Настоящее изобретение относится к способу управления работой тормозной системы, прежде всего тормозной системы автомобиля, имеющей по меньшей мере один гидравлический контур с предусмотренными в нем гидронасосом и по меньшей мере двумя колесными тормозными механизмами, каждый из которых снабжен по меньшей мере одним управляемым впускным клапаном, при этом для оказания автоматического тормозного воздействия создают гидронасосом давление в гидравлическом контуре и открывают впускной клапан первого из колесных тормозных механизмов, а впускной клапан второго колесного тормозного механизма в том же гидравлическом контуре закрывают и контролируют при этом тормозную систему на намерение водителя произвести торможение.
Изобретение относится далее к соответствующей тормозной системе для автомобиля, имеющей по меньшей мере один гидравлический контур с предусмотренными в нем гидронасосом и по меньшей мере двумя колесными тормозными механизмами, каждый из которых снабжен по меньшей мере одним управляемым впускным клапаном, и средства для контроля тормозной системы на намерение водителя произвести торможение.
Уровень техники
Способы и тормозные системы указанного в начале описания типа известны из уровня техники. Современные автомобили обычно оснащаются тормозными системами, которые оказывают автоматическое тормозное воздействие для повышения устойчивости автомобиля. Подобные тормозные системы прежде всего стали известны под названием ESP-систем (электронные системы стабилизации курсовой устойчивости или иначе электронные системы динамической стабилизации), которые целенаправленно затормаживают одно или несколько колес автомобиля соответствующими колесными тормозными механизмами путем создания в них тормозного давления во избежание, например, срыва автомобиля в занос или потери им устойчивости. Обычно с этой целью тормозные воздействия для стабилизации автомобиля оказываются на тормозные механизмы колес обеих - передней и задней - осей. При этом в одном гидравлическом контуре принято располагать два колесных тормозных механизма, например тормозной механизм одного колеса передней оси и тормозной механизм одного колеса задней оси. Обычно путем автоматического тормозного воздействия для повышения устойчивости автомобиля необходимо задействовать только один из колесных тормозных механизмов. Поэтому впускной клапан того колесного тормозного механизма, который не должен задействоваться, закрывают, вследствие чего в этот колесный тормозной механизм не подается давление, создаваемое гидронасосом. При этом обычно предусмотрен соответствующий гидравлический датчик давления на входе, который регистрирует давление, создаваемое в тормозной системе водителем. В отсутствие такого датчика давления на входе невозможно было бы определить, имеет ли водитель независимо от автоматического тормозного воздействия намерение произвести торможение, которое должно было бы накладываться на автоматическое тормозное воздействие.
Раскрытие изобретения
Преимущество предлагаемого в изобретении способа, а также предлагаемой в изобретении тормозной системы заключается в том, что намерение водителя произвести торможение выявляют даже в отсутствие гидравлического датчика давления, благодаря чему возможно наложение намерения водителя произвести торможение на автоматическое тормозное воздействие. С этой целью согласно предлагаемому в изобретении способу для выявления намерения водителя произвести торможение регистрируют первое поведение по меньшей мере одного колеса, к которому относится один из колесных тормозных механизмов, при этом при регистрации неожиданного поведения колеса прерывают оказание тормозного воздействия и регистрируют второе поведение по меньшей мере этого же колеса и сравнивают с его первым поведением и в зависимости от результата сравнения выявляют намерение водителя произвести торможение. Прерывая оказание автоматического тормозного воздействия, вновь открывают все впускные клапаны и тем самым соединяют их, например, с главным тормозным цилиндром, в результате чего на колесные тормозные механизмы начинает действовать задаваемое водителем тормозное давление. При соответствующем изменении поведения колес в то время, когда оказание автоматического тормозного воздействия прервано, соответственно при подтверждении ранее зарегистрированного первого поведения колес вторым их поведением на основании этого согласно изобретению выявляют наличие намерения водителя произвести торможение. В качестве характеризующих поведение колес параметров регистрируют и анализируют прежде всего ускорение и частоту вращения каждого конкретного колеса. При этом прежде всего в том случае, если в качестве параметра, характеризующего первое поведение и/или второе поведение колеса, регистрируют его отрицательное ускорение, прежде всего отрицательное ускорение, которое оказывается ниже или выше некоторого задаваемого предельного значения, на основании этого выявляют наличие намерения водителя произвести торможение. Ускорение колеса в особенно предпочтительном варианте определяют при этом в зависимости от его зарегистрированной частоты вращения.
