ОБЛАСТЬ ТЕХНИКИ
Изобретение касается управления входным сигналом с широтно-импульсной модуляцией, подаваемым на драйвер для управления нагрузкой.
УРОВЕНЬ ТЕХНИКИ
Широтно-импульсная модуляция (PWM) - технология для управления мощностью, подводимой к нагрузке. Контроллер, такой как микропроцессор, формирует периодический управляющий сигнал, который модулирован так, что в каждый период времени сигнал активирован в течение определенного времени (время включенного состояния) и деактивирован в течение остального периода времени (время выключенного состояния). Понятие «коэффициент заполнения» относится к отношению времени включенного состояния к периоду модуляции (или, в более общем смысле, отношению времени включенного состояния к периоду или времени выключенного состояния). Следует отметить, что понятия «включенное» (ʺonʺ) и «выключенное» (ʺoffʺ) могут быть номинальными - они могут означать либо «полностью включенное» и «полностью выключенное», либо переключение между высоким и низким уровнями относительно «фонового» уровня постоянной составляющей.
Контроллер подает этот управляющий сигнал с широтно-импульсной модуляцией на вход драйвера, такого как понижающий преобразователь, или драйвера другого типа, который управляет нагрузкой на основе модуляции управляющего сигнала. В течение времени включенного состояния каждого периода драйвер подает ток от источника питания на нагрузку, в то время как в течение времени выключенного состояния каждого периода драйвер не подает ток от источника питания на нагрузку. Следовательно, средняя мощность, подаваемая на нагрузку, зависит от коэффициента заполнения: больший коэффициент заполнения подразумевает, что ток подается в течение большего времени, а значит, средняя мощность выше; в то время как, наоборот, меньший коэффициент заполнения подразумевает, что ток подается в течение меньшего времени, а значит, средняя мощность ниже.
Путем управления коэффициентом заполнения (т.е. изменяя время включенного состояния относительно PWM-периода или времени выключенного состояния), контроллер, таким образом, может управлять средней мощностью, которая управляет нагрузкой.
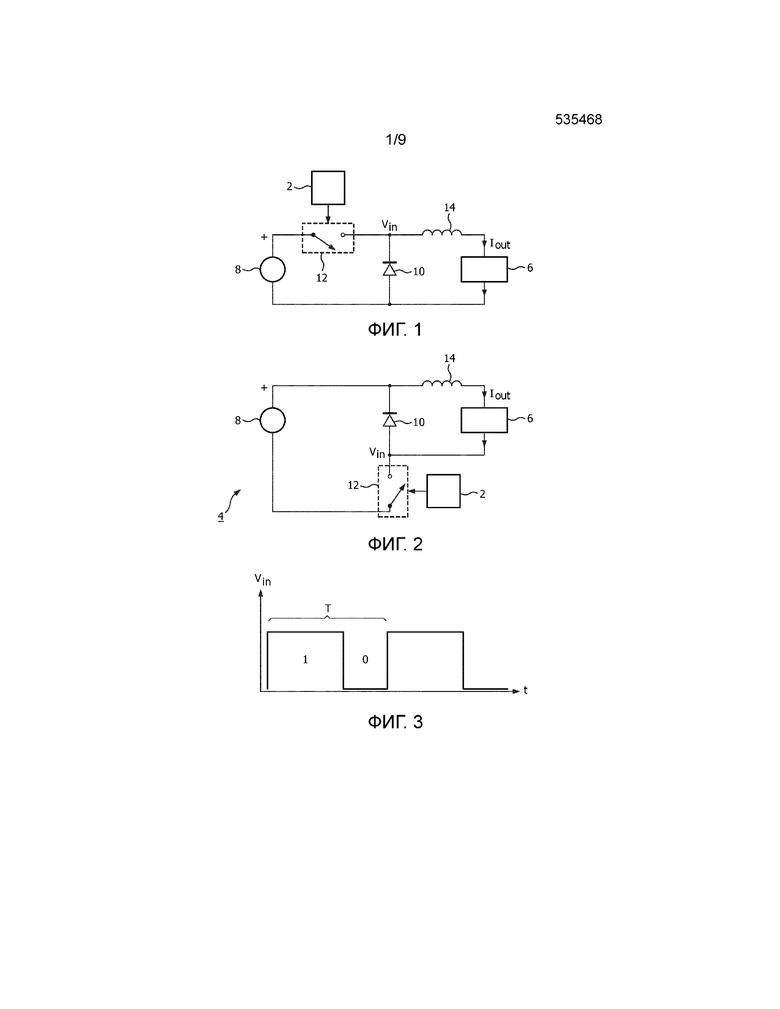
На Фигуре 1 показана блок-схема цепи, содержащей обычный понижающий преобразователь 4, используемый с целью управления мощностью, подаваемой на нагрузку, на основе широтно-импульсной модуляции. Наряду с понижающим преобразователем 4 электрическая цепь содержит источник 8 питания, нагрузку 6 и контроллер 2, например соответствующим образом запрограммированный микропроцессор. Понижающий преобразователь 4 содержит переключатель 12, а также катушку 14 индуктивности и диод 10. Переключатель 12 имеет первый контакт, соединенный со второй клеммой источника 8 питания (например, положительной клеммой), а также второй контакт, соединенный с первой клеммой катушки 14 индуктивности. Катушка 14 индуктивности имеет вторую клемму, соединенную с первой клеммой нагрузки 6, при этом нагрузка 6 имеет вторую клемму, соединенную с первой клеммой источника 8 питания. Диод 10 имеет катод, соединенный с первой клеммой катушки 8 индуктивности (и вторым контактом переключателя 12), и анод, соединенный со второй клеммой нагрузки 6 (и первой клеммой источника 8 питания). Переключатель 12 и источник 8 питания, таким образом, соединены последовательно друг с другом, а также катушка 14 индуктивности и нагрузка соединены последовательно друг с другом, при этом последовательное соединение катушки 14 индуктивности и нагрузки 6 соединено параллельно по отношению к последовательному соединению источника 8 питания и переключателя 12, причем диод 10 также соединен параллельно по отношению к последовательному соединению источника 8 питания и переключателя 12 (с обратным смещением от источника 8 питания).
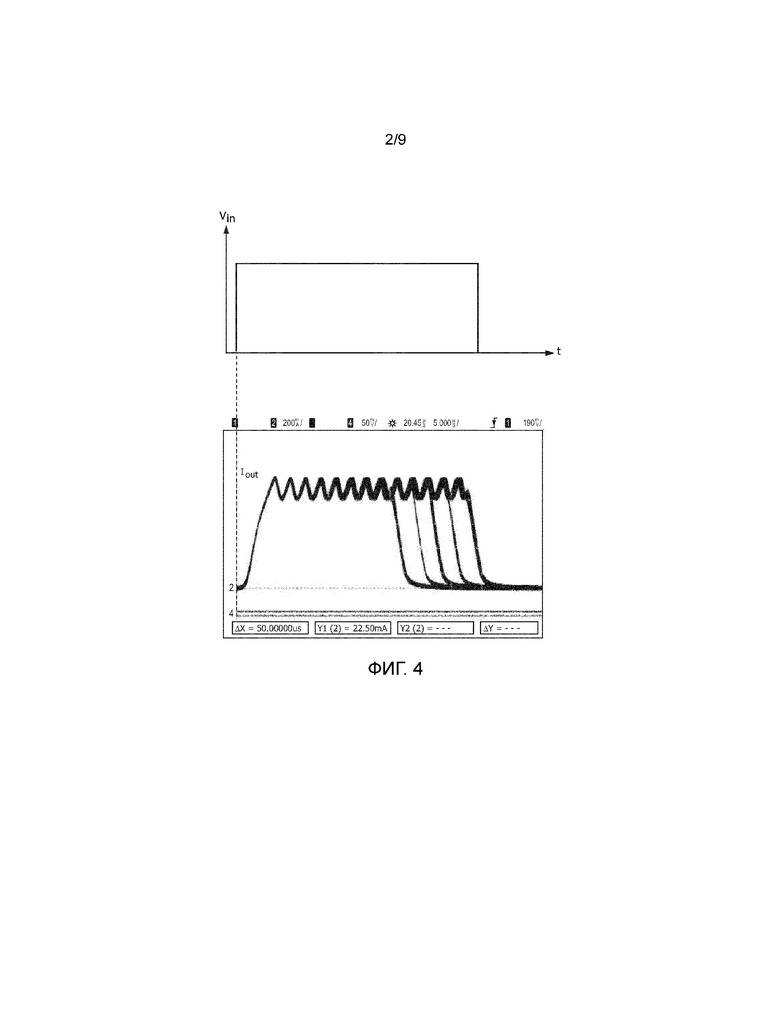
Следует отметить, что на Фигуре 1 показан понижающий преобразователь с переключателем верхнего плеча. Альтернативная схема с переключателем нижнего плеча показана на Фигуре 2. Электрическая цепь та же, за исключением того что переключатель 12 подсоединен между другой (первой) клеммой источника питания и второй клеммой нагрузки 6 (и анодом диода 10), при этом вторая (например, положительная) клемма источника 8 питания соединена с первой клеммой катушки 8 индуктивности (и катодом диода 8).
