодействуют два процесса адаптации, которые, однако, являются относительно независимыми. В частности, сочетание работы трактов и процессов адаптации обеспечивает систему, которая не только уменьшает динамический диапазон, если он слишком большой, но и увеличивает его, если он слишком узкий. В частности, при уменьшении амплитуды сигнала xf(n) возбуждения линейность воспроизведения не уменьшается, а, напротив, обычно возрастает, т.е. чем уже динамический диапазон, тем, как правило, более линейным является воспроизведение. Таким образом, в рамках общепринятого подхода для уменьшения нелинейности воспроизведения просто уменьшают уровень сигнала в направлении нуля. Однако это, конечно, является нежелательным, поскольку приводит к прекращению воспроизведения звука. Напротив, в системе по Фиг. 1, если воспроизведение аудио является линейным, препроцессор 109 будет пытаться увеличить остаточный сигнал, т.е. он будет пытаться увеличить нелинейность. Таким образом, препроцессор 109 автоматически адаптирует обработку для настройки динамического диапазона в направлении увеличения динамического диапазона, если воспроизведение аудио является линейным, но адаптирует ее в направлении уменьшения динамического диапазона, если воспроизведение аудио является нелинейным. Таким образом, достигается смещение в сторону оптимальной рабочей точки.
Этот эффект, а также работа системы по Фиг. 1 и препроцессора по Фиг. 2 более подробно описываются ниже с привлечением соответствующего математического аппарата. В рассматриваемом примере влияние громкоговорителя 101/тракта воспроизведения (в частности, включая комбинированное влияние усилителя мощности и аудиопреобразователя) представлено нелинейной функцией F{xf(n)}. Полученный в результате сигнал эхо обозначается е(n), и он захватывается микрофоном 103. В дополнение к эхо микрофон также принимает возмущения от локального окружения такие, как постоянный фоновый шум и речь на ближнем конце линии связи, однако с целью упрощения дальнейшего анализа и описания эти компоненты сигнала далее рассматриваться не будут. Однако для того, чтобы отразить наличие этих компонентов, микрофонный сигнал обозначен z(n).
Предположим, что используется алгоритм LMS, и функция обновления для  дается выражением
дается выражением

где μh является параметром величины шага, который управляет скорость адаптации, и  определяет градиент квадрата сигнала ошибки r2(n) в отношении
определяет градиент квадрата сигнала ошибки r2(n) в отношении  и может быть выражена следующим образом:
и может быть выражена следующим образом:

где  и получаемое в результате уравнение обновления коэффициентов задается следующим выражением
и получаемое в результате уравнение обновления коэффициентов задается следующим выражением
 .
.
Микрофонный сигнал задается
где для целей настоящего анализа предполагается, что тракт акустического эхо не зависит от времени. Остаточный сигнал может быть выражен в терминах сигнала микрофона и оцененного линейного эхо

Замена z(n) в r(n) и раскрытие (3) дает

Пусть v(n) обозначает вектор  веса ошибки. Вычитание обоих частей (6) из h дает
веса ошибки. Вычитание обоих частей (6) из h дает

Сложение и вычитание  на правой стороне (7) и приведение подобных членов дает
на правой стороне (7) и приведение подобных членов дает

В дальнейшем предполагается, что х(n) представляет собой белый шум с нулевым средним и автокорреляционной матрицей
 , где
, где 
и I представляет собой единичную матрицу N×N. С учетом предполагаемого вида обеих частей (8),

где  и также предполагается, что она является диагональной матрицей. Дальнейшее упрощение дает следующее:
и также предполагается, что она является диагональной матрицей. Дальнейшее упрощение дает следующее:

Учитывая допущения, сделанные в отношении х(n), приведенное выше уравнение может анализироваться для одной выборки.
Пусть υ(n)=υk(n) и h=hk для 1≤k≤N, т.е.

В момент времени n+2,

В общем случае, для момента времени n+m:

Берем предел при m→∞,

где предполагалось, что  и, следовательно
и, следовательно 
Используя результат в (14), значение для стационарного состояния  может быть записано следующим образом
может быть записано следующим образом

Таким образом, это уравнение указывает на конечный результат процесса адаптации и в особенности на то, сходится система или нет.
Теперь предположим, что значение  остается фиксированным с момента времени (n-1) и далее в процессоре 201 динамического диапазона, и для отражения этого факта обозначим получающийся сигнал возбуждения как
остается фиксированным с момента времени (n-1) и далее в процессоре 201 динамического диапазона, и для отражения этого факта обозначим получающийся сигнал возбуждения как  . Тогда второй разностный сигнал rf(n) задается следующим выражением
. Тогда второй разностный сигнал rf(n) задается следующим выражением


в котором предполагается, что  аппроксимирует . Вычисляя градиент величины
аппроксимирует . Вычисляя градиент величины  в отношении
в отношении  ,
,
где  и зависит от f. Таким образом, в этом случае получаем следующее уравнение обновления для
и зависит от f. Таким образом, в этом случае получаем следующее уравнение обновления для  :
:

