Предлагаемое изобретение относится к управляемым приводам для преобразования энергии управления в механическую энергию перемещения рабочего органа и может быть использовано в машиностроении, робототехнике, медицине при создании гидравлических и пневматических приводов, работающих от воздействия газа или жидкости.
Наиболее эффективно применение устройства в торообразных приводах, в которых торовая гибкая нерастяжимая герметичная оболочка соединена с подвижным рабочим органом.
Известен камерный привод (см. патент №2012535 МПК В66В 9/04, B66F 3/24 «Пневматический подъемник»). Устройство включает находящуюся под давлением камеру, расположенную в корпусе, соединенную с тяговый элемент в виде гибких лент. На камеру создают внешнее силовое воздействие гибкой лентой, последовательно проходящей через центральное отверстие тора и охватывающей его наружную часть. Использование камеры позволяет уменьшить величину трения в сопрягаемых подвижных элементах путем устранения трения скольжения.
Однако данное устройство обладает низким быстродействием, надежностью и безопасностью работы, на которые оказывает негативное влияние большой объем рабочей среды, заполняющий полость камеры, которая требуется для реализации заданных параметров: хода рабочего органа и создаваемого на нем тягового усилия. Длина камеры зависит от хода рабочего органа. Тяговое усилие привода определяется произведением величин давления рабочей среды на эффективную площадь торцевых поверхностей камеры.
Известны камерные пневмоприводы (см. А.С. №1121132 «Рука манипулятора», МПК B25J 3/00, опубл. 30.10.84, Бюл. №40, А.С. №1364462 «Рука манипулятора», МПК B25J 3/00, опубл. 07.01.88, Бюл. №1). В приводах камера, находящаяся под постоянным давлением рабочей среды внутри нее, выполнена в виде торообразной герметичной оболочки и установлена в корпусе пневмоцилиндра, охватывая шток. На камеру с внешней торцевой стороны создают распределенное силовое воздействие пневматическим давлением, приводящим к перемещению штока относительно корпуса. Величину силового воздействия регулируют величиной давления снаружи камеры.
Данные устройства расширяют возможность увеличения силового воздействия на рабочий орган использованием распределенной нагрузки. Однако создание давления рабочей среды снаружи торообразной камеры требует использования дополнительной рабочей камеры и ее герметизации, что усложняет их работу. Регулируется привод только величиной давления рабочей среды, что ограничивает его функциональные возможности. Кроме этого устройства имеют низкое быстродействие, надежность и безопасность работы, связанные с негативным влиянием большого объема рабочей среды в полости камеры.
Известно устройство камерного привода (см. патент №2372056 «Искусственная мышца», МПК B25J 17/02, A61F 2/72, опубл. 10.11.2009, «Гибкие приводы в робототехнике / Е.Г. Колесникова, Е.А. Савинская, В.И. Умнов. Национальный исследовательский Иркутский государственный технический университет). Данные приводы получили название «Мышца Маккибена». В них используется нерастяжимая гибкая камера торообразной формы, охватывающая растяжимый шток. Величиной давления рабочей среды внутри камеры получают силовое воздействие, растягивающее шток, создавая усилие, соответствующее нагрузке. Применение устройства не позволяет получить значительных перемещений рабочего органа, а упругие деформации штока негативно влияют на эффективность его работы. Управление привода осуществляется только изменением величины давления рабочей среды в камере, что ограничивает его функциональные возможности. Недостатком привода является низкое быстродействие, особенно при использовании пневматического источника питания, а также сложность обеспечения надежности безопасности работы, связанной с возможностью разрыва камеры в процессе функционирования.
Наиболее близким по технической сущности из известных является камерный привод (см. патент РФ №2586379, МПК B25J 13/00, F01B 19/00, F04B 43/00, Сысоев С.Н., опубл. 10.06.2016 г., Бюл. №16), включающий торообразную герметичную гибкую нерастяжимую оболочку, образующую камеру с кольцеобразными торцевыми поверхностями, охватывающую шток.
