ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к области автомобильных электронных систем, в частности к способу и контроллеру для приведения в соответствие датчика давления в шине и шины, и автомобилю.
УРОВЕНЬ ТЕХНИКИ
Со стремительным развитием автомобильной электронной технологии, сознательное отношение пользователей к безопасности дорожного движения постоянно возрастает, а датчики давления в шинах автомобилей также применяются все шире. В известном уровне техники, приведение в соответствие датчиков давления в шинах выполняется вручную: Единственный радиочастотный инструмент, используется работником, для приближения к шинам с целью приведения положений шин в соответствие с соответствующими датчиками давления в шинах, при этом, в каждом случае, четыре шины приводятся в соответствие с четырьмя датчиками давления в шинах, вследствие чего процесс является обременительным.
US 2014/0176324 A1 описывает модуль определения давления в шинах, который просто идентифицирует положение модуля определения шины для автоматического назначения положения модуля определения шины и систему определения давления в шинах, включающую в себя упомянутый модуль. Модуль определения давления в шинах включает в себя датчик фазового угла, определяющий фазовый угол колеса, датчик определения давления, определяющий давление и температуру шины, управляющий блок определения давления, извлекающий номер фазового угла, приводящегося в соответствие с фазовым углом колеса, который определяется датчиком фазового угла среди множества номеров фазового угла, которые присваиваются посредством равномерного разделения колеса, и передающая часть определения давления, передающая информацию о шине, включающую в себя значение давления или значение температуры, несколько раз определяемое датчиком определения давления через интервал повторной передачи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения заключается в том, чтобы предложить способ приведения в соответствие датчика давления в шине и шины, для упрощения процесса приведения в соответствие датчика давления в шине и положения шины и улучшения эффективности приведения в соответствие; еще одна цель настоящего изобретения заключается в том, чтобы предложить контроллер для приведения в соответствие датчика давления в шине и шины; и еще одна цель настоящего изобретения заключается в том, чтобы предложить автомобиль, включающий в себя вышеупомянутый контроллер для приведения в соответствие датчика давления в шине и шины.
Для решения вышеупомянутых технических задач, настоящим изобретением предлагается способ для приведения в соответствие датчика давления в шине и шины, содержащий:
шаг S101: получение идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN N устройствами получения значения расстояния соответственно, при этом значение расстояния aj относится к расстоянию от датчика давления в шине до j-го устройства получения значения расстояния, 1≤ j ≤N, и N - целое число, составляющее не менее 2;
шаг S102: определение положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN; и
шаг S103: приведение положения в соответствие с идентификатором.
В частном случае, устройство получения значения расстояния представляет собой радиочастотную антенну; и шаг S101 содержит:
шаг S1011: активация N радиочастотных антенн соответственно;
шаг S1012: управление N радиочастотными антеннами для отправки запроса на определение значения расстояния и идентификатора датчику давления в шине соответственно, и соответственно прием идентификатора и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN, отправляемого датчиком давления в шине в соответствии с соответствующим запросом на определение давления и идентификатора; и
шаг S1013: получение идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN от N радиочастотных антенн соответственно.
В частном случае, до шага S1011, способ далее содержит:
прием сигнала активации антенны, отправляемого триггерным датчиком дверной ручки.
В частном случае реализации, радиочастотная антенна является радиочастотной антенной системы пассивного доступа/пассивного пуска PEPS.
В частном случае, после шага S102, способ далее содержит:
Шаг S102': определение того, приводится ли в соответствие датчик давления в шине впервые, в случае если датчик давления в шине приводится в соответствие впервые, переход к шагу S103, и в случае если датчик давления в шине не приводится в соответствие впервые, переход к шагу S104;
Шаг S104: определение того, является ли положение аналогичным первоначальному положению, записанному в датчике давления в шине, в случае если положение является аналогичным первоначальному положению, записанному в датчике давления в шине, переход к шагу S105, и в случае если положение отличается от первоначального положения, записанного в датчике давления в шине, переход к шагу S103; и
Шаг S105: завершение приведения в соответствие.
Для решения вышеупомянутых технических проблем, настоящим изобретением далее предлагается контроллер для приведения датчика давления в шине в соответствие с шиной, содержащий:
блок получения параметра, предназначенный для получения идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN N устройствами получения значения расстояния, при этом значение расстояния aj обозначает расстояние от датчика давления в шине до j-го устройства получения значения расстояния, 1≤j≤N, и N - целое число, составляющее не менее 2;
блок определения, предназначенный для определения положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN; и
блок определения, предназначенный для приведения положения в соответствие с идентификатором.
В частном случае, блок получения параметра, содержащий:
блок активации антенны, предназначенный для активации N радиочастотных антенн соответственно;
промежуточный блок получения базового параметра, предназначенный для управления N радиочастотными антеннами для отправки запроса на определение значения расстояния и идентификатора датчику давления в шине соответственно, и соответственно приема идентификатора и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN, отправляемого датчиком давления в шине в соответствии с запросом на определение значения расстояния и идентификатора, при этом значение расстояния aj относится к расстоянию от датчика давления в шине до j-ой радиочастотной антенны, 1≤j≤N, и N - целое число не менее двух 2;
первый блок получения параметра, предназначенный для получения идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN от N радиочастотных антенн соответственно.
