Область техники, к которой относится изобретение
Настоящее изобретение относится к системе для усовершенствованного управления специальными световыми сигналами транспортного средства.
Уровень техники
В ситуациях, таких как полицейская погоня и движение к месту происшествия, когда оперативное транспортное средство, например, полицейская машина, машина скорой помощи, пожарная машина и т.д., едет с включенными специальными сигналами, свет от проблесковых маячков или аналогичных устройств, установленных на крыше и заднем окне, направлен назад от оперативного транспортного средства. При движении нескольких оперативных транспортных средств к месту происшествия, например, друг за другом, водители транспортных средств, идущих сзади, которые участвуют в погоне или едут к месту происшествия, могут быть ослеплены ярким светом от впереди едущего транспортного средства и (или) других транспортных средств перед транспортным средством, едущим сзади, в частности, такой яркий свет может мешать им при выполнении сложных и (или) резких маневров. Яркий мигающий свет от впереди едущего транспортного средства или транспортных средств может привести к задержке и (или) неспособности водителя, ослепленного таким светом, управлять транспортным средством.
Раскрытие изобретения
Предложена система усовершенствованного управления специальными световыми сигналами, которая включает в себя компьютер с процессором и запоминающим устройством, размещаемый в первом транспортном средстве и запрограммированный для:
сбора данных, относящихся к преследованию второго транспортного средства;
использования собранных данных для определения действия первого транспортного средства и/или действия второго транспортного средства, и
управления специальным световым сигналом в первом транспортном средстве на основании по крайней мере одного определенного действия.
Собранные данные могут включать в себя положение и/или скорость, и/или ускорение, и/или замедление, и/или поворот первого транспортного средства.
Собранные данные могут включать в себя положение и/или скорость, и/или ускорение, и/или замедление, и/или поворот второго транспортного средства.
Собранные данные могут включать в себя данные от ультразвукового датчика и/или от датчика изображений, и/или от радиолокационного датчика, и/или от лидарного датчика, и/или системы глобального позиционирования (GPS), и/или от инфракрасного датчика.
Собранные данные могут включать в себя данные от контроллера системы рулевого управления и/или от контроллера тормозной системы, и/или от контроллера двигателя, и/или от контроллера коробки передач.
Свет специального сигнала в первом транспортном средстве может быть направлен в сторону задней части первого транспортного средства.
Компьютер дополнительно может быть запрограммирован для обнаружения перевода переключателя режима погони в рабочее положение до выполнения управления специальным световым сигналом в первом транспортном средстве на основании по крайней мере одного определенного действия.
Управление специальным световым сигналом в первом транспортном средстве может осуществляться в соответствии с сообщением, переданным по шине локальной сети контроллеров (CAN) в первом транспортном средстве.
Управление специальным световым сигналом в первом транспортном средстве может осуществляться в соответствии с сообщением, переданным по дискретной сети.
Компьютер дополнительно может быть запрограммирован для выдачи звукового оповещения об определенном действии.
Предложен способ усовершенствованного управления специальными световыми сигналами с помощью компьютера первого транспортного средства, включающий в себя:
сбор данных, относящихся к преследованию второго транспортного средства;
использование собранных данных для определения действия первого транспортного средства и/или действия второго транспортного средства;
управление специальным световым сигналом в первом транспортном средстве на основании по крайней мере одного определенного действия.
Способ может дополнительно включать в себя обнаружение перевода переключателя режима погони в рабочее положение до выполнения управления специальным световым сигналом в первом транспортном средстве на основании по крайней мере одного определенного действия.
Способ также может включать в себя выдачу звукового оповещения об определенном действии.
Краткое описание чертежей
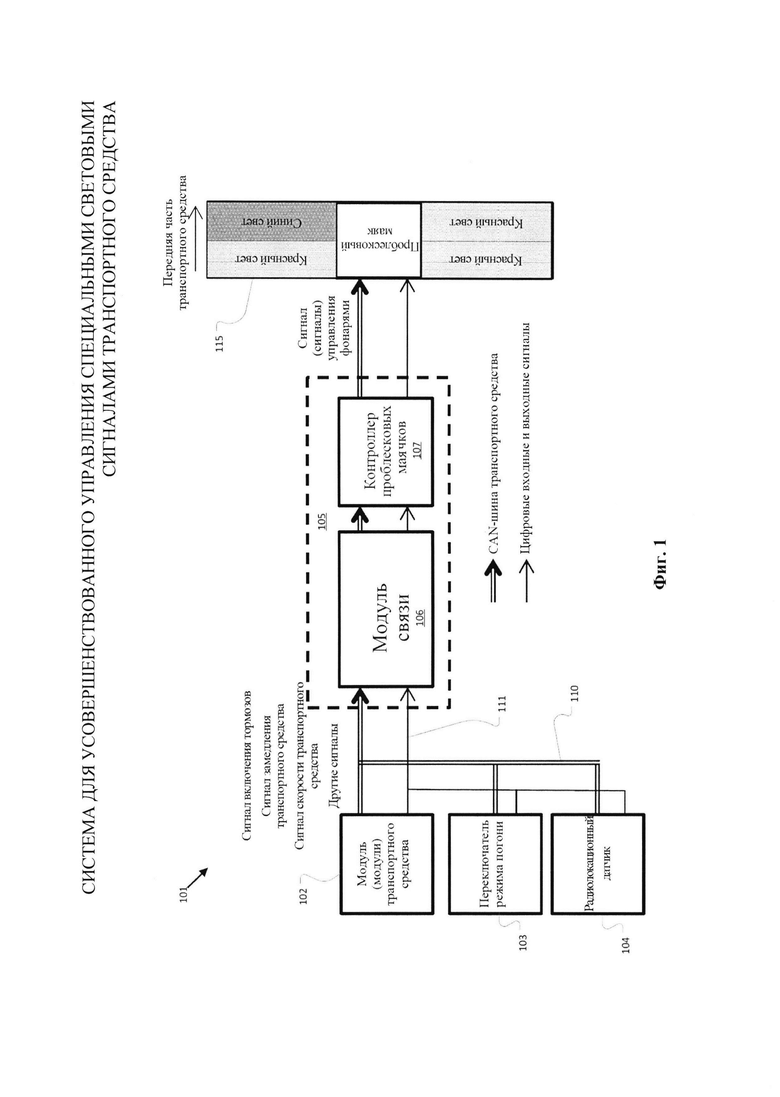
На фиг. 1 представлена схема примера транспортного средства, оборудованного системой отслеживания подозреваемого.