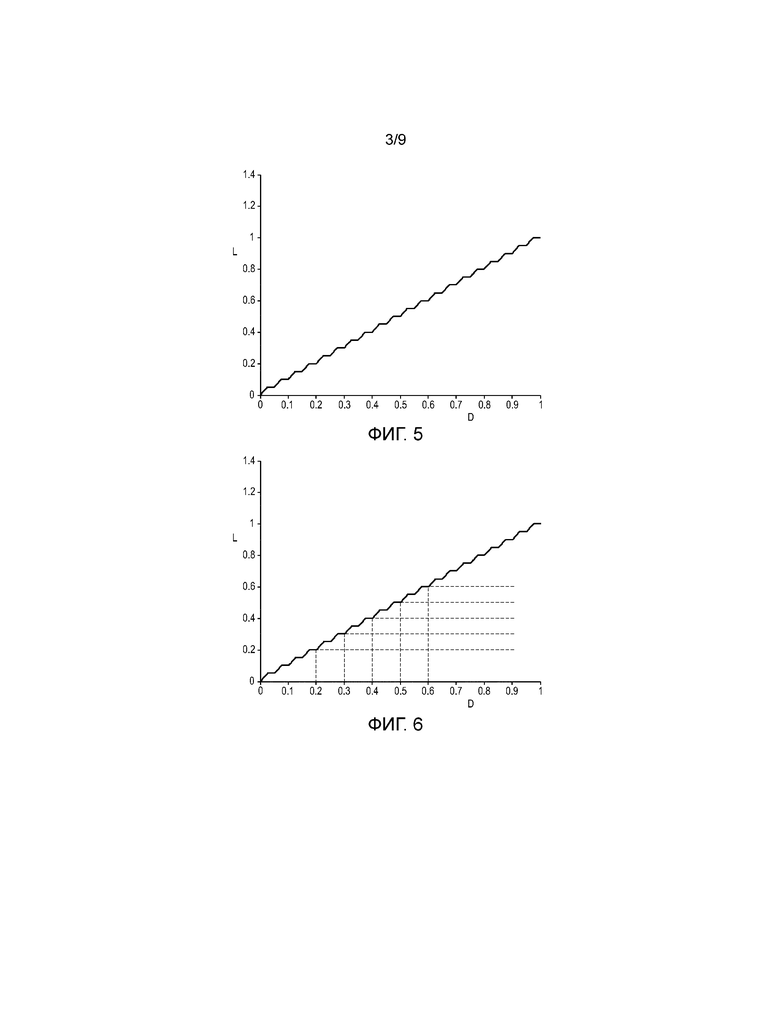
В каждом из вариантов контроллер 2 выполнен с возможностью подачи управляющего сигнала с широтно-импульсной модуляцией на вход переключателя 12, тем самым формируя входной сигнал с широтно-импульсной модуляцией в виде сигнала напряжения Vin. Когда управляющий сигнал присутствует (активирован, например, имеет логический уровень 1), переключатель 12 закрывается, соединяя точку входного напряжения Vin с источником 8. Когда управляющий сигнал отсутствует (деактивирован, например, имеет логический уровень 0), переключатель 12 открывается и точка Vin отсоединяется от источника 8. Как показано на Фигуре 3, это приводит к созданию прямоугольного сигнала входного напряжения Vin с широтно-импульсной модуляцией, соответствующего управляющему сигналу с широтно-импульсной модуляцией, сформированному контроллером 2. Данный прямоугольный входной сигнал PWM присутствует на аноде диода 10 в случае переключателя верхнего плеча (Фигура 1) или на катоде в случае переключателя нижнего плеча (Фигура 2). В течение времени включенного состояния, когда точка Vin соединена с источником 8, ток может протекать от источника питания 8 через катушку 14 индуктивности и нагрузку 6. В течение времени выключенного состояния, когда точка Vin отсоединена от источника питания, ток не подается от источника питания 8 на катушку 14 индуктивности и нагрузку 6 (хотя некоторый ток может временно протекать через нагрузку 6 от катушки 14 индуктивности, когда катушка индуктивности развозбуждается).
Следует, однако, отметить, что понижающий преобразователь представляет собой лишь один пример. Вообще для драйверов светодиодных ламп и других ламп могут также использоваться другие импульсные источники питания, например обратноходовой преобразователь.
Контроллер 2 управляет коэффициентом заполнения широтно-импульсной модуляции, чтобы регулировать ток или мощность, подаваемые на нагрузку, а значит, и ее выход. Ток является тем параметром, который регулируется в случае LED-драйверов, однако поскольку падение напряжения на LED является практически постоянным, он (практически) пропорционален мощности. Например, в случае светового источника широтно-импульсная модуляция управляет выходной мощностью или интенсивностью излучаемого света, а в случае двигателя она управляет его числом оборотов. Во многих современных LED-драйверах используются понижающие преобразователи для управления током посредством LED и, таким образом, уровнем света, излучаемого LED. Частота PWM-сигнала обычно составляет величину порядка 4-16 кГц. Современные кодированные световые контроллеры могут также кодировать данные в PWM-сигнал, изменяя его коэффициент заполнения, чтобы создать амплитудную модуляцию без постоянной составляющей тока в видимом свете, излучаемом LED.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
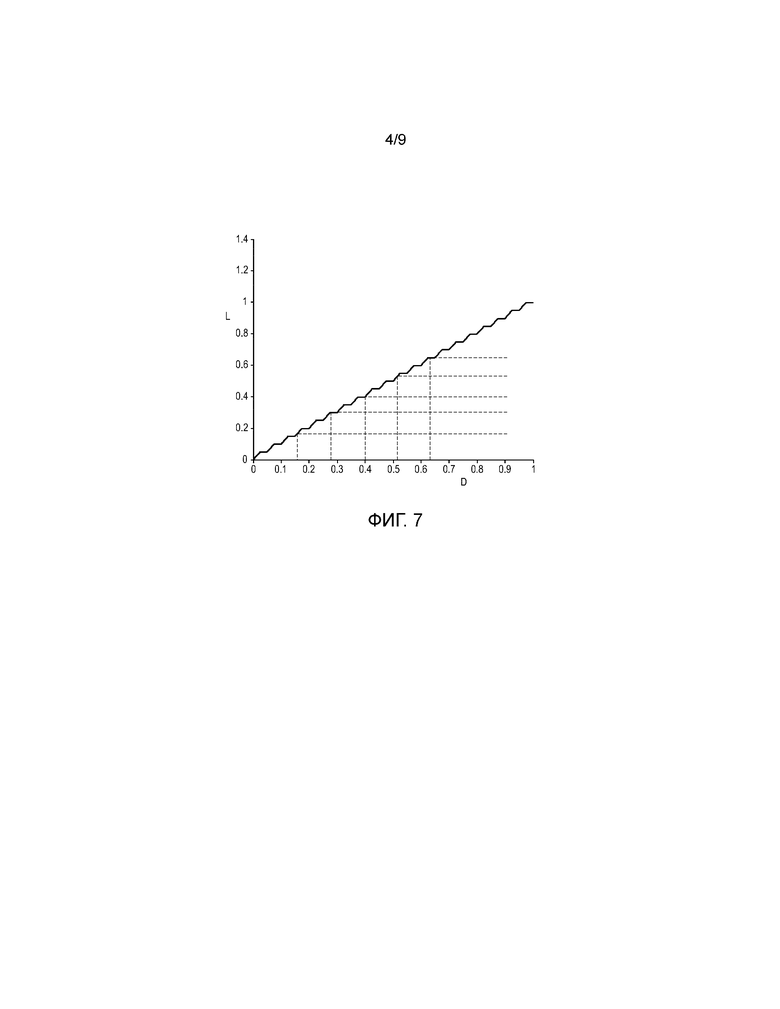
Однако, как отмечено выше, управляющий сигнал с широтно-импульсной модуляцией не прикладывается напрямую к нагрузке, а поступает через драйвер, такой как понижающий преобразователь. В выключенном состоянии в каждый период PWM-сигнала понижающий преобразователь не подает ток на LED, однако во включенном состоянии понижающий преобразователь обычно принудительно направляет ʺпакеты импульсов токаʺ с высокой частотой (обычно от 100 до 800 кГц) на вторичную сторону своей катушки, а значит, на LED. В настоящем описании ее можно назвать ʺчастотой переключения понижающего преобразователяʺ (чтобы отличить от частоты PWM). См., например, Фигуру 4.