второй блок получения параметра, предназначенный для расчета положения датчика давления в шине в соответствии с идентификатором датчика давления в шине и значением расстояния a1, значением расстояния a2 … значением расстоянием aj до значения расстояния aN, получаемым от N радиочастотных антенн соответственно.
В частном случае, контроллер представляет собой контроллер системы PEPS, и радиочастотная антенна представляет собой радиочастотную антенну системы PEPS; а контроллер приведения в соответствие далее содержит:
блок приема сигнала активации, предназначенный для приема сигнала активации антенны, отправляемого триггерным (имеющим два состояния) датчиком дверной ручки.
В частном случае, контроллер далее содержит: модуль первичного определения, модуль вторичного определения и блок завершения;
модуль первичного определения используется для определения, приводится ли в соответствие датчик давления в шине впервые, в случае если датчик давления в шине приводится в соответствие впервые, инициации блока приведения в соответствие для приведения положения в соответствие с идентификатором, и в случае если датчик давления в шине не приводится в соответствие впервые, инициации модуля вторичного определения для определения, является ли положение аналогичным первоначальному положению, записанному в датчике давления в шине;
модуль вторичного определения используется для определения, является ли положение аналогичным первоначальному положению, записанному в датчике давления в шине, в случае если положение является аналогичным первоначальному положению, записанному в датчике давления в шине, инициирования блока завершения для завершения приведения в соответствие, и в случае если положение отличается от первоначального положения, записанного в датчике давления в шине, инициирования блока приведения в соответствие для приведения положения в соответствие с идентификатором; и
блок завершения используется для завершения приведения в соответствие.
Для решения вышеупомянутых технических задач, настоящим изобретением далее предлагается автомобиль, включающий в себя контроллер для приведения в соответствие датчика давления в шине и шины, предлагаемый настоящим изобретением.
Настоящим изобретением предлагается способ, контроллер для приведения в соответствие датчика давления в шине и шины, и автомобиль. Способ содержит: получение идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN N устройствами получения значения расстояния соответственно; определение положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN; и приведения положения в соответствие с идентификатором. Таким образом, в настоящем изобретении, датчик давления в шине приводится в соответствие с положением шины устройствами получения значения расстояния для упрощения процесса приведения в соответствие датчика давления в шине и положения шины и повышения эффективности приведения в соответствие.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для более ясного пояснения технических решений в вариантах осуществления настоящего изобретения далее приводится краткое введение к сопроводительным чертежам, необходимым в описании известного уровня техники или вариантов осуществления. Очевидно, что сопроводительные чертежи в описании, приведенном ниже, являются лишь некоторыми из вариантов осуществления настоящего изобретения, на основании которых средними специалистами в данной области техники могут быть получены другие чертежи без приложения каких-либо творческих усилий.
Фиг. 1 - блок-схема способа приведения в соответствие датчика давления в шине и шины, предлагаемого настоящим изобретением;
Фиг. 2 - блок-схема способа приведения в соответствие датчика давления в шине и шины, предлагаемого настоящим изобретением;
Фиг. 3 - схематическая структурная схема контроллера для приведения в соответствие датчика давления в шине и шины, предлагаемого настоящим изобретением;
Фиг. 4 - схематическая структурная схема контроллера для приведения в соответствие датчика давления в шине и шины, предлагаемого настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Настоящим изобретением предлагается способ приведения в соответствие датчика давления в шине и шины посредством использования устройств получения значения расстояния для упрощения процесса приведения в соответствие датчика давления в шине и положения шины и улучшения эффективности приведения в соответствие; еще одна цель настоящего изобретения заключается в том, чтобы предложить контроллер для приведения в соответствие датчика давления в шине и шины; и еще одна цель настоящего изобретения заключается в том, чтобы предложить автомобиль, включающий в себя вышеупомянутый контроллер для приведения в соответствие датчика давления в шине и шины.
Для пояснения целей, технических решений и преимуществ настоящего изобретения, ниже приводится ясное и полное описание технических решений в настоящем изобретении в сочетании с сопроводительными чертежами. Очевидно, что описываемые варианты осуществления являются лишь частью вариантов осуществления настоящего изобретения, а не всеми вариантами осуществления настоящего изобретения. Все другие варианты осуществления, полученные средними специалистами в данной области техники на основе вариантов осуществления настоящего изобретения без приложения творческих усилий, подпадают под объем правовой охраны настоящего изобретения.
