ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[1] Настоящее раскрытие сущности относится к гибкому устройству и к способу для управления его работой. Более конкретно, настоящее раскрытие сущности относится к гибкому устройству, которое может считывать форму изгиба с использованием множества датчиков движения и выполнять операцию согласно форме изгиба, и к способу для управления его работой.
УРОВЕНЬ ТЕХНИКИ
[2] С развитием электронных технологий, разрабатываются различные виды электронных устройств. В частности, устройства отображения, такие как телевизионные приемники (телевизоры), персональные компьютеры (PC), переносные компьютеры, планшетные PC, мобильные телефоны и MP3-проигрыватели, широко используются в такой степени, что их можно встречать в большинстве домашних хозяйств.
[3] Чтобы удовлетворять потребительский спрос на новые функции и новые формы дисплеев, прилагаются постоянные усилия по разработке новых форм устройств отображения. Один из результатов этих усилий представляет собой устройство отображения следующего поколения в форме гибкого устройства отображения.
[4] Гибкое устройство отображения представляет собой устройство отображения, которое может быть деформировано или деформировано в различные формы и конфигурацию, подобно бумаге. Гибкое устройство отображения может быть деформировано посредством силы, которая прикладывается пользователем, и в силу этого может быть использовано для различных целей. Например, гибкое устройство отображения может быть использовано для мобильных устройств, таких как мобильные телефоны, планшетные PC, электронные альбомы, персональные цифровые устройства (PDA) и MP3-проигрыватели.
[5] В предшествующем уровне техники, электронное устройство может управляться посредством действия касания или нажатия кнопок пользователем. Тем не менее, гибкое устройство является гибким. Соответственно, существует потребность в новом механизме выполнения действий с использованием характеристик такого гибкого устройства.
[6] Вышеуказанная информация представляется в качестве исходной информации только для того, чтобы помогать в понимании настоящего раскрытия сущности. Не выполняются определения и не выносятся суждения в отношении того, может или нет быть применимым что-либо из вышеуказанного в качестве предшествующего уровня техники относительно настоящего раскрытия сущности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ЗАДАЧА
[7] Аспекты настоящего раскрытия сущности заключаются в том, чтобы разрешать по меньшей мере вышеуказанные проблемы и/или недостатки и предоставлять по меньшей мере преимущества, описанные ниже. Соответственно, аспект настоящего раскрытия сущности заключается в том, чтобы предоставлять гибкое устройство, которое может эффективно определять форму изгиба с использованием множества датчиков движения, и способ для управления его работой.
РЕШЕНИЕ ЗАДАЧИ
[8] В соответствии с аспектом настоящего раскрытия сущности, предоставляется гибкое устройство. Гибкое устройство включает в себя множество датчиков движения, смонтированных в различных местоположениях гибкого устройства, хранилище, выполненное с возможностью сохранять оперативную информацию гибкого устройства, соответствующую форме изгиба, и контроллер, выполненный с возможностью определять форму изгиба гибкого устройства на основе считываемого значения каждого из множества датчиков движения и выполнять операцию, соответствующую определенной форме изгиба, на основе оперативной информации, сохраненной в хранилище.
[9] Согласно другому аспекту настоящего раскрытия сущности, контроллер может получать изменение считываемого значения каждого из множества датчиков движения и может определять форму изгиба на основе разности между измененными считываемыми значениями. Форма изгиба может включать в себя степень изгиба и направление изгиба.
[10] Согласно другому аспекту настоящего раскрытия сущности, множество датчиков движения могут представлять собой датчики, которые считывают изменение позиции в отношении по меньшей мере одной из трехмерных пространственных осей.
[11] Согласно другому аспекту настоящего раскрытия сущности, множество датчиков движения может располагаться в угловых областях гибкого устройства.
[12] Согласно другому аспекту настоящего раскрытия сущности, множество датчиков движения может включать в себя первый датчик движения, расположенный в центре первой краевой области из числа краевых областей гибкого устройства, и второй датчик движения, расположенный в центре второй краевой области, которая обращена к первой краевой области, из числа краевых областей гибкого устройства.
[13] Согласно другому аспекту настоящего раскрытия сущности, гибкое устройство дополнительно может включать в себя датчик касания, выполненный с возможностью считывать касание пользователя. Контроллер может активировать множество датчиков движения согласно касанию пользователя.
[14] Согласно другому аспекту настоящего раскрытия сущности, гибкое устройство дополнительно может включать в себя датчик изгиба, выполненный с возможностью считывать состояние изгиба гибкого устройства. Контроллер может определять форму изгиба на основе выходного значения датчика изгиба и считываемых значений множества датчиков движения.
[15] Согласно другому аспекту настоящего раскрытия сущности, когда считывается предварительно определенная калибровочная форма, контроллер может вычислять значение компенсации на основе считываемого значения, которое выводится из датчика изгиба в то время, когда считывается калибровочная форма, и может компенсировать считываемое значение датчика изгиба на основе значения компенсации.
[16] Согласно другому аспекту настоящего изобретения, множество датчиков движения может включать в себя по меньшей мере одно из датчика ускорения, геомагнитного датчика и гиродатчика.
[17] Согласно другому аспекту настоящего раскрытия сущности, контроллер может определять по меньшей мере одно из общего изгиба, складывания, мультиизгиба, изгиба и перемещения, изгиба и перевода в плоское состояние, изгиба и удержания, изгиба и скручивания, скручивания, верчения, встряхивания и прокатывания на основе изменения по меньшей мере одного из угла наклона в продольном направлении, угла наклона в поперечном направлении и угла относительно вертикальной оси, которые считываются посредством множества датчиков движения.
[18] Согласно другому аспекту настоящего раскрытия сущности, гибкое устройство дополнительно может включать в себя дисплей, выполненный с возможностью отображать экран, соответствующий форме изгиба.
[19] Согласно другому аспекту настоящего раскрытия сущности, когда изгиб возникает в то время, когда множество меню отображаются на дисплее, контроллер может выполнять операцию навигации по меню для множества меню согласно форме изгиба, и операция навигации по меню может включать в себя по меньшей мере одно из операции перемещения меню, операции выбора меню, операции изменения страницы меню, операции прокрутки меню, операции отображения главного меню и подменю и операции переключения между главным меню и подменю.
[20] В соответствии с другим аспектом настоящего раскрытия сущности, предоставляется способ для управления работой гибкого устройства. Способ включает в себя вывод, посредством множества датчиков движения, смонтированных в различных местоположениях гибкого устройства, считываемых значений, определение формы изгиба изогнутого гибкого устройства посредством сравнения считываемых значений множества датчиков движения и выполнение операции, соответствующей форме изгиба.
[21] В соответствии с другим аспектом настоящего раскрытия сущности, определение формы изгиба может включать в себя получение изменения считываемого значения каждого из множества датчиков движения и определение формы изгиба на основе разности между измененными считываемыми значениями, и форма изгиба может включать в себя степень изгиба и направление изгиба.
[22] В соответствии с другим аспектом настоящего раскрытия сущности, множество датчиков движения могут представлять собой датчики, которые считывают изменение позиции в отношении по меньшей мере одной из трехмерных пространственных осей. Определение формы изгиба может включать в себя определение по меньшей мере одного из направления изгиба, степени изгиба, области изгиба и формы изгиба посредством сравнения результатов считывания изменений позиций посредством множества датчиков движения.
[23] В соответствии с другим аспектом настоящего раскрытия сущности, способ дополнительно может включать в себя, когда касание пользователя считывается посредством датчика касания, активацию множества датчиков движения.
[24] В соответствии с другим аспектом настоящего раскрытия сущности, гибкое устройство может включать в себя датчик изгиба, выполненный с возможностью считывать состояние изгиба гибкого устройства. Определение формы изгиба может включать в себя определение формы изгиба на основе считываемых значений датчика изгиба и множества датчиков движения.
[25] В соответствии с другим аспектом настоящего раскрытия сущности, способ дополнительно может включать в себя, когда считывается предварительно определенная калибровочная форма, вычисление значения компенсации на основе считываемого значения, которое выводится из датчика изгиба в то время, когда считывается калибровочная форма, и компенсацию считываемого значения датчика изгиба с использованием значения компенсации.
[26] В соответствии с другим аспектом настоящего раскрытия сущности, изгиб может включать в себя по меньшей мере одно из общего изгиба, складывания, мультиизгиба, изгиба и перемещения, изгиба и перевода в плоское состояние, изгиба и удержания, изгиба и скручивания, скручивания, верчения, встряхивания и прокатывания.
[27] В соответствии с другим аспектом настоящего раскрытия сущности, способ дополнительно может включать в себя отображение экрана, соответствующего форме изгиба.
[28] В соответствии с другим аспектом предварительно установленного раскрытия сущности, способ дополнительно может включать в себя отображение множества меню, и когда возникает изгиб для того, чтобы выполнять операцию навигации по меню, выполнении операции навигации по меню для множества меню согласно форме изгиба.
[29] В соответствии с другим аспектом настоящего раскрытия сущности, операция навигации по меню может включать в себя по меньшей мере одно из операции перемещения меню, операции выбора меню, операции изменения страницы меню, операции прокрутки меню, операции отображения главного меню и подменю и операции переключения между главным меню и подменю.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
[30] Согласно различным вариантам осуществления, как описано выше, форма изгиба может эффективно считываться посредством множества датчиков движения. Соответственно, работа гибкого устройства может легко управляться с использованием действия изгиба.
[31] Другие аспекты, преимущества и характерные признаки раскрытия сущности должны становиться очевидными специалистам в данной области техники из нижеприведенного подробного описания, которое, при рассмотрении вместе с прилагаемыми чертежами, раскрывает различные варианты осуществления настоящего раскрытия сущности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[32] Вышеуказанные и другие примерные аспекты, признаки и преимущества конкретных вариантов осуществления настоящего раскрытия сущности должны становиться более понятными из последующего подробного описания, рассматриваемого вместе с прилагаемыми чертежами, из которых:
[33] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию гибкого устройства согласно варианту осуществления настоящего раскрытия сущности;
[34] Фиг. 2 является блок-схемой, иллюстрирующей пример датчика движения, согласно варианту осуществления настоящего раскрытия сущности;
[35] Фиг. 3 является видом для того, чтобы иллюстрировать осевые направления множества датчиков движения, которые размещаются в гибком устройстве согласно варианту осуществления настоящего раскрытия сущности;
[36] Фиг. 4 является видом, иллюстрирующим координаты на опорной оси для того, чтобы обнаруживать форму изгиба гибкого устройства согласно варианту осуществления настоящего раскрытия сущности;
[37] Фиг. 5 является видом, иллюстрирующим форму изгиба, в которой центр гибкого устройства искривляется вверх, согласно варианту осуществления настоящего раскрытия сущности;
[38] Фиг. 6А и 6B являются видами, иллюстрирующими изменение считываемого значения датчика движения, когда выполняется изгиб, согласно варианту осуществления настоящего раскрытия сущности;
[39] Фиг. 7 является видом, иллюстрирующим форму изгиба, в которой центр гибкого устройства искривляется вниз, согласно варианту осуществления настоящего раскрытия сущности;
[40] Фиг. 8 является видом, иллюстрирующим изменения для осей датчиков движения, когда скручивание возникает в первом направлении, согласно варианту осуществления настоящего раскрытия сущности;
[41] Фиг. 9 является видом, иллюстрирующим изменения для осей датчиков движения, когда скручивание возникает во втором направлении, согласно варианту осуществления настоящего раскрытия сущности;
[42] Фиг. 10 является видом, иллюстрирующим изменения для осей датчиков движения, когда возникает изгиб и скручивание, согласно варианту осуществления вследствие настоящего раскрытия сущности;
[43] Фиг. 11 является видом, иллюстрирующим конфигурацию гибкого устройства, которое включает в себя три датчика движения, согласно варианту осуществления настоящего раскрытия сущности;
[44] Фиг. 12А и 12B являются видами, иллюстрирующими изменения для осей датчиков движения, когда мультиизгиб возникает в гибком устройстве, включающем в себя три датчика движения, согласно варианту осуществления настоящего раскрытия сущности;
[45] Фиг. 13А и 13B являются видами, иллюстрирующими изменения для осей датчиков движения, когда мультиизгиб возникает в гибком устройстве, включающем в себя четыре датчика движения, согласно варианту осуществления настоящего раскрытия сущности;
[46] Фиг. 14 является видом, иллюстрирующим изменения для осей датчиков движения, когда возникает изгиб и движение в гибком устройстве, включающем в себя три датчика движения, согласно варианту осуществления настоящего раскрытия сущности;
[47] Фиг. 15 является видом, иллюстрирующим изменения для осей датчиков движения, когда подбрасывание возникает в гибком устройстве, включающем в себя три датчика движения, согласно варианту осуществления настоящего раскрытия сущности;
[48] Фиг. 16 и 17 являются видами, иллюстрирующими изменения для осей датчиков движения, когда встряхивание возникает в гибком устройстве, включающем в себя три датчика движения, согласно варианту осуществления настоящего раскрытия сущности;
[49] Фиг. 18 является видом, иллюстрирующим конфигурацию гибкого устройства, в котором четыре датчика движения располагаются в углах, согласно варианту осуществления настоящего раскрытия сущности;
[50] Фиг. 19, 20 и 21 являются видами, иллюстрирующими конфигурацию гибкого устройства, в котором множество датчиков движения распределено согласно варианту осуществления настоящего раскрытия сущности;
[51] Фиг. 22 является видом для того, чтобы иллюстрировать систему для управления внешним устройством с использованием гибкого устройства согласно варианту осуществления настоящего раскрытия сущности;
[52] Фиг. 23 является блок-схемой, иллюстрирующей конфигурацию гибкого устройства отображения согласно различным вариантам осуществления настоящего раскрытия сущности;
[53] Фиг. 24 является видом, иллюстрирующим конфигурацию дисплея, который включен в гибкое устройство отображения по фиг. 23 согласно варианту осуществления настоящего раскрытия сущности;
[54] Фиг. 25-38 являются видами для того, чтобы иллюстрировать различные способы для считывания формы изгиба гибкого устройства отображения с использованием датчиков изгиба согласно варианту осуществления настоящего раскрытия сущности;
[55] Фиг. 39 является видом, иллюстрирующим конфигурацию гибкого устройства отображения, которое включает в себя датчик изгиба и множество датчиков движения согласно варианту осуществления настоящего раскрытия сущности;
[56] Фиг. 40 и 41 являются видами для того, чтобы иллюстрировать способ для выполнения калибровки для датчика изгиба согласно варианту осуществления настоящего раскрытия сущности;
[57] Фиг. 42 является блок-схемой, иллюстрирующей конфигурацию гибкого устройства отображения согласно различным вариантам осуществления настоящего раскрытия сущности;
[58] Фиг. 43 является видом, иллюстрирующим конфигурацию программы, которая сохранена в хранилище согласно варианту осуществления настоящего раскрытия сущности;
[59] Фиг. 44 и 45 являются видами для того, чтобы иллюстрировать способ для активации датчика движения согласно касанию пользователя согласно варианту осуществления настоящего раскрытия сущности;
[60] Фиг. 46-54 являются видами для того, чтобы иллюстрировать различные примеры операций, которые выполняются согласно формам изгиба согласно варианту осуществления настоящего раскрытия сущности;
[61] Фиг. 55 является видом, иллюстрирующим другой пример внешнего вида гибкого устройства отображения согласно варианту осуществления настоящего раскрытия сущности;
[62] Фиг. 56 является видом, иллюстрирующим форму гибкого устройства отображения, в котором источник питания является присоединяемым и отсоединяемым согласно варианту осуществления настоящего раскрытия сущности;
[63] Фиг. 57 и 58 являются видами, иллюстрирующими различные примеры внешнего вида гибкого устройства отображения согласно варианту осуществления настоящего раскрытия сущности; и
[64] Фиг. 59 является блок-схемой последовательности операций, иллюстрирующей способ для управления работой гибкого устройства согласно варианту осуществления настоящего раскрытия сущности.
[65] Следует отметить, что на всех чертежах аналогичные номера ссылок используются для того, чтобы иллюстрировать идентичные или аналогичные элементы, признаки и конструкции.
ОПТИМАЛЬНЫЙ РЕЖИМ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[66] РЕЖИМ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[67] Нижеприведенное описание со ссылкой на прилагаемые чертежи предоставляется для того, чтобы помогать в полном понимании различных вариантов осуществления раскрытия сущности, заданного посредством формулы изобретения и ее эквивалентов. Оно включает в себя различные сведения для того, чтобы помогать в этом понимании, но они должны рассматриваться просто как примерные. Соответственно, специалисты в данной области техники должны признавать, что различные изменения и модификации различных вариантов осуществления, описанных в данном документе, могут осуществляться без отступления от сущности и объема настоящего раскрытия сущности. Помимо этого, описания хорошо известных функций и конструкций могут быть опущены для ясности и краткости.
[68] Термины и слова, используемые в нижеприведенном описании и формуле изобретения, не ограничены библиографическими значениями, а используются автором изобретения просто для того, чтобы обеспечивать четкое и согласованное понимание настоящего раскрытия сущности. Соответственно, специалистам в данной области техники должно быть очевидным, что нижеприведенное описание различных вариантов осуществления настоящего раскрытия сущности предоставляется только для цели иллюстрации, а не для цели ограничения настоящего раскрытия сущности, заданного посредством прилагаемой формулы изобретения и ее эквивалентов.
[69] Следует понимать, что формы единственного числа "a", "an" и "the" включают в себя несколько объектов ссылки, если контекст явно не предписывает иное. Таким образом, например, ссылка на "поверхность компонента" включает в себя ссылку на одну или более таких поверхностей.
[70] Фиг. 1 является блок-схемой, иллюстрирующей конфигурацию гибкого устройства согласно варианту осуществления настоящего раскрытия сущности.
[71] Ссылаясь на фиг. 1, гибкое устройство 100 включает в себя множество датчиков 110-1-110-n движения, контроллер 120 и хранилище 130.
[72] Гибкое устройство 100 может быть реализовано посредством использования различных типов гибких устройств отображения, таких как мобильный телефон, планшетный PC, переносной компьютер, MP3-проигрыватель, электронный альбом, электронная книга, телевизионный приемник (телевизор) и монитор, либо может быть реализовано посредством использования различных типов устройств, таких как пульт дистанционного управления, клавишная панель ввода и мышь.
[73] Множество датчиков 110-1-110-n движения может монтироваться в различных местоположениях корпуса гибкого устройства 100. Корпус означает основной корпус гибкого устройства 100, который включает в себя кожух, закрывающий внутренние элементы гибкого устройства 100.
[74] Хранилище 130 может сохранять информацию относительно различных форм изгиба и информацию относительно работы гибкого устройства согласно каждой форме изгиба.
[75] Контроллер 120 определяет форму изгиба посредством сравнения считываемых значений множества датчиков 110-1-110-n движения. Кроме того, контроллер 120 выполняет операцию, соответствующую определенной форме изгиба, на основе оперативной информации, сохраненной в хранилище 130. Ниже поясняются примеры форм изгиба и соответствующих операций.
[76] Каждый из датчиков 110-1-110-n движения может считывать изменение позиции в отношении по меньшей мере одной из трехмерных пространственных осей. Датчики 110-1-110-n движения могут быть реализованы посредством использования различных датчиков, таких как гиродатчик, геомагнитный датчик и датчик ускорения. Датчик ускорения выводит считываемое значение, соответствующее гравитационному ускорению, которое изменяется согласно наклону устройства, к которому присоединен датчик. Гиродатчик представляет собой датчик, который, если возникает вращательное движение, обнаруживает угловую скорость посредством измерения кориолисовой силы, приложенной в направлении скорости движения. Геомагнитный датчик считывает азимут.
[77] Фиг. 2 является видом, иллюстрирующим датчик движения, который включает в себя датчик ускорения согласно варианту осуществления настоящего раскрытия сущности.
[78] Ссылаясь на фиг. 2, датчик 110 движения включает в себя формирователь 111 возбуждающих сигналов, датчик 112 ускорения, процессор 113 сигналов и контроллер 114 датчика.
[79] Формирователь 111 возбуждающих сигналов формирует возбуждающий сигнал, чтобы возбуждать датчик 112 ускорения. Возбуждающий сигнал формируется в форме импульсного сигнала и обратного импульсного сигнала и предоставляется в датчик 112 ускорения.
[80] Датчик 112 ускорения может быть реализован на 2 осях или 3 осях. Например, когда датчик 112 ускорения реализован посредством использования двухосевого датчика ускорения, датчик 112 ускорения включает в себя датчики ускорения по оси X и Y (не показаны), которые являются перпендикулярными друг другу. Когда датчик 112 ускорения реализован посредством использования трехосевого датчика ускорения, датчик 112 ускорения включает в себя датчики ускорения по оси X, Y и Z, которые располагаются в различных направлениях и являются перпендикулярными друг другу.
[81] Процессор 113 сигналов преобразует выходные значения датчиков ускорения по оси X, Y и Z в цифровые значения и предоставляет цифровые значения в контроллер 114 датчика. Процессор 113 сигналов может включать в себя схему прерывания, схему усиления, фильтр и аналогово-цифровой (A/D) преобразователь. Соответственно, процессор 113 сигналов прерывает, усиливает и фильтрует электрические сигналы, которые выводятся из трехосевых датчиков ускорения, преобразует электрические сигналы в цифровые значения напряжения и выводит цифровые значения напряжения.
[82] Контроллер 114 датчика выводит управляющий сигнал в формирователь 111 возбуждающих сигналов, чтобы управлять тем, следует или нет предоставлять возбуждающий сигнал. Датчик 111 движения может активироваться или деактивироваться под управлением контроллера 114 датчика.
[83] Когда датчик 112 ускорения активируется и выводит выходное значение каждого из датчиков ускорения по оси, и выходные значения обрабатываются посредством процессора 113 сигналов, контроллер 114 датчика нормализует выходные значения таким образом, что они преобразуются в пределах предварительно определенного диапазона, и вычисляет угол наклона в продольном направлении и угол наклона в поперечном направлении с использованием нормализованных значений.
[84] Например, когда предоставляется двухосевой датчик ускорения, контроллер 114 датчика нормализует выходные значения с использованием уравнения (1):
[85] уравнение 1
[86]
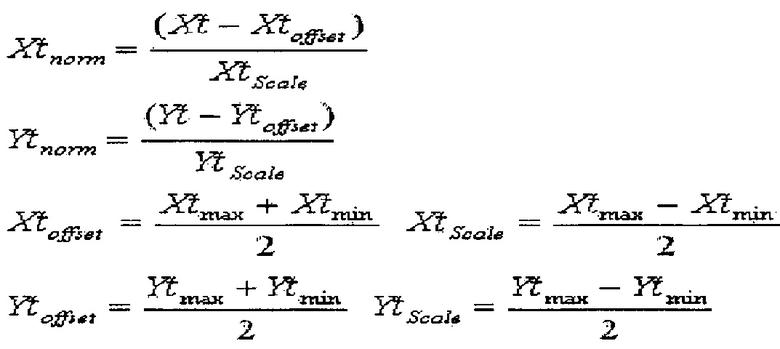
[87] В уравнении (1), Xt и Yt являются выходными значениями датчиков ускорения по оси X и по оси Y, соответственно, Xtnorm и Ytnorm являются нормализованными значениями датчиков ускорения по оси X и по оси Y, Xtmax и Xtmin являются максимальным значением и минимальным значением Xt, соответственно, Ytmax и Ytmax являются максимальным значением и минимальным значением Yt, соответственно, Xtoffset и Ytoffset являются значениями смещения датчиков ускорения по оси X и Y, соответственно, и XtScale и YtScale являются ценами деления шкалы датчиков ускорения по оси X и Y, соответственно. Xtoffset, Ytoffset, XtScale и YtScale могут быть вычислены заранее посредством вращения гибкого устройства 100, в котором монтируется датчик ускорения 110, несколько раз и могут быть сохранены в запоминающем устройстве датчика ускорения 110 или в хранилище 130.
[88] Контроллер 114 датчика может вычислять угол наклона в продольном направлении и угол наклона в поперечном направлении посредством вставки значения каждого из датчиков ускорения по оси, которое нормализовано так, как показано в уравнении (1), в уравнение (2):
[89] уравнение 2
[90]
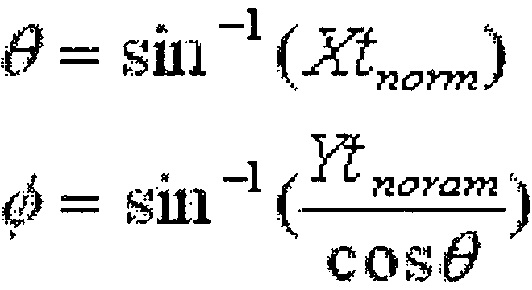
[91] В уравнении (2), θ является углом наклона в продольном направлении, и ∅ является углом наклона в поперечном направлении.
[92] С другой стороны, когда датчик 112 ускорения реализован посредством использования трехосевого датчика ускорения, контроллер 114 датчика может нормализовать выходные значения датчиков ускорения по оси X, Y и Z через процессор 113 сигналов посредством преобразования значений в значения в предварительно определенном диапазоне и может вычислять угол наклона в продольном направлении и угол наклона в поперечном направлении с использованием нормализованных значений.
[93] Контроллер 114 датчика предоставляет информацию относительно угла наклона в продольном направлении и угла наклона в поперечном направлении в контроллер 120. Контроллер 120 сравнивает информацию, предоставляемую из контроллера 114 датчика, и информацию формы изгиба, сохраненную в хранилище 130, и определяет форму изгиба.
[94] Чтобы достигать этого, хранилище 130 может сохранять информацию относительно различных форм изгиба. Информация формы изгиба является информацией относительно операции изменения формы гибкого устройства 100 посредством сгибания, изгиба и скручивания гибкого устройства 100 или информацией, задающей характеристику формы изгиба. Различные типы изгиба, такие как общий изгиб, складывание, мультиизгиб, изгиб и перемещение, изгиб и перевод в плоское состояние, изгиб и удержание, изгиб и скручивание, скручивание, верчение, встряхивание и прокатывание, могут задаваться согласно типу, форме, размеру и операции управления гибкого устройства 100. Хранилище 130 может сохранять значения датчиков движения, когда возникает каждый изгиб, либо информацию относительно операции, совпадающей с формой изгиба.
[95] Различная информация формы изгиба может задаваться согласно числу датчиков движения, местоположению размещения, осевому направлению и типу. Ниже описывается способ для определения формы изгиба с использованием датчика движения.
[96] ОПРЕДЕЛЕНИЕ ФОРМЫ ИЗГИБА С ИСПОЛЬЗОВАНИЕМ ДАТЧИКА ДВИЖЕНИЯ
[97] Фиг. 3 является видом, иллюстрирующим конфигурацию гибкого устройства, в котором располагаются два датчика движения, согласно варианту осуществления настоящего раскрытия сущности.
[98] Ссылаясь на фиг. 3, два датчика 110-1 и 110-2 движения располагаются на противоположных краях гибкого устройства. На фиг. 3, каждый из датчиков 110-1 и 110-2 движения реализован посредством использования трехосевого датчика ускорения, включающего в себя оси X, Y и Z, и оси двух датчиков 110-1 и 110-2 движения размещены в идентичных направлениях.
