Область техники, к которой относится изобретение
[1] Устройства и способы в соответствии с примерными вариантами осуществления относятся к гибкому устройству и к способам его работы, а более конкретно, к гибкому устройству, которое изменяет форму с использованием множества пьезоэлектрических веществ, и к способам его работы.
Уровень техники
[2] Совершенствование электронных технологий обеспечивает разработку различных типов электронных устройств. Широко используются традиционные устройства отображения, такие как телевизионные приемники, персональные компьютеры, переносные компьютеры, планшетные компьютеры, мобильные телефоны и MP3-проигрыватели.
[3] Чтобы удовлетворять потребности клиентов в новых устройствах, разрабатывается "устройство отображения следующего поколения".
[4] Один пример устройства отображения следующего поколения представляет собой гибкое дисплейное устройство. "Гибкое дисплейное устройство" означает устройство отображения, сконфигурированное с возможностью изменять форму.
[5] Гибкое дисплейное устройство может изменять форму в ответ на силу пользователя, приложенную к нему.
[6] Соответственно, конструкция гибкого устройства и способ его работы обязательно должны удовлетворять различные потребности пользователя.
Сущность изобретения
Техническая задача
[7] Согласно примерным вариантам осуществления, предоставляется гибкое устройство, которое может изменять форму с использованием множества пьезоэлектрических веществ, и способы его работы.
Решение задачи
[8] Примерные варианты осуществления преодолевают вышеуказанные недостатки и другие недостатки, не описанные выше. Кроме того, примерные варианты осуществления не обязательно должны преодолевать недостатки, описанные выше, и примерный вариант осуществления может не преодолевать ни одну из проблем, описанных выше.
[9] Согласно аспекту примерного варианта осуществления, предусмотрено гибкое устройство, включающее в себя гибкий корпус, нижний пьезоэлектрический слой из первого множества пьезоэлектрических материалов, расположенных на гибком корпусе, промежуточный слой, расположенный на нижнем пьезоэлектрическом слое, верхний пьезоэлектрический слой из второго множества пьезоэлектрических материалов, расположенный на промежуточном слое, и гибкую панель отображения, поддерживаемую посредством гибкого корпуса.
[10] Гибкое устройство дополнительно может включать в себя контроллер, сконфигурированный с возможностью прикладывать сигнал возбуждения, по меньшей мере, к одному из первого множества пьезоэлектрических материалов нижнего слоя и второго множества пьезоэлектрических материалов верхнего слоя, причем сигнал возбуждения вызывает деформацию, по меньшей мере, одного из первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов, в ответ на обнаружение события.
[11] Сигнал возбуждения содержит первый сигнал возбуждения и второй сигнал возбуждения, по меньшей мере, одно из первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов содержит первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов, первое множество пьезоэлектрических материалов деформируется в первом направлении в ответ на прикладывание первого сигнала возбуждения к первому множеству пьезоэлектрических материалов нижнего пьезоэлектрического слоя, а второе множество пьезоэлектрических материалов деформируется во втором направлении в ответ на прикладывание второго сигнала возбуждения ко второму множеству пьезоэлектрических материалов верхнего пьезоэлектрического слоя, и первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов поддерживают сбалансированное состояние в ответ на прикладывание первого сигнала возбуждения или второго сигнала возбуждения к первому множеству пьезоэлектрических материалов и второму множеству пьезоэлектрических материалов.
[12] Контроллер разделяет первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов на множество групп на основе местоположений, в которых располагаются первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов, и прикладывает различные из первого сигнала возбуждения и второго сигнала возбуждения к соответствующим группам, чтобы вызывать локальную деформацию сгруппированных первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов.
[13] Гибкое устройство дополнительно может включать в себя дисплей. Первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов располагаются в нижней части дисплея, контроллер избирательно прикладывает первый сигнал возбуждения и второй сигнал возбуждения к первому множеству пьезоэлектрических материалов и второму множеству пьезоэлектрических материалов на основе типа события, и контроллер управляет дисплеем таким образом, чтобы отображать пользовательский интерфейс (UI), соответствующий состоянию деформации гибкого корпуса, соответствующему деформации первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов, на дисплее.
[14] Гибкое устройство дополнительно может включать в себя дисплей, по меньшей мере, один биодатчик, сконфигурированный с возможностью обнаруживать касание пользователя, размещаемый на нижней стороне дисплея. Первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов располагаются между дисплеем и, по меньшей мере, одним биодатчиком, и контроллер избирательно прикладывает первый сигнал возбуждения и второй сигнал возбуждения к первому множеству пьезоэлектрических материалов и второму множеству пьезоэлектрических материалов и управляет дисплеем таким образом, чтобы отображать пользовательский интерфейс на дисплее в ответ на обнаружение касания пользователя, по меньшей мере, посредством одного биодатчика.
[15] Первое множество пьезоэлектрических материалов располагается в направлении по столбцам, и второе множество пьезоэлектрических материалов располагается в направлении по строкам.
[16] Нижний пьезоэлектрический слой, промежуточный слой и верхний пьезоэлектрический слой укладываются последовательно на одной стороне гибкого корпуса.
[17] Величина сигнала возбуждения соответствует степени деформации, по меньшей мере, одного из первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов.
[18] Гибкое устройство дополнительно может включать в себя детектор, сконфигурированный с возможностью обнаруживать электрический сигнал, сформированный из одного или более пьезоэлектрических материалов из первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов в ответ на деформацию гибкого корпуса. Контроллер определяет состояние деформации гибкого корпуса на основе изменения в электрическом сигнале и выполняет операцию управления, соответствующую определенному состоянию деформации.
[19] Согласно аспекту примерного варианта осуществления, предусмотрен способ для работы гибкого устройства, который может включать в себя обнаружение, посредством контроллера гибкого устройства, возникновения события и избирательное прикладывание сигналов возбуждения к первому множеству пьезоэлектрических материалов нижнего пьезоэлектрического слоя, расположенного на гибком корпусе гибкого устройства, и ко второму множеству пьезоэлектрических материалов верхнего пьезоэлектрического слоя, расположенного на первом множестве пьезоэлектрических материалов, на основе события. Сигналы возбуждения вызывают деформацию первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов.
Преимущества изобретения
[20] Согласно аспектам примерных вариантов осуществления, можно деформировать гибкое устройство с использованием множества пьезоэлектрических материалов. Как результат, дополнительно повышается эффективность использования гибкого устройства.
Краткое описание чертежей
[21] Вышеуказанные и другие аспекты должны становиться более очевидными посредством описания конкретных примерных вариантов осуществления со ссылкой на прилагаемые чертежи, на которых:
[22] Фиг. 1 иллюстрирует конструкцию гибкого устройства согласно примерному варианту осуществления;
[23] Фиг. 2 является видом в поперечном сечении гибкого устройства по фиг. 1;
[24] Фиг. 3-5 иллюстрируют структуру одного пьезоэлектрического вещества согласно различным примерным вариантам осуществления;
[25] Фиг. 6 является видом, предоставленным для того, чтобы пояснять изгиб пьезоэлектрического вещества в ответ на первый сигнал возбуждения, прикладываемый к нему;
[26] Фиг. 7 является видом, предоставленным для того, чтобы пояснять изгиб пьезоэлектрического вещества в ответ на второй сигнал возбуждения, прикладываемый к нему;
[27] Фиг. 8 и 9 являются видами, предоставленными для того, чтобы пояснять то, как гибкое устройство изменяет форму в ответ на изгиб пьезоэлектрического вещества;
[28] Фиг. 10 является видом, предоставленным для того, чтобы пояснять ситуацию, когда идентичный сигнал возбуждения прикладывается к верхнему пьезоэлектрическому слою и нижнему пьезоэлектрическому слою пьезоэлектрического вещества;
[29] Фиг. 11 и 12 являются видами, предоставленными для того, чтобы пояснять конструкцию, чтобы прикладывать сигнал возбуждения к пьезоэлектрическому веществу;
[30] Фиг. 13 и 14 являются видами, предоставленными для того, чтобы пояснять пример электродного рисунка, соединенного с множеством пьезоэлектрических веществ;
[31] Фиг. 15 является блок-схемой, предоставленной для того, чтобы пояснять конструкцию гибкого устройства согласно примерному варианту осуществления;
[32] Фиг. 16-20 являются видами, предоставленными для того, чтобы пояснять изменение форм гибкого устройства согласно различным примерным вариантам осуществления;
[33] Фиг. 21 является видом, предоставленным для того, чтобы пояснять работу гибкого устройства, отображающего UI в форме часов;
[34] Фиг. 22 является видом, предоставленным для того, чтобы пояснять структуру пьезоэлектрического вещества, дополнительно включающего в себя биодатчик;
[35] Фиг. 23 является видом, предоставленным для того, чтобы пояснять рисунок компоновки множества пьезоэлектрических веществ;
[36] Фиг. 24 иллюстрирует поперечное сечение гибкого устройства по фиг. 23;
[37] Фиг. 25 иллюстрирует рисунок компоновки множества пьезоэлектрических веществ согласно другому примерному варианту осуществления;
[38] Фиг. 26 иллюстрирует поперечное сечение гибкого устройства по фиг. 25;
[39] Фиг. 27 является блок-схемой последовательности операций, предоставленной для того, чтобы пояснять способ работы для изменения формы гибкого устройства с использованием множества пьезоэлектрических веществ;
[40] Фиг. 28 является блок-схемой, предоставленной для того, чтобы пояснять конструкцию гибкого устройства согласно различным примерным вариантам осуществления;
[41] Фиг. 29 является видом, предоставленным для того, чтобы пояснять структуру программного обеспечения, используемого в гибком устройстве; и
[42] Фиг. 30 является блок-схемой последовательности операций, предоставленной для того, чтобы пояснять способ работы для управления работой гибкого устройства посредством считывания измененной формы гибкого устройства с использованием множества пьезоэлектрических веществ.
Оптимальный режим осуществления изобретения
Режим осуществления изобретения
[44] Далее подробнее описываются конкретные примерные варианты осуществления со ссылкой на прилагаемые чертежи.
[45] В нижеприведенном описании, идентичные ссылки с номерами на чертежах используются для идентичных элементов на различных чертежах. Аспекты, указываемые в описании, такие как детальная конструкция и элементы, предоставляются для того, чтобы помогать в исчерпывающем понимании идеи настоящего изобретения. Соответственно, очевидно, что примерные варианты осуществления могут быть выполнены без этих конкретно заданных аспектов. Кроме того, хорошо известные функции и структуры не описываются подробно, поскольку они могут затруднять понимание изобретения излишними подробностями.
[46] Фиг. 1 является видом, предоставленным для того, чтобы пояснять конструкцию гибкого устройства согласно примерному варианту осуществления. Ссылаясь на фиг. 1, гибкое устройство 1000 включает в себя корпус 100 и множество пьезоэлектрических веществ 110-1~110-n.
[47] Соответствующие компоненты гибкого устройства 100 монтируются на корпусе, который является гибким и может быть деформирован.
[48] Корпус может изготавливаться из пластикового материала (например, полимерной пленки), который может деформироваться в ответ на внешнее давление. Конкретно, корпус 100 может быть сконфигурирован как несущая пленка, покрытая на обеих поверхностях барьерным покрытием. Несущая пленка может формироваться из различной смолы, такой как, например, полиимид (PI), поликарбонат (PC), полиэтилентерефталат (PET), полиэфирсульфон (PES), полиэтиленнафталат (PEN) или волокнит (FRP). Барьерное покрытие может применяться на обеих поверхностях несущей пленки, соответственно. Органическая или неорганическая пленка может использоваться в качестве барьерного покрытия для того, чтобы поддерживать гибкость. Кроме того, корпус 100 может формироваться из различных других материалов, демонстрирующих гибкость, таких как, например, металлическая фольга и т.д.
[49] Множество пьезоэлектрических материалов 110-1~110-n может монтироваться на поверхности или внутри корпуса 100. Конкретно, множество пьезоэлектрических материалов 110-1~110-n может размещаться в различных позициях корпуса 100. Фиг. 1 иллюстрирует пример, в котором множество пьезоэлектрических материалов 110-1~110-n формируются с предварительно определенными интервалами на одной поверхности корпуса 100 в горизонтальных и вертикальных строках, за счет этого формируя матричный рисунок. Хотя пьезоэлектрические материалы 110-1~110-n в примерном варианте осуществления, проиллюстрированном на фиг. 1, проиллюстрированы с постоянными интервалами друг от друга, число, местоположения и рисунок компоновки пьезоэлектрических материалов 110-1~110-n не ограничены каким-либо конкретным примером и могут модифицироваться различными способами в зависимости от варианта применения.
[50] Может размещаться множество пьезоэлектрических материалов 110-1~110-n, при этом размещаются два различных пьезоэлектрических слоя. Для удобства пояснения, пьезоэлектрический слой в верхней части упоминается в качестве "верхнего пьезоэлектрического слоя", в то время как пьезоэлектрический слой под верхним пьезоэлектрическим слоем упоминается в качестве "нижнего пьезоэлектрического слоя".
[51] Гибкое устройство 1000 использует пьезоэлектрический эффект соответствующих пьезоэлектрических материалов 110-1~110-n. Иными словами, когда пользователь прикладывает давление посредством деформации корпуса 100, имеющего пьезоэлектрические материалы 110-1~110-n, соответствующие пьезоэлектрические материалы 110-1~110-n подвергаются диэлектрической поляризации вследствие приложенного давления и за счет этого формируют электрические сигналы. Следовательно, возникает прямой пьезоэлектрический эффект или первый пьезоэлектрический эффект. Наоборот, при приложении электрического поля к соответствующим пьезоэлектрическим материалам 110-1~110-n, форма пьезоэлектрических материалов 110-1~110-n изменяется вследствие электрического поля, и это представляет собой обратный пьезоэлектрический эффект или второй пьезоэлектрический эффект. Эффекты, упомянутые выше, совместно упоминаются в качестве "пьезоэлектрического эффекта". Согласно примерному варианту осуществления, проиллюстрированному на фиг. 1, гибкое устройство 1000 может изменять форму корпуса 100 посредством использования пьезоэлектрического эффекта или, более конкретно, любой комбинации первого пьезоэлектрического эффекта и второго пьезоэлектрического эффекта.
[52] Фиг. 2 иллюстрирует поперечное сечение гибкого устройства 1000 согласно варианту осуществления. Ссылаясь на фиг. 2, гибкое устройство 1000 включает в себя дисплей 120. Дисплей 120 включает в себя первый защитный слой 121, панель 122 отображения, формирователь 123 сигналов управления, блок 124 задней подсветки и подложку 125.
[53] Первый защитный слой 121 защищает панель 122 отображения. Например, первый защитный слой 121 может формироваться из такого материала, как ZrO, CeO2 или ThO2. Первый защитный слой 121 может формироваться в качестве прозрачной пленки, чтобы покрывать всю поверхность панели 122 отображения.
[54] Панель 122 отображения может быть реализована как жидкокристаллический дисплей (ЖК-дисплей), дисплей на органических светоизлучающих диодах (OLED), электрофоретический дисплей (EPD), электрохромный дисплей (ECD) или плазменная панель отображения (PDP). Для реализации в качестве ЖК-дисплея, требуется блок 124 задней подсветки, как проиллюстрировано на фиг. 2. Блок 124 задней подсветки может включать в себя источник света, такой как лампы или светодиод, в компоновке с прямыми краями, чтобы предоставлять заднюю подсветку в направлении панели 122 отображения.