Первый вариант осуществления
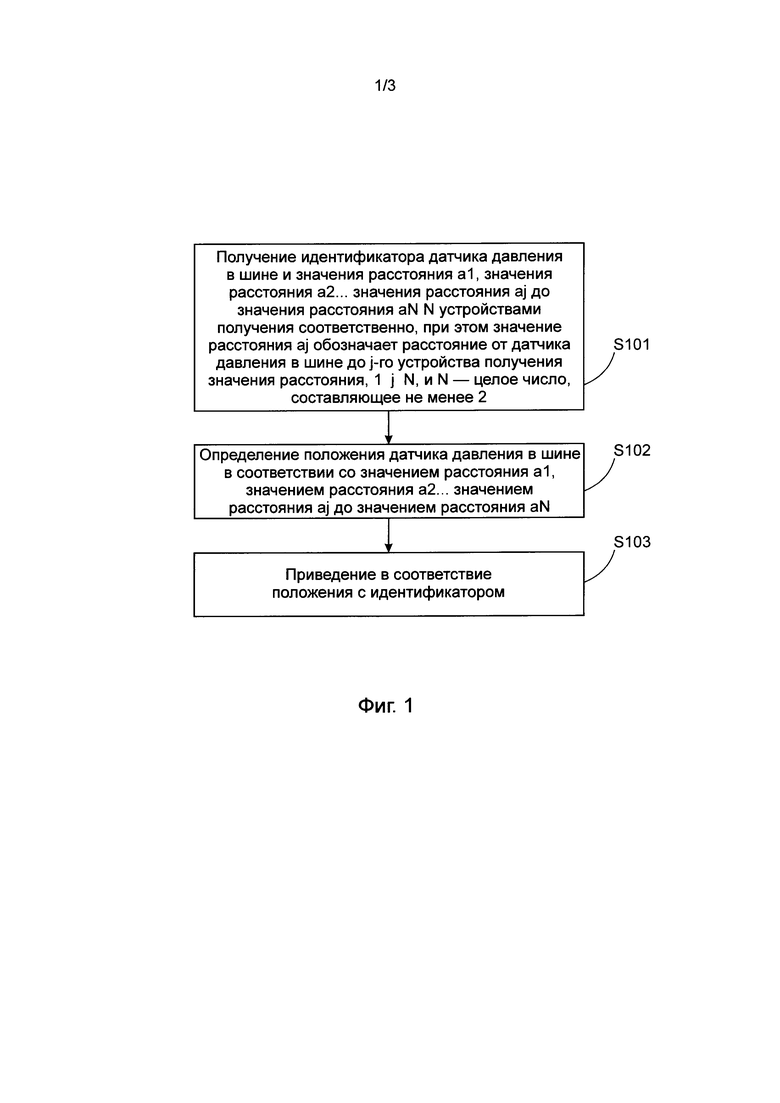
См. фиг. 1. Фиг. 1 - блок-схема способа приведения в соответствие датчика давления в шине и шины, предлагаемого настоящим изобретением. Способ содержит:
шаг S101: получение идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN N устройствами получения значения расстояния соответственно, при этом значение расстояния aj относится к расстоянию от датчика давления в шине до j-го устройства получения значения расстояния, 1≤j≤N, и N - целое число, составляющее не менее 2.
Можно понять, что настоящее изобретение подходит для различных шин автомобиля и датчиков давления в шинах, установленных на шинах. Идентификатор датчика давления в шине и соответствующие значения расстояний получаются соответствующими устройствами получения значения расстояния. Так как идентификатор датчика давления в шине является уникальным, то для датчика давления в шине, идентификатор, получаемый соответствующими; устройствами получения значения расстояния, является одинаковым, но значения расстояний не являются одинаковыми.
шаг S102: определение положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN.
В частном случае, здесь N может составлять 4. Конечно, N может составлять другие числовые значения, и это не ограничивается особым образом в настоящем изобретении.
Шаг S103: приведение положения в соответствие с идентификатором.
Можно понять, что упомянутое приведение в соответствие положения с идентификатором здесь обозначает запись положения в память датчика давления в шине.
Настоящим изобретением предлагается способ, контроллер для приведения в соответствие датчика давления в шине и шины, и автомобиль. Способ включает в себя: получение идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN N устройствами получения значения расстояния соответственно; определение положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN; и приведение положения в соответствие с идентификатором. Таким образом, в настоящем изобретении датчик давления в шине приводится в соответствие с положением шины устройствами получения значения расстояния для упрощения процесса приведения в соответствие датчика давления в шине и положения шины и повышения эффективности приведения в соответствие.