Таким образом, это уравнение может определять обновление адаптации для параметров настройки динамического диапазона и, следовательно, обработки для настройки динамического диапазона процессора 201 динамического диапазона. Следует отметить, что все используемые параметры могут быть вычислены, и что, в частности, u(n) может быть определен, если известна конкретная функция, которая используется для генерации сигнала xf(n) возбуждения из входного сигнала х(n).
В следующем разделе будет вычислен градиент  для двух различных ситуаций, а именно, для ситуации, где громкоговоритель 101 работает в линейной области, и где процессор 201 динамического диапазона не оказывает влияния, т.е. где параметрам настройки динамического диапазона присвоены такие значения, что обработка для настройки динамического диапазона по существу не ограничивает динамический диапазон в отношении линейного диапазона работы громкоговорителя 101.
для двух различных ситуаций, а именно, для ситуации, где громкоговоритель 101 работает в линейной области, и где процессор 201 динамического диапазона не оказывает влияния, т.е. где параметрам настройки динамического диапазона присвоены такие значения, что обработка для настройки динамического диапазона по существу не ограничивает динамический диапазон в отношении линейного диапазона работы громкоговорителя 101.
Общее выражение для градиента задается:

Сначала рассмотрим сценарий, где процессор 201 динамического диапазона не оказывает влияния, т.е. где  .
.
В этом случае выражение  в (19) равно нулю, поскольку F{xf(n)} не зависит от
в (19) равно нулю, поскольку F{xf(n)} не зависит от  . Это дает градиент:
. Это дает градиент:

что совпадает с результатом в (17) и, следовательно, минимизирует квадрат ошибки  .
.
Рассмотрим теперь второй сценарий, в котором тракт воспроизведения и, в частности, усилитель мощности и аудиопреобразователь, работают в линейной области. Это может быть, например, сценарием, в котором параметры f настройки динамического диапазона характеризуют жесткое ограничение, и уровень ограничения установлен гораздо ниже входного уровня насыщения аудиоусилителя.
В этом случае  и градиент задается
и градиент задается

Поскольку 0≤β≤1, градиент имеет противоположное направление по отношению к градиенту в (17). Таким образом, использование обновления в (18) в действительности приведет к увеличению сигнала ошибки. Таким образом, в этой ситуации система в действительности будет пытаться увеличить нелинейность воспроизведения и, тем самым, будет увеличивать динамический диапазон.
Таким образом, использование упомянутого подхода к обновлению в (18) в данной ситуации приводит к адаптации обработки для настройки динамического диапазона, которая приводит к увеличению сигнала ошибки (т.е. увеличению уровня второго разностного сигнала rf(n)). Таким образом, использование одного и того же критерия адаптации приводит в первом сценарии к тому, что значение параметров настройки динамического диапазона адаптируется для уменьшения сигнала ошибки и, следовательно, увеличения влияния обработки для настройки динамического диапазона. Однако во втором сценарии параметры настройки динамического диапазона адаптируются для увеличения сигнала ошибки и, следовательно, для уменьшения влияния обработки для настройки динамического диапазона.
Например, в случае обработки для настройки динамического диапазона, содержащей жесткое ограничение, система будет пытаться уменьшить сигнал ошибки, если система работает с высокой степенью нелинейности воспроизведения и, соответственно, уровень ограничения будет повышаться. Однако, если система работает с воспроизведением в линейной области, адаптация в препроцессоре 109 приведет к увеличению сигнала ошибки и, соответственно, к увеличению уровня ограничения до тех пор, пока  , т.е. до тех пор, пока воспроизведение не выйдет за пределы линейной обрасти.
, т.е. до тех пор, пока воспроизведение не выйдет за пределы линейной обрасти.
Рассмотрим это более подробно. Допустим, что параметры настройки динамического диапазона содержат только одно значение, указывающее порог/уровень ограничения:
где 
При этом верны следующие соотношения:


Более того, пусть физическая нелинейность (усилитель-громкоговоритель), представленная функцией F, также представляет собой функцию жесткого ограничения. Две ситуации, рассмотренные выше, переходят в следующее:
В первом случае выражение для обновления (18) может иметь следующий вид:

Поскольку  и 0≤β≤1, выражение для обновления будет отрицательным если
и 0≤β≤1, выражение для обновления будет отрицательным если 
Однако, во втором случае выражение для обновления имеет следующий вид:

