Изобретение относится к способу надежного управления тормозным моментом системы привода с синхронной машиной. Кроме того, изобретение относится к системе привода и к транспортному средству, в частности, рельсовому транспортному средству с такой системой привода.
Системы привода, которые имеют вентильный преобразователь и двигатель, также называемый электрической машиной, могут очень точно предоставлять на валу двигателя желательный крутящий момент. Это относится как к моментам для ускорения двигателя, так и к тормозным моментам для торможения двигателя.
Это положение дел будет рассмотрено более подробно ниже на примере рельсовых транспортных средств. Рельсовые транспортные средства в настоящее время в основном используют электрический привод. Двигатель обеспечивает то, что транспортное средство может ускоряться и тормозиться. При торможении двигателем, электрическая энергия вводится обратно (рекуперирует) и затем подается в питающую сеть или уничтожается посредством тормозных сопротивлений. В дополнении к электрическому тормозу, транспортные средства также имеют механический тормоз, также называемый фрикционным тормозом с тормозными дисками или колесными тормозами. Это второе механическое устройство торможения необходимо прежде всего для того, чтобы иметь возможность безопасно тормозить транспортное средство в случае выхода из строя электрического тормоза. Современные системы привода работают настолько надежно, что механический тормоз практически требуется только для торможения при остановке, но несмотря на это должен проектироваться в расчете на весь диапазон чисел оборотов.
Правила допуска к эксплуатации требуют надежного торможения транспортного средства, которое в каждом транспортном средстве надежно приводит транспортное средство к остановке. В настоящее время, для этой цели предусматривается механический тормоз, который имеет четкую структуру, из которой легко понять способ функционирования. Однако он подвержен износу, так что требует регулярного технического обслуживания.
При современном регулировании вентильного преобразователя, можно в пределах номинальных данных машины и вентильных преобразователей устанавливать любой крутящий момент и, следовательно, тормозной момент. Вообще, регулирование вентильного преобразователя, ввиду множества его входных параметров и внутренних вычислительных операций, является очень сложным. По этой причине, подтверждение безотказного регулирования для всех возможных состояний транспортного средства и условий эксплуатации чрезвычайно трудно обеспечить. Таким образом, вентильный преобразователь с его нынешним регулированием пригоден только в качестве рабочего тормоза, который дополняется механическим тормозом, рассчитанным для транспортного средства и его характеристик, чтобы обеспечить требования безопасности.
Из DE 101 60 612 A1 известен тяговый привод с тяговым вентильным преобразователем и синхронной машиной с возбуждением от постоянных магнитов. На синхронной машине, также обозначаемой как синхронный двигатель, можно простым способом генерировать тормозной момент за счет того, что клеммы синхронной машины соединяются с сопротивлениями. Данная публикация описывает переключение на группу сопротивлений, чтобы надежно тормозить транспортное средство. Тормозной момент устанавливается на основе параметров машины и значения сопротивления, а также числа оборотов.
Из US 2012/0043817 A1 известна система привода для применения с изолированной сетью переменного напряжения. Эта система привода имеет трехфазную электрическую машину, которая может работать как двигатель или генератор.
В основе изобретения лежит задача предложить способ надежного торможения системы привода с синхронной машиной, при котором надежно генерируется тормозной момент, которым можно управлять.
Эта задача решается с помощью способа надежного управления тормозным моментом системы привода, причем система привода содержит синхронную машину и устройство переключения, причем синхронная машина имеет фазные выводы, причем устройство переключения в первом состоянии соединяет фазные выводы друг с другом таким образом, что в синхронной машине возникает первый тормозной момент МBr1, а во втором состоянии соединяет фазные выводы друг с другом таким образом, что в синхронной машине возникает второй тормозной момент МBr2, при этом устройство переключения переключается между состояниями таким образом, что во временном среднем на синхронной машине обеспечивается задаваемый тормозной момент М*. Эта задача также решается с помощью системы привода для осуществления способа для надежного управления тормозным моментом, причем система привода содержит синхронную машину и устройство переключения, причем синхронная машина имеет фазные выводы, причем устройство переключения электрически соединено с фазными выводами, причем устройство переключения имеет первое и второе состояние, причем по меньшей мере одно значение импедансов между фазными выводами в первом и втором состоянии устройства переключения отличается друг от друга. Кроме того, указанная задача решается транспортным средством, в частности, рельсовым транспортным средством с соответствующей системой привода.
Предпочтительные варианты осуществления изобретения приведены в зависимых пунктах формулы изобретения.
Изобретение основано на установлении того факта, что синхронная машина, особенно синхронная машина с возбуждением постоянными магнитами, пригодна для того, чтобы обеспечивать безопасное торможение. Синхронная машина имеет свойство, состоящее в том, что как только она приводится во вращение, она генерирует напряжение, которое через сопротивления приводит к токам и, тем самым, к тормозному моменту. Таким образом, можно создать простой электрический тормоз с небольшим количеством элементов. С помощью небольшого количества элементов этот тормоз пригоден для удовлетворения требований допуска для надежного электрического тормоза. Ввиду низкой сложности, подтверждение требуемой надежности возможно относительно простым способом.
В дополнение к надежному созданию тормозящего действия, тормоз должен быть управляемым, например, для того, чтобы не превышать максимальное значение трения между колесом и рельсом.