Сочетание переключений на этих двух разных частотах может вызывать вопросы. В зависимости от того, совпадает фронт переключения PWM-сигнала с нарастающим или убывающим фронтом второй, более высокой частоты, зависимость между коэффициентом заполнения PWM-сигнала и током, подаваемым на нагрузку, не обязательно будет полностью линейной. Например, если убывающий фронт PWM-входного сигнала Vin совпадает с убывающим фронтом одного из ʺколебанийʺ более высокой частоты понижающего преобразователя, точное время переключения PWM-входного сигнала Vin не будет влиять на ток Iout, подаваемый на нагрузку, так что зависимость между коэффициентом заполнения и током нагрузки не будет линейной.
В том случае, когда нагрузка представляет собой световой источник, такой как LED, авторы изобретения осознали, что в результате данной нелинейности определенные комбинации частоты переключения понижающего преобразователя и PWM-коэффициента заполнения привнесут заметное мерцание в световое излучение, испускаемое LED, несмотря на кодировку без постоянной составляющей тока PWM-сигнала, формируемого контроллером 2. Если брать шире, другие виды драйверов для управления другими нагрузками могут также испытывать действие высокочастотных колебаний или гармоник, при этом взаимодействие между такими частотами и частотой PWM может также приводить к нежелательным эффектам, таким как нелинейность. На практике может оказаться сложным или даже невозможным избежать таких комбинаций частот. Таким образом, может потребоваться найти более надежное решение.
Согласно одному аспекту, раскрытому в настоящем описании, создана электрическая цепь, содержащая: контроллер для управления входным сигналом с широтно-импульсной модуляцией, а также драйвер, выполненный с возможностью подачи тока на нагрузку на основе входного сигнала. Будучи подвергнутым широтно-импульсной модуляции, входной сигнал имеет период, содержащий время включенного состояния и время выключенного состояния, причем данный период повторяется с первой частотой; при этом контроллер выполнен с возможностью управления коэффициентом заполнения входного сигнала, сам же коэффициент заполнения представляет собой соотношение между временем включенного состояния и периодом или временем выключенного состояния. На протяжении времени выключенного состояния каждого периода драйвер останавливает подачу тока от источника питания на нагрузку, а на протяжении времени включенного состояния каждого периода драйвер подает ток от источника питания на нагрузку, но со второй частотой, которая превышает первую частоту. На основе данной широтно-импульсной модуляции нагрузка, таким образом, формирует выход на уровне, зависящем от коэффициента заполнения. Кроме того, согласно настоящему раскрытию контроллер выполнен с возможностью ʺподмешивания шумаʺ в коэффициент заполнения. Иными словами, контроллер использует коэффициент заполнения для установки выхода нагрузки на требуемом выходном уровне, но также подмешивает шум в коэффициент заполнения в окрестности точки, соответствующей требуемому выходному уровню.
Подмешивание шума предпочтительно позволяет контроллеру избежать или, по меньшей мере, уменьшить появление нежелательных артефактов в зависимости между коэффициентом заполнения и выходом нагрузки, вызванных взаимодействием между второй частотой (например, частотой переключения понижающего преобразователя) и первой частотой (PWM-частотой).
В предпочтительных вариантах осуществления электрическая цепь дополнительно содержит канал обратной связи от драйвера к контроллеру для измерения второй частоты, при этом контроллер выполнен с возможностью адаптации подмешивания шума в зависимости от второй частоты, измеренной посредством упомянутого канала обратной связи.
В вариантах осуществления контроллер может быть выполнен с возможностью управления коэффициентом заполнения для переключения выхода нагрузки на множество различных выходных уровней, при этом упомянутое подмешивание шума может содержать подмешивание шума в коэффициент заполнения в окрестности каждой из множества точек, соответствующих каждому из упомянутых различных выходных уровней в отдельности.
В вариантах осуществления нагрузка содержит световой источник, а выход содержит свет, излучаемый световым источником. Контроллер может быть выполнен с возможностью управления коэффициентом заполнения для переключения света, излучаемого нагрузкой, на множество различных выходных уровней света. Согласно световым технологиям с кодированием контроллер может быть выполнен с возможностью кодирования сигнала данных в упомянутое световое излучение, используя различные выходные уровни для символов сигнала данных. В таких вариантах осуществления контроллер может быть выполнен с возможностью подмешивания шума в коэффициент заполнения в окрестности каждой из множества точек, соответствующих каждому из различных выходных уровней света в отдельности. В областях применения световых технологий с кодированием, где коэффициент заполнения представляет собой существенно случайную переменную (соответствующую закодированной информации), в вариантах осуществления данное подмешивание шума может уменьшить явление заметного мерцания.
В вариантах осуществления выход нагрузки изменяется в соответствии с зависимостью между коэффициентом заполнения и уровнем выхода, при этом первая и вторая частоты в сочетании могут привести к возникновению созданию паттерна в данной зависимости, который повторяется через регулярные интервалы коэффициента заполнения (см., например, Фигуру 5). Нагрузка может содержать световой источник, а выход может содержать свет, излучаемый световым источником, при этом упомянутая зависимость представляет собой зависимость между коэффициентом заполнения и уровнем упомянутого света.
В вариантах осуществления коэффициент заполнения может подвергаться подмешиванию шума на множестве n дискретных шагов в окрестности упомянутой точки или в окрестности каждой из упомянутых точек. Коэффициент заполнения может подвергаться подмешиванию шума в окрестности упомянутой точки или каждой из упомянутых точек на n шагах P/n, где P - упомянутый интервал. Подмешивание шума может быть случайной величиной, при этом вероятность выбора каждого из n шагов в один период составляет 1/n.
В вариантах осуществления канал обратной связи может содержать делитель напряжения или дифференциальную электрическую цепь.
Согласно другому аспекту, раскрытому в настоящем описании, может быть создан компьютерный программный продукт, содержащий код, реализованный на компьютерно-читаемом носителе и выполненный так, чтобы при выполнении на одном или нескольких процессорах осуществлять операции: обеспечение подачи входного сигнала с широтно-импульсной модуляцией на драйвер, подающий ток на нагрузку на основе входного сигнала, при этом входной сигнал имеет период, содержащий время включенного состояния и время выключенного состояния, причем упомянутый период повторяется с первой частотой, при этом на протяжении времени выключенного состояния каждого периода драйвер останавливает подачу тока от источника питания на нагрузку, а на протяжении времени включенного состояния каждого периода драйвер подает ток от источника питания на нагрузку со второй частотой, превышающей первую частоту; управление коэффициентом заполнения входного сигнала, представляющим собой отношение времени включенного состояния к упомянутому периоду или времени выключенного состояния, с целью установки выхода нагрузки на требуемом выходном уровне; а также подмешивание шума в коэффициент заполнения в окрестности точки, соответствующей требуемому выходному уровню.
В вариантах осуществления компьютерный программный продукт может быть дополнительно выполнен согласно любому из признаков контроллера, раскрытых в настоящем описании.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Чтобы способствовать пониманию настоящего раскрытия и показать, как можно на практике реализовать варианты осуществления, на примере приводятся ссылки на сопроводительные чертежи, где:
на Фиг. 1 показана блок-схема понижающего преобразователя с нагрузкой и контроллером,
на Фиг. 2 показана блок-схема другого понижающего преобразователя с нагрузкой и контроллером,
на Фиг. 3 схематично изображено входное напряжение понижающего преобразователя,
на Фиг. 4 показана временная диаграмма изменения выходного тока понижающего преобразователя,
на Фиг. 5 показан график зависимости выходного уровня от коэффициента заполнения входного сигнала понижающего преобразователя,
на Фиг. 6 показан другой график зависимости выходного уровня от коэффициента заполнения,
на Фиг. 7 показан другой график зависимости выходного уровня от коэффициента заполнения,
на Фиг. 8 показана блок-схема другого понижающего преобразователя с нагрузкой и контроллером,
на Фиг. 9 показана блок-схема другого понижающего преобразователя с нагрузкой и контроллером,
на Фиг. 10 показан другой график зависимости выходного уровня от коэффициента заполнения,
на Фиг. 11 показан другой график зависимости выходного уровня от коэффициента заполнения,
на Фиг. 12 показан график зависимости постоянной составляющей тока на выходе понижающего преобразователя от фазы,
на Фиг. 13 показан другой график зависимости постоянной составляющей тока от фазы,
на Фиг. 14 показан другой график зависимости постоянной составляющей тока от фазы,
на Фиг. 15 показан другой график зависимости постоянной составляющей тока от фазы,
на Фиг. 16 показан другой график зависимости постоянной составляющей тока от фазы,
На Фиг. 17 показан другой график зависимости постоянной составляющей тока от фазы.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Как говорилось ранее, современные драйверы для LED-освещения отличаются нерегулярной (нелинейной) зависимостью между входным PWM-коэффициентом заполнения и сформированным выходным уровнем света. В случае светопередачи с кодированием это может привести к потере особенности отсутствия постоянной составляющей тока системы модуляции, в результате чего возникает заметное мерцание. Как будет подробнее пояснено ниже, обнаружено, что данное мерцание может быть уменьшено до уровня ниже порога зрительного восприятия путем подмешивания шума на входе драйвера.