Поскольку  и 0≤β≤1, выражение для обновления в данном случае является положительным.
и 0≤β≤1, выражение для обновления в данном случае является положительным.
Следует отметить, что максимальный динамический диапазон, допускаемый обработкой для настройки динамического диапазона, может быть ограничен для предотвращения случая, когда u(n)=0 для всех xf(n), поскольку это приведет к остановке обновления и отслеживания параметров  процессора динамического диапазона.
процессора динамического диапазона.
Таким образом, можно видеть, что из каждой пограничной ситуации система будет смещаться в направлении подходящего уровня ограничения.
Как уже указывалось выше, обработка для настройки динамического диапазона в процессоре 201 динамического диапазона может в некоторых вариантах осуществления быть линейной. Однако во многих вариантах осуществления и сценариях обработка для настройки динамического диапазона может быть нелинейной и, в частности, содержать жесткое или мягкое ограничение сигнала. Использование обработки для нелинейной настройки динамического диапазона может обеспечить во многих сценариях снижение сложности выполняемых операций. Более того, это может, как правило, обеспечить достижение лучшего баланса между различными видами воздействия на воспроизводимое аудио. Например, это может обеспечить достижение лучшего компромисса между искажениями и уровнем громкости, когда усилитель мощности и/или аудиопреобразователь работают в нелинейной области. Действительно, в таких ситуациях воспроизводимое аудио может быть немного искажено и уровень громкости может быть немного уменьшен, что, как правило, лучше, чем простое уменьшение уровня громкости до уровня, при котором отсутствуют искажения. Помимо этого, благодаря искажениям, вносимым препроцессором 109 (например, ограничению), усилитель мощности и аудиопреобразователь работают по существу в линейной области, и эхокомпенсатор будет исключительно хорошо выполнять свои функции и будет способен уменьшить эхо до приемлемого уровня. Таким образом, в обычных системах увеличение уровня громкости приводит к возникновению нелинейностей и искажений, вносимых усилителем мощности/аудиопреобразователем, что приводит к неудовлетворительной компенсации эхо. Напротив, описанный выше подход может обеспечить внесение нелинейностей в препроцессоре 109, обеспечивая при этом возможность усилителю мощности/аудиопреобразователю работать в линейной области, что обеспечивает эффективную компенсацию эхо. Хотя препроцессор 109 может в этом случае вносить некоторые искажения, эти искажения, как правило, не хуже тех, которые вносились бы системой воспроизведения и, более того, это гарантирует, что нелинейность/искажение не окажут негативного воздействия на компенсацию эхо. Таким образом, эффективная компенсация эхо может быть обеспечена, даже если в системе возникает искажение.
В некоторых вариантах осуществления препроцессор 109 может обеспечивать переменное усиление, что позволяет масштабировать входной сигнал х(n) до применения параметров настройки динамического диапазона. Масштабирование входного сигнала в таких вариантах осуществления может быть адаптировано, основываясь на измерении уровня входного сигнала х(n) и на одном или более из параметров настройки динамического диапазона.
В частности, в некоторых вариантах осуществления процессор 201 динамического диапазона может быть выполнен с возможностью выполнения ограничения входного сигнала, причем порог для ограничения определяется параметром ограничения в параметрах настройки динамического диапазона. В таких случаях препроцессор 109 может быть выполнен с возможностью масштабирования входного сигнала до его ограничения. Масштабирование может зависеть от текущего уровня сигнала (например, от пикового или среднего значения уровня амплитуды на относительно коротком временном интервале, например, примерно от 20 мс до 300 мс) и от