Управляют направлением перемещения и величиной хода штока путем изменения эффективной площади по меньшей мере одной кольцеобразной торцевой поверхности камеры.
Данное устройство расширяет функциональные возможности камерных приводов путем регулирования эффективной площади торцевых поверхностей камеры. Однако необходимость повышения тягового усилия, а также хода рабочего органа требует увеличения давления рабочей среды, полностью заполняющего камеру, что снижает его быстродействие и безопасность функционирования.
Процесс функционирования привода сопровождается выворачиванием оболочки, приводящим к изменению объема камеры и уменьшению величины давления рабочей среды, что негативно влияет на быстродействие привода. Кроме этого, к снижению давления рабочей среды в камере приводят возможные утечки рабочей среды, что также негативно влияет на реализацию требуемых характеристик, особенно в безнасосных приводах.
Таким образом, данное устройство и все известные имеют низкое быстродействие и безопасность функционирования.
Задачей изобретения является повышение быстродействия и безопасности функционирования за счет уменьшения объема пространства в камере, заполненного рабочей средой под давлением.
Поставленная задача достигается тем, что камерный привод, содержит корпус, выполненный с возможностью изменения формы, шток, гибкую нерастяжимую торообразную оболочку, установленную в корпусе и на штоке и образующие герметичную камеру, заполненную рабочей средой с избыточным давлением, при этом в камере установлена торовая вставка, образующая герметичную камеру, заполненную рабочей средой с давлением, превышающим давление в упомянутой камере оболочки, причем упомянутая оболочка установлена с возможностью выворачивания и перемещения штока, а вставка выполнена с возможностью соединения с камерой оболочки.
Возможностью соединения камер вставки и оболочки реализуется функция ресивера.
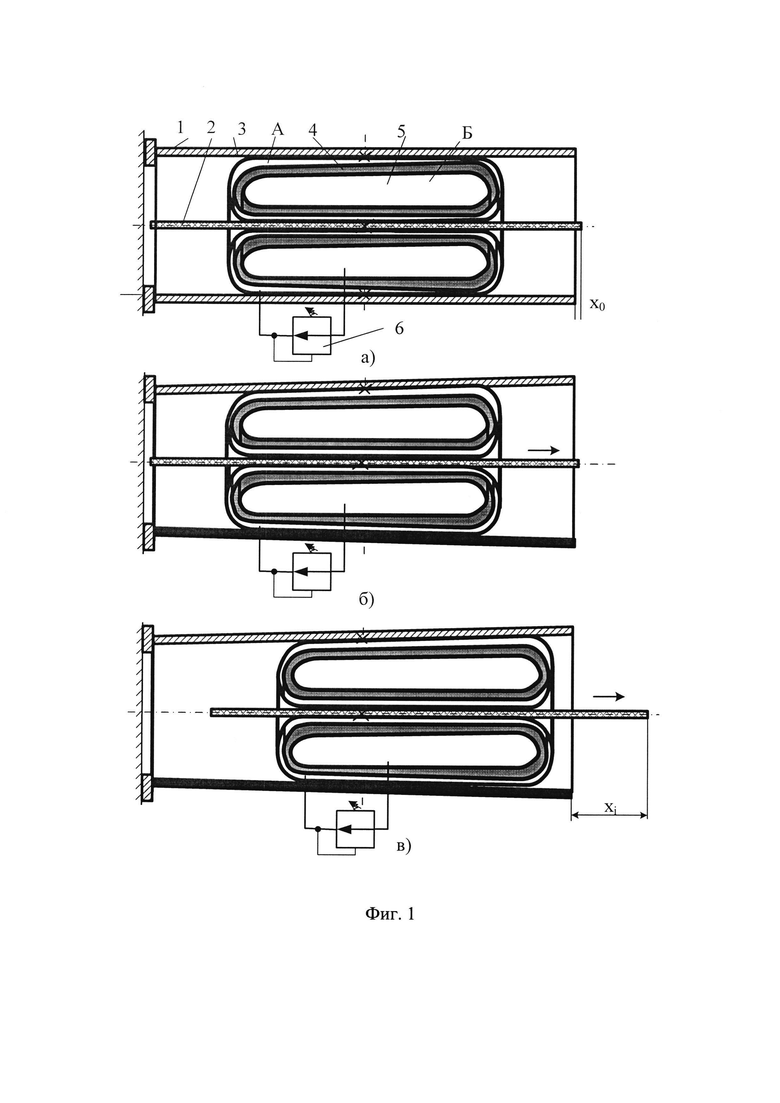
Пример предлагаемого устройства представлен на чертеже, где показаны схемы его реализации.