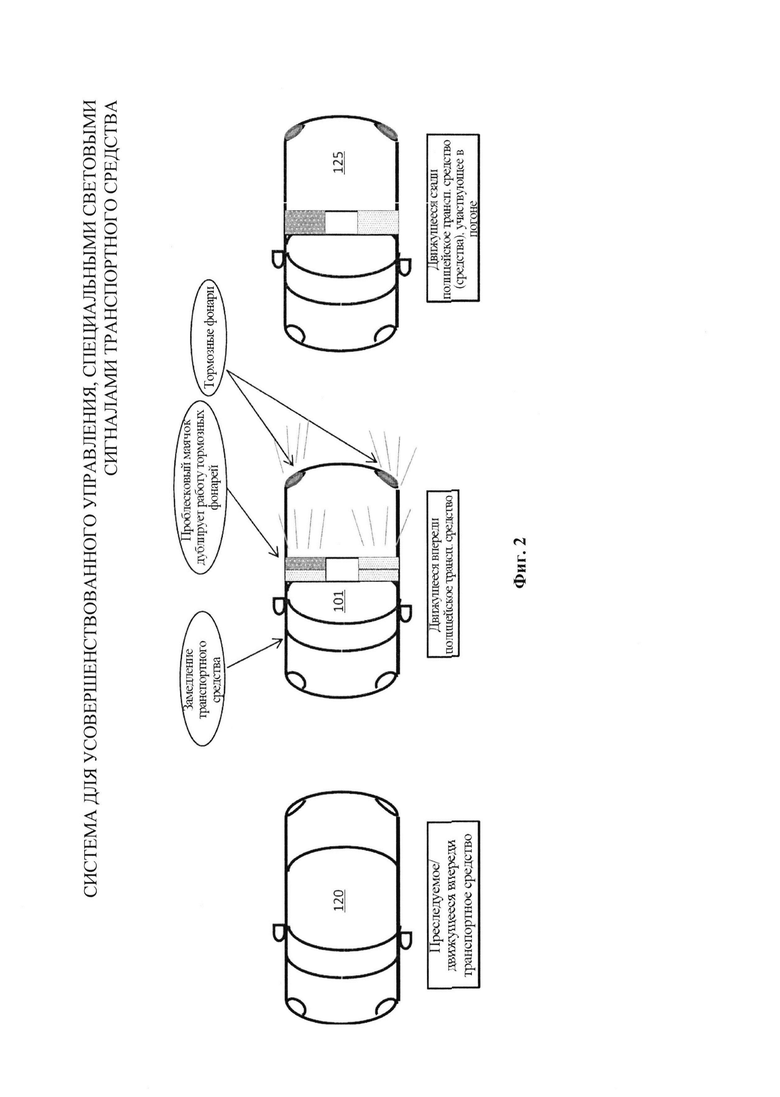
На фиг. 2 представлена схема примера первого оперативного транспортного средства, за которым движется второе оперативное транспортное средство, во время преследования подозреваемого транспортного средства.
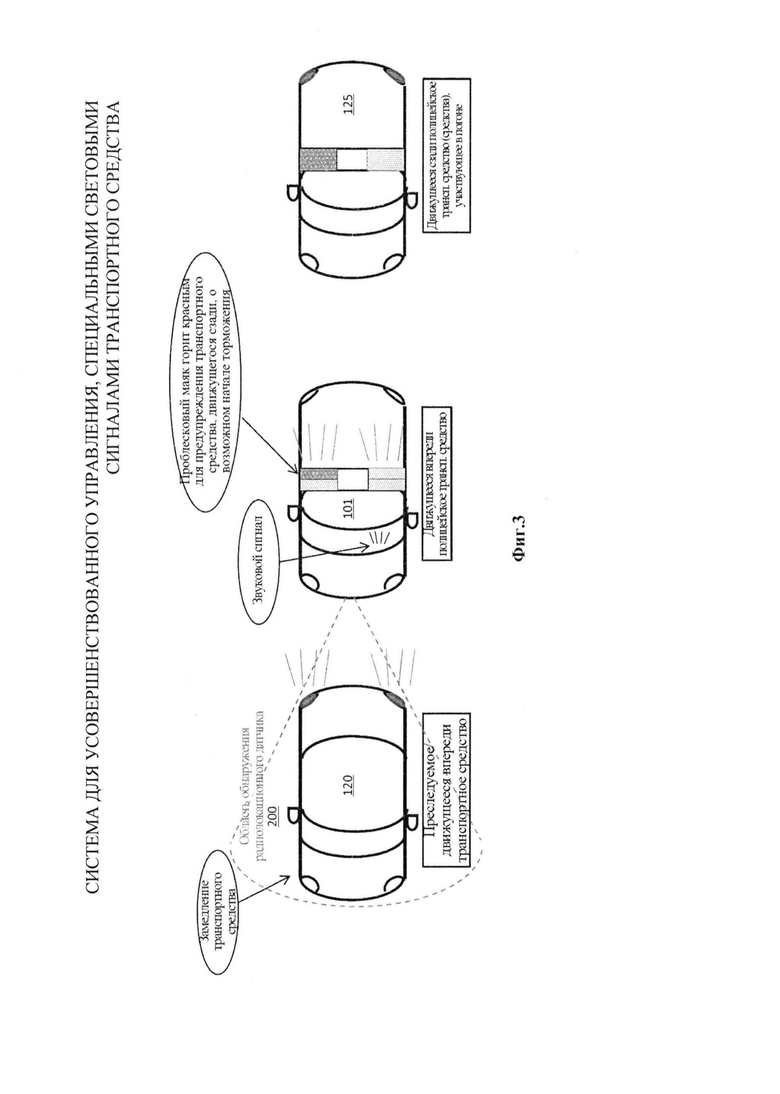
На фиг. 3 представлена другая схема примера первого оперативного транспортного средства, за которым движется второе оперативное транспортное средство, во время преследования подозреваемого транспортного средства.