текущего уровня ограничения. Например, если уровень сигнала немного выше, чем текущий уровень ограничения, усиление может поддерживаться на уровне единицы, что обеспечивает относительно небольшие искажения и относительно высокий уровень громкости. Однако, если уровень сигнала существенно превышает уровень ограничения, переменное усиление может быть установлено ниже единицы. Это может уменьшить громкость, но при этом также уменьшатся искажения. Таким образом, при помощи адаптации переменного усиления может быть обеспечен улучшенный баланс между уровнем громкости и искажениями воспроизводимого звука.
В некоторых вариантах осуществления переменное усиление устанавливают таким образом, чтобы обеспечить постоянный уровень ограничения по отношению к измененному среднему максимальному пиковому уровню входного сигнала и текущему уровню ограничения. Такое масштабирование входного сигнала до настройки динамического диапазона может также гарантировать, что обновление параметров настройки динамического диапазона не будет прекращено, если u(n) будет постоянно иметь нулевое значение.
Еще одно преимущество рассматриваемой системы заключается в том, что она не требует знания характеристик тракта воспроизведения. В частности, она не пытается моделировать или оценивать тракт воспроизведения, а пытается управлять сигналом xf(n) возбуждения таким образом, чтобы сделать воспроизведение более линейным. Это достигается автоматически без знания или оценки конкретного нелинейного поведения, например, усилителя мощности или аудиопреобразователя. Соответственно, препроцессор 109 может быть использован с любым воспроизводящим оборудованием и также может быть добавлен к существующим системам воспроизведения.
Одно из преимуществ рассматриваемой системы заключается в том, что препроцессор 109 может быть независимым от компенсации эхо в сигнале, передаваемом на удаленный конец линии связи: действительно, в примере по Фиг. 1 препроцессор 109 не зависит от эхокомпенсатора 105; и, наоборот, в том, что внутренние сигналы препроцессора 109 не используются эхокомпенсатором 105 и сигналы эхокомпенсатора 105 не используются препроцессором 109.
В частности, эхокомпенсатор 105 выполняет компенсацию эхо, основываясь только на сигнале возбуждения для громкоговорителя 101. Он не использует ни входные, ни внутренние сигналы препроцессора 109 и, в частности, не использует входной сигнал х(n), первый компенсированный сигнал или второй компенсированный сигнал. Эхокомпенсатор 105 также не требует учета препроцессора 109. Напротив, эхокомпенсатор 105 может использовать обычный подход линейной компенсации эхо. Таким образом, преимущество рассматриваемой системы заключается в том, что она может обеспечить улучшенный подход к компенсации эхо путем сочетания и синергии между препроцессором 109 и эхокомпенсатором 105, при этом оба устройства могут разрабатываться независимо.
Следует также отметить, что система с препроцессором 109 может быть использована с многомикрофонной системой, где входные сигналы препроцессора 109 содержат входной сигнал х(n) и один из микрофонных сигналов из многомикрофонной системы. Этот микрофон может быть выбран, например, основываясь на максимальной связи с громкоговорителем 101.
Действительно, значительное преимущество рассматриваемого подхода заключается в том, что препроцессор 109 может быть введен в уже существующие системы (линейной) компенсации эхо для обеспечения улучшенной компенсации эхо.
Ниже описаны экспериментальные результаты для конкретного варианта осуществления.
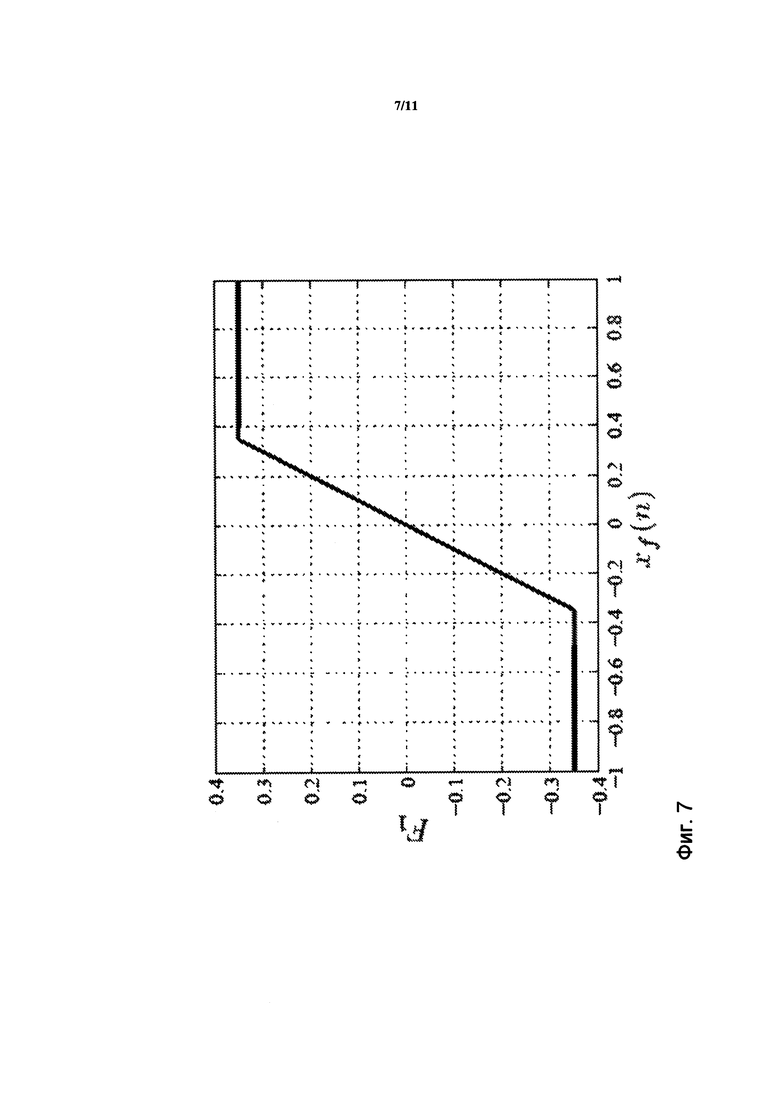
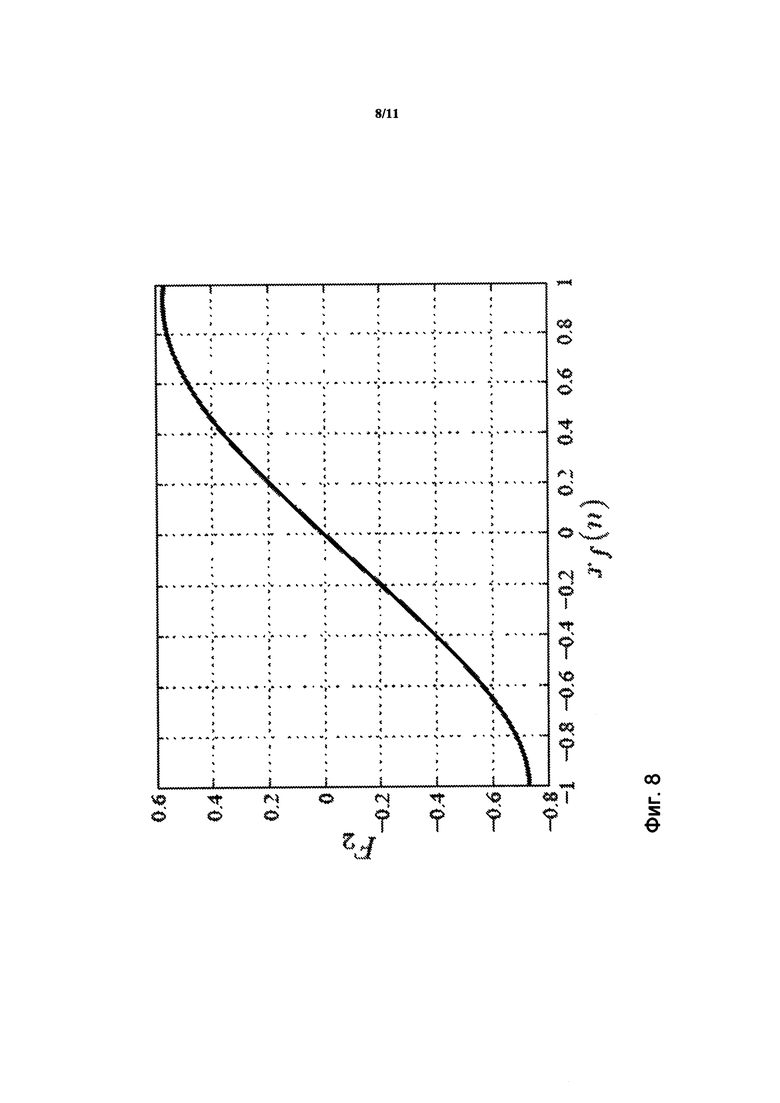
В этом примере для моделирования физической системы F{xf(n)} используются две основные функции:
1. Жесткое ограничение для моделирования насыщения характеристик аудиоусилителя:
где а имеет значение 0,25.
2. Модель степенного фильтра нелинейности громкоговорителя:

