Область техники, к которой относится изобретение
Настоящее изобретение относится к способу и системе для считывания данных с меток радиочастотной идентификации (RFID) и/или записи данных на RFID-метки, интегрированные/встроенные или нанесенные в/на шины, транспортируемые на конвейерных лентах.
Уровень техники
В шинной отрасли промышленности ощущается потребность в решениях, позволяющих автоматически и однозначно идентифицировать шины во время их производства, использования и утилизации.
Например, с конкретной ссылкой на производство шин, автоматическая и однозначная идентификация шин позволяет оптимизировать производственные процессы и логистические операции, активизировать использование автоматизированных систем управления, выполнять эффективное отслеживание/трассировку шин и, следовательно, создавать предприятия по производству интеллектуальных шин.
В этом контексте известно использование штрих-кодов, нанесенных на шины, для управления производством шин и создания истории производства отдельных шин. Однако это решение имеет свои ограничения, так как напечатанные штрих-коды могут быть удалены или повреждены во время производства и/или нормальной эксплуатации шин, в результате чего они станут неразборчивыми или, в любом случае, трудночитаемыми.
Для устранения таких ограничений в документе US 2016/0092814 A1 предложено использовать систему идентификации шин, основанную на метках радиочастотной идентификации (RFID). В частности, в документе US 2016/0092814 A1 раскрыта система управления производством шин с использованием RFID-меток, работа которой включает в себя: прикрепление RFID-метки к шине перед производством готовой шины в процессах производства шин; распознавание метки шины, прикрепленной к шине в каждом из производственных процессов; и, таким образом, управление информацией в соответствии с производственным процессом в отношении отдельной шины. Система управления производством шин в соответствии с документом US 2016/0092814 A1 содержит часть прикрепления RFID-метки; множество RFID-считывателей; множество терминалов управления для соответствующих процессов; сервер управления партиями шин; и сервер управления производством шин. В документе US 2016/0092814 A1 также описано распознавание кода RFID-метки, прикрепленной к шине, транспортируемой по конвейерной ленте, при этом распознавание кода выполняется RFID-считывателем, смежным с упомянутой конвейерной лентой.
Кроме того, в заявке на патент Италии № 102016000009727 раскрыто конфигурируемое и настраиваемое беспроводное радиочастотное сенсорное устройство, которое может быть успешно интегрировано/включено в шину или нанесено не нее для обеспечения автоматической идентификации шины во время ее производства, во время логистических операций, а также во время ее нормальной эксплуатации. Кроме того, конфигурируемое и настраиваемое радиочастотное беспроводное сенсорное устройство согласно документу 102016000009727 может быть для удобства выполнено с возможностью предоставления также диагностических данных, таких как данные о температуре или давлении.
В документе WO2016095922 раскрыт способ обращения с шинами и их обработки на предприятии по производству шин. Способ включает в себя позиционирование неотвержденной шины в опоре и перемещение опоры с шиной в конвейерной системе.
В документе DE202017102186 раскрыта пневматическая шина с внутренней поверхностью, ограничивающей полость, и с внешней поверхностью, обращенной в сторону от внутренней поверхности; при этом шина содержит радиочип, имеющий антенну, причем радиочип выполнен с возможностью работы с электромагнитными волнами, и электромагнитные волны имеют длину волны; при этом антенна по всей своей длине находится на расстоянии от внешней поверхности, которое в среднем составляет менее 1/10 длины волны и/или менее 25 мм.
В документе EP 1792685 раскрыты способ и устройство для идентификации трехмерных координат целевой области на шине, причем способ включает в себя: получение цифрового изображения шины; нахождение края борта шины с использованием значений яркости пикселей из изображения шины; вычисление центра и радиуса окружности борта шины с использованием множества пикселей изображения на краю борта шины; и выполнение поиска яркости пикселей по окружности борта шины с использованием центра и радиуса окружности борта шины для определения координат X, Y целевой зоны. Координата Z и наклон целевой зоны определяются путем нескольких вычислений расстояний между точками по всей области.
Сущность изобретения
Заявитель провел углубленное исследование с целью разработки улучшенного способа и системы для считывания и/или записи данных с/на RFID-метки, интегрированные/встроенные или нанесенные на/в шины, транспортируемые на конвейерных лентах, тем самым предлагая настоящее изобретение.
Таким образом, задача изобретения состоит в том, чтобы обеспечить способ и систему вышеупомянутого типа, обеспечивающих, в общем, превосходную производительность считывания/записи на основе RFID и, в частности, однозначное обнаружение RFID-меток с повышенной производительностью по сравнению с известными в настоящее время решениями.
Эта задача решена с помощью настоящего изобретения, так как оно относится к способу и системе для считывания и/или записи данных с/на метки радиочастотной идентификации (RFID) шин, транспортируемых на конвейерной ленте, как определено в прилагаемой формуле изобретения.
Более конкретно, настоящее изобретение относится к способу считывания и/или записи данных с/на RFID-метки шин, транспортируемых на конвейерной ленте в направлении транспортировки, причем каждая шина снабжена соответствующей RFID-меткой, хранящей однозначный идентификатор упомянутой шины. Упомянутый способ содержит предоставление:
• антенны, установленной над или рядом с конвейерной лентой и выполненной с возможностью:
- излучения радиочастотных (РЧ) сигналов в направлении зоны покрытия на конвейерной ленте, и
- приема обратно рассеянных РЧ сигналов из упомянутой зоны покрытия; и
• считывателя, подключенного к антенне, чтобы управлять последней при передаче и приеме.