[55] Формирователь 123 сигналов управления возбуждает панель 122 отображения. Конкретно, формирователь 123 сигналов управления прикладывает напряжение возбуждения к множеству пикселов панели 122 отображения. Формирователь 123 сигналов управления может быть реализован как тонкопленочный транзистор (TFT), TFT на основе низкотемпературного поликристаллического кремния (LTPS) или органический TFT (OTFT). Формирователь 123 сигналов управления может принимать различные конфигурации согласно тому, как формируется панель 122 отображения. Например, панель 122 отображения может включать в себя органический излучатель света из множества пиксельных ячеек и электродных слоев, покрывающих обе поверхности органического излучателя света. Формирователь 123 сигналов управления может включать в себя множество транзисторов, соответствующих надлежащим пиксельным ячейкам панели 122 отображения. Соответствующие транзисторы освещают пиксельные ячейки, соединенные с ними, при прикладывании электрического сигнала к ним. Как результат, изображение отображается на панели 122 отображения. Хотя не проиллюстрировано на фиг. 2, дополнительно может предоставляться цветной светофильтр. Соответствующие компоненты иллюстрируются на фиг. 2, изготовлены как органическая структура, содержащая углерод, или тонкая гибкая структура, такая как фольга.
[56] Дисплей 120 альтернативно может быть реализован как электрическая бумага (электронная бумага). Электронная бумага может быть реализована с использованием полусферических закручивающихся шаров, заряжаемых с помощью электростатического заряда, способа электрофоретического отображения с использованием электрофореза и микрокапсулы или способа отображения с использованием холестерического жидкого кристалла.
[57] Подложка 125 поддерживает компоненты. Подложка 125 может представлять собой пластиковую подложку, сформированную из различного материала, включающего в себя, например, полиимид (PI), поликарбонат (PC), полиэтилентерефталат (PET), полиэфирсульфон (PES), полиэтиленнафталат (PEN) или волокнит (FRP).
[58] Множество пьезоэлектрических материалов 110-1~110-n размещается под подложкой 125 в различных конфигурациях.
[59] Пьезоэлектрические материалы 110-1~110-n покрываются посредством второго защитного слоя 126. Второй защитный слой 126 может формироваться из гибкого материала, такого как резина или пластмасса. Хотя примерный вариант осуществления, проиллюстрированный на фиг. 2, показывает второй защитный слой 126, заполняющий зазоры между пьезоэлектрическими материалами 110-1~110-n, в другом примерном варианте осуществления, зазоры между пьезоэлектрическими материалами 110-1~110-n, можно оставляться в качестве пустых пространств.
[60] Пьезоэлектрические материалы 110-1~110-n могут формироваться с различными конфигурациями, такими как, например, униморфная, биморфная или пакетированная. "Униморфная" означает конфигурацию, в которой один пьезоэлектрический слой укладывается на дискообразном металлическом слое. "Биморфная" означает конфигурацию, в которой два пьезоэлектрических слоя укладываются последовательно. "Пакетированная" означает конфигурацию, в которой металлический электродный материал печатается на керамической пластине, после чего сжимаются несколько пластин, и сжатая структура, включающая в себя электрод, спекается.
[61] Фиг. 3 иллюстрирует поперечное сечение униморфного пьезоэлектрического материала. Ссылаясь на фиг. 3, униморфный пьезоэлектрический материал 110 включает в себя металлический слой 112 и пьезоэлектрический слой 111, укладываемый на поверхности металлического слоя 112. При виде сверху металлический слой 112 и пьезоэлектрический слой 111 могут иметь круглую конфигурацию. Пьезоэлектрический слой 111 может формироваться из пьезоэлектрической керамики или пьезоэлектрического полимера. Для пьезоэлектрической керамики, применимыми являются различные материалы, такие как PZT, PbTiO3, BaTiO3.
[62] При прикладывании сигнала возбуждения первой полярности к пьезоэлектрическому слою 111, как проиллюстрировано, краевая область перемещается вверх, в то время как центральная область перемещается вниз. При прикладывании сигнала возбуждения второй полярности, которая является противоположной первой полярности, форма изменяется противоположным способом.
[63] Фиг. 4 показывает поперечное сечение биморфного пьезоэлектрического материала. Ссылаясь на фиг. 4, биморфный пьезоэлектрический материал 110 включает в себя верхний пьезоэлектрический слой 111 и нижний пьезоэлектрический слой 113. Верхний и нижний пьезоэлектрические слои 111, 113 расширяются при прикладывании сигнала возбуждения первой полярности, в то время как они сжимаются при прикладывании сигнала возбуждения второй полярности. Первая полярность может быть положительной (+), а вторая полярность может быть отрицательной (-). Пьезоэлектрический материал 110 изгибается в направлении второго пьезоэлектрического слоя 113, когда расширяется первый пьезоэлектрический слой 111, и сжимается второй пьезоэлектрический слой 113. Наоборот, пьезоэлектрический материал 110 изгибается в направлении первого пьезоэлектрического слоя 111, когда сжимается первый пьезоэлектрический слой 111, и расширяется второй пьезоэлектрический слой 113.
[64] Фиг. 5 иллюстрирует другой пример конструкции биморфного пьезоэлектрического материала. Ссылаясь на фиг. 5, промежуточный слой 114 может предоставляться между верхним и нижним пьезоэлектрическими слоями 111, 113 в пьезоэлектрическом материале 110.
[65] Промежуточный слой 112 может формироваться из гибкого упругого материала. Промежуточный слой 112 может иметь форму прямоугольного параллелепипеда с небольшой толщиной. Верхний пьезоэлектрический слой 111 укладывается на верхней поверхности промежуточного слоя 112, и нижний пьезоэлектрический слой 113 укладывается на нижней поверхности промежуточного слоя 112. Как пояснено выше, верхний и нижний пьезоэлектрические слои 111, 113 могут формироваться из различных пьезоэлектрических материалов. Ссылаясь на фиг. 5, верхний и нижний пьезоэлектрические слои 111, 113 могут быть сконфигурированы с возможностью частично покрывать промежуточный слой 114. Иными словами, промежуточный слой 113 может формироваться таким образом, что он имеет большую длину. Длины соответствующих пьезоэлектрических слоев 111, 113 и промежуточного слоя 114 могут определяться на основе данных, измеренных посредством экспериментов.
[66] Например, частота и смещение согласно длине промежуточного слоя 114 могут быть измерены следующим образом посредством эксперимента.
[67]
[68]
[69] Таблица 1 перечисляет смещения, измеренные посредством варьирования длины промежуточного слоя 114 до 80, 90, 100, 110, 120 мм в состоянии, в котором каждый конец пьезоэлектрических слоев 111, 113 и промежуточного слоя 114 совмещаются друг с другом, и длины пьезоэлектрических слоев 111, 113 задаются фиксированно равными 30 мм. Согласно таблице 1, измерено максимальное смещение, когда длина промежуточного слоя 114 составляет 100 мм, что меньше максимальной длины (т.е. 120 мм). "Смещение" означает ширину δ другого конца промежуточного слоя 114, деформированного в направлении вверх и вниз.
[70] Смещение может выражаться посредством следующей математической формулы.
[71] Математическая формула 1
[72] δ=k⋅d31⋅V⋅l2⋅/t2,
[73]
[74] где δ обозначает смещение, k является целым числом, d31 является пьезоэлектрической постоянной, V представляет собой приложенное напряжение, l является длиной пьезоэлектрического слоя, и t является толщиной. Согласно математической формуле 1, смещение δ увеличивается пропорционально приложенному напряжению, т.е. сигналу возбуждения.
[75] Хотя фиг. 5 иллюстрирует то, что промежуточный слой 114 больше пьезоэлектрических слоев 111, 113, в другом примерном варианте осуществления длины промежуточного слоя 114 и пьезоэлектрических слоев 111, 113 могут быть одинаковыми. Дополнительно, направление изгиба пьезоэлектрического материала 110 может определяться согласно разности напряжений между первым сигналом возбуждения, прикладываемым к верхнему пьезоэлектрическому слою 111, и вторым сигналом возбуждения, прикладываемым к нижнему пьезоэлектрическому слою 114.
[76] Ниже поясняется способ для регулирования направления деформации пьезоэлектрического материала 110, включающего в себя верхний пьезоэлектрический слой 111, промежуточный слой 114 и нижний пьезоэлектрический слой 113 с одинаковой длиной, со ссылкой на фиг. 6 и 7.
[77] Сначала ссылаясь на фиг. 6, первый сигнал V1 возбуждения прикладывается к верхнему пьезоэлектрическому слою 111, и второй сигнал V2 возбуждения прикладывается к нижнему пьезоэлектрическому слою 113. Верхний пьезоэлектрический слой 111 расширяется, а нижний пьезоэлектрический слой 113 сжимается, когда первый сигнал V1 возбуждения является положительным (+), а второй сигнал V2 возбуждения является отрицательным (-). Как результат, пьезоэлектрический материал 110 изгибается в первом направлении. Пьезоэлектрический материал 110 может изгибаться в первом направлении, даже когда V1 и V2 имеют идентичную полярность, если V1 превышает V2.
[78] Фиг. 7 иллюстрирует ситуацию, когда V1 и V2 прикладываются в направлении, противоположном направлению, проиллюстрированному на фиг. 6. Согласно фиг. 7, пьезоэлектрический материал 110 изгибается во втором направлении, которое является противоположным первому направлению.
[79] Когда изгибается пьезоэлектрический материал 110, как проиллюстрировано на фиг. 6 и 7, также изгибается корпус 110 гибкого устройства 1000, к которому присоединен пьезоэлектрический материал 110.
[80] Фиг. 8 иллюстрирует случай, в котором корпус 100 изгибается в первом направлении, когда пьезоэлектрические материалы 110-1~110-n, смонтированные на корпусе 100, изгибаются в первом направлении, как проиллюстрировано на фиг. 6. С другой стороны фиг. 9 иллюстрирует случай, в котором корпус 100 изгибается во втором направлении, когда пьезоэлектрические материалы 110-1~110-n, смонтированные на корпусе 100, изгибаются во втором направлении, как проиллюстрировано на фиг. 7.
[81] Между тем, верхний и нижний пьезоэлектрические слои 111, 113 имеют идентичный пьезоэлектрический эффект, когда идентичный сигнал возбуждения прикладывается к верхнему и нижнему пьезоэлектрическим слоям 111, 113.
[82] Фиг. 10 иллюстрирует случай, в котором прикладывается идентичный сигнал возбуждения. Ссылаясь на фиг. 10, соответствующие пьезоэлектрические материалы 110 поддерживают сбалансированное состояние и расширяются в длину, когда первый сигнал V1 возбуждения положительной полярности прикладывается к верхнему и нижнему пьезоэлектрическим слоям 111, 113. Соответственно, снижается зазор (g) между соответствующими пьезоэлектрическими материалами, как проиллюстрировано на фиг. 10, за счет этого создавая сжимающий эффект и упрочняя корпус 100 гибкого устройства 1000.
[83] Фиг. 11 и 12 являются видами, предоставленными для того, чтобы пояснять различные примеры структуры для того, чтобы прикладывать сигнал возбуждения биморфного пьезоэлектрического материала.
[84] Ссылаясь на фиг. 11, пьезоэлектрический материал 110 включает в себя верхний пьезоэлектрический слой 111, промежуточный слой 114, нижний пьезоэлектрический слой 113, первый электрод 115-1, расположенный на верхней поверхности верхнего пьезоэлектрического слоя 111, второй электрод 115-2, расположенный между верхним пьезоэлектрическим слоем 111 и промежуточным слоем 114, третий электрод 115-3, расположенный между промежуточным слоем 114 и нижним пьезоэлектрическим слоем 113, и четвертый электрод 115-4, расположенный на нижней поверхности нижнего пьезоэлектрического слоя 113.
[85] Ссылаясь на фиг. 11, электрическое поле положительной полярности формируется на верхнем пьезоэлектрическом слое 111, когда положительное напряжение прикладывается к первому и четвертому электродам 115-1, 115-4, и отрицательное напряжение прикладывается ко второму и третьему электродам 115-2, 115-3. Как результат, пьезоэлектрическое вещество в верхнем пьезоэлектрическом слое 111 поляризуется согласно направлению электрического поля, и увеличивается длина кристаллов. Иными словами, верхний пьезоэлектрический слой 111 расширяется в длину. Наоборот, электрическое поле отрицательной полярности формируется на нижнем пьезоэлектрическом слое 113. Соответственно, нижний пьезоэлектрический слой 113 сжимается в длину. Как результат, пьезоэлектрический материал 110 изгибается в направлении нижнего пьезоэлектрического слоя 113, как проиллюстрировано на фиг. 11.
[86] Фиг. 12 иллюстрирует компоновку, в которой электроды предоставляются на верхней и нижней сторонах пьезоэлектрического материала 110. Ссылаясь на фиг. 12, пьезоэлектрический материал 110 включает в себя верхний пьезоэлектрический слой 111, промежуточный слой 114, нижний пьезоэлектрический слой 113, первый электрод 116-1, расположенный на верхней поверхности верхнего пьезоэлектрического слоя 111, и второй электрод 116-2, расположенный на нижней поверхности нижнего пьезоэлектрического слоя 113. Соответственно, когда положительный сигнал прикладывается к первому электроду 116-1, а отрицательный сигнал прикладывается ко второму электроду 116-2, верхний пьезоэлектрический слой 111 расширяется, а нижний пьезоэлектрический слой 113 сжимается, так что пьезоэлектрический материал 110 изгибается вниз.
[87] Электродный рисунок может предоставляться для того, чтобы прикладывать отдельный сигнал возбуждения к верхнему и нижнему пьезоэлектрическим слоям, соответственно. Электродный рисунок электрически соединяет электроды, соединенные с верхним и нижним пьезоэлектрическими слоями, с внутренней схемой питания гибкого устройства 1000. Электродный рисунок может формироваться в нижней части подложки 125, как пояснено выше, или на втором защитном слое 126. Альтернативно, электродный рисунок может предоставляться в подложке 125, когда множество пьезоэлектрических материалов 110-1~110-n встраивается в подложку 125.
[88] Фиг. 13 иллюстрирует электродный рисунок согласно примерному варианту осуществления. Ссылаясь на фиг. 13, гибкое устройство 1000 включает в себя верхние электродные рисунки 117-1, 117-3, 117-5, соединенные с верхним пьезоэлектрическим слоем 111 каждого из пьезоэлектрических материалов 110-1~110-n, и нижние электродные рисунки 117-2, 117-4, 117-6, соединенные с нижним пьезоэлектрическим слоем 113 каждого из пьезоэлектрических материалов 110-1~110-n.
[89] Верхние электродные рисунки 117-1, 117-3, 117-5 и нижние электродные рисунки 117-2, 117-4, 117-6, в общем, соединяют пьезоэлектрические материалы, размещаемые в идентичных строках. Иными словами, первый верхний электродный рисунок 117-1, в общем, соединяется с нижними пьезоэлектрическими слоями 113 первого, четвертого и седьмого пьезоэлектрических материалов 110-1, 110-4, 110-7, размещаемых в первой строке. Аналогично, пьезоэлектрические материалы, размещаемые в оставшихся строках, также, в общем, соединяются посредством верхних и нижних электродных рисунков, соответствующих строкам пьезоэлектрических материалов.