В одном из предпочтительных вариантов осуществления изобретения в том случае, когда при сравнении устанавливают, что второе поведение колеса по меньшей мере в основном соответствует его первому поведению, в зависимости от зарегистрированного второго поведения колеса согласуют модуляцию тормозного давления и продолжают ее. Таким образом, когда на описанной выше стадии было установлено, что второе поведение колеса также указывает на наличие намерения водителя произвести торможение и тем самым подтверждает правдоподобность первого зарегистрированного поведения колеса, соответствующим образом согласуют или корректируют модуляцию тормозного давления и продолжают ее. При согласовании модуляции тормозного давления прежде всего осуществляется наложение намерения водителя произвести торможение на автоматическое тормозное воздействие, благодаря чему, с одной стороны, продолжает оказываться (автоматическое) тормозное воздействие, а с другой стороны, учитывается намерение водителя произвести торможение.
В еще одном предпочтительном варианте в том случае, когда при сравнении устанавливают, что второе поведение колеса отлично от его первого поведения, продолжают без изменений оказывать тормозное воздействие. Таким образом, если во время перерыва в оказании автоматического тормозного воздействия будет установлено, что между первым поведением колеса и его вторым поведением имеются достаточно большие различия, на основании этого делают вывод об отсутствии намерения водителя произвести торможение. Соответственно возобновляют оказание тормозного воздействия, продолжая оказывать его без изменений, и прежде всего вновь закрывают временно открытый впускной клапан. Оказание тормозного воздействия целесообразно прерывать на столь короткое время, чтобы не создавалась угроза безопасности движения.
В еще одном предпочтительном варианте оказание тормозного воздействия прерывают только в том случае, когда это допускает фактическая дорожная ситуация без ущерба для безопасности движения. В данном случае прежде всего предусмотрено кратковременное прерывание оказания тормозного воздействия в момент, когда связанные с динамикой движения преимущества такого тормозного воздействия уже были использованы, благодаря чему подобное кратковременное прерывание оказания тормозного воздействия не ощущается водителем, даже если предположение о намерении водителя произвести торможение не подтверждается вторым поведением колеса.
Предлагаемая в изобретении тормозная система с отличительными признаками, представленными в п. 5 формулы изобретения, отличается тем, что она выполнена без гидравлических датчиков давления, т.е. без единого датчика давления в гидравлическом контуре, и имеет в качестве средств для выявления намерения водителя произвести торможение блок управления, специально предназначенный для осуществления предлагаемого в изобретении способа.
Такой блок управления, таким образом, для контроля поведения колес прежде всего соединен с соответствующими датчиками частоты вращения, предусмотренными для каждого из колес. Помимо этого блок управления целесообразно соединять с впускными клапанами и гидронасосом для соответствующего управления ими. Благодаря этому проявляются уже указанные выше преимущества. Другие отличительные особенности и преимущества предлагаемой в изобретении тормозной системы вытекают из сказанного выше в описании предлагаемого в изобретении способа, а также из формулы изобретения.
Ниже изобретение более подробно рассмотрено на примере одного из вариантов его осуществления со ссылкой на прилагаемый к описанию единственный чертеж, на котором схематично показана тормозная система.