В современных LED-драйверах часто используются понижающие преобразователи для управления током, протекающим через LED, чтобы получить требуемый световой выход. В случае PWM-управляемого драйвера контроллер 2 (например, соответствующим образом запрограммированный микропроцессор) управляет коэффициентом заполнения PWM (0,1)-сигнала. Частота этого PWM-сигнала обычно составляет величину порядка 4-16 кГц (и даже выше). В ʺ0ʺ-состоянии каждого PWM-периода на LED ток не подается, в то время как в ʺ1ʺ-состоянии понижающий преобразователь обычно принудительно направляет ʺпакеты импульсов токаʺ с высокой частотой (обычно от 100 до 800 кГц) на вторичную сторону своей катушки 14, тем самым возбуждая LED. Эта более высокая ʺчастота переключения понижающего преобразователяʺ зависит от нагрузки через импеданс на входе. Обычно ток на этой второй, значительно более высокой частоте до некоторой степени подвергается низкочастотной фильтрации (конденсатор), перед тем как фактически поступит на нагрузку, но, тем не менее, присутствует. Его частота обычно, по меньшей мере, на порядок (в десять раз) превышает PWM-частоту.
Коэффициент заполнения широтно-импульсной модуляции управляет средним током, подаваемым на LED 6, а значит и уровнем светового выхода, обеспечиваемого LED.
Такая схема может использоваться для формирования кодированного света, при этом данные «встроены» в видимый свет, излучаемый световым источником, таким как LED или матрица LED. Один из способов сделать это заключается в модуляции уровня излучаемого света, что достигается путем изменения входного коэффициента заполнения (а значит, и выходного уровня света) между множеством дискретных значений, чтобы представить различные символы. Например, в одной схеме, разработанной Заявителем и названной «Троичный Манчестер» (ʺTernary Manchesterʺ), используется пять различных уровней для кодирования символов данных. Схема «Ternary Manchester» описана в публикации WO2012052935.
На Фигуре 4 показан выходной ток PWM-управляемого понижающего преобразователя 4. Слева можно видеть установление ʺ1ʺ-состояния в одном PWM-периоде под управлением контроллера 2 (например, микропроцессора). Справа можно видеть переключение в ʺ0ʺ-состояние для пяти различных продолжительностей PWM, соответствующих пяти уровням модуляции кодированного света по схеме ʺТроичный Манчестерʺ. Колебания в верхней части кривой соответствуют более высокой частоте включения/выключения понижающего преобразователя 4 на протяжении ʺ1ʺ-состояния PWM-периода.
На Фигуре 5 показана полученная зависимость между входным коэффициентом заполнения D (создаваемым контроллером 2) и средним выходным уровнем света L LED в терминах тока или мощности, которую можно также назвать передаточной функцией драйвера 4. В отношении LED мощность светового выхода (приблизительно) пропорциональна току (поскольку падение напряжения на LED является практически постоянным). Следует обратить внимание на горизонтальные плато, где средний световой выход не увеличивается с увеличением коэффициента заполнения. Эти плато соответствуют переключению в ʺ0ʺ-состояние PWM-входного сигнала при нахождении на убывающем фронте одного из вызванных понижающим преобразователем ʺколебанийʺ, представленных на Фигуре 4. Когда понижающий преобразователь 4 выключается в условиях убывающего фронта каждого колебания, точное время переключения PWM-входного сигнала в условиях убывающего фронта не влияет на ток, ʺпринудительно подаваемыйʺ на вторичную сторону понижающего преобразователя 4, что создает постоянный световой выход. Данные нарушения (неровности или дефекты) в остальном линейной зависимости повторяются через регулярные интервалы вместе с интервалами повторения коэффициента заполнения, т.е. обладают цикличностью в пространстве коэффициентов заполнения (по шкале коэффициентов заполнения). В примере, представленном на Фигуре 5 (а также на Фигурах 6, 7, 10 и 11), ʺпериодʺ понижающего преобразователя представляет собой интервал, составляющий 0,05 коэффициента заполнения.
При использовании вышеупомянутых LED-драйверов для формирования кодированного света может возникать проблема.
Колебательные сигналы, используемые для кодированного света (фактически отклонений от среднего требуемого освещения), могут быть тщательно подобраны, чтобы не создавать никакого мерцания, т.е. они не содержат низких частот. Обычный пример - «Троичный Манчестер» (зарегистрированный товарный знак), где используется пять различных уровней (в данном случае PWM-коэффициентов заполнения), например, набор {0,2, 0,3, 0,4, 0,5, 0,6}, см. Фигуру 6. Средний уровень света в данном примере равен 0,4. Различные уровни используются последовательно для передачи информации так, что отклонения от 0,4 не имеют низкочастотных составляющих, т.е. они не вызывают мерцания. В примере, представленном на Фигуре 6, можно видеть, что выходные уровни света также разнесены эквидистантно, т.е. равновесный вход приводит также к равновесному выходу. В данном случае это происходит потому, что PWM-частота и уровни коэффициента заполнения были тщательно подобраны, чтобы иметь ровно два ʺпериодаʺ понижающего преобразователя в пространстве коэффициентов заполнения (т.е. два интервала в паттерне на Фигуре 4) между любыми двумя последовательными уровнями. Однако в общем случае это не соответствует действительности.
На Фигуре 7 показан случай, когда используется тот же драйвер 4, имея при этом на 20% более высокую амплитуду модуляции в отношении символов кодированного света, соответствующего схеме «Троичный Манчестер». Следует отметить, что в данном случае эквидистантное разнесение входных PWM-коэффициентов заполнения приводит к неэквидистантному разнесению получаемых выходных уровней света, что, в свою очередь, разрушает особенность отсутствия постоянной составляющей тока кода, т.е. возникает мерцание, поскольку средний уровень света в процессе передачи кодированного света, соответствующего схеме «Троичный Манчестер», не равен среднему уровню света в отсутствие передачи «Троичный Манчестер» (0,4 в примере, представленном на Фигуре 7). Следует понимать, что такие же проблемы могут возникнуть в других схемах кодирования на основе других наборов символов.
Для решения этой проблемы в настоящем раскрытии предложена форма ʺподмешивания шумаʺ, благодаря которой коэффициент заполнения кодированного PWM-сигнала адаптируется в зависимости от частоты переключения понижающего преобразователя. От понижающего преобразователя 4 к контроллеру 2 (например, к микропроцессору) добавляется канал обратной связи, так что контроллер 2 может соответствующим образом адаптировать коэффициент заполнения PWM-сигнала. Тот факт, что соответствие между световым выходом и коэффициентом заполнения носит характер линейной функции с некоторыми периодическими ʺнарушениямиʺ (Фигура 5), делает подход подмешивания шума особенно эффективным.