[99] Ось X1 первого датчика 110-1 движения указывает на правый край гибкого устройства 100, ось Y1 указывает на нижний край гибкого устройства 100, а ось Z1 указывает в направлении вниз, перпендикулярном плоскости, которая формируется посредством оси X1 и оси Y. Оси X2, Y2 и Z2 второго датчика 110-2 движения указывают в идентичных направлениях. Угол поворота вокруг оси X2 и оси X2 является углом наклона в поперечном направлении, угол поворота вокруг оси Y1 и оси Y2 является углом наклона в продольном направлении, а угол вокруг оси Z1 и оси Z2 является углом относительно вертикальной оси.
[100] Контроллер 120 может считывать изменение позиции посредством сравнения считываемого значения для каждой оси датчиков 110-1 и 110-2 движения и опорной системы координат.
[101] Фиг. 4 иллюстрирует пример опорной системы координат согласно варианту осуществления настоящего раскрытия сущности.
[102] Ссылаясь на фиг. 4, Z0 обозначает направление гравитации, X0 обозначает восточное направление, и Y обозначает южное направление, когда гибкое устройство размещено в плоском состоянии.
[103] Контроллер 120 может вычислять угол наклона в продольном направлении и угол наклона в поперечном направлении с использованием уравнения (1) и уравнения (2), как описано выше. Контроллер 120 также может вычислять угол наклона в продольном направлении и угол наклона в поперечном направлении посредством вставки считываемых значений, выводимых из датчиков 110-1 и 110-2 движения и опорной системы координат, в уравнение (3):
[104] уравнение 3
[105]
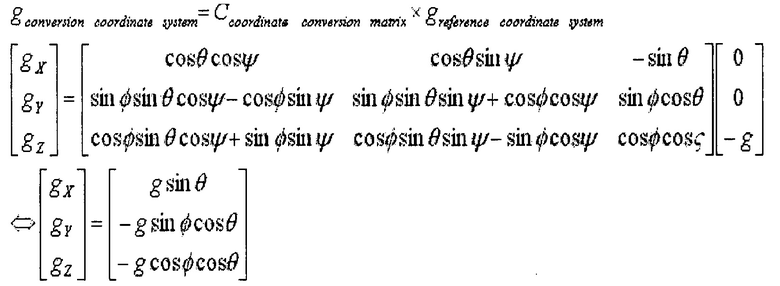
[106] В уравнении (3), обозначает угол наклона в поперечном направлении, θ обозначает угол наклона в продольном направлении, ψ обозначает угол относительно вертикальной оси, и g обозначает гравитацию. Согласно уравнению (3), g-преобразованная система координат вычисляется посредством умножения опорной системы координат и матрицы преобразования координат. В уравнении (3) gx, gy и gz указывают компоненты гравитационного ускорения, которые считываются на осях X, Y и Z. В частности, gx, gy и gz могут быть выходными значениями датчиков ускорения по оси X, Y и Z. θ является углом наклона в продольном направлении, ∅ является углом наклона в поперечном направлении, ψ является углом относительно вертикальной оси, и g является гравитационным ускорением.
[107] Угол наклона в продольном направлении и угол наклона в поперечном направлении могут выражаться посредством переписывания уравнения (3) как уравнения (4):
[108] уравнение 4
[109]
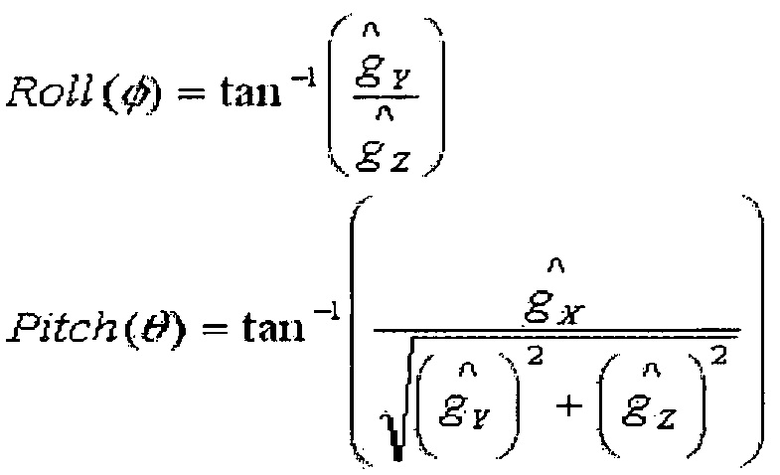
[110] Контроллер 120 может вычислять угол наклона в продольном направлении и угол наклона в поперечном направлении с использованием уравнения (4).
[111] Фиг. 5 является видом, иллюстрирующим форму изгиба, в которой центр гибкого устройства искривляется вверх, согласно варианту осуществления настоящего раскрытия сущности.
[112] Ссылаясь на фиг. 5, когда гибкое устройство изгибается, причем правый край и левый край ориентированы вниз, ось X1 первого датчика 110-1 движения и ось X2 второго датчика 110-2 движения указывают вниз в направлении гравитации. Ось Z1 и ось Z2 указывают друг на друга, а ось Y1 и ось Y2 являются параллельными их предыдущим осевым направлениям.
[113] Фиг. 6А и 6B иллюстрируют изменение считываемого значения датчика движения, когда возникает изгиб, согласно варианту осуществления вследствие настоящего раскрытия сущности.
[114] Ссылаясь на фиг. 6А, ось X1 и ось Z1 первого датчика 110-1 движения, который располагается на правом краю, перемещаются влево по сравнению с осью X0 и осью Z0 опорной системы координат.
[115] Ссылаясь на фиг. 6B, ось X2 и ось Z2 второго датчика 110-2 движения, который располагается на левом краю, перемещаются вправо по сравнению с осью X0 и осью Z0 опорной системы координат.
[116] Когда осевые направления первого и второго датчиков 110-1 и 110-2 движения изменены так, как показано на фиг. 6А и 6B, компонент гравитационного ускорения, который распределен на каждую ось, считывается посредством датчика каждой оси и выводится. Контроллер 120 определяет взаимосвязь между значением X1 и значением X2 и взаимосвязь между значением Z1 и значением Z2 посредством сравнения выходных значений каждой оси. Соответственно, контроллер 120 определяет то, что достигается форма изгиба, в которой центр гибкого устройства 100 искривляется вверх.
[117] Фиг. 7 является видом, иллюстрирующим форму изгиба, в которой центр гибкого устройства искривляется вниз, согласно варианту осуществления настоящего раскрытия сущности.
[118] Ссылаясь на фиг. 7, правый край и левый край гибкого устройства ориентированы вверх посредством изгиба. Соответственно, ось X1 первого датчика 110-1 движения и ось X2 второго датчика 110-2 движения указывают вверх в противоположном направлении по отношению к гравитации. Ось Z1 и ось Z2 указывают в противоположных направлениях, в то время как ось Y1 и ось Y2 являются параллельными их предыдущим осевым направлениям.
[119] Область изгиба и форма изгиба на фиг. 7 являются идентичными области изгиба и форме изгиба на фиг. 5, но направления изгиба являются противоположными друг другу. Соответственно, когда выполняется изгиб по фиг. 5 и 7, ускорения по оси X и ускорения по оси Z имеют противоположные знаки.
[120] Когда выполняется общий изгиб таким образом, что центр искривлен вверх или вниз, как показано на фиг. 5 и 7, изменяются направления осей X1, X2, Z1 и Z2. Как описано выше, изменение направлений осей Z1 и Z2 в отношении оси Z0 означает угол относительно вертикальной оси. Тем не менее, поскольку датчики ускорения считывают идентичное гравитационное ускорение, датчики ускорения не могут измерять угол относительно вертикальной оси. Соответственно, угол относительно вертикальной оси может быть измерен отдельно посредством геомагнитного датчика или гиродатчика, или изгиб/разгибание может быть определен посредством считывания только изменения угла наклона в продольном направлении.
[121] Хотя общий изгиб, при котором центр искривляется вверх или вниз, проиллюстрирован на фиг. 5 и 7, общий изгиб включает в себя изгиб одной краевой области. Когда один из первого и второго датчиков 110-1 и 110-2 движения выводит идентичное значение, а другой датчик выводит измененное значение, контроллер 120 определяет то, что изгибается краевая область, в которой располагается другой датчик. В этом случае, когда изменение выходного значения меньше или равно пороговому значению, контроллер 120 определяет то, что выполняется общий изгиб, при котором изгибается одна краевая область. Когда изменение превышает пороговое значение, контроллер 120 определяет то, что выполняется складывание.
[122] Как описано выше, изгиб может включать в себя изгиб и перемещение, изгиб и перевод в плоское состояние, изгиб и удержание, изгиб и скручивание, скручивание, верчение, встряхивание и прокатывание в дополнение к общему изгибу и складыванию.
[123] Фиг. 8 и 9 являются видами для того, чтобы пояснять скручивание согласно варианту осуществления настоящего раскрытия сущности.
[124] Фиг. 8 иллюстрирует операцию скручивания, в которой правый нижний угол и левый верхний угол гибкого устройства поднимаются в противоположном направлении по отношению к гравитации, и правый верхний угол и левый нижний угол опускаются в направлении гравитации согласно варианту осуществления настоящего раскрытия сущности.
[125] Фиг. 9 иллюстрирует операцию скручивания, в которой правый верхний угол и левый нижний угол гибкого устройства поднимаются в противоположном направлении по отношению к гравитации, и правый нижний угол и левый верхний угол опускаются в направлении гравитации согласно варианту осуществления настоящего раскрытия сущности.
[126] Когда операция скручивания выполняется так, как показано на фиг. 8 и 9, оси X1 и X2 по-прежнему поддерживаются в направлении, идентичном направлению оси X0, но Y1, Y2, оси Z1 и Z2 вращаются в отношении опорной оси. Соответственно, изменяется угол наклона в поперечном направлении. Контроллер 120 вычисляет угол наклона в продольном направлении и угол наклона в поперечном направлении с использованием считываемых значений каждого из первого и второго датчиков 110-1 и 110-2 движения и получает абсолютное значение каждого из угла наклона в продольном направлении и угла наклона в поперечном направлении и изменение знака. Соответственно, определяется то, выполняется или нет операция скручивания.
[127] Фиг. 10 иллюстрирует изгиб и скручивание, в котором общий изгиб выполняется для определенной области, а скручивание выполняется для другой области, согласно варианту осуществления настоящего раскрытия сущности.
[128] Ссылаясь на фиг. 10, область левого края гибкого устройства 100 искривляется вверх, и правый нижний угол поднимается в противоположном направлении по отношению к гравитации. Соответственно, оси первого и второго датчика 110-1 и 110-2 движения изменены так, как показано на фиг. 10. Когда изменение угла наклона в поперечном направлении считывается из первого датчика 110-1 движения, и изменение угла наклона в продольном направлении считывается из второго датчика 110-2 движения, контроллер 120 определяет то, что выполняется изгиб и скручивание. Контроллер 120 определяет степень изгиба с использованием угла наклона в продольном направлении, который вычислен на основе выходных значений второго датчика 110-2 движения. Контроллер 120 может определять степень скручивания с использованием угла наклона в поперечном направлении, который вычислен на основе выходных значений первого датчика 110-1 движения.
[129] Хотя контроллер 120 сравнивает выходные значения датчиков движения в отношении опорной системы координат в вышеописанном варианте осуществления, контроллер 120 может определять изгиб/разгибание в отношении начальной системы координат, которая задается через процесс обучения, помимо опорной системы координат. Когда гибкое устройство 100 размещено в плоском состоянии, и вводится команда пользовательской настройки, контроллер 120 может сохранять считываемые значения каждого датчика движения в этот момент времени в качестве опорного значения. Контроллер 120 определяет изгиб/разгибание посредством сравнения считываемых значений каждого датчика движения и опорного значения.
[130] В вышеописанном варианте осуществления, форма изгиба определяется с использованием двух датчиков движения. Тем не менее, число датчиков движения может превышать два.
[131] Фиг. 11 иллюстрирует конфигурацию гибкого устройства, которое включает в себя три датчика движения, согласно варианту осуществления настоящего раскрытия сущности.
[132] Ссылаясь на фиг. 11, гибкое устройство 100 включает в себя первый датчик 110-1 движения и вторые датчики 110-2 движения, которые располагаются в противоположных краевых областях, и третий датчик 110-3 движения, который располагается в центральной области.
[133] Фиг. 12А и 12B иллюстрируют поперечное сечение гибкого устройства по фиг. 11 согласно варианту осуществления настоящего раскрытия сущности.
[134] Ссылаясь на фиг. 12А, третий датчик 110-3 движения имеет оси X3, Y3 и Z3, которые размещены в форме, идентичной форме первого и второго датчиков 110-1 и 110-2 движения. Третий датчик 110-3 движения может быть размещен в местоположении, в котором изменяется направление изгиба, когда выполняется мультиизгиб, при котором изгибаются две или более областей (т.е. в местоположении, соответствующем точке перегиба).
[135] Ссылаясь на фиг. 12B, когда выполняется мультиизгиб, при котором изгибаются две или более областей, оси Y1, Y2 и Y3 первого-третьего датчиков 110-1-110-3 движения поддерживаются параллельными оси Y0, а оси X1, X2 и X3 и оси Z1, Z2 и Z3 вращаются в отношении осей Y0 и Z0, соответственно. Контроллер 120 вычисляет углы наклона в продольном направлении на основе выходных значений первого-третьего датчиков 110-1-110-3 движения. Контроллер 120 определяет то, выполняется мультиизгиб или нет, посредством сравнения углов наклона в продольном направлении, которые вычислены посредством первого-третьего датчиков 110-1-110-3 движения.
[136] Фиг. 13А и 13B являются видами, иллюстрирующими конфигурацию гибкого устройства, которое включает в себя четыре датчика движения, согласно варианту осуществления настоящего раскрытия сущности.
[137] Ссылаясь на фиг. 13А, первый датчик 110-1 движения и второй датчик 110-2 движения располагаются в противоположных краевых областях, и третий датчик 110-3 и 110-4 движения и четвертый датчик движения располагаются между первым и вторым датчиками 110-1 и 110-2 движения. Оси первого-четвертого датчиков 110-1 и 110-4 движения размещены в идентичных направлениях.
[138] Ссылаясь на фиг. 13B, когда выполняется мультиизгиб, при котором изгибаются три области, оси Y1, Y2, Y3 и Y4 первого-четвертого датчиков 110-1-110-4 движения поддерживаются параллельными оси Y0, а оси X1, X2, X3 и X4 и оси Z1, Z2, Z3 и Z4 вращаются в отношении осей Y0 и Z0, соответственно. Контроллер 120 может вычислять углы наклона в продольном направлении на основе выходных значений первого-четвертого датчиков 110-1-110-4 движения. Контроллер 120 может определять то, выполняется мультиизгиб или нет, посредством сравнения углов наклона в продольном направлении, которые вычислены посредством первого-четвертого датчиков 110-1-110-4 движения.
[139] Когда считываемые значения множества датчиков движения выводятся последовательно, контроллер 120 может определять то, выполняется изгиб и перемещение или нет, на основе этих значений. Изгиб и перемещение, изложенный в данном документе, означает операцию, в которой изгибается одна область, и изогнутая область перемещается в одну сторону.
[140] Фиг. 14 является видом для того, чтобы иллюстрировать способ для определения изгиба и перемещения в гибком устройстве, которое включает в себя три датчика движения, согласно варианту осуществления настоящего раскрытия сущности.
[141] Ссылаясь на фиг. 14, когда выполняется изгиб и перемещение, множество датчиков движения последовательно выводят считываемые значения, соответствующие состоянию изгиба. Первый и второй датчики 110-1 и 110-2 движения располагаются в противоположных краевых областях, и третий датчик 110-3 движения располагается в центральной области.
[142] Фиг. 14 иллюстрирует изгиб и перемещение, который начинается с области, в которой располагается второй датчик 110-2 движения, и перемещается в область, в которой располагается первый датчик 110-1 движения. Когда выполняется изгиб и перемещение, изгиб последовательно перемещается в направлении (a), (b) и (c).
[143] Когда изменение угла наклона в продольном направлении считывается из второго датчика 110-2 движения, который является начальной точкой изгиба, изменение угла наклона в продольном направлении считывается из третьего датчика 110-3 движения после предварительно определенного времени, и затем изменение угла наклона в продольном направлении считывается из первого датчика 110-1 движения снова после предварительно определенного времени, контроллер 120 определяет то, что изгиб последовательно выполняется в направлении (a), (b) и (c).
[144] Фиг. 15 является видом, иллюстрирующим изменения для осей датчиков движения, когда подбрасывание выполняется в гибком устройстве, включающем в себя три датчика движения, согласно варианту осуществления настоящего раскрытия сущности.
[145] Ссылаясь на фиг. 15, когда пользователь держит противоположные края гибкого устройства 100 и подбрасывает гибкое устройство 100, центр гибкого устройства 100 поднимается в последовательности (I), (II) и (III). Осевые направления первого и второго датчиков 110-1 и 110-2 движения изменены посредством изгиба, и за счет этого изменяется компонент гравитационного ускорения, считываемый из каждой оси. Третий датчик 110-3 движения имеет ускорение в направлении вверх, когда гибкое устройство 100 подброшено. Соответственно, изменяется выходное значение оси Z.
[146] Когда выходные значения первого и второго датчиков 110-1 и 110-2 движения считываются с различными знаками, и уменьшается выходное значение оси Z3 третьего датчика 110-3 движения, контроллер 120 определяет то, что общий изгиб, при котором подброшено гибкое устройство, выполняется однократно.
[147] Когда центр гибкого устройства изгибается так, как показано на фиг. 15, и затем изгибается в противоположном направлении, и эти операции изгиба попеременно повторяются, контроллер 120 определяет то, что выполняется верчение.
[148] Контроллер 120 может определять другие операции изгиба, такие как встряхивание и прокатывание, на основе изменений выходных значений множества датчиков движения.
[149] Фиг. 16 и 17 являются видами, иллюстрирующими изменения для осей датчиков движения, когда выполняется встряхивание, согласно варианту осуществления настоящего раскрытия сущности. Встряхивание, изложенное в данном документе, означает операцию держания краевой области гибкого устройства 100 одной рукой и встряхивания гибкого устройства 100.
[150] Ссылаясь на фиг. 16 и 17, когда пользователь держит левый край гибкого устройства 100 и имеет правый край, указывающий вниз, и встряхивает гибкое устройство 100, направление изгиба в каждой точке изменяется попеременно. Соответственно, осевые направления датчиков 110-1-110-3 движения изменяются с регулярным шаблоном, как показано на фиг. 16 и 17. Контроллер 120 определяет то, что выполняется встряхивание, на основе выходных значений датчика 110-1-110-3 движения.
[151] Число и местоположения размещения датчиков 110-1-110-3 движения могут задаваться различными способами, как описано выше.
[152] Фиг. 18-21 являются видами для того, чтобы иллюстрировать различные примеры конфигурации гибкого устройства, в котором располагаются множество датчиков движения, согласно варианту осуществления настоящего раскрытия сущности.
[153] Ссылаясь на фиг. 18, четыре датчика 110-1-110-4 движения размещены в углах гибкого устройства 100.
[154] Фиг. 19 иллюстрирует множество датчиков движения, которые располагаются по всей поверхности гибкого устройства, согласно варианту осуществления настоящего раскрытия сущности.
[155] Ссылаясь на фиг. 19, множество датчиков 110-1-110-14 движения располагаются вдоль края гибкого устройства 100, и множество датчиков 110-15-110-17 движения располагаются в центре.
[156] Фиг. 20 иллюстрирует гибкое устройство 100, в котором множество датчиков 110-1-110-4 движения располагаются в углах, и датчик 110-5 движения располагается в центре.
[157] Фиг. 21 иллюстрирует гибкое устройство 100, в котором множество датчиков 110-1-110-4 движения располагаются в центре каждого края, и датчик 110-5 движения располагается в центре.
[158] Контроллер 120 может определять то, выполняется прокатывание или нет, на основе результата считывания посредством датчиков 110-1-110-n движения. Прокатывание означает операцию перемещения гибкого устройства вдоль поверхности. Когда выполняется прокатывание, ось датчика движения, который располагается на краевой области, вращается более чем на 360°, и, соответственно, считываемое значение датчика движения повторяется с идентичным периодом шаблона. Контроллер 120 может определять то, выполняется прокатывание или нет, на основе изменения этого считываемого значения.
[159] Изгиб и перевод в плоское состояние или изгиб и удержание могут быть определены на основе времени, в течение которого поддерживается состояние изгиба. Когда изгиб считывается и удерживается в течение предварительно определенного времени, контроллер 120 определяет то, что выполняется изгиб и удержание. Контроллер 120 может определять то, выполняется изгиб и удержание или нет, с использованием таймера. Когда считывается изгиб, а затем считывается плоское состояние, контроллер 120 может определять то, что выполняется изгиб и перевод в плоское состояние.
[160] В вышеприведенных примерах, датчик движения состоит только из датчика ускорения. Тем не менее, датчик движения также может включать в себя геомагнитный датчик или гиродатчик.
[161] Когда датчик движения реализован посредством использования геомагнитного датчика, датчик движения может считывать азимут на основе выходного значения двухосевого или трехосевого магнетометра, который считывает магнитное поле земли. Когда ось Z размещена в направлении, идентичном направлению вектора магнитного поля земли, может задаваться опорная система координат геомагнитного датчика. Направление вращаемого датчика движения определяется посредством сравнения считываемого азимута и опорной системы координат.
[162] Когда датчик движения реализован посредством использования трехосевого геомагнитного датчика-магнетометра, контроллер 120 может нормализовать выходные значения магнетометров по оси X, Y и Z, чтобы преобразовывать магнетометры в пределах предварительно определенного диапазона нормализации. Нормализация может выполняться на основе уравнения, имеющего форму, идентичную форме уравнения (1). Коэффициенты нормализации, такие как значение смещения и цена деления шкалы, вычисляются с использованием минимального значения и максимального значения из числа выходных значений магнетометров по оси X, Y и Z, и нормализация выполняется с использованием коэффициентов нормализации. Коэффициенты нормализации, такие как значение смещения и цена деления шкалы, могут вычисляться заранее и сохраняться в хранилище 130. Когда отсутствуют вычисленные и заранее сохраненные значения смещения или цены деления шкалы, гибкое устройство, включающее в себя геомагнитный датчик, размещено в плоском состоянии, максимальное значение и минимальное значение измеряются посредством однократного вращения гибкого устройства, и значение смещения и цена деления шкалы вычисляются посредством применения измеренных значений к уравнению (1) и сохраняются.
[163] Когда выполняется нормализация, контроллер 120 может вычислять азимут посредством применения результирующего значения к следующему уравнению. Уравнение для вычисления азимута может быть задано различными способами. Например, азимут может быть вычислен посредством уравнения (5):
[164] уравнение 5
[165]

[166] В уравнении (5), λ является азимутом. Когда гибкое устройство является плоским, азимут может быть углом относительно вертикальной оси. Выходное значение по оси X и выходное значение по оси Y могут означать значения, которые получены посредством нормализации выходных значений магнетометров по оси X и по оси Y. Уравнение (5) может использоваться, когда датчик движения реализован посредством использования только двухосевого геомагнитного датчика-магнетометра.
[167] Когда датчик движения включает в себя как трехосевой геомагнитный датчик-магнетометр, так и датчик ускорения, угол относительно вертикальной оси может вычисляться точнее с использованием угла наклона в продольном направлении и угла наклона в поперечном направлении, которые вычислены посредством датчика ускорения. Контроллер 120 может вычислять угол относительно вертикальной оси с использованием уравнения (6):
[168] уравнение 6
[169]
[170] В уравнении (6), Xnorm, Ynorm и Znorm являются значениями, которые получены посредством нормализации выходных значений осей геомагнитного датчика-магнетометра по оси X, Y и Z, θ является углом наклона в продольном направлении, и ∅ является углом наклона в поперечном направлении. Уравнение (6) является уравнением, которое задается, когда значение оси Z, перпендикулярной горизонтальной поверхности, задается в качестве отрицательного числа. Уравнение (6) можно иметь измененный знак согласно форме размещения оси трехосевого магнетометра в геомагнитном датчике, который монтируется в гибком устройстве 100.
[171] Когда датчик движения реализован посредством использования гиродатчика, относительная позиция, которая изменяется относительно предыдущей позиции посредством вращения, вычисляется посредством интегрирования угловой скорости вращения, которая считывается посредством гиродатчика, когда точка, в которой размещен гиродатчик, перемещается относительно времени. Алгоритм для вычисления относительной позиции может представлять собой известные алгоритмы. Например, может использоваться алгоритм на основе кватернионов. Контроллер 120 может определять совокупное движение посредством сравнения относительных позиций, считываемых посредством датчиков движения.
[172] Фиг. 22 является системой для управления внешним устройством с использованием гибкого устройства согласно различным вариантам осуществления настоящего раскрытия сущности.
[173] Ссылаясь на фиг. 22, внешнее устройство реализовано посредством использования устройства 100 отображения, такого как телевизионный приемник (телевизор). Гибкое устройство 100 может подключаться к устройству отображения проводным или беспроводным способом.
[174] Когда считывается множество форм изгиба, как описано выше, гибкое устройство 100 передает управляющий сигнал, соответствующий форме изгиба, в устройство 100 отображения. Хранилище 130 сохраняет информацию относительно различных команд управления, соответствующих формам изгиба. Команда управления может представлять собой цифровой код, который состоит из комбинации значений кодов, таких как 0 и 1. Контроллер 130 может передавать команду управления с использованием IR-индикатора или может передавать команду управления различными способами беспроводной связи, такими как технология Bluetooth, Wi-Fi, ZigBee и NFC, и может подключаться к проводному интерфейсу, такому как USB, и может передавать команду управления.
[175] Устройство 200 отображения может выполнять различные операции согласно управляющему сигналу, который передается из гибкого устройства 100. Например, устройство 100 отображения может выполнять различные операции, такие как включение, выключение, переключение каналов, регулировка громкости, выполнение приложения, перемещение курсора, воспроизведение контента, просмотр веб-страниц, переворачивание страницы и регулирование качества изображений.
[176] Хотя фиг. 22 иллюстрирует систему для управления внешним устройством, гибкое устройство может передавать команду управления на веб-сервер или другие различные внешние серверы и может предоставлять услуги, соответствующие форме изгиба.
[177] Фиг. 23 является блок-схемой, иллюстрирующей конфигурацию гибкого устройства отображения согласно варианту осуществления настоящего раскрытия сущности.
[178] Ссылаясь на фиг. 23, гибкое устройство отображения означает устройство, которое имеет гибкость и имеет функцию отображения. Гибкое устройство 100 отображения включает в себя множество датчиков 110-1-110-n движения, контроллер 120, хранилище 130, датчик 140 изгиба, датчик 150 касания и дисплей 160.