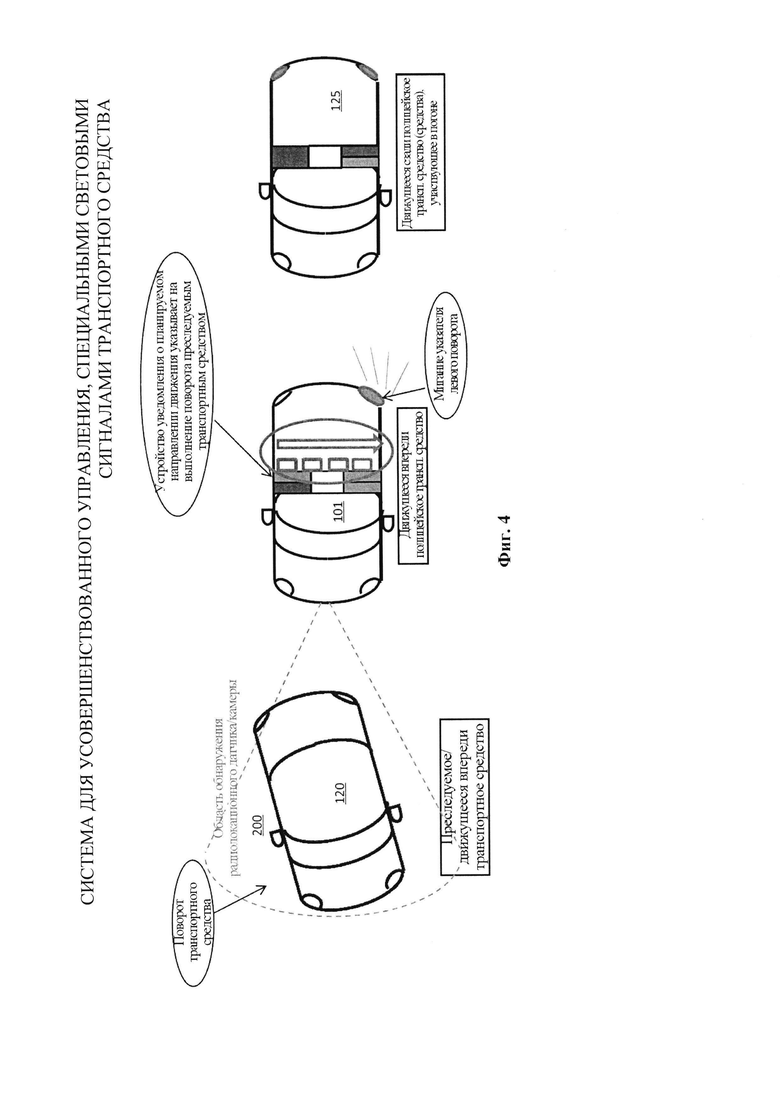
На фиг. 4 представлена еще одна схема примера первого оперативного транспортного средства, за которым движется второе оперативное транспортное средство, во время преследования подозреваемого транспортного средства.