Способ также содержит выполнение этапа предварительной калибровки, включающей в себя калибровку считывателя путем:
a1) размещения данной шины, снабженной данной меткой RFID, на конвейерной ленте и удержание упомянутой данной шины в неподвижном состоянии под/рядом с антенной;
a2) до тех пор, пока данная шина удерживается неподвижной под/рядом с антенной,
- определения минимальной мощности передачи, необходимой для активации данной метки RFID,
- определения калибровочной мощности передачи выше, чем упомянутая минимальная мощность передачи, и
- излучения, через антенну, калибровочных РЧ сигналов с упомянутой калибровочной мощностью передачи и приема, через упомянутую антенну, калибровочных РЧ сигналов обратного рассеяния от данной RFID-метки;
a3) при продолжении излучения калибровочных радиочастотных сигналов и приема обратно рассеянных калибровочных радиочастотных сигналов, постепенного перемещения данной шины вперед и назад по конвейерной ленте до тех пор, пока данная RFID-метка не перестанет реагировать;
a4) оценки размера зоны покрытия в направлении, параллельном направлению транспортировки, на основе операции a3);
a5) измерения
- первых уровней принятой мощности калибровочных радиочастотных сигналов, принятых с помощью данной метки RFID когда данная шина остается неподвижной под/рядом с антенной, и когда упомянутая данная шина перемещается вперед и назад, и
- вторых уровней принятой мощности обратно рассеянных калибровочных радиочастотных сигналов, принятых считывателем через антенну, когда данная шина остается неподвижной под/рядом с антенной, и когда упомянутая данная шина перемещается вперед и назад;
a6) повторения операций a1)-a5) с разными шинами, тем самым получая
- множество калибровочных мощностей передачи, относящихся к разным шинам,
- множество оценочных размеров зоны покрытия, относящихся к различным шинам, и
- множество первых и вторых уровней принимаемой мощности, относящихся к разным шинам; и
a7) вычисления
- средней мощности передачи на основе полученных калибровочных мощностей передачи,
- среднего размера зоны покрытия на основе полученных оценочных размеров,
- частоты опроса на основе среднего размера зоны покрытия и заданной скорости транспортировки конвейерной ленты,
- средних уровней принимаемой мощности на основе полученных первого и второго уровней принимаемой мощности, и
- одного или более пороговых значений на основе средних уровней принимаемой мощности.
Более того, способ дополнительно содержит выполнение этапа считывания и/или записи, который включает в себя функционирование откалиброванного считывателя для:
b1) излучения, через антенну, одного или более радиочастотных сигналов опроса со средней мощностью передачи и частотой опроса, вычисленной на этапе предварительной калибровки;
b2) приема, через антенну, одного или более обратно рассеянных РЧ сигналов опроса от РЧ метки шины, проходящей через зону покрытия, причем один или более упомянутых обратно рассеянных РЧ сигналов опроса несут однозначный идентификатор транспортируемой шины;
b3) измерения
- одного или более третьих уровней принимаемой мощности РЧ сигнала(ов) опроса, принятого с помощью RFID-метки транспортируемой шины, и
- одного или более четвертых уровней принимаемой мощности одного или более обратно рассеянных РЧ сигналов опроса, принятого считывателем через антенну;
b4) обнаружения транспортируемой шины путем сравнения третьего и четвертого уровней принимаемой мощности с порогом(ами), вычисленным(и) на этапе предварительной калибровки; и
b5) идентификации обнаруженной транспортируемой шины на основе однозначного идентификатора, переносимого одним или более обратно рассеянными РЧ сигналами опроса.
Для удобства этап считывания и/или записи включает в себя функционирование откалиброванного считывателя также для:
b6) считывания и/или записи данных, относящихся к шине, с/в RFID-метку транспортируемой шины.
Предпочтительно антенна выполнена таким образом, чтобы иметь такую диаграмму направленности, которая приводила бы к зоне покрытия, покрывающей:
• всю ширину конвейерной ленты в направлении, перпендикулярном направлению транспортировки; и
• ограниченную длину в направлении, параллельном упомянутому направлению транспортировки.
Для удобства антенна является плоской, расположена параллельно конвейерной ленте и имеет заданную длину в направлении, параллельном направлению транспортировки, и заданную ширину в направлении, перпендикулярном упомянутому направлению транспортировки, причем заданная длина больше заданной ширины.
Предпочтительно, первый, второй, третий и четвертый уровни принимаемой мощности указывают на измерения амплитуды и фазы принятой мощности.
Кроме того, настоящее изобретение относится также к системе для считывания и/или записи данных с/на RFID-метки шин, транспортируемых на конвейерной ленте в направлении транспортировки, причем каждая шина снабжена соответствующей RFID-меткой, хранящей однозначный идентификатор упомянутой шины. Упомянутая система содержит:
• антенну, установленную над или рядом с конвейерной лентой и выполненную с возможностью
- излучения радиочастотных сигналов в направлении зоны покрытия на конвейерной ленте, и
- приема обратно рассеянных РЧ сигналов из упомянутой зоны покрытия; и
• считыватель, который подключен к антенне, чтобы управлять последней при передаче и приеме и предназначен для выполнения этапа предварительной калибровки и, после калибровки, может выполнять этап считывания и/или записи вышеупомянутого способа согласно настоящему изобретению.
Предпочтительно система содержит множество антенн, которые:
• установлены в разных положениях вдоль конвейерной ленты;
• выполнены, каждая по отдельности, с возможностью излучения РЧ сигналов в направлении соответствующей зоны покрытия на конвейерной ленте и приема обратно рассеянных РЧ сигналов из нее; и
• подключены к считывателю с возможностью функционирования в режимах передачи и приема;
где положение каждой обнаруженной шины определяется считывателем или электронным блоком управления, подключенным к нему или интегрированным/встроенным в него, на основе антенны (для удобства на основе положения антенны), которая приняла обратно рассеянный один или более РЧ сигналов опроса, на основе которых была обнаружена упомянутая шина.
Краткое описание чертежей
Для лучшего понимания настоящего изобретения предпочтительные варианты осуществления, которые предназначены исключительно в качестве неограничивающих примеров, будут теперь описаны со ссылкой на прилагаемые чертежи (все представлены не в масштабе), на которых:
на фиг.1 схематично показан RFID-шлюз согласно предпочтительному (хотя и неограничивающему) варианту осуществления настоящего изобретения;
на фиг.2, 3 и 4 показан пример диаграммы направленности антенны RFID-шлюза, показанного на фиг.1;
на фиг.5 схематично показан пример сценария для выполнения предварительной калибровки RFID-шлюза, показанного на фиг.1; и
на фиг.6 схематично показан пример обнаружения последовательности из трех шин, проходящих через RFID-шлюз, показанный на фиг.1.
Подробное описание изобретения
Следующее обсуждение представлено для того, чтобы дать возможность специалисту в данной области техники осуществить и использовать настоящее изобретение. Различные модификации показанных и описанных вариантов осуществления будут очевидны для специалистов в данной области техники без отклонения от объема настоящего изобретения, как это заявлено в данном документе. Таким образом, настоящее изобретение не предназначено для ограничения показанными и описанными вариантами осуществления, но должно предоставлять самый широкий объем защиты, согласующийся с принципами и признаками, раскрытыми в данном документе и определенными в прилагаемой формуле изобретения.