[179] Контроллер 120 может считывать форму изгиба с использованием множества датчиков 110-1-110-n движения, как описано в вышеописанных различных вариантах осуществления. Тем не менее, контроллер 120 также может считывать форму изгиба с использованием датчика 140 изгиба и датчика 150 касания. Датчик 140 изгиба включает в себя датчик изгиба, и датчик 150 касания включает в себя датчик касания. Это описывается ниже.
[180] Дисплей 160 отображает различные экраны под управлением контроллера 120. Дисплей 160 может отображать экран рабочего стола, включающий в себя различные значки, экран блокировки, экран ожидания, экран выполнения приложения, экран воспроизведения контента, экран папок и экран просмотра веб-страниц. Контроллер 120 может конфигурировать экран, соответствующий форме изгиба, и отображать экран на дисплее 160. Ниже описывается пример операции, соответствующей форме изгиба. Дисплей 160 должен иметь такую гибкость, что он изгибается вместе с корпусом гибкого устройства.
[181] Фиг. 24 является видом, иллюстрирующим пример конфигурации дисплея согласно варианту осуществления настоящего раскрытия сущности.
[182] Ссылаясь на фиг. 24, дисплей 160 включает в себя подложку 111, формирователь 112 сигналов управления, панель 113 отображения и защитный слой 114.
[183] Подложка 111 может представлять собой пластиковую подложку (например, полимерную пленку), которая является деформируемой посредством внешнего давления. Пластиковая подложка имеет структуру, которая формируется посредством противоположных поверхностей с барьерным покрытием несущей пленки. Несущая пленка может быть реализована с использованием различных смол, таких как полиимид (PI), поликарбонат (PC), полиэтилентерефталат (PET), полиэфирсульфон (PES), полиэтиленнафталат (PEN) и волокнит (FRP). Барьерное покрытие выполняется на противоположных поверхностях несущей пленки. Органическая мембрана или неорганическая мембрана может использоваться в целях поддержания гибкости. Подложка 111 также может формироваться из гибкого материала, такого как тонкое стекло или металлическая фольга.
[184] Формирователь 112 сигналов управления возбуждает панель 113 отображения. Формирователь 112 сигналов управления прикладывает напряжение возбуждения ко множеству пикселов, которые составляют панель 113 отображения и могут быть реализованы посредством использования TFT на основе a-Si, TFT на основе низкотемпературного поликристаллического кремния (LTPS) или органического TFT (OTFT) и т.д. Формирователь 112 сигналов управления также может быть реализован в различных формах согласно форме панели 113 отображения.
[185] Например, панель 113 отображения может включать в себя органическое светоизлучающее вещество, которое включает в себя множество пиксельных ячеек, и электродный слой, который покрывает противоположные поверхности органического светоизлучающего вещества. Формирователь 112 сигналов управления может включать в себя множество транзисторов, соответствующих множеству пиксельных ячеек панели 113 отображения. Контроллер 130 прикладывает электрический сигнал к затвору каждого транзистора и управляет пиксельными ячейками, подключенными к транзисторам, так чтобы излучать свет. Соответственно, отображаются различные экраны.
[186] Панель 113 отображения может быть реализована посредством использования электролюминесцентного дисплея (EL), электрофоретического дисплея (EPD), электрохромного дисплея (ECD), жидкокристаллического дисплея (ЖК-дисплея), ЖК-дисплея с активной матрицей (AMLCD) и плазменной панели отображения (PDP), в дополнение (или вместо) органического светоизлучающего диода (OLED). Когда панель 113 отображения осуществлена посредством ЖК-дисплея, панель 113 отображения не может излучать свет самостоятельно и в силу этого может требовать отдельного блока задней подсветки. Когда ЖК-дисплей не использует заднюю подсветку, ЖК-дисплей может использовать окружающий свет. Чтобы использовать жидкокристаллическую панель отображения 113 без блока задней подсветки, может использоваться такое окружение, как наружное окружение, которое допускает большое количество света, с тем чтобы управлять ЖК-дисплеем.
[187] Защитный слой 114 защищает панель 113 отображения. Например, защитный слой 114 может быть изготовлен из ZrO, CeO2 или ThO2. Защитный слой 114 может быть изготовлен в качестве прозрачной пленки и может покрывать всю поверхность панели 113 отображения.
[188] В отличие от фиг. 24, дисплей 160 также может быть реализован посредством использования электронной бумаги. Электронная бумага представляет собой дисплей, который применяет общие характеристики чернил к бумаге, и отличается от общего плоскопанельного дисплея тем, что она использует отраженный свет. Электронная бумага может изменять изображение или текст с использованием злектрофореза, который использует закручивающийся шар или капсулу.
[189] Когда дисплей 160 включает в себя элементы, которые изготовлены из прозрачного материала, дисплей 160 может быть реализован как устройство отображения, которое является изгибаемым и прозрачным. Например, когда подложка 111 изготавливается из полимерного материала, такого как пластмасса, имеющая прозрачность, формирователь 112 сигналов управления реализуется посредством использования прозрачного транзистора, и панель 113 отображения реализуется посредством использования прозрачного органического светоизлучающего слоя и прозрачного электрода, дисплей 160 может иметь прозрачность.
[190] Прозрачный транзистор означает транзистор, который изготавливается посредством замены непрозрачного кремния существующего тонкопленочного транзистора прозрачным материалом, таким как оксид цинка или оксид титана. Прозрачный электрод может изготавливаться из усовершенствованных материалов, таких как оксид индия и олова (ITO) или графен. Графен означает материал, который имеет планарную структуру сотовой формы, в которой атомы углерода соединяются между собой, и имеет прозрачность. Прозрачный органический светоизлучающий слой может быть реализован посредством использования различных материалов.
[191] Дисплей 160 может формироваться во всей области или в некоторых областях гибкого устройства 100 отображения. Датчики 110-1-110-n движения, датчик 140 изгиба и датчик 150 касания, описанные выше, могут предоставляться в дисплее 160 и могут считывать то, изгибается дисплей 160 или нет.
[192] В вышеописанных вариантах осуществления, контроллер 120 может определять форму изгиба с использованием результата считывания посредством датчика 140 изгиба в дополнение к результату считывания посредством датчиков движения. Датчик 140 изгиба может включать в себя датчик изгиба. Число и форма датчиков изгиба являются переменными. Ниже описываются различные примеры формы датчика изгиба и соответствующий способ для считывания изгиба.
[193] СПОСОБ ДЛЯ СЧИТЫВАНИЯ ИЗГИБА С ИСПОЛЬЗОВАНИЕМ ДАТЧИКА ИЗГИБА
[194] Фиг. 25-38 являются видами для того, чтобы иллюстрировать различные способы для считывания формы изгиба гибкого устройства отображения с использованием датчика изгиба согласно варианту осуществления настоящего раскрытия сущности.
[195] Ссылаясь на фиг. 25, гибкое устройство 100 отображения может включать в себя датчик изгиба, который располагается на одной поверхности, такой как передняя поверхность или задняя поверхность дисплея 160, или датчик изгиба, который располагается на противоположных поверхностях дисплея 160. Датчик 140 изгиба принимает значение, считываемое посредством датчика изгиба, и передает значение в контроллер 120.
[196] Датчик изгиба означает датчик, который может быть изогнут и имеет значение сопротивления, которое варьируется согласно степени изгиба. Датчик изгиба может быть реализован в различных формах, к примеру, как волоконно-оптический датчик изгиба, датчик давления и тензодатчик.
[197] Датчик 120 может считывать значение сопротивления датчика изгиба с использованием уровня напряжения, приложенного к датчику изгиба, или силы тока, протекающего в датчике изгиба, и может считывать изгиб в местоположении датчика изгиба согласно считываемому значению сопротивления.
[198] На фиг. 25, датчики изгиба могут встраиваться в переднюю поверхность дисплея 160. Тем не менее, это представляет собой просто пример, и датчики изгиба могут встраиваться в заднюю поверхность дисплея 160 либо могут встраиваться в обе поверхности. Формы, число и местоположения датчиков изгиба также могут изменяться различными способами. Например, один датчик изгиба или множество датчиков изгиба могут соединяться с дисплеем 160. Один датчик изгиба может считывать одни данные изгиба и может иметь множество считывающих каналов, чтобы считывать множество данных изгиба.
[199] Фиг. 25 иллюстрирует пример множества столбиковых датчиков изгиба, которые размещаются в вертикальном направлении и горизонтальном направлении в сетчатом шаблоне.
[200] Ссылаясь на фиг. 25, датчик изгиба включает в себя датчики 21-1-21-5 изгиба, которые размещаются в первом направлении, и датчики 22-1-22-5 изгиба, которые размещаются во втором направлении, которое является перпендикулярным первому направлению. Датчики изгиба располагаются на большом предварительно определенном расстоянии друг от друга.
[201] На фиг. 25, пять датчиков изгиба (21-1-21-5, 22-1-22-5) размещаются в каждом из горизонтального направления и вертикального направления в сетчатой конструкции. Тем не менее, это представляет собой просто пример, и число датчиков изгиба может изменяться согласно размеру гибкого устройства отображения. Датчики изгиба размещаются в горизонтальном направлении и вертикальном направлении, чтобы считывать изгиб из всей области гибкого устройства отображения. Соответственно, когда только часть устройства отображения является гибкой, или когда гибкое устройство отображения должно считывать изгиб только из части устройства, датчик изгиба может размещаться только в соответствующей части устройства.
[202] Каждый из датчиков 21-1-21-5, 22-1-22-5 изгиба может быть реализован посредством использования датчика электрического сопротивления, который использует электрическое сопротивление, или микроволоконно-оптического датчика, который использует деформацию оптоволокна. Ниже описывается датчик изгиба при допущении, что датчик изгиба представляет собой датчик электрического сопротивления для удобства пояснения.
[203] Ссылаясь на фиг. 26, когда гибкое устройство 100 отображения изгибается таким образом, что центральная область в отношении левого и правого краев ориентирована вниз, натяжение, вызываемое посредством изгиба, прикладывается к датчикам 21-1-21-5 изгиба, которые размещаются в горизонтальном направлении. Соответственно, изменяется значение сопротивления каждого из датчиков 21-1-21-5 изгиба, размещаемых в горизонтальном направлении. Датчик 140 изгиба считывает изменение выходного значения, выводимого из каждого датчика 21-1-21-5 изгиба, и за счет этого определяет то, что изгиб выполняется в горизонтальном направлении в отношении центра поверхности отображения.
[204] На фиг. 26, центральная область изгибается в направлении вниз (в направлении Z-), которое является перпендикулярным поверхности отображения. Тем не менее, даже когда центральная область изгибается в направлении вверх (в направлении по оси Z+) в отношении поверхности отображения, изгиб может считываться на основе изменения выходных значений датчиков 21-1-21-5 изгиба, размещаемых в горизонтальном направлении. Фиг. 10 иллюстрирует изгиб в направлении по оси Z+.
[205] Ссылаясь на фиг. 27, когда гибкое устройство 100 отображения изгибается таким образом, что центральная область в отношении верхнего и нижнего краев ориентирована вверх, натяжение прикладывается к датчикам 22-1-22-5 изгиба, которые размещаются в вертикальном направлении. Датчик 140 изгиба может считывать деформацию формы вертикального направления на основе выходных значений датчиков 22-1-22-5 изгиба, размещаемых в вертикальном направлении.
[206] Хотя изгиб в направлении по оси Z+ проиллюстрирован на фиг. 27, изгиб в направлении Z- также может считываться с использованием датчиков 22-1-22-5 изгиба, которые размещаются в вертикальном направлении. Фиг. 28 иллюстрирует изгиб в направлении Z-.
[207] Когда деформация формы возникает в диагональном направлении, натяжение прикладывается ко всем датчикам изгиба, которые размещаются в горизонтальном направлении и вертикальном направлении. Соответственно, деформация формы диагонального направления может считываться на основе выходных значений датчиков изгиба, которые размещаются в горизонтальном и вертикальном направлениях.
[208] Когда гибкое устройство 100 отображения изгибается, датчики изгиба, которые размещаются на одной поверхности или противоположных поверхностях гибкое устройство 100 отображения, также изгибаются и имеют значения сопротивления, соответствующие абсолютной величине приложенного натяжения, и выходные значения, соответствующие значениям сопротивления.
[209] Абсолютная величина натяжения увеличивается пропорционально степени изгиба. Например, когда наибольшая степень изгиба возникает в центральной области, наибольшее натяжение прикладывается к датчику изгиба, который располагается в центральной области, и датчик изгиба имеет наибольшее значение сопротивления. С другой стороны, степень изгиба снижается к внешней стороне. Соответственно, датчик изгиба имеет меньшие значения сопротивления по мере того, как датчик изгиба отдаляется от центра.
[210] Когда значение сопротивления, выводимое из датчика изгиба, имеет наибольшее значение в конкретной точке и постепенно снижается в направлениях наружу, датчик 140 изгиба может определять то, что наиболее значительно изгибается область, из которой считывается наибольшее значение сопротивления. Когда область не имеет изменения значения сопротивления, датчик 140 изгиба определяет то, что область представляет собой плоскую область, в которой не выполняется изгиб. Когда область имеет значение сопротивления, измененное более чем на предварительно определенное значение, определяет то, что область представляет собой изогнутую область, в которой возникает степень изгиба.
[211] Контроллер 120 может считывать размер линии изгиба, направление линии изгиба, местоположение линии изгиба, число линий изгиба, число раз, когда выполняется изгиб, скорость изгиба деформации формы, размер области изгиба, местоположение области изгиба и число областей изгиба на основе взаимосвязи между точками, в которых считывается изменение значения сопротивления.
[212] Когда расстояние между точками, в которых считывается изменение значения сопротивления, находится в пределах предварительно определенного расстояния, точки считываются в качестве одной области изгиба. С другой стороны, когда расстояние между точками, в которых считывается изменение значения сопротивления, находится за пределами предварительно определенного расстояния, различные области изгиба разграничиваются в отношении этих точек.
[213] Складывание означает состояние, в котором гибкое устройство 100 отображения изгибается более чем на предварительно определенный угол. Когда значение сопротивления, считываемое посредством датчика 140 изгиба, превышает или равно предварительно определенному значению, гибкое устройство 100 отображения определяет то, что выполняется складывание. Когда значение сопротивления меньше предварительно определенного значения, гибкое устройство 100 отображения определяет то, что выполняется общий изгиб.
[214] Когда гибкое устройство 100 отображения является изгибаемым до такой степени, что два края пересекаются между собой, контроллер 130 может определять то, представляет собой изгиб складывание или нет, также с учетом касания. Когда правый край гибкого устройства 100 отображения изгибается в направлении по оси Z+ и складывается к передней поверхности, области еще дальше друг от друга приводятся в соприкосновение друг с другом на передней поверхности гибкого устройства отображения. В этом случае, касание считывается в одной области поверхности отображения, и изменение значения сопротивления превышает это изменение при нормальном изгибе. Соответственно, контроллер 120 вычисляет расстояние от края, в котором возникает изгиб, до линии изгиба, и когда касание считывается в точке, которая находится еще дальше от линии изгиба в противоположном направлении не менее чем на вычисленное расстояние, контроллер 120 определяет то, что выполняется складывание.
[215] Когда выполняется складывание, область складывания разделена на две области в отношении линии складывания. Линия складывания означает линию, которая соединяет точки, в которых наибольшее значение сопротивления выводится в каждой области складывания. Смысл линии сгиба может быть идентичным смыслу линии складывания.
[216] Когда считывается складывание, контроллер 120 может выполнять операцию, отличную от операции нормального изгиба. Например, контроллер 120 может отображать различный экран в каждой области складывания.
[217] Как описано выше, гибкое устройство 100 отображения может прокатываться как бумага. Контроллер 120 может определять то, выполняется прокатывание или нет, с использованием считывания результата посредством датчиков 110-1-110-n движения. Ниже описывается способ для определения прокатывания с использованием датчика изгиба.
[218] Фиг. 28-30 являются видами для того, чтобы иллюстрировать способ для считывания прокатывания гибкого устройства отображения согласно варианту осуществления настоящего раскрытия сущности.
[219] Ссылаясь на фиг. 28-30, прокатывание также определяется на основе угла изгиба. Например, если изгиб, больший предварительно определенного угла изгиба, считывается для предварительно определенной области, изгиб соответствует деформации при прокатывании. С другой стороны, если изгиб, меньший предварительно определенного угла изгиба, считывается в области, относительно меньшей области прокатывания, изгиб соответствует деформации при складывании. Нормальный изгиб, складывание и прокатывание, описанные выше, могут быть определены на основе радиуса кривизны, помимо угла изгиба.
[220] Состояние, в котором прокатанное гибкое устройство 100 отображения имеет практически круглое поперечное сечение или овальное поперечное сечение, может задаваться таким образом, что оно соответствует прокатыванию, независимо от радиуса кривизны.
[221] Фиг. 28 иллюстрирует вид в поперечном сечении, когда прокатывается гибкое устройство 100 отображения. Как описано выше, когда прокатывается гибкое устройство 100 отображения, натяжение прикладывается к датчикам изгиба, которые размещаются на одной поверхности или на противоположных поверхностях гибкого устройства отображения. В этом случае, поскольку абсолютные величины натяжения, приложенного к датчикам изгиба считаются аналогичными в пределах предварительно определенного диапазона, значения сопротивления, выводимые из датчиков изгиба, также являются аналогичными в пределах предварительно определенного диапазона.
[222] Чтобы выполнять прокатывание, изгиб должен выполняться так, что он имеет кривизну, большую предварительно определенную кривизну. Когда выполняется прокатывание, формируется область изгиба, большая области изгиба для нормального изгиба или складывания. Соответственно, когда изгиб с углом, превышающим предварительно определенный угол изгиба, выполняется непрерывно для области, большей предварительно определенного размера, контроллер 120 определяет то, что выполняется прокатывание. В состоянии прокатывания, передняя поверхность и задняя поверхность гибкого устройства отображения приводятся в соприкосновение друг с другом. Например, как показано на фиг. 28, когда один край гибкого устройства 100 отображения изгибается в направлении по оси Z+ и прокатывается внутрь поверхности отображения, поверхности отображения (т.е. передняя поверхность и задняя поверхность, на которых располагается датчик изгиба 50-1) приводятся в соприкосновение друг с другом.
[223] Соответственно, в другом примере, контроллер 120 может определять то, прокатывается гибкое устройство 100 отображения или нет, согласно тому, приводятся передняя поверхность и задняя поверхность гибкого устройства 100 отображения в соприкосновение друг с другом или нет. В этом случае, датчик 140 изгиба может включать в себя датчик 150 касания, как описано выше. Когда значения сопротивления, выводимые из датчиков изгиба, являются аналогичными в пределах предварительно определенного диапазона, и касание считывается посредством датчиков касания, расположенных на передней поверхности и задней поверхности гибкого устройства отображения, контроллер 120 определяет то, что прокатывается гибкое устройство отображения. Контроллер 120 может определять то, изгибается гибкое устройство 100 отображения или нет, и некоторые области гибкого устройства 100 отображения приводятся в соприкосновение друг с другом или приближаются друг к другу, с использованием магнитного датчика, оптического датчика или бесконтактного датчика вместо датчика касания.
[224] Фиг. 29 и 30 являются видами для того, чтобы иллюстрировать способ для разграничения области прокатывания согласно варианту осуществления настоящего раскрытия сущности.
[225] Ссылаясь на фиг. 29 и 30, область прокатывания означает всю область гибкого устройства отображения, которое изгибается и прокатывается. Аналогично нормальному изгибу или складыванию, область прокатывания означает одну либо две или более областей, которые включают в себя все точки датчиков изгиба, в которых выводятся значения сопротивления, отличные от значений сопротивления в исходном состоянии. Способ для задания и разделения области прокатывания является идентичным способу области изгиба или складывания, и в силу этого лишнее пояснение опускается.
[226] Когда гибкое устройство 100 отображения прокатывается полностью, как показано на фиг. 29, вся область 51 гибкого устройства 100 отображения задается в качестве области прокатывания. Когда гибкое устройство 100 отображения прокатывается частично, и точки, в которых значения сопротивления, отличающиеся от значений сопротивления в исходном состоянии, выводятся и отстоят друг от друга на предварительно определенное расстояние, как показано на фиг. 30, то частичные области 52 и 53 гибкого устройства 100 отображения разграничиваются в качестве различных областей прокатывания.
[227] Как описано выше, гибкое устройство 100 отображения изгибается в различных формах, и контроллер 120 считывает каждое состояние изгиба на основе результата считывания посредством датчика 140 изгиба. Контроллер 120 может считывать форму изгиба, местоположение изгиба и направление изгиба на основе результата считывания посредством датчика 140 изгиба.
[228] Фиг. 31 и 32 являются видами для того, чтобы иллюстрировать способ для определения степени изгиба согласно варианту осуществления настоящего раскрытия сущности.
[229] Ссылаясь на фиг. 31 и 32, гибкое устройство 100 отображения определяет степень изгиба гибкого устройства 100 отображения с использованием изменения значения сопротивления, выводимого из датчика изгиба с предварительно определенным интервалом.
[230] Контроллер 120 вычисляет разность между значением сопротивления точки, в которой выводится наибольшее значение сопротивления датчика изгиба, и значением сопротивления, выводимым в точке, которая располагается на большом предварительно определенном расстоянии от точки наибольшего значения сопротивления.
[231] Контроллер 120 определяет степень изгиба с использованием вычисленной разности в значении сопротивления. Гибкое устройство 100 отображения разделяет степень изгиба на множество уровней, сопоставляет каждый уровень со значением сопротивления в предварительно определенном диапазоне и сохраняет совпадающие значения.
[232] Соответственно, гибкое устройство 100 отображения определяет степень изгиба согласно тому, какой уровень из множества уровней соответствует вычисленной разности значений сопротивления.
[233] Например, как показано на фиг. 31 и 32, степень изгиба определяется на основе разности между значением сопротивления, выводимым в точке a5, в которой датчик 61 изгиба, расположенный на задней поверхности гибкого устройства 100 отображения, выводит наибольшее значение сопротивления, и значением сопротивления, выводимым в точке a4, которая располагается на большом предварительно определенном расстоянии от точки a5.
[234] Уровень, соответствующий разности значений сопротивления, которая вычисляется в варианте осуществления на фиг. 31 и 32, идентифицируется из множества предварительно сохраненных уровней, и степень изгиба определяется на основе идентифицированного уровня. Степень изгиба может быть представлена посредством угла изгиба или интенсивности изгиба.
[235] Поскольку степень изгиба, проиллюстрированная на фиг. 32, превышает степень изгиба по фиг. 31, разность между значением сопротивления, выводимым в точке a5, и значением сопротивления, выводимым в точке a4, в варианте осуществления, показанном на фиг. 32, превышает разность между значением сопротивления, выводимым в точке a5, и значением сопротивления, выводимым в точке a4, в варианте осуществления, показанном на фиг. 31. Соответственно, когда гибкое устройство 100 отображения изгибается так, как показано на фиг. 32, контроллер 120 может определять то, что повышается степень изгиба.
[236] Контроллер 120 может выполнять надлежащую операцию согласно степени изгиба. Например, когда степень изгиба увеличивается в то время, когда выполняется операция переключения каналов, контроллер 120 может увеличивать скорость переключения каналов или может расширять диапазон переключения каналов. С другой стороны, когда снижается степень изгиба, переключение каналов выполняется более медленно или для меньшего числа каналов. Регулировка громкости или преобразование контента может выполняться по-разному согласно степени изгиба.
[237] Как описано выше, гибкое устройство 100 отображения может быть изогнуто в различных направлениях, в направлении по оси Z+ или в направлении по оси Z-.
[238] Направление изгиба может считываться различными способами. Например, два датчика изгиба могут быть расположены один на другом, и направление изгиба определяется на основе разности изменения значения сопротивления каждого датчика изгиба. Ниже описывается способ для считывания направления изгиба с использованием перекрывающихся датчиков изгиба со ссылкой на фиг. 33-35.
[239] Для удобства пояснения, на фиг. 33-35 способ поясняется при условии, что выполняется нормальный изгиб. Тем не менее, идентичный способ может применяться к складыванию или прокатыванию.
[240] Ссылаясь на фиг. 33, два датчика 71 и 72 изгиба могут быть расположены с перекрытием друг друга на одной стороне дисплея 160. В этом случае, когда изгиб выполняется в одном направлении, различные значения сопротивления выводятся из верхнего датчика 71 изгиба и нижнего датчика 72 изгиба в точке, в которой выполняется изгиб. Соответственно, направление изгиба может быть определено посредством сравнения значений сопротивления двух датчиков 71 и 72 изгиба в идентичной точке.
[241] Когда гибкое устройство 100 отображения изгибается в направлении по оси Z+, как показано на фиг. 34, натяжение, приложенное к нижнему датчику 72 изгиба, превышает натяжение верхнего датчика 71 изгиба в точке A, соответствующей линии изгиба.
[242] С другой стороны, если гибкое устройство 100 отображения изгибается к задней поверхности, как показано на фиг. 35, натяжение, приложенное к верхнему датчику 71 изгиба, превышает натяжение нижнего датчика 72 изгиба.
[243] Соответственно, контроллер 120 считывает направление изгиба посредством сравнения значений сопротивления двух датчиков 71 и 72 изгиба в точке A.
[244] Хотя два датчика изгиба располагаются с перекрытием друг друга на одной стороне дисплея 160 на фиг. 33-35, датчики изгиба могут быть расположены на противоположных поверхностях дисплея 110.
[245] Фиг. 36 иллюстрирует два датчика 71 и 72 изгиба, которые располагаются на противоположных поверхностях дисплея 160. Соответственно, когда гибкое устройство 100 отображения изгибается в первом направлении, перпендикулярном экрану (т.е. в направлении по оси Z+), датчик изгиба, который располагается на первой поверхности из противоположных поверхностей дисплея 160, подвергается сжимающей силе, тогда как датчик изгиба, который располагается на второй поверхности, подвергается натяжению. С другой стороны, когда гибкое устройство 100 отображения изгибается во втором направлении, противоположном первому направлению (в дальнейшем в этом документе, в направлении по оси Z), датчик изгиба, расположенный на второй поверхности, подвергается сжимающей силе, тогда как датчик изгиба, расположенный на первой поверхности, подвергается натяжению. Как описано выше, различные значения обнаруживаются из двух датчиков изгиба согласно направлению изгиба, и контроллер 120 определяет направление изгиба согласно характеристике обнаружения значения.
[246] Хотя направление изгиба считывается с использованием двух датчиков изгиба на фиг. 33-36, направление изгиба может считываться только с использованием тензодатчика, расположенного на одной поверхности дисплея 160. Сжимающая сила или натяжение прикладывается к тензодатчику, расположенному на одной поверхности, согласно направлению изгиба, и за счет этого направление изгиба может быть определено посредством идентификации характеристики выходного значения.
[247] Датчик 71 изгиба может быть реализован в форме петлеобразной кривой, формирующей круг, четырехугольник или другие многоугольники, и может быть расположен вдоль края дисплея 160. Контроллер 120 может определять точку, в которой считывается изменение выходного значения петлеобразной кривой, в качестве области изгиба. Датчик изгиба может подключаться к дисплею 160 в форме незамкнутой кривой, такой как S-форма, Z-форма или зигзагообразная форма. Два датчика изгиба могут пересекаться.