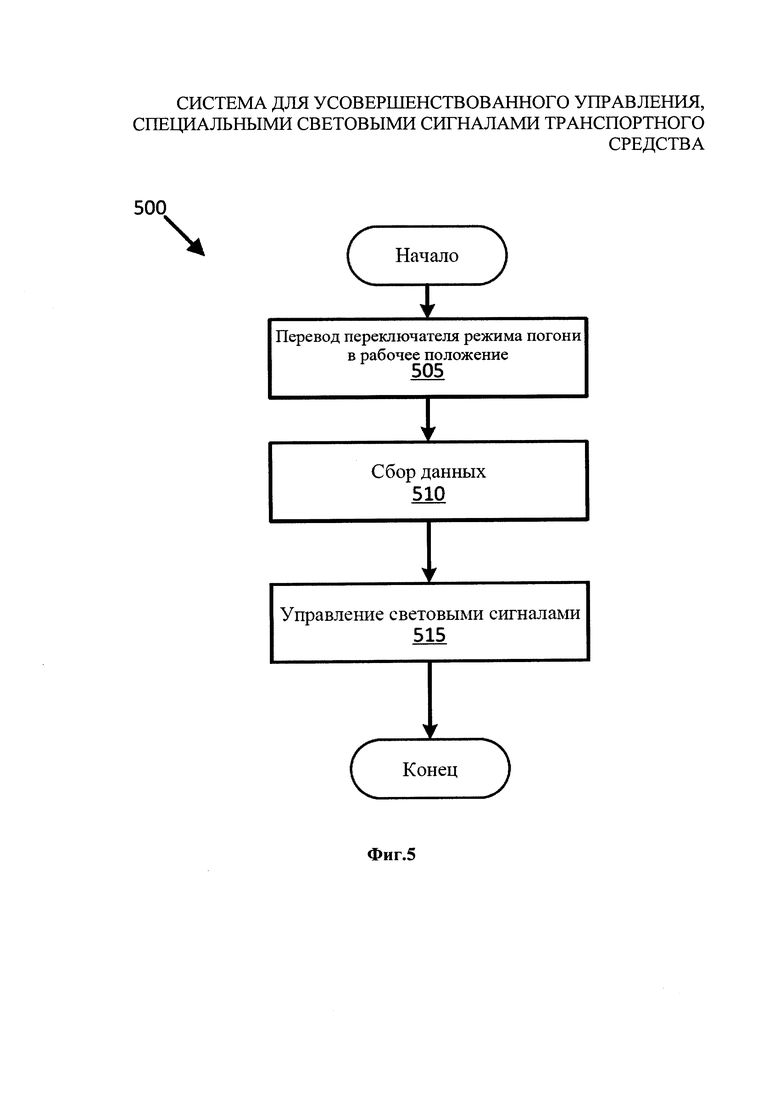
На фиг. 5 представлена блок-схема примера способа управления световыми сигналами специального транспортного средства.
Осуществление изобретения
На фиг. 2 представлена схема, на которой за первым оперативным транспортным средством 101 движется второе оперативное транспортное средство 125, во время преследования подозреваемого транспортного средства 120. В соответствии с настоящим описанием, в частности, со ссылкой на фиг. 1, первое (впереди идущее) оперативное транспортное средство 101 включает в себя контроллер 105 специальных световых сигналов, выполненный с возможностью управлять работой специальных световых сигналов (проблесковых маячков) 115 транспортного средства 101, например, для выдачи команды использования определенных схем подачи световых и/или звуковых сигналов и/или низкочастотных звуков, сообщающих одному или нескольким транспортным средствам 125, следующим сзади, о планируемых действиях впереди идущего транспортного средства 101 во время погони, движении к месту происшествия для сигнала поддержки и (или) любой другой помощи со стороны ближайших транспортных средств при выполнении резких маневров. Например, переключатель 103 режима погони в транспортном средстве 101 может быть переведен в рабочее положение, после чего может быть выполнено уменьшение мощности света 115, направленного назад от впереди едущего транспортного средства 101, и (или) может быть включена схема мигающих сигналов, позволяющая уменьшить помехи для водителей, едущих сзади, и (или) передать информацию о планируемых действиях впереди едущего транспортного средства 101 водителям транспортных средств 125, идущих сзади. В настоящем описании раскрыты системы и способы объединения оборудования полицейского/оперативного транспортного средства такого как контроллер 105 специальных сигналов и переключатель 103 режима погони, со стандартными компонентами транспортного средства такими как модули 102 и радиолокационный датчик 104.
На фиг. 1 показано, что по CAN-шине (шине локальной сети контроллеров) 110 транспортного средства 101 или ее аналогу, и (или) по дискретной (цифровой) сети 111 передачи данных может передаваться информация для контроллера 105 специальных световых сигналов, который может включать в себя модуль 106 связи и контроллер 107 проблесковых маячков. Модули, которые могут передавать данные по CAN-шине 110 и (или) цифровой сети передачи данных 111, включают в себя переключатель 103 режима погони, радиолокационный датчик 104 и (или) другие модули 102 транспортного средства 101. Выходные сигналы датчика 104 транспортного средства 101, сообщения CAN-шины 110 и (или) любые выходные сигналы 111 транспортного средства, содержащие различные данные, включая, но, не ограничиваясь этим, значение скорости транспортного средства 101, состояние тормозной системы, значение угла поворота рулевого колеса и т.д., могут использоваться самим контроллером 105 специальных световых сигналов и (или) передаваться через шлюзовой интерфейс, обеспеченный модулем 106 связи, между системами транспортного средства 101 и контроллером 105, в том числе, контроллером 107 проблесковых маячков. Соответственно, такое оборудование транспортного средства 101, как проблесковый маячок 115, может управляться на основании условий работы, информация о которых содержится в сообщениях, передаваемых по CAN-шине 110 транспортного средства 101, и (или) в цифровых сообщениях 111, что позволяет улучшить оповещение ближайших транспортных средств 125 о планируемых или выполняемых маневрах оперативного транспортного средства.
В общем случае контроллер 105 специальных сигналов может временно отключать и (или) изменять режим (схему) работы мигающих сигналов, свет от которых направлен в определенную сторону, а также может выдавать, например, на транспортное средство (средства), идущее сзади, уведомление о некоторых маневрах, планируемых и (или) выполняемых идущим впереди транспортным средством 101 во время агрессивных условий движения, например, во время погони. Кроме того, контроллер 105 специальных сигналов может обеспечивать дополнительную индикацию о маневрах транспортного средства 101 во время неагрессивных условий движения, включая, но, не ограничиваясь этим, использование задней части специальных сигналов 115 на фонаре (фонарях), направленном назад, для дублирования и (или) повторения функции тормозных фонарей (стоп-сигналов) транспортного средства 101 и (или) использование устройства уведомления о планируемом направлении движения или аналогичной системы, которая может дублировать и (или) обеспечивать повторение функций указателей поворота транспортного средства 101. На сопроводительных чертежах видно, что для выдачи предупреждения и (или) сообщений для объектов, находящихся вокруг транспортного средства 101, во время работы специальных сигналов 115 может использоваться один или несколько цветов.