[90] Верхние и нижние электродные рисунки 117-1, 117-3, 117-5 и 117-2, 117-4, 117-6 соединяются с электродными контактными площадками 118-1~118-6. Соответственно, когда сигнал возбуждения прикладывается к одной электродной контактной площадке, идентичный сигнал возбуждения может предоставляться в пьезоэлектрические материалы, которые, в общем, соединяются с электродным рисунком, соединенным с электродной контактной площадкой, при приеме сигнала возбуждения.
[91] Фиг. 13 иллюстрирует ситуацию, когда пьезоэлектрические материалы реализованы в многослойной структуре. В одном примерном варианте осуществления, верхние электродные рисунки 117-1, 117-3, 117-5 могут формироваться на слое, идентичном слою верхнего пьезоэлектрического слоя 111, и нижние электродные рисунки 117-2, 117-4, 117-6 могут формироваться на слое, идентичном слою нижнего пьезоэлектрического слоя 113. Иными словами, верхние электродные рисунки 117-1, 117-3, 117-5 могут формироваться на более высоком слое относительно нижних электродных рисунков 117-2, 117-4, 117-6, как проиллюстрировано на фиг. 13, на котором верхние электродные рисунки 117-1, 117-3, 117-5 проиллюстрированы с помощью сплошных линий, а нижние электродные рисунки 117-2, 117-4, 117-6, проиллюстрированы с помощью пунктирных линий. В зависимости от варианта применения, проникающий электрод может проходить через слои.
[92] В дополнение к примерному варианту осуществления, проиллюстрированному на фиг. 13, в котором множество пьезоэлектрических материалов размещаются в матричном рисунке и возбуждаются по строкам, возможны альтернативные варианты осуществления. Например, множество пьезоэлектрических материалов может быть возбуждено по столбцам, причем в этом случае дополнительно могут предоставляться верхние электродные рисунки (не проиллюстрированы) для того, чтобы, в общем, соединять верхние пьезоэлектрические слои (например, первый, второй и третий), размещаемые в столбцах, и нижние электродные рисунки (не проиллюстрированы) для того, чтобы, в общем, соединять нижние пьезоэлектрические слои пьезоэлектрических материалов, размещаемых в столбцах. Дополнительная иллюстрация и пояснение в отношении постолбцовых электродных рисунков опускается для краткости, поскольку специалисты в данной области техники должны легко понимать компоновку электродных рисунков на основе построчного верхнего и нижнего электродного рисунка. Хотя фиг. 13 иллюстрирует только три верхних электродных рисунка, в зависимости от вариантов осуществления, число электродных рисунков может варьироваться согласно числу пьезоэлектрических материалов.
[93] Дополнительно, хотя фиг. 13, в частности, иллюстрирует пример, в котором множество пьезоэлектрических материалов в построчной или постолбцовой компоновке равномерно возбуждаются, пьезоэлектрические материалы могут возбуждаться в качестве определенной единицы пьезоэлектрического материала.
[94] Фиг. 14 иллюстрирует электродный рисунок для того, чтобы возбуждать единицу пьезоэлектрического материала согласно варианту осуществления.
[95] Ссылаясь на фиг. 14, множество верхних электродных рисунков 117-1a, 117-1b, 117-1c, 117-3a, 117-3b, 117-3c, 117-5a, 117-5b, 117-5c по отдельности соединяются с верхним пьезоэлектрическим слоем каждого пьезоэлектрического материала. Дополнительно, множество нижних электродных рисунков 117-2a, 117-2b, 117-2c, 117-4a, 117-4b, 117-4c, 117-6a, 117-6b, 117-6c по отдельности соединяются с нижним пьезоэлектрическим слоем каждого пьезоэлектрического материала. Дополнительно, верхний и нижний электродные рисунки соединяются с соответствующими электродными контактными площадками 118-1a, 118-1b, 118-1c, 118-2a, 118-2b, 118-2c, 118-3a, 118-3b, 118-3c, 118-4a, 118-4b, 118-4c, 118-5a, 118-5b, 118-5c, 118-6a, 118-6b, 118-6c. Гибкое устройство 1000 может деформировать корпус 100 в требуемое состояние посредством прикладывания сигнала возбуждения к электродным контактным площадкам, соединенным с пьезоэлектрическими материалами в местоположении, предназначенном для деформации. Ниже подробнее поясняется операция деформации.
[96] Фиг. 15 является блок-схемой гибкого устройства согласно примерному варианту осуществления. Ссылаясь на фиг. 15, гибкое устройство 1000 включает в себя множество пьезоэлектрических материалов 110-1~110-n, дисплей 120, контроллер 130, устройство 140 хранения данных, формирователь 150 сигналов управления и шину 160.
[97] Структура и способ для возбуждения множества пьезоэлектрических материалов 110-1~110-n более не поясняются, а ссылаются на вышеуказанное соответствующее описание.
[98] Дисплей 120 формируется из гибкого материала и выполняет различные операции отображения под управлением контроллера 130.
[99] Формирователь 150 сигналов управления сконфигурирован с возможностью прикладывать сигнал возбуждения ко множеству пьезоэлектрических материалов 110-1~110-n. Формирователь 150 сигналов управления может формировать сигналы возбуждения с различными значениями и полярностями, с использованием питания, предоставленного в аккумулятор (не проиллюстрирован). Сигнал возбуждения может формироваться в форме импульсного сигнала.
[100] Устройство 140 хранения данных сохраняет операционную систему (ОС), которая управляет работой гибкого устройства 100, приложения и другие данные. Контроллер 130 возбужден посредством ОС, сохраненной в устройстве 140 хранения данных для того, чтобы выполнять различные приложения.
[101] Шина 160 сконфигурирована с возможностью передавать и принимать данные или управляющий сигнал между соответствующими компонентами гибкого устройства 1000. Шина 160 может включать в себя адресную шину, шину данных или шину управления. Адресная шина используется для того, чтобы передавать и принимать связанную с адресом информацию, такую как адрес ячейки запоминающего устройства, и шина данных представляет собой систему шин, которая соединяет контроллер 130, устройство 140 хранения данных и другие устройства ввода-вывода для обмена данными. Шина представляет собой систему шин, используемую посредством контроллера 130, устройства 140 хранения данных или других компонентов для того, чтобы передавать или принимать различные управляющие сигналы. Управляющий сигнал может включать в себя сигнал синхронизации запоминающего устройства, сигнал синхронизации ввода-вывода, сигнал управления возбуждением, сигнал состояния CPU, сигнал запроса и разрешения прерывания или синхросигнал.
[102] Контроллер 130 полностью управляет работой гибкого устройства 1000 согласно действию пользователя. Конкретно, после приема команды включения, контроллер 130 может выполнять программу инициализации, чтобы загружать гибкое устройство 1000, и отображает фоновый экран через дисплей 120. Фоновый экран может включать в себя значки для различных функций, приложений или папок. Когда пользователь выбирает один из значков, контроллер 130 выполняет соответствующую операцию согласно выбранному значку.
[103] Когда возникает предварительно установленное событие, контроллер 130 может управлять формирователем 150 сигналов управления таким образом, чтобы прикладывать сигнал возбуждения, по меньшей мере, к одному из множества пьезоэлектрических материалов 110-1~110-n. Конкретно, контроллер 130 может предоставлять в формирователь 150 сигналов управления сигнал адресации для того, чтобы обозначать пьезоэлектрический материал, который должен быть возбужден из числа соответствующих пьезоэлектрических материалов 110-1~110-n, через адресную шину, а также предоставляет в формирователь 150 сигналов управления управляющий сигнал для того, чтобы обозначать порядок возбуждения через шину управления.
[104] Формирователь 150 сигналов управления последовательно прикладывает сигнал возбуждения к пьезоэлектрическому материалу, как указано посредством сигнала адресации, в соответствии с управляющим сигналом. Формирователь 150 сигналов управления может определять точку возбуждения соответствующих пьезоэлектрических материалов на основе синхросигналов.
[105] Пьезоэлектрические материалы при приеме сигнала возбуждения изгибаются в предварительно определенном направлении согласно характеристике сигнала возбуждения, и как результат, также изгибается область корпуса 100, в которой расположены соответствующие пьезоэлектрические материалы. Соответственно, корпус 100 изменяет форму.
[106] Как пояснено выше, пьезоэлектрические материалы 110-1~110-n могут размещаться в различных рисунках в корпусе 100. В отношении местоположений соответствующих пьезоэлектрических материалов 110-1~110-n во всей области гибкого устройства, контроллер 130 может разделять множество пьезоэлектрических материалов на множество групп. Например, ссылаясь на фиг. 13, когда пьезоэлектрические материалы 110-1~110-n размещаются во множестве столбцов и строк, пьезоэлектрические материалы могут группироваться в столбцах или строках. Контроллер 130 локально деформирует гибкое устройство 1000 посредством прикладывания различных сигналов возбуждения к соответствующим группам.
[107] Местоположение, направление или степень деформации может варьироваться в зависимости от типов событий. Событие может включать в себя событие для того, чтобы выполнять конкретное приложение, событие для того, чтобы включать питание гибкого устройства 1000, событие, при котором пользователь выбирает меню деформации, событие приема нового текстового сообщения, почтового сообщения, сообщения из средства обмена сообщениями или вызова, событие для того, чтобы формировать информационное сообщение, или событие для того, чтобы формировать сообщение об ошибке.
[108] Например, в отношении компоновки пьезоэлектрических материалов, такой как компоновка пьезоэлектрических материалов, проиллюстрированная на фиг. 13, контроллер 130 может прикладывать соответствующие сигналы возбуждения к первой и второй электродным контактным площадкам 118-1, 118-2, чтобы возбуждать пьезоэлектрические материалы 110-1, 110-4, 110-7, размещаемые в первой строке, с тем чтобы изгибать левую краевую область гибкого устройства 1000 в первом или втором направлении. Соответственно, поскольку пьезоэлектрические материалы 110-1, 110-4, 110-7 в первой строке изгибаются в идентичном направлении, область корпуса 100 изгибается в левом краю, в котором размещаются пьезоэлектрические материалы 110-1, 110-4, 110-7.
[109] Между тем, когда гибкое устройство 1000 включает в себя дисплей 120, как в примере, проиллюстрированном на фиг. 15, контроллер 130 может управлять дисплеем 120 таким образом, чтобы отображать UI-экран, соответствующий деформации корпуса 100, когда деформируется корпус 100. Иными словами, при деформации корпуса 100, включающего в себя дисплей, полностью или частично в предварительно установленную форму посредством прикладывания сигнала возбуждения к пьезоэлектрическим материалам согласно типу события, контроллер 130 может управлять дисплеем 120 таким образом, чтобы отображать определенный тип UI-экрана, подходящего для деформации, чтобы отображать состояние деформации в надлежащем местоположении, размере или цвете.
[110] Хотя фиг. 15 иллюстрирует гибкое устройство, которое включает в себя дисплей 120, определенный тип гибкого устройства 1000 может не включать в себя дисплей 120.
[111] Контроллер 130 может деформировать корпус 100 в различные формы посредством прикладывания различных сигналов возбуждения к соответствующим пьезоэлектрическим материалам 110-1~110-n.
[112] Фиг. 16-20 иллюстрируют деформации гибкого устройства 1000. Ссылаясь на фиг. 16, гибкое устройство 1000 может быть деформировано посредством прокатывания. Контроллер 130 может управлять формирователем 150 сигналов управления таким образом, чтобы прикладывать первый сигнал (V1) возбуждения к верхним пьезоэлектрическим слоям множества пьезоэлектрических материалов 110-1~110-n, размещаемых во всей области гибкого устройства 1000, и прикладывать второй сигнал (V2) возбуждения к нижним пьезоэлектрическим слоям. Соответственно, пьезоэлектрические материалы 110-1~110-n изгибаются в направлении нижних пьезоэлектрических слоев и за счет этого прокатывают оба конца корпуса 100 таким образом, что они вплотную контактируют друг с другом.
[113] Контроллер 130 может регулировать степень деформации гибкого устройства посредством регулирования значения сигнала возбуждения. Иными словами, корпус 100 может прокатываться, когда разность потенциалов между V1 и V2 является большой, но корпус 100 может быть деформирован до степени, проиллюстрированной на фиг. 8, когда уменьшается разность потенциалов. Соответственно, контроллер 130 может определять то, указывает событие прокатывание гибкого устройства 1000, как проиллюстрировано на фиг. 16, или изгиб гибкого устройства 1000 в пределах предварительно определенного радиуса кривизны, как проиллюстрировано на фиг. 8, и соответствующим образом регулирует значение сигнала возбуждения. Формирователь 150 сигналов управления формирует сигнал возбуждения со значением, управляемым посредством контроллера 130, и выводит сформированный сигнал в соответствующие пьезоэлектрические материалы 110-1~110-n.
[114] Фиг. 17 и 18 иллюстрируют пример, в котором гибкое устройство 1000 деформируется по-разному в зависимости от областей. Ссылаясь на фиг. 17, контроллер 130 разделяет область гибкого устройства 1000 на подобласти (a), (b), (c). Контроллер 130 управляет формирователем 150 сигналов управления таким образом, чтобы прикладывать V2 к верхнему пьезоэлектрическому слою и V1 к нижнему пьезоэлектрическому слою для пьезоэлектрических материалов, размещаемых в области (a), в общем, прикладывать V1 как к верхнему, так и к нижнему пьезоэлектрическим слоям для пьезоэлектрических материалов, размещаемых в области (b), и прикладывать V1 к верхнему пьезоэлектрическому слою и V2 к нижнему пьезоэлектрическому слою для пьезоэлектрических материалов, размещаемых в области (c). Как результат, область (a) изгибается в первом направлении, область (b) поддерживает баланс, и область (c) изгибается во втором направлении.
[115] Фиг. 19 иллюстрирует другой пример гибкого устройства 1000, использующего локальную деформацию. Ссылаясь на фиг. 19, контроллер 130 разделяет всю область гибкого устройства 1000 на подобласти (a), (b), (c). Контроллер 130 управляет формирователем 150 сигналов управления таким образом, чтобы, в общем, прикладывать идентичный сигнал V1 возбуждения к верхнему и нижнему пьезоэлектрическим слоям для пьезоэлектрических материалов, размещаемых в областях (a) и (c), и прикладывать V1 к верхнему пьезоэлектрическому слою и V2 к нижнему пьезоэлектрическому слою для пьезоэлектрических материалов, размещаемых в области (b). Как результат, области (a), (c) поддерживают сбалансированное состояние и в силу этого упрочнены, тогда как область (b) изгибается в первом направлении. Соответственно, гибкое устройство 1000 деформируется в такую форму, как твердый переплет книги.
[116] Фиг. 20 иллюстрирует гибкое устройство 1000, использующее локальную деформацию согласно другому примерному варианту осуществления. Аналогично примерному варианту осуществления, проиллюстрированному на фиг. 19, примерный вариант осуществления по фиг. 20 также, в общем, прикладывает идентичный сигнал (V1) возбуждения к верхнему и нижнему пьезоэлектрическим слоям для пьезоэлектрических материалов, размещаемых в областях (a), (c), при прикладывании V1 к верхнему пьезоэлектрическому слою и V2 к нижнему пьезоэлектрическому слою для пьезоэлектрических материалов, размещаемых в области (b). Отличие от фиг. 19 заключается в том, что разность потенциалов регулируется с понижением для того, чтобы уменьшать степень деформации. Иными словами, поскольку радиус кривизны области (b) на фиг. 20 регулируется таким образом, что он меньше радиуса кривизны области (b) по фиг. 19, гибкое устройство 1000 деформировано в форму, представляющую внешнюю часть переносного компьютера.