Эти функции проиллюстрированы на Фиг. 7 и 8.
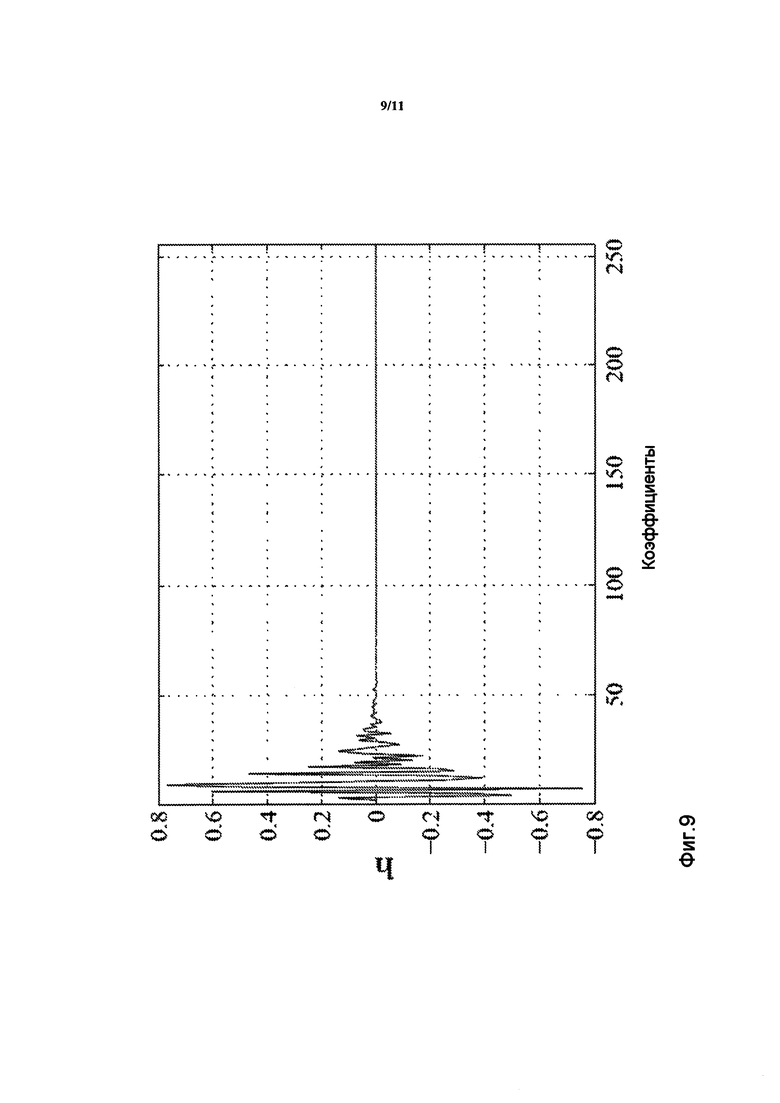
Функция f ограничена до функции жесткого ограничения с адаптивным порогом, поскольку функции такого типа эффективны и легко реализуемы. Помимо этого, как будет показано ниже, ее можно легко использовать для работы с обеими физическими системами F1 и F2. Предполагается, что тракт h акустического эхо является линейным, как показано на Фиг. 9.
В качестве входного сигнала х(n) используется сигнал искусственного мужского голоса продолжительностью приблизительно 11 секунд и дискретизированный с частотой 16 кГц. Динамический диапазон составляет от -0,75 до 0,5, где +1 и -1 представляют, соответственно, максимальную и минимальную амплитуду. Сигнал повторяется несколько раз для наблюдения производительности оцениваемой системы в стационарном режиме.
Для моделирования прямого тракта акустической импульсной переходной характеристики h используется адаптивный фильтр с 80 отводами, реализующий алгоритм NLMS, при этом начальное значение  было выставлено в ноль. В случае
было выставлено в ноль. В случае  выражение для обновления нормализуется сглаженной степенной оценкой для х(n), в то время как в случае обновления
выражение для обновления нормализуется сглаженной степенной оценкой для х(n), в то время как в случае обновления  нормализация осуществляется с использованием значения
нормализация осуществляется с использованием значения  . Значения величины шага составляют, соответственно, μh=0,01 и μа=0,01. Начальное значение
. Значения величины шага составляют, соответственно, μh=0,01 и μа=0,01. Начальное значение  установлено равным 0,1. Нижняя и верхняя границы 0,1 и 0,95 для значения накладываются после каждого обновления. Верхняя граница 0,95 может использоваться с тем, чтобы гарантировать, что обновление
установлено равным 0,1. Нижняя и верхняя границы 0,1 и 0,95 для значения накладываются после каждого обновления. Верхняя граница 0,95 может использоваться с тем, чтобы гарантировать, что обновление  не прекратится для более высоких значений, когда u(n) может иметь нулевое значение.
не прекратится для более высоких значений, когда u(n) может иметь нулевое значение.
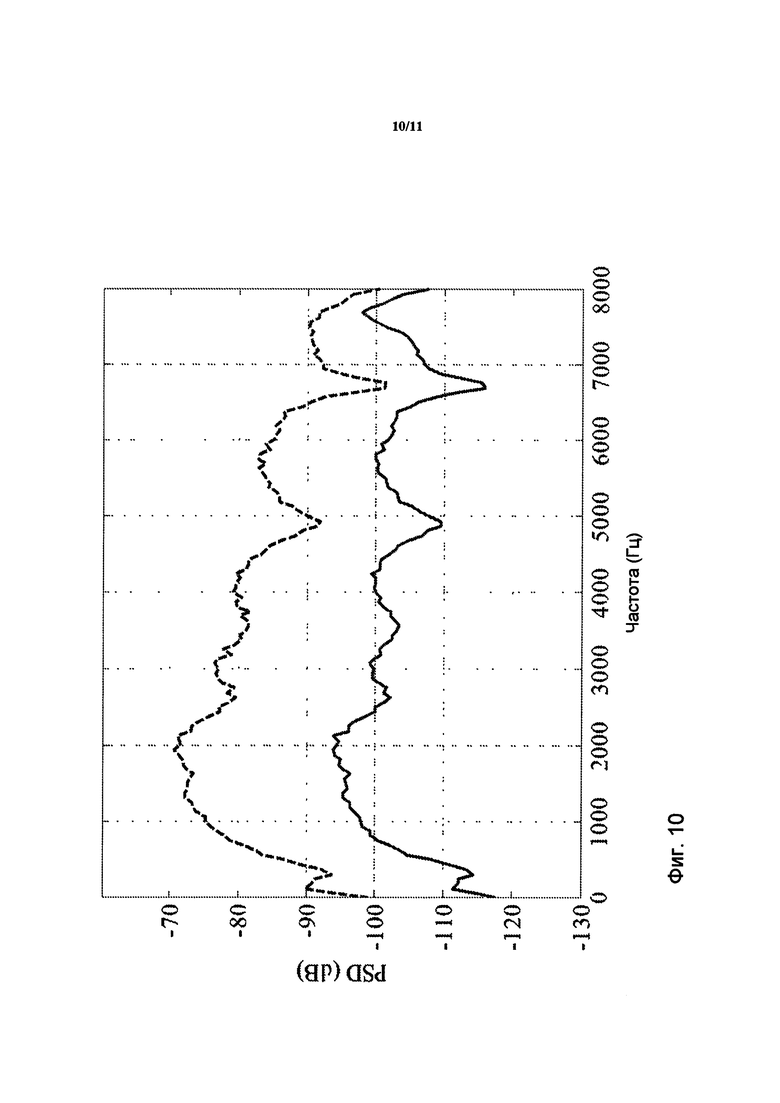
Компенсация эхо оценивается для эхокомпенсатора, использующего простой адаптивный фильтр длинной 128 отводов. Используемая мера производительности представляет собой спектральную плотность мощности (PSD) остаточного сигнала эхо.
На Фиг. 10 проиллюстрированы результаты для первой модели F1, т.е. для усилителя мощности с ограничением, а на Фиг. 11 проиллюстрированы результаты для второй модели F2, т.е. для нелинейности громкоговорителя. Пунктирной линией показана PSD сигнала ошибки в случае отсутствия препроцессора 109, и сплошной линией показана PSD сигнала ошибки в случае наличия препроцессора 109.
Как можно видеть, в обеих ситуациях достигается существенное увеличение производительности. Таким образом, как продемонстрировано экспериментами, препроцессор, использующий функцию жесткого ограничения, может обеспечить дешевый подход к уменьшению количества нелинейных искажений, вносимых громкоговорителем, тем самым улучшая эффективность компенсации акустического эхо. Дополнительное преимущество предлагаемого подхода заключается в том, что он не зависит от физической нелинейной модели, что демонстрируется улучшением производительности для двух различных моделей нелинейности (модели ограничения и степенного фильтра). Действительно, во многих вариантах осуществления часто может обеспечиваться улучшение эффективности компенсации эхо, превышающее 5-20 дБ.