Второй вариант осуществления
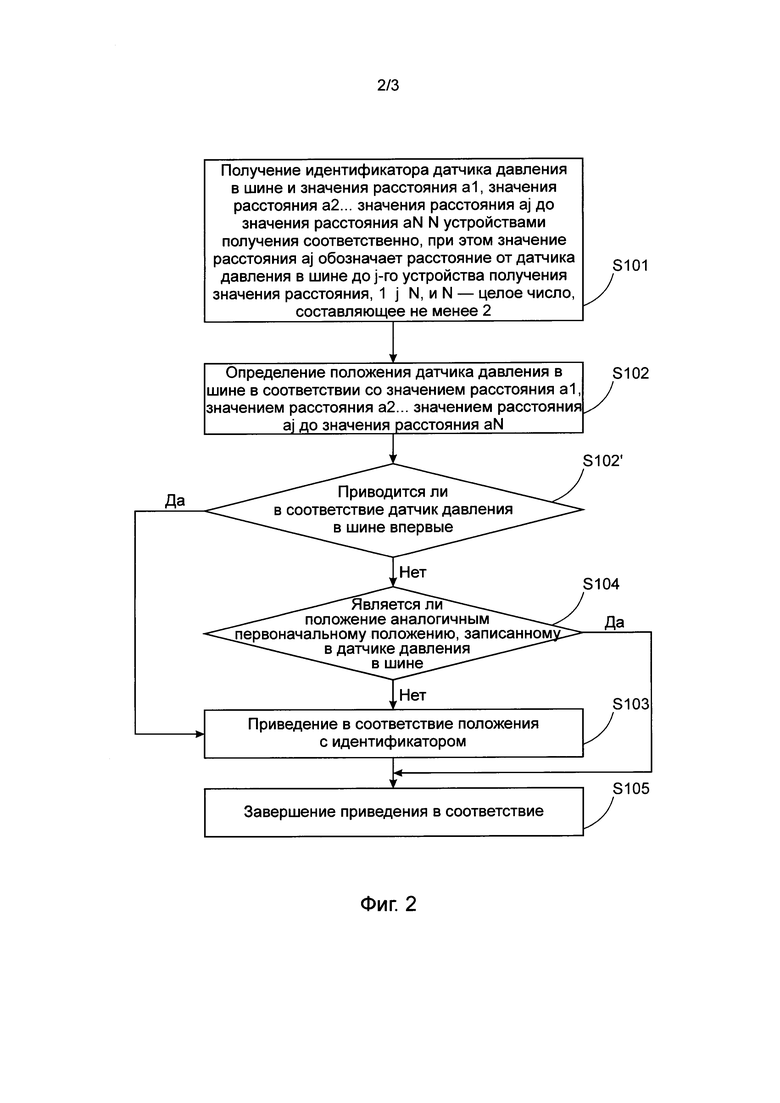
Настоящим изобретением далее предлагается способ приведения в соответствие датчика давления в шине и шины, показанный на фиг. 2. Способ содержит вышеупомянутый шаг S101 - шаг S102 в первом варианте осуществления, и после шага S102, способ также может содержать следующие шаги:
Шаг S102': определение того, приводится ли в соответствие датчик давления в шине впервые, если так, то переход к шагу S103, и в ином случае, переход к шагу S104;
Шаг S104: определение того, является ли положение аналогичным первоначальному положению, записанному в датчике давления в шине, если так, то переход к шагу S105, и в ином случае, переход к шагу S103; и
Шаг S105: завершение приведения в соответствие.
При этом, способ для определения, приводится в ли соответствие датчик давления в шине впервые, заключается в следующем: определение, хранится ли какая-либо информация о положении в датчике давления в шине, если так, то это указывает на то, что датчик давления в шине не приводится в соответствие впервые, и, в ином случае, это указывает на то, что датчик давления в шине приводится в соответствие впервые.
Можно понять, что когда датчик давления в шине не приводится в соответствие впервые, способ далее содержит: повторное определение, является ли полученное положение датчика давления в шине аналогичным первоначальному положению, записанному в памяти датчика давления в шине. В случае, когда полученное положение датчика давления в шине является аналогичным первоначальному положению, записанному в памяти датчика давления в шине, это указывает на то, что датчик давления в шине более не требует приведения в соответствие, и, в ином случае, полученное положение записывается в датчик давления в шине для замены первоначального положения.
Можно понять, что так как автомобиль имеет четыре шины, в практическом применении, шаг S101 - шаг S105 соответственно выполняются для каждой шины.
Очень легко прийти к пониманию того, что пока шина не является дефектной шиной, настоящее раскрытие изобретения не относится к исправным шинам, для которых и сохраняется первоначальный идентификатор и положение.
По этой причине настоящим изобретением далее предлагается способ приведения в соответствие датчика давления в шине и шины, содержащий: получение идентификатора и положения датчика давления в шине; определение, приводится ли в соответствие датчик давления в шине впервые; если так, то приведение в соответствие положения с идентификатором, и в ином случае, определение того, является ли положение аналогичным первоначальному положению, записанному в датчике давления в шине, если так, то завершение приведения в соответствие, и в ином случае, приведение положения в соответствие с идентификатором. Поэтому в процессе приведения в соответствие датчика давления в шине и положения шины, осуществляется приведение в соответствие только дефектных шин, таким образом процесс является простым, и эффективность приведения в соответствие повышается.
В частном случае, устройство получения значения расстояния представляет собой радиочастотную антенну, и шаг S101 содержит:
шаг S1011: активация N радиочастотных антенн соответственно;
шаг S1012: управление N радиочастотными антеннами для отправки запроса на определение значения расстояния и идентификатора датчику давления в шине соответственно, и соответственно прием идентификатора и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN, отправляемого датчиком давления в шине в соответствии с запросом на определение давления и идентификатора соответственно; и
шаг S1013: получение идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN от N радиочастотных антенн соответственно.
Конечно, здесь устройство получения значения расстояния может также представлять собой другие устройства, это не ограничивается в настоящем изобретении особым образом, при условии того, что устройство получения значения расстояния может получать значение расстояния между собой и датчиком давления в шине.
В частном случае, до шага S1011, способ далее содержит:
прием сигнала активации антенны, отправляемого триггерным датчиком дверной ручки.