Для того чтобы обходиться с как можно меньшим количеством дополнительных компонентов для управления элементами, которые повышали бы сложность управления и затрудняли бы подтверждение надежности, для генерации тормозного момента предусматривается устройство переключения в системе привода. Задачей устройства переключения является то, что устройство переключения соединяет фазные выводы синхронной машины таким образом, что в по меньшей мере двух состояниях устройства переключения в синхронной машине возникают два различных тормозных момента. При этом оказалось выгодным, если в первом состоянии устройства переключения фазные выводы синхронной машины замыкаются накоротко, а во втором состоянии устройства переключения фазные выводы, предпочтительно симметрично по отношению друг к другу, соединяются с по меньшей мере одним сопротивлением. Для получения симметрии, оказалось выгодным, токи фазных выводов выпрямлять, например, с помощью диодного моста B6, а затем подавать выпрямленный ток на сопротивление. Путем переключения между обоими состояниями устройства переключения реализуется тормозной момент синхронной машины, который соответствует временному среднему значению из приложенного первого тормозного момента и приложенного второго тормозного момента. Соответствующее целевое значение, также обозначаемое как задаваемый тормозной момент, может задаваться системе управления. В качестве особенно предпочтительного оказалось, если переключение между состояниями устройства переключения происходит с частотой порядка 10 Гц. При этой частоте переключения или более высокой частоте переключения, колебание тормозного момента вследствие инерции системы привода не влияет существенным образом на число оборотов или скорость системы привода.
В качестве устройства переключения может применяться уже существующий в системе привода автономный вентильный преобразователь с одним или несколькими задатчиками (исполнительными элементами) торможения в промежуточном контуре. При применении нескольких задатчиков торможения достижимо больше состояний устройства переключения, из которых может генерироваться задаваемый тормозной момент на синхронной машине. Задатчиками торможения называют последовательную цепь из сопротивления и переключателя, причем эта последовательная цепь расположена электрически параллельно конденсатору промежуточного контура автономного вентильного преобразователя. При этом переключатель чаще всего выполняется как силовой электронный переключатель, чтобы он мог использоваться для быстрых операций переключения, до диапазона кГц. В запертом состоянии силовых полупроводников автономного вентильного преобразователя, безынерционные диоды автономного вентильного преобразователя проводят ток, когда напряжение промежуточного контура снижается за счет тормозного сопротивления. Энергия торможения преобразуется посредством тормозного сопротивления в тепло. Переключатель, который соединяет тормозное сопротивление с промежуточным контуром, может быть реализован, чтобы использовать по возможности меньше электронных компонентов, например, с помощью контактора, который во время торможения продолжительно включает тормозное сопротивление. За счет выбора значения сопротивления усилие торможения устанавливается через число оборотов или скорость.
Для реализации особенно предпочтительного управления тормозным моментом, автономный вентильный преобразователь должен управляться таким образом, что периодически происходит переход из состояния ʺток через безынерционные диодыʺ, в котором фазные выводы электрически соединены с сопротивлением задатчика торможения через безынерционные диоды, в состояние ʺкороткое замыканиеʺ, в котором фазные выводы синхронной машины с помощью силовых полупроводниковых переключателей автономного вентильного преобразователя замыкаются накоротко. Из-за высоких индуктивностей синхронной машины, в частности, в случае возбуждаемых постоянными магнитами синхронных машин, во время короткого замыкания фазных выводов не возникают недопустимо высокие для автономных вентильных преобразователей токи. Чаще всего токи короткого замыкания лишь несущественно больше, чем номинальные токи. При коротком замыкании электрической машины, причем электрическая машина также обозначается как двигатель, получается другая характеристика торможения, которая особенно при высоких числах оборотов почти не имеет крутящего момента. Путем периодического переключения состояний осуществляется переход между характеристиками торможения. В зависимости от соотношения сравнения временной длительности двух состояний, таким образом, достижима в среднем характеристика торможения, которая лежит между характеристикой сопротивления и характеристикой короткого замыкания. От максимальной скорости до малых скоростей возможно, таким образом, непрерывное управление тормозным моментом между максимальным моментом и малыми моментами.
Это управление тормозным моментом не требует никакого регулирования машины или тока, например, с использованием параметров машины. Только системой противоскольжения, известной также в других транспортных средствах как антиблокировочная системы, кратко ABS, может запрашиваться больший или меньший момент, и, тем самым, крутящий момент снижается по отношению к максимальному значению или снова увеличивается.
При малом числе оборотов характеристика короткого замыкания и характеристика сопротивления тормозного момента пересекаются. В этой точке больше невозможна никакая регулировка крутящего момента с помощью этого способа. Управление может быть реализовано при этом числе оборотов или скорости тем, что переключатель задатчика торможения тактируется, то есть периодически управляется. Тактирование задатчика торможения с глубиной модуляции <1 действует как увеличение подключенного сопротивления. Тем самым, получается, например, при сопротивлении 1 Ом и глубине модуляции 50% характеристика тормозного момента как при сопротивлении 2 Ом и глубине модуляции 100%. При этом глубина модуляции 100% означает, что переключатель продолжительно включен.