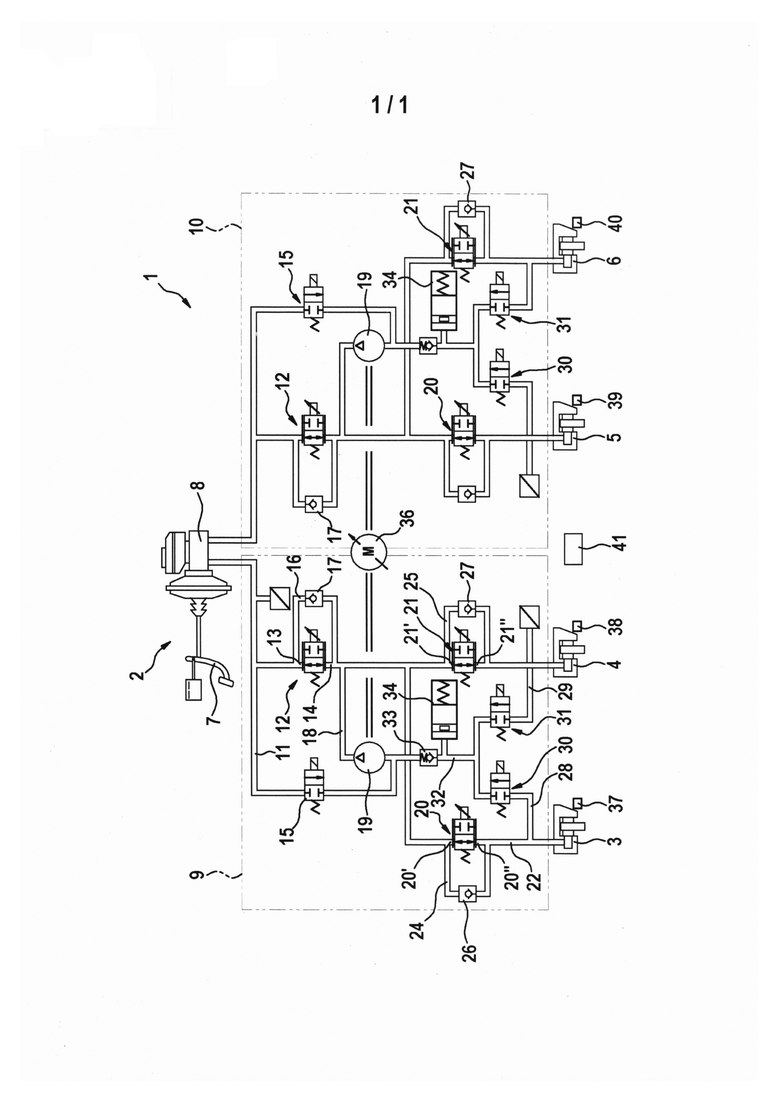
На единственном прилагаемом к описанию чертеже в упрощенном виде показана тормозная система 1 не изображенного на нем автомобиля. Такая тормозная система 1 имеет устройство 2 ее приведения в действие, которое гидравлически соединено с несколькими, в данном случае с четырьмя колесными тормозными механизмами 3, 4, 5, 6. С этой целью устройство 2 для приведения в действие тормозной системы имеет педаль 7 тормоза, которая соединена с главным тормозным цилиндром 8. Главный тормозной цилиндр 8 соединен с двумя гидравлическими контурами 9 и 10, каждый из которых соединен с двумя из четырех колесных тормозных механизмов 3-6. Оба гидравлических контура 9 и 10 выполнены при этом идентично друг другу, и поэтому их конструкция ниже более подробно поясняется на примере только гидравлического контура 9.
От главного тормозного цилиндра 8 отходит первая гидролиния 11 гидравлического контура 9, ведущая к переключающему клапану 12, который выполнен в виде двухлинейного двухпозиционного распределителя (2/2 - распределителя) с электрическим управлением (приводом). Для этого переключающий клапан 12 имеет первое присоединение 13, которое соединено с гидролинией 11, а также второе присоединение 14. От присоединения 13 к присоединению 14 ведет байпас 16, в котором расположен обратный клапан 17, который в своем закрытом положении не допускает перетекание тормозной жидкости в направлении главного тормозного цилиндра 8.
От присоединения 14 отходит, кроме того, гидролиния 18, ведущая к напорной стороне гидронасоса 19. Гидролиния 18, кроме того, разветвляется на два ответвления, одно из которых ведет к впускному клапану 20, расположенному перед колесным тормозным механизмом 3, а другое - к впускному клапану 21, расположенному перед колесным тормозным механизмом 4. Каждый из обоих впускных клапанов 20 и 21 выполнен в виде 2/2 - распределителя с электрическим управлением. В своем исходном, соответственно обесточенном состоянии впускные клапаны 20, 21 находятся в положении, в котором гидролиния 18 непосредственно соединена с колесными тормозными механизмами 3, 4. Для этого каждый их этих впускных клапанов своим первым присоединением 20', соответственно 21' соединен с гидролинией 18, а своим вторым присоединением 20'', соответственно 21'' соединен с гидролинией 22, соответственно 23, которая ведет к колесному тормозному механизму 3, соответственно 4. Для каждого из впускных клапанов 20, 21 предусмотрено, кроме того, по ведущему в обход него байпасу 24, 25, в котором расположен обратный клапан 26, соответственно 27, который в своем закрытом положении не допускает перетекание тормозной жидкости в направлении колесного тормозного механизма 3, соответственно 4.