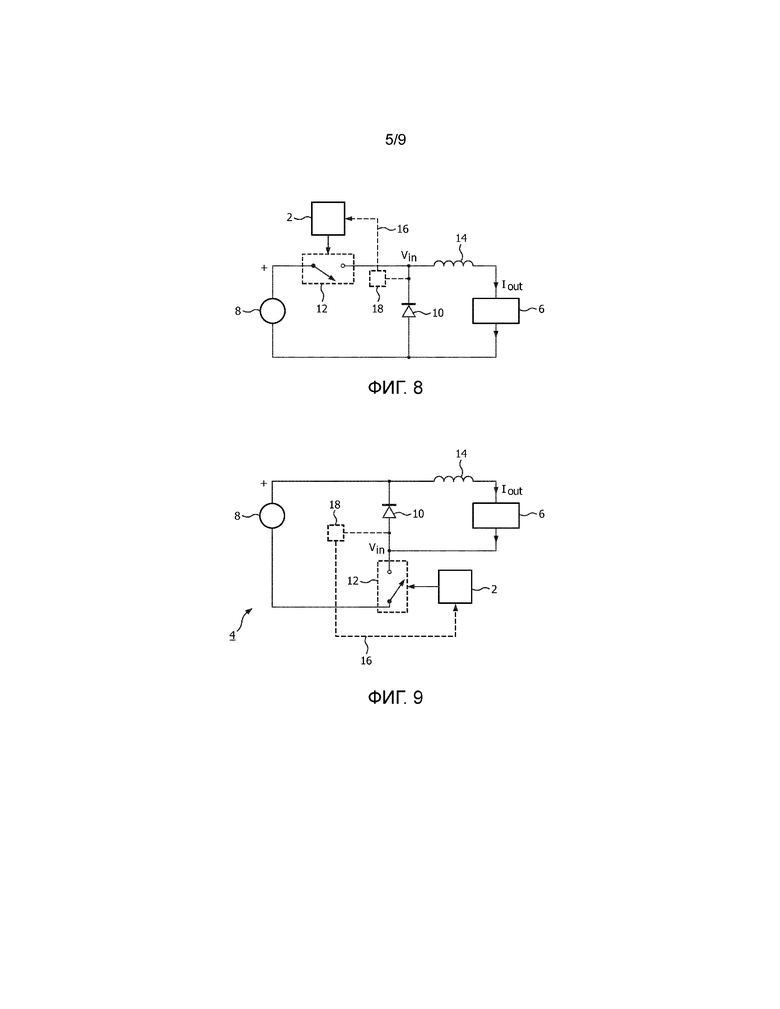
На Фигурах 8 и 9 показаны две схемы реализации понижающего преобразователя, в состав которого входит канал 16 обратной связи. На Фигуре 8 показана схема реализации на основе переключателя верхнего плеча, а на Фигуре 9 показана схема реализации на основе переключателя нижнего плеча, аналогичные соответственно Фигурам 1 и 2, но содержащие канал 16 обратной связи.
На Фигуре 8 (переключатель верхнего плеча) частоту переключения понижающего преобразователя получают путем измерения больших изменений потенциала на катоде диода 10. Следовательно, канал 16 обратной связи соединен между катодом диода 10 и входом контроллера 2.
На Фигуре 9 (переключатель нижнего плеча) для измерения частоты переключения может использоваться напряжение на аноде относительно земли. Следовательно, канал обратной связи соединен между анодом диода 10 и входом контроллера 2.
Канал 16 обратной связи может содержать дополнительную измерительную схему 18 между анодом или катодом диода 10 и микроконтроллером. Это может быть целесообразным в силу больших напряжений (>3,3В), которые могут существовать на аноде или катоде. Например, измерительная схема 18 может представлять собой делитель напряжения, если напряжение источника питания и нагрузки является относительно постоянным, или дифференциальную электрическую цепь, которая также позволяет избежать тока утечки через LED (ток утечки приводит к свечению LED 6, даже когда понижающий преобразователь 4 выключен).
Как будет подробнее показано ниже, подмешивание шума может использоваться для уменьшения локальной нелинейности понижающего преобразователя 4, работающего в гистерезисном токовом режиме, когда выходной ток модулируется путем включения и отключения всего преобразователя, используя широтно-импульсную модуляцию (PWM).
Подмешивание шума осуществляется контроллером 2 на основе обратной связи. Контроллер может быть реализован в виде кода, хранящегося на носителе (в памяти) и приспособленного для выполнения на микроконтроллере или, в более общем смысле, процессоре. В качестве альтернативы не исключено, что часть или весь контроллер 2 может быть реализован в виде специализированной схемы аппаратного обеспечения либо конфигурируемой или реконфигурируемой схемы аппаратного обеспечения, такой как PGA или FPGA (программируемая пользователем вентильная матрица).
Путем подмешивания шума (малых отклонений) на входные уровни мерцание, вызванное неравномерным разнесением выходных уровней света, можно ослабить. В одном примере практического применения каждый символ «Троичный Манчестер» имеет продолжительность 1 мс, в то время как PWM-частота составляет 16 кГц, т.е. после того как подобран определенный входной коэффициент заполнения модуляции, один и тот же входной коэффициент заполнения используется для шестнадцати последовательных PWM-периодов (в случае отсутствия подмешивания шума). Путем подмешивания шума в эти шестнадцать входных коэффициентов заполнения для символов «Троичный Манчестер» для каждого из этих символов создается средний световой выход, который значительно более равномерно разнесен, чем в случае отсутствия подмешивания шума, что уменьшает мерцание. Аналогичный подход может также использоваться для других схем кодирования.
Как говорилось ранее, реальная передаточная функция между управляемым микропроцессором входом и средним выходным уровнем света характеризуется локальными нарушениями малого масштаба, например, такими как на Фигуре 4. В дальнейшем используется подмешивания шума для создания ʺлинеаризованной среднейʺ передаточной функции между управляемым микропроцессором входом и световым выходом.
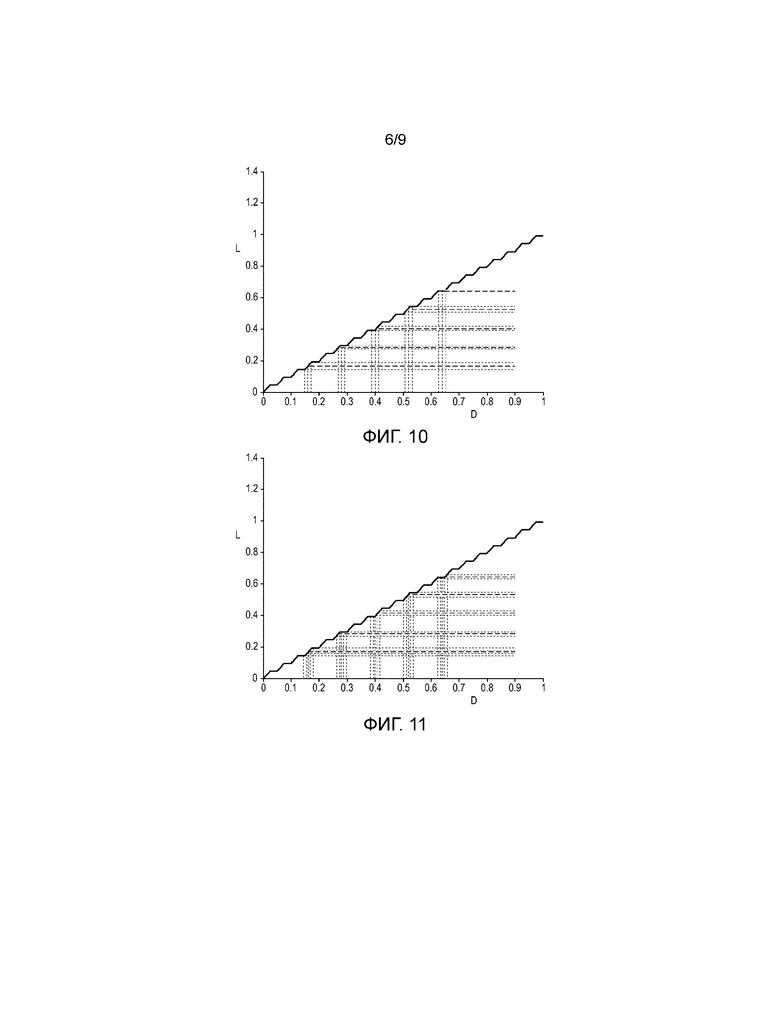
В частности, рассмотрим пример на Фигуре 10, где длина горизонтальных участков в коэффициенте заполнения (т.е. ширина искусственной флуктуации) равна половине Pbc, где Pbc - ʺпериодʺ ʺинтервалов цикл понижающего преобразователяʺ. Каждый входной коэффициент заполнения dcin можно заменить средней величиной двух входных сигналов, одного, сдвинутого на ¼ Pbc вправо, и другого, сдвинутого на ¼ Pbc влево (см. две боковые вертикальные точечные линии на Фигуре 10 в окрестности каждой центральной точечной линии, которые представляют две сдвинутые позиции, а также номинальную позицию между ними). Можно показать, что в данном случае средняя величина каждой пары создает выходной сигнал, представленный пятью жирными горизонтальными линиями на Фигуре 10, равноразнесенный между каждой последовательной парой, т.е. мерцание отсутствует. Это будет справедливым для каждого среднего светового выхода и для каждой допустимой глубины модуляции.
В примере, представленном на Фигуре 10, период цикла понижающего преобразователя Pbc=0,05, глубина модуляции=0,24, а разнесение искусственных флуктуаций составляет 0,025. Постоянная составляющая тока без двухуровневого подмешивания шума оказалась равной 0,199, а постоянная составляющая тока при использовании двухуровневого подмешивания шума оказалась равной -8,8818×10-16. Следовательно, легко видеть эффективность даже простого подмешивания шума для линеаризации периодических нарушений линейности.