Следует отметить, что в приведенном выше описании для ясности изложения описаны варианты осуществления, использующие различные функциональные схемы, блоки и процессоры. Однако, следует отметить, что может быть использовано любое подходящее распределение функций между функциональными схемами, блоками и процессорами. Например, функции, для которых показано, что они выполняются отдельными процессорами или контроллерами, могут выполняться одним и тем же процессором или контроллером. Таким образом, указания на конкретные функциональные блоки или схемы следует рассматривать только как указания на подходящие средства, обеспечивающие описываемые функции, а не в качестве указания на жестко заданную логическую или физическую структуру или организацию.
Изобретение может быть осуществлено в любом подходящем виде, включая аппаратные средства, программные средства, встроенные программные средства и любую их комбинацию. Изобретение также может быть осуществлено, по меньшей мере, частично в виде компьютерных программных средств, выполняемых на одном или более процессорах данных и/или цифровых сигнальных процессорах. Элементы и компоненты варианта осуществления изобретения могут быть осуществлены физически, функционально и логически любым подходящим способом. Действительно, функция может быть реализована в одном блоке, во множестве блоков или как часть других функциональных блоков. Как таковое, изобретение может быть осуществлено в одном блоке или может быть физически и функционально распределено между различными блоками, схемами и процессорами.
Хотя настоящее изобретение было описано в контексте определенных вариантов осуществления, его не следует ограничивать конкретными формами, раскрытыми в настоящем описании. Напротив, объем настоящего изобретения ограничен только прилагаемой формулой изобретения. Помимо этого, хотя отдельные признаки могут быть описаны в контексте конкретных вариантов осуществления, специалисту будет понятно, что различные признаки описанных вариантов осуществления могут комбинироваться в соответствии с настоящим изобретением. Содержащийся в формуле изобретения термин не исключает наличия других элементов или этапов.
Помимо этого, множество средств, элементов, схем или этапов способов, хотя они перечислены индивидуально, могут быть реализованы, например, одной схемой, блоком или процессором. Помимо этого, хотя конкретные признаки могут быть включены в различные пункты формулы изобретения, также возможно их сочетание, и включение в различные пункты формулы изобретения не подразумевает того, что сочетание признаков неосуществимо и/или не обеспечивает никаких преимуществ. Помимо этого, включение признака в одну категорию пунктов формулы изобретения не подразумевает, что этот признак ограничен только этой категорией, напротив, это указывает на то, что признак в равной степени может использоваться, в случае необходимости, в пунктах формулы изобретения, относящихся к другим категориям. Помимо этого, порядок, в котором признаки упоминаются в формуле изобретения, не подразумевает какого-либо определенного порядка, в котором данные признаки должны рассматриваться и, в частности, порядок отдельных этапов в пункте формулы изобретения, относящемся к способу, не подразумевает, что эти этапы должны выполняться в упомянутом порядке. Напротив, этапы могут выполняться в любом подходящем порядке. Помимо этого, использование форм единственного числа не исключает наличия множественности. Таким образом, указание на единственность, выражения "первый", "второй" и т.п. не исключают множественности. Ссылочные позиции в формуле изобретения представлены исключительно в качестве поясняющих примеров, и их не следует рассматривать как ограничивающие каким-либо образом объем формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОКАНАЛЬНОЕ АКУСТИЧЕСКОЕ ЭХОПОДАВЛЕНИЕ | 2010 |