Посредством тактирования переключателя задатчика торможения также при повышенных числах оборотов возникает дополнительная возможность воздействия. Так как величина тормозного сопротивления определяет положение максимума тормозного момента, то, таким образом, возможно смещение этого максимума посредством глубины модуляции задатчика торможения. Таким образом, можно переходить, в зависимости от глубины модуляции задатчика торможения, в среднем от некоторой характеристики к сниженной характеристике. Если применяется эта возможность регулировки, то сопротивление может выбираться относительно низкоомным, так что достигается максимальный тормозной момент при низкой скорости. Выше этой скорости, эффективное тормозное сопротивление может тогда повышаться за счет модуляции задатчика торможения, так что максимальный тормозной момент доступен до максимальной скорости.
Однако, при очень низких числах оборотов, особенно вблизи остановки, посредством представленного способа больше невозможно использование электрического тормоза. Там, транспортное средство должно доводиться до остановки с помощью простого стояночного тормоза. Энергия торможения, которая для этой последней остаточной скорости должна быть преобразована в тепло, на порядки меньше, чем полная энергия поезда с максимальной скоростью. Поэтому механический тормоз для остаточного торможения может проектироваться в расчете на весьма незначительное тепло и, следовательно, весьма рентабельно.
Переключение между характеристикой короткого замыкания и характеристикой сопротивления для тормозного момента в предпочтительной форме выполнения может быть реализовано посредством простого блока временных функций (таймера), чтобы устанавливать временное среднее значение характеристик. Для торможения транспортного средства, частота повторения около 10 Гц будет полностью достаточной, чтобы колебания тормозного момента транспортного средства не воспринимались. Преимущество состоит в нерегулируемом исполнении. Другая возможная форма выполнения состоит в том, что отношение импульса-паузы синхронизируется с числом оборотов машины. Число оборотов или частота электрических параметров, например, может быть получена из измеренных токов машины. Тем самым состояние ʺкороткое замыканиеʺ принимается как постоянное число на период основного колебания. При непрерывной регулировке отношения импульса-паузы нет никаких переходных процессов. Регулирование тока также не требуется. Отношение импульса-паузы может задаваться постоянным. Только частота определяется через синхронизацию.
Также тактирование переключателя задатчика торможения, как описано выше, для расширения диапазона характеристики тормозных моментов, может устанавливаться управляемым образом из параметров состояния. Например, глубина модуляции может варьироваться в зависимости от числа оборотов. И здесь регулирование не требуется.
В диодном режиме, на сопротивлении протекает ток одновременно не через шесть, а через три безынерционных диода, в зависимости от знака тока через верхний или нижний безынерционный диод. При этом могут возникать следующие состояния переключения: либо через один верхний и два нижних безынерционных диода, либо, наоборот, через два верхних и один нижний безынерционный диод. Всего имеется шесть возможных комбинаций. Поэтому для перехода к короткому замыканию в вентильном преобразователе не требуется включать три силовых полупроводниковых переключателя вентильного преобразователя. Достаточно включать один силовой полупроводниковый переключатель вентильного преобразователя, а именно, тот, который расположен в той же (верхней или нижней) половине вентильного преобразователя, что и проводящие безынерционные диоды. Это может быть выведено с помощью простой логики из знаков токов. При этом способе, частота переключения силовых полупроводников соответствует основной частоте двигателя, что также сводит к минимуму потери вентильного преобразователя.
Описанный метод также применим, если вместо задатчика торможения или дополнительно к задатчику торможения применяется внешнее резисторное средство.
В равной степени также возможно подключить параллельно к безынерционным диодам вентильного преобразователя дополнительный вентильный преобразователь и сопротивление. При этом уменьшение тормозного момента путем короткого замыкания с помощью вентильного преобразователя осуществляется так, как описано.
То, с какой мощностью двигатель фактически тормозит, может быть определено простым вычислением из напряжений и токов на двигателе. Тем самым, для повышения надежности, действенность тормоза может проверяться простым и эффективным образом. Это повышает надежность электрического тормоза и упрощает допущение такого способа для транспортного средства, в частности, для рельсового транспортного средства. В качестве альтернативы, вычисление приложенного к синхронной машине тормозного момента может осуществляться путем измерения напряжения и тока на сопротивлении. Из этих параметров можно определить, действительно ли транспортное средство тормозится, и соответствует ли тормозной момент целевому значению. Тем самым, самоконтроль способа для надежного управления тормозным моментом может быть реализован простым и надежным образом.