[248] Хотя линейные датчики изгиба используются в вышеописанных различных вариантах осуществления, изгиб может считываться с использованием множества отдельных тензодатчиков.
[249] Фиг. 37 и 38 являются видами для того, чтобы иллюстрировать способ для считывания изгиба с использованием множества тензодатчиков согласно варианту осуществления настоящего раскрытия сущности. Тензодатчик использует металл или полупроводник, в котором сопротивление значительно изменяется согласно приложенной силе, и считывает деформацию поверхности объекта, который должен измеряться согласно изменению значения сопротивления. Обычная практика заключается в том, что материал, такой как металл, увеличивает значение сопротивления, когда его длина растягивается посредством внешней силы, и снижает значение сопротивления, когда длина сжимается. Соответственно, определяется то, выполняется ли изгиб, посредством считывания изменения значения сопротивления.
[250] Ссылаясь на фиг. 37, множество тензодатчиков размещается вдоль края дисплея 160. Число тензодатчиков может изменяться согласно размеру и форме дисплея 160 или предварительно определенному разрешению считывания изгиба.
[251] В состоянии, в котором тензодатчики размещаются так, как показано на фиг. 37, пользователь может изгибать определенную точку в произвольном направлении. Когда определенный угол изгибается так, как показано на фиг. 38, сила прикладывается к тензодатчику 80-x, перекрывающемуся с линией изгиба, из числа тензодатчиков 80-1-80-n, которые размещаются в горизонтальном направлении. Соответственно, выходное значение соответствующего тензодатчика 80-x увеличивается по сравнению с выходными значениями других тензодатчиков. Сила также прикладывается к тензодатчику 80-y, перекрывающемуся с линией изгиба, из числа тензодатчиков 80-n, 80-n+1-80-m, которые размещаются в вертикальном направлении, и в силу этого изменяется выходное значение. Контроллер 120 определяет то, что линия, соединяющая два тензодатчика 80-x и 80-y, в которых изменяются выходные значения, представляет собой линию изгиба.
[252] СПОСОБ ДЛЯ ИСПОЛЬЗОВАНИЯ ДАТЧИКОВ ДВИЖЕНИЯ И ДАТЧИКОВ ИЗГИБА И ИХ КАЛИБРОВКИ
[253] Как описано выше, гибкое устройство 100 отображения может определять форму изгиба с совместным использованием датчиков движения и датчиков изгиба.
[254] Фиг. 39 является видом, иллюстрирующим конфигурацию гибкого устройства отображения, которое включает в себя датчик движения и датчик изгиба, согласно варианту осуществления настоящего раскрытия сущности.
[255] Ссылаясь на фиг. 39, множество датчиков 80-1-80-m изгиба размещается вдоль краевой области гибкого устройства 100 отображения. Разнесение между датчиками изгиба может поддерживаться постоянным, и датчики изгиба могут размещаться более плотно в части, в которой часто выполняется изгиб, и могут размещаться с большим разнесением между собой в части, в которой редко выполняется изгиб.
[256] Датчики 110-1 и 110-2 движения могут располагаться вместе с датчиками изгиба. На фиг. 39, два датчика 110-1 и 110-2 движения располагаются на левом и правом краях гибкого устройства 100. Тем не менее, число и местоположение датчиков движения может изменяться различными способами.
[257] Контроллер 120 может определять форму изгиба с использованием датчиков изгиба и датчиков движения совместно. Например, когда линия изгиба определена посредством двух датчиков изгиба, как показано на фиг. 38, и движение считывается посредством датчика движения, который располагается на одной из двух областей, разделенных посредством линии изгиба, контроллер 120 может определять форму изгиба соответствующей части на основе направления движения.
[258] Контроллер 120 может определять линию изгиба или область изгиба с использованием датчика изгиба и может определять направление изгиба или степень изгиба с использованием датчика движения. Соответственно, контроллер 120 может определять форму изгиба посредством комбинирования результатов считывания посредством датчика изгиба и датчика движения.
[259] Контроллер 120 может определять форму изгиба на основе считываемых значений датчиков изгиба и определять форму изгиба с использованием датчиков движения и в завершение может определять то, что выполняется соответствующий изгиб, когда результаты определения являются согласованными друг с другом. Когда результаты определения не являются согласованными друг с другом, контроллер 120 может определять форму изгиба снова. Когда форма изгиба определяется с совместным использованием различных типов датчиков, как описано выше, может дополнительно повышаться точность.
[260] Когда используются датчики изгиба, характеристика ошибки датчиков изгиба может быть изменена вследствие длительного использования гибкого устройства или воздействия на окружающую среду (температуру, влажность или и т.д.). Например, когда датчики изгиба используются в течение длительного времени, датчики изгиба могут растягиваться, и в силу этого значение сопротивления во время изгиба может отличаться от значения сопротивления в начальном состоянии.
[261] Контроллер 120 может выполнять операцию калибровки, чтобы компенсировать характеристику ошибки датчиков изгиба. Когда считывается предварительно определенная калибровочная форма, контроллер 120 вычисляет значение компенсации на основе считываемых значений, выводимых из датчиков изгиба в то время, когда считывается калибровочная форма, и выполняет операцию калибровки, чтобы компенсировать считываемые значения датчиков изгиба с использованием вычисленного значения компенсации.
[262] Калибровочная форма означает форму изгиба, которая задается для того, чтобы выполнять операцию калибровки гибкого устройства 100. Например, калибровочная форма означает изгиб, который считывается, когда гибкое устройство 100 изгибается или прокатывается таким образом, что его противоположные концы приводятся в контакт друг с другом, и за счет этого изгиб считывается посредством всех датчиков изгиба, расположенных во всей области гибкого устройства 100.
[263] Контроллер 120 может определять то, считывается калибровочная форма или нет, с использованием датчиков движения и датчиков изгиба. Датчики движения могут использоваться нормально, даже когда возникает ошибка в выходных значениях датчиков изгиба, и за счет этого контроллер 120 может определять то, считывается калибровочная форма или нет, только на основе выходных значений датчиков движения.
[264] Информация относительно калибровочной формы сохранена в хранилище 130. Изготовитель гибкого устройства 100 может измерять выходные значения датчиков изгиба, когда калибровочная форма выполняется для гибкого устройства 100 до выпуска продукта, и может сохранять выходные значения в хранилище 130. Считываемые значения, выводимые из датчиков изгиба, когда принята калибровочная форма, определяются в качестве идеальных считываемых значений и сохраняются в хранилище 130.
[265] Фиг. 40 и 41 являются графиками для того, чтобы иллюстрировать операцию калибровки согласно варианту осуществления настоящего раскрытия сущности.
[266] Ссылаясь на фиг. 40, контроллер 120 сравнивает выходное значение (Sout), которое выводится из датчика изгиба, когда принимается калибровочная форма, и идеальное считываемое значение (Sideal), которое сохранено в хранилище 130. В этом случае, белый шум включен в реальное выходное значение (Sout), как показано на фиг. 40. Контроллер 120 удаляет белый шум посредством усреднения реальных выходных значений (Sout) на основе предварительно определенного времени.
[267] Фиг. 41 иллюстрирует промежуточное значение (Svias) реального выходного значения, из которого удаляется белый шум, согласно варианту осуществления настоящего раскрытия сущности.
[268] Ссылаясь на фиг. 41, контроллер 120 сравнивает промежуточное значение (Svias) и идеальное считываемое значение (Sideal) и определяет разность между ними в качестве значения компенсации и сохраняет определенное значение компенсации в хранилище 130. Соответственно, операция калибровки завершается.
[269] Контроллер 120 может компенсировать ошибку посредством вычитания значения компенсации из выходного значения, которое выводится из датчика изгиба, когда извлекается калибровочная форма. Хотя промежуточное значение считывается большим идеального считываемого значения на фиг. 41, промежуточное значение может считываться меньшим идеального считываемого значения согласно местоположению размещения датчика изгиба и характеристике калибровочной формы. В этом случае, контроллер 120 может компенсировать ошибку посредством суммирования значения компенсации с реальным выходным значением.
[270] В вышеописанном варианте осуществления, контроллер 120 автоматически выполняет операцию калибровки, когда считывается калибровочная форма. Тем не менее, операция калибровки может начинаться согласно отдельной команде. Например, контроллер 120 может выполнять операцию калибровки, когда кнопка, предоставленная на корпусе гибкого устройства 100, нажимается пользователем, или нажимается меню калибровки, отображенное на экране гибкого устройства 100. В этом случае, когда считывается выбор кнопки или меню калибровки, контроллер 120 может выводить сообщение с инструкциями, чтобы запрашивать то, принимать калибровочную форму через экран или динамик. Когда пользователь принимает калибровочную форму в течение предварительно определенного времени, контроллер 120 может выполнять операцию калибровки с использованием выходного значения, которое выводится из датчика изгиба в этом состоянии.
[271] На фиг. 40 и 41, значение компенсации вычисляется посредством сравнения выходных значений и значения идеального вывода, которое уже сохранено. Тем не менее, опорное значение может быть изменено через операцию калибровки. Например, когда начинается операция калибровки, контроллер 120 вычисляет промежуточное значение посредством усреднения выходных значений, выводимых из датчиков изгиба, когда калибровочная форма поддерживается. Контроллер 120 задает вычисленное промежуточное значение в качестве опорного значения и сохраняет значение в хранилище 130. Когда извлекается калибровочная форма, контроллер 120 определяет состояние изгиба посредством сравнения выходных значений, выводимых из датчиков изгиба после этого, и опорного значения, сохраненного в хранилище 130. Согласно настоящему варианту осуществления, пользователь часто выполняет операцию калибровки и обновляет опорное значение, так что может повышаться точность определения формы изгиба.
[272] Гибкое устройство 100 может быть реализовано посредством использования общего устройства без функции отображения или может быть реализовано посредством использования гибкого устройства отображения с функцией отображения, как описано выше. Гибкое устройство 100 может быть реализовано посредством использования портативного устройства, такого как мобильный телефон, планшетный PC, персональное цифровое устройство (PDA), переносной PC и электронная книга из числа гибких устройств отображения. В частности, когда гибкое устройство 100 реализовано посредством использования портативного устройства, такого как смартфон, который приобретает популярность в последнее время, гибкое устройство 100 может включать в себя различные элементы.
[273] Фиг. 42 является блок-схемой, иллюстрирующей пример гибкого устройства, которое включает в себя различные элементы согласно варианту осуществления настоящего раскрытия сущности.
[274] Ссылаясь на фиг. 42, гибкое устройство включает в себя множество датчиков 110-1-110-n движения, контроллер 120, хранилище 130, датчик 140 изгиба, датчик 150 касания, дисплей 160, приемное GPS-устройство 165, приемное DMB-устройство 166, графический процессор 170, источник 180 питания, аудиопроцессор 181, видеопроцессор 182, динамик 183, кнопку 184, USB-порт 185, камеру 186, микрофон 187 и модуль 190 связи.
[275] Выше подробно описаны конфигурации и операции датчиков 110-1-110-n движения, датчика 140 изгиба и дисплея 160.
[276] Датчик 150 касания может включать в себя датчик касания, который реализован посредством использования емкостного или резистивного типа датчика. Емкостный тип вычисляет координаты касания посредством считывания незначительного электричества, возбужденного в теле пользователя, когда часть тела пользователя касается поверхности дисплея 160, с использованием диэлектрического вещества, нанесенного на поверхность дисплея 160. Резистивный тип включает в себя две электродных пластины, и когда пользователь касается экрана, вычисляет координаты касания посредством считывания электрического тока, протекающего вследствие контакта между верхней и нижней пластинами в точке касания. Как описано выше, датчик касания может быть осуществлен в различных формах. Контроллер 120 может определять форму действия касания на основе считывающего сигнала, который считывается посредством датчика 150 касания. Действие касания может включать в себя простое касание, быстрое прикосновение, касание и удержание, перемещение, пролистывание, перетаскивание, стягивание и растягивание.
[277] Хотя не показано на фиг. 42, гибкое устройство может включать в себя датчик давления, бесконтактный датчик и датчик силы захвата в дополнение к датчику 140 изгиба и датчику 150 касания.
[278] Датчик давления считывает абсолютную величину давления, приложенного к гибкому устройству 100 отображения, когда пользователь выполняет действие касания или изгиба, и предоставляет абсолютную величину давления в контроллер 120. Датчик давления может включать в себя пьезопленку, которая встраивается в дисплей 160 и выводит электрический сигнал, соответствующий абсолютной величине давления. Когда датчик 150 касания реализован посредством использования резистивного датчика касания, резистивный датчик касания также может выполнять функцию датчика давления. Бесконтактный датчик считывает движение, которое приближается без непосредственного контакта с поверхностью отображения. Бесконтактный датчик может быть реализован посредством использования различных типов датчиков, таких как высокочастотный вибрационный бесконтактный датчик, который формирует высокочастотное магнитное поле и обнаруживает электрический ток, наводимый посредством магнитной характеристики, которая изменяется, когда приближается объект, магнитный бесконтактный датчик, который использует магнит, и емкостный бесконтактный датчик, который обнаруживает емкость, которая изменяется, когда приближается объект, и т.д. Датчик силы захвата располагается на кромке, обрамлении или дужке гибкого устройства отдельно от датчика давления и считывает захват пользователя. Датчик силы захвата может быть реализован посредством использования датчика давления или датчика касания.
[279] Контроллер 120 определяет форму изгиба пользователя посредством анализа различных считывающих сигналов, которые сформированы посредством различных типов датчиков, таких как датчик 110-1-110-n движения, датчик 140 изгиба, датчик 150 касания, датчик давления, бесконтактный датчик и датчик силы захвата, и выполняет операцию, соответствующую форме изгиба. Контроллер 120 может выполнять операцию управления согласно различным способам ввода, таким как действие касания, ввод движения, голосовой ввод и кнопочный ввод, помимо изгиба.
[280] Контроллер 120 может выполнять приложение, которое сохранено в хранилище 130, может конфигурировать экран выполнения приложения и может отображать экран выполнения. Контроллер 120 может воспроизводить различный контент, который сохранен в хранилище 130. Контроллер 120 может обмениваться данными с внешними устройствами через модуль 190 связи.
[281] Модуль 190 связи может обмениваться данными с различными типами внешних устройств согласно различным способам связи. Модуль 190 связи может включать в себя различные кристаллы связи, такие как Wi-Fi-кристалл 191, Bluetooth-кристалл 192, кристалл 193 по стандарту связи в поле в ближней зоне (NFC) и кристалл 194 беспроводной связи.
[282] Wi-Fi-кристалл 191, Bluetooth-кристалл 192 и NFC-кристалл 193 обмениваются данными с внешними устройствами согласно Wi-Fi-способу, Bluetooth-способу и NFC-способу, соответственно. NFC-кристалл 193 работает согласно NFC-способу, который использует 13,56 МГц из числа различных полос RFID-частот, таких как 135 кГц, 13,56 МГц, 433 МГц, 860-960 МГц и 2,45 ГГц. Когда используется Wi-Fi-кристалл 191 или Bluetooth-кристалл 192, обмениваются множеством элементов информации соединения, таких как SSID и сеансовый ключ, и соединение устанавливается с использованием информации соединения, и обмениваются множеством элементов информации. Кристалл 194 беспроводной связи осуществляет связь с внешними устройствами согласно различным стандартам связи, таким как IEEE, ZigBee, стандарт третьего поколения (3G), партнерский проект третьего поколения (3GPP) и стандарт долгосрочного развития (LTE).
[283] Приемное GPS-устройство 165 принимает GPS-сигнал из GPS-спутника и вычисляет текущую позицию гибкого устройства 100.
[284] Приемное DMB-устройство 166 принимает и обрабатывает DMB-сигнал.
[285] Графический процессор 170 формирует экран, включающий в себя различные объекты, такие как значок, изображение и текст, с использованием модуля вычисления (не показан) и модуля рендеринга (не показан). Модуль вычисления вычисляет значения атрибутов каждого объекта, который должен отображаться согласно виду экрана, к примеру, значениям координат, форме, размеру и цвету. Модуль рендеринга формирует экран с различными видами, включающими в себя объекты на основе значений атрибутов, вычисленных посредством модуля вычисления. Экран, сформированный посредством модуля рендеринга, отображается в области отображения дисплея 160.
[286] Источник 180 питания представляет собой элемент, который подает питание в каждый элемент гибкого устройства 100. Источник 180 питания может включать в себя анодный коллектор, анодный электрод, электролит, катодный электрод, катодный коллектор и оболочку, размещающую вышеуказанные элементы. Источник 180 питания может быть реализован посредством использования вторичного элемента, который может быть заряжаться или разряжать электричеством. Источник 180 питания может быть реализован в гибкой форме, так что источник 180 питания может быть изогнут вместе с гибким устройством 100. В этом случае, коллекторы, электроды, электролит и оболочка могут быть изготовлены из гибких материалов. Ниже подробнее поясняется подробная конфигурация и материалы источника 180 питания.
[287] Аудиопроцессор 181 представляет собой элемент, который обрабатывает аудиоданные. Аудиопроцессор 181 может выполнять различные операции обработки, такие как декодирование, усиление и фильтрацию шума относительно аудиоданных.
[288] Видеопроцессор 182 представляет собой элемент, который обрабатывает видеоданные. Видеопроцессор 182 может выполнять различные операции обработки изображений, такие как декодирование, масштабирование, фильтрация шума, преобразование частоты кадров и преобразование разрешения относительно видеоданных.
[289] Аудиопроцессор 181 и видеопроцессор 182 могут использоваться для того, чтобы обрабатывать мультимедийный контент или DMB-сигналы и воспроизводить их.
[290] Дисплей 160 отображает видеокадр, обработанный посредством видеопроцессора 182, и экран, сформированный посредством графического процессора 170.
[291] Динамик 183 выводит различные звуки оповещения или голосовые сообщения, а также различные аудиоданные, обработанные посредством аудиопроцессора 181.
[292] Кнопка 184 может быть реализована посредством использования различных видов кнопок, таких как механическая кнопка, сенсорная кнопка и колесико, которые формируются в определенной области гибкого устройства 100, такой как передняя поверхность, боковая поверхность и нижняя поверхность внешнего вида корпуса гибкого устройства 100.
[293] USB-порт 185 может обмениваться данными с различными внешними устройствами через USB-кабель.
[294] Камера 186 представляет собой элемент, который захватывает неподвижное изображение или движущееся изображение согласно управлению пользователем. Камера 186 может представлять собой множество камер, включающих в себя фронтальную камеру и тыловую камеру.
[295] Микрофон 187 принимает голос пользователя или другие звуки и преобразует звуки в аудиоданные. Контроллер 120 может использовать речевой ввод пользователя через микрофон 187 для обработки вызовов или может преобразовывать пользовательский голос в аудиоданные и сохранять аудиоданные в хранилище 130.
[296] Когда предоставляются камера 186 и микрофон 187, контроллер 120 может выполнять операции управления согласно пользовательскому голосу, который вводится через микрофон 187, или пользовательскому движению, которое распознано посредством камеры 186. Гибкое устройство 100 может управляться посредством деформации формы или касания и также может работать в режиме управления движением или режиме голосового управления. В режиме управления движением контроллер 120 активирует камеру 186 и захватывает пользователя, отслеживает изменение пользовательского движения и выполняет соответствующую операцию управления. В режиме голосового управления контроллер 120 может выполнять распознавание голоса посредством анализа пользовательского голоса, вводимого через микрофон 187, и выполнения операции управления согласно проанализированному пользовательскому голосу.
[297] Помимо этого, гибкое устройство 100 дополнительно может включать в себя различные внешние порты ввода, которые должны подключаться к различным внешним контактным выводам, таким как гарнитура, мышь и локальная вычислительная сеть (LAN).
[298] Вышеописанные операции контроллера 120 могут выполняться посредством программы, которая сохранена в хранилище 130. Хранилище 130 может сохранять программное обеспечение операционной системы (ОС), чтобы управлять гибким устройством 100, различные приложения, различные данные, которые вводятся или задаются, когда выполняется приложение, и различные данные, такие как контент, формы изгиба, характеристическая информация датчиков движения и ссылочная информация.
[299] Контроллер 120 управляет общей работой гибкого устройства 100 с использованием различных программ, сохраненных в хранилище 130.
[300] Контроллер 120 включает в себя оперативное запоминающее устройство 121 (RAM), постоянное запоминающее устройство 122 (ROM), таймер 123, основной центральный процессор 124 (CPU), первый - n-ый интерфейсы 125-1-125-n и шину 126.
[301] RAM 121, ROM 122, таймер 123, основной CPU 124 и первый - n-ый интерфейсы 125-1-125-n могут подключаться друг к другу через шину 126.
[302] Первый - n-ый интерфейсы 125-1-125-n подключаются к вышеописанным различным элементам. Один из этих интерфейсов может представлять собой сетевой интерфейс, который подключается к внешнему устройству через сеть.
[303] Основной CPU 124 осуществляет доступ к хранилищу 130 и выполняет начальную загрузку с использованием ОС, сохраненной в хранилище 130. Основной CPU 124 выполняет различные операции с использованием различных программ, контента и данных, сохраненных в хранилище 130.
[304] ROM 122 сохраняет набор команд для того, чтобы загружать систему. Когда вводится команда включения, и подается питание, основной CPU 124 копирует ОС, сохраненную в хранилище 130, в RAM 121 согласно команде, сохраненной в ROM 122, выполняет ОС и загружает систему. Когда завершена начальная загрузка, основной CPU 124 копирует различные приложения, сохраненные в хранилище 130, в RAM 121, выполняет приложения, скопированные в RAM 121, и выполняет различные операции.
[305] Когда принят считывающий сигнал датчика, основной CPU 124 сохраняет разнообразную информацию относительно операций в этот момент времени, такую как приложение или функция, которая выполнена ранее, или вид экрана, который отображается в этот момент времени, в хранилище 130. Основной CPU 124 также определяет то, какой тип изгиба выполняется, на основе считывающего сигнала.
[306] Как описано выше, множество датчиков 110-1-110-n движения выводят считываемые значения, соответствующие их состояниям, когда части, в которых размещаются эти датчики, наклоняются или вращаются посредством изгиба. В этом случае, знаки и размеры считываемых значений датчиков 110-1-110-n движения, которые располагаются в различных местоположениях, варьируются согласно форме изгиба. Соответственно, взаимосвязи между считываемыми значениями компонуются в качестве базы данных заранее и сохраняются в хранилище 130. Основной CPU 124 выполняет программу, чтобы определять тип изгиба. Основной CPU 124 может определять тип изгиба, соответствующий считываемым значениям, на основе базы данных, которая сохранена в хранилище 130, когда выполняется программа.
[307] Основной CPU 124 может управлять таймером 123, чтобы подсчитывать время. Соответственно, когда считывающий сигнал не изменяется в течение предварительно определенного времени, основной CPU 124 определяет то, что выполняется изгиб и удержание. Когда считывающие сигналы не поддерживаются и непрерывно изменяются и возвращаются к исходным значениям, основной CPU 124 определяет то, что выполняется изгиб и перевод в плоское состояние, в котором гибкое устройство разгибается после изгиба. Как описано выше, основной CPU 124 может различать изгиб и перевод в плоское состояние и изгиб и удержание с использованием таймера 123.
[308] Когда определение завершается, основной CPU 124 идентифицирует информацию относительно функции, сопоставленной с определенной формой изгиба, из хранилища 130, загружает приложение для выполнения функции в RAM 121 и выполняет приложение.
[309] На фиг. 42, гибкое устройство проиллюстрировано в качестве устройства, которое оснащено различными функциями, такими как функция обмена данными, функция приема широковещательной передачи, функция воспроизведения видео и функция отображения, например, и схематично проиллюстрированы различные элементы гибкого устройства 100 отображения. Соответственно, некоторые элементы, проиллюстрированные на фиг. 42, могут опускаться или модифицироваться, либо может добавляться другой элемент.
[310] Как описано выше, контроллер 120 может выполнять различные операции посредством выполнения программы, сохраненной в хранилище 130.
[311] Фиг. 43 является видом для того, чтобы пояснять программное обеспечение, сохраненное в хранилище, согласно варианту осуществления настоящего раскрытия сущности.
[312] Ссылаясь на фиг. 43, программное обеспечение, включающее в себя базовый модуль 131, модуль 132 считывания, модуль 133 связи, модуль 134 представления, модуль 135 управления веб-обозревателем и модуль 136 управления услугами, может быть сохранено в хранилище 130.
[313] Базовый модуль 131 обрабатывает сигналы, передаваемые из аппаратных средств, включенных в гибкое устройство 100, и передает сигналы в модуль верхнего уровня.
[314] Базовый модуль 131 включает в себя модуль 131-1 хранения данных, модуль 131-2 управления услугами на основе информации местоположения, модуль 131-3 обеспечения безопасности и сетевой модуль 131-4.
[315] Модуль 131-1 хранения данных представляет собой программный модуль, который управляет базой данных (DB) или системным реестром. Основной CPU 134 может осуществлять доступ к базе данных в хранилище 130 с использованием модуля 131-1 хранения данных и может считывать различные данные. Модуль 131-2 управления услугами на основе информации местоположения представляет собой программный модуль, который взаимно соединяется и/или взаимодействует с различными аппаратными средствами, такими как GPS-кристалл, и поддерживает услугу на основе информации местоположения. Модуль 131-3 обеспечения безопасности представляет собой программный модуль, который поддерживает сертификацию для аппаратных средств, разрешение запроса и защищенную область хранения. Сетевой модуль 131-4 представляет собой модуль для того, чтобы поддерживать сетевое соединение, и включает в себя модуль Distributed.net (DNET) и модуль универсального автоматического конфигурирования подключаемых устройств (UPnP).
[316] Модуль 132 считывания представляет собой модуль, который собирает информацию из различных датчиков и анализирует и управляет собранной информацией. Модуль 132 считывания обнаруживает атрибуты действия, такие как значения координат точки, в которой выполняется касание, направление перемещения, скорость перемещения и расстояние перемещения касания. Основной CPU 124 запускает модуль 132 считывания и вычисляет угол наклона в продольном направлении, угол наклона в поперечном направлении и угол относительно вертикальной оси с использованием считываемых значений, которые считываются посредством множества датчиков движения. В этом случае, могут использоваться вышеописанные уравнения. Основной CPU 124 может определять форму изгиба посредством сравнения характерных взаимосвязей угла наклона в продольном направлении, угла наклона в поперечном направлении и угла относительно вертикальной оси и предварительно сохраненной базы данных. Когда база данных сформирована на основе считываемых значений, основной CPU 124 может не вычислять угол наклона в продольном направлении, угол наклона в поперечном направлении и угол относительно вертикальной оси и может определять форму изгиба посредством обнаружения информации формы изгиба, соответствующей считываемым значениям, считываемым посредством датчиков движения из базы данных. Помимо этого, согласно обстоятельствам, модуль 132 считывания может включать в себя модуль распознавания лиц, модуль распознавания голоса, модуль распознавания движения и модуль распознавания NFC.