От каждой из гидролиний 22, 23, кроме того, ответвляется гидролиния 28, соответственно 29, которая ведет к выпускному клапану 30, соответственно 31. Эти выпускные клапаны 30, 31 также выполнены в виде 2/2 - распределителей с электрическим управлением. При этом выпускные клапаны 30, 31 выполнены в виде нормально закрытых клапанов, которые, таким образом, в своем обесточенном состоянии перекрывают проходное сечение.
По ходу потока за выпускными клапанами 30, 31 гидролинии 28, 29 объединяются в общую гидролинию 32, которая соединена со всасывающей стороной гидронасоса 19. При этом в гидролинии 32 предусмотрены, кроме того, обратный клапан 33, который в своем закрытом положении не допускает перетекание тормозной жидкости в направлении выпускных клапанов 30, 31, а также гидроаккумулятор 34, который позволяет по мере необходимости накапливать и отдавать рабочую жидкость, которой в тормозной системе 1 служит тормозная жидкость.
Кроме того, от гидролинии 32 на участке между обратным клапаном 33 и гидронасосом 19 ответвляется еще одна гидролиния 35, которая ведет к запорному клапану 15 высокого давления. Этот запорный клапан 15 с одной своей стороны соединен с гидролинией 35, а с другой своей стороны - с гидролинией 11, ведущей к главному тормозному цилиндру 8. Запорный клапан 15 высокого давления выполнен в виде нормально закрытого 2/2 - распределителя.
Как уже указывалось выше, гидравлический контур 10 по своему исполнению соответствует гидравлическому контуру 9, при этом в рассматриваемом варианте оба гидронасоса 19 гидравлических контуров 9 и 10 приводятся в действие общим электродвигателем 36. Очевидно, что альтернативно возможен также вариант, в котором каждый из гидронасосов 19 снабжен собственным электродвигателем.
При работе в нормальном режиме, когда давление в колесных тормозных механизмах 3-6 должно создаваться пассивно исключительно путем нажатия на педаль 7 тормоза, переключающий клапан 12, запорный клапан 15 высокого давления, а также впускные клапаны 20, 21 находятся в своих обесточенных состояниях, и поэтому создаваемое главным тормозным цилиндром 8 давление передается далее непосредственно на колесные тормозные механизмы 3-6. Для этого переключающий клапан 12 выполнен также таким образом, что он в обесточенном состоянии находится в своем первом положении, в котором гидролиния 11 и гидролиния 18, соответственно присоединение 13 соединены с присоединением 14.
В каждой паре колесных тормозных механизмов 3, 4 и 5, 6 оба они могут относиться к колесам одной и той же оси автомобиля, т.е. к колесам его передней или задней оси, либо они могут относиться к колесам разных осей, в соответствии с чем, например, колесные тормозные механизмы 3 и 5 относятся к колесам передней оси, а колесные тормозные механизмы 4 и 6 - к колесам задней оси автомобиля. При появлении направленного на стабилизацию автомобиля тормозного воздействия со стороны ESP-системы гидронасосы 19 начинают приводиться в действие электродвигателем 36 и создавать давление в каждом из гидравлических контуров 9, 10, при этом для затормаживания или притормаживания только одного из колес в целях стабилизации автомобиля по меньшей мере один из впускных клапанов 20 или 21 соответствующего гидравлического контура 9 и/или 10 тормозной системы запитывается и тем самым переключается в свое закрытое положение, в результате чего тормозное воздействие отрабатывается только одним из колесных тормозных механизмов одного гидравлического контура. При этом запитывается также переключающий клапан 12, и поэтому создаваемое давление не передается в главный тормозной цилиндр 8. Выпускные клапаны 30 и 31 также переключаются в свое закрытое положение. Модуляция тормозного давления (давления в тормозном приводе) для стабилизирующего автомобиль воздействия осуществляется переключающим клапаном 12 и путем соответствующего регулирования давления, в том числе и посредством гидронасосов 19. Переключающий клапан 12 выполнен прежде всего в виде клапана пропорционального регулирования, который позволяет настраивать соответствующий перепад давления на нем. Такой перепад давления прежде всего регулируют непрерывно, вследствие чего и в приводимом в действие колесном тормозном механизме устанавливается непрерывно действующее давление. Таким путем обеспечивается точное регулирование давления в колесном тормозном механизме, соответственно точная модуляция тормозного давления для дозированных стабилизирующих автомобиль воздействий. Поскольку в результате этого в гидравлическом контуре 9 или 10 тормозной системы один из колесных тормозных механизмов 3 или 4, соответственно 5 или 6 остается из-за закрытого впускного клапана 20 или 21 не приводимым в действие, отсутствует (гидравлическая) связь этих колесных тормозных механизмов с водителем, соответственно с педалью тормоза. Сказанное имеет место всегда вне зависимости от схемы разделения гидравлических контуров тормозного привода между передней и задней осями.