|
RU2546717C2 |
| СПОСОБ И УСТРОЙСТВО ОЦЕНКИ АУДИОПОМЕХИ | 2013 |
|
RU2651616C2 |
| СИСТЕМА И СПОСОБ ДЛЯ КОМПЕНСАЦИИ БЕЗЫНЕРЦИОННОГО НЕЛИНЕЙНОГО ИСКАЖЕНИЯ В АУДИОПРЕОБРАЗОВАТЕЛЕ | 2007 |
|
RU2440692C2 |
| ПОДАВЛЕНИЕ АКУСТИЧЕСКОГО ЭХА НА ОСНОВЕ ШУМОВОЙ СРЕДЫ | 2008 |
|
RU2464723C2 |
| УПРАВЛЕНИЕ АКУСТИЧЕСКОЙ ЭХОКОМПЕНСАЦИЕЙ ДЛЯ РАСПРЕДЕЛЕННЫХ АУДИОУСТРОЙСТВ | 2020 |
|
RU2818982C2 |
| УСТРОЙСТВО И СПОСОБ РАСЧЕТА КОЭФФИЦИЕНТОВ ФИЛЬТРА ЭХОПОДАВЛЕНИЯ | 2009 |
|
RU2485607C2 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ КОНТРОЛЯ ГРОМКОГОВОРИТЕЛЕЙ КИНОТЕАТРА И КОМПЕНСАЦИИ ПРОБЛЕМ КАЧЕСТВА | 2010 |
|
RU2570217C2 |
| СПОСОБ КОМПЕНСАЦИИ ПОТЕРИ СЛУХА В ТЕЛЕФОННОЙ СИСТЕМЕ И В МОБИЛЬНОМ ТЕЛЕФОННОМ АППАРАТЕ | 2013 |
|
RU2568281C2 |
| УСТРОЙСТВО И СПОСОБ РАСЧЕТА ПАРАМЕТРОВ УПРАВЛЕНИЯ ФИЛЬТРА ЭХОПОДАВЛЕНИЯ И УСТРОЙСТВО И СПОСОБ РАСЧЕТА ВЕЛИЧИНЫ ЗАДЕРЖКИ | 2009 |
|
RU2495506C2 |
| БЛОК ПОДАВЛЕНИЯ АКУСТИЧЕСКОГО ЭХА | 2020 |
|
RU2801125C1 |
Изобретение относится к аудиоустройству. Техническим результатом является улучшенная компенсация эхо. Аудиоустройство содержит схему (201) для осуществления обработки для настройки динамического диапазона в отношении входного сигнала для генерации выходного сигнала для воспроизведения громкоговорителем (101). Обработка для настройки динамического диапазона зависит от набора параметров настройки динамического диапазона. Первый линейный фильтр (203) компенсации эхо генерирует первый компенсированный сигнал из входного аудиосигнала, и первый адаптер (205) определяет набор параметров фильтра для первого линейного фильтра (203) компенсации эхо в ответ на первый компенсированный сигнал и микрофонный сигнал. Аудиосхема (207, 209) генерирует второй компенсированный сигнал путем применения обработки для настройки динамического диапазона и применения второго фильтра (209) компенсации эхо в отношении входного сигнала, причем второй фильтр (209) компенсации эхо соответствует первому фильтру (203) компенсации эхо. Второй адаптер (211) определяет набор параметров настройки динамического диапазона в ответ на второй компенсированный сигнал и микрофонный сигнал. 3 н. и 11 з.п. ф-лы, 11 ил.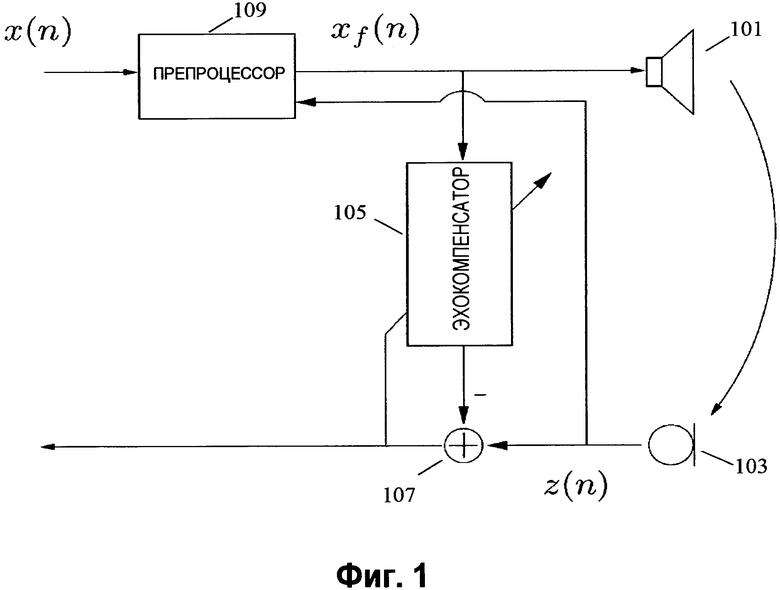
1. Аудиоустройство, содержащее:
схему (201) для применения обработки для настройки динамического диапазона в отношении входного сигнала для генерации выходного сигнала для воспроизведения громкоговорителем (101), причем обработка для настройки динамического диапазона зависит от набора параметров настройки динамического диапазона;
первый линейный фильтр (203) компенсации эхо для генерации первого компенсированного сигнала из входного сигнала;
первый адаптер (205) для определения набора параметров фильтра для первого линейного фильтра компенсации эхо в ответ на первый компенсированный сигнал и микрофонный сигнал;
схему (207, 209) для генерации второго компенсированного сигнала путем применения обработки для настройки динамического диапазона и применения второго фильтра (209) компенсации эхо в отношении входного сигнала, причем второй фильтр (209) компенсации эхо соответствует первому фильтру (203) компенсации эхо;
второй адаптер (211) для определения набора параметров настройки динамического диапазона в ответ на второй компенсированный сигнал и микрофонный сигнал.