Можно понять, что сначала должен сработать датчик дверной ручки, а затем датчик дверной ручки отправит сигнал активации антенны контроллеру, таким образом позволяя контроллеру активировать радиочастотные антенны.
В частном случае, радиочастотная антенна представляет собой радиочастотную антенну системы PEPS.
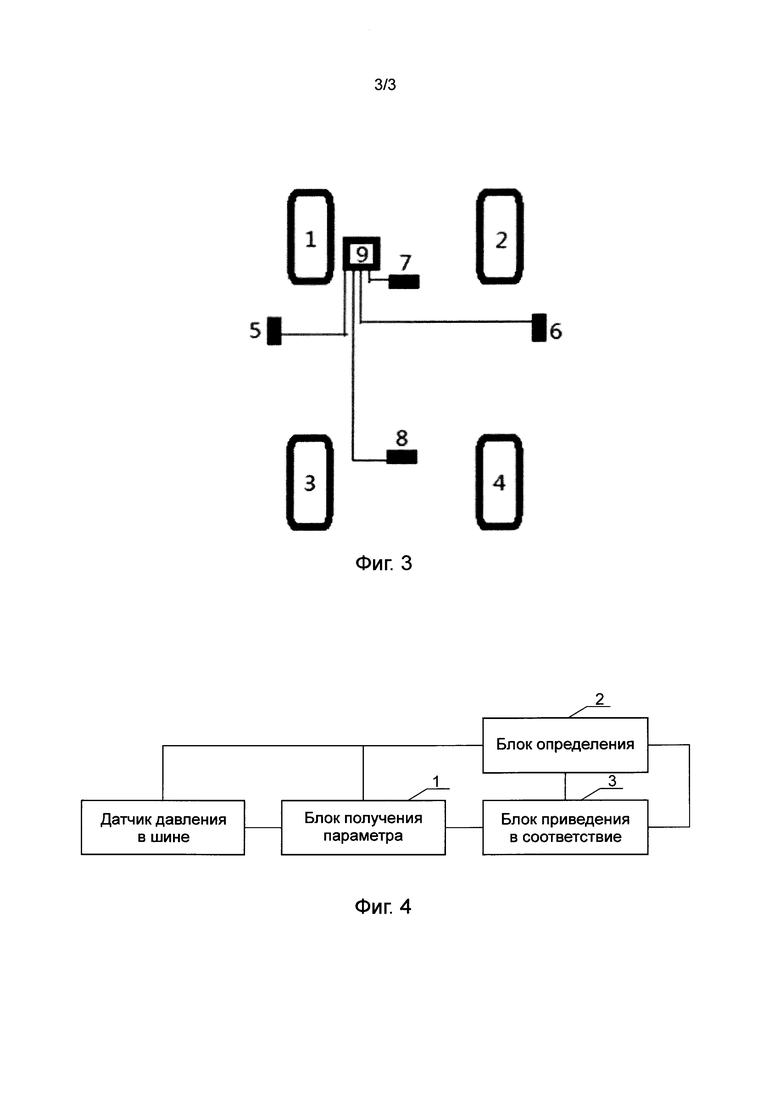
См. фиг. 3. Фиг. 3 - схематическая структурная схема контроллера для приведения в соответствие датчика давления в шине и шины, предлагаемого настоящим изобретением. Система включает в себя контроллер 9 системы PEPS (Passive Entry Passive Start - Пассивного доступа/пассивного пуска) (контроллер может отправлять запрос на определение значения расстояния и идентификатора датчику давления в шине посредством антенны системы PEPS и может также принимать идентификатор и значение расстояния, отправляемые датчиком давления в шине, посредством радиочастотной антенны) и четыре радиочастотные антенны 5, 6, 7, и 8 системы PEPS. Ссылочные позиции 1, 2, 3 и 4 на фигуре 3 обозначают шины, содержащие датчики давления в шине, соответственно, и можно понять, что низкочастотная радиочастотная антенная система PEPS как правило включает в себя радиочастотные антенны левой и правой дверных ручек и радиочастотные антенны, установленные в передней, средней и задней частях автомобиля и в заднем бампере. В качестве дополнительного решения в настоящем изобретении выбраны антенны левой и правой дверных ручек (соответствующие ссылочным позициям 5, 6 соответственно на фиг. 3) и передняя и задняя радиочастотные антенны (соответствующие ссылочным позициям 7, 8 соответственно на фиг.3).
Исходя из вышеупомянутого дополнительного решения, процесс шага S101 содержит:
шаг S101V: активация четырех радиочастотных антенн соответственно;
Можно понять, что, так как положение датчика давления в шине, в целом, в автомобиле является относительно фиксированным (в определенной точке окружности ступицы закрепленного колеса), то можно определить положение всего автомобиля посредством четырех низкочастотных антенн. Антенны 5, 6 левой и правой дверных ручек могут определять, расположен ли датчик давления в шине (или шина) на левой стороне или на правой стороне, а передние и задние низкочастотные антенны могут определять, расположен ли датчик давления в шине (или шина) на передней стороне или на задней стороне.
Конечно, для получения идентификатора и положения датчика давления в шине могут комбинироваться и другое количество антенн, и это не ограничивается специальным образом в настоящем изобретении.