Тормозная система 1 выполнена без единого гидравлического датчика давления, который мог бы измерять давление в главном тормозном цилиндре 8 и регистрировать тем самым намерение водителя произвести торможение. В результате при нажатии водителем на педаль 7 тормоза тот колесный тормозной механизм, который не приводится в действие при автоматическом тормозном воздействии, не может реагировать на намерение водителя произвести торможение.
Поэтому в предпочтительном варианте для каждого из колес автомобиля предусмотрено, кроме того, по датчику 37, 38, 39 и 40, который контролирует поведение соответствующего колеса. Датчики 37-40 выполнены прежде всего в виде датчиков частоты вращения, которые по характеру изменения частоты вращения или по ускорению, зарегистрированному на основании этого характера изменения частоты вращения, определяют поведение колеса, к которому относится соответствующий колесный тормозной механизм 3-6. Для этого датчики 37-40 соединены с обозначенным на чертеже лишь условно блоком 41 управления тормозной системой 1, который соответствующим образом обрабатывает данные и прежде всего управляет работой тормозной системы 1. Датчики 37-40 представляют собой во взаимодействии с блоком 41 управления так называемые наблюдающие устройства, которые регистрируют или отлеживают поведение соответствующих колес. При обнаружении одним из наблюдающих устройств, соответственно блоком 41 управления неожиданного поведения соответствующего колеса возникает предположение, что водитель тормозит, соответственно проявляет намерение произвести торможение, нажимая на педаль 7 тормоза. Для подтверждения этого предположения, соответственно для подтверждения зарегистрированного первого поведения колеса прекращают оказание тормозного воздействия, например, на тормозные механизмы колес задней оси или в гидравлическом контуре 10 тормозной системы. В результате этого в зависимости от схемы распределения колесных тормозных механизмов по контурам тормозной системы полностью один ее гидравлический контур становится пассивным, т.е. все клапаны этого гидравлического контура 9 или 10 тормозной системы более не запитываются, а возможно создаваемое водителем тормозное давление может тем самым беспрепятственно действовать со стороны главного тормозного цилиндра 8 на колесные тормозные механизмы 3, 4 или 5, 6 соответствующего гидравлического контура 9 или 10 тормозной системы. В этот момент продолжают регистрировать поведение по меньшей мере того колеса, первое поведение которого указало на возможно начатый водителем процесс торможения, и сравнивают с этим первым поведением данного колеса. При отсутствии намерения водителя произвести торможение первоначальное предположение не подтверждается, поскольку второе поведение колеса не становится соответствующим его первому поведению или его ожидаемому поведению. В этом случае затем возобновляют оказание тормозного воздействия, вновь соответствующим образом запитывая клапаны, как это описано выше.
При наличии же намерения водителя произвести торможение устанавливается определенное второе поведение по меньшей мере одного колеса, и подтверждается ранее появившееся предположение, поскольку, например, второе поведение колеса совпадает с его первым поведением, например когда первое поведение колеса и его второе поведение характеризуются снижением частоты вращения, соответственно отрицательным ускорением.