[317] Модуль 133 связи представляет собой модуль для того, чтобы обмениваться данными с внешним устройством. Модуль 133 связи включает в себя модуль 133- обмена сообщениями, такой как программа обмена сообщениями, программа службы коротких сообщений (SMS) и службы мультимедийных сообщений (MMS) и почтовая программа, и модуль 133-2 телефонной связи, который включает в себя программный модуль агрегатора информации вызовов и модуль управления связью по протоколу "речь-по-IP" (VoIP).
[318] Модуль 134 представления представляет собой модуль, который формирует экран отображения. Модуль 134 представления включает в себя мультимедийный модуль 134 для того, чтобы воспроизводить мультимедийный контент и выводить мультимедийный контент, и модуль 134 рендеринга пользовательского интерфейса (UI) для того, чтобы обрабатывать UI и графику. Мультимедийный модуль 134-1 может включать в себя модуль проигрывателя, модуль записывающей видеокамеры и звуковой процессор. Соответственно, мультимедийный модуль 134-1 формирует экран и звук посредством воспроизведения различного мультимедийного контента. Модуль 134-2 UI-рендеринга может включать в себя модуль комбинирования изображений для того, чтобы комбинировать изображения, модуль комбинирования координат для того, чтобы комбинировать координаты на экране, чтобы отображать изображение и формировать координаты, X11-модуль для того, чтобы принимать различные события из аппаратных средств, и инструментарий управления двумерным/трехмерным UI для того, чтобы предоставлять инструментальное средство для конфигурирования UI двумерного или трехмерного формата.
[319] Модуль 135 управления веб-обозревателем представляет собой модуль, который выполняет просмотр веб-страниц и осуществляет доступ к веб-серверу. Модуль 135 управления веб-обозревателем может включать в себя модуль веб-просмотра для того, чтобы подготавливать посредством рендеринга и просматривать веб-страницу, модуль управления агентом загрузки для того, чтобы выполнять загрузки, модуль работы с закладками и модуль Webkit.
[320] Модуль 136 управления услугами представляет собой модуль, который включает в себя различные приложения, чтобы предоставлять услуги, сопоставленные с формой изгиба, когда определяется форма изгиба. Модуль 136 управления услугами может включать в себя различные программные модули, такие как навигационная программа, программа воспроизведения контента, игровая программа, программа для чтения электронных книг, программа для работы с календарем, программа управления уведомлениями и другие виджеты. Каждый программный модуль может сопоставляться с различными состояниями деформации формы, такими как изгиб и перевод в плоское состояние или изгиб и удержание.
[321] Хотя различные программные модули проиллюстрированы на фиг. 43, некоторые программные модули могут опускаться, модифицироваться или добавляться согласно типу и характеристике гибкого устройства 100. Например, если гибкое устройство 100 реализовано посредством использования пульта дистанционного управления, который исключает функцию отображения и управляет внешним устройством только с помощью гибкости, модуль 134 представления, модуль 135 управления веб-обозревателем или модуль 136 управления услугами могут исключаться. В этом случае, только модуль для того, чтобы обнаруживать характеристику формы изгиба, и системный реестр для того, чтобы указывать информацию относительно управляющего сигнала, сопоставленного с формой изгиба, могут быть сохранены в хранилище 130.
[322] С другой стороны, когда предоставляется множество датчиков движения, большая величина мощности может потребляться в каждом датчике движения. Соответственно, контроллер 120 может активировать множество датчиков движения только при необходимости.
[323] Фиг. 44 и 45 являются видами для того, чтобы иллюстрировать способ для активации датчика движения согласно касанию пользователя согласно варианту осуществления настоящего раскрытия сущности.
[324] Ссылаясь на фиг. 44, гибкое устройство 100 включает в себя обрамление 3100, которое формируется вдоль края дисплея 160.
[325] Обрамление 3100 также может быть изготовлено из гибкого материала, так что оно может быть изогнуто вместе с дисплеем 160. Кнопки 3110 и 3120 предоставляются на обрамлении 3100. Когда считывается касание пользователя по меньшей мере одной из кнопок 3110 и 3120, контроллер 120 может активировать датчики движения. В этом случае, другие датчики, такие как датчики изгиба и датчики касания, могут активироваться вместе с датчиками движения. Активация, изложенная в данном документе, означает операцию подачи питания в датчики движения. Контроллер 120 может активировать датчики в течение предварительно определенного времени с момента, когда выполняется касание пользователя. Когда изгиб считывается из каждого из датчиков, включающих в себя датчики движения, контроллер 120 продлевает время активации датчиков.
[326] Пользователь может изгибать гибкое устройство 100 при выборе вышеописанных кнопок 3110 и 3120. Когда касаются кнопок 3110 и 3120, и выполняется изгиб, контроллер 120 может распознавать то, что пользователь держит и изгибает гибкое устройство 100 обеими руками. Когда касаются только одной кнопки, и выполняется изгиб, контроллер 120 может распознавать то, что пользователь держит и изгибает гибкое устройство 100 одной рукой. Контроллер 120 может игнорировать действие изгиба, которое считывается, когда не касаются ни одной из кнопок 3110 и 3120.
[327] Хотя две кнопки 3110 и 3120 проиллюстрированы на фиг. 44, число кнопок может быть изменено согласно варианту осуществления, и местоположения кнопок также могут быть изменены в различные специальные местоположения. Кнопки 3110 и 3120 также могут быть реализованы посредством использования сенсорной кнопки или других типов кнопок помимо механической кнопки.
[328] Хотя фиг. 44 иллюстрирует кнопки 3110 и 3120, предоставленные на обрамлении 3100, кнопка может быть реализована в форме куполообразной клавиши или может быть реализована посредством использования части панели сенсорного экрана или части сенсорной панели. Кроме того, когда захват пользователя в конкретном местоположении считывается с использованием датчика силы захвата или бесконтактного датчика, который располагается в конкретном местоположении гибкого устройства 100, контроллер 120 может определять то, что выбирается кнопка.
[329] Хотя фиг. 44 иллюстрирует обрамление 3100, обрамление 3100 может опускаться согласно типу гибкого устройства 100. В этом случае, кнопка может предоставляться на боку гибкого устройства 100 отображения.
[330] Виртуальная кнопка может отображаться на экране дисплея 160. Фиг. 45 является видом, иллюстрирующим гибкое устройство 100, которое не включает в себя обрамление 3100.
[331] Ссылаясь на фиг. 45, вся передняя поверхность гибкого устройства 100 может служить в качестве дисплея 160. В этом случае, поскольку отсутствует обрамление 3100, отсутствует пространство для кнопок 3110 и 3120. Соответственно, в этом случае, меню 3130 и 3140 с кнопками могут отображаться в определенных областях на экране 4500. Когда выбирается по меньшей мере одно из меню 3130 и 3140 с кнопками, контроллер 120 может активировать каждый из датчиков, включающих в себя датчики движения.
[332] Меню 3130 и 3140 с кнопками, показанные на фиг. 45, могут отображаться в различных формах, таких как форма круга, четырехугольника и звезды. Помимо этого, яркость кнопок может повышаться, различные текстуры поверхности могут предоставляться для кнопок, либо локальная вибрация может формироваться, без пометки местоположения кнопки, так что пользователь может распознавать местоположение.
[333] Согласно другому варианту осуществления, меню 3130 и 3140 с кнопками могут не отображаться, и датчики могут активироваться в только пределах предварительно определенного времени с момента, когда касаются определенной области экрана 4500, либо только в то время, когда касаются определенной области экрана 4500.
[334] Как описано выше, гибкое устройство 100 может включать в себя различные аппаратные элементы и программные элементы и за счет этого может предоставлять различные услуги. Услуги могут сопоставляться с формами изгиба и могут управляться пользователем. Операция, соответствующая форме изгиба, может варьироваться согласно приложению, которое выполняется в гибком устройстве, когда выполняется изгиб.
[335] Ниже описываются примеры различных операций управления, которые выполняются согласно формам изгиба.
[336] ПРИМЕРЫ ОПЕРАЦИЙ УПРАВЛЕНИЯ СОГЛАСНО ФОРМАМ ИЗГИБА
[337] Фиг. 46 иллюстрирует пример операции управления, которая выполняется, когда один край изгибается согласно варианту осуществления настоящего раскрытия сущности.
[338] Ссылаясь на фиг. 46, действие изгиба пользователем выполняется, когда гибкое устройство 100 выполняет приложение цифровой широковещательной передачи мультимедиа (DMB). В этом случае, экран широковещательной передачи может отображаться только в плоской области (F), отличной от области (B) изгиба.
[339] В состоянии, в котором отображается экран 4600 широковещательной передачи, принимаемый через широковещательный канал 11, как показано на фиг. 46, когда выполняется действие изгиба пользователем, включающее в себя изгиб одного края в направлении по оси Z+, а затем его разгибание, как показано на фиг. 46, гибкое устройство 100 может выполнять операцию переключения каналов на экран 4610 широковещательной передачи. Широковещательный канал 11 переключается на предыдущий широковещательный канал, такой как широковещательный канал 9. Когда изгиб выполняется в направлении Z- аналогичным образом, или изгибается левый край, широковещательный канал 11 переключается на следующий широковещательный канал, такой как широковещательный канал 13.
[340] На фиг. 46, когда увеличивается угол изгиба, может повышаться скорость переключения каналов, либо может увеличиваться диапазон переключения каналов. Иными словами, переключение каналов, которое выполнено на один канал, выполняется на 5 или 10 каналов. На фиг. 46, операция переключения каналов выполняется посредством действия изгиба пользователем. Тем не менее, это представляет собой просто пример. Различные другие операции могут сопоставляться с формой изгиба и могут выполняться.
[341] Фиг. 47 иллюстрирует пример операции, когда одновременно выполняются изгиб и касание, согласно варианту осуществления настоящего раскрытия сущности. На фиг. 47, гибкий дисплей 100 выполняет приложение для чтения электронных книг.
[342] Ссылаясь на фиг. 47, когда пользователь держит правый край дисплея 160 и изгибает дисплей 160 в направлении по оси Z+, следующая страница (страница 4) относительно текущей страницы (страницы 3) отображается на дисплее 160.
[343] Когда пользователь продолжает изгибать правый край в направлении по оси Z+, следующая страница (страница 5) отображается на дисплее 160.
[344] Когда пользователь касается экрана дисплея 160 в этом процессе, задается закладка для соответствующей страницы.
[345] Когда пользователь завершает изгиб, когда отображается страница 5, и все область дисплея 160 становится плоской, страница 5 непрерывно отображается на дисплее 160.
[346] Фиг. 48 является видом для того, чтобы пояснять операцию верчения согласно варианту осуществления настоящего раскрытия сущности.
[347] Ссылаясь на фиг. 48, когда пользователь держит гибкое устройство 100 обеими руками и многократно перемещает гибкое устройство 100 вверх и вниз, попеременно выполняются изгиб в направлении по оси Z+ и изгиб в направлении Z-. Способ для определения операции верчения описан выше, и в силу этого лишнее пояснение опускается.
[348] Когда выполняется операция верчения, гибкое устройство 100 выполняет операцию, соответствующую операции верчения. Например, когда операция верчения выполняется в то время, когда различные объекты, такие как значок, изображение, текст и фотография и т.д. отображаются на дисплее 160, гибкое устройство 100 может удалять объекты по одному.
[349] Фиг. 49 является видом для того, чтобы пояснять пример операции, которая выполняется, когда пользователь держит гибкое устройство 100 и руками и изгибает его согласно варианту осуществления настоящего раскрытия сущности.
[350] Ссылаясь на фиг. 49, когда изгиб выполняется в направлении Z- в то время, когда множество объектов OB1-OB6 отображаются на экране 4900 дисплея 160, объекты OB1-OB6, отображенные на экране, перемещаются к линии изгиба. Помимо этого, объекты OB7-OB9, которые не отображаются в плоском состоянии, заново отображаются и перемещаются к линии изгиба.
[351] Если изгиб выполняется в направлении по оси Z+, объекты перемещаются к противоположным краям по отношению к линии изгиба. Соответственно, объекты, которые перемещаются на противоположные края, исчезают с экрана.
[352] На фиг. 49, когда изгиб в направлении Z- и изгибе в направлении по оси Z+ попеременно повторяется на высокой скорости, гибкое устройство 100 определяет то, что выполняется операция верчения. Соответственно, объекты, отображенные на экране, исчезают по одному, как будто их стряхивают с экрана.
[353] Фиг. 50 является видом для того, чтобы пояснять операцию встряхивания согласно варианту осуществления настоящего раскрытия сущности.
[354] Ссылаясь на фиг. 50, когда пользователь держит один край гибкого устройства 100 и встряхивает гибкое устройство 100, гибкое устройство 100 попеременно изгибается в направлении по оси Z+ и направлении Z-. Одна часть, которая держится пользователем, поддерживается в плоском состоянии (F), а другая часть изгибается по отношению к граничной линии (L), так что формируется область (B) изгиба. Как показано на фиг. 50, направление, в котором держит гибкое устройство 100 пользователь, задается как направление X+, а противоположное направление задается как направление X-.
[355] Когда операция встряхивания выполняется в то время, когда множество объектов OB1, OB2 и OB3 отображается на экране дисплея 160, как показано на фиг. 50, объекты перемещаются в направлении X- и отображаются. Когда объекты OB1, OB2 и OB3 перемещаются к краю направления X-, объекты удаляются.
[356] Фиг. 51 является видом, иллюстрирующим операцию гибкого устройства, которая выполняется, когда изгиб и удержание выполняется для угла, согласно варианту осуществления настоящего раскрытия сущности.
[357] Ссылаясь на фиг. 51, в состоянии, в котором выполняется первое приложение APP1, и отображается экран 5100 выполнения, когда угол изогнут, и поддерживается изогнутое состояние, новая область 5110 открывается на краю, включающем в себя угол. Край разделен в отношении конечной точки граничной линии, и новая область 5110 открывается на краю.
[358] Гибкое устройство 100 отображает экран выполнения другого приложения APP2, который отличается от исходного экрана 5100, в новой области 5110.
[359] Когда касание выполняется в двух областях, в которых выполняются множество различных приложений, как описано выше, фоновый экран или другие базовые пользовательские интерфейсы могут отображаться вместо экранов выполнения приложения, отображенных в двух областях. Например, когда двух областей касаются одновременно, либо когда выполняется жест касания двух областей одновременно и разведения пальцев в горизонтальном направлении, две области 5100 и 5110 разделяются друг от друга горизонтально, и экран преобразуется в фоновый экран или базовый UI.
[360] Кроме того, когда мультикасание выполняется в двух областях 5100 и 5110, и пролистывание выполняется таким образом, что точки касания перемещаются в направлении к границе, экраны выполнения приложений APP1 и APP2 меняются между собой. В этом состоянии, если состояние удержания прекращается, восстанавливается исходный экран 5100.
[361] На фиг. 51, две области 5100 и 5110 четко разделены по отношению к одной граничной линии. Тем не менее, когда общий изгиб, который имеет радиус кривизны, больший предварительно определенного значения, выполняется вместо изгиба, имеющего небольшой радиус кривизны, такого как складывание, граничная линия между экранами может формироваться мягко. Экраны выполнения приложения могут перекрываться друг с другом в изогнутой области, и может применяться эффект прозрачной градации, так что две области могут естественно отображаться, либо применяется мозаичный эффект, так что две области могут представляться как перекрывающиеся друг с другом.
[362] Фиг. 52 является видом, иллюстрирующим другой пример операции, которая выполняется, когда изгиб и удержание выполняется для угла, согласно варианту осуществления настоящего раскрытия сущности.
[363] Ссылаясь на фиг. 52, окно уведомления, отображающее разнообразную информацию состояния относительно текущего выполняемого приложения, может отображаться в углу. Когда гибкое устройство 100 выполняет программу обмена сообщениями, экран выполнения программы обмена сообщениями отображается на экране 5200, как показано на фиг. 52. В этом состоянии, окно 5210 уведомления может отображать информацию, указывающую текущее состояние пользователя или собеседника пользователя.
[364] Пользователь может изменять состояние посредством касания окна 5210 уведомления. Ссылаясь на фиг. 52, когда касаются окна 5210 уведомления, текущее состояние пользователя изменяется на состояние "Не беспокоить". Информация относительно этого состояния отображается на окне 5210 уведомления. Пользователь может деактивировать состояние "Не беспокоить" посредством отображения снова окна 5210 уведомления. Окно 5210 уведомления также может отображать информацию по друзьям, которые зарегистрированы в системе.
[365] Когда окно 5210 уведомления более не требуется, пользователь может разворачивать угол и может инструктировать убирание окна 5210 уведомления. На фиг. 52, изгиб и удержание выполняется в углу в диагональном направлении, и сообщение, отображенное в окне уведомления, совмещается параллельно с линией изгиба. Тем не менее, это не должно считаться ограничением. Угол направления совмещения сообщения может вращаться в направлении по часовой стрелке, так что сообщение может совмещаться параллельно с верхним краем экрана 5200, а не с линией изгиба.
[366] Фиг. 53 является видом, иллюстрирующим другой пример функции, которая выполняется, когда выполняется изгиб, согласно варианту осуществления настоящего раскрытия сущности.
[367] Ссылаясь на фиг. 53, когда определенная область изгибается назад в то время, когда отображается определенный экран 5300, экран разделяется на два экрана по отношению к граничной линии. Исходный экран 5300 отображается в первой области 5300(a) разделенных экранов. В этом случае, вид и размер исходного экрана 5300 могут регулироваться согласно первой области 5300(a). Другой экран, вторая область 5300(b), закрыт.
[368] На фиг. 53, гибкое устройство 100 изгибается в вертикальном направлении. Тем не менее, идентичная операция может выполняться, когда гибкое устройство 100 изгибается в горизонтальном направлении или в диагональном направлении. Например, на фиг. 53, когда гибкое устройство 100 изгибается в диагональном направлении, и состояние удерживается, экран разделяется на два треугольных экрана. Один из экранов может отображать миниатюры или список, а другой экран может укрупнять объект, который выбран из миниатюр или списка, и отображать объект.
[369] Когда гибкое устройство 100 складывается в противоположном направлении относительно фиг. 53, и противоположные края приводятся в соприкосновение друг с другом по отношению к центру экрана, контроллер 120 может выключать гибкое устройство 100, деактивировать только дисплей 160 или может преобразовывать состояние в состояние ожидания. В этом состоянии, когда две области, контактирующие друг с другом, отделяются друг от друга более чем на предварительно определенное разнесение, гибкое устройство 100 может автоматически включаться, или включается дисплей 160. Яркость экрана может регулироваться согласно углу или времени раскладывания.
[370] Как описано выше, изгиб может выполняться в различных формах в различных местоположениях, и, соответственно, могут выполняться различные приложения или функции, либо может изменяться вид экрана.
[371] В вышеописанных вариантах осуществления, размер в ширину дисплея 160 превышает размер в высоту. Тем не менее, это представляет собой просто пример. Размер, форма и соотношение сторон дисплея 160 могут варьироваться согласно типу гибкого устройства.
[372] Фиг. 54 является видом для того, чтобы иллюстрировать способ для выполнения операции навигации по меню согласно форме изгиба в гибком устройстве, которое включает в себя дисплей 160, имеющий размер в высоту, превышающий размер в ширину, согласно варианту осуществления настоящего раскрытия сущности.
[373] Ссылаясь на фиг. 54, гибкое устройство 100 может отображать экран 5400 меню, который включает в себя множество меню. Экран 5400 меню может отображаться, когда выбирается конкретное меню, или возникает конкретная форма изгиба.
[374] Когда изгиб выполняется в то время, когда отображается экран 5400 меню, контроллер 120 может выполнять операцию навигации по меню для множества меню 5410-5450 согласно форме изгиба. Операция навигации по меню включает в себя различные операции идентификации и выбора меню, такие как операция перемещения меню, операция выбора меню, операция изменения страницы меню, операция прокрутки меню и операция отображения главного меню и подменю.
[375] Операция перемещения меню означает операцию перемещения курсора или других маркеров выделения между меню. Операция выбора меню означает операцию выбора одного меню. Операция изменения страницы меню означает операцию изменения текущей страницы меню на предыдущую страницу меню или следующую страницу меню, когда меню размещаются на основе страниц. Операция прокрутки меню означает операцию прокрутки меню, которые не отображаются на экране на одной странице меню, чтобы обеспечивать их появление на экране или исчезновение с экрана. Операция отображения главного меню и подменю означает операцию отображения подменю, принадлежащих одному меню, когда выбрано меню, или отображения главного меню, которому принадлежат меню.
[376] Ссылаясь на фиг. 54, когда правый верхний угол изгибается однократно, в то время как первое меню 5410 выделено на экране 5400 меню, операция перемещения меню выполняется для того, чтобы перемещать выделение в следующее меню 5420. Когда правый верхний угол изгибается еще раз, выделение перемещается в следующее меню 5430. В этом состоянии, когда левый край изгибается, выбирается выделенное меню 5430, и отображается экран 5500 подменю, принадлежащий меню 5430. Подменю 5431-5434, принадлежащие главному меню 5430, отображаются на экране 5500 подменю. Одно из подменю 5431-5434 выделяется на экране 5500 подменю. Соответственно, когда верхний угол изгибается снова, в то время как отображается экран 5500 подменю, перемещается выделение. Когда левый край изгибается, в то время как выделение отображается на одном из подменю, выбирается соответствующее подменю, и отображается UI-экран, соответствующий выбранному подменю.
[377] Хотя не показано на фиг. 54, когда множество меню отображаются на экране таким образом, что все меню не могут отображаться на одном экране меню, операция прокрутки меню может выполняться посредством изгиба верхнего края или нижнего края.
[378] В вышеприведенном примере, меню отображаются в форме списка. Тем не менее, когда меню отображаются в форме значков, операция навигации по меню может выполняться согласно форме изгиба. Хотя правый верхний угол или левый край изгибаются на фиг. 54, характеристики форм изгиба и соответствующие операции навигации по меню могут сопоставляться друг с другом различными способами.
[379] Различные базовые операции, отличные от операции навигации по меню, такие как увеличение масштаба, уменьшение масштаба, переключение каналов и регулировка громкости, могут выполняться и управляться согласно форме изгиба.
[380] В вышеописанных вариантах осуществления, гибкое устройство 100 имеет плоский тип. Тем не менее, гибкое устройство 100 не обязательно имеет плоский тип и может быть реализовано посредством использования различных типов. В дальнейшем в этом документе поясняются различные примеры внешнего вида.
[381] Фиг. 55 является видом, иллюстрирующим пример подробной формы внешнего вида гибкого устройства согласно варианту осуществления настоящего раскрытия сущности.
[382] Ссылаясь на фиг. 55, гибкое устройство 100 включает в себя корпус 5700, дисплей 160 и захватную часть 5710.
[383] Корпус 5700 служит в качестве типа кожуха, содержащего дисплей 160. Когда гибкое устройство 100 включает в себя различные элементы, как показано на фиг. 42, элементы, за исключением дисплея 160 и некоторых датчиков, могут монтироваться в корпусе 5700.
[384] Корпус 5700 включает в себя вращательный ролик (не показан), чтобы прокатывать дисплей 160. Соответственно, дисплей 160 прокатывается вокруг вращательного ролика и вкладывается в корпус 5700, когда гибкое устройство 100 не используется. Когда пользователь захватывает захватную часть 5710 и вытаскивает дисплей 160, вращательный ролик вращается в направлении, противоположном направлению прокатки, так что прекращается прокатывание, и дисплей 160 выходит из корпуса 5700. Ограничитель может предоставляться на вращательном ролике. Соответственно, когда пользователь вытаскивает захватную часть 5710 более чем на предварительно определенное расстояние, вращение вращательного ролика прекращается посредством ограничителя, и за счет этого дисплей 160 фиксируется.
[385] Пользователь может выполнять различные функции с использованием дисплея 160, который является доступным снаружи. Когда пользователь нажимает кнопку, чтобы разблокировать ограничитель, ограничитель разблокируется, и вращательный ролик вращается в обратном направлении, так что дисплей 160 вкатывается в корпус 5700. Ограничитель может формироваться в форме переключателя, чтобы прекращать работу зубчатой передачи для того, чтобы вращать вращательный ролик. Элементы, которые используются в стандартной прокатной конструкции, могут использоваться в качестве вращательного ролика и ограничителя, и в силу этого опускается их подробная иллюстрация и описание.
[386] Корпус 5700 включает в себя источник 180 питания. Источник 180 питания может быть осуществлен в различных формах, таких как узел соединения с аккумулятором, в котором монтируется неперезаряжаемый аккумулятор, вторичный элемент, который допускает повторное использование определенное число раз посредством заряда пользователем, или солнечный элемент, который формирует электричество с использованием солнечного тепла. Когда источник 180 питания реализуется посредством использования вторичного элемента, пользователь может подключать корпус 5700 к внешнему источнику питания через провод и может заряжать источник 180 питания.
[387] На фиг. 55, корпус 5700 имеет цилиндрическую форму. Тем не менее, корпус 5700 может иметь прямоугольную форму или другие многоугольные формы. Дисплей 160 также может быть осуществлен в других формах, таких как помещение в корпус 5700, вместо обеспечения доступности снаружи корпуса 5700 посредством вытаскивания.
[388] Фиг. 56 является видом, иллюстрирующим гибкое устройство отображения, в котором источник питания присоединяется или отсоединяется согласно варианту осуществления настоящего раскрытия сущности.
[389] Ссылаясь на фиг. 56, источник 180 питания предоставляется на одном краю гибкого устройства таким образом, чтобы он присоединяется или отсоединяется от гибкого устройства.
[390] Источник 180 питания изготовлен из гибкого материала и за счет этого является изгибаемым вместе с дисплеем 160. Источник 180 питания может включать в себя катодный коллектор, катодный электрод, электролит, анодный электрод, анодный коллектор и оболочку, размещающую вышеуказанные элементы.
[391] Например, коллектор может быть реализован посредством использования сплава, такого как TiNi, имеющий хорошую упругость, металла, такого как медь и алюминий, проводящего материала, такого как металл, покрытый углеродом, углерод и углеродное волокно, или проводящего полимера, такого как полипиррол.
[392] Катодный электрод может быть изготовлен посредством отрицательного электродного материала, к примеру, металла, такого как литий, натрий, цинк, магний, кадмий, сплав хранения водорода и свинец, неметалла, такого как углерод, и высокомолекулярного электродного материала, такого как сероорганическое соединение.
[393] Анодный электрод может быть изготовлен посредством положительного электродного материала, такого как сульфид серы и металла, оксид лития и переходный металл, такой как LiCoO2, и высокомолекулярного электродного материала, такого как SOCl2, MnO2, Ag2O, Cl2, NiCl2 и NiOOH. Блок электролита может быть реализован в форме геля с использованием PEO, PVdF, PMMA и PVAC.
[394] Оболочка может использовать общую полимерную смолу. Например, может использоваться PVC, HDPE или эпоксидная смола. В дополнение (или вместо) них, для оболочки может использоваться любой материал, который позволяет не допускать повреждения резьбового элемента и является свободно гнущимся или изгибаемым.
[395] Каждый из анодного электрода и катодного электрода в источнике 180 питания может включать в себя разъем, который должен электрически подключаться к внешнему источнику.