Более того, радиолокационная система (системы) 104 транспортного средства 101 может определять направление и (или) изменение направления движения преследуемого транспортного средства 120 и может выдавать сообщение/сигнал на контроллер 105 для временного отключения специальных мигающих световых сигналов 115 транспортного средства 101, направленных назад, и (или) для включения режима работы специальных сигналов в соответствии с определенной схемой, указывающей направление поворота во время погони для транспортных средств 125, идущих сзади. После выполнения поворота этот компонент указания поворота может быть отключен, а затем может быть возобновлено использование первоначальной схемы работы специальных мигающих световых сигналов. Как было сказано выше, также может быть предусмотрена выдача звуковых и (или) низкочастотных сигналов о планируемых маневрах впереди едущего транспортного средства 101.
Как было сказано выше, транспортное средство 101 включает в себя контроллер 105 специальных сигналов, который, в частности, может являться частью или может быть соединен с вычислительным устройством транспортного средства 101. Транспортное средство 101 представляет собой наземное транспортное средство с тремя или более колесами, например, пассажирский автомобиль, легкий грузовой автомобиль, тяжелый грузовой автомобиль, включая пожарную машину, и т.д. Компьютер, например, который включает в себя контроллер 105 специальных световых сигналов, как правило, имеет процессор и запоминающее устройство, при этом запоминающее устройство включает в себя один или несколько типов машиночитаемых носителей и хранит инструкции, исполняемые процессором, для выполнения различных операций, включая операции, раскрытые в данном описании изобретения. Такой компьютер может включать в себя или быть соединен с несколькими вычислительными устройствами, например, контроллерами или их аналогами, установленными в транспортном средстве 101 и предназначенными для контроля и (или) управления различными компонентами транспортного средства, например, блоком управления двигателем, блоком управления коробкой передач и т.д. Компьютер 105, как правило, выполнен с возможностью обмена данными с помощью шины 110 локальной сети контроллеров (CAN) или ее аналога. Компьютер 105 также может быть соединен с системой бортовой диагностики (OBD-II) и (или) другими механизмами 111 цифровой связи.
С помощью CAN-шины 110, OBD-II и (или) других проводных или беспроводных систем компьютер 105 может передавать сообщения, например, за счет изменения цветов, схем мигания световых сигналов и других параметров одного или нескольких фонарей системы 115 специальных световых сигналов, на различные устройства в транспортном средстве и (или) получать сообщения от различных устройств, например, от контроллеров, исполнительных механизмов, датчиков и т.д., включая, но не ограничиваясь этим, модули 102, переключатель 103 режима погони и (или) радиолокационный датчик 104. В качестве альтернативы или дополнения в случае, когда компьютер включает в себя несколько устройств, включая контроллер 105 специальных световых сигналов, для обмена данными между этими устройствами можно использовать CAN-шину или ее аналог. Кроме того, компьютер транспортного средства может быть выполнен с возможностью обмена данными с другими устройствами с помощью различных проводных и (или) беспроводных сетевых протоколов, например, сотовой связи, Bluetooth, универсальной последовательной шины (USB), проводных и (или) беспроводных сетей с коммутацией пакетов и т.д.
На фиг. 2 представлен пример, в соответствии с которым сообщение, передаваемое по CAN-шине 110 транспортного средства 101, или сигнал 111, указывающий на торможение транспортного средства и (или) на достижение заранее заданного уровня давления в тормозной системе, может быть считан шлюзовым модулем 106 связи и передан на контроллер 107 проблесковых маячков транспортного средства 101 и (или) считан непосредственно контроллером 107 для предписания фонарям проблесковых маячков 115, направленным назад дублировать функцию тормозных фонарей транспортного средства 101, например, при уровне выходного сигнала/уровне мощности, равном уровню, который используется при движении к месту происшествия, или сниженному уровню мощности/яркости. Как было сказано выше, также могут быть использованы звуковые и (или) низкочастотные сигналы.
На фиг. 3 показано, что направленное вперед радиолокационное устройство 104, или другой механизм, например, направленная вперед камера (датчик изображения) или лидарный датчик, можно использовать для обнаружения замедления преследуемого транспортного средства 120, например, транспортное средство 101 может определять, что скорость замедления равна или превышает заранее заданное пороговое значение для транспортного средства 120, и может выдавать сигнал 111 или сообщение по CAN-шине 110, считываемое шлюзовым/интерфейсным модулем 106 и доступное для контроллера 107 проблесковых маячков и (или) считываемое непосредственно контроллером 107 проблесковых маячков, который после этого может выдать команду включения режима работы фонарей проблескового маячка 115, направленных назад, фонарей, установленных на заднем окне, или любых других специальных световых сигналов, направленных назад, например, в соответствии с определенной схемой и (или) яркостью и (или) другим выходным параметром, который в дополнение к тормозным фонарям транспортного средства 101 будет указывать на торможение транспортного средства 101, что позволит водителям транспортных средств 125, участвующих в погоне/идущих сзади, быстрее реагировать на маневры транспортного средства 101, например, на резкие маневры. Схема подачи световых сигналов может быть применена, когда тормоза впереди идущего транспортного средства 101 не использованы. Как было сказано выше, также могут быть использованы звуковые и (или) низкочастотные сигналы.