Настоящее изобретение касается использования одной или нескольких систем считывания и/или записи RFID (в дальнейшем называемых RFID-шлюзом(ами)), установленных вдоль пути конвейерной ленты, для контроля шин, транспортируемых на упомянутой конвейерной ленте и установленных, каждая по отдельности, с соответствующей RFID-меткой, хранящей данные, относящиеся к шине, включая однозначный идентификатор шины и для удобства также дополнительную информацию (например, элементы информации, указывающие модель шины, дату и/или место производства, материалы, применяемые для изготовления шин и т.д.).
Настоящее изобретение можно преимущественно использовать для приложений автоматического управления, контроля и отслеживания на предприятиях по производству, сортировке и утилизации (интеллектуальных) шин, в которых используются конвейерные ленты. Фактически, используя настоящее изобретение, можно развернуть RFID-шлюзы вдоль путей конвейерных лент для управления/контроля/отслеживания шин, движущихся на упомянутых конвейерных лентах, причем RFID-шлюзы при использовании считывают данные, которые относятся к шинам и хранятся на RFID-метках транспортируемых шин, и при необходимости могут также для удобства записывать (то есть сохранять) данные на них (например, однозначные идентификаторы и/или, как объяснялось ранее, также дополнительную информацию).
В частности, при использовании RFID-шлюз согласно настоящему изобретению имеет возможность однозначно и по отдельности идентифицировать каждую транспортируемую шину, избегая проблемы множественных считываний с соседних шин/конвейеров. Это позволяет автоматически выполнять определенные действия с каждой отдельной транспортируемой шиной и однозначно отслеживать/контролировать последовательность транспортируемых шин.
Для лучшего понимания настоящего изобретения на фиг.1 схематично показан RFID-шлюз (обозначенный в общем цифрой 1) согласно предпочтительному (хотя и неограничивающему) варианту осуществления настоящего изобретения.
В частности, RFID-шлюз 1 включает в себя антенну 2 (обычно антенную решетку), размещенную над конвейерной лентой 3, транспортирующей шины 4 вдоль (то есть параллельно) заданного направления транспортировки, причем каждая шина 4 снабжена соответствующей RFID-меткой (на фиг.1 не показана), хранящей (по меньшей мере) однозначный идентификатор упомянутой шины 4.
Антенна 2 является по существу плоской и расположенной параллельно конвейерной ленте 3 и базовой плоскости xy, определяемой:
• первым опорным направлением х, параллельным заданному направлению транспортировки шин 4 на конвейерной ленте 3; и
• вторым опорным направлением у, перпендикулярным первому опорному направлению х (и, следовательно, также ортогональным упомянутому заданному направлению транспортировки).
Антенна 2 имеет заданную длину L вдоль первого опорного направления х (то есть параллельно ему) и заданную ширину W вдоль второго опорного направления у (то есть параллельно ему), где заданная длина L больше, чем заданная ширина W (то есть L > W)
Антенна 2 расположена на заданном расстоянии D от конвейерной ленты 3 вдоль третьего опорного направления (то есть параллельно ему), ортогонального к первому и второму опорным направлениям х и у.
Предпочтительно, чтобы облегчить обнаружение транспортируемых шин 4, антенна 2 представляет собой направленную антенну, выполненную с возможностью излучения и приема радиочастотных (РЧ) сигналов в/из зоны покрытия, покрывающей:
• всю ширину конвейерной ленты 3 вдоль второго опорного направления у (то есть параллельно ему); и
• ограниченную длину вдоль первого опорного направления х (то есть параллельно ему).
Для удобства антенна 2 представляет собой направленную антенну, выполненную таким образом, чтобы иметь диаграмму направленности лезвиеобразной формы, которая ориентирована ортогонально по отношению к данному направлению транспортировки шин 4 на конвейерной ленте 3 (то есть, перпендикулярно первому опорному направлению х и параллельно второму опорному направлению у) и которая имеет главный лепесток, охватывающий всю ширину конвейерной ленты 3 вдоль второго опорного направления у и ограниченную длину вдоль первого опорного направления х.
В связи с этим, на фиг 2, 3 и 4 показан пример диаграммы направленности для антенны 2, соответственно, в базовом пространстве xyz, базовой плоскости xz и базовой плоскости ху (RFID-метка, нанесенная на показанную шину 4, на фиг.3 и 4 обозначена поз.5).
Для удобства антенна 2 выполнена с возможностью излучения/приема РЧ сигналов, имеющих частоты в диапазоне ультравысоких частот (УВЧ, UHF), предпочтительно в диапазоне частот 860-960 МГц, более предпочтительно в поддиапазоне частот 865-868 МГц и/или в поддиапазоне частот 902–928 МГц.
Кроме того, дополнительные требования к антенне 2 могут включать в себя:
• усиление выше 0 дБ;
• работа на основе круговой поляризации;
• ширина луча меньше 90° по меньшей мере в одной плоскости.
Обращаясь снова к фиг.1, RFID-шлюз 1 дополнительно включает в себя блок/устройство 6 считывания и/или записи (далее для краткости просто называемое считывателем), подключенное к антенне 2 проводным способом, например, с помощью коаксиального кабеля. Более того, блок 7 управления и обработки (например, компьютер) локально или удаленно подключен к считывателю 6 для управления его работой. В этой связи следует отметить, что блок 7 обработки и управления также может быть для удобства интегрирован/встроен в считыватель 6.
Для удобства считыватель 6 может быть подключен к множеству антенн 2, установленных в разных положениях вдоль пути конвейерной ленты 3. Например, считыватель 6 может быть для удобства подключен к четырем антеннам 2 напрямую или через мультиплексор (например, для питания различных антенн 2 могут быть для удобства приняты стратегии разделения по времени/мощности).
Кроме того, необязательные требования к считывателю 6 могут для удобства включать в себя:
• поддержку всего диапазона частот 860-960 МГц, или вышеупомянутых частотных поддиапазонов;
• возможность поддерживать несколько антенных подключений и работать до уровня +31,5 дБм;
• возможность работы с отдельными уровнями считывания и записи и регулируемой по команде мощностью, например, от 5 дБм до 31,5 дБм с точностью по меньшей мере +/- 0,5 дБм.