[396] Ссылаясь на фиг. 56, разъем выступает из источника 180 питания, и паз, соответствующий местоположению, размеру и форме разъема, формируется на дисплее 160. Соответственно, источник 180 питания соединяется с дисплеем 160, когда разъем и паз соединяются между собой. Разъем источника 180 питания подключается к панели подключения к сети питания гибкого устройства 100 отображения, чтобы подавать питание в устройство 100 отображения.
[397] Хотя источник 180 питания присоединяется или отсоединяется от одного края гибкого устройства 100 на фиг. 56, это представляет собой просто пример. Местоположение и форма источника 180 питания могут изменяться согласно характеристике продукта. Например, когда гибкое устройство 100 имеет предварительно определенную толщину, источник 180 питания может монтироваться на задней поверхности гибкого устройства 100.
[398] Фиг. 57 является видом, иллюстрирующим гибкое устройство с трехмерной конструкцией, а не с плоскопанельной конструкцией согласно варианту осуществления настоящего раскрытия сущности.
[399] Ссылаясь на фиг. 57, дисплей 160 располагается на одной стороне гибкого устройства 100 отображения, и различные аппаратные средства, такие как, кнопка, динамик, микрофон и IR-индикатор предоставляются на другой стороне.
[400] Весь внешний кожух или часть внешнего кожуха гибкого устройства 100, показанного на фиг. 57, изготавливается из резины или других полимерных смол и является гибко изгибаемым. Соответственно, все гибкое устройство 100 или часть гибкого устройства 100 может иметь гибкость.
[401] Гибкое устройство 100 может выполнять новую операцию, которая отличается от предыдущей операции, когда выполняется изгиб. Например, гибкое устройство 100, которое нормально выполняет функцию пульта дистанционного управления, чтобы управлять внешним устройством, может выполнять функцию вызова, когда одна область изгибается. Когда выполняется функция пульта дистанционного управления, кнопка пульта дистанционного управления может отображаться на дисплее 160, а когда выполняется функция вызова, наборная панель может отображаться на дисплее 160.
[402] Фиг. 58 иллюстрирует круговое гибкое устройство типа согласно варианту осуществления настоящего раскрытия сущности.
[403] Ссылаясь на фиг. 58, визуально или функционально различная операция может выполняться согласно форме, в которой размещается или складывается гибкое устройство 100. Например, когда гибкое устройство размещено на нижней части горизонтально, отображаются фотографии или другой контент, а когда гибкое устройстве отображения стоит на нижней части в вертикальной позиции, выполняется функция часов. Когда центр гибкого устройства 100 отображения изгибается на 90°, может выполняться функция переносного PC. В этом случае, одна из сложенных областей отображает программируемую клавиатуру, а другая область отображает окно отображения. В дополнение (или вместо) вышеозначенного, гибкое устройство может быть осуществлено в различных формах.
[404] Согласно вышеописанным различным вариантам осуществления, гибкое устройство может определять различные типы форм изгиба с использованием множества датчиков движения в дополнение к таким датчикам, как датчики изгиба или датчики касания. Когда определена форма изгиба, гибкое устройство может выполнять функцию, сопоставленную с формой изгиба.
[405] Фиг. 59 является блок-схемой последовательности операций для того, чтобы иллюстрировать способ для управления работой гибкого устройства согласно различным вариантам осуществления настоящего раскрытия сущности.
[406] Ссылаясь на фиг. 59, множество датчиков движения, которые располагаются в различных местоположениях по всей поверхности гибкого устройства, выводят считываемые значения на этапе S5800.
[407] Гибкое устройство 100 определяет форму изгиба с использованием считываемых значений на этапе S5810. Чтобы определять форму изгиба, гибкое устройство 100 может определять по меньшей мере одно из направления изгиба, степени изгиба, области изгиба и формы изгиба посредством сравнения результатов считывания изменений в позициях посредством множества датчиков движения. Гибкое устройство 100 определяет форму изгиба посредством сравнения результатов определения и информации формы изгиба, которая записывается в базе данных. Результаты считывания изменений позиций могут включать в себя угол наклона в продольном направлении, угол наклона в поперечном направлении и угол относительно вертикальной оси, которые вычислены на основе считываемых значений, выводимых из датчиков движения. Местоположения размещения и конфигурации датчиков движения, способ для вычисления угла наклона в продольном направлении, угла наклона в поперечном направлении и угла относительно вертикальной оси и способ для определения формы изгиба описаны выше, и лишнее пояснение опускается.
[408] Соответственно, операция, соответствующая форме изгиба, выполняется на этапе S5820. Форма изгиба может включать в себя различные типы изгиба, такие как общий изгиб, складывание, мультиизгиб, изгиб и перемещение, изгиб и перевод в плоское состояние, изгиб и удержание, изгиб и скручивание, скручивание, верчение, встряхивание и прокатывание. Работа гибкого устройства может варьироваться согласно характеристикам изгиба, таким как тип изгиба, местоположение изгиба, направление изгиба, степень изгиба, скорость изгиба, число раз, когда возникает изгиб, и время изгиба и рабочий режим гибкого устройства в то время, когда выполняется изгиб.
