Изобретение относится к области машиностроения, гидравлическим и пневматическим приводам, работающим от воздействия газа или жидкости.
Известны мембранные приводы (см. Гуревич Д.Ф. Расчет и конструирование трубопроводной арматуры. М.: Машиностроение, 1964, с. 275-280), состоящие из корпуса с рабочей камерой, ограниченной мембраной с жестким центром. Мембрана соединена через закрепленный на ней жесткий центр со штоком, выполняющим функцию подвижного рабочего органа.
Привод работает следующим образом. При повышении давления рабочей среды в рабочей камере мембрана прогибается, перемещая шток. Перемещение штока создается силовым воздействием на мембрану давления рабочей среды. Силовое воздействие на штоке зависит от величины давления в рабочей камере, а также от эффективной площади мембраны, определяемой соотношением размеров жесткого центра и мембраны. В отечественных и зарубежных работах (см. Сысоев С.Н. Элементы гидравлического и пневматического оборудования: Учеб. пособие / Владим. гос. ун-т; Владимир, 2001, с. 32) данное соотношение ориентировочно принимают равным 0,6-0,8.
Увеличение размера жесткого центра относительно мембраны приводит к двум противоположным процессам. С одной стороны, большее ограничение изгибной деформации центральной части мембраны приводит к увеличению ее эффективной площади, увеличивая создаваемую давлением рабочей среды силу на штоке. С другой стороны, это уменьшает величину деформируемой части мембраны, что приводит к уменьшению величины хода штока.
В данных устройствах, имеющих постоянную эффективную площадь мембраны, ход штока и силу настраивают перед началом работы только величиной давления рабочей среды, что ограничивает функциональные возможности привода и область его применения.
Известны мембранные приводы (см. а.с. 269591 СССР: МКИ 3, F15C 5/00, G06d 1/02. Способ регулировки эффективной площади мембран в устройствах пневмо- и гидроавтоматики.), в которых мембрана выполнена с возможностью перемещения ее центра относительно плоскости ее заделки.
В данных устройствах только корректируют эффективную площадь мембраны при ее несоответствии заданной величине, обусловленном отклонениями размеров, характеристик материалов, неточностью сборки, что ограничивает функциональные возможности привода и область его применения.
Наиболее близким по технической сущности из известных является мембранный привод (см. патент №143729, Сысоева С.Н. и др., опубл. 27.07.2014 г., Бюл. №21), в котором в процессе функционирования используют изменение эффективной площади мембраны. Жесткий центр мембраны выполнен из двух составных частей с возможностью разъединения при определенном силовом воздействии на него от давления рабочей среды. Части жесткого центра удерживаются от разъединения магнитной защелкой. При достижении в рабочей камере определенного давления рабочей среды силовое воздействие от него разъединяет части жесткого центра и эффективная площадь мембраны уменьшается.
Данный мембранный привод имеет расширенные функциональные возможности за счет реализации дополнительной зависимости величины перемещения подвижного рабочего органа от давления рабочей среды в рабочей камере. Однако применение ступенчатого изменения эффективной площади мембраны от величины давления в рабочей камере, отсутствие регулирования ее эффективной площади в процессе работы привода не позволяет получать разнообразные, требуемые в процессе работы величины перемещения подвижного рабочего органа. Кроме этого, нельзя получить перемещение штока при постоянной величине давления рабочей среды в рабочей камере.
Таким образом, данное устройство и все известные имеют ограниченные функциональные возможности.
Задачей изобретения является расширение функциональных возможностей мембранных приводов путем изменения эффективной площади мембран за счет регулирования изгибной податливости жесткого центра.
Поставленная задача достигается тем, что в мембранном приводе, включающим мембрану с жестким центром, соединенным со штоком, жесткий центр выполнен из эластичной оболочки, образующей герметичную камеру.
Герметичная камера может быть связана с пневмолинией избыточного давления с целью использования имеющейся пневмолинии питания привода.