С учетом вышеизложенного, при использовании, когда шины 4 транспортируются на конвейерной ленте 3, RFID-шлюз 1 может однозначно обнаруживать и автоматически идентифицировать каждую шину 4, проходящую под антенной 2. Следовательно, система управления/контроля, использующая множество RFID-шлюзов 1 (и/или множество антенн 2, подключенных к одному или нескольким считывателям 6), установленных вдоль пути конвейерной ленты 3 (или вдоль путей многочисленных конвейерных лент 3), может точно определить местоположение каждой перемещаемой шины 4.
Кроме того, с помощью удобного использования надлежащей обработки переданных и принятых РЧ сигналов (по амплитуде, фазе и времени) можно также контролировать/отслеживать последовательность шин 4, проходящих через один/каждый RFID-шлюз 1 (или, в случае нескольких антенн 2, подключенных к одному или нескольким считывателям 6, последовательность шин 4, проходящих под каждой антенной 2).
Более того, каждый считыватель 6 для удобства может быть выполнен с возможностью:
• считывания, помимо однозначных идентификаторов шин, также дополнительных данных, относящихся к шинам, которые хранятся на RFID-метках 5 транспортируемых шин 4 (например, данных относительно элементов информации, указывающих модель шины, даты и/или места производства, материалов, применяемых для изготовления шин и т.д.); и
• при необходимости также записи (то есть сохранения) данных на RFID-метках 5 транспортируемых шин 4.
В этой связи следует отметить, что, как ясно, один/каждый считыватель 6 может быть для удобства использован для записи также однозначных идентификаторов на RFID-метки 5.
Операциями считывания и/или записи можно для удобства управлять с помощью:
• блока 7 управления и обработки, подключенного ко всем используемым считывателям 6, причем упомянутый блок 7 управления и обработки выполнен с возможностью (в частности, запрограммирован) выборочного управления каждым считывателем 6 для выполнения одной или более соответствующих заданных операций считываний и/или записи; или
• центрального блока управления, удаленно подключенного ко всем используемым блоками 7 обработки и управления, причем упомянутый центральный блок управления выполнен с возможностью (в частности, запрограммирован) выборочного управления каждым блоком 7 обработки и управления для того, чтобы заставить последний выборочно управлять каждым считывателем 6, подключенным к нему, для выполнения одной или нескольких соответствующих заданных операций считывания и/или записи.
В более общем случае, способ считывания и/или записи данных с/на RFID-метки 5 шин 4, транспортируемых на конвейерной ленте 3, согласно предпочтительному варианту осуществления настоящего изобретения включает в себя:
• этап предварительной калибровки, включающий калибровку считывателя 6, причем упомянутый этап предварительной калибровки удобно выполнять сразу после установки RFID-шлюза 1 или в случае, если окружающая среда претерпевает существенные изменения, которые могут повлиять на сценарий радиочастотной связи (например, изменения положений рассеивающих объектов); и
• этап считывания и/или записи, выполняемый с помощью калиброванного считывателя 6.
Далее предпочтительный (хотя и неограничивающий) вариант осуществления упомянутого способа будет подробно описан с конкретной ссылкой на RFID-шлюз 1, а именно в случае одной единственной антенны 2, одного единственного считывателя 6 и одного единственного блока 7 обработки и управления, при этом ясно, что нижеследующие идеи изобретения могут применяться с соответствующими изменениями к различным системным архитектурам, включая использование одного или нескольких блоков 7 обработки и управления, каждый из которых подключен к одному или нескольким считывателям 6, каждый из которых подключен к одной или нескольким антеннам 2 (которые для удобства могут иметь другое пространственное расположение по отношению к конвейерной ленте, например, могут быть расположены рядом/близко к ее краю).
Предпочтительно обнаружение RFID-метки основано на комбинированном использовании амплитуды мощности и фазы РЧ сигналов, передаваемых считывателем 6 через антенну 2 в RFID-метку 5 и обратно рассеянных от последней в антенну 2 и, следовательно, принимаемых считывателем 6.
Для удобства некоторые предварительные операции могут быть общими как для этапа предварительной калибровки, так и для этапа считывания и/или записи, например:
• подключение считывателя 6 к блоку 7 обработки и управления путем выбора надлежащего порта/интерфейса связи (например, Ethernet, последовательного интерфейса, USB, Wi-Fi и т.д.);
• выбор считывателя 6 (если используется несколько считывателей 6) и включение его антенны 2 (или его антенны 2, если множество антенн 2 подключено к одному/каждому считывателю 6);
• определение конкретных способов опроса с точки зрения рабочей частоты, частоты опроса (то есть количества опросов в секунду (или в другую единицу времени)) и излучаемой мощности.
Для удобства, в начале обмена данными между считывателем и меткой, считыватель 6 активирует RFID-метку 5, проходящую под антенной 2, путем отправки непрерывного сигнала. Затем активированная RFID-метка 5 принимает команды от считывателя 6 и, наконец, отправляет обратно данные (то есть однозначный идентификатор и/или дополнительные данные, связанные с шиной) посредством модуляции обратного рассеянного непрерывного сигнала, принятого из RFID-шлюза 1. Мощности обратно рассеянного и переданного сигналов измеряются с помощью индикаторов мощности принимаемого сигнала (RSSI) на стороне считывателя (RSSIR, по амплитуде и фазе) и на стороне RFID-метки (RSSIT, по амплитуде и фазе).
Для лучшего понимания этапа предварительной калибровки ниже будет подробно описан его предпочтительный (хотя и неограничивающий) вариант осуществления.