Однако следует отметить, что в вышеописанном варианте осуществления с использованием двухуровневого подмешивания шума результат отсутствия остаточного мерцания будет наблюдаться только в том случае, если Pbc известен в контроллере 2, управляющей PWM-скажности (и формирующем подмешивание шума), и если длина горизонтальных участков равна половине Pbc.
Если любое из этих условий не выполняется, полная линеаризация передаточной функции, в общем, не будет достигнута, при этом остаточное уменьшенное мерцание может сохраняться. В этом случае поможет n-уровневое подмешивание шума.
На Фигуре 11 показан случай n-уровневого подмешивания шума, где n=4. Оказывается, что существенное уменьшение мерцания по-прежнему достигается, даже если Pbc точно не известен или если длина горизонтальных участков (ширина искусственной флуктуации) не равна половине Pbc.
В примере, представленном на Фигуре 11, период цикла понижающего преобразователя Pbc=0,05, глубина модуляции=0,24, а разнесение искусственных флуктуаций составляет 0,025. Постоянная составляющая тока без двухуровневого подмешивания шума оказалась равной 0,199, при этом постоянная составляющая тока при четырехуровневом подмешивании шума оказалась по существу равной 0.
В вариантах осуществления контроллер 2 выполнен с возможностью осуществления подмешивания шума согласно одному, нескольким или всем следующим условиям:
- внесение n-уровневого подмешивания шума во входные коэффициенты заполнения в соответствии с каждым из переданных символов модуляции кодированного света;
- разнесение между каждой последовательной парой амплитуд искусственных флуктуаций должно быть как можно более близким к Pbc/n, где Pbc соответствует циклическому нарушению на диаграмме зависимости между входным коэффициентом заполнения и световым выходом (см., например, Фигуру 4);
- каждый элемент набора n амплитуд искусственных флуктуаций, принадлежащих одному символу, используется с равной вероятностью 1/n;
- в общем случае более высокое значение n позволяет получить лучший результат, чем более низкое значение n;
- если отношение длины горизонтального участка (общей ширины искусственной флуктуации) к Pbc известно, предпочтительно выбрать n так, что существует значение k, 1≤k≤n-1, при котором отношение k/n близко к вышеупомянутому отношению;
- если n=4, существуют группы из четырех последовательных PWM символов, при этом каждая группа имеет четыре различные PWM-амплитуды с подмешенным шумом; и/или
- при n=4, если ʺ0ʺ, ʺ1ʺ, ʺ2ʺ и ʺ3ʺ соответствуют четырем различным PWM-амплитудам с подмешенным шумом, принадлежащим одному символ в порядке увеличения амплитуды (или коэффициента заполнения), порядок, в котором эти искусственные флуктуации должны появляться во времени в соответствующей группе, составляет ʺ0ʺ, ʺ3ʺ, ʺ2ʺ, ʺ1ʺ.
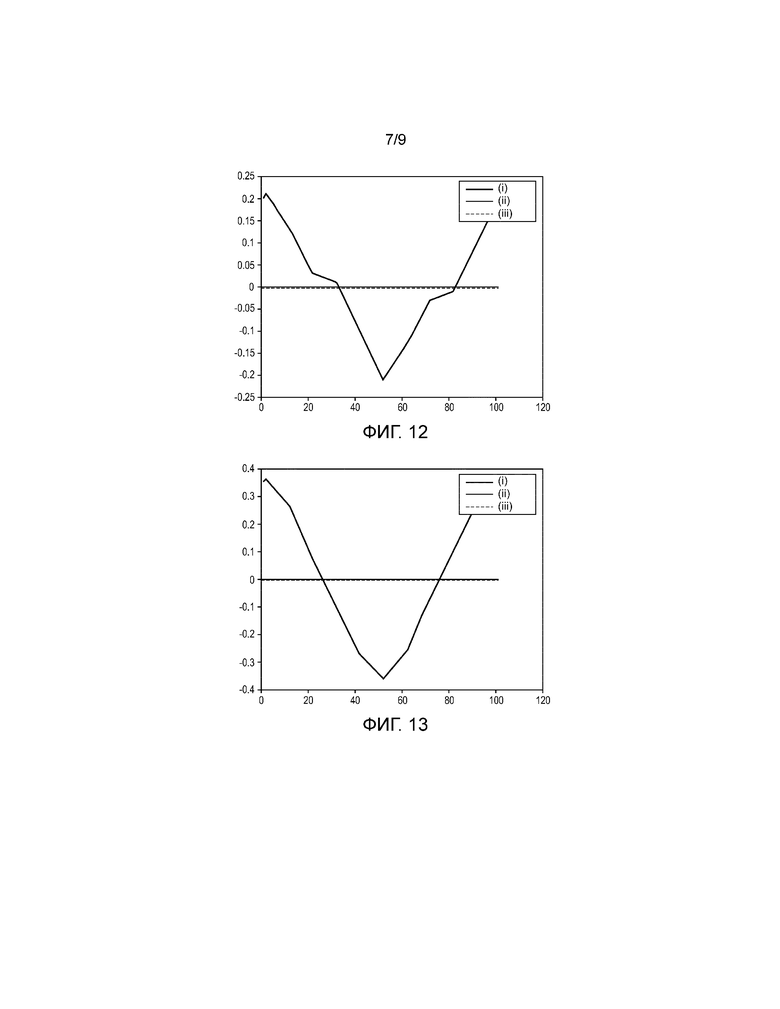
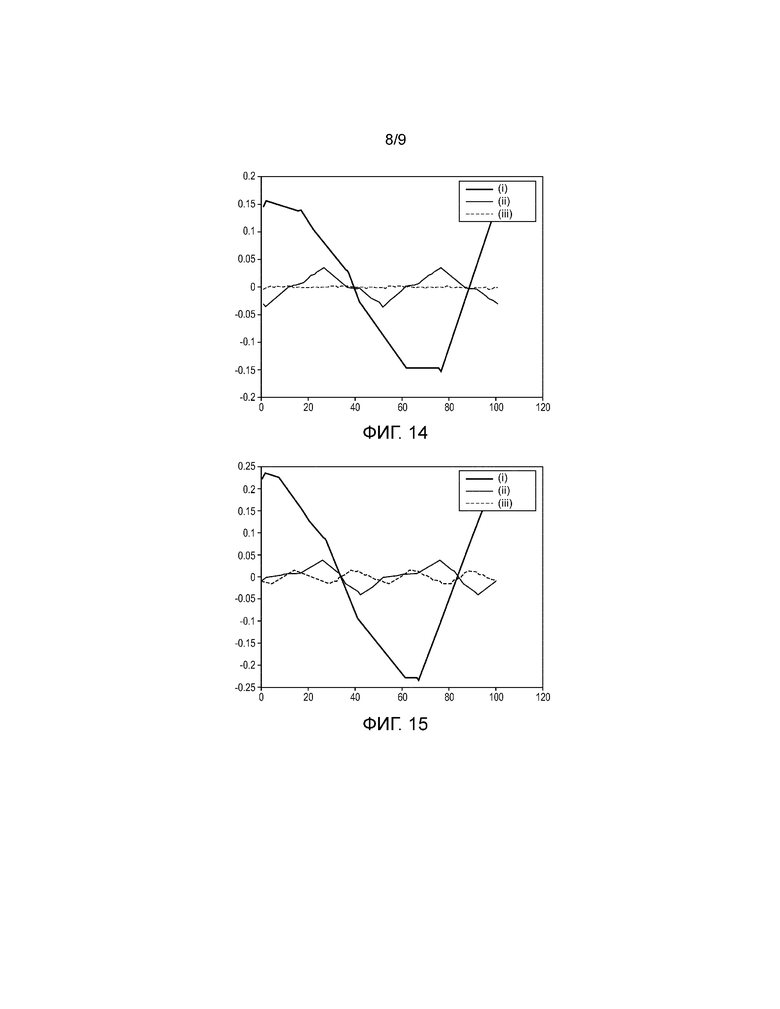
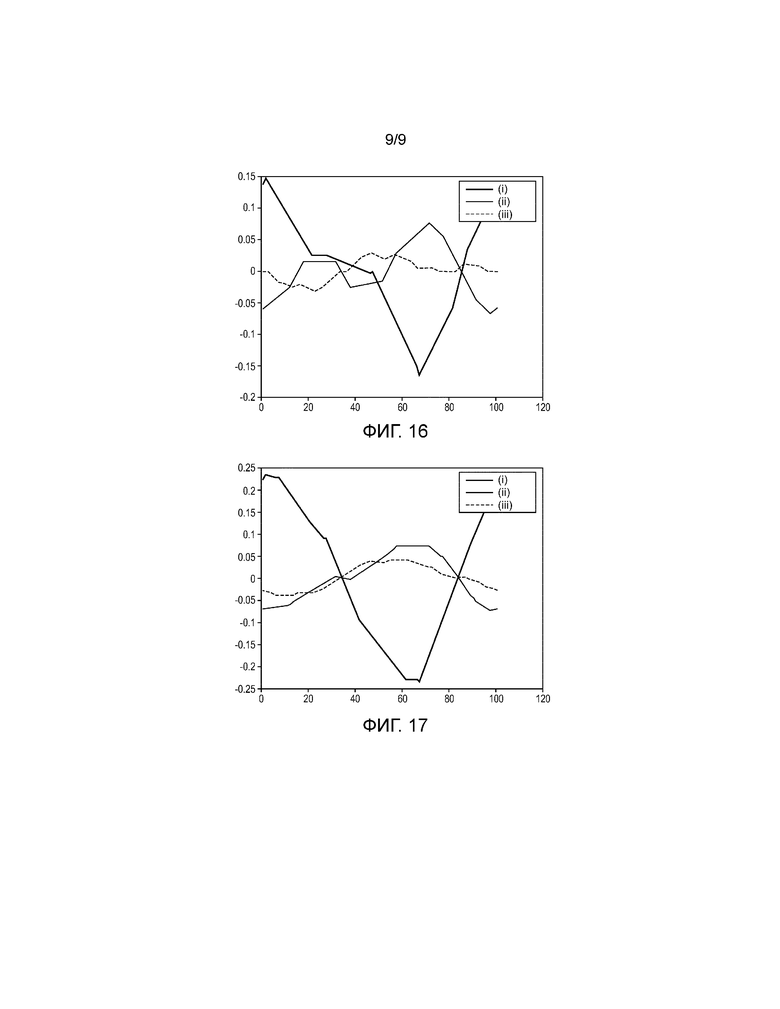
На Фигурах 12-17 показан дисбаланс постоянного тока (отражающий сформированное мерцание) заданного пакета формата V2 (состоящего из полностью нулевого паттерна 9 ʺ0ʺ) для различных наборов параметров. Для каждого набора параметров значение ʺ0ʺ-входа (см. Фиг. 6) изменяется на периоде Pbc, равном 1. Жирная сплошная линия (i) представляет случай отсутствия подмешивания шума, нежирная сплошная линия (ii) представляет двухуровневое подмешивание шума, а точечная линия (iii) представляет четырехуровневое подмешивание шума.