Герметичная камера может быть заполнена сыпучим материалом и связана с пневмолинией разрежения воздуха, повышая жесткостные характеристики центра. Известны устройства с регулируемой жесткостной характеристикой камеры, заполненные сыпучим материалом (см. а.с. №677907, МПК В25J 15/00, «Вакуумный захват манипулятора», опубл. 05.08.79 г., БИ №29; а.с. №1284826, МПК В25J 15/00, «Захватное устройство», опубл. 23.01.87 г., БИ №3; Сысоев С.Н. Элементы гидравлического и пневматического оборудования: Учеб. пособие / Владим. гос. ун-т; Владимир, 2001, с. 74).
Герметичная камера может быть заполнена электрореологической суспензией и твердым наполнителем, а также установлены электроды, цепь питания которых связана с источником тока, что позволяет использовать для управления электропитание. Известны устройства с использованием электрореологической жидкости для регулировки жесткости камеры (см. а.с. №988550 МПК В25J 15/00 «Захват автоматического манипулятора», опубл. 15.01.83 г., БИ №2; а.с. №1093545 МПК В25J 15/00 «Схват промышленного робота», опубл. 23.05.84 г., №9; а.с. №1229035 «Схват манипулятора» МПК В25J 15/00, опубл. 07.05.86 г.).
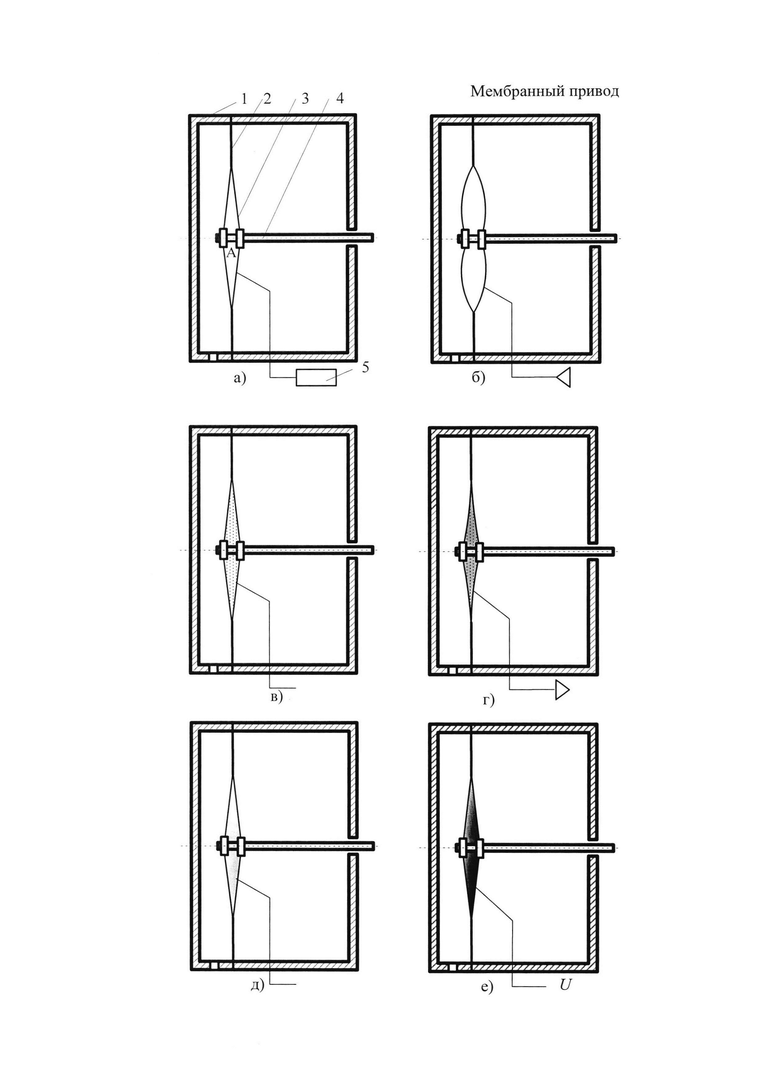
Примеры предлагаемого устройства представлены на чертеже, поз. а, 6, в, г, д, е.