[117] Как проиллюстрировано на фиг. 16-20, можно задавать состояние деформации гибкого устройства 1000 согласно приложениям или функциям, чтобы обеспечивать удобство пользователя или повышать удовлетворенность пользователей при пользовании приложениями или функциями. Соответственно, устройство 140 хранения данных может хранить информацию относительно состояния деформации и приложений или информацию настроек, соответствующую состоянию деформации. Контроллер 130 управляет формирователем 150 сигналов управления таким образом, чтобы прикладывать сигнал возбуждения, который соответствует ситуации, на основе информации, сохраненной в устройстве 140 хранения данных.
[118] Например, формирователь 150 сигналов управления управляется таким образом, чтобы реализовывать деформацию, как проиллюстрировано на фиг. 16, когда принимается телефонный вызов, или как проиллюстрировано на фиг. 17, когда выполняется конкретная игровая программа, или как проиллюстрировано на фиг. 18, когда принимается почтовое сообщение или текстовое сообщение. Формирователь 150 сигналов управления также управляется таким образом, чтобы реализовывать деформацию, как проиллюстрировано на фиг. 19, когда выполняется программа для чтения электронных книг или управления галереей, или как проиллюстрировано на фиг. 20, когда выполняется программа текстового процессора.
[119] Контроллер 130 может управлять дисплеем 120 таким образом, чтобы отображать надлежащий экран пользовательского интерфейса (UI) при деформации. Например, когда деформируется гибкое устройство 1000, как проиллюстрировано на фиг. 16, дисплей 120 может отображать UI-экран в форме телефонного приемника или отображать игровой экран с деформацией, такой как деформация, проиллюстрированная на фиг. 17. Дисплей 120 может отображать экран для того, чтобы проверять почтовое сообщение или текстовое сообщение, в области (b) с деформацией, проиллюстрированной на фиг. 18, либо может отображать экран программы для чтения электронных книг или управления галереей с деформацией, проиллюстрированной на фиг. 19. Контроллер 130 может инструктировать дисплею отображать окно ввода слов в области (a) и программную клавиатуру в области (c) с деформацией, проиллюстрированной на фиг. 20. Контроллер 130 может инструктировать дисплею отображать текст, символы или цифры, вводимые через программную клавиатуру, в окне ввода слов. Соответственно, пользователь имеет возможность использовать гибкое устройство 1000 как при использовании переносного компьютера.
[120] Фиг. 21 является видом, предоставленным для того, чтобы пояснять пример использования гибкого устройства 1000 согласно примерному варианту осуществления.
[121] Ссылаясь на фиг. 21, гибкое устройство 1000 является плоским в режиме ожидания. Когда тело (OB) пользователя касается поверхности гибкого устройства 1000, контроллер 130 возбуждает пьезоэлектрические материалы, размещаемые во всей области гибкого устройства 1000, так что гибкое устройство 1000 прокатывается вокруг тела OB пользователя, чтобы имитировать форму наручных часов. Одновременно, контроллер 130 отображает UI в форме часов через дисплей 120. UI в форме часов может отображаться во всей области дисплея 120, или альтернативно, ограниченно отображаться вокруг центра дисплея 120, как проиллюстрировано на фиг. 21.
[122] Хотя примерный вариант осуществления, проиллюстрированный на фиг. 21, иллюстрирует ситуацию, когда гибкое устройство 1000 работает в качестве наручных часов, другие функции являются в равной степени реализуемыми. Например, ссылаясь на фиг. 21, когда тело OB пользователя касается поверхности гибкого устройства 1000, гибкое устройство 1000 может автоматически выполнять функцию MP3-воспроизведения при отображении через дисплей 120 экрана, чтобы указывать состояние воспроизведения. Дополнительно, когда гибкое устройство 1000 включает в себя датчик выполнения тренировочных упражнений, может автоматически выполняться функция отслеживания потраченных калорий, и экран, указывающий выполняемые упражнения, сожженные калории и т.д., измеренные посредством функции отслеживания потраченных калорий, может отображаться через дисплей 120.
[123] Датчик касания или биодатчик может размещаться на задней поверхности гибкого устройства 1000, чтобы обнаруживать касание тела OB пользователя, как проиллюстрировано на фиг. 21.
[124] Фиг. 22 является видом в поперечном сечении, предоставленным для того, чтобы пояснять конструкцию гибкого устройства 1000, включающего в себя биодатчик. Ссылаясь на фиг. 21, гибкое устройство 1000 включает в себя дисплей 120, пьезоэлектрический материал 110 и биодатчик 170. Биодатчик 170 может размещаться на нижней стороне дисплея 120, и пьезоэлектрический материал 110 может размещаться между дисплеем 120 и биодатчиком 170.
[125] Хотя фиг. 21 выше иллюстрирует один пьезоэлектрический материал 110 и дисплей 120, разделенный на слои, для удобства пояснения, в фактической реализации, множество пьезоэлектрических материалов 110 может распределяться по всей области дисплея 120.
[126] Биодатчик 170 размещается под пьезоэлектрическими материалами 110. Биодатчик 170 может представлять собой датчик электрокожной реакции (EDA) или датчик электромускульной реакции (EMG).
[127] Хотя фиг. 22 иллюстрирует биодатчик 170 с размером и в местоположении, идентичном размеру и местоположению промежуточного слоя 114 пьезоэлектрических материалов 110, примерный вариант осуществления не ограничен только конкретными примерами. Соответственно, биодатчик 170 может быть размещен в любом местоположении при условии, что биодатчик 170 является доступным через нижнюю поверхность корпуса 110 гибкого устройства 1000, с тем чтобы непосредственно касаться тела (OB) пользователя. Дополнительно, число и конфигурация биодатчиков 170 может варьироваться в зависимости от назначения конструкции. В одном примерном варианте осуществления, множество биодатчиков 170 может предоставляться с интервалами друг от друга на задней поверхности гибкого устройства 1000.
[128] Контроллер 130 прокатывает гибкое устройство 1000 посредством прикладывания различных сигналов возбуждения к верхнему и нижнему пьезоэлектрическим слоям множества пьезоэлектрических материалов, когда биодатчик 170 считывает касание OB. Когда существует множество биодатчиков 170, гибкое устройство 1000 может прокатываться, когда все или более определенного числа биодатчиков 170 считывают касание OB.
[129] Когда гибкое устройство 1000 прокатывается, контроллер 130 может отображать различные типы UI-экранов, к примеру, UI в форме часов, экран воспроизведения контента, экран индикатора хода воспроизведения или экран счетчика выполнения упражнений, по меньшей мере, в одной области дисплея 120.
[130] Между тем, хотя примерные варианты осуществления, поясненные выше, включают в себя пьезоэлектрические материалы 110-1 – 110-n идентичного размера и формы, и, в частности, размещаемые в идентичном направлении, направление размещения пьезоэлектрических материалов может варьироваться в зависимости от вариантов осуществления.
[131] Фиг. 23 иллюстрирует рисунок компоновки пьезоэлектрических материалов гибкого устройства согласно другому примерному варианту осуществления. Ссылаясь на фиг. 23, корпус 100 включает в себя множество первых пьезоэлектрических материалов 110-H11, 110-H12, 110-H13, 110-H14, 110-H21, 110-H22, 110-H23, 110-H24, 110-H31, 110-H32, 110-H33 и 110-H34, размещаемых в направлении (H1, H2, H3) по столбцам, и множество вторых пьезоэлектрических материалов 110-V11, 110-V12, 110-V21, 110-V22, 110-V31, 110-V32, размещаемых в направлениях (V1, V2, V3) по строкам. Более длинная ось первого пьезоэлектрического материала является ортогональной к более длинной оси второго пьезоэлектрического материала. Соответственно, второй пьезоэлектрический материал не создает помех в работе, когда возбужден первый пьезоэлектрический материал, и возникает деформация в горизонтальном направлении, или наоборот.
[132] Множество первых и вторых пьезоэлектрических материалов может размещаться в идентичном слое. Ссылаясь на фиг. 23, строки (V1, V2, V3), в которых размещаются вторые пьезоэлектрические материалы, могут размещаться между первыми пьезоэлектрическими материалами, чтобы обеспечивать возможность надлежащего соединения между пьезоэлектрическими материалами и электродными рисунками.
[133] Когда различные типы пьезоэлектрических материалов с различными направлениями более длинных осей предоставляются вместе, гибкое устройство 100 имеет возможность деформироваться не только горизонтально, но также и вертикально.
[134] Хотя фиг. 23 иллюстрирует пример, в котором первые и вторые пьезоэлектрические материалы размещаются в идентичном слое, пьезоэлектрические материалы могут размещаться в различных слоях относительно друг друга.
[135] Фиг. 24 является поперечным сечением гибкого устройства, включающего в себя множество пьезоэлектрических материалов, распределенных по различным слоям. Ссылаясь на фиг. 24, множество слоев 126-1, 126-2 последовательно укладывается на одной поверхности дисплея 120. Множество пьезоэлектрических материалов распределено по множеству слоев 126-1, 126-2.
[136] Фиг. 24 является поперечным сечением с разрезом вдоль направления по столбцам гибкого устройства 1000. Ссылаясь на фиг. 24, первые пьезоэлектрические материалы 110-H11, 110-H12, 110-H13, 110-H14, совмещенные в направлении по столбцам, последовательно размещаются в верхнем слое 126-1, в то время как вторые пьезоэлектрические материалы 110-V11, 110-V21, 110-V31, совмещенные в направлении по строкам, размещаются в нижнем слое 126-2.
[137] Когда первые пьезоэлектрические материалы, которые должны деформироваться по столбцам, и вторые пьезоэлектрические материалы, которые должны деформироваться по строкам, размещаются в различных слоях относительно друг друга, может упрощаться электродный рисунок.
[138] Фиг. 25 иллюстрирует рисунок компоновки пьезоэлектрических материалов в другом примерном варианте осуществления. Ссылаясь на фиг. 25, множество пьезоэлектрических материалов 110-1~110-14 последовательно совмещаются в направлении по столбцам. Пьезоэлектрические материалы 110-1, 110-2, 110-3, 110-4, 110-8, 110-9, 110-10, 110-11, включенные в столбцы (H1, H3) с нечетным номером, и пьезоэлектрические материалы 110-5, 110-6, 110-7, 110-12, 110-13, 110-14, включенные в столбцы (H2, H4) с четным номером, пересекаются между собой.
[139] Гибкое устройство, которое включает в себя пьезоэлектрические материалы в таком рисунке, как проиллюстрировано на фиг. 25, имеет возможность регулировать степень деформации без необходимости регулировать значение сигнала возбуждения посредством регулирования возбуждения пьезоэлектрических материалов в соответствующих столбцах. Конкретно, для того чтобы прокатывать гибкое устройство 1000, контроллер 130 может возбуждать пьезоэлектрические материалы всех столбцов. Наоборот, для того чтобы задавать меньшую степень деформации, контроллер 130 может возбуждать только столбцы с четным номером или с нечетным номером.
[140] В примерном варианте осуществления, проиллюстрированном на фиг. 25, соответствующие пьезоэлектрические материалы могут быть распределены по различным слоям. Фиг. 26 является видом в поперечном сечении гибкого устройства, включающего в себя пьезоэлектрические материалы, которые распределены по множеству слоев.
[141] Ссылаясь на фиг. 26, пьезоэлектрические материалы 110-1, 110-2, 110-3, 110-4, соответствующие столбцам с нечетным номером, размещаются в верхнем слое 126-1, в то время как пьезоэлектрические материалы 110-5, 110-6, 110-7, соответствующие столбцам с четным номером, размещаются в нижнем слое 126-2.
[142] Между тем, ссылаясь на фиг. 25, гибкое устройство 1000 может изгибаться по диагонали, когда электродные рисунки соединены в единице пьезоэлектрических материалов, как проиллюстрировано на фиг. 14.
[143] Например, только второй, пятый и восьмой пьезоэлектрические материалы 110-2, 110-5, 110-8 изгибаются, когда контроллер 130 прикладывает сигнал возбуждения ко второму, пятому и восьмому пьезоэлектрическим материалам 110-2, 110-5, 110-8, и не прикладывает к остальным пьезоэлектрическим материалам. Как результат, формируется линия изгиба, соединяющая второй, пятый и восьмой пьезоэлектрические материалы 110-2, 110-5, 110-8, так что деформация возникает в отношении линии изгиба, в которой левый угол изгибается вверх или вниз.
[144] Хотя примерные варианты осуществления, поясненные выше, имеют пьезоэлектрические материалы, размещенные с более длинными осями, совмещенными в направлениях по столбцам или по строкам, рисунок компоновки пьезоэлектрических материалов может варьироваться. Например, более длинные оси пьезоэлектрических материалов могут совмещаться в диагональном направлении. Дополнительно, вместо распределения по всей области корпуса 100 гибкого устройства 1000, пьезоэлектрические материалы могут последовательно размещаться вдоль краевой области в одной или двух линиях.
[145] Фиг. 27 является блок-схемой последовательности операций, предоставленной для того, чтобы пояснять способ работы гибкого устройства согласно примерному варианту осуществления. Ссылаясь на фиг. 27, когда возникает предварительно установленное событие на S2710, гибкое устройство 1000 прикладывает соответствующий возбуждающий сигнал к соответствующим пьезоэлектрическим материалам, соответствующим событию, на S2720.
[146] Как пояснено выше, пьезоэлектрический материал может включать в себя верхний и нижний пьезоэлектрические слои. Сигнал возбуждения может быть отдельно определен для соответствующих пьезоэлектрических материалов, в зависимости от типа события. Иными словами, операция для того, чтобы прикладывать сигнал возбуждения, может включать в себя отдельное определение сигналов возбуждения, которые должны прикладываться к верхнему и нижнему пьезоэлектрическим слоям, во множестве пьезоэлектрических материалов в зависимости от типа события, и прикладывание определенных сигналов возбуждения к верхнему и нижнему пьезоэлектрическим материалам.
[147] При прикладывании сигналов возбуждения деформируются соответствующие пьезоэлектрические материалы. Направление деформации, как пояснено выше, определяется посредством взаимосвязи между сигналами возбуждения, прикладываемыми к верхнему и нижнему пьезоэлектрическим слоям. На S2730, когда деформируются соответствующие пьезоэлектрические материалы, деформируется форма корпуса 100 гибкого устройства, в котором размещаются пьезоэлектрические материалы. Форма корпуса 100 может быть деформирована различными способами, в зависимости от местоположения возбужденных пьезоэлектрических материалов, полярности сигналов возбуждения или величины сигналов возбуждения. Рисунок компоновки или способ для возбуждения пьезоэлектрических материалов более не поясняются ниже, а ссылаются на вышеприведенные соответствующие пояснения.
[148] Между тем, как пояснено выше, пьезоэлектрические материалы могут классифицироваться на множество групп согласно своим местоположениям, когда можно локально деформировать гибкое устройство посредством прикладывания различных сигналов возбуждения к соответствующим группам.
[149] Гибкое устройство 1000 может автоматически деформироваться так, чтобы подходить для различных услуг, которые предоставляет гибкое устройство 1000. Гибкое устройство 1000 может быть реализовано как множество устройств. Например, гибкое устройство 1000 может быть реализовано как мобильный телефон, PDA, переносной компьютер, MP3-проигрыватель, устройство для чтения электронных книг, пульт дистанционного управления или любая новая форма устройства.