В приводе (фиг. 1, а) в корпусе 1 и на штоке 2 закреплена торообразная оболочка 3, образующая герметичную полость А, заполненную рабочей средой с избыточным давлением р1. Величина данного давления рабочей среды рассчитывается по прочностным характеристикам оболочки. В полости А установлена торовая герметичная вставка 4, имеющая герметичную полость 5, образующая камеру Б, заполненную рабочей средой с давлением р2, превышающим p1. Камеры А и Б соединены между собой через редукционный клапан 6. Исходное положение штока относительно корпуса 1 соответствует Х0.
Устройство работает следующим образом.
Изменяют форму корпуса (фиг. 1, б), создавая конусность относительно средней его части. Это приводит к изменению формы оболочки 3. Правая ее торцевая часть становится больше левой. От воздействия давления p1 на эффективную площадь возникает силовое воздействие на шток, направленное вправо. Оболочка 3 выворачивается (фиг. 1, б), перемещая шток на величину Xi.
Безопасность работы привода для нештатной ситуации разрыва оболочки 3 повышается за счет уменьшения величины произведения давления p1 на объем камеры А, так как объем существенно уменьшается. Уменьшение объема рабочей среды в камере А повышает быстродействие, особенно пневматического привода. В случае уменьшения давления в камере А при возникновении утечек или в процессе его функционирования, открывается клапан 6, рабочая среда поступает из полости Б в полость А, стабилизируя величину заданного давления.
Таким образом, предлагаемое устройство повышает быстродействие и безопасность функционирования за счет уменьшения объема пространства в рабочей камере и стабилизации в ней заданной величины давления рабочей среды. Кроме этого устройство позволяет создавать более мощные безопасные камерные приводы, торовые движители.
Моделирование, макетирование, проведенные натурные исследования предлагаемого устройства подтвердили его работоспособность, эффективность и промышленную применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА КАМЕРНОГО ПРИВОДА | 2014 |
|
RU2586379C1 |
| Стартовое устройство | 2022 |
|
RU2787533C1 |
| Стартовое устройство | 2022 |
|
RU2801754C1 |
| Катапульта | 2024 |
|
RU2821807C1 |
| Катапульта для взлета летательного аппарата | 2022 |
|
RU2789905C1 |