На фиг. 4 показано, что направленное вперед радиолокационное устройство 104 или другой механизм, например, направленная вперед камера или лидарный датчик, который может быть включен в модули 102, можно использовать для обнаружения поперечного перемещения преследуемого транспортного средства 120, например, для определения направления поворота (влево или вправо) транспортного средства 120, находящегося впереди, после чего контроллер 105 специальных световых сигналов может выдать команду включения фонарей проблесковых маячков 115, направленных назад, фонарей, установленных на заднем окне, и (или) устройства уведомления о планируемом направлении движения в соответствии со схемой мигания, указывающей направление поворота для транспортных средств, идущих сзади, что позволит водителям транспортных средств 125, едущих сзади, быстрее реагировать на условия движения, например, на резкие маневры.
Модули 102 транспортного средства 101 могут принимать данные от различных устройств, например, от датчиков, в том числе, от одного или нескольких ультразвуковых датчиков, камер, лазерных локаторов, радиолокационных датчиков, инфракрасных датчиков и т.д. Кроме того, вышеуказанные примеры не должны рассматриваться как ограничения; на компьютер транспортного средства, включая контроллер 105 специальных сигналов и (или) другие контроллеры транспортного средства 101, от модулей 102, например, от контроллеров системы рулевого управления, тормозной системы, коробки передач, двигателя и т.д., также могут поступать другие данные, в частности, по CAN-шине 110 могут передаваться данные о скорости, ускорении транспортного средства 101 и т.д. Кроме того, в транспортном средстве 101 могут быть установлены датчики или аналогичные устройства, оборудование системы глобального позиционирования (GPS) и т.д., выполненные с возможностью выдавать данные непосредственно на вычислительные устройства транспортного средства 101, например, через проводное или беспроводное соединение.
Вычислительные устройства транспортного средства 101 включают в себя запоминающее устройство, на котором хранятся данные, полученные в соответствии с приведенным выше описанием. Такие данные могут представлять собой различные полученные данные о транспортном средстве 101. К измеряемым параметрам можно отнести положение, скорость движения и размеры (например, длину, ширину, высоту, эффективную площадь отражения) цели (целей), например, транспортного средства 125, находящегося в пределах или рядом с областью 200 обнаружения. Данные 115 также могут включать в себя вычисленные с их помощью данные, хранящиеся в компьютере, например, в контроллере 105 и (или) на другом компьютере транспортного средства 101.
Транспортное средство 101 обычно включает в себя человеко-машинный интерфейс. Обычно человеко-машинный интерфейс выполнен с возможностью принимать входные сигналы для одного или нескольких компьютеров транспортного средства 101, например, контроллера 105, и (или) выдавать выходные сигналы от него. Например, транспортное средство 101 может включать в себя один или несколько дисплеев, которые могут быть использованы в качестве графического интерфейса пользователя (GUI) или его аналога, системы интерактивного голосового взаимодействия (IVR) и (или) одного или нескольких звуковых устройств выдачи данных и т.д.
На фиг. 5 представлена блок-схема примера способа 500 управления световыми сигналами специального транспортного средства 101. Способ 500 начинается на этапе 505, на котором переключатель 103 режима погони транспортного средства 101 переводится в рабочее положение. Как было сказано выше, рабочее положение переключателя 103 режима погони может указывать на то, что транспортное средство 101 преследует транспортное средство 120. В общем случае рабочее положение переключателя 103 режима погони запускает работу контроллера 105 специальных сигналов, например, в соответствии с описанием, приведенным выше. Кроме того, для начала работы контроллера 105 может потребоваться дополнительный входной сигнал, например, входной сигнал от водителя или пассажира транспортного средства 101 о наличии специальных транспортных средств 125, идущих сзади, сигнал обнаружения оперативных транспортных средств, идущих сзади, который передается по каналу связи между транспортными средствами, данные от датчика, описанные выше, или любые другие данные.
На этапе 510 контроллер 105 собирает данные о транспортном средстве 101 и (или) работе транспортного средства 120, например, как было описано выше, при этом ускорение, замедление, поворот транспортного средства 120 и т.д. могут быть определены так же, как и для транспортного средства 101.
На этапе 515 контроллер 105 специальных световых сигналов управляет работой фонарей транспортного средства 101, например, в проблесковых маячках 115, работой фонарей, установленных на заднем окне, и (или) других фонарей, используемых при движении к месту происшествия, на основании данных, собранных на этапе 510. Как было сказано выше, может быть дополнительно использован звуковой выходной сигнал.
Способ 500 завершается после этапа 515, например, на основании входного сигнала, принятого при помощи переключателя 103 режима погони или любого другого механизма, при остановке или выключении транспортного средства 101 и т.д.
В качестве дополнения или альтернативы для описанных выше примеров операций в приложении А также описано несколько вариантов операций и (или) объект изобретения.
В данном контексте термин «полиция» относится не только к обычному полицейскому участку, но и к различным государственным и (или) частным правоохранительным органам и (или) их действиям по обеспечению безопасности.
В общем случае вычислительные устройства, аналогичные тем, что были рассмотрены в настоящем описании, например, контроллер 105, могут содержать инструкции, выполняемые одним или несколькими вычислительными устройствами, аналогичными тем, что были рассмотрены в настоящем описании, для осуществления этапов или операций вышеуказанных способов. Например, рассмотренные выше этапы способа могут быть реализованы в виде машиночитаемых инструкций.