[150] Фиг. 28 является видом, предоставленным для того, чтобы пояснять конструкцию гибкого устройства 1000 согласно другому варианту осуществления. Ссылаясь на фиг. 28, гибкое устройство 1000 включает в себя множество пьезоэлектрических материалов 110-1~110-n, дисплей 120, контроллер 130, устройство 140 хранения данных, формирователь 150 сигналов управления, шину 160, датчик 170, детектор 180, модуль 190 связи, видеопроцессор 210, аудиопроцессор 220, кнопку 230, динамик 240, интерфейсы 250-1~250-m, камеру 260 и микрофон 270.
[151] Конструкция и работа множества пьезоэлектрических материалов 110-1~110-n, дисплея 120, контроллера 130, устройства 140 хранения данных, формирователя 150 сигналов управления и шины 160 не поясняется подробнее ниже.
[152] Как пояснено со ссылкой на фиг. 22, датчик 170 может включать в себя биодатчик, размещаемый на одной стороне корпуса 100, чтобы обнаруживать присутствие касания посредством тела (OB) пользователя.
[153] Датчик 170 дополнительно может включать в себя электромагнитный датчик, гиродатчик, датчик ускорения или датчик касания. Электромагнитный датчик считывает вращательное состояние и направление перемещения гибкого устройства 1000. Гиродатчик обнаруживает угол вращения гибкого устройства 1000. Могут предоставляться как электромагнитный датчик, так и гиродатчик, но можно обнаруживать вращательное состояние гибкого устройства 1000, даже когда предоставляется только один из них. Датчик ускорения работает с возможностью считывать степень наклона гибкого устройства 1000. Датчик касания может быть емкостным или резистивным. Емкостный датчик использует диэлектрический материал, нанесенный на поверхность дисплея 120, для того чтобы считывать микроток, возбужденный посредством тела пользователя, касающегося поверхности дисплея 120, и вычислять координаты касания. Резистивный датчик включает в себя две электродных пластины, так что когда пользователь касается экрана, контакт между верхней и нижней пластинами в точке касания обеспечивает обнаружение электрического тока и вычисление координат касания. Как пояснено выше, датчик касания может быть реализован различными способами. Датчик касания может размещаться на задней поверхности гибкого устройства 1000 и использоваться для того, чтобы считывать касание пользователя. Биодатчик может опускаться, когда датчик касания предоставляется на задней поверхности.
[154] Детектор 180 соединяется с соответствующими пьезоэлектрическими материалами 110-1~110-n для того, чтобы обнаруживать сигнал из пьезоэлектрических материалов. Когда пользователь изгибает корпус 100, давление прикладывается к пьезоэлектрическим материалам 110-1~110-n в изогнутой области. Как пояснено выше, под давлением, пьезоэлектрические материалы 110-1~110-n формируют пьезоэлектрический эффект. Как результат, пьезоэлектрические материалы 110-1~110-n формируют электрический сигнал со значением, соответствующим давлению.
[155] Контроллер 130 определяет состояние деформации корпуса 100 на основе изменения в электрическом сигнале, обнаруженного в детекторе 180. Конкретно, на основе местоположения пьезоэлектрических материалов 110-1~110-n, в которых обнаружено изменение электрического сигнала, контроллер 130 определяет деформирование области. Ссылаясь на фиг. 2, когда соответствующие пьезоэлектрические материалы 110-1~110-n размещаются на задней поверхности гибкого устройства 1000, сжимающая сила прикладывается к верхнему пьезоэлектрическому слою, и растягивающая сила прикладывается к нижнему пьезоэлектрическому слою после изгиба в направлении дисплея 120. В этом случае, электрический сигнал положительной полярности выводится из пьезоэлектрических материалов 110-1~110-n. При изгибе в противоположном направлении, пьезоэлектрические материалы 110-1~110-n выводят электрический сигнал отрицательной полярности. На основе полярности электрического сигнала, обнаруженной из пьезоэлектрических материалов 110-1~110-n, контроллер 130 определяет направление изгиба. Дополнительно, контроллер 130 имеет возможность определять интенсивность деформации на основе размера электрического сигнала. Дополнительно, контроллер 130 может определять длительность деформации посредством подсчета длительности обнаружения электрического сигнала.
[156] Как пояснено выше, при определении области, направления, интенсивности или времени изгиба, контроллер 130 может определять состояние деформации гибкого устройства 1000 посредством всестороннего анализа определенных результатов. Состояние деформации может включать в себя общий изгиб, складывание, мультиизгиб, изгиб и перемещение, изгиб и перевод в плоское состояние, изгиб и удержание, изгиб и скручивание, скручивание, верчение, встряхивание, прокатывание или различные другие состояния.
[157] Устройство 140 хранения данных хранит информацию относительно операции управления, соответствующей надлежащему состоянию деформации. Контроллер 130 выполняет соответствующую операцию управления согласно состоянию деформации на основе информации, сохраненной в устройстве 140 хранения данных. Конкретно, контроллер 130 может выполнять операцию, включающую в себя, например, включение, выключение, переключение каналов, настройку громкости, выполнение приложений, перемещение курсора, воспроизведение контента, просмотр веб-страниц, переключение страниц, регулирование качества содержимого экрана или различные другие операции.
[158] Модуль 190 связи сконфигурирован с возможностью осуществлять связь с различными типами внешних устройств согласно различным типам способов связи. Модуль 190 связи может включать в себя WiFi-кристалл 191, Bluetooth-кристалл 192, NFC-кристалл 193, кристалл 194 беспроводной связи или различные другие кристаллы связи.
[159] WiFi-кристалл 191, Bluetooth-кристалл 192 и NFC-кристалл 193 могут осуществлять связь посредством WiFi-, Bluetooth- и NFC-способов. NFC-кристалл 193 работает посредством способа связи в поле в ближней зоне (NFC), с использованием 13,56 МГц из числа различных RFID-полос частот, таких как 135 кГц, 13,56 МГц, 433 МГц, 860-960 МГц, 2,45 ГГц. Когда используется WiFi-кристалл 191 или Bluetooth-кристалл 192, сначала может передаваться и приниматься связанная с соединением информация, к примеру, SSID и сеансовый ключ, так что устанавливается связь для передачи и приема информации. Кристалл 194 беспроводной связи осуществляет связь согласно различным спецификациям связи, таким как IEEE, ZigBee, третье поколение (3G), партнерский проект третьего поколения (3GPP) или стандарт долгосрочного развития (LTE).
[160] Гибкое устройство 1000 дополнительно может включать в себя кристалл по стандарту глобальной системы позиционирования (GPS) или приемный модуль цифровой широковещательной передачи мультимедиа (DMB).
[161] Видеопроцессор 210 выполняет обработку видеоданных. Видеопроцессор 210 может выполнять различную обработку изображений, такую как, например, декодирование, масштабирование, фильтрация шума, преобразование частоты кадров или преобразование разрешения видеоданных.
[162] Аудиопроцессор 220 выполняет обработку аудиоданных. Аудиопроцессор 220 может выполнять различную обработку аудиоданных, такую как, например, декодирование, усиление, фильтрация шума или т.п.
[163] Аудио- и видеопроцессоры 220, 210 используются для того, чтобы обрабатывать и воспроизводить мультимедийный контент или DMB-сигнал.
[164] Дисплей 120 отображает видеокадры, обработанные в видеопроцессоре 210. Динамик 240 сконфигурирован с возможностью выводить не только различные аудиоданные, обработанные в аудиопроцессоре 220, но также и различные звуки предупредительных сообщений или голосовые сообщения.
[165] Кнопка 230 может включать в себя различные типы кнопок, такие как механическая кнопка, сенсорная панель или колесо, сформированные в предварительно определенной области, к примеру, на передней, боковой или задней стороне внешней части корпуса гибкого устройства 1000.
[166] Камера 260 сконфигурирована с возможностью захватывать неподвижные изображения или видеоизображения согласно управлению пользователем. Может предоставляться множество камер 260, включающих в себя фронтальную камеру и тыловую камеру.
[167] Микрофон 270 сконфигурирован с возможностью принимать пользовательский голос или другие звуки и преобразовывать его в аудиоданные. Контроллер 130 может использовать пользовательский голос, введенный через микрофон 270 во время вызова, или преобразовывать его в аудиоданные и сохранять в устройстве 140 хранения данных.
[168] Когда предоставляются камера 260 и микрофон 270, контроллер 130 может выполнять операцию управления согласно пользовательскому голосу, вводимому через микрофон 270, или пользовательскому движению, воспринимаемому через камеру 260. Иными словами, гибкое устройство 1000 может работать в режиме управления движением или в режиме голосового управления, в дополнение к управлению согласно деформации или касанию. При работе в режиме управления движением, контроллер 130 может активировать камеру 260, чтобы захватывать пользователя, отслеживать изменение в движении пользователя и, соответственно, осуществлять операцию управления. В режиме голосового управления, контроллер 130 может работать в режиме распознавания голоса, чтобы анализировать пользовательский голос, вводимый через микрофон 270, и выполнять управление согласно проанализированному пользовательскому голосу. Контроллер 130 может управлять формирователем 150 сигналов управления таким образом, чтобы возбуждать соответствующие пьезоэлектрические материалы 110-1~110-n на основе пользовательского голоса, пользовательского движения или нажатия кнопки 230. Соответственно, форма гибкого устройства 1000 деформирована надлежащим образом согласно пользовательскому управлению.
[169] Кроме того, могут предоставляться различные интерфейсы 250-1~250-m для того, чтобы соединяться с различными внешними контактными выводами, такими как гарнитура, мышь или LAN. Дополнительно, хотя не проиллюстрировано, гибкое устройство 1000 дополнительно может включать в себя источник питания (не проиллюстрирован). Источник питания подает электричество в соответствующие компоненты гибкого устройства 1000. Источник питания может быть гибким, так что он изгибается вместе с гибким устройством 100 отображения. В таком случае, токосъемник, электрод, электролит или плакировка могут формироваться из гибкого материала.
[170] Между тем, работа контроллера 130, как пояснено выше, может выполняться согласно программе, сохраненной в устройстве 140 хранения данных. Устройство 140 хранения данных может хранить различные данные, включающие в себя, например, программное обеспечение ОС для того, чтобы управлять гибким устройством 1000, различные приложения, данные, введенные или заданные во время выполнения приложений, контент, жест изгиба или информацию управления pm.
[171] Контроллер 130 полностью управляет работой гибкого устройства 1000 с использованием различных программ, сохраненных в устройстве 140 хранения данных.
[172] Контроллер 130 может включать в себя постоянное запоминающее устройство 131 (ROM), оперативное запоминающее устройство 132 (RAM), центральный процессор 133 (CPU), графический процессор 134 (GPU) и системную шину 135.
[173] ROM(131), RAM(132), CPU(133) и GPU(134) могут соединяться между собой через системную шину 135.
[174] CPU 133 осуществляет доступ к устройству 140 хранения данных и выполняет начальную загрузку с использованием ОС, сохраненной в устройстве 140 хранения данных. CPU 133 выполняет различные операции с использованием программ, контента или данных, сохраненных в устройстве 140 хранения данных.
[175] ROM 131 хранит набор команд для начальной загрузки системы. Когда электричество подается в ответ на команду включения, CPU 133 копирует ОС, сохраненную в устройстве 140 хранения данных, в RAM 132, выполняет ОС и загружает систему, согласно команде, сохраненной в ROM 131. Когда начальная загрузка завершается, CPU 133 копирует различные прикладные программы, сохраненные в устройстве 140 хранения данных, в RAM 132 и выполняет скопированные прикладные программы RAM 132, чтобы выполнять различные операции.
[176] Когда возникает вышеуказанное событие, CPU 133 передает информацию адреса, информацию направления, информацию сигналов возбуждения и т.д. пьезоэлектрических материалов 110-1~110-n, которые должны деформироваться, в формирователь 150 сигналов управления, так что корпус 100 деформируется согласно событию. Формирователь 150 сигналов управления формирует сигнал возбуждения, который должен прикладываться к соответствующим пьезоэлектрическим материалам 110-1~110-n, и выводит его согласно управлению CPU 134.
[177] Дополнительно, когда обнаруживаемый сигнал, соответствующий состоянию деформации, принимается из детектора 180, CPU 133 определяет состояние деформации, которое соответствует обнаруживаемому сигналу. После выполнения определения CPU 133 подтверждает через устройство 140 хранения данных информацию относительно функции, которая соответствует состоянию деформации, и загружает приложение для того, чтобы выполнять функцию, из RAM 132 и выполняет его.
[178] GPU 134 формирует экран, включающий в себя различные объекты, такие как значки, изображения или текст, с использованием модуля вычисления (не проиллюстрирован) и модуля рендеринга (не проиллюстрирован). Модуль вычисления вычисляет значения атрибутов, такие как координаты, конфигурация, размер или цвет, для того чтобы отображать соответствующие объекты согласно виду экрана. Модуль рендеринга формирует экраны с различными видами, включающие в себя объекты, на основе значений атрибутов, вычисляемых в модуле вычисления. Экраны, сформированные в модуле рендеринга, отображаются в области отображения дисплея 120.
[179] Как пояснено выше со ссылкой на фиг. 28, когда предоставляются пьезоэлектрические материалы, форма гибкого устройства может быть автоматически деформирована с использованием пьезоэлектрических материалов, или текущее состояние деформации может быть обнаружено с использованием пьезоэлектрических материалов. Как результат, без необходимости использовать отдельные датчики изгиба, можно легко определять то, в какую форму возникает деформация.
[180] Между тем, фиг. 28 иллюстрирует соответствующие компоненты гибкого устройства, реализованного в качестве устройства, объединяющего в себе несколько функций, включающих в себя связь, широковещательную передачу и воспроизведение видео. Соответственно, в зависимости от вариантов осуществления, могут опускаться или модифицироваться некоторые компоненты, проиллюстрированные на фиг. 28, либо могут добавляться другие компоненты.
[181] Как пояснено выше, контроллер 130 может выполнять различные операции посредством выполнения программ, сохраненных в хранилище 140.
[182] Фиг. 29 является видом, предоставленным для того, чтобы пояснять структуру программного обеспечения, сохраненного в устройстве 140 хранения данных. Ссылаясь на фиг. 29, устройство 140 хранения данных может хранить программное обеспечение, которое включает в себя базовый модуль 141, модуль 142 считывания, модуль 143 связи, модуль 144 представления, модуль 145 управления веб-обозревателем и модуль 146 управления услугами.
[183] Базовый модуль 141 обрабатывает сигналы, передаваемые из аппаратных средств, включенных в гибкое устройство 1000, и передает их в модуль верхнего уровня.
[184] Базовый модуль 141 включает в себя модуль 141-1 хранения данных, модуль 141-2 управления услугами на основе информации местоположения, модуль 141-3 обеспечения безопасности и сетевой модуль 141-4.
[185] Модуль 141-1 хранения данных управляет базой данных (DB) или системным реестром. CPU 133 осуществляет доступ к базе данных в устройстве 140 хранения данных с использованием модуля 141-1 хранения данных, чтобы считывать различные данные. Модуль 141-1 управления услугами на основе информации местоположения представляет собой программный модуль, который поддерживает услугу на основе информации местоположения в ассоциации с различными аппаратными средствами, такими как GPS-кристалл и т.п. Модуль 141-3 обеспечения безопасности представляет собой программный модуль, который поддерживает сертификацию, разрешения или защищенную область хранения аппаратных средств, и сетевой модуль 141-4 поддерживает сетевое соединение и включает в себя DNET-модуль или UPnP-модуль.