| Сильфонный привод криволинейного перемещения | 2022 |
|
RU2785181C1 |
| Вакуумный захватный агрегатный модуль | 2019 |
|
RU2703771C1 |
| Стартовое устройство | 2021 |
|
RU2771300C1 |
| Мембранный привод | 2017 |
|
RU2668307C1 |
| Захватный корректирующий модуль | 2017 |
|
RU2668241C1 |
Предлагаемое изобретение относится к управляемым приводам для преобразования энергии управления в механическую энергию перемещения рабочего органа и может быть использовано в машиностроении, робототехнике, медицине при создании гидравлических и пневматических приводов, работающих от воздействия газа или жидкости. Камерный привод содержит корпус, выполненный с возможностью изменения формы, шток, гибкую нерастяжимую торообразную оболочку, установленную в корпусе и на штоке и образующую герметичную камеру, заполненную рабочей средой с избыточным давлением. При этом в камере установлена торовая вставка, образующая герметичную камеру, заполненную рабочей средой с давлением, превышающим давление в упомянутой камере оболочки. Причем упомянутая оболочка установлена с возможностью выворачивания и перемещения штока, а вставка выполнена с возможностью соединения с камерой оболочки. Изобретение обеспечивает повышение быстродействия и безопасность функционирования за счет уменьшения объема пространства в рабочей камере и стабилизации в ней заданной величины давления рабочей среды. 1 ил.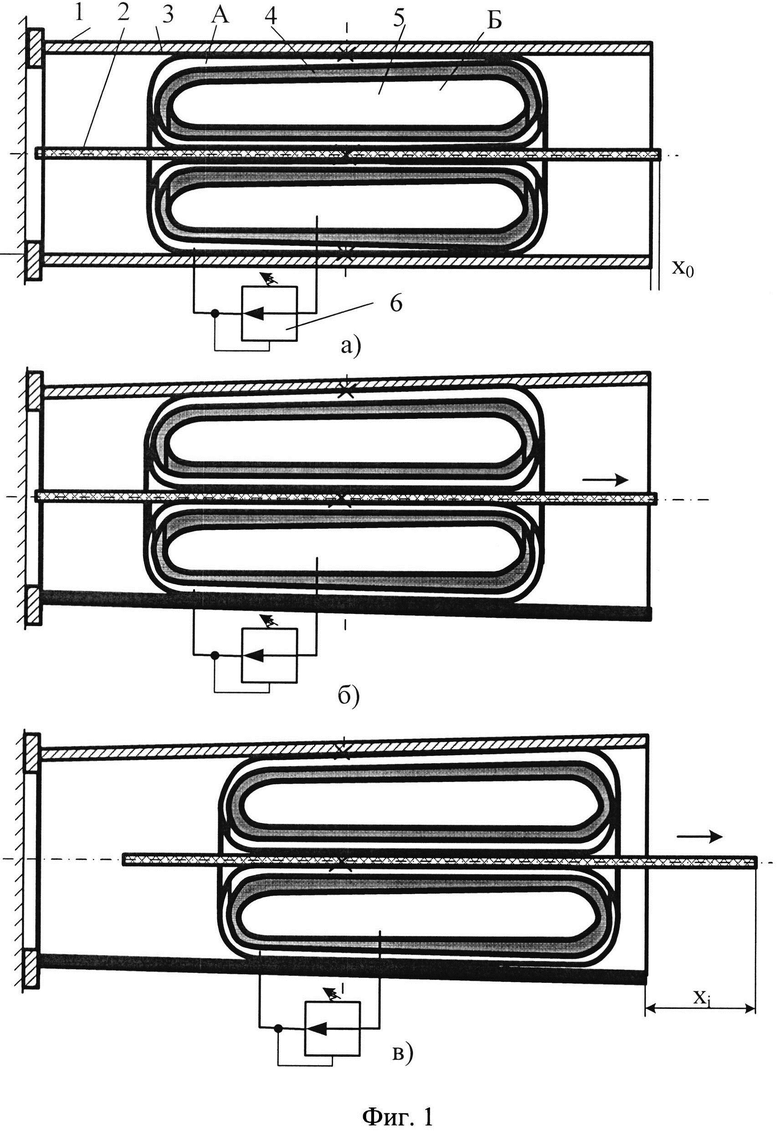
Камерный привод, содержащий корпус, выполненный с возможностью изменения формы, шток, гибкую нерастяжимую торообразную оболочку, установленную в корпусе и на штоке и образующую герметичную камеру, заполненную рабочей средой с избыточным давлением, при этом в камере установлена торовая вставка, образующая герметичную камеру, заполненную рабочей средой с давлением, превышающим давление в упомянутой камере оболочки, причем упомянутая оболочка установлена с возможностью выворачивания и перемещения штока, а вставка выполнена с возможностью соединения с камерой оболочки.
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ШТОКА КАМЕРНОГО ПРИВОДА | 2014 |
|
RU2586379C1 |
| Рука манипулятора | 1986 |
|
SU1364462A2 |
| CN 201423654 Y, 17.03.2010 | |||
| Устройство для изготовления изделий из термопластичных материалов гибкой | 1988 |
|
SU1669747A1 |