На Фигуре 12 показан пример, в котором горизонтальный участок - 0,5 Pbc, при этом Pbc оценен точно, а глубина модуляции составляет 0,24.
На Фигуре 13 показан пример, в котором горизонтальный участок=0,5 Pbc, Pbc оценен точно, а глубина модуляции составляет 0,28.
Следует отметить, что на Фигуре 12 уже двухуровневое подмешивание шума снижает постоянную составляющую тока до 0, поскольку Pbc оценен точно, а горизонтальный участок искусственной флуктуации равен строго половине Pbc. Следует также отметить, что на Фигуре 12 глубина модуляции выбрана так, чтобы не содержать целого числа периодов понижающего преобразователя. Глубина модуляции на Фигуре 13 (0,28) выбрана так, чтобы дать наихудшую возможную постоянную составляющую тока, если не используется подмешивание шума.
На Фигуре 14 показан пример, в котором горизонтальный участок=0,25 Pbc, Pbc оценен точно, а глубина модуляции составляет 0,28.
На Фигуре 15 показан пример, в котором горизонтальный участок=0.33 Pbc, Pbc оценен точно, а глубина модуляции: 0,28.
На Фигуре 16 показан пример, в котором горизонтальный участок=0,33 Pbc, Pbc оценен с погрешностью 20%, а глубина модуляции составляет 0,24.
На Фигуре 17 показан пример, в котором горизонтальный участок=0.33 Pbc, Pbc оценен с погрешностью 20%, а глубина модуляции: 0.28.
Отметим следующее: выше приведены различные примеры того, как подмешивание шума может адаптироваться на основе величины Pbc,, представляющей собой ʺпериодʺ цикла понижающего преобразователя, т.е. интервал регулярного повторения в пространстве коэффициента заполнения циклических дефектов (или ʺнеровностейʺ) в зависимости между коэффициентом заполнения D и выходным уровнем L (см., например, Фигуры 5-7). Как было также упомянуто выше, в вариантах осуществления подмешивание шума адаптируется на основе обратной связи по частоте fbuck понижающего преобразователя (или второй частоте), т.е. частоте модуляции более высокой частоты (или ʺколебанийʺ) во временной области (см. Фигуру 4). Кроме того, объяснено, как регулярный интервал Pbc в пространстве коэффициента заполнения связан с частотой fbuck понижающего преобразователя (или второй частотой) во временной области, а значит, можно видеть, что, зная fbuck, можно выполнить адаптацию интервала подмешивания шума на основе примеров, выраженных в терминах Pbc.
В частности, выше пояснялось, что регулярно повторяющиеся дефекты, показанные на Фигурах 5-7, имеют место потому, что при некоторых значениях коэффициента заполнения убывающий фронт PWM-сигнала совпадает с точкой минимума более высокочастотных ʺколебанийʺ частоты понижающего преобразователя (см. Фигуру 4), в то время как при других значениях коэффициента заполнения убывающий фронт PWM-сигнала совпадает с пиком частоты понижающего преобразователя. Таким образом, если представить перебор значений коэффициента заполнения от 0% до 100%, так что убывающий фронт PWM-сигнала проходит весь диапазон слева направо на Фигуре 4, то убывающий фронт PWM-сигнала будет регулярно сталкиваться с точкой минимума частоты понижающего преобразователя, затем с пиком частоты понижающего преобразователя, затем с другой точкой минимума частоты понижающего преобразователя, затем с другим пиком частоты понижающего преобразователя и т.д. Таким образом, при построении зависимости между коэффициентом заполнения и выходным уровнем, когда коэффициент заполнения откладывается по горизонтальной оси, на Фигурах 5-7 появляются регулярные ʺнеровностиʺ.
Из этого пояснения специалисту сразу же станет понятна зависимость между Pbc и fbuck. Снова представим себе перебор значений коэффициента заполнения от 0% до 100%, что соответствует «прохождению» убывающего фронта PWM-сигнала слева направо по всему диапазону одного PWM-цикла T (снова см. Фигуру 4). В ходе этого процесса будут встречаться Tbuck пики сигнала частоты понижающего преобразователя, где Tbuck - период 1/fbuck, относящийся к частоте fbuck понижающего преобразователя во временной области. Иными словами, по мере изменения коэффициента заполнения будут встречаться Tbuck пики, приходящиеся на PWM-период T, так что вдоль оси, по которой отложен коэффициент заполнения (Фигуры 5-7), паттерн неровностей повторяется с интервалом Pbc=Tbuck/T.
Следовательно, в сочетании с вышеприведенными примерами задания подмешивания шума на основе Pbc становится понятно, как обратная связь по частоте понижающего преобразователя (или второй частоте) может использоваться для адаптации подмешивания шума.
Следует понимать, что приведенные выше варианты осуществления описаны лишь в качестве примера.
Например, хотя выше рассматривался понижающий преобразователь, схожие проблемы могут встречаться в любом драйвере, в котором на фазе включения широтно-импульсной модуляции ток подается с частотой, превышающей PWM-частоту. Другими словами, другие драйверы, такие как обратноходовые преобразователи, могут подвергаться воздействию гармоник или колебаний, которые в сочетании с переключением на частоте широтно-импульсной модуляции, могут создавать проблемы, например, связанные с нелинейностью. Кроме того, технологии, раскрытые в настоящем описании, могут использоваться в других областях применения, отличных от кодированного света, или к другим нагрузкам, отличным от LED или световых источников. Например, может потребоваться уменьшить яркость освещения, создаваемого осветительным устройством, с большей степенью линейности либо управлять числом оборотов двигателя, либо управлять выходом какой-либо другой нагрузки «более линейно». Помимо этого, не обязательно во всех вариантах осуществления приводить в действие обратную связь по частоте посредством канала обратной связи или даже вообще какую-либо обратную связь. Подмешивание шума может по-прежнему способствовать повышению линейности, даже если частота переключения понижающего преобразователя известна лишь приблизительно (например, с 50% ошибкой), при этом в действительности решение с использованием подмешивания шума является надежным настолько, что способно «справляться» с малыми колебаниями даже вообще без обратной связи.