[186] Модуль 142 считывания собирает информацию из соответствующих датчиков детектора 180, анализирует и управляет собранной информацией. Конкретно, модуль 142 считывания выполняет обнаружение атрибутов действия, таких как, координаты точки касания, направление касания с перемещением, скорость перемещения или расстояние перемещения. В зависимости от вариантов осуществления, модуль 142 считывания может включать в себя модуль распознавания вращения, модуль распознавания голоса, модуль распознавания касаний, модуль распознавания движения или модуль распознавания изгиба. Модуль распознавания изгиба представляет собой программное обеспечение, которое анализирует обнаруживаемый сигнал в детекторе 180, чтобы определять состояние деформации способом, поясненным выше.
[187] Модуль 143 связи осуществляет связь с внешним миром. Модуль 143 связи может включать в себя модуль 143-1 обмена сообщениями, такой как программа обмена сообщениями, программа службы коротких сообщений (SMS) и службы мультимедийных сообщений (MMS) или почтовая программа, либо модуль 143-2 управления вызовами, такой как программный модуль агрегатора информации вызовов или VoIP-модуль.
[188] Модуль 144 представления конструирует экран отображения. Модуль 144 представления включает в себя мультимедийный модуль 144-1, чтобы воспроизводить и выводить мультимедийный контент, и модуль 144-2 UI-рендеринга, чтобы обрабатывать UI и графику. Мультимедийный модуль 144-1 может включать в себя модуль проигрывателя, модуль записывающей видеокамеры или звуковой процессор. Соответственно, модуль 144 представления воспроизводит различный мультимедийный контент и формирует и воспроизводит экран и аудио. Модуль 144-2 UI-рендеринга может включать в себя модуль комбинирования изображений, которые составляют изображения, модуль комбинирования координат, который комбинирует координаты на экране, чтобы отображать изображение, XII-модуль, который принимает различные события из аппаратных средств, или инструментарий управления двумерным/трехмерным UI, который составляет двумерный или трехмерный UI.
[189] Модуль 145 управления веб-обозревателем осуществляет веб-просмотр и доступ к веб-серверу. Модуль 145 управления веб-обозревателем может включать в себя различные модули, такие как модуль веб-просмотра для того, чтобы конструировать веб-страницу, модуль управления агентом загрузки для того, чтобы выполнять загрузку, модуль работы с закладками или модуль WebKit.
[190] Модуль 146 управления услугами включает в себя различные приложения, чтобы предоставлять услуги, которые соответствуют действию, когда вводится действие пользователя, такое как деформация, пользовательский голос, движение, касание, нажатие кнопок. Например, модуль 146 управления услугами может включать в себя программу текстового процессора, программу для чтения электронных книг, программу для работы с календарем, игровую программу, программу управления расписаниями, программу управления предупредительными сообщениями, программу воспроизведения контента, навигационную программу или программу управления виджетами. Когда выполняемые программы сопровождают деформацию, контроллер 130 управляет формирователем 150 сигналов управления таким образом, чтобы обеспечивать то, что возникает деформация, как указано посредством программы. Примеры деформации не поясняются избыточно, а ссылаются на вышеприведенное соответствующее описание.
[191] Хотя различные программные модули проиллюстрированы на фиг. 29, программные модули, как проиллюстрировано, могут частично опускаться, модифицироваться, либо некоторые могут добавляться, в зависимости от типов и характеристик гибкого устройства 1000. Например, когда гибкое устройство 1000 реализовано в качестве пульта дистанционного управления с гибкостью и функцией управления на внешних устройствах и без функции отображения, могут опускаться такие модули, как модуль 144 представления, модуль 145 управления веб-обозревателем или модуль 146 управления услугами. В этом случае, модуль для того, чтобы обнаруживать характеристику состояния деформации, и системный реестр для того, чтобы обозначать информацию относительно управляющего сигнала, соответствующего обнаруженному результату, могут сохраняться в устройстве 140 хранения данных для использования.
[192] Между тем, как пояснено выше, гибкое устройство 1000 может использовать как первый, так и второй пьезоэлектрические эффекты пьезоэлектрических материалов.
[193] Фиг. 30 является блок-схемой последовательности операций, предоставленной для того, чтобы пояснять способ работы гибкого устройства с использованием первого пьезоэлектрического эффекта.
[194] Ссылаясь на фиг. 30, на S3010, гибкое устройство постоянно отслеживается, чтобы обнаруживать электрические сигналы в соответствующих пьезоэлектрических материалах. Когда электрические сигналы обнаружены на S3020, гибкое устройство 1000 проверяет состояние деформации, которое соответствует характеристике изменения электрических сигналов. Способ для определения состояния деформации не поясняется избыточно ниже.
[195] На S3030, после проверки состояния деформации, гибкое устройство 1000 выполняет операцию управления, соответствующую состоянию. Поскольку примеры состояния деформации и операций управления, соответствующих им, также пояснены выше, они также опускаются ниже для краткости.
[196] Как пояснено выше, согласно различным примерным вариантам осуществления, можно свободно деформировать гибкое устройство 1000 с использованием множества пьезоэлектрических материалов, размещаемых в гибком устройстве 1000.
[197] Дополнительно, поскольку можно обнаруживать состояние деформации гибкого устройства 1000 с использованием пьезоэлектрических материалов, пользователь имеет возможность выбирать и выполнять различные функции посредством действия деформации.
[198] Как результат, повышается эффективность использования и удовлетворенность пользователей от использования гибкого устройства.