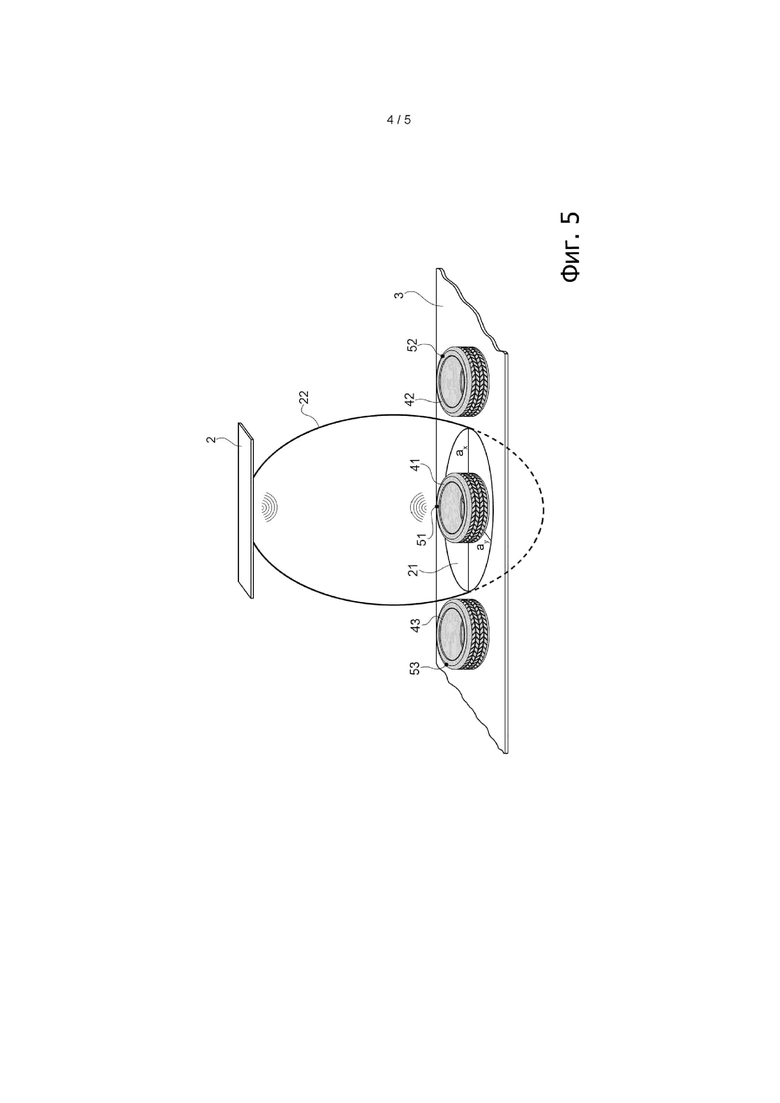
В этой связи на фиг.5 схематично показан пример сценария выполнения предварительной калибровки считывателя 6.
В частности, как показано на фиг.5, шина 41, снабженная RFID-меткой 51, для удобства размещается на конвейерной ленте 3 прямо под антенной 2, и минимальная мощность (Pmin), которую считыватель 6 должен излучать через антенну 2 для активации RFID-метки 51, определяется удобным образом (предпочтительно путем выполнения процедуры измерения мощности при включении).
Далее, значение мощности передачи PTX = Pmin + Psm, где Psm обозначает запас по надежности (например, равный 3 дБ), для удобства устанавливается для обеспечения достаточно надежной связи между считывателем 6 и RFID-меткой 51 независимо от положения RFID-метки 51 в/на шине 41 (полярная ориентация).
Упомянутая мощность передачи PTX затем используется для передачи радиочастотных сигналов из антенны 2, в то время как значения RSSI измеряются как на стороне RFID-метки, так и на стороне считывателя (RSSIT, RSSIR) как по амплитуде/модулю, так и по фазе.
Затем размер зоны 21 покрытия антенны 2 на конвейерной ленте 3 (то есть зона, в которой существует максимальная вероятность того, что RFID-метка 51 будет обнаружена) может быть экспериментально определен путем постепенного перемещения шины 41 назад и вперед (вручную или с помощью конвейерной ленты 3) из исходного положения до тех пор, пока RFID-метка 51 не перестанет реагировать. В этой связи следует отметить, что размер зоны покрытия обычно зависит от конкретной используемой конфигурации (например, мощности передачи PTX, ширины луча антенны, типа конвейерной ленты и т.д.).
Чтобы уменьшить многочисленные отклики от RFID-меток 51, 52, 53 соседних шин 41, 42, 43, можно для удобства разнести надлежащим образом соседние шины 41, 42, 43 на конвейерной ленте 3, чтобы только одна шина 41/42/43 находилась одновременно в пределах определенной зоны 21 покрытия (например, предполагая, что объем 22 считывания имеет приблизительно форму эллипсоида, минимальное расстояние dmin между соседними шинами 41, 42, 43 может быть для удобства принято больше, чем большая полуось ax/2 зоны 21 покрытия, параллельная направлению транспортировки шин 41, 42, 43 на конвейерной ленте 3).
Для получения дополнительной информации относительно RFID-метки можно сослаться, например, на документ G. Casati et al., “The Interrogation Footprint of RFID-UAV: Electromagnetic Modeling and Experimentations”, IEEE Journal of Radio Frequency Identification, Volume 1, Issue 2, pages 155-162, 25 October 2017.
Для удобства, чтобы учесть изменчивость настройки, вышеупомянутая процедура повторяется N раз (например, по меньшей мере три раза) с разными шинами 41, 42, 43 для определения среднего значения мощности передачи PTX-av, средних значений RSSI RSSIT-av, RSSIR-av (амплитуда и фаза) и среднего размера зоны 21 покрытия.
Таким образом, в конце этапа предварительной калибровки значение мощности передачи, которое будет использоваться для выполнения этапа считывания и/или записи, устанавливается равным PTX-av, тогда как средние значения RSSI RSSIT-av, RSSIR-av используются для установки одного или нескольких пороговых значений, которые будут использоваться для обнаружения транспортируемых шин и для различения между/среди нескольких считанных показаний (например, из-за недостаточного разнесения шин, нескольких шин на соседних конвейерных лентах, явления случайного многолучевого распространения и т.д.).
Различные варианты вычисления пороговых значений могут быть для удобства приняты на основе средних значений RSSI RSSIT-av, RSSIR-av и в зависимости от различных факторов, таких как конкретная используемая конфигурация (то есть мощность передачи PTX, ширина луча антенны, тип конвейерной ленты и т.д.). Например, можно вычислить:
• одно общее пороговое значение, которое должно использоваться при всех измерениях RSSI; или
• пороговое значение амплитуды для всех измерений амплитуды RSSI и/или пороговое значение фазы для всех измерений фазы RSSI; или даже
• четыре пороговых значения, а именно первое пороговое значение амплитуды и первое пороговое значение фазы для измерений, соответственно, амплитуды и фазы RSSI, выполняемых на стороне RFID-метки, и второе пороговое значение амплитуды и второе пороговое значение фазы для измерений, соответственно, амплитуды RSSI и фазы на стороне считывателя.