Изучив чертежи, раскрытие и прилагаемую формулу изобретения, специалисты в данной области техники смогут предложить и реализовать другие варианты осуществления. В формуле изобретения термин ʺсодержащийʺ не исключает наличия других элементов и этапов, указание на единственность не исключает множественности. Один процессор или другой блок может выполнять функции нескольких объектов, перечисленных в формуле изобретения. Тот факт, что определенные меры упоминаются во взаимно отличных зависимых пунктах формулы изобретения, не означает, что сочетание этих мер не может быть использовано с выгодой. Компьютерная программа может храниться/может быть распределена на соответствующем носителе, таком как оптический носитель или твердотельный носитель, поставляемом совместно с другим аппаратным обеспечением или в виде его части, но также может быть распределена в других формах, например через Интернет или другие проводные или беспроводные телекоммуникационные системы. Ни одну из ссылочных позиций в формуле изобретения не следует рассматривать как ограничивающую объем ее притязаний.
Изобретение относится к управлению входными сигналами с широтно-импульсной модуляцией. Технический результат заключается в расширении арсенала средств того же назначения. Электрическая цепь, содержащая контроллер (2) для управления входным сигналом с широтно-импульсной модуляцией, а также драйвер (4), выполненный с возможностью подачи тока на нагрузку (6) на основе входного сигнала, при этом на протяжении времени включенного состояния каждого периода широтно-импульсной модуляции драйвер (4) подает ток на нагрузку (6) со второй частотой, превышающей первую частоту. Контроллер (2) выполнен с возможностью управления коэффициентом заполнения для установки выхода нагрузки (6) на требуемом выходном уровне, а также подмешивания шума в коэффициент заполнения в окрестности точки, соответствующей требуемому выходному уровню. 2 н. и 12 з.п. ф-лы, 17 ил.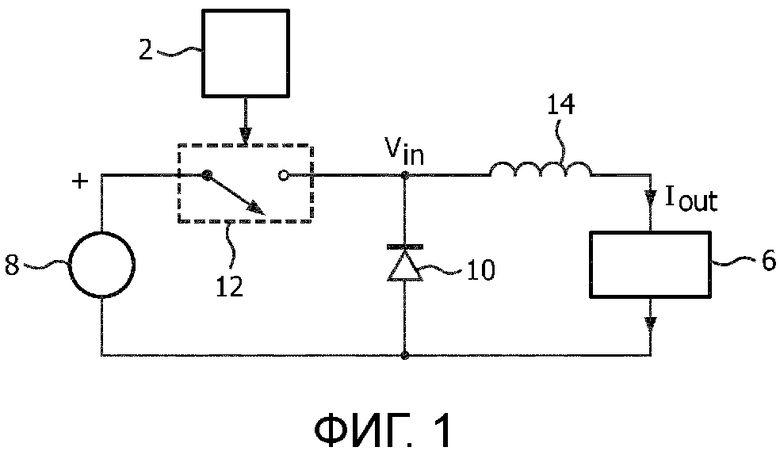
1. Электрическая цепь, содержащая:
драйвер (4); и
контроллер (2) для управления входным сигналом с широтно-импульсной модуляцией, подаваемым на драйвер, при этом входной сигнал имеет период, содержащий время включенного состояния и время выключенного состояния, причем упомянутый период повторяется с первой частотой, при этом контроллер выполнен с возможностью управления коэффициентом заполнения входного сигнала, представляющим собой соотношение между временем включенного состояния и периодом или временем выключенного состояния;
при этом драйвер (4) выполнен с возможностью подачи тока на нагрузку (6) на основе входного сигнала, при этом на протяжении времени выключенного состояния каждого периода драйвер останавливает подачу тока от источника (8) питания на нагрузку, а на протяжении времени включенного состояния каждого периода драйвер подает ток от источника питания на нагрузку, но со второй частотой, которая превышает первую частоту, при этом нагрузка формирует выход на уровне, зависящем от коэффициента заполнения;
при этом контроллер выполнен с возможностью управления коэффициентом заполнения для установки выхода нагрузки на требуемом выходном уровне, а также подмешивания шума в коэффициент заполнения в окрестности точки, соответствующей требуемому выходному уровню;
при этом электрическая цепь дополнительно содержит канал (16) обратной связи от драйвера к контроллеру для измерения второй частоты, при этом контроллер (2) выполнен с возможностью адаптации подмешивания шума коэффициента заполнения в зависимости от второй частоты, измеренной посредством упомянутого канала обратной связи.
2. Электрическая цепь по п.1, при этом контроллер (2) выполнен с возможностью управления коэффициентом заполнения для переключения выхода нагрузки (6) на множество различных выходных уровней, при этом упомянутое подмешивание шума содержит подмешивание шума в коэффициент заполнения в окрестности каждой из множества точек, соответствующих каждому из упомянутых различных выходных уровней в отдельности.
3. Электрическая цепь по любому из предшествующих пунктов, при этом нагрузка (6) содержит световой источник, а выход содержит свет, излучаемый световым источником.
4. Электрическая цепь по п.3, при этом контроллер (2) выполнен с возможностью управления коэффициентом заполнения для переключения света, излучаемого нагрузкой (6), на множество различных выходных уровней света.
5. Электрическая цепь по п.4, при этом контроллер (2) выполнен с возможностью кодирования сигнала данных в упомянутое световое излучение, используя различные выходные уровни для символов сигнала данных.
6. Электрическая цепь по п.4 или 5, при этом контроллер (2) выполнен с возможностью осуществления упомянутого подмешивания шума путем подмешивания шума в коэффициент заполнения в окрестности каждой из множества точек, соответствующих каждому из различных выходных уровней света в отдельности.
7. Электрическая цепь по любому из предшествующих пунктов, при этом:
выход нагрузки (6) изменяется в соответствии с зависимостью между коэффициентом заполнения и уровнем выхода; и
первая и вторая частоты в сочетании приводят к возникновению паттерна в зависимости между коэффициентом заполнения и уровнем выхода, который повторяется через регулярные интервалы коэффициента заполнения.
8. Электрическая цепь по п.7, при этом нагрузка (6) содержит световой источник, а выход содержит свет, излучаемый световым источником, при этом упомянутая зависимость представляет собой зависимость между коэффициентом заполнения и уровнем упомянутого света.
9. Электрическая цепь по любому из предшествующих пунктов, при этом в коэффициент заполнения подмешивается шум на множестве n дискретных шагов в окрестности упомянутой точки или в окрестности каждой из упомянутых точек.
10. Электрическая цепь по п.9, подчиненному п.7 или 8, при этом в коэффициент заполнения подмешивается шум в окрестности упомянутой точки или каждой из упомянутых точек на n шагах P/n, где P - период упомянутых регулярных интервалов коэффициента заполнения.
11. Электрическая цепь по п.9 или 10, при этом подмешивание шума является случайной величиной, при этом вероятность выбора каждого из n шагов в один период составляет 1/n.
12. Электрическая цепь по любому из предшествующих пунктов, при этом драйвер (4) представляет собой понижающий преобразователь.
13. Электрическая цепь по любому из предшествующих пунктов, при этом канал (16) обратной связи содержит делитель напряжения или дифференциальную электрическую цепь.
14. Компьютерно-читаемый носитель, содержащий программу, которая, при выполнении посредством одного или нескольких процессоров, предписывает упомянутым одному или нескольким процессорам осуществлять операции:
обеспечение подачи входного сигнала с широтно-импульсной модуляцией на драйвер (4), подающий ток на нагрузку (6) на основе входного сигнала, при этом входной сигнал имеет период, содержащий время включенного состояния и время выключенного состояния, причем упомянутый период повторяется с первой частотой, при этом на протяжении времени выключенного состояния каждого периода драйвер останавливает подачу тока от источника (8) питания на нагрузку, а на протяжении времени включенного состояния каждого периода драйвер подает ток от источника питания на нагрузку со второй частотой, превышающей первую частоту;
управление коэффициентом заполнения входного сигнала, представляющим собой отношение времени включенного состояния к упомянутому периоду или времени выключенного состояния, с целью установки выхода нагрузки на требуемом выходном уровне; и
подмешивание шума в коэффициент заполнения в окрестности точки, соответствующей требуемому выходному уровню.
| МОДУЛЯТОР СКВАЖНОСТНО-ИМПУЛЬСНЫЙ | 2007 |
|
RU2321162C1 |
| ПРЕОБРАЗОВАТЕЛЬ ЧАСТОТА - ТОК (ВАРИАНТЫ) | 2006 |
|
RU2321163C1 |
| Домовый номерной фонарь, служащий одновременно для указания названия улицы и номера дома и для освещения прилежащего участка улицы | 1917 |
|
SU93A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