шаг S1012: управление четырьмя радиочастотными антеннами для отправки запроса на определение значения расстояния и идентификатора датчику давления в шине соответственно, и соответственно прием идентификатора и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния a4, отправляемого датчиком давления в шине в соответствии с запросом на определение давления и идентификатора соответственно; и
шаг S1013. получение идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния a4 от четырех радиочастотных антенн соответственно.
Настоящим изобретением предлагается способ для приведения в соответствие датчика давления в шине и шины, на основе преимуществ первого варианта осуществления, идентификатор и положение датчика давления в шине принимаются существующим контроллером системы PEPS и радиочастотными антеннами системы PEPS в автомобиле, также выполняется ряд оценок для окончательного приведения датчика давления в шине в соответствие с шиной, с целью экономии затрат и экономии пространства автомобиля.
Применительно к вышеупомянутому варианту осуществления способа, см. фиг 4, фиг. 4 - схематическая структурная схема контроллера для предлагаемого настоящим изобретением приведения в соответствие датчика давления в шине и шины. Контроллер содержит:
блок 1 получения параметра, предназначенный для получения идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN N устройствами получения значения расстояния соответственно, при этом значение расстояния aj относится к расстоянию от датчика давления в шине до j-го устройства получения значения расстояния, 1≤j≤N, и N - целое число, составляющее не менее 2;
блок 2 определения, предназначенный для определения положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN; и
блок 3 приведения в соответствие, предназначенный для приведения положения в соответствие с идентификатором.
В частном случае, блок 1 получения параметра содержит:
блок активации антенны, предназначенный для соответствующей активации N радиочастотных антенн;
промежуточный блок получения базового параметра, предназначенный для управления N радиочастотными антеннами для отправки запроса на определение значения расстояния и идентификатора датчику давления в шине соответственно, и соответственно приема идентификатора и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN, отправляемого датчиком давления в шине в соответствии с запросом на определение значения расстояния и идентификатора, при этом значение расстояния aj относится к расстоянию от датчика давления в шине до j-ой радиочастотной антенны, 1≤j≤N и N - целое число не менее 2;
первый блок получения параметра, предназначенный для получения идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния aj до значения расстояния aN от N радиочастотных антенн соответственно.
второй блок получения параметра, предназначенный для расчета положения датчика давления в шине в соответствии с идентификатором датчика давления в шине и значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN, получаемым от N радиочастотных антенн соответственно.
В частном случае, контроллер представляет собой контроллер системы PEPS, и радиочастотная антенна представляет собой радиочастотную антенну системы PEPS;
контроллер далее содержит:
блок приема сигнала активации, предназначенный для приема сигнала активации антенны, отправляемого триггерным датчиком дверной ручки.
В частном случае, контроллер далее содержит: модуль первичного определения, модуль вторичного определения и блок завершения;
модуль первичного определения используется для определения того, приводится ли в соответствие датчик давления в шине впервые, в случае если датчик давления в шине приводится в соответствие впервые, инициации блока приведения в соответствие для приведения положения в соответствие с идентификатором, и в случае если датчик давления в шине не приводится в соответствие впервые, инициации модуля вторичного определения для определения того, является ли положение аналогичным первоначальному положению, записанному в датчику давления в шине;
модуль вторичного определения используется для определения того, является ли положение аналогичным первоначальному положению, записанному в датчике давления в шине, в случае если положение является аналогичным первоначальному положению, записанному в датчике давления в шине, инициирования блока завершения для завершения приведения в соответствие, и в случае если положение отличается от первоначального положения, записанного в датчике давления в шине, инициирования блока приведения в соответствие для приведения положения в соответствие с идентификатором; и
блок завершения используется для завершения приведения в соответствие.
В частности, для ознакомления с описанием контроллера для приведения в соответствие датчика давления в шине и шины, предлагаемого настоящим изобретением, можно обратиться к вышеупомянутому варианту осуществления способа, и оно не будет приводится здесь повторно.
Контроллер для приведения в соответствие датчика давления в шине и шины, предлагаемый настоящим изобретением, содержащий: блок получения параметра, используемый для получения идентификатора датчика давления в шине и значений расстояний от датчика давления в шине до N устройств получения значения расстояния N устройствами получения значения расстояния соответственно; блок определения, используемый для определения положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN; и блок приведения в соответствие, используемый для приведения положения в соответствие с идентификатором. Таким образом, в настоящем изобретении, датчик давления в шине приводится в соответствие с положением шины устройствами получения значения расстояния, чтобы упростить процесс приведения в соответствие датчика давления в шине и положения шины и повысить эффективность приведения в соответствие.
Для решения вышеупомянутых технических задач, настоящим изобретением далее предлагается автомобиль, включающий в себя контроллер для приведения в соответствие датчика давления в шине и шины по любому из вышеперечисленных вариантов осуществления.
Для ознакомления с описанием контроллера для приведения в соответствие датчика давления в шине и шины, можно обратиться к вышеупомянутому варианту осуществления способа, и оно не будет приводится здесь повторно.