Мембранный привод (фиг., поз. а) состоит из корпуса 1, мембраны 2 с жестким центром, выполненным из эластичной оболочки 3, образующей герметичную камеру А. Жесткий центр соединен со штоком 4. Герметичная камера А соединена с источником энергопитания 5. В исходном положении, когда в камере А атмосферное давление воздуха жесткий центр обладает изгибной жесткостью, приближающейся к жесткости мембраны. При повышении давления воздуха в камере уменьшается ее изгибная податливость и повышается эффективная площадь мембраны (фиг., поз. б).
На фиг., поз. в, показан вариант, когда герметичная камера заполнена сыпучим материалом. В исходном положении, когда в камере имеется атмосферное давление, ее изгибная жесткость приближающейся к жесткости мембраны. Создание давления разрежения в камере уменьшает ее изгибную податливость и повышает эффективную площадь мембраны (фиг., поз. г).
На фиг., поз. д, показан вариант, когда герметичная камера заполнена электрореологической суспензией. В исходном положении ее изгибная жесткость приближающейся к жесткости мембраны. Подача электрического питания в камеру уменьшает ее изгибную податливость и повышает эффективную площадь мембраны (фиг., поз. е).
Предлагаемое устройство расширяет функциональные возможности мембранного привода путем изменения эффективной площади мембран за счет регулирования изгибной податливости жесткого центра.
В лаборатории СКБ «Поиск» Владимирского государственного университета исследовано предлагаемое техническое решение, натурные испытания которого показали его работоспособность и эффективность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Мембранный привод | 2018 |
|
RU2697601C1 |
| Способ работы мембранного привода с жесткими центрами | 2014 |
|
RU2623080C2 |
| Мембранный привод | 2016 |
|
RU2616425C1 |
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| Камерный привод | 2019 |
|
RU2722942C1 |
| Нога шагающего аппарата | 2018 |
|
RU2709945C1 |
| Стартовое устройство | 2022 |
|
RU2801754C1 |
| Привод криволинейного перемещения | 2020 |
|
RU2736902C1 |
| Катапульта | 2024 |
|
RU2821807C1 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