В дальнейшем изобретение описывается и поясняется более подробно со ссылкой на примеры выполнения, представленные на чертежах, на которых показано следующее:
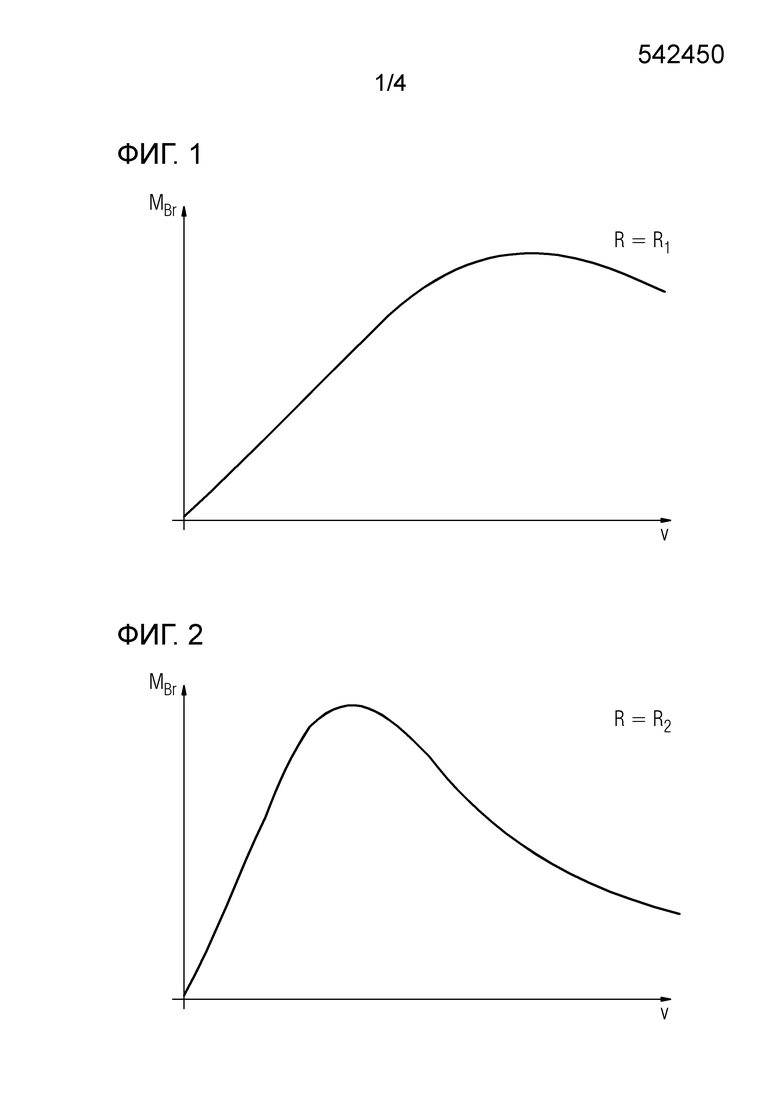
Фиг. 1, фиг. 2 - примерная характеристика тормозного момента в зависимости от скорости для двух различных значений сопротивления,
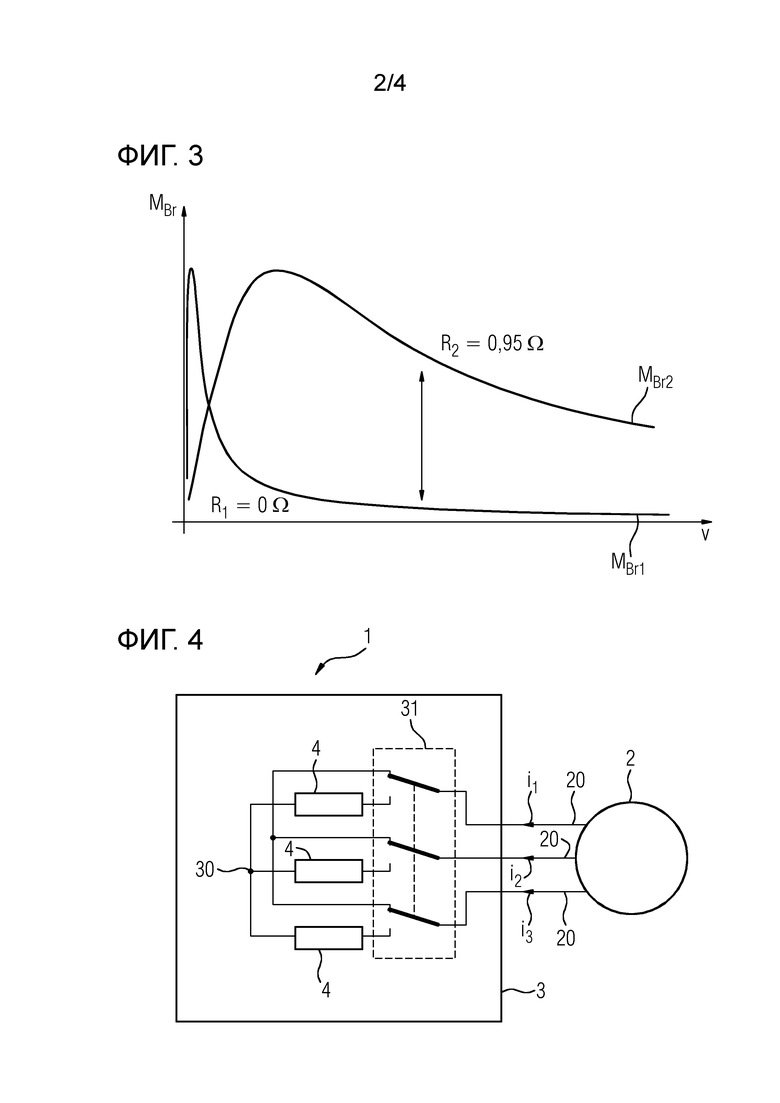