Варианты осуществления в описании приводятся последовательно, в каждом варианте осуществления выделяется отличие от других вариантов осуществления, и для описания идентичных или схожих между вариантами осуществления частей можно обращаться к другим вариантам осуществления. Устройство, раскрываемое в варианте осуществления, по существу соответствует способу, раскрываемому в других вариантах осуществления, и таким образом описывается в простой форме, и можно обращаться к части пояснения способа.
Далее следует отметить, что в настоящем описании, относительные термины, такие как первый, второй и подобные им термины, используются лишь для отличения одной сущности или операции от другой сущности или операции, и не требуют и не подразумевают существования такого фактического отношения или последовательности между этими сущностями или операциями. Кроме того, термины «содержащий», «включающий в себя» или иные варианты данных терминов относятся к неэксклюзивному включению, таким образом, что процесс, способ, изделие или устройство, включающее в себя несколько элементов, включает в себя не только данные элементы, но также и иные элементы, не перечисленные в явной форме или также элементы, присущие этому процессу, способу, изделию или устройству. Без каких-либо прочих ограничений, элементы, определяемые формулировкой «включающий в себя ......», не исключают существование других идентичных элементов в процессе, способе, изделии или устройстве, включающем в себя элементы.
Посредством вышеприведенного описания раскрываемых вариантов осуществления, специалисты в данной области техники могут реализовать или использовать настоящее изобретение. Специалистам в данной области техники будет очевидно множество модификаций данных вариантов осуществления, и определяемые здесь общие принципы могут быть реализованы в других вариантах осуществления без выхода за рамки сущности и объема настоящего изобретения. Соответственно, настоящее изобретение не ограничивается показанными здесь вариантами осуществления, но относится к наиболее широкому спектру, соответствующему раскрываемым здесь принципам и новым отличительным признакам.
Настоящим изобретением предлагается способ и контроллер для приведения в соответствие датчика давления в шине и шины и автомобиль. Способ включает в себя получение сигнала активации антенны, оправленного триггерным датчиком дверной ручки, активацию N радиочастотных антенн соответственно, получение идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния аj до значения расстояния aN N радиочастотных антенн соответственно, при этом значение расстояние аj относится к расстоянию от датчика давления в шине до j-й радиочастотной антенны, 1≤j≤N, и N - целое число, составляющее не менее 2, определение положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния аN, приведение положения в соответствие с идентификатором. Таким образом, в настоящем изобретении, датчик давления в шине приводится в соответствие с положением шины устройствами получения значения расстояния, чтобы упростить процесс приведения в соответствие датчика давления в шине и положения шины и повысить эффективность такого приведения в соответствие. 3 н. и 6 з.п. ф-лы, 4 ил.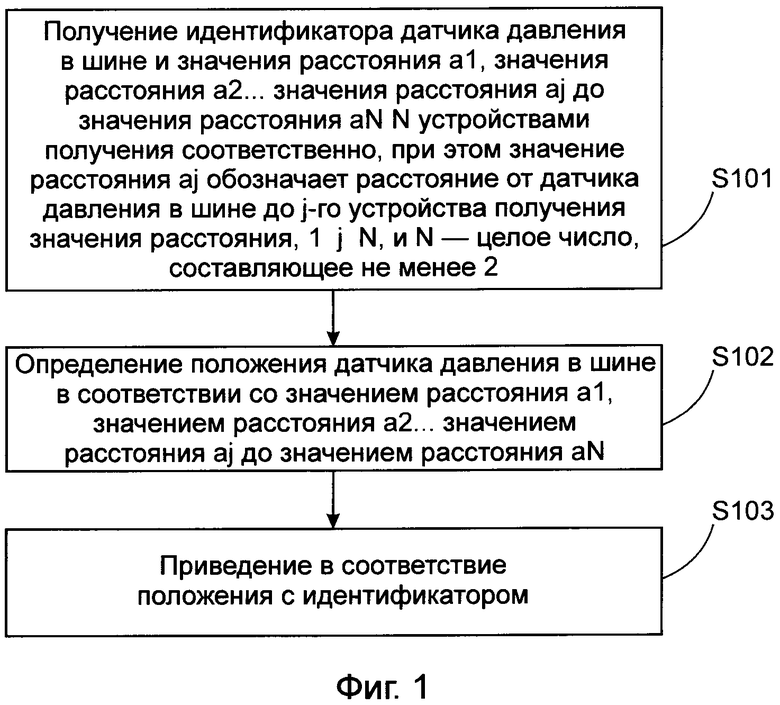
1. Способ приведения в соответствие датчика давления в шине и шины, отличающийся тем, что упомянутый способ содержит:
шаг 1010: получение сигнала активации антенны, оправленного триггерным датчиком дверной ручки;
шаг S1011: активация N радиочастотных антенн соответственно;
шаг S101: получение идентификатора датчика давления в шине и значения расстояния a1, значения расстояния a2 … значения расстояния аj до значения расстояния aN N радиочастотных антенн соответственно, при этом значение расстояние аj относится к расстоянию от датчика давления в шине до j-й радиочастотной антенны, 1≤j≤N, и N - целое число, составляющее не менее 2;
шаг S102: определение положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния аN; и
шаг S103: приведение положения в соответствие с идентификатором.