[409] Например, гибкое устройство может завершать функцию или приложение, которое выполнено, и может выполнять новую функцию или приложение. Гибкое устройство также может выполнять подфункцию, принадлежащую текущей выполняемой функции или приложению, согласно форме изгиба. Например, как показано на фиг. 46 и 47, может выполняться функция, которая поддерживается посредством текущего выполняемого приложения, такая как переключение каналов или установка закладки. Помимо этого, гибкое устройство может преобразовывать рабочий режим согласно форме изгиба. Например, когда изгиб выполняется в то время, когда гибкое устройство работает в одном из режима работы камеры и режима видеозаписи, режим может быть преобразован в другой режим из режима работы камеры и режима видеозаписи. Вид экрана также может быть изменен согласно форме изгиба. Новый экран может отображаться в области, которая разграничивается посредством формы изгиба, либо объекты, отображенные на экране, такие как, изображение, фотография, текст и значок, могут плавно перемещаться в направлении наклона согласно форме изгиба.
[410] Различные операции, соответствующие формам изгиба, подробно описаны в вышеописанных вариантах осуществления, и в силу этого дополнительная иллюстрация и пояснение не предоставляются.
[411] В варианте осуществления, в котором дополнительно предоставляются элементы для того, чтобы считывать действие пользователя, такие как датчик касания, кнопка, датчик давления, датчик силы захвата и бесконтактный датчик, способ для управления работой гибкого устройства дополнительно может включать в себя управление состоянием активации каждого из множества датчиков движения согласно тому, считывается действие пользователя или нет.
[412] Когда дополнительно включен датчик изгиба, и считывается предварительно определенная калибровочная форма, способ для управления работой гибкого устройства дополнительно может включать в себя вычисление значения компенсации на основе считываемого значения, выводимого из датчика изгиба в то время, когда считывается калибровочная форма, и компенсации считываемого значения датчика изгиба с использованием значения компенсации.
[413] Способ для определения формы изгиба и способ для управления работой гибкого устройства согласно вышеописанным различным вариантам осуществления могут быть реализованы посредством использования программы и предоставлены для гибкого устройства отображения.
[414] Может предоставляться энергонезависимый машиночитаемый носитель, который сохраняет программу для осуществления способа, включающего в себя: вывод считываемых значений множества датчиков движения, смонтированных на корпусе гибкого устройства, определение формы изгиба корпуса с использованием считываемых значений множества датчиков движения и выполнение операции, соответствующей форме изгиба.
[415] Энергонезависимый машиночитаемый носитель означает носитель, который сохраняет данные полупостоянно вместо сохранения данных в течение очень короткого времени, такой как регистр, кэш и запоминающее устройство, и является считываемым посредством устройства. Вышеописанные различные приложения или программы могут быть сохранены на энергонезависимом машиночитаемом носителе, таком как компакт-диск (CD), универсальный цифровой диск (DVD), жесткий диск, Blu-Ray-диск, универсальная последовательная шина (USB), карта памяти и постоянное запоминающее устройство (ROM.
[416] Хотя настоящее раскрытие сущности показано и описано со ссылкой на его различные варианты осуществления, специалисты в данной области техники должны понимать, что различные изменения по форме и содержанию могут вноситься без отступления от сущности и объема изобретения, заданного посредством прилагаемой формулы изобретения и ее эквивалентов.
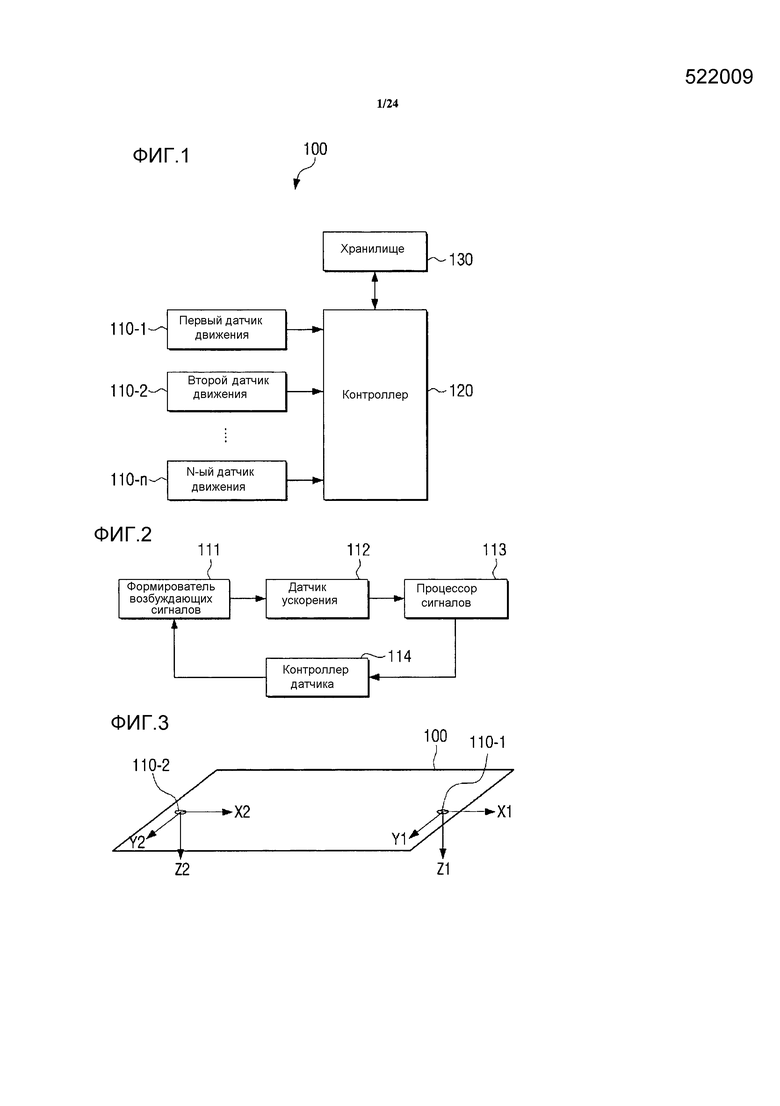
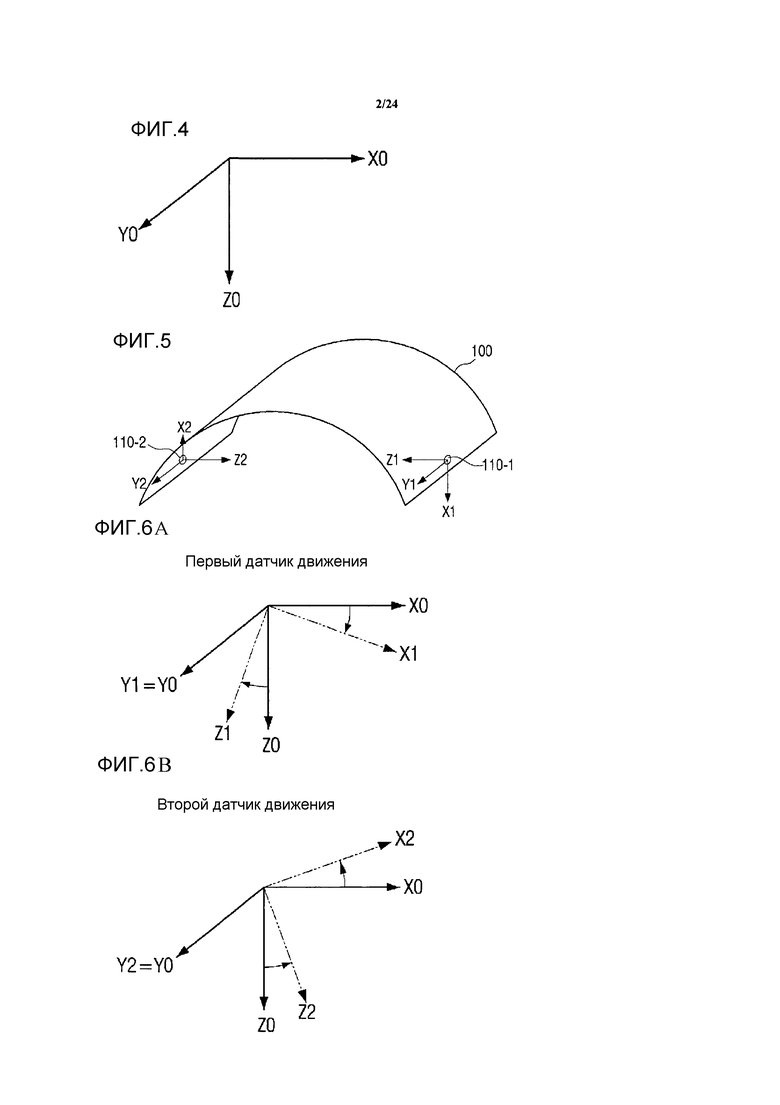
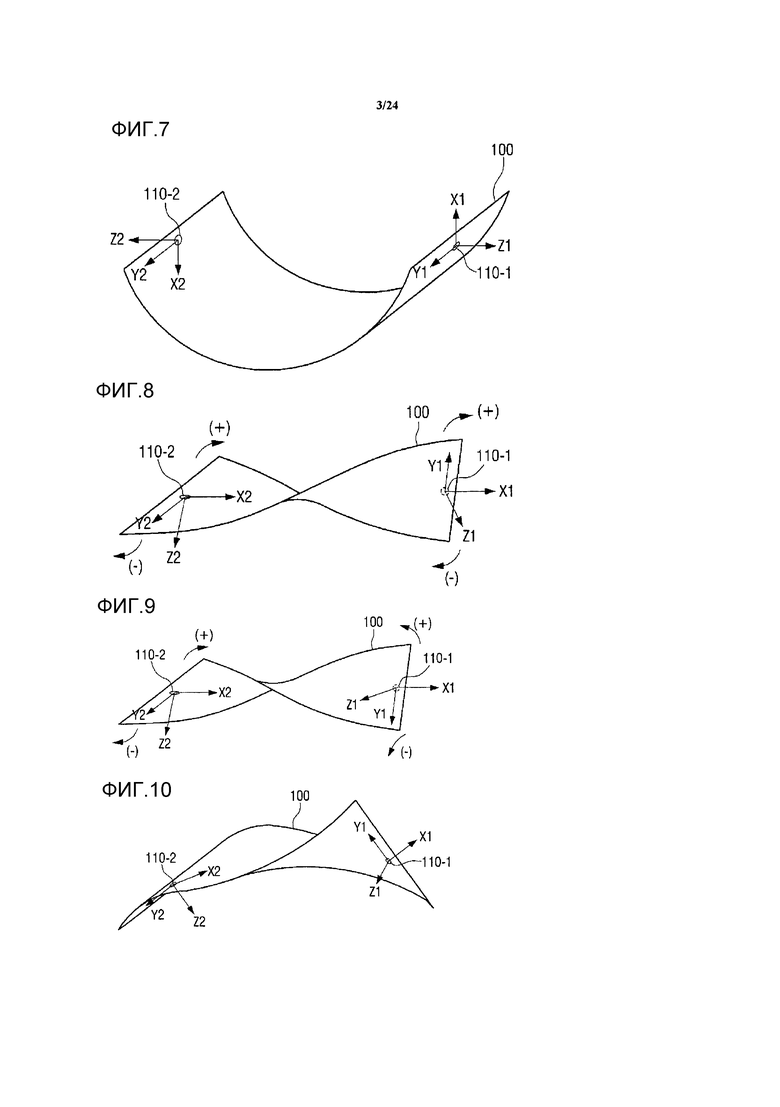
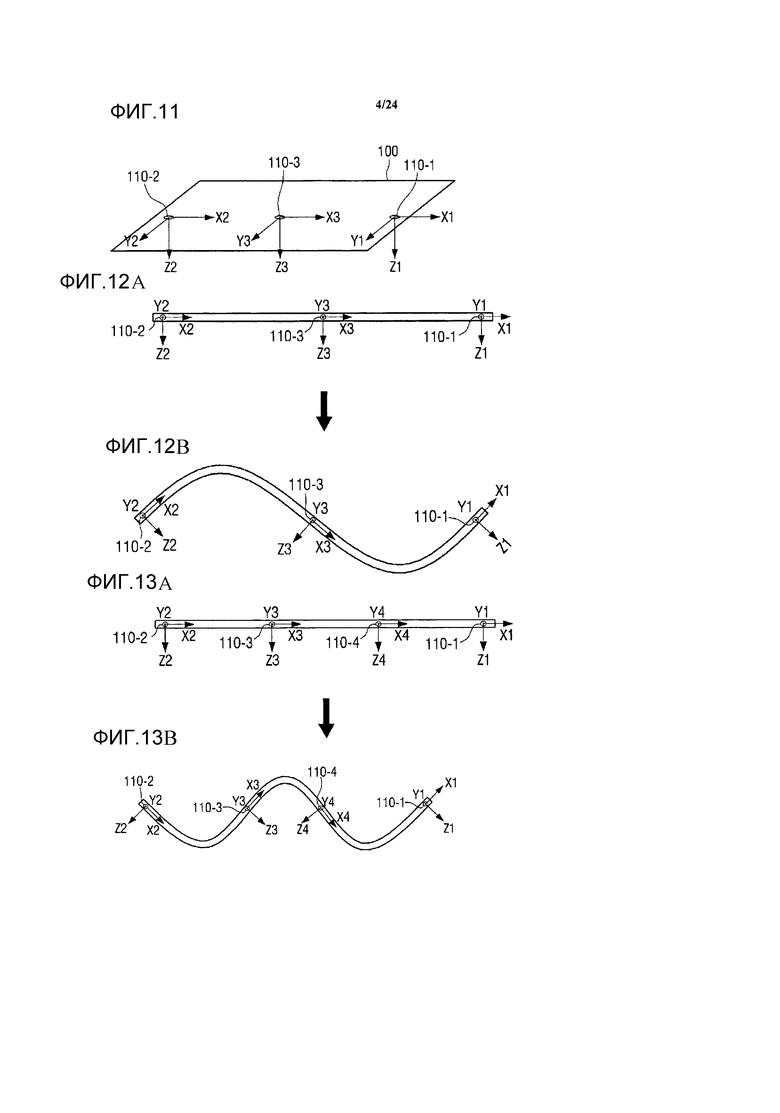
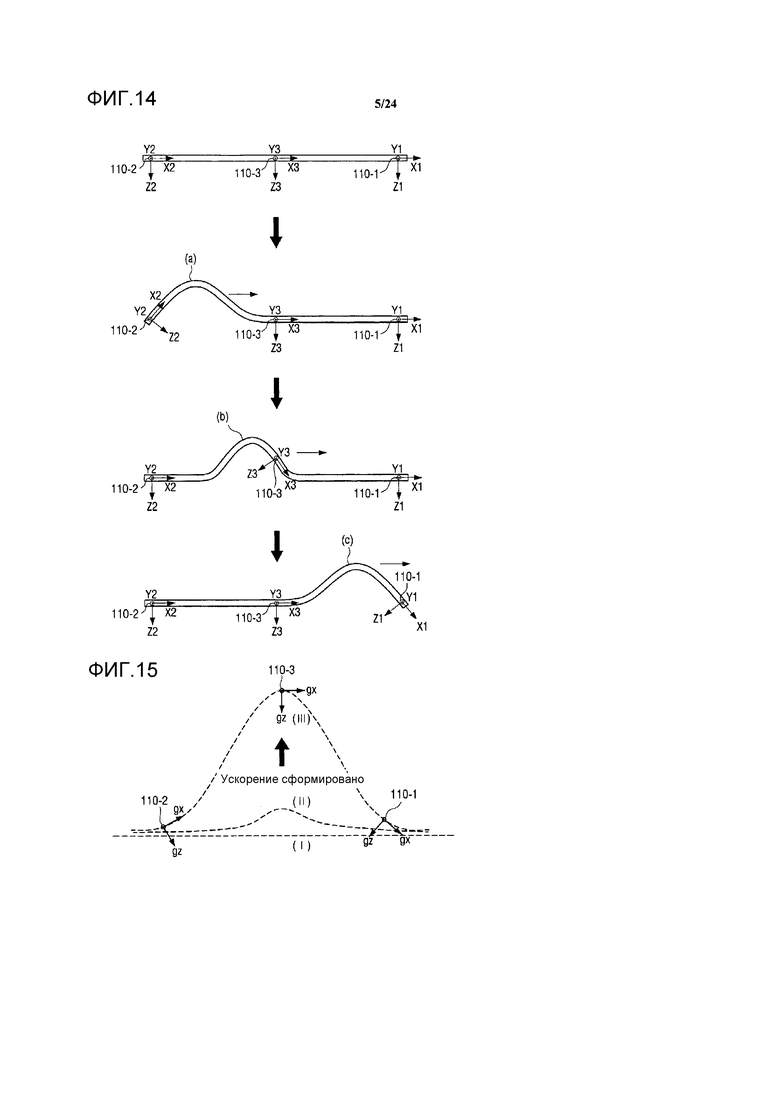
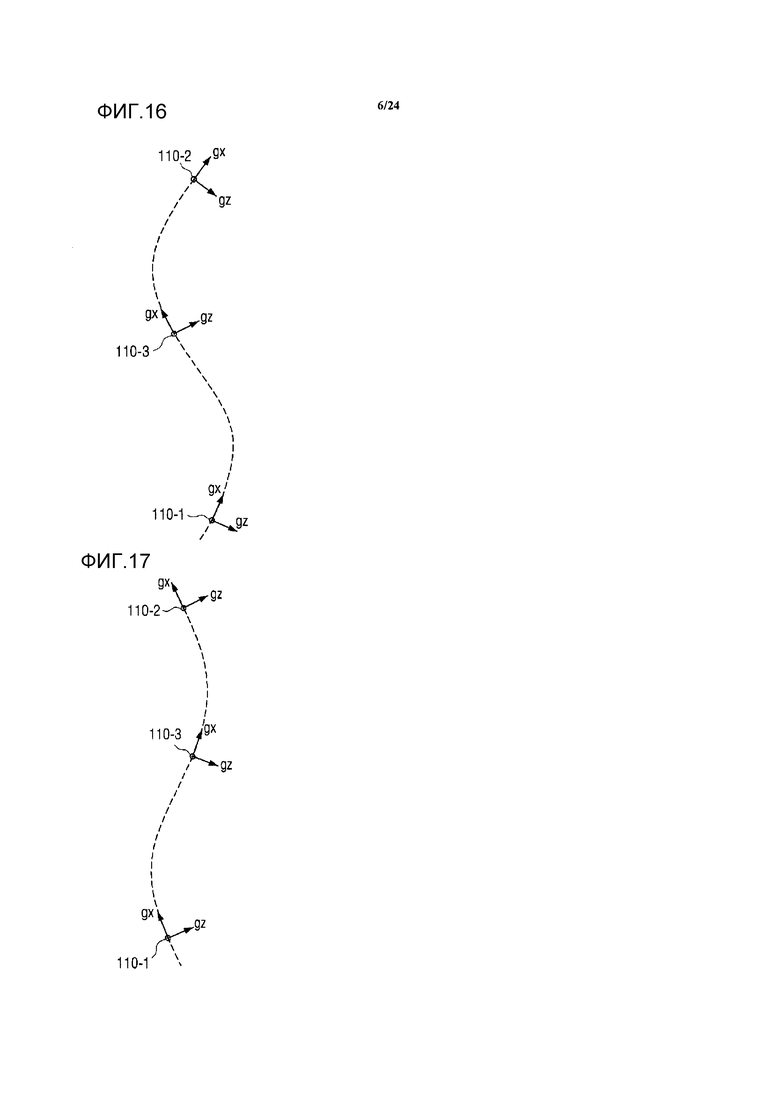
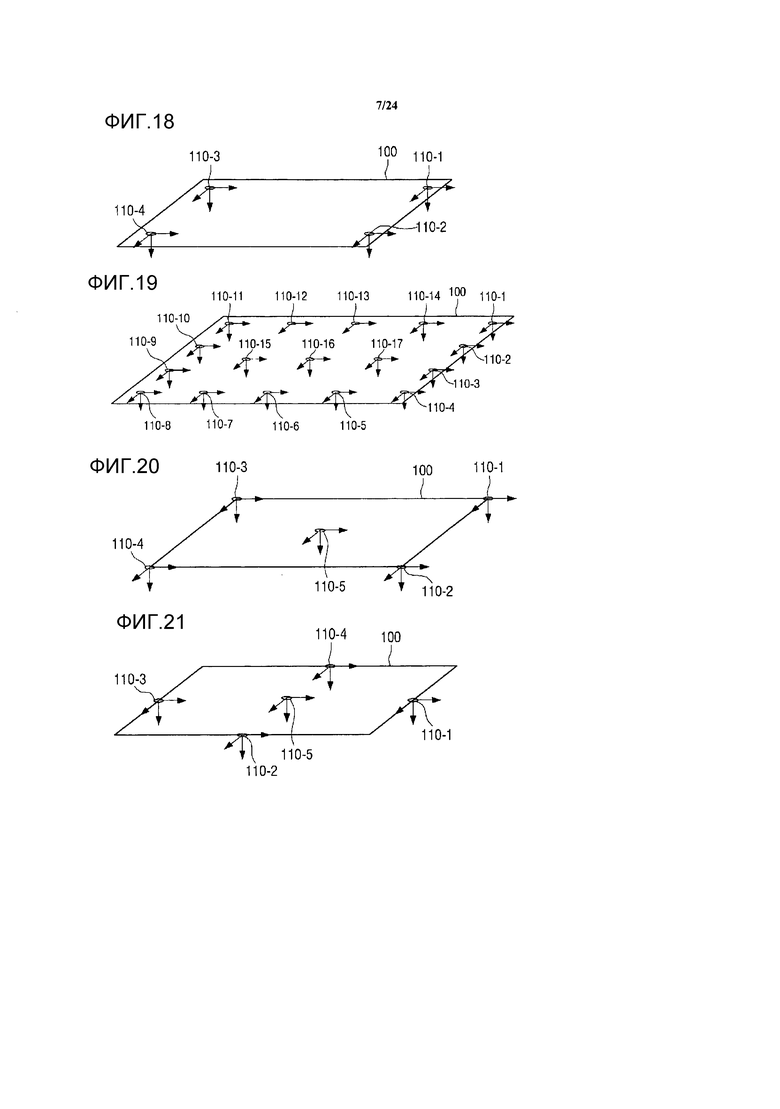
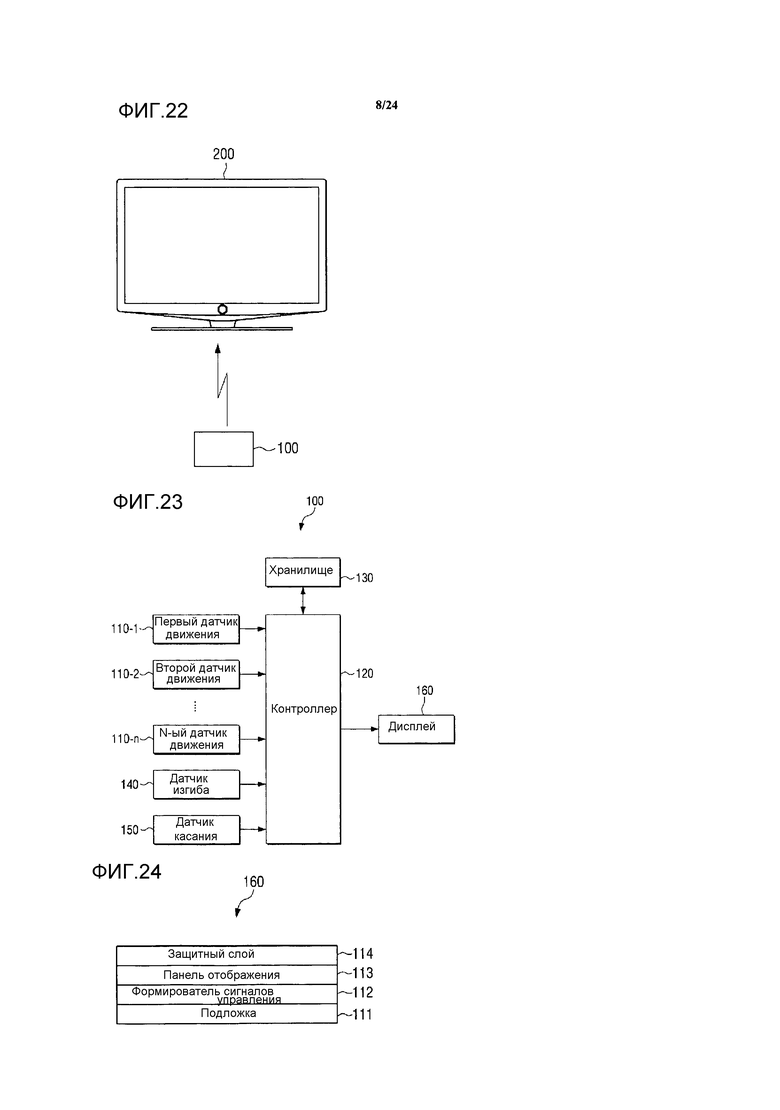
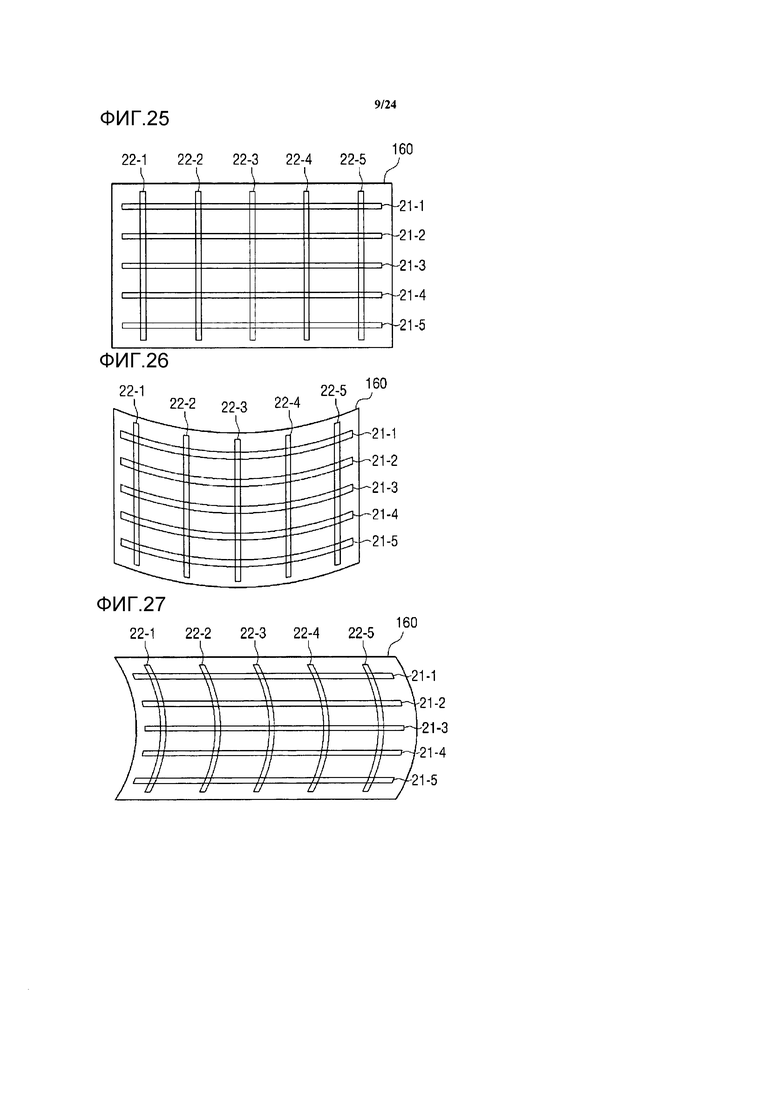
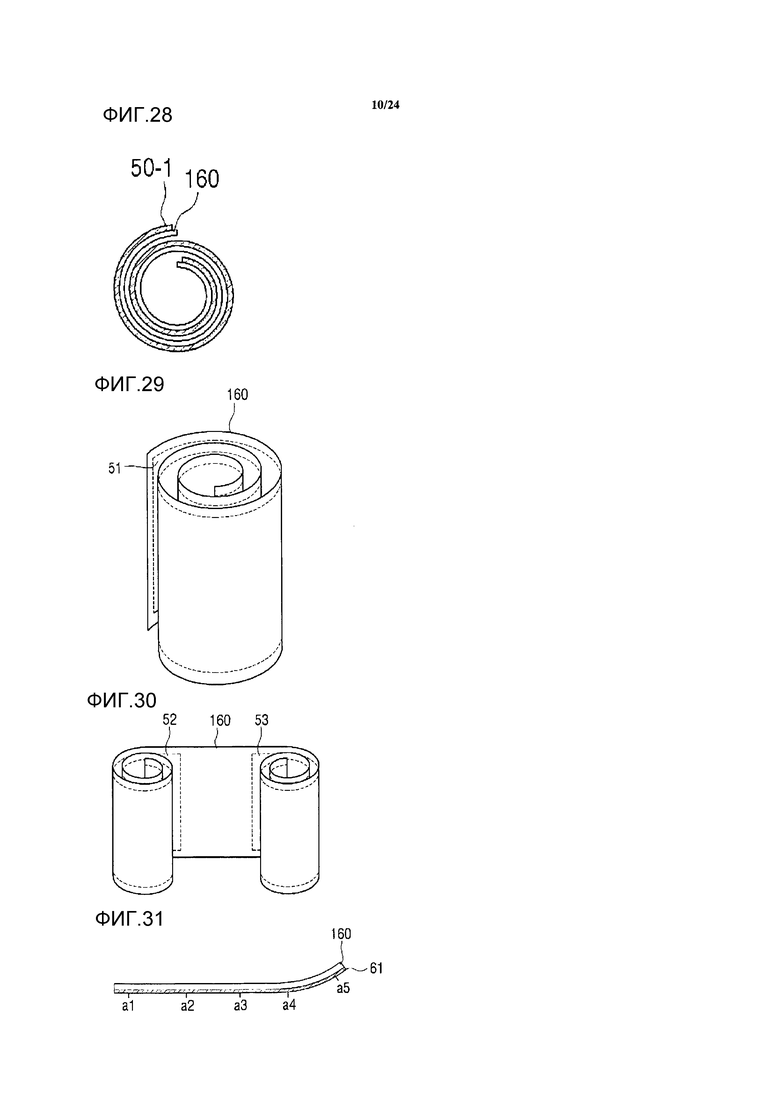
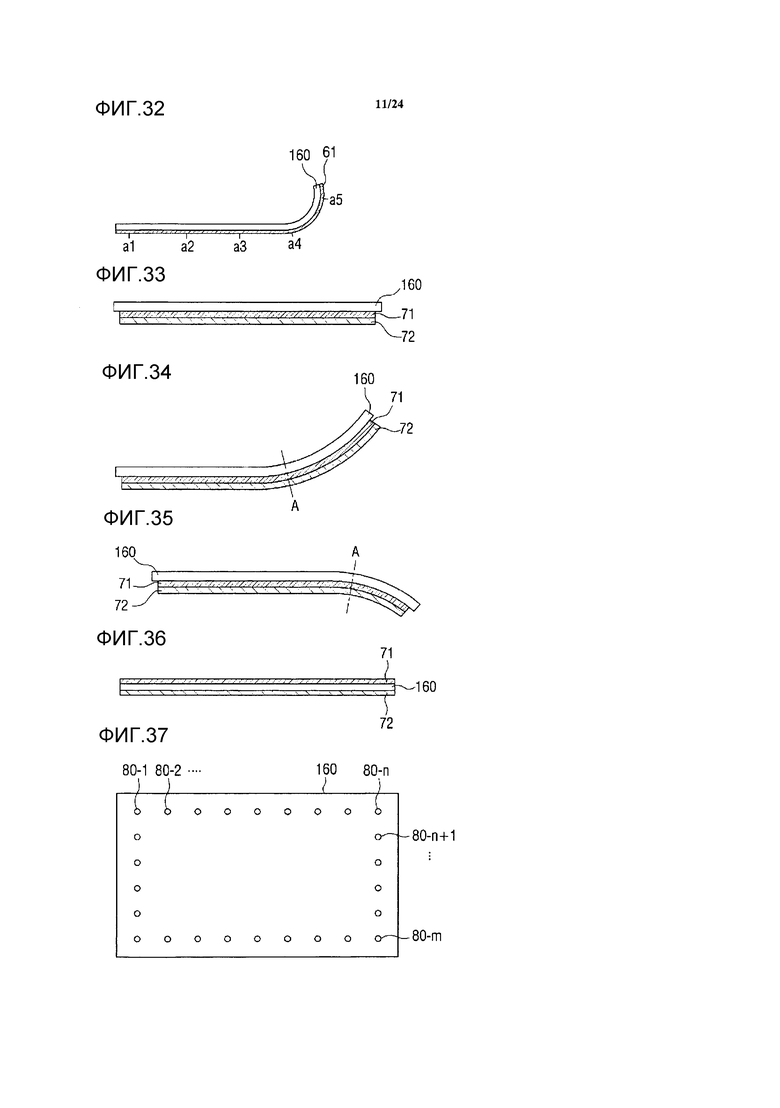
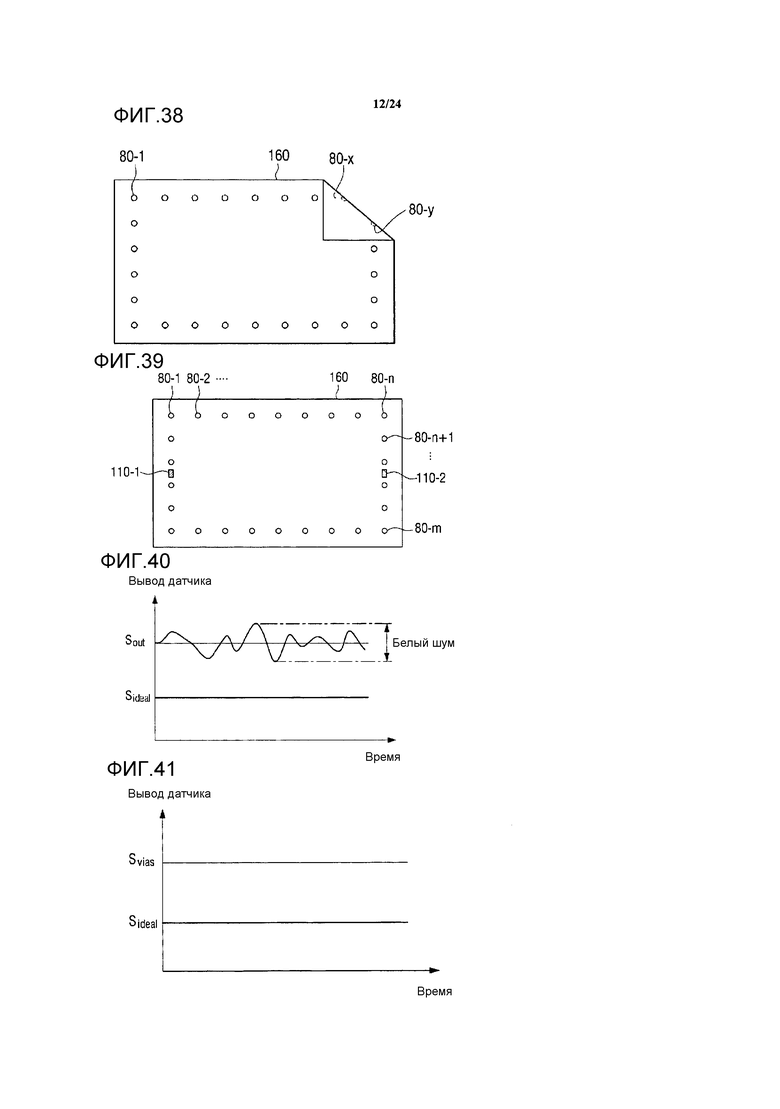
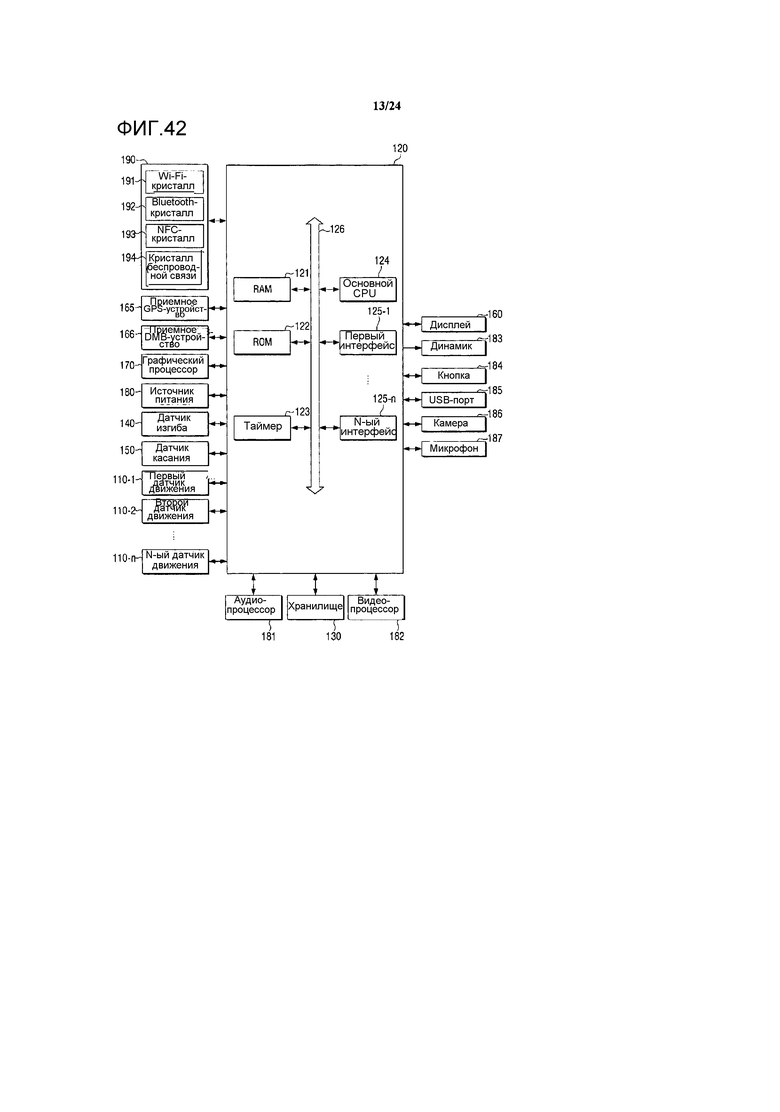
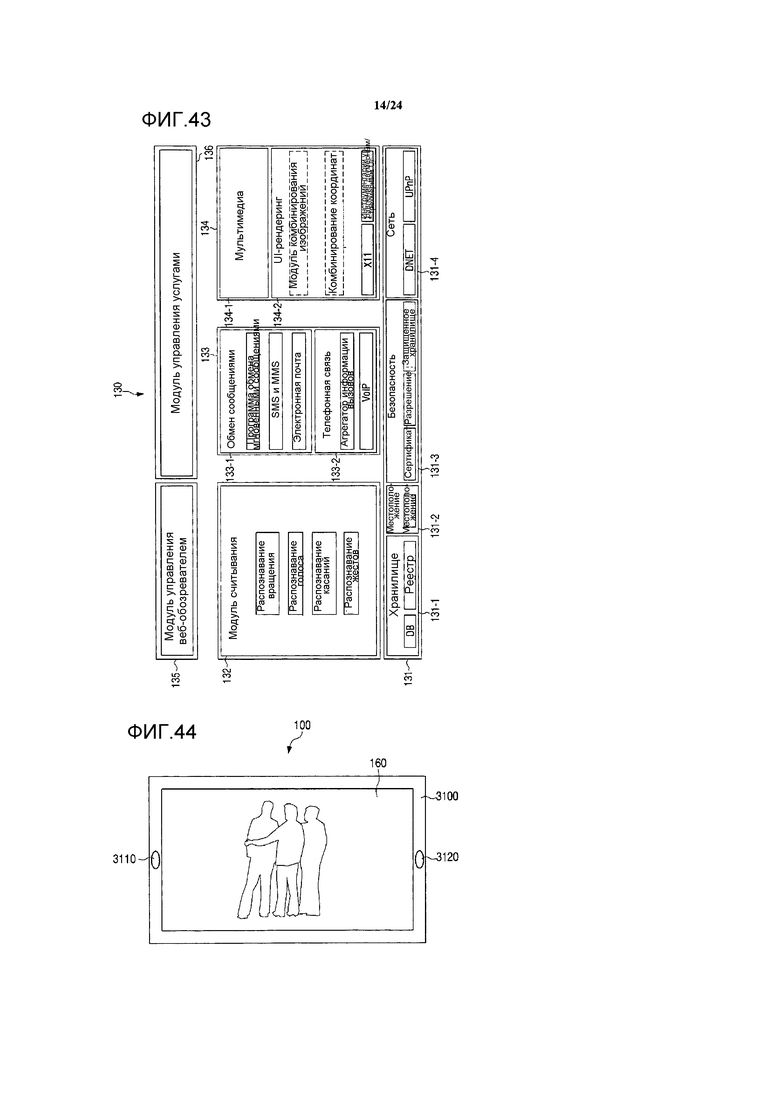
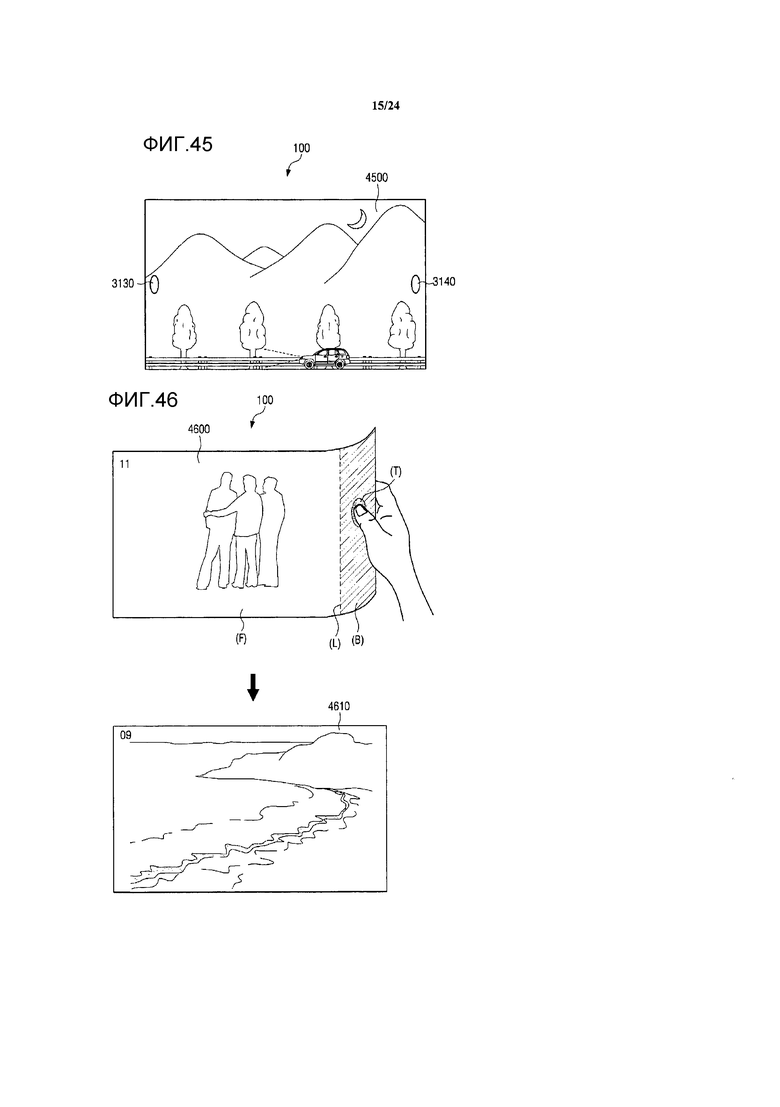
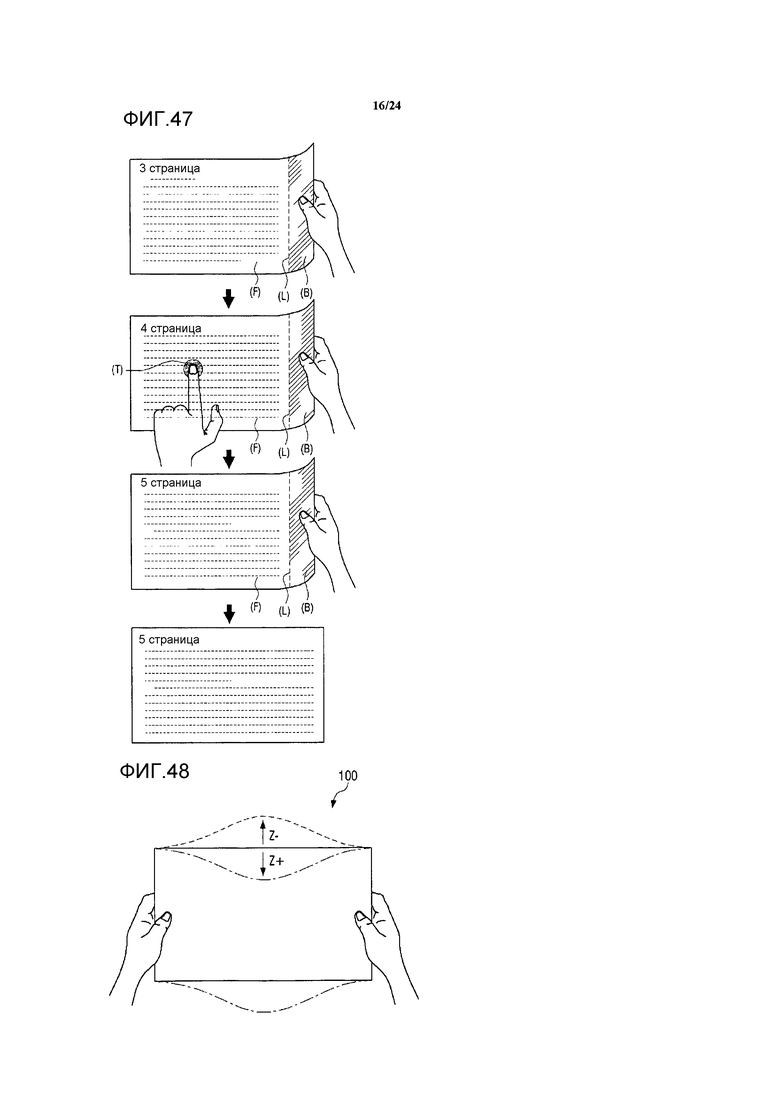
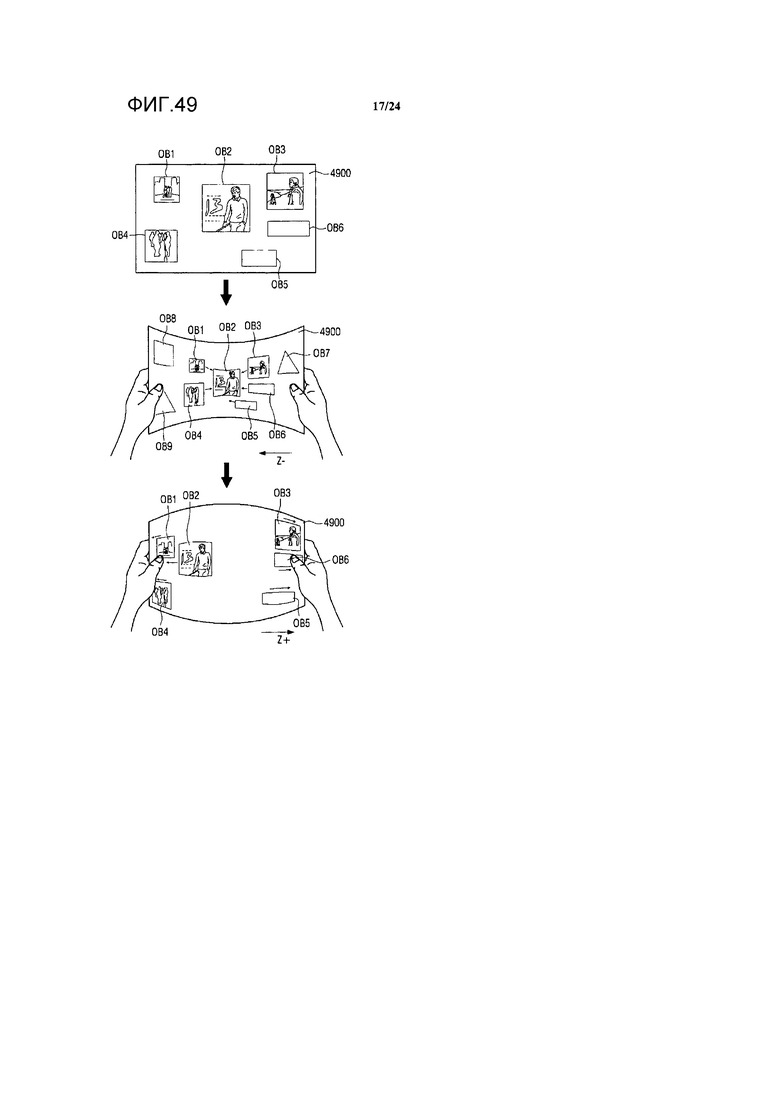
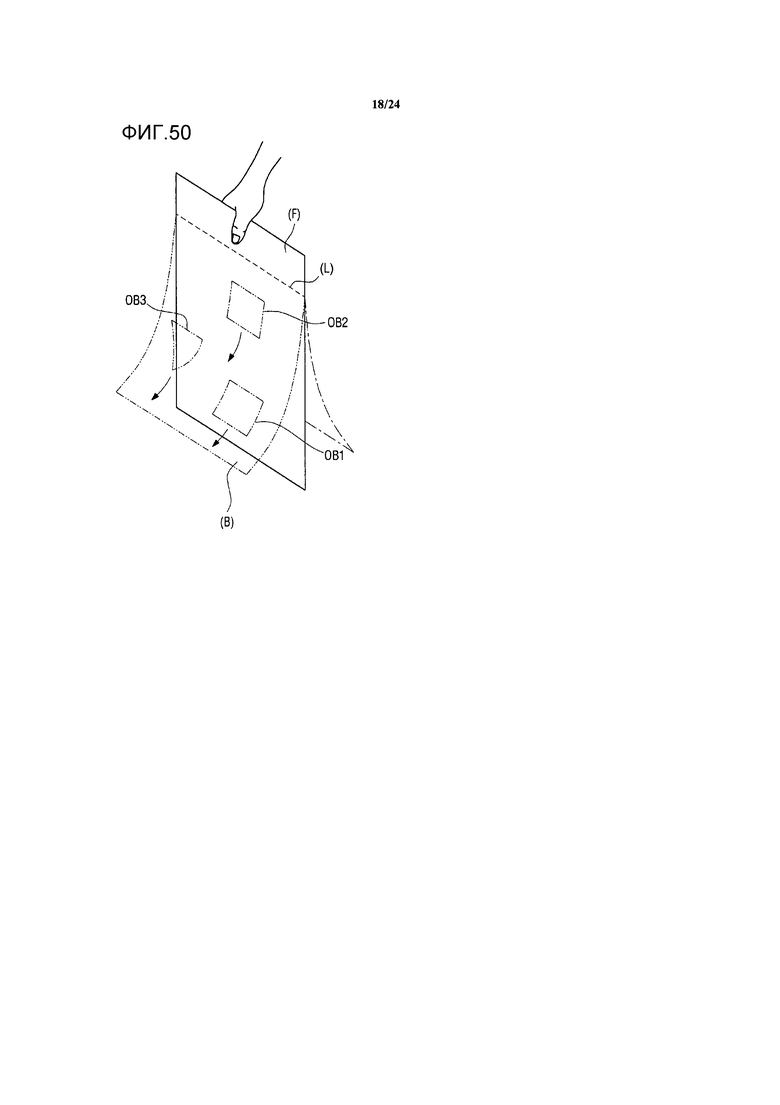
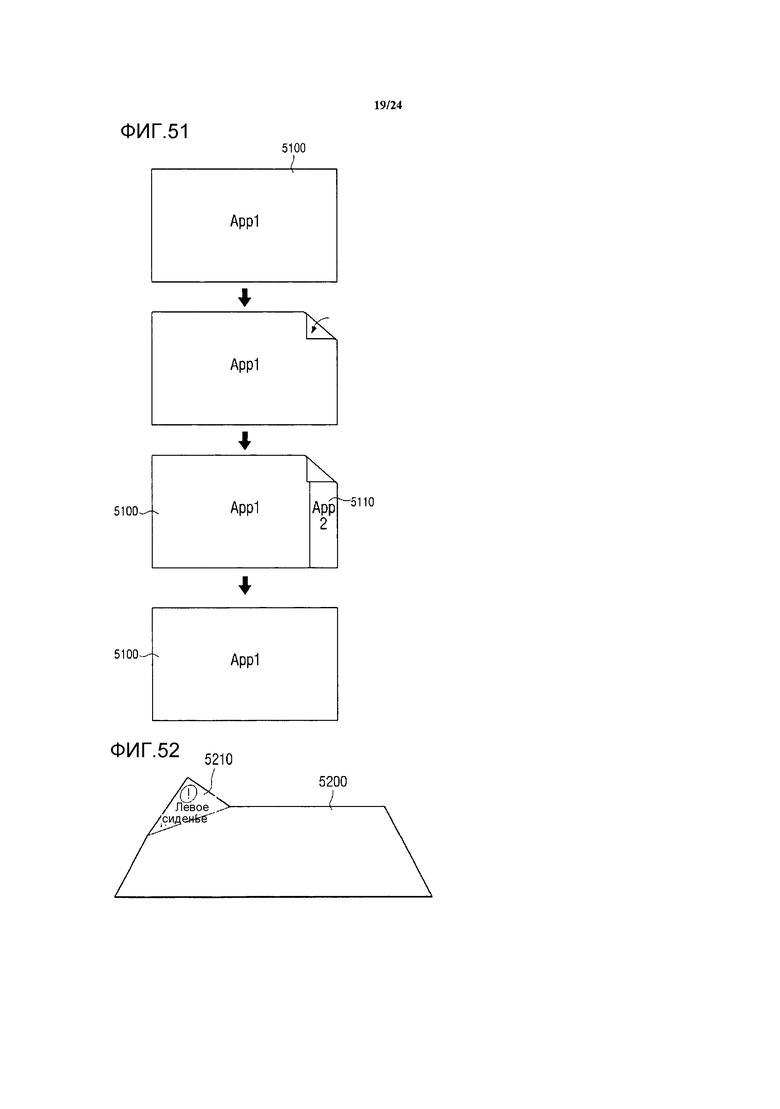
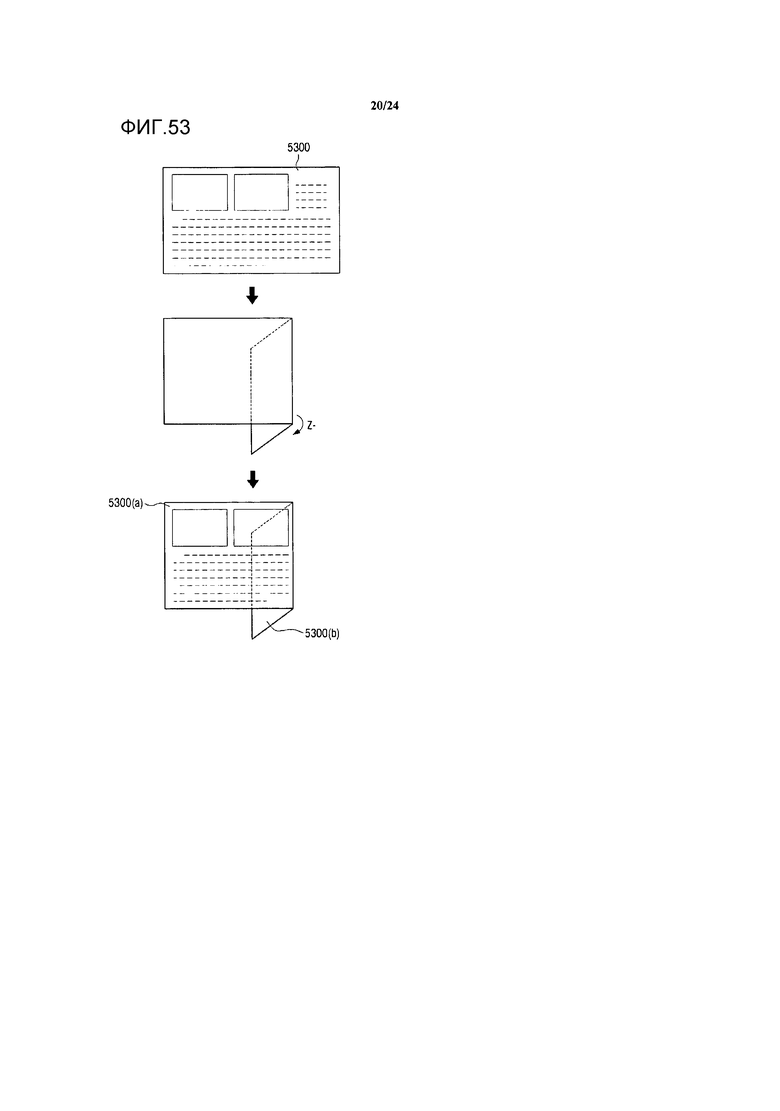
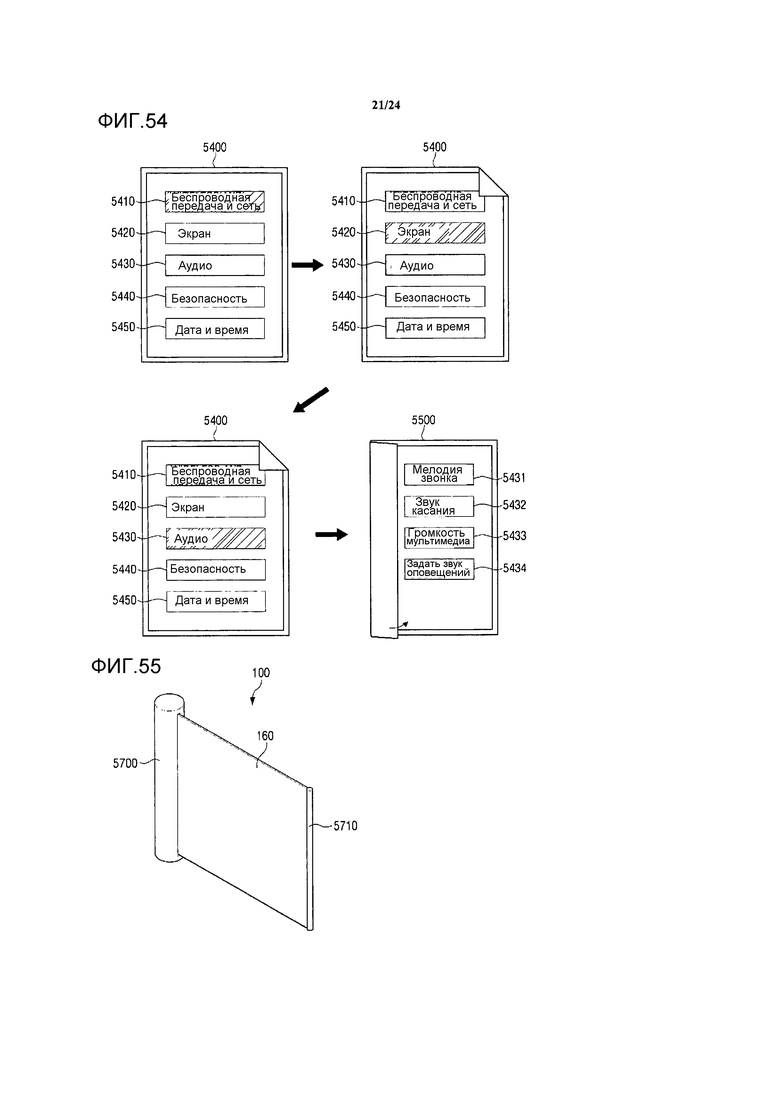
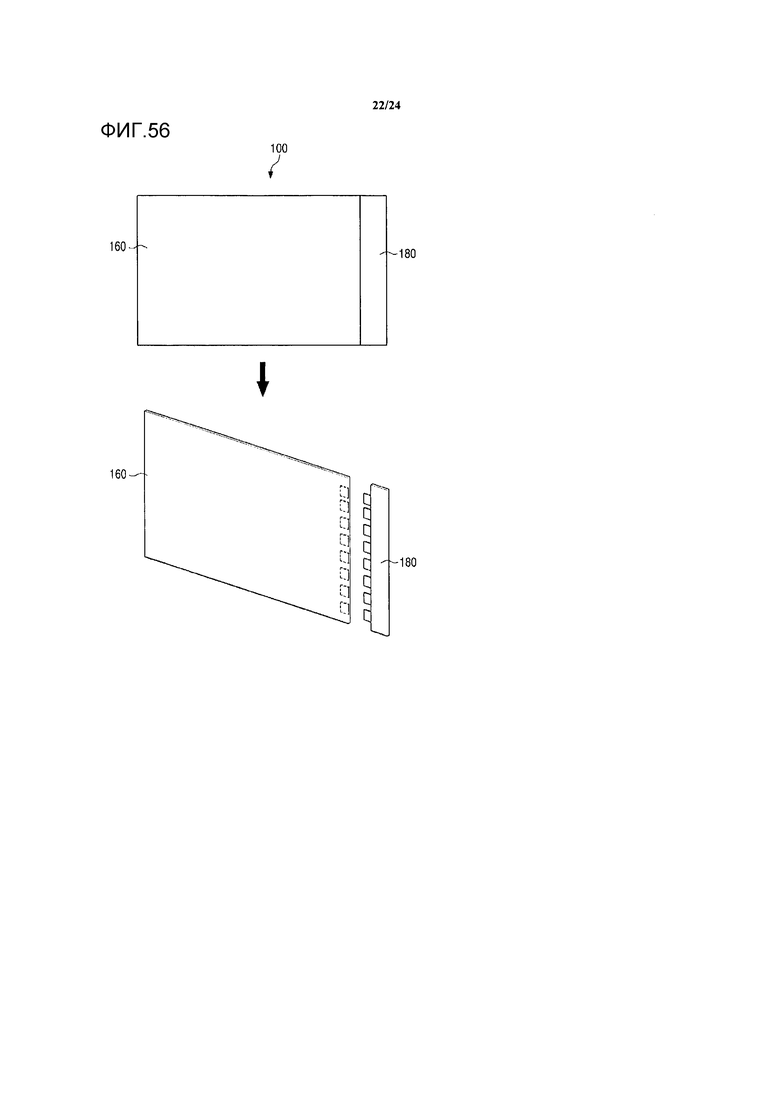
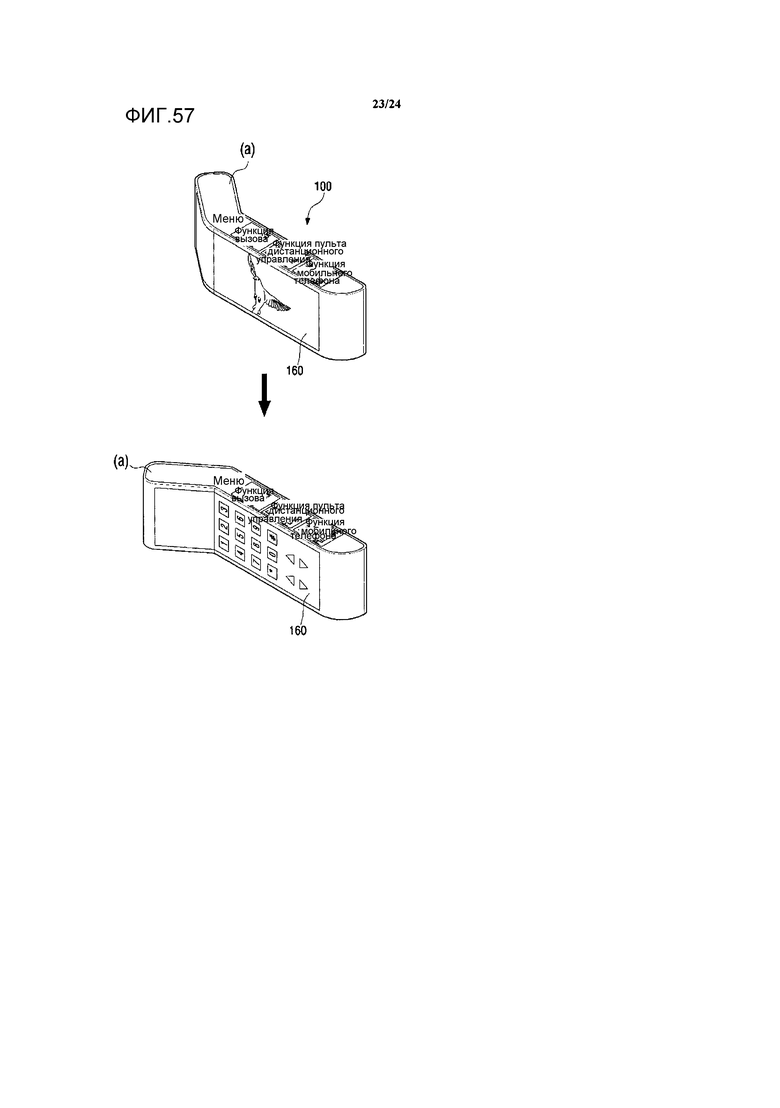
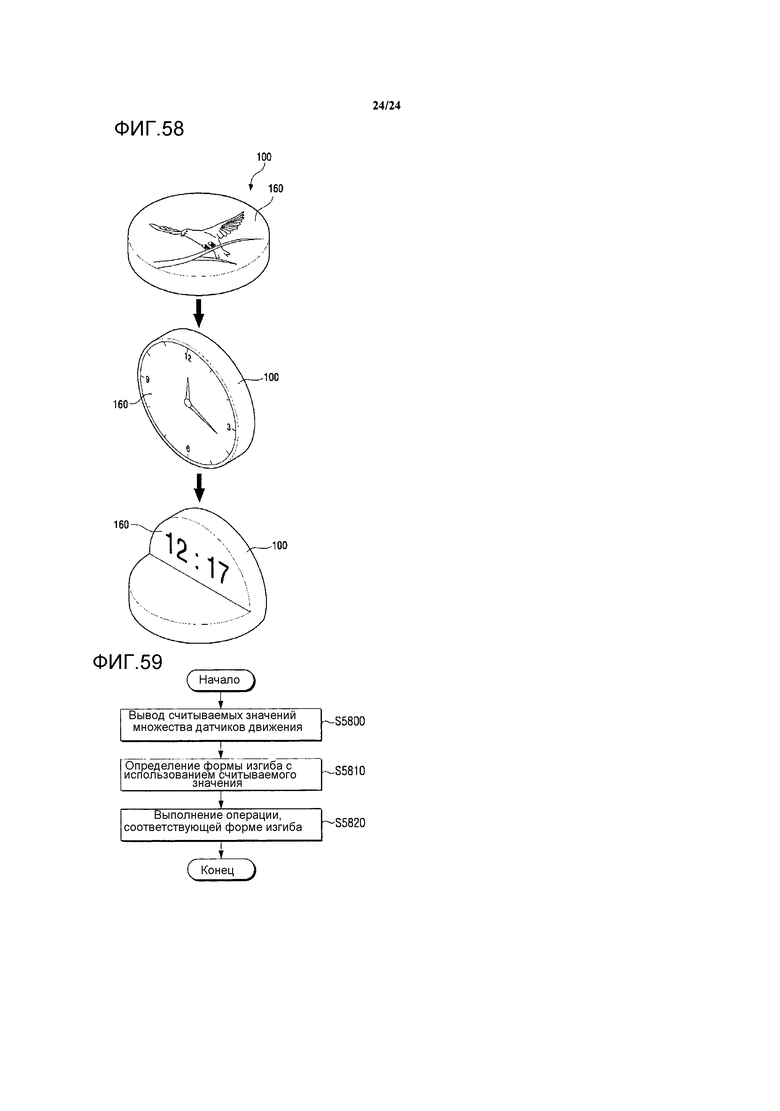
Изобретение относится к гибкому устройству и способу для управления его работой. Технический результат заключается в обеспечении возможности определять устройством форму его изгиба с использованием множества датчиков движения. Гибкое устройство включает в себя множество датчиков движения, смонтированных в различных местоположениях гибкого устройства, хранилище, выполненное с возможностью сохранять оперативную информацию гибкого устройства, соответствующую форме изгиба, и контроллер, выполненный с возможностью определять форму изгиба гибкого устройства на основе считываемого значения каждого из множества датчиков движения и выполнять операцию, соответствующую определенной форме изгиба, на основе оперативной информации, сохраненной в хранилище. 2 н. и 13 з.п. ф-лы, 62 ил.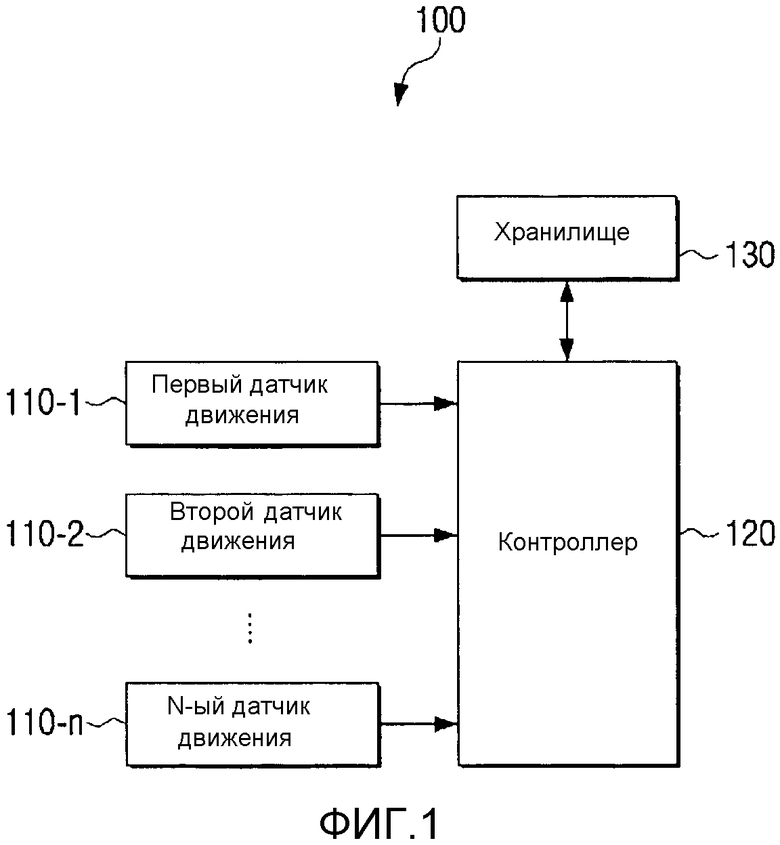
1. Гибкое устройство отображения, содержащее:
гибкий дисплей;