Фиг. 3 - примерная характеристика двух тормозных моментов,
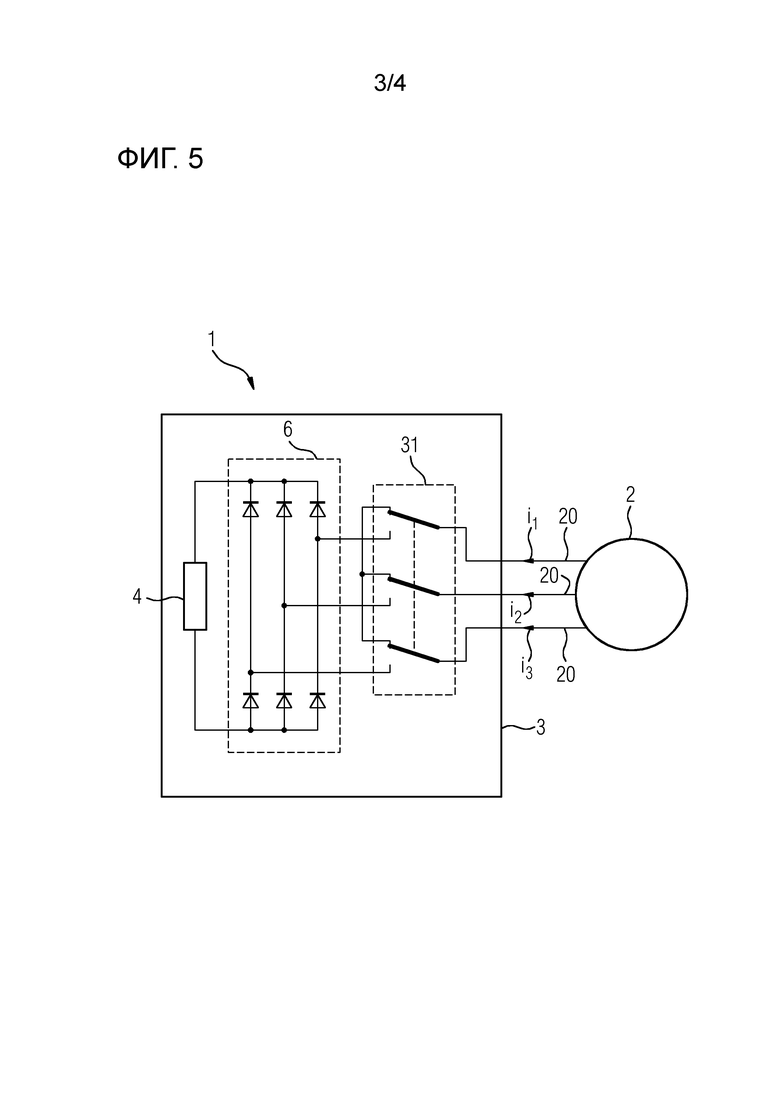
Фиг. 4 - первый пример выполнения изобретения,
Фиг. 5 - второй пример выполнения изобретения и
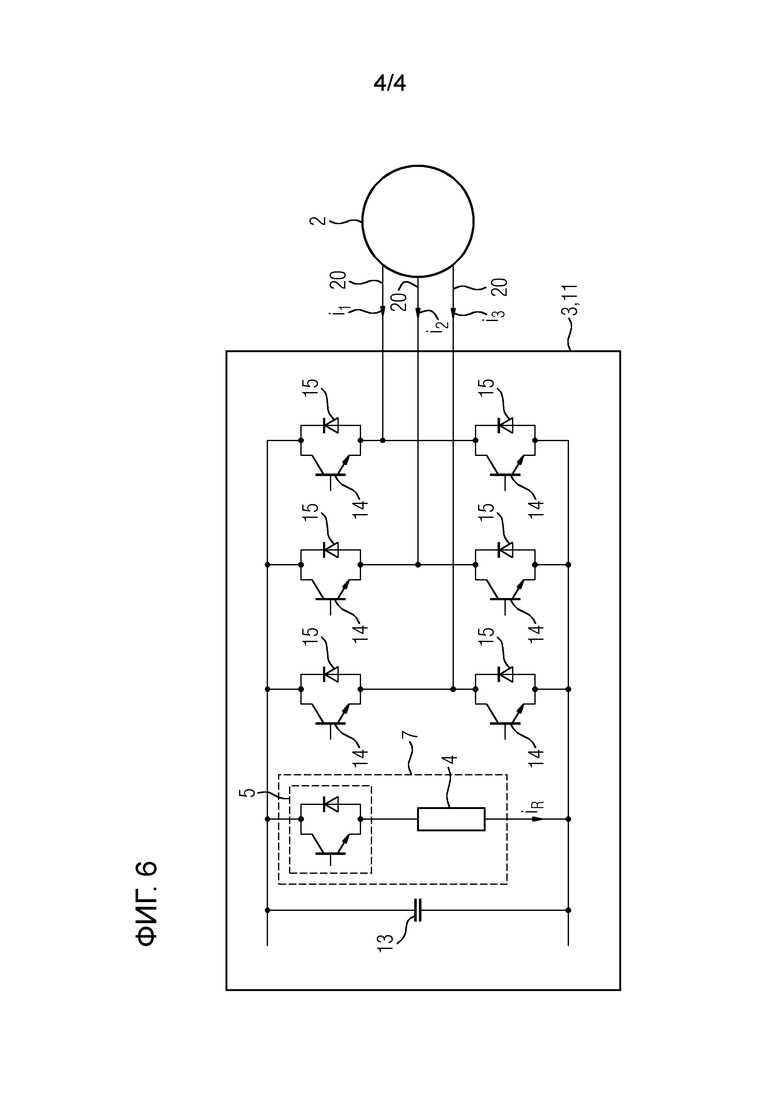
Фиг. 6 - еще один пример выполнения с автономным вентильным преобразователем в качестве устройства переключения.