2. Способ по п. 1, отличающийся тем, что шаг S101 содержит:
шаг S1012: управление N радиочастотными антеннами с обеспечением отправки соответствующего запроса идентификатора и определения значения расстояния датчику давления в шине и соответствующий прием идентификатора и значения расстояния a1, значения расстояния a2 … значения расстояния аj до значения расстояния аN, отправляемого датчиком давления в шине в соответствии с соответствующим запросом идентификатора и определения расстояния; и
шаг S1013: получение идентификатора датчика давления в шине и значения расстояния а1, значения расстояния a2 … значения расстояния aj до значения расстояния aN от N радиочастотных антенн соответственно.
3. Способ по п. 2, отличающийся тем, что радиочастотная антенна представляет собой радиочастотную антенну системы пассивного доступа/пассивного пуска (PEPS).
4. Способ по п. 1, отличающийся тем, что после шага S102 способ далее содержит:
шаг S102': определение того, что датчик давления в шине приводится в соответствие впервые, в случае если датчик давления в шине приводится в соответствие впервые, переход к шагу S103, и в случае если датчик давления в шине не приводится в соответствие впервые, переход к шагу S104;
шаг S104: определение того, что положение является аналогичным первоначальному положению, записанному в датчике давления в шинах, в случае если положение является аналогичным первоначальному положению, записанному в датчике давления в шинах, переход к шагу S105, и в случае если положение отличается от первоначального положения, записанного в датчике давления в шинах, переход к шагу S103; и
шаг S105: завершение приведения в соответствие.
5. Контроллер для приведения в соответствие датчика давления в шинах и шины, отличающийся тем, что упомянутый контроллер содержит:
блок приема сигнала активации, предназначенный для приема сигнала активации антенны, отправленного триггерным датчиком дверной ручки;
блок активации антенны, предназначенный для соответствующей активации N радиочастотных антенн соответственно;
блок получения параметра, предназначенный для получения идентификатора датчика давления в шине и значения расстояния а1, значения расстояния а2 … значения расстояния аj до значения расстояния аN N радиочастотных антенн соответственно, при этом значение расстояния аj относится к расстоянию от датчика давления в шине до j-й радиочастотной антенны, 1≤j≤N, и N - целое число, составляющее не менее 2;
блок определения, предназначенный для определения положения датчика давления в шине в соответствии со значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN; и
блок приведения в соответствие, предназначенный для приведения положения в соответствие с идентификатором.
6. Контроллер по п. 5, отличающийся тем, что блок получения параметра содержит: промежуточный блок получения базового параметра, предназначенный для соответствующего управления N радиочастотными антеннами для отправки запроса на определение значения расстояния и идентификатора датчику давления в шине и, соответственно, приема идентификатора и значения расстояния а1, значения расстояния а2 … значения расстояния аj до значения расстояния aN, отправляемого датчиком давления в шине в соответствии с запросом на определение значения расстояния и идентификатора, при этом значение расстояния аj относится к расстоянию от датчика давления в шине до j-ой радиочастотной антенны, 1≤j≤N, и N - целое число не менее двух 2;
первый блок получения параметра, предназначенный для соответствующего получения идентификатора датчика давления в шине и значения расстояния а1, значения расстояния a2 … значения расстояния aj до значения расстояния aN от N радиочастотных антенн; и
второй блок получения параметра, предназначенный для расчета положения датчика давления в шине в соответствии с идентификатором датчика давления в шине и значением расстояния a1, значением расстояния a2 … значением расстояния aj до значения расстояния aN, получаемым от N радиочастотных антенн соответственно.
7. Контроллер по п. 6, отличающийся тем, что контроллер является контроллером системы пассивного доступа/пассивного пуска (PEPS), а радиочастотная антенна является радиочастотной антенной системы PEPS.
8. Контроллер по п. 5, отличающийся тем, что контроллер также содержит: модуль первичного определения, модуль вторичного определения и блок завершения;
модуль первичного определения используется для определения, приводится ли в соответствие датчик давления в шине впервые, в случае если датчик давления в шине приводится в соответствие впервые, инициации блока приведения в соответствие для приведения положения в соответствие с идентификатором, и в случае если датчик давления в шине не приводится в соответствие впервые, инициации модуля вторичного определения для определения, является ли положение аналогичным первоначальному положению, записанному в датчике давления в шине;
модуль вторичного определения используется для определения того, является ли положение аналогичным первоначальному положению, записанному в датчике давления в шине, в случае если положение является аналогичным первоначальному положению, записанному в датчике давления в шине, инициирования блока завершения для завершения приведения в соответствие, и в случае если положение отличается от первоначального положения, записанного в датчике давления в шине, инициирования блока приведения в соответствие для приведения положения в соответствие с идентификатором; а блок завершения используется для завершения приведения в соответствие.
9. Автомобиль, отличающийся тем, что упомянутый автомобиль содержит контроллер для приведения в соответствие датчика давления в шине и шины по любому из пп. 5-8.
| WO 2005051684 A1, 09.06.2005 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гусли звончатые | 1958 |
|
SU114779A1 |