датчик касания, выполненный с возможностью считывания операции удержания краевой области гибкого устройства отображения;
множество датчиков движения, смонтированных в различных местоположениях гибкого устройства отображения;
хранилище, выполненное с возможностью сохранять оперативную информацию гибкого устройства отображения, соответствующую форме изгиба; и
контроллер, выполненный с возможностью определять форму изгиба гибкого устройства отображения на основе считываемого значения каждого из множества датчиков движения только в то время, когда удержание обнаруживается датчиком касания, и выполнять операцию, соответствующую определенной форме изгиба, на основе оперативной информации, сохраненной в хранилище.
2. Гибкое устройство отображения по п. 1, в котором контроллер получает изменение считываемого значения каждого из множества датчиков движения и определяет форму изгиба на основе разности между измененными считываемыми значениями, и
при этом форма изгиба содержит степень изгиба и направление изгиба.
3. Гибкое устройство отображения по п. 1, в котором множество датчиков движения представляют собой датчики, которые считывают изменение позиции в отношении по меньшей мере одной из трехмерных пространственных осей.
4. Гибкое устройство отображения по п. 1, в котором множество датчиков движения располагается в угловых областях гибкого устройства отображения.
5. Гибкое устройство отображения по п. 1, в котором множество датчиков движения содержит:
первый датчик движения, расположенный в центре первой краевой области из числа краевых областей гибкого устройства отображения; и
второй датчик движения, расположенный в центре второй краевой области, которая обращена к первой краевой области, из числа краевых областей гибкого устройства отображения.
6. Гибкое устройство отображения по п. 1, дополнительно содержащее:
датчик касания, выполненный с возможностью считывать касание пользователя,
при этом контроллер активирует множество датчиков движения согласно касанию пользователя.
7. Гибкое устройство отображения по п. 1, дополнительно содержащее:
датчик изгиба, выполненный с возможностью считывать состояние изгиба гибкого устройства отображения, при этом контроллер определяет форму изгиба на основе выходного значения датчика изгиба и считываемых значений множества датчиков движения.
8. Гибкое устройство отображения по п. 7, в котором, когда считывается предварительно определенная калибровочная форма, контроллер вычисляет значение компенсации на основе считываемого значения, которое выводится из датчика изгиба в то время, когда считывается калибровочная форма, и компенсирует считываемое значение датчика изгиба на основе значения компенсации.
9. Гибкое устройство отображения по п. 1, в котором множество датчиков движения содержит по меньшей мере одно из датчика ускорения, геомагнитного датчика и гиродатчика.
10. Гибкое устройство отображения по п. 9, в котором контроллер определяет по меньшей мере одно из общего изгиба, складывания, мультиизгиба, изгиба и перемещения, изгиба и перевода в плоское состояние, изгиба и удержания, изгиба и скручивания, скручивания, верчения, встряхивания и прокатывания на основе изменения по меньшей мере одного из угла наклона в продольном направлении, угла наклона в поперечном направлении и угла относительно вертикальной оси, которые считываются посредством множества датчиков движения.
11. Гибкое устройство отображения по п. 1, дополнительно содержащее дисплей, выполненный с возможностью отображать экран, соответствующий форме изгиба.
12. Гибкое устройство отображения по п. 11, в котором, когда изгиб возникает в то время, когда множество меню отображаются на дисплее, контроллер выполняет операцию навигации по меню для множества меню согласно форме изгиба, и
при этом операция навигации по меню содержит по меньшей мере одну из операции перемещения меню, операции выбора меню, операции изменения страницы меню, операции прокрутки меню, операции отображения главного меню и подменю и операции переключения между главным меню и подменю.
13. Способ для управления работой гибкого устройства отображения, при этом способ содержит этапы, на которых:
выводят, посредством множества датчиков движения, смонтированных в различных местоположениях гибкого устройства отображения, считываемые значения;
обнаруживают, посредством датчика касания, операцию удержания краевой области гибкого устройства;
определяют форму изгиба изогнутого гибкого устройства отображения посредством сравнения считываемых значений множества датчиков движения только в то время, когда удержание обнаруживается датчиком касания; и
выполняют операцию, соответствующую форме изгиба.
14. Способ по п. 13, в котором определение формы изгиба содержит этапы, на которых:
получают изменение считываемого значения каждого из множества датчиков движения; и
определяют форму изгиба на основе разности между измененными считываемыми значениями,
при этом форма изгиба содержит степень изгиба и направление изгиба.
15. Способ по п. 13, в котором множество датчиков движения представляют собой датчики, которые считывают изменение позиции в отношении по меньшей мере одной из трехмерных пространственных осей, и
при этом определение формы изгиба содержит этап, на котором определяют по меньшей мере одно из направления изгиба, степени изгиба, области изгиба и формы изгиба посредством сравнения результатов считывания изменений позиций посредством множества датчиков движения.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| ГИБКИЙ ДИСПЛЕЙ | 2006 |
|
RU2318230C2 |