2. Аудиоустройство по п.1, в котором обработка для настройки динамического диапазона представляет собой обработку для нелинейной настройки динамического диапазона.
3. Аудиоустройство по п.2, дополнительно содержащее усилитель с изменяемым коэффициентом усиления, выполненный с возможностью масштабирования входного сигнала в ответ на оценку уровня сигнала входного сигнала, и по меньшей мере один параметр из набора параметров настройки динамического диапазона.
4. Аудиоустройство по п.3, в котором упомянутый по меньшей мере один параметр представляет собой параметр ограничения уровня.
5. Аудиоустройство по п.2, в котором обработка для нелинейной настройки динамического диапазона содержит ограничение сигнала.
6. Аудиоустройство по п.5, в котором ограничение сигнала представляет собой жесткое ограничение сигнала.
7. Аудиоустройство по п.1, дополнительно содержащее эхокомпенсатор (105), выполненный с возможностью компенсации эхо в отношении микрофонного сигнала на основании выходного сигнала.
8. Аудиоустройство по п.7, в котором эхокомпенсатор (105) представляет собой линейный эхокомпенсатор.
9. Аудиоустройство по п.7, в котором эхокомпенсатор (105) не зависит от первого компенсированного сигнала, второго компенсированного сигнала и входного сигнала.
10. Аудиоустройство по п.1, в котором первый адаптер (205) выполнен с возможностью генерации разностного сигнала между первым компенсированным сигналом и микрофонным сигналом, и модификации набора параметров фильтра для уменьшения разностного сигнала.
11. Аудиоустройство по п.1, в котором второй адаптер (211) выполнен с возможностью генерации разностного сигнала между вторым компенсированным сигналом и микрофонным сигналом, и модификации набора параметров настройки динамического диапазона для уменьшения разностного сигнала.
12. Аудиоустройство по п.1, в котором параметры настройки динамического диапазона определяют функцию, cоотносящую значения входного сигнала со значениями выходного сигнала.
13. Способ аудиообработки, содержащий:
применение обработки для настройки динамического диапазона в отношении входного сигнала для генерации выходного сигнала для его воспроизведения громкоговорителем, причем нелинейная обработка зависит от набора параметров настройки динамического диапазона;
генерацию первого компенсированного сигнала из входного сигнала первым линейным фильтром (203) компенсации эхо;
определение набора параметров фильтра для первого линейного фильтра (203) компенсации эхо в ответ на первый компенсированный сигнал и микрофонный сигнал;
генерацию второго компенсированного сигнала путем применения обработки для настройки динамического диапазона и применения второго фильтра (209) компенсации эхо в отношении входного сигнала, причем второй фильтр (209) компенсации эхо соответствует первому фильтру (203) компенсации эхо; и
определение набора параметров настройки динамического диапазона в ответ на второй компенсированный сигнал и микрофонный сигнал.
14. Компьютерно-читаемый носитель, содержащий компьютерную программу, выполненную с возможностью исполнения всех этапов по п. 13 при выполнении упомянутой программы на компьютере.
| US 2011093102 A1, 21.04.2011 | |||
| EP 1672803 A2, 21.06.2006 | |||
| US 2008247536 A1, 09.10.2008 | |||
| JP 2003274481 A, 26.09.2003 | |||
| US 2009214048 A1, 27.08.2009 | |||
| Приспособление к болторезному станку для сверления хвостовика буферного стержня | 1928 |
|
SU16497A1 |
| WO 2012158163 A1, 22.11.2012 | |||
| УЛУЧШЕННАЯ СИСТЕМА И СПОСОБ РЕАЛИЗАЦИИ ЭХОПОДАВИТЕЛЯ | 2001 |
|
RU2277301C2 |
| СИСТЕМА И СПОСОБ ИСКУССТВЕННОЙ РЕВЕРБЕРАЦИИ (ВАРИАНТЫ) | 2005 |
|
RU2403674C2 |