Машиночитаемые инструкции могут быть скомпилированы или транслированы из компьютерных программ, созданных с использованием различных языков и (или) технологий программирования, включая, но не ограничиваясь этим, языки Java, С, С++, Visual Basic, Java Script, Perl, HTML и т.д. или их комбинации. В общем случае процессор (например, микропроцессор) принимает инструкции, например, от запоминающего устройства, машиночитаемого носителя и т.д., и выполняет эти инструкции, тем самым, реализуя один или несколько процессов, к которым относится один или несколько процессов из настоящего описания. Такие инструкции и другие данные могут храниться и передаваться с помощью различных машиночитаемых носителей. Файл в вычислительном устройстве обычно представляет собой набор данных, хранящихся на машиночитаемом носителе, например, на носителе данных, в оперативном запоминающем устройстве и т.д.
Машиночитаемый носитель может представлять собой любой носитель, предоставляющий данные (например, инструкции), которые могут быть считаны компьютером. Такой носитель может иметь множество форм, включая, но не ограничиваясь этим, постоянные запоминающие устройства, оперативные запоминающие устройства и т.д. Постоянными запоминающими устройствами могут быть, например, оптические или магнитные диски, а также другие виды энергонезависимых носителей. Оперативные запоминающие устройства могут представлять собой, например, динамическое оперативное запоминающее устройство (DRAM), которые обычно являются частью основным запоминающим устройством. Стандартными формами машиночитаемых носителей являются гибкий магнитный диск, жесткий диск, магнитная лента, любые другие виды магнитных носителей, CD-ROM, DVD, любые другие оптические носители, перфорированная лента, бумажная лента, любые другие физические носители информации с отверстиями, RAM, PROM, EPROM, FLASH-EEPROM, другие чипы или карты памяти, а также любые другие носители, с которыми может работать компьютер.
На чертежах одинаковые элементы обозначены одинаковыми ссылочными позициями. Также некоторые или все элементы могут быть изменены. Что касается описанных в данном документе носителей, способов, систем, способов и т.д., следует понимать, что, несмотря на обозначенную последовательность этапов, такие способы могут быть выполнены с использованием другой последовательности данных этапов. Также следует понимать, что некоторые этапы могут быть выполнены одновременно, а некоторые этапы могут быть добавлены или исключены. Другими словами, описания процессов представлены лишь в качестве примера вариантов осуществления изобретения и не могут рассматриваться как ограничение формулы изобретения.
Таким образом, следует понимать, что описание приведено выше в целях наглядности, а не ограничения. Многие варианты осуществления и способы применения, отличные от указанных примеров, станут очевидными после ознакомления с вышеприведенным описанием. Объем изобретения должен определяться не на основании приведенного выше описания, а на основании прилагаемой формулы изобретения вместе со всеми эквивалентами, указанными в данной формуле изобретения. Можно предположить и ожидать будущего развития технологий, упомянутых в данном описании изобретения, а также того, что раскрытые системы и способы будут включены в подобные будущие варианты осуществления изобретения. Таким образом, следует понимать, что применение изобретения может быть изменено и скорректировано и что оно ограничивается только формулой изобретения.
Все термины, используемые в формуле изобретения, следует понимать в их наиболее широких разумных толкованиях и их обычных значениях, как это понимают специалисты в области техники, если иное явно не указано в описании изобретения. В частности, использование слов «какой-либо», «данный», «вышеуказанный» и т.д. надо понимать как один или несколько указанных элементов, если в формуле изобретения не указано иное.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ПРЕДУПРЕЖДЕНИЯ О ПРИБЛИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2687395C2 |
| ТАКТИЛЬНЫЙ ВЫВОД В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2703680C1 |
| УЛУЧШЕННОЕ ПРЕДОТВРАЩЕНИЕ СТОЛКНОВЕНИЙ | 2015 |
|
RU2708534C2 |
| МОБИЛЬНОЕ ОБНАРУЖЕНИЕ ОРУЖЕЙНОГО ВЫСТРЕЛА | 2014 |
|
RU2679338C2 |
| СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОЙ ОЧИСТКИ ОКОН ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2651508C2 |
| СПОСОБ ОБУЧЕНИЯ И КОНТРОЛЯ ВОЖДЕНИЯ БЕЗРЕЛЬСОВЫХ ТРАНСПОРТНЫХ СРЕДСТВ НА УЧЕБНО-ТРЕНИРОВОЧНОМ АВТОДРОМЕ, УЧЕБНОЕ БЕЗРЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СИСТЕМА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2003 |
|
RU2240600C1 |
| КОНТРОЛЛЕР ДЛЯ АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ КОНТРОЛЯ ПОЛОСЫ АВТОНОМНЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2015 |
|
RU2705885C1 |
| ИЗБЕГАНИЕ УДАРА В ДНИЩЕ КУЗОВА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2707485C2 |
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2706859C2 |
| СИСТЕМА И СПОСОБ РЕГУЛИРОВКИ МОМЕНТА ЗАЖИГАНИЯ В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2677017C2 |
Группа изобретений относится к световым сигналам транспортного средства. Система управления специальными световыми сигналами транспортного средства включает в себя компьютер, размещаемый в первом транспортном средстве. Компьютер содержит процессор и запоминающее устройство. Компьютер запрограммирован для сбора данных, относящихся к преследованию второго транспортного средства, использования собранных данных для распознавания поворота одного из первого транспортного средства и второго транспортного средства, и управления специальным световым сигналом в первом транспортном средстве на основании одного определенного поворота. Достигается усовершенствование управления специальными световыми сигналами транспортного средства. 2 н. и 18 з.п. ф-лы, 5 ил.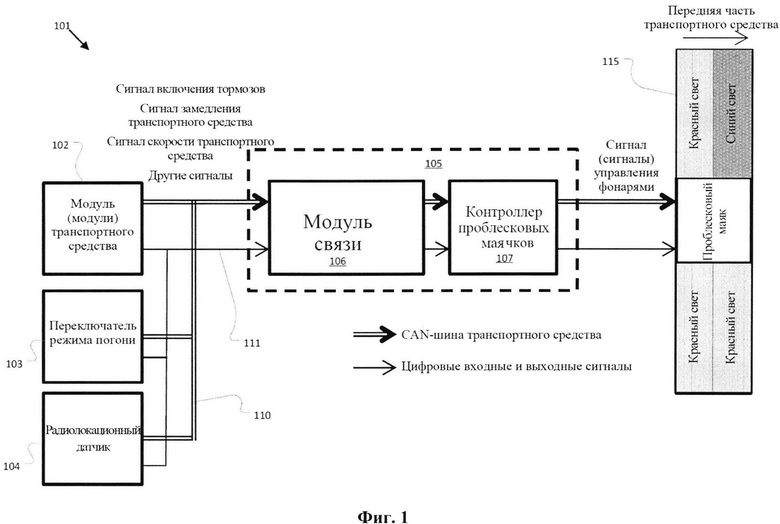
1. Система для усовершенствованного управления специальными световыми сигналами транспортного средства, которая включает в себя компьютер, размещаемый в первом транспортном средстве, причем компьютер содержит процессор и запоминающее устройство, при этом компьютер запрограммирован для:
сбора данных, относящихся к преследованию второго транспортного средства;
использования собранных данных для распознавания поворота по меньшей мере одного из первого транспортного средства и второго транспортного средства и
управления специальным световым сигналом в первом транспортном средстве на основании по меньшей мере одного определенного поворота.