[199] Между тем, способ работы гибкого устройства согласно различным примерным вариантам осуществления может быть реализован как программа для использования в гибком устройстве.
[200] Конкретно, может предоставляться невременный машиночитаемый носитель, хранящий программу, при этом программа включает в себя этапы определения того, имеет или нет предварительно установленное событие место, и когда возникает событие, прикладывания сигнала возбуждения по отдельности ко множеству пьезоэлектрических материалов, смонтированных в различных местоположениях гибкого устройства.
[201] Невременный машиночитаемый носитель означает носитель, который является считываемым посредством устройства и который хранит данные полупостоянно, в отличие от носителя, который хранит данные ненадолго, такого как регистры, кэш или запоминающее устройство. Конкретно, различные приложения или программы, как пояснено выше, могут сохраняться и предоставляться на невременном машиночитаемом носителе, таком как CD, DVD, жесткий диск, Blu-Ray-диск, USB, карта памяти или ROM.
[202] Вышеприведенные примерные варианты осуществления и преимущества являются просто примерами и не должны рассматриваться как ограничивающие примерные варианты осуществления. Настоящие принципы могут легко применяться к другим типам устройств. Кроме того, описание примерных вариантов осуществления идеи настоящего изобретения имеет намерение быть иллюстративным, а не ограничивать объем формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИБКОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ГИБКИМ УСТРОЙСТВОМ | 2013 |
|
RU2645665C2 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2652459C2 |
| ГИБКОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ УПРАВЛЕНИЯ ЕГО РАБОТОЙ | 2013 |
|
RU2628174C2 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СООТВЕТСТВУЮЩИЙ СПОСОБ УПРАВЛЕНИЯ | 2013 |
|
RU2653303C2 |
| ГИБКОЕ УСТРОЙСТВО ОТОБРАЖЕНИЯ И СООТВЕТСТВУЮЩИЙ СПОСОБ ОТОБРАЖЕНИЯ | 2013 |
|
RU2656977C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ УМЕНЬШЕНИЯ НАПРЯЖЕНИЯ ДЛЯ ДИСПЛЕЕВ С АКТИВНОЙ МАТРИЦЕЙ С ИСПОЛЬЗОВАНИЕМ ПЕРЕМЕННОСТИ ЕМКОСТИ ПИКСЕЛЬНОГО УСТРОЙСТВА | 2012 |
|
RU2597070C2 |
| ГИБКОЕ УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ИМ | 2013 |
|
RU2632413C2 |
| ОПРЕДЕЛЕНИЕ ЗАГРЯЗНЕНИЯ БИОДАТЧИКОВ, ИСПОЛЬЗУЕМОЕ В СИСТЕМАХ ИЗМЕРЕНИЙ УРОВНЯ АНАЛИТА | 2019 |
|
RU2780501C1 |
| СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ АНАЛИТА В ПРОБЕ | 2019 |
|
RU2793144C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ УДАЛЕНИЯ ЭЛЕМЕНТА НА СЕНСОРНОМ ДИСПЛЕЕ | 2014 |
|
RU2677591C2 |
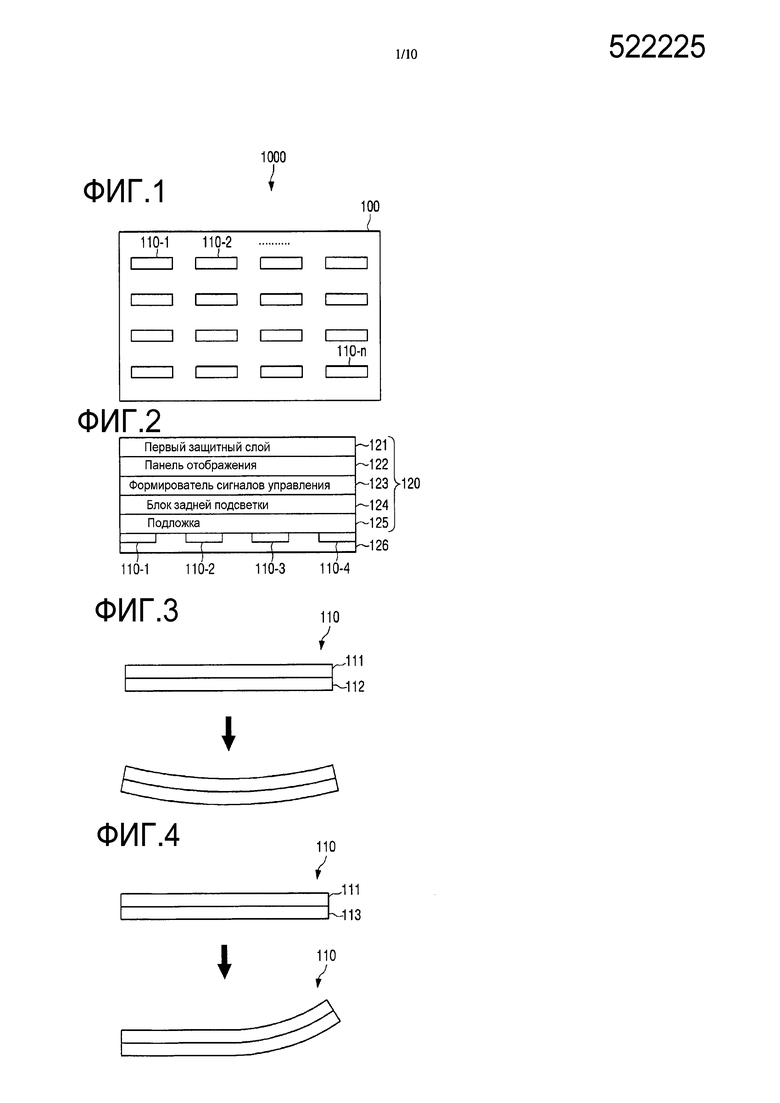
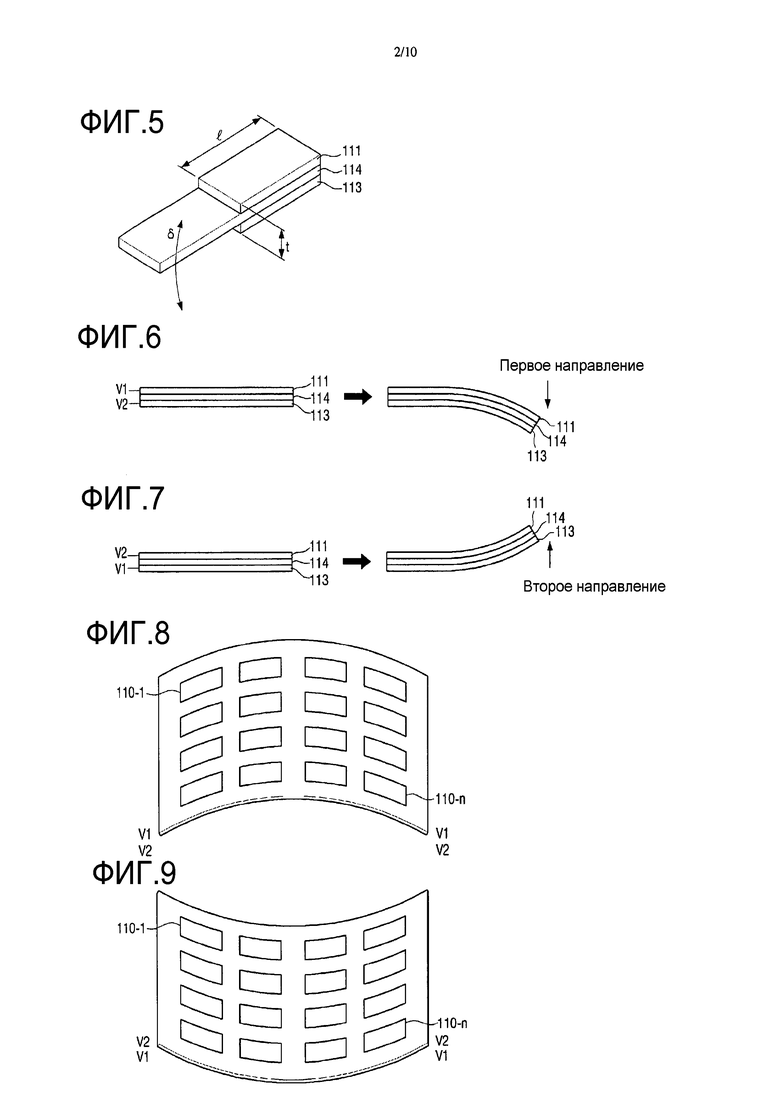
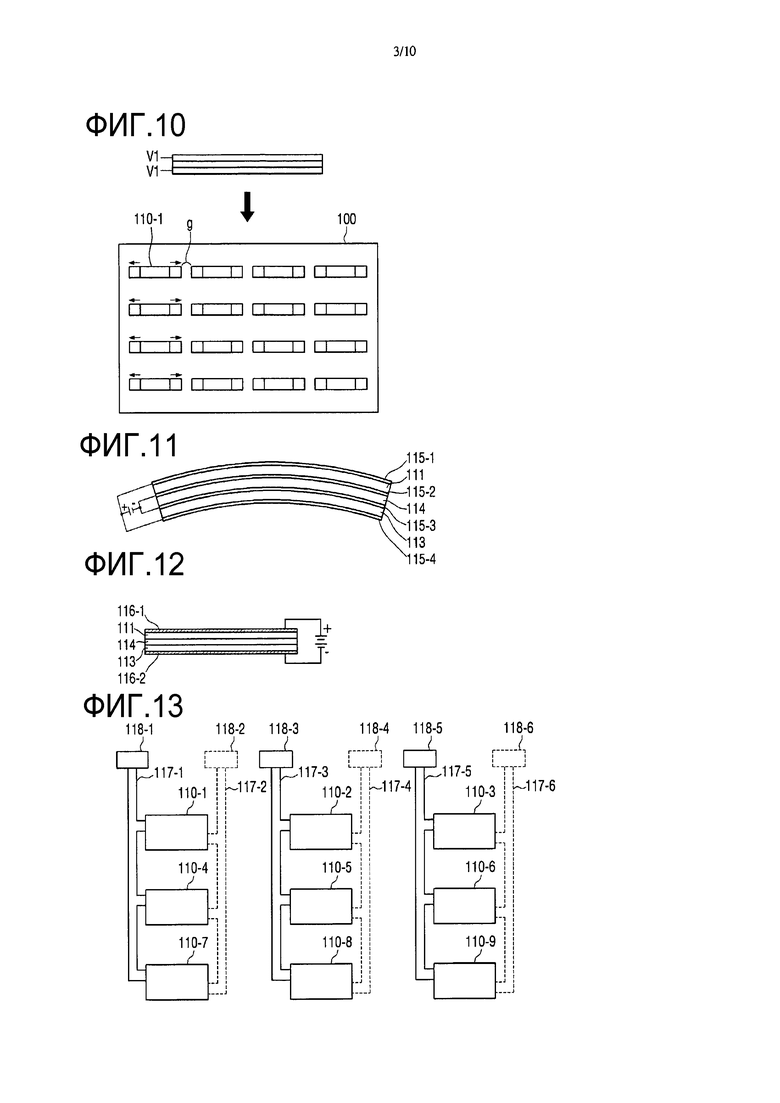
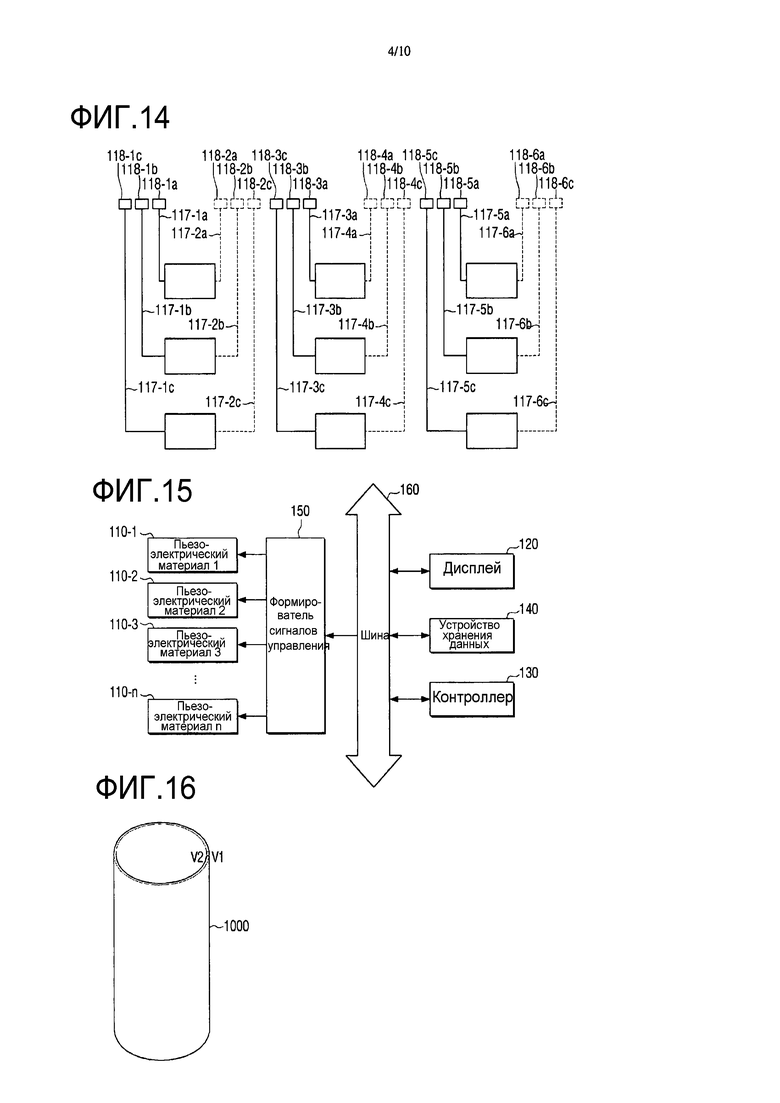
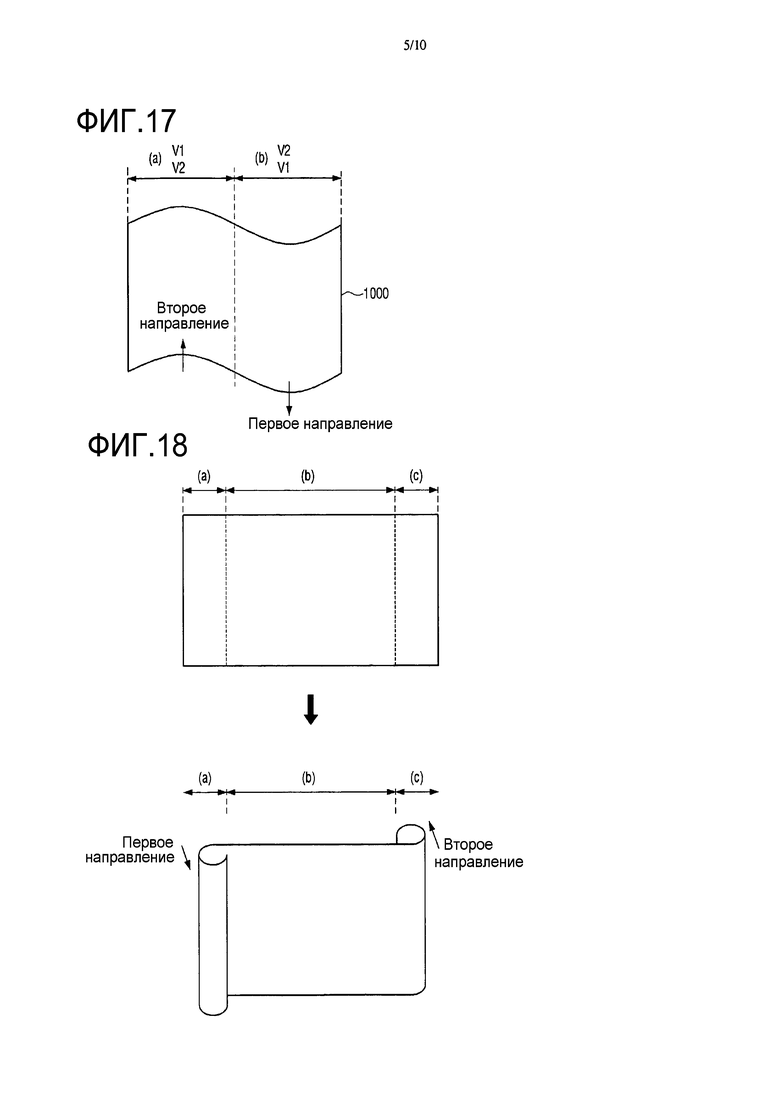
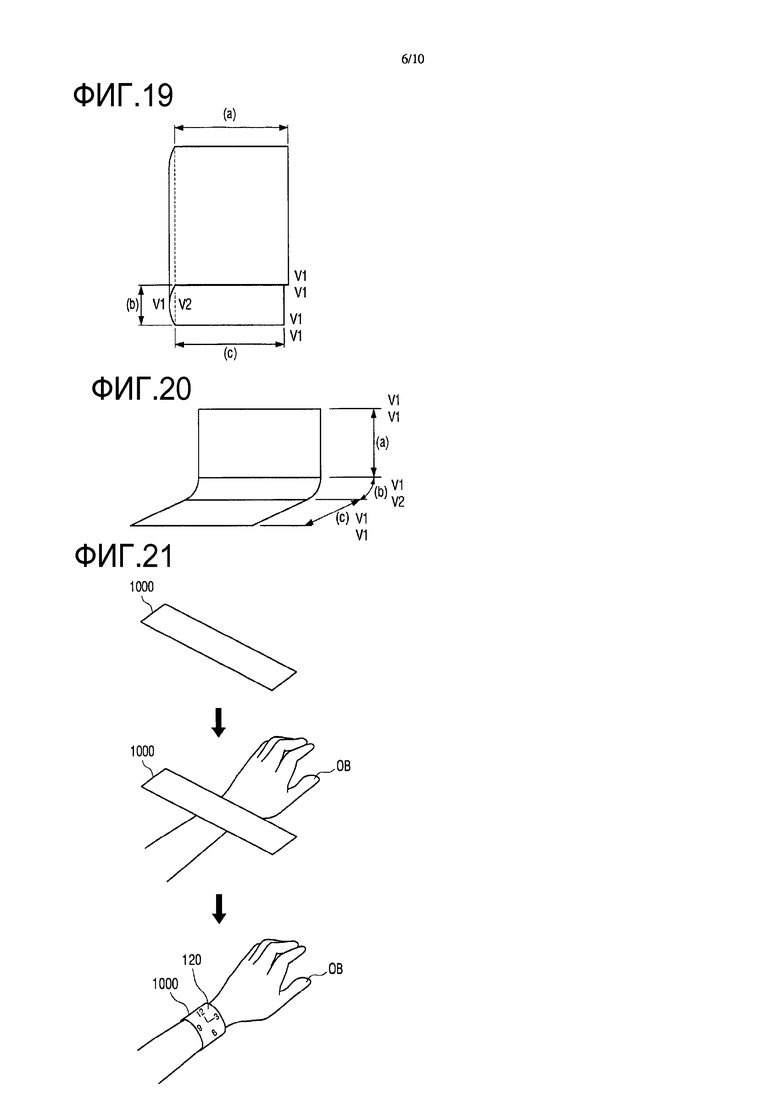
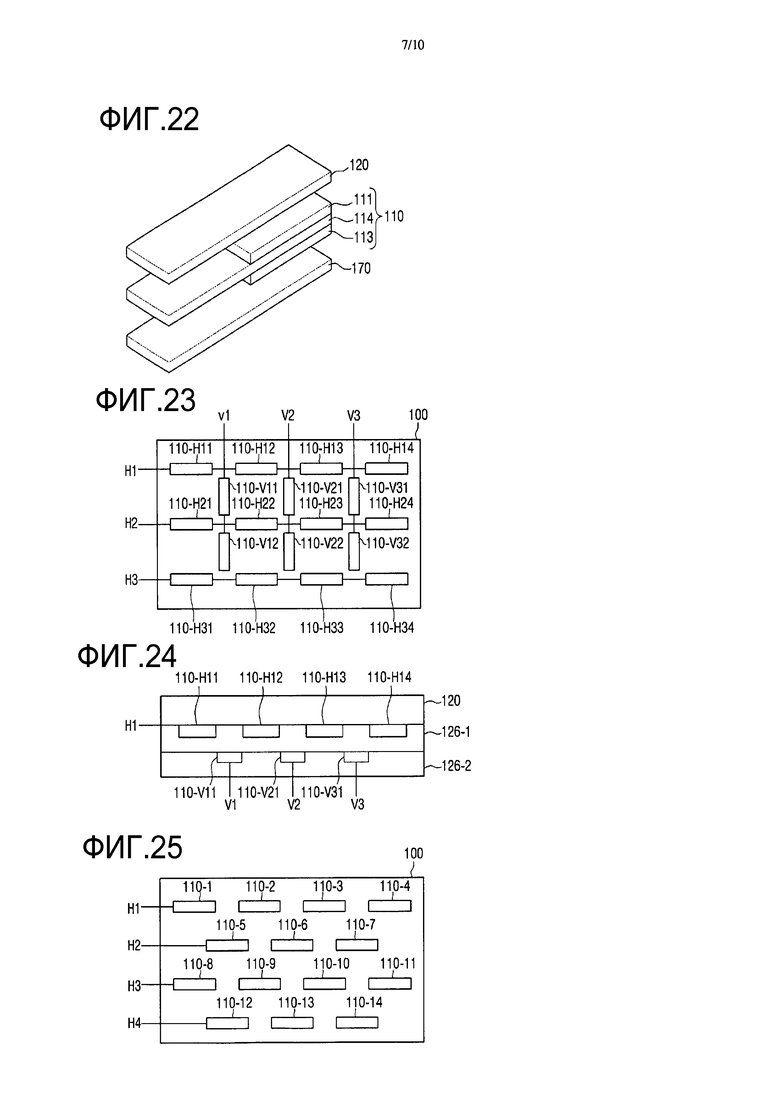
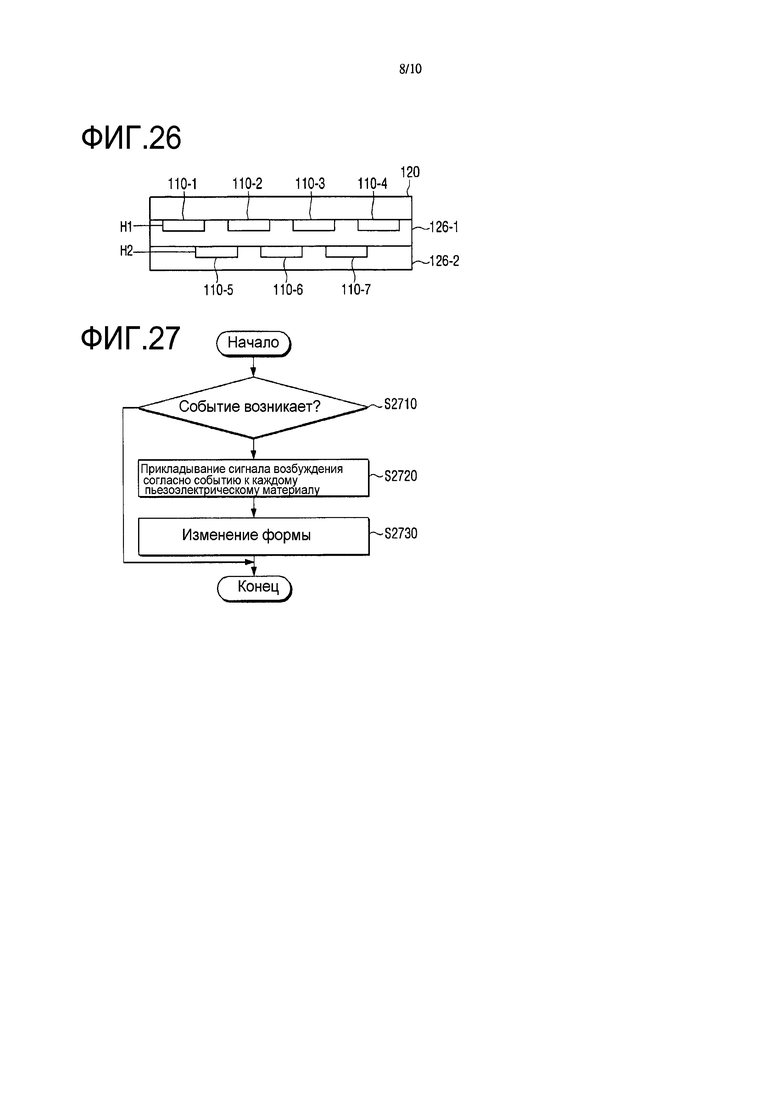
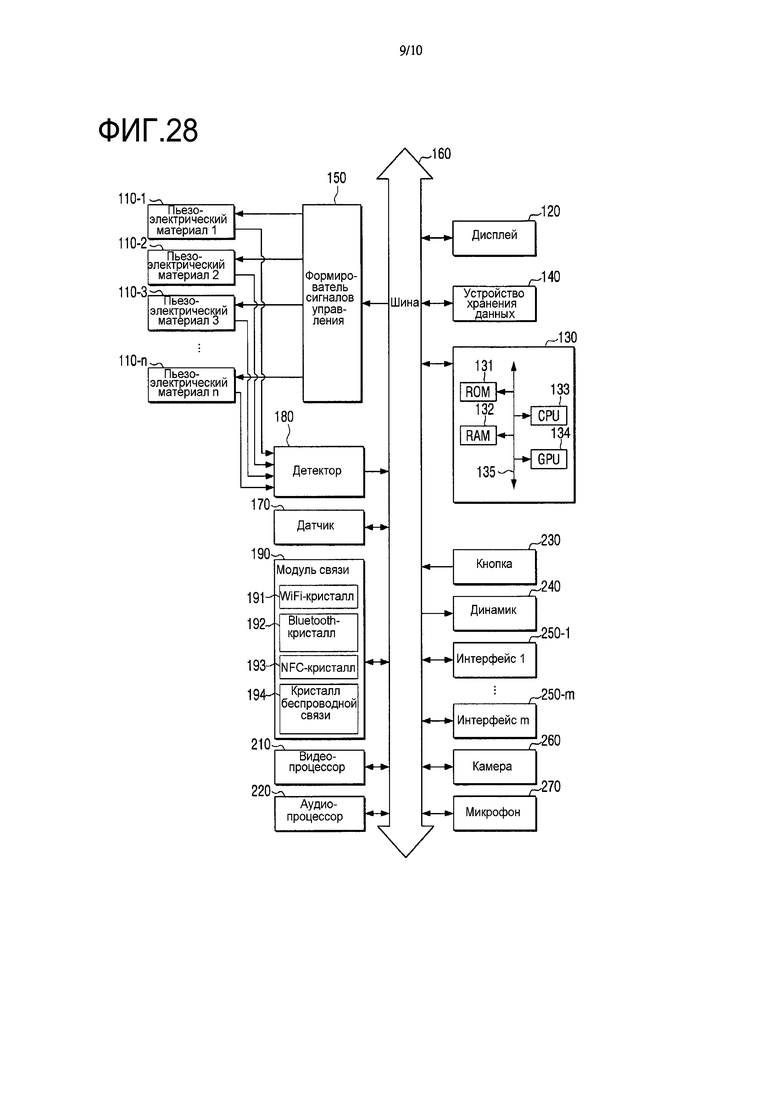
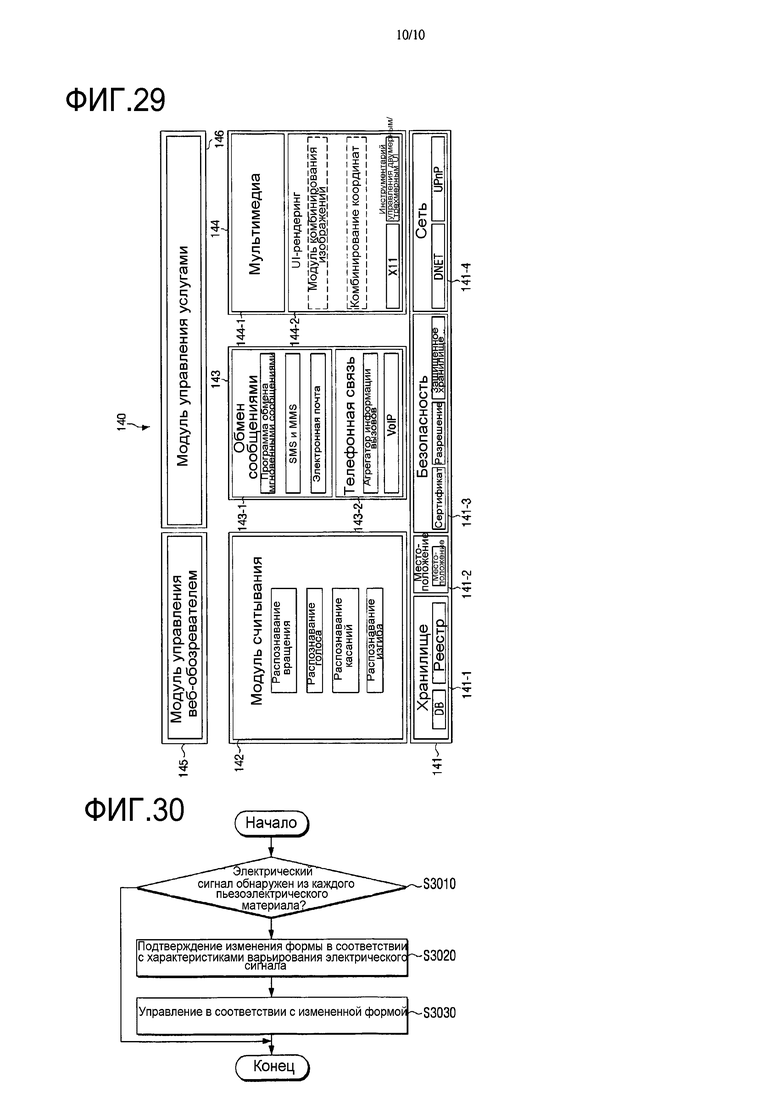
Изобретение относится к электротехнике. Технический результат состоит в расширении эксплуатационных возможностей. Гибкое устройство включает в себя гибкий корпус и множество пьезоэлектрических материалов, размещаемых на гибком корпусе, которые деформируются в ответ на сигналы возбуждения, вызывающие деформацию гибкого корпуса гибкого устройства. 2 н. и 12 з.п. ф-лы, 30 ил., 1 табл.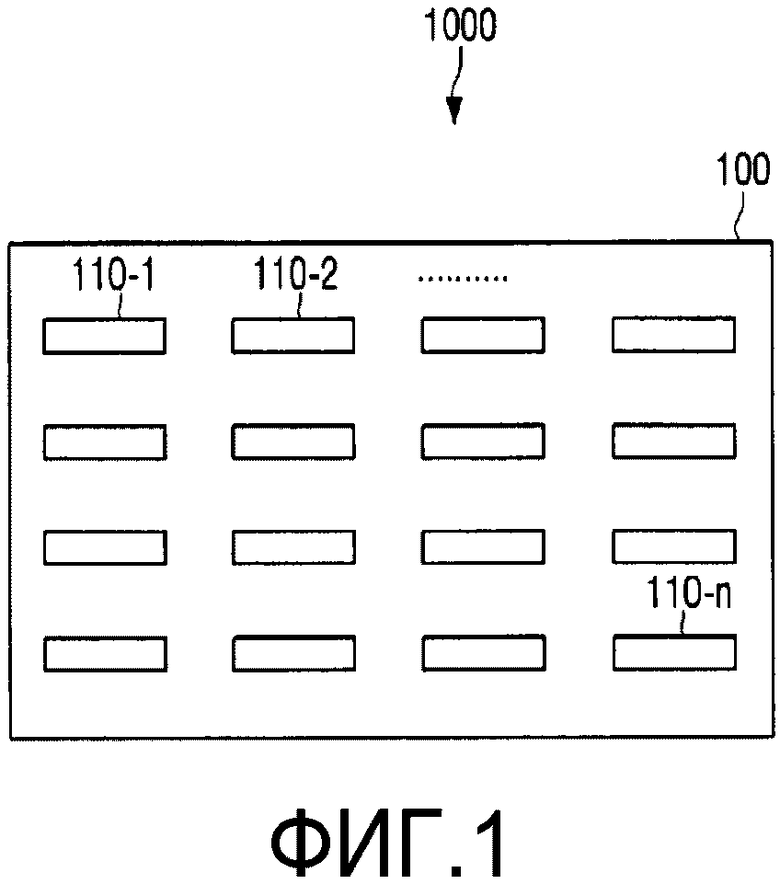
1. Гибкое дисплейное устройство, содержащее:
гибкий корпус;
нижний пьезоэлектрический слой из первого множества пьезоэлектрических материалов, расположенных на гибком корпусе, причем первое множество пьезоэлектрических материалов размещены в направлении (H1, H2, H3) по столбцам;
верхний пьезоэлектрический слой из второго множества пьезоэлектрических материалов, при этом второе множество пьезоэлектрических материалов размещены в направлениях (V1, V2, V3) по строкам, причем более длинная ось первого пьезоэлектрического материала является ортогональной к более длинной оси второго пьезоэлектрического материала, и строки (V1, V2, V3), в которых размещаются вторые пьезоэлектрические материалы, размещены между первыми пьезоэлектрическими материалами; и
гибкую панель отображения, поддерживаемую посредством гибкого корпуса.
2. Гибкое устройство по п. 1, дополнительно содержащее контроллер, сконфигурированный с возможностью прикладывать сигнал возбуждения к по меньшей мере одному из первого множества пьезоэлектрических материалов нижнего слоя и второго множества пьезоэлектрических материалов верхнего слоя, причем сигнал возбуждения вызывает деформацию этого по меньшей мере одного из первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов в ответ на обнаружение события.
3. Гибкое устройство по п. 2, в котором сигнал возбуждения содержит первый сигнал возбуждения и второй сигнал возбуждения, при этом первое множество пьезоэлектрических материалов деформируется в первом направлении в ответ на прикладывание первого сигнала возбуждения к первому множеству пьезоэлектрических материалов нижнего пьезоэлектрического слоя, а второе множество пьезоэлектрических материалов деформируется во втором направлении в ответ на прикладывание второго сигнала возбуждения ко второму множеству пьезоэлектрических материалов верхнего пьезоэлектрического слоя.
4. Гибкое устройство по п. 2, в котором контроллер разделяет первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов на множество групп на основе местоположений, в которых располагаются первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов, и прикладывает различные из первого сигнала возбуждения и второго сигнала возбуждения к соответственным группам, чтобы вызывать локальную деформацию разделенных на группы первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов.