На фиг. 1 показана характеристика тормозного момента МBr в зависимости от числа оборотов для случая, когда фазные выводы 20 электрически соединены с сопротивлением 4, имеющим значение R1. Для второго сопротивления 4, имеющего значение R2 при R2<R1, характеристика показана на фиг. 2. Можно видеть, что максимум достижимого тормозного момента MBr для меньших сопротивлений 4 возникает при более низких скоростях. При числе оборотов, равном нулю, независимо от значения сопротивления, недостижим никакой тормозной момент МBr на синхронной машине 2. Для того чтобы и в состоянии покоя иметь возможность прикладывать тормозной момент к системе привода, в системе привода 1 должен быть предусмотрен дополнительный тормоз, например, механический тормоз.
На фиг. 3 показана характеристика первого тормозного момента MBr1, причем она возникает ввиду того, что фазные выводы 20 синхронной машины 2 закорочены, и характеристика второго тормозного момента МBr2, при которой фазные выводы 20 соединены между собой через по меньшей мере одно сопротивление 4. Область, которая лежит между обеими характеристиками, может быть использована способом для надежного управления тормозным моментом МBr таким образом, чтобы генерировать на синхронной машине 2 тормозной момент МBr. Область выше второго тормозного момента, по меньшей мере часть, лежащая справа от максимума второго тормозного момента МBr2, может тогда генерироваться в синхронной машине 2, если устройство 3 переключения содержит переключатель 5, который временно прерывает протекание тока через сопротивление 4. С помощью такого прерывания можно повысить эффективное сопротивление на фазных выводах 20, что приводит к сдвигу максимума к более высоким числам оборотов.
Фиг. 4 показывает первый пример выполнения изобретения. Система 1 привода имеет синхронную машину 2, в частности, синхронную машину 2 с возбуждением постоянными магнитами и устройство 3 переключения, которые электрически соединены друг с другом через фазные выводы 20. Устройство 3 переключения включают в себя переключатель 31 устройства переключения. Он замыкает накоротко в показанном верхнем положении переключателя 31 устройства переключения фазные выводы 20, в то время как переключатель 31 устройства переключения во втором положении, то есть в нижнем положении показанного переключателя 31 устройства переключения, соединяет друг с другом фазные выводы 20 синхронной машины 2 через соединение звездой сопротивлений 4. Соединение звездой формируются посредством соединения между переключающими контактами переключателя 31 устройства переключения и нейтралью 30, причем в этом соединении расположено, соответственно, сопротивление 4. Оказалось предпочтительным, предусмотреть одинаковые значения сопротивлений для показанных сопротивлений 4. Тем самым, тормозной момент при вращении двигателя является постоянным. За счет этого можно избежать нежелательных рывков, например, в транспортном средстве или рельсовом транспортном средстве.
Пример выполнения согласно фиг. 5 по сравнению с примером выполнения согласно фиг. 4 обходится с меньшим числом сопротивлений 4. Во избежание повторений, можно сослаться на описание фиг. 4, а также на введенные там ссылочные позиции. Кроме того, в примере выполнения согласно фиг. 5, равномерный тормозной момент в течение всего вращения синхронной машины 2 достигается тем, что в отношении всех фазных выводов 20 за счет выпрямления создаются симметричные условия. Выпрямление токов фазных выводов 20 осуществляется с помощью средства 6 для выпрямления. В этом примере выполнения это осуществляется с помощью диодного моста. Этот диодный мост также известен как неуправляемый B6-мост или диодный мост В6. Он не требует никакого управления и может с низкими затратами встраиваться в устройство 3 переключения.
На фиг. 6 показан пример выполнения, в котором устройство переключения образовано автономным вентильным преобразователем 11. Во избежание повторений, можно сослаться на описание фиг. 1-5 и введенные там ссылочные позиции. Автономный вентильный преобразователь 11 имеет задатчик 7 торможения, конденсатор 13 промежуточного контура и силовые полупроводниковые приборы 13, 14. В промежуточном контуре находится задатчик 7 торможения. Он расположен параллельно конденсатору 13 промежуточного контура. Задатчик торможения включает в себя последовательную цепь из сопротивления 4 и переключателя 5. Силовые полупроводниковые приборы 13, 14 вентильного преобразователя, т.е. силовой полупроводниковый переключатель 14 и безынерционный диод 15 берут на себя роль переключателя 31 устройства переключения. Если ни один из силовых полупроводниковых переключателей не управляется, то токи могут протекать только через безынерционные диоды 15 автономного вентильного преобразователя 11. Это происходит в том случае, когда напряжение промежуточного контура, то есть напряжение на конденсаторе 13 промежуточного контура меньше, чем амплитуда напряжения, индуцированного синхронной машиной 2. При необходимости, напряжение конденсатора 13 промежуточного контура посредством включения переключателя 5 может снижаться настолько, что безынерционные диоды 15 становятся проводящими, и ток протекает через сопротивление 4.
Переключатель 5 в этой форме выполнения может быть выполнен, например, как силовой электронный переключатель, как представлено на чертеже, или как механический переключатель. В одном варианте осуществления в качестве силового электронного переключателя, он может переключаться с высокой частотой. Переключение силового электронного переключателя также обозначается как тактирование. Если требуется особенно простая конструкция, то в качестве переключателя 5 может быть использован механический переключатель, например, контактор. Этот переключатель 5 не требует управляющей электроники. За счет такого простого управления механический переключатель, в частности, подходит для систем, связанных с безопасностью, в частности, для надежного торможения транспортного средства.