Окончательный выбор в отношении вычисления порогового значения для конкретной конфигурации/установки может быть для удобства сделан на основе оценок, выполненных на этапе предварительной калибровки, который выполняется для такой конкретной конфигурации/установки.
Более того, на этапе предварительной калибровки можно также определить частоту опроса, которая будет использоваться для обнаружения транспортируемых шин. Фактически, зная заданный средний размер ax зоны покрытия вдоль направления транспортировки шин на конвейерной ленте (например, большой оси эллиптической зоны 21 покрытия, показанной на фиг.5) и скорость vx перемещаемых шин (которую можно с полным основанием считать постоянной), можно определить время tx, необходимое для того, чтобы шина попала полностью в зону покрытия, или, что то же самое, время, в течение которого шина находится в зоне покрытия. Таким образом, частота опроса, которая будет использоваться считывателем 6 для обнаружения транспортируемых шин, может быть для удобства определена таким образом, чтобы иметь по меньшей мере один опрос в течение времени tx.
Кроме того, для лучшего понимания этапа считывания и/или записи ниже будет подробно описан предпочтительный (хотя и неограничивающий) вариант осуществления операций обнаружения шины, выполняемых на упомянутом этапе считывания и/или записи.
Для удобства, во время нормального функционирования, считыватель 6 непрерывно передает команды "считывания" через антенну 2, используя в качестве значения мощности передачи среднее значение мощности передачи PTX-av, определенное на этапе предварительной калибровки, причем PTX-av является такой, чтобы можно было считать только одну RFID-метку, проходящую под антенной.
Кроме того, пороговые значения, вычисленные на основе средних значений RSSI RSSIT-av, RSSIR-av на этапе предварительной калибровки, используются для обнаружения RFID-меток, проходящих под антенной 2, и для различения между многочисленными показаниями считывания (что, как объяснялось ранее, может быть связано с недостаточным расстоянием между соседними шинами на одной и той же конвейерной ленте, или наличием нескольких шин на соседних конвейерных лентах, или явлением стохастического многолучевого распространения и т.д.).
Для удобства обнаружение RFID-метки может быть, в общем, выражено следующим образом:
• если RSSIR/T-m ≥ RSSIth, то обнаруживается RFID-метка (и, следовательно, шина), или,
• если RSSIR/T-m < RSSIth, то RFID-метка/шина не обнаруживается (например, это может быть до/после антенны 2 на одной и той же конвейерной ленте 3 или на соседней конвейерной ленте),
где RSSIR/T-m обозначает одно или более значений амплитуды и/или фазы RSSI, измеренных на стороне(ах) считывателя и/или RFID-метки, и RSSIth обозначает одно или более пороговых значений, определенных, как объяснено ранее, на этапе предварительной калибровки на основе средних значений RSSI RSSIT-av, RSSIR-av.
Для удобства одно или более пороговых значений RSSIth могут также изменяться динамически и в реальном времени, чтобы адаптировать обнаружение к конкретной установке и/или окружающей обстановке (например, путем добавления значения смещения для повышения устойчивости/надежности обнаружения).
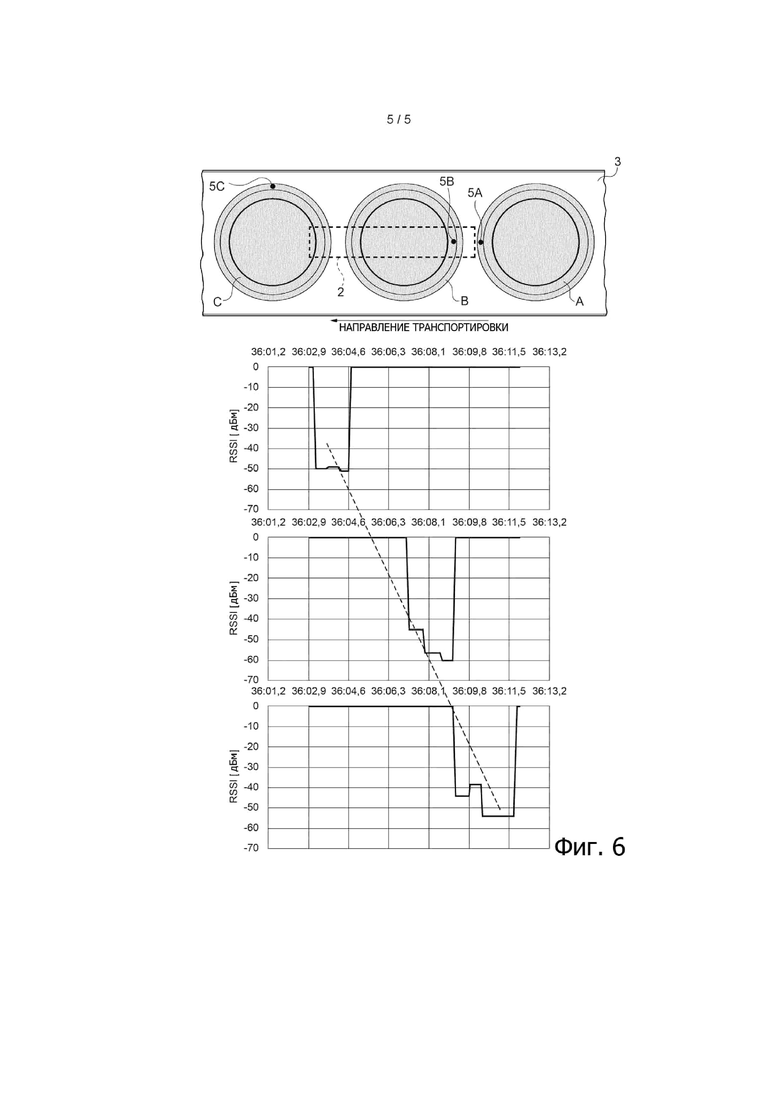
Для удобства надлежащая обработка изменения во времени одного или более значений RSSIR/T-m позволяет также контролировать/отслеживать последовательность транспортируемых шин, как показано на фиг.6, которая схематично иллюстрирует:
• сверху, последовательность из трех транспортируемых шин A, B, C, каждая из которых снабжена соответствующей RFID-меткой 5A/5B/5C; и,
• снизу, соответствующие значения RSSI, измеренные с течением времени (при условии, что шины A, B, C движутся со скоростью 1 м/с и разнесены друг от друга на 100 см, и что используется мощность считывания 30 дБм).