2. Система по п. 1, в которой собранные данные включают в себя по меньшей мере одно из положения, скорости, ускорения, замедления и поворота первого транспортного средства.
3. Система по п. 1, в которой собранные данные включают в себя по меньшей мере одно из положения, скорости, ускорения, замедления и поворота второго транспортного средства.
4. Система по п. 1, в которой собранные данные включают в себя по меньшей мере одни из данных от ультразвукового датчика, данных от датчика изображений, данных от радиолокационного датчика, данных от лидарного датчика, данных от системы глобального позиционирования (GPS) и данных от инфракрасного датчика.
5. Система по п. 1, в которой собранные данные включают в себя данные от по меньшей мере одного из контроллера системы рулевого управления, контроллера тормозной системы, контроллера двигателя и контроллера коробки передач.
6. Система по п. 1, в которой свет специального сигнала в первом транспортном средстве направлен в сторону задней части первого транспортного средства.
7. Система по п, 1, в которой компьютер дополнительно запрограммирован для обнаружения перевода переключателя режима погони в рабочее положение до выполнения управления специальным световым сигналом в первом транспортном средстве на основании по меньшей мере одного определенного действия.
8. Система по п. 1, в которой управление специальным световым сигналом первого транспортного средства осуществляется в соответствии с сообщением, переданным по шине локальной сети контроллеров (CAN) в первом транспортном средстве.
9. Система по п. 1, в которой управление специальным световым сигналом в первом транспортном средстве осуществляется в соответствии с сообщением, переданным по дискретной сети.
10. Система по п. 1, в которой компьютер дополнительно запрограммирован для выдачи звукового оповещения об определенном действии.
11. Способ усовершенствованного управления специальными световыми сигналами транспортного средства, содержащий этапы, на которых в компьютере транспортного средства:
собирают данные, относящиеся к преследованию второго транспортного средства;
используют собранные данные для распознавания поворота по меньшей мере одного из первого транспортного средства и второго транспортного средства и
управляют специальным световым сигналом в первом транспортном средстве на основании по меньшей мере одного определенного действия.
12. Способ по п. 11, в котором собранные данные включают в себя по меньшей мере одно из положения, скорости, ускорения, замедления и поворота первого транспортного средства.
13. Способ по п. 11, в котором собранные данные включают в себя по меньшей мере одно из положения, скорости, ускорения, замедления и поворота второго транспортного средства.
14. Способ по п. 11, в котором собранные данные включают в себя по меньшей мере одни из данных от ультразвукового датчика, данных от датчика изображений, данных от радиолокационного датчика, данных от лидарного датчика, данных от системы глобального позиционирования (GPS) и данных от инфракрасного датчика.
15. Способ по п. 11, в которой собранные данные включают в себя данные от по меньшей мере одного из контроллера системы рулевого управления, контроллера тормозной системы, контроллера двигателя и контроллера коробки передач.
16. Способ по п. 11, в которой свет специального сигнала в первом транспортном средстве направлен в сторону задней части первого транспортного средства.
17. Способ по п. 11, дополнительно содержащий этап, на котором обнаруживают перевод переключателя режима погони в рабочее положение до выполнения управления специальным световым сигналом в первом транспортном средстве на основании по меньшей мере одного определенного действия.
18. Способ по п. 11, в котором управление специальным световым сигналом первого транспортного средства осуществляется в соответствии с сообщением, переданным по шине локальной сети контроллеров (CAN) в первом транспортном средстве.
19. Способ по п. 11, в котором управление специальным световым сигналом в первом транспортном средстве осуществляется в соответствии с сообщением, переданным по дискретной сети.
20. Способ по п. 11, дополнительно содержащий этап, на котором выдают звуковое оповещение об определенном действии.
| US 6121896 A, 19.09.2000 | |||
| US 6679702 B1, 20.01.2004 | |||
| DE 102006019495 А1, 31.10.2007 | |||
| DE 102006036458 A1, 07.02.2008. |