В первом состоянии устройства 3 переключения, фазные выводы 20 синхронной машины 2 замкнуты накоротко. Это осуществляется с помощью силовых полупроводниковых приборов 14, 15 автономного вентильного преобразователя 11. Для получения короткого замыкания, все фазные выводы 20 соединяются с верхним или нижним потенциалом промежуточного контура. Для этого необходимо включить по меньшей мере один силовой полупроводниковый переключатель 14. На основе выпрямления токов i1, i2, i3 фазных выводов 20, определяется, протекает ли соответствующий короткому замыканию фазный ток через силовой полупроводниковый переключатель 14 или безынерционные диоды 15. Тогда нужно только управлять силовым полупроводниковым переключателем 14, то есть включать, чтобы происходило короткое замыкание фазных выводов 20. Чтобы избежать логики выбора для управления силовым полупроводниковым переключателем 15, можно для получения короткого замыкания управлять всеми верхними силовыми полупроводниковыми переключателями 15. В качестве верхних силовых полупроводниковых переключателей 15 обозначены силовые полупроводниковые переключатели 15, которые соединены с положительным потенциалом промежуточного контура. Под нижними силовыми полупроводниковыми переключателями 15 понимаются силовые полупроводниковые переключатели 15, которые соединены с отрицательным потенциалом промежуточного контура.
Во втором состоянии устройства 3 переключения, в котором фазные выводы синхронной машины соединены с сопротивлением 4, переключатель 5 должен продолжительно включаться или тактироваться. Посредством тактирования, то есть повторного включения и выключения переключателя 5, эффективное для тормозного момента синхронной машины 2 сопротивление 4 увеличивается. Таким образом, диапазон достижимых на синхронной машины тормозных моментов увеличивается, как описано со ссылкой на фиг. 3. Так как параллельно задатчику 7 торможения расположен конденсатор 13 промежуточного контура, переключатель 5 может размыкаться простым способом, даже если токи вызываются индуктивностями синхронной машины 2, как для этих токов при выключении переключателя 5 создается путь тока через конденсатор 13 промежуточного контура. Силовые полупроводниковые переключатели 14 автономного вентильного преобразователя 11 не управляются во втором состоянии устройства 3 переключения, то есть, эти силовые полупроводниковые переключатели 14 выключены.
Хотя изобретение подробно проиллюстрировано и описано с помощью предпочтительных примеров выполнения, настоящее изобретение не ограничено только раскрытыми примерами, и другие варианты могут быть получены на их основе специалистом в данной области техники без отступления от объема защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕНТИЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕННОГО ТОКА С РАСПРЕДЕЛЕННЫМИ ТОРМОЗНЫМИ СОПРОТИВЛЕНИЯМИ | 2009 |
|
RU2506691C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 1992 |
|
RU2022824C1 |
| ДИЗЕЛЬ-ЭЛЕКТРИЧЕСКАЯ ПРИВОДНАЯ СИСТЕМА | 2007 |
|
RU2427482C2 |
| ЭНЕРГОЭФФЕКТИВНЫЙ ТЯГОВЫЙ ЭЛЕКТРОПРИВОД АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2653945C1 |
| ЭНЕРГОБЛОК ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ МОЩНОЙ АВТОНОМНОЙ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНЫ | 2019 |
|
RU2754989C2 |
| РЕВЕРСИВНЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОПРИВОД (ВАРИАНТЫ) | 1999 |
|
RU2142193C1 |
| ДИЗЕЛЬ-ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ПРИВОДА | 2009 |
|
RU2498492C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ЭЛЕКТРОТЯГОЙ | 2000 |
|
RU2171753C1 |
| САМОХОДНАЯ МАШИНА С ЭЛЕКТРИЧЕСКОЙ СИСТЕМОЙ ПРИВОДА | 2019 |
|
RU2715820C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2692288C1 |
Группа изобретений относится к электродинамическим тормозным системам для транспортных средств. Способ надежного управления тормозным моментом системы (1) привода, которая содержит синхронную машину (2) и устройство (3) переключения, заключается в следующем. Устройство (3) переключения в первом состоянии замыкает фазные выводы (20) синхронной машины (2) накоротко, при этом на синхронной машине (2) возникает первый тормозной момент (МBr1). Во втором состоянии фазные соединения (20) синхронной машины (2) соединяются с по меньшей мере одним сопротивлением (4), при этом на синхронной машине (20) возникает второй тормозной момент (МBr2). При этом устройство (3) переключения переключается между состояниями таким образом, что во временном среднем на синхронной машине (2) получается задаваемый тормозной момент (М*). Причем переключение между состояниями устройства (3) переключения осуществляют периодически с частотой переключения 10 Гц или более. Заявлена также система привода для осуществления способа управления тормозным моментом и рельсовое транспортное средство с предложенной системой привода. Технический результат заключается в повышении надежности электродинамической тормозной системы. 3 н. и 8 з.п. ф-лы, 6 ил.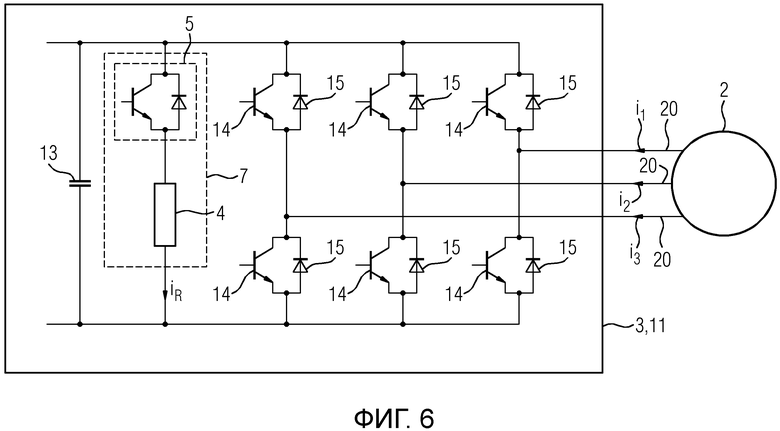