После прочтения вышеизложенного описания специалистам в данной области техники сразу станут очевидными технические преимущества и инновационные признаки настоящего изобретения.
В частности, важно отметить, что настоящее изобретение обеспечивает, в общем, превосходную производительность считывания/записи на основе RFID и, в частности, однозначное обнаружение RFID-меток с повышенной производительностью по сравнению с известными в настоящее время решениями.
Таким образом, настоящее изобретение может быть преимущественно использовано для приложений автоматического управления, контроля и отслеживания при производстве, сортировке и утилизации (интеллектуальных) шин, где используются конвейерные ленты.
Более того, настоящее изобретение позволяет реализовать базы данных для инвентаризации шин, в которых хранятся важные данные, относящиеся к каждой произведенной шине, и которые доступны (например, через Интернет) для соответствующих заинтересованных сторон (например, производственных операторов, логистических операторов, дилеров, клиентов и т.д.).
В заключение, ясно, что в настоящее изобретение могут быть внесены многочисленные модификации и варианты, каждые из которых попадают в объем изобретения, как определено в прилагаемой формуле изобретения. В этой связи следует отметить, что, хотя изобретение было описано ранее с конкретной ссылкой на антенну, расположенную над конвейерной лентой, идеи настоящего изобретения могут быть немедленно применены, с необходимыми изменениями, к различным пространственным конфигурациям/расположениям антенны по отношению к конвейеру. Например, антенну можно для удобства установить вдоль бокового края конвейерной ленты, рядом с упомянутой конвейерной лентой или в непосредственной близости от нее, и она может продолжаться перпендикулярно или под наклоном к плоскости конвейерной ленты (то есть к вышеупомянутой базовой плоскости xy) и параллельно направлению транспортировки. В более общем случае, антенна может быть расположена рядом с конвейерной лентой, при этом имея такую диаграмму направленности, которая приводила бы к зоне покрытия, покрывающей всю ширину конвейерной ленты в направлении, перпендикулярном направлению транспортировки, и ограниченную длину в направлении, параллельном упомянутому направлению транспортировки (для удобства она должна быть плоской и иметь заданную длину в направлении, параллельном направлению транспортировки, и заданную ширину в направлении, перпендикулярном упомянутому направлению транспортировки, причем заданная длина больше, чем упомянутая заданная ширина).



Изобретение относится к автомобильной промышленности. Каждая шина (4, A, B, C) снабжена соответствующей RFID-меткой (5, 5A, 5B, 5C), хранящей однозначный идентификатор упомянутой шины (4, A, B, C). Способ содержит предоставление: антенны (2), установленной над или рядом с конвейерной лентой (3) и выполненной с возможностью излучения радиочастотных сигналов в направлении зоны (21) покрытия на конвейерной ленте (3) и приема обратно рассеянных радиочастотных сигналов из упомянутой зоны (21) покрытия; и считывателя (6), подключенного к антенне (2), чтобы управлять последней при передаче и приеме. Способ включает применение инновационного этапа предварительной калибровки к считывателю (6) и затем выполнение этапа считывания и/или записи при работе калиброванного считывателя (6). Технический результат - повышение производительности считывания, обнаружения RFID - меток. 2 н. и 7 з.п. ф-лы, 6 ил.
1. Способ считывания и/или записи данных с/на метки радиочастотной идентификации (5, 5A, 5B, 5C) шин (4, A, B, C), транспортируемых на конвейерной ленте (3) в направлении транспортировки, причем каждая шина (4, A, B, C) снабжена соответствующей меткой радиочастотной идентификации (5, 5A, 5B, 5C), хранящей однозначный идентификатор упомянутой шины (4, A, B, C), указанный способ характеризуется тем, что предоставляют:
антенну (2), устанавливаемую над или рядом с конвейерной лентой (3) и выполненную с возможностью:
излучения радиочастотных сигналов в направлении зоны (21) покрытия на конвейерной ленте (3), и
приема обратно рассеянных радиочастотных сигналов из упомянутой зоны (21) покрытия; и
считыватель (6), подключаемый к антенне (2) для управления антенной при передаче и приеме;
причем способ содержит также этап предварительной калибровки, включающий в себя калибровку считывателя (6), при которой:
a1) размещают заданную шину (41), снабженную заданной меткой (51) радиочастотной идентификации, на конвейерной ленте (3) и удерживают упомянутую заданную шину (41) в неподвижном состоянии под/рядом с антенной (2);
a2) когда заданная шина (41) остается неподвижной под/рядом с антенной (2),
определяют минимальную мощность передачи, необходимую для активации заданной метки (51) радиочастотной идентификации,
определяют калибровочную мощность передачи выше, чем упомянутая минимальная мощность передачи, и
излучают, через антенну (2), калибровочные радиочастотные сигналы с упомянутой калибровочной мощностью передачи и принимают, через упомянутую антенну (2), обратно рассеянные калибровочные радиочастотные сигналы от заданной метки (51) радиочастотной идентификации;
а3) при продолжении излучения калибровочных радиочастотных сигналов и приема обратно рассеянных калибровочных радиочастотных сигналов, постепенно перемещают заданную шину (41) вперед и назад по конвейерной ленте (3) до тех пор, пока заданная метка (51) радиочастотной идентификации не перестанет реагировать;
a4) оценивают размер (ах) зоны (21) покрытия в направлении, параллельном направлению транспортировки, на основе операции a3);
а5) измеряют
первые уровни принятой мощности калибровочных радиочастотных сигналов, принятых заданной меткой (51) радиочастотной идентификации, когда заданная шина (41) остается неподвижной под/рядом с антенной (2), и когда упомянутую заданную шину (41) перемещают назад и вперед, и
вторые уровни принятой мощности обратно рассеянных калибровочных радиочастотных сигналов, принятых считывателем (6) через антенну (2), когда заданная шина (41) остается неподвижной под/рядом с антенной (2), и когда упомянутую заданную шину (41) перемещают вперед и назад;