На основании этой информации о намерении водителя произвести торможение модуляцию тормозного давления согласуют таким образом, что на произведенную ранее модуляцию тормозного давления накладывается намерение водителя произвести торможение. При этом можно определять интенсивность, с которой водитель намеревается произвести торможение, т.е. задаваемый водителем требуемый тормозной момент, например в зависимости от зарегистрированного второго поведения колеса, прежде всего от зарегистрированного ускорения. Соответственно этому на основании задаваемого водителем тормозного момента согласуют модуляцию тормозного давления, соответственно тормозное воздействие путем соответствующего управления конкретной системой клапанов, благодаря чему возможны, соответственно обеспечиваются точно ''дозированные'' стабилизирующие автомобиль воздействия несмотря на фактически существующее намерение водителя произвести торможение и несмотря на отсутствие всякого датчика давления.
Кратковременно прекращать оказание тормозного воздействия в соответствующем гидравлическом контуре 9 или 10 тормозной системы целесообразно всегда в тот момент, когда связанные с динамикой движения преимущества такого воздействия уже были использованы. По этой причине кратковременное прекращение оказания тормозного воздействия не ощущается водителем, даже если не подтверждается предположение в отношении первого поведения колеса.
В целом, таким образом, в изобретении предлагается тормозная система 1, которая позволяет оказывать стабилизирующие автомобиль тормозные воздействия на тормозные механизмы колес передней и задней осей в отсутствие датчика давления без ощутимых для водителя различий с системой, оснащенной датчиком давления на входе. Даже при (автоматическом) тормозном воздействии водитель не ''теряет связь'' с колесными тормозными механизмами, поскольку на основании отслеживаемого поведения колес возможно быстрое и надежное распознавание намерения водителя произвести торможение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРМОЗНАЯ СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ТОРМОЗНОЙ СИСТЕМОЙ | 2008 |
|
RU2505431C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОТОЙ АВТОМОБИЛЬНОЙ ТОРМОЗНОЙ СИСТЕМЫ С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ И С РЕГУЛЯТОРОМ ТОРМОЗНЫХ СИЛ | 2009 |
|
RU2531652C2 |
| Модулятор силы торможения | 1984 |
|
SU1321368A3 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА И ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА | 1990 |
|
RU2041090C1 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2115576C1 |
| ГИДРАВЛИЧЕСКАЯ ТОРМОЗНАЯ СИСТЕМА | 1992 |
|
RU2062722C1 |
| АНТИБЛОКИРОВОЧНАЯ СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ АВТОМОБИЛЯ | 2004 |
|
RU2276023C1 |
| ТОРМОЗНАЯ СИСТЕМА АВТОТРАНСПОРТНОГО СРЕДСТВА С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ И РЕГУЛИРОВАНИЕМ ТОРМОЗНЫХ СИЛ ПО СЦЕПЛЕНИЮ КОЛЕС С ДОРОГОЙ | 2013 |
|
RU2666046C2 |
| ПРОТИВОБЛОКИРОВОЧНАЯ ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2114013C1 |
| ТОРМОЗНАЯ СИСТЕМА АВТОТРАНСПОРТНОГО СРЕДСТВА С ГИДРАВЛИЧЕСКИМ ПРИВОДОМ И РЕГУЛИРОВАНИЕМ ТОРМОЗНЫХ СИЛ ПО СЦЕПЛЕНИЮ КОЛЕС С ДОРОГОЙ | 2013 |
|
RU2648495C2 |
При осуществлении способа управления работой тормозной системы (1) автомобиля с гидравлическим контуром (9, 10), для оказания автоматического тормозного воздействия, создают гидронасосом (19) давление в гидравлическом контуре (9, 10) и открывают впускной клапан (20, 21) первого из колесных тормозных механизмов (3, 4; 5, 6), а впускной клапан (20, 21) второго колесного тормозного механизма (4, 3; 6, 5) в том же гидравлическом контуре (9, 10) закрывают и контролируют при этом тормозную систему (1) на намерение водителя произвести торможение. Для выявления намерения водителя