1. Способ надежного управления тормозным моментом системы (1) привода, причем система (1) привода содержит синхронную машину (2) и устройство (3) переключения, причем синхронная машина (2) имеет фазные выводы (20), причем устройство (3) переключения в первом состоянии соединяет фазные выводы (20) друг с другом таким образом, что на синхронной машине (2) возникает первый тормозной момент (МBr1), а во втором состоянии соединяет фазные выводы (20) друг с другом таким образом, что на синхронной машине (20) возникает второй тормозной момент (МBr2), при этом устройство (3) переключения переключается между состояниями таким образом, что во временном среднем на синхронной машине (2) получается задаваемый тормозной момент (М*), причем для формирования первого тормозного момента (МBr1) фазные выводы (20) синхронной машины (2) замыкают накоротко, причем для формирования второго тормозного момента (МBr2) фазные выводы (20) синхронной машины (2) соединяют с по меньшей мере одним сопротивлением (4), причем переключение осуществляют периодически, причем переключение между состояниями устройства (3) переключения осуществляют с частотой переключения 10 Гц или с более высокой частотой переключения, причем способ применяют для торможения транспортного средства, особенно рельсового транспортного средства, причем переключением между состояниями устройства (3) переключения управляют с помощью таймера, причем переключение с помощью таймера осуществляют нерегулируемым образом.
2. Способ по п. 1, причем состояние «короткое замыкание» занимает постоянное число периодов основного колебания.
3. Способ по п. 1 или 2, причем для повышения надежности действия тормоза из напряжений и токов на фазных выводах (20) синхронной машины (2) проверяют, достигается ли заданный тормозной момент на синхронной машине (2).
4. Способ по любому из пп. 1-3, причем система (1) привода содержит механический тормоз, причем при падении ниже установленного числа оборотов привода или установленной скорости транспортного средства активируется механический тормоз.
5. Способ по любому из пп. 1-4, причем для формирования второго тормозного момента (МBr2) токи (i1, i2, i3) фазных выводов (20) синхронной машины (2) выпрямляют и после выпрямления подают на по меньшей мере одно сопротивление (4).
6. Способ по любому из пп. 1-5, причем ток (iR) через по меньшей мере одно сопротивление (4) посредством переключателя (5) прерывают таким образом, что значение сопротивления, эффективное для формирования второго тормозного момента (МBr2), изменяется таким образом, что второй тормозной момент (МBr2) изменяется.
7. Способ по любому из пп. 1-6, причем устройство (3) переключения образовано автономным вентильным преобразователем (11), причем автономный вентильный преобразователь (11) на стороне постоянного напряжения электрически параллельно конденсатору (13) промежуточного контура содержит последовательную цепь из сопротивления (4) и переключателя (5), причем по меньшей мере одним силовым полупроводниковым переключателем (14) автономного вентильного преобразователя (11) в первом состоянии автономного вентильного преобразователя (11) управляют таким образом, что фазные выводы (20) замыкаются накоротко, а во втором состоянии автономного вентильного преобразователя (11) не управляют, так что фазные выводы (20) соединены через безынерционные диоды (15) с сопротивлением (4).
8. Система (1) привода для осуществления способа надежного управления тормозным моментом по любому из пп. 1-7, причем система (1) привода содержит синхронную машину (2) и устройство (3) переключения, причем синхронная машина (2) имеет фазные выводы (20), причем устройство (3) переключения электрически соединено с фазными выводами (20), причем устройство (3) переключения имеет первое и второе состояния, причем в первом состоянии устройства (3) переключения фазные выводы (20) замкнуты накоротко, причем во втором состоянии устройства (3) переключения фазные выводы (20) синхронной машины (2) соединены с по меньшей мере одним сопротивлением (4), причем система привода содержит таймер, посредством которого переключение между состояниями устройства (3) переключения может управляться периодически и с частотой переключения 10 Гц или с более высокой частотой переключения, причем переключение с помощью таймера выполняется нерегулируемым образом.
9. Система (10) привода по п. 8, причем во втором состоянии устройства (3) переключения фазные выводы (20) синхронной машины (2) соединены, соответственно, через сопротивление (4) с нейтралью (30).
10. Система (10) привода по п. 8, причем устройство (3) переключения образовано автономным вентильным преобразователем (11), причем автономный вентильный преобразователь (11) на стороне переменного напряжения соединен с фазными выводами (20) синхронной машины (2), причем автономный вентильный преобразователь (11) на стороне постоянного напряжения содержит промежуточный контур, причем сопротивление (4) с переключателем (5) расположено в последовательной цепи, причем упомянутая последовательная цепь включена электрически параллельно промежуточному контуру автономного вентильного преобразователя (11).
11. Транспортное средство, особенно рельсовое транспортное средство, с системой (1) привода по любому из пп. 8-10.
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2398348C1 |