а6) повторяют операции а1) - а5) с разными шинами (41, 42, 43), тем самым получая вследствие этого:
множество калибровочных мощностей передачи, относящихся к разным шинам (41, 42, 43),
множество оценочных размеров (ах) зоны (21) покрытия, относящейся к различным шинам (41, 42, 43), и
множество первых и вторых уровней принимаемой мощности, относящихся к разным шинам (41, 42, 43); и
а7) вычисляют
среднюю мощность передачи на основе полученных калибровочных мощностей передачи,
средний размер зоны (21) покрытия на основе всех полученных оценочных размеров (ах),
частоту опроса на основе среднего размера зоны (21) покрытия и заданной скорости транспортировки конвейерной ленты (3),
средние уровни принимаемой мощности на основе полученных первого и второго уровней принимаемой мощности, и
одно или более пороговых значений на основе средних уровней принимаемой мощности;
при этом способ содержит выполнение этапа считывания и/или записи, который включает в себя функционирование откалиброванного считывателя (6) таким образом, что:
b1) излучают, через антенну (2), один или более радиочастотных сигналов опроса со средней мощностью передачи и частотой опроса, вычисленных на этапе предварительной калибровки;
b2) принимают, через антенну (2), один или более обратно рассеянных радиочастотных сигналов опроса от метки радиочастотной идентификации (5, 5A, 5B, 5C) шины (4, A, B, C), проходящей через зону (21) покрытия, в которой один или более упомянутых обратно рассеянных радиочастотных сигналов опроса несут однозначный идентификатор транспортируемой шины (4, A, B, C);
b3) измеряют
один или более третьих принимаемых уровней мощности одного или более радиочастотных сигналов опроса, принимаемых меткой радиочастотной идентификации (5, 5A, 5B, 5C) транспортируемой шины (4, A, B, C), и
один или более четвертых принимаемых уровней мощности обратно рассеянного радиочастотного сигнала опроса, принимаемого считывателем (6) через антенну (2);
b4) обнаруживают транспортируемую шину (4, A, B, C) путем сравнения третьего и четвертого уровней принимаемой мощности с одним или более пороговыми значениями, вычисленными на этапе предварительной калибровки; и
b5) идентифицируют обнаруженную транспортируемую шину (4, A, B, C) на основе однозначного идентификатора, переносимого обратно рассеянными радиочастотными сигналами опроса.
2. Способ по п.1, в котором этап считывания и/или записи включает в себя функционирование откалиброванного считывателя (6) также для:
b6) считывания и/или записи данных, связанных с шиной, с/на метку радиочастотной идентификации (5, 5A, 5B, 5C) транспортируемой шины (4, A, B, C).
3. Способ по п.1 или 2, в котором антенна (2) выполнена с возможностью иметь диаграмму направленности такую, которая приводит к зоне (21) покрытия, покрывающей:
всю ширину конвейерной ленты (3) в направлении, перпендикулярном направлению транспортировки; и
ограниченную длину в направлении, параллельном упомянутому направлению транспортировки.
4. Способ по любому из пп.1-3, в котором антенна (2) является плоской, расположена параллельно конвейерной ленте (3) и имеет заданную длину (L) в направлении, параллельном направлению транспортировки, и заданную ширину (W) в направлении, перпендикулярном упомянутому направлению транспортировки, причем заданная длина (L) больше заданной ширины (W).
5. Способ по любому из предыдущих пунктов, в котором первый, второй, третий и четвертый уровни принимаемой мощности указывают на измерения амплитуды и фазы принятой мощности.
6. Система (1) для считывания и/или записи данных с/на метки радиочастотной идентификации (5, 5A, 5B, 5C) шин (4, A, B, C), транспортируемых на конвейерной ленте (3) в направлении транспортировки, причем каждая шина (4, A, B, C) снабжена соответствующей меткой радиочастотной идентификации (5, 5A, 5B, 5C), хранящей однозначный идентификатор упомянутой шины (4, A, B, C), при этом система (1) содержит:
антенну (2), установленную над или рядом с конвейерной лентой (3) и выполненную с возможностью
излучения радиочастотных сигналов в направлении зоны (21) покрытия на конвейерной ленте (3) и
приема радиочастотных сигналов, обратно рассеянных метками радиочастотной идентификации (5, 51, 52, 53, 5A, 5B, 5C) шин (4, 41, 42, 43, A, B, C), проходящих через упомянутую зону (21) покрытия; и
считыватель (6), подключенный к антенне (2), для управления последней при передаче и приеме антенны;
при этом считыватель (6) выполнен с возможностью выполнения этапа предварительной калибровки и после калибровки способен выполнять этап считывания и/или записи способа по любому из предыдущих пунктов.
7. Система по п.6, в которой антенна (2) выполнена с возможностью иметь диаграмму направленности, которая приводит к зоне (21) покрытия, покрывающей:
всю ширину конвейерной ленты (3) в направлении, перпендикулярном направлению транспортировки; и
ограниченную длину в направлении, параллельном упомянутому направлению транспортировки.
8. Система по п.6 или 7, в которой антенна (2) является плоской, расположена параллельно конвейерной ленте (3) и имеет заданную длину (L) в направлении, параллельном направлению транспортировки, и заданную ширину (W) в направлении, перпендикулярном упомянутому направлению транспортировки, причем заданная длина (L) больше заданной ширины (W).
9. Система по любому из пп.6-8, содержащая множество антенн (2), которые:
установлены в разных положениях вдоль конвейерной ленты (3);
выполнены, каждая, с возможностью излучения радиочастотных сигналов в направлении соответствующей зоны (21) покрытия на конвейерной ленте (3) и приема обратно рассеянных радиочастотных сигналов из нее; и
подключены к считывателю (6) с возможностью функционирования в режимах передачи и приема;
при этом положение каждой обнаруженной шины (4, A, B, C) определяется считывателем (6) или электронным блоком (7) управления, подключенным к нему или интегрированным/встроенным в него, на основе антенны (2), которая приняла обратно рассеянный радиочастотный сигнал опроса, на основе которого обнаружена упомянутая шина (4, A, B, C).
| WO 2016095922 A1, 23.06.2016 | |||
| DE 202017102186 U1, 05.05.2017 | |||
| Способ цистэктомии челюстей | 1990 |
|
SU1792658A1 |