Изобретение относится к области машиностроения, гидравлическим и пневматическим приводам, работающим от воздействия газа или жидкости. Задачей изобретения является расширение функциональных возможностей мембранных приводов путем изменения эффективной площади мембран за счет регулирования изгибной податливости жесткого центра. Поставленная задача достигается тем, что в мембранном приводе, включающем мембрану с жестким центром, соединенным со штоком, жесткий центр выполнен из эластичной оболочки, образующей герметичную камеру. Герметичная камера может быть связана с пневмолинией избыточного давления с целью использования имеющейся пневмолинии питания привода. Герметичная камера может быть заполнена сыпучим материалом и связана с пневмолинией разрежения воздуха, повышая жесткостные характеристики центра. Герметичная камера может быть заполнена электрореологической суспензией и твердым наполнителем, а также в ней установлены электроды, цепь питания которых связана с источником тока, что позволяет использовать для управления электропитание. Предлагаемое устройство расширяет функциональные возможности мембранного привода путем изменения эффективной площади мембран за счет регулирования изгибной податливости жесткого центра. 3 з.п. ф-лы, 1 ил.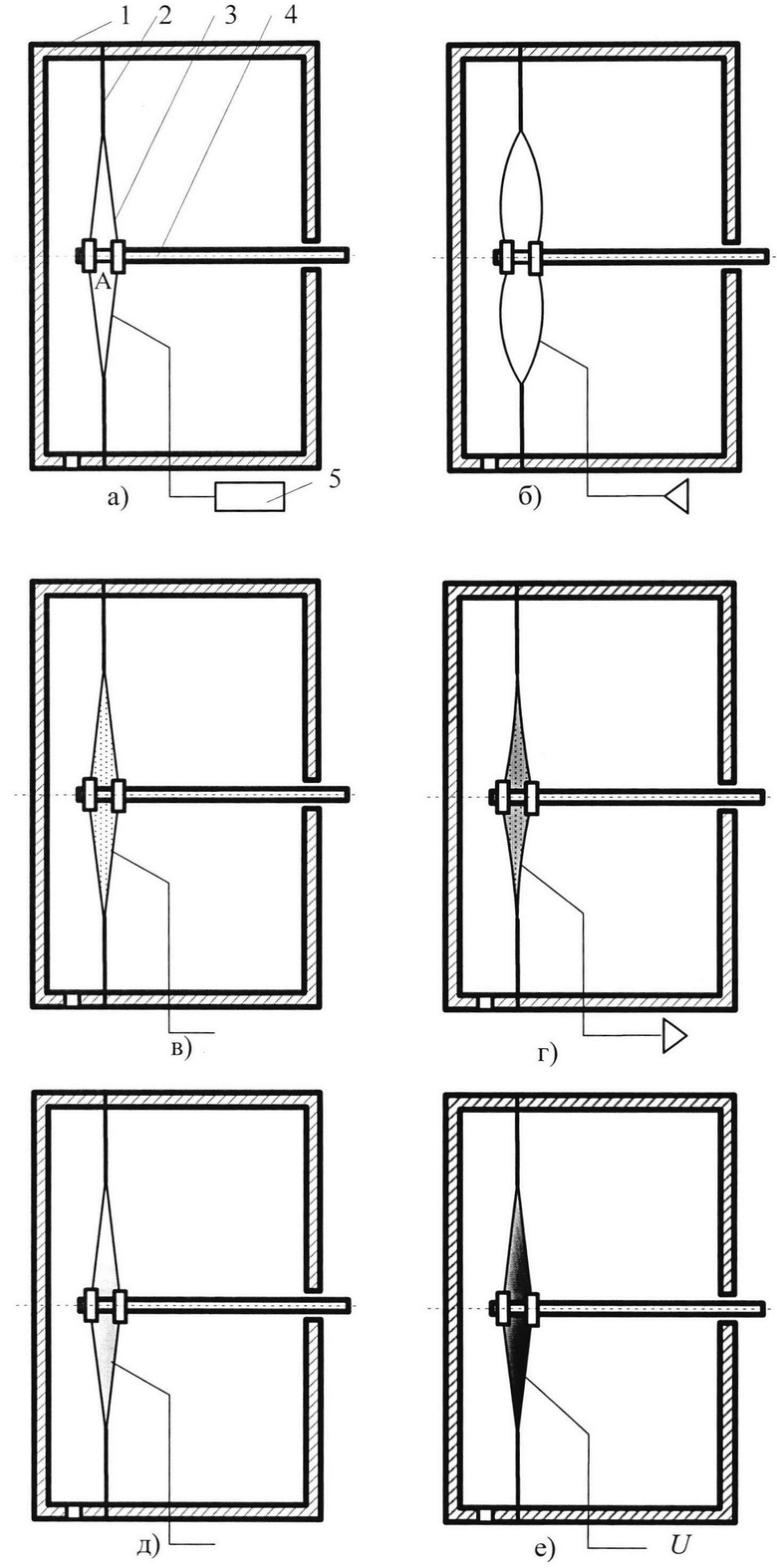
1. Мембранный привод, включающий мембрану с жестким центром, соединенным со штоком, отличающийся тем, что жесткий центр выполнен из эластичной оболочки, образующей герметичную камеру.
2. Мембранный привод по п. 1, отличающийся тем, что герметичная камера связана с пневмолинией избыточного давления.
3. Мембранный привод по п. 1, отличающийся тем, что герметичная камера заполнена сыпучим материалом и связана с пневмолинией разрежения.
4. Мембранный привод по п. 1, отличающийся тем, что герметичная камера заполнена электрореологической суспензией и твердым наполнителем, а также в ней установлены электроды, цепь питания которых связана с источником тока.
| 0 |
|
SU162577A1 | |
| Способ работы мембранного привода с жесткими центрами | 2014 |
|
RU2623080C2 |
| Коленчато-рычажный напорный механизм с канатным приводом для экскаваторов-лопат | 1961 |
|
SU143729A1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 1972 |
|
SU427206A1 |
| US20020007727, 24.01.2002. | |||