5. Гибкое устройство по п. 2, дополнительно содержащее дисплей, при этом первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов располагаются в нижней части дисплея, причем контроллер избирательно прикладывает первый сигнал возбуждения и второй сигнал возбуждения к первому множеству пьезоэлектрических материалов и второму множеству пьезоэлектрических материалов на основе типа события, и при этом контроллер управляет дисплеем таким образом, чтобы отображать пользовательский интерфейс (UI), соответствующий состоянию деформации гибкого корпуса, соответствующему деформации первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов, на дисплее.
6. Гибкое устройство по п. 2, дополнительно содержащее:
дисплей; и
по меньшей мере один биодатчик, сконфигурированный с возможностью обнаруживать касание пользователя, размещаемый на нижней стороне дисплея,
при этом первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов располагаются между дисплеем и по меньшей мере одним биодатчиком, и контроллер избирательно прикладывает первый сигнал возбуждения и второй сигнал возбуждения к первому множеству пьезоэлектрических материалов и второму множеству пьезоэлектрических материалов и управляет дисплеем таким образом, чтобы отображать пользовательский интерфейс на дисплее в ответ на обнаружение касания пользователя по меньшей мере одним биодатчиком.
7. Гибкое устройство по п. 1, дополнительно содержащее промежуточный слой, расположенный на нижнем пьезоэлектрическом слое, при этом нижний пьезоэлектрический слой, промежуточный слой и верхний пьезоэлектрический слой уложены последовательно на одной стороне гибкого корпуса.
8. Гибкое устройство по п. 2, в котором величина сигнала возбуждения соответствует степени деформации упомянутого по меньшей мере одного из первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов.
9. Гибкое устройство по п. 1, дополнительно содержащее детектор, сконфигурированный с возможностью обнаруживать электрический сигнал, сформированный из одного или более пьезоэлектрических материалов из первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов в ответ на деформацию гибкого корпуса, при этом контроллер определяет состояние деформации гибкого корпуса на основе изменения в электрическом сигнале и выполняет операцию управления, соответствующую этому определенному состоянию деформации.
10. Способ работы гибкого дисплейного устройства, содержащий этапы, на которых:
обнаруживают, посредством контроллера гибкого дисплейного устройства, возникновение события; и
избирательно прикладывают сигналы возбуждения к первому множеству пьезоэлектрических материалов нижнего пьезоэлектрического слоя, расположенного на гибком корпусе гибкого дисплейного устройства, и второму множеству пьезоэлектрических материалов верхнего пьезоэлектрического слоя, расположенного на первом множестве пьезоэлектрических материалов, на основе упомянутого события, причем сигналы возбуждения вызывают деформацию первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов, при этом первое множество пьезоэлектрических материалов размещены в направлении (H1, H2, H3) по столбцам, а второе множество пьезоэлектрических материалов размещены в направлениях (V1, V2, V3) по строкам, причем более длинная ось первого пьезоэлектрического материала является ортогональной к более длинной оси второго пьезоэлектрического материала, и строки (V1, V2, V3), в которых размещаются вторые пьезоэлектрические материалы, размещены между первыми пьезоэлектрическими материалами.
11. Способ по п. 10, в котором упомянутое избирательное прикладывание сигналов возбуждения содержит этапы, на которых:
определяют сигналы возбуждения, которые должны прикладываться к первому множеству пьезоэлектрических материалов и второму множеству пьезоэлектрических материалов на основе типа события; и
прикладывают эти определенные сигналы возбуждения к первому множеству пьезоэлектрических материалов и второму множеству пьезоэлектрических материалов, при этом первое множество пьезоэлектрических материалов деформируется в первом направлении в ответ на прикладывание первого сигнала возбуждения к первому множеству пьезоэлектрических материалов нижнего пьезоэлектрического слоя, и второе множество пьезоэлектрических материалов деформируется во втором направлении в ответ на прикладывание второго сигнала возбуждения ко второму множеству пьезоэлектрических материалов верхнего пьезоэлектрического слоя.
12. Способ по п. 10, в котором упомянутое избирательное прикладывание содержит этапы, на которых:
разделяют первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов на множество групп на основе местоположений, в которых располагаются первое множество пьезоэлектрических материалов и второе множество пьезоэлектрических материалов; и
прикладывают различные из сигналов возбуждения к соответственным группам, чтобы вызывать локальную деформацию разделенных на группы первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов.
13. Способ по п. 10, дополнительно содержащий этап, на котором отображают пользовательский интерфейс (UI), соответствующий состоянию деформации гибкого дисплейного устройства, соответствующему деформации первого множества пьезоэлектрических материалов и второго множества пьезоэлектрических материалов, на дисплее гибкого дисплейного устройства.
14. Способ по п. 10, дополнительно содержащий этапы, на которых:
обнаруживают касание пользователя через биодатчик, предусмотренный на гибком дисплейном устройстве;
избирательно прикладывают сигналы возбуждения к первому множеству пьезоэлектрических материалов и второму множеству пьезоэлектрических материалов и отображают пользовательский интерфейс на дисплее гибкого дисплейного устройства в ответ на это обнаружение.
| US 20050253643 A1, 17.11.2005 | |||
| US 20110261021 A1, 27.10.2011 | |||
| US 20080316281 A1, 25.12.2011 | |||
| US 20120127136 A1, 24.05.2012 | |||
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| EA 201100893 A1, 30.01.2012 | |||
| RU 2009144035 А, 20.06.2011. | |||