произвести торможение регистрируют первое поведение одного колеса, к которому относится один из колесных тормозных механизмов (3, 4; 5, 6), при этом при регистрации неожиданного поведения колеса прерывают оказание тормозного воздействия и регистрируют второе поведение этого колеса и сравнивают с его первым поведением и в зависимости от результата сравнения выявляют намерение водителя произвести торможение. Предложена также тормозная система для автомобиля. Достигается выявление намерения водителя произвести торможение при отсутствии гидравлического датчика давления. Возможно наложение запроса водителя на торможение на автоматическое прерывание торможения. 2 н. и 4 з.п. ф-лы, 1 ил. 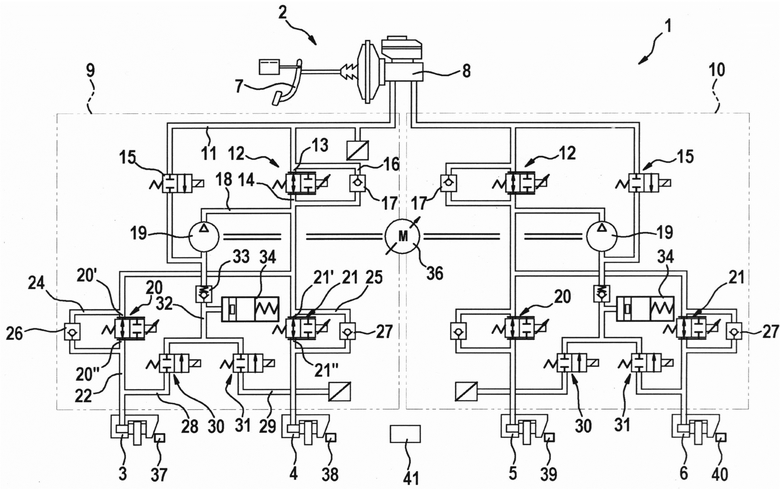
1. Способ управления работой тормозной системы (1), прежде всего тормозной системы автомобиля, имеющей по меньшей мере один гидравлический контур (9, 10) с предусмотренными в нем гидронасосом (19) и по меньшей мере двумя колесными тормозными механизмами (3, 4; 5, 6), каждый из которых снабжен по меньшей мере одним управляемым впускным клапаном (20, 21), при этом для оказания автоматического тормозного воздействия создают гидронасосом (19) давление в гидравлическом контуре (9, 10) и открывают впускной клапан (20, 21) первого из колесных тормозных механизмов (3, 4; 5, 6), а впускной клапан (20, 21) второго колесного тормозного механизма (4, 3; 6, 5) в том же гидравлическом контуре (9, 10) закрывают и контролируют при этом тормозную систему (1) на намерение водителя произвести торможение, отличающийся тем, что для выявления намерения водителя произвести торможение регистрируют первое поведение по меньшей мере одного колеса, к которому относится один из колесных тормозных механизмов (3, 4; 5, 6), при этом при регистрации неожиданного поведения колеса прерывают оказание тормозного воздействия и регистрируют второе поведение этого колеса и сравнивают с его первым поведением и в зависимости от результата сравнения выявляют намерение водителя произвести торможение.
2. Способ по п. 1, отличающийся тем, что в том случае, когда при сравнении устанавливают, что второе поведение колеса по меньшей мере в основном соответствует его первому поведению, в зависимости от зарегистрированного второго поведения колеса согласуют модуляцию тормозного давления и продолжают ее.
3. Способ по п. 1, отличающийся тем, что в том случае, когда при сравнении устанавливают, что второе поведение колеса отлично от его первого поведения, продолжают без изменений оказывать тормозное воздействие.
4. Способ по п. 2, отличающийся тем, что в том случае, когда при сравнении устанавливают, что второе поведение колеса отлично от его первого поведения, продолжают без изменений оказывать тормозное воздействие.
5. Способ по одному из пп. 1-4, отличающийся тем, что оказание тормозного воздействия прерывают, прежде всего кратковременно прерывают, только в том случае, когда это допускает фактическая дорожная ситуация без ущерба для безопасности движения.
6. Тормозная система (1) для автомобиля, имеющая по меньшей мере один гидравлический контур (9, 10) с предусмотренными в нем гидронасосом (19) и по меньшей мере двумя колесными тормозными механизмами (3, 4; 5, 6), каждый из которых снабжен по меньшей мере одним управляемым впускным клапаном (20, 21), и средства для выявления намерения водителя произвести торможение, отличающаяся тем, что она выполнена без датчиков давления, а указанные средства имеют блок управления, осуществляющий способ по одному из пп. 1-5.
| Бесканатная подъемная установка | 1971 |
|
SU482379A1 |
| Устройство для автоматического управления антиблокировочным торможением автомобиля | 1984 |
|
SU1301739A1 |
| Устройство для регулирования давления в тормозном приводе транспортного средства | 1986 |
|
SU1804402A3 |

