Область техники, к которой относится изобретение
Изобретение относится к сенсорному устройству, устройству измерения и способу измерений
Уровень техники изобретения
На концы проводников могут прикрепляться обжимные соединители. Важно располагать возможностью измерения качества обжимного соединения, чтобы обеспечивать электропроводность и механическую прочность соединения, а также, помимо прочего, достаточно однородное качество.
Качество соединения измеряют вручную с использованием механического измерительного инструмента. Измерение можно выполнять, например, штангенциркулем или микрометрическим винтом. В таком случае, внешние размеры соединителя измеряют для обнаружения, не слишком ли сильно или слишком слабо обжат соединитель. Кроме того, можно также определять, имеет ли соединитель правильную форму.
Качество соединения можно также измерять деструктивным способом. Деструктивные измерения включают в себя измерения поперечного сечения и измерение прочности на разрыв. При измерении поперечного сечения, соединитель физически разрезают на две части в поперечном направлении, при этом измеряют размеры, форму, расположения проводников и т.п. в поперечном сечении или на его изображении. При измерении прочности на разрыв, проводник оттягивают от соединения, и усилие, необходимое для его разрыва, измеряют. Данное измерение показывает, было ли соединение механически прочным.
Механическое измерение является длительным и неточным, и измеритель влияет на результат. Деструктивные измерения буквально разрушают соединение, и измеряемое соединение больше не применимо. При использовании деструктивного измерения, в частности, в конечном изделии будут применяться неизмеренные соединения, из чего следует, что их качество нельзя обеспечить измерением. Поэтому, существует потребность в дополнительной разработке измерения обжимных соединений проводников.
Сущность изобретения
Задачей изобретения является создание усовершенствованного решения. Задача достигается с помощью сенсорного устройства по п. 1 формулы изобретения.
Изобретение относится также к устройству измерения обжимного соединения по п. 6 формулы изобретения.
Изобретение дополнительно относится к способу измерения по п. 11 формулы изобретения.
Предпочтительные варианты осуществления изобретения раскрываются в зависимых пунктах формулы изобретения.
Устройство и способ в соответствии с изобретением обеспечивают несколько преимуществ. Обжимное соединение можно измерять вручную или автоматически, без контакта обжимного соединения с устройством измерения. Кроме того, обжимное соединение можно измерять без разрыва обжимного соединения для или во время измерения.
Перечень чертежей
Изобретение подробно описано ниже на примере предпочтительных вариантов осуществления и со ссылкой на прилагаемые чертежи, на которых
Фигура 1 - пример сенсорного устройства;
Фигура 2 - пример измерения конца проводника;
Фигура 3 - пример измерения необжатого обжимного соединителя;
Фигура 4 - пример изготовления двух обжимных соединений одновременно;
Фигура 5A - пример обжимного соединения между двумя проводниками;
Фигура 5B - другой пример обжимного соединения между двумя проводниками;
Фигура 6 - пример обжимного устройства;
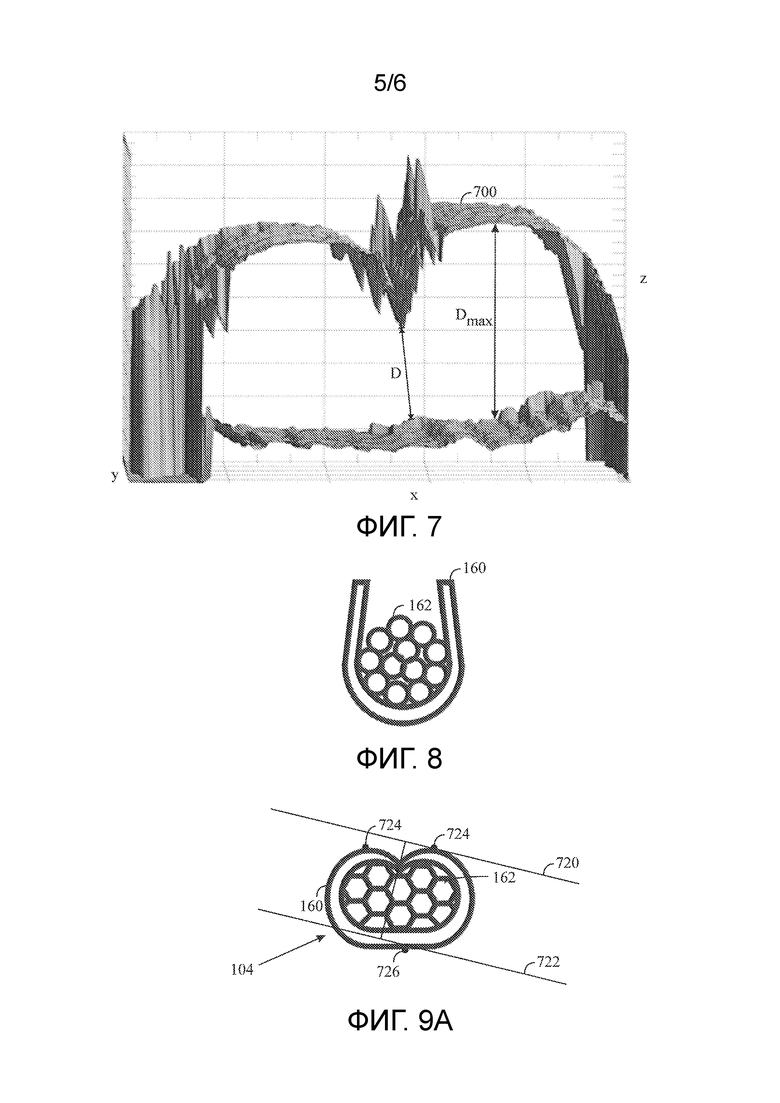
Фигура 7 - пример профиля поверхности обжимного соединения;
Фигура 8 - пример обжимного соединителя и проводников перед обжимом;
Фигура 9A - пример обжимного соединителя и проводников после обжима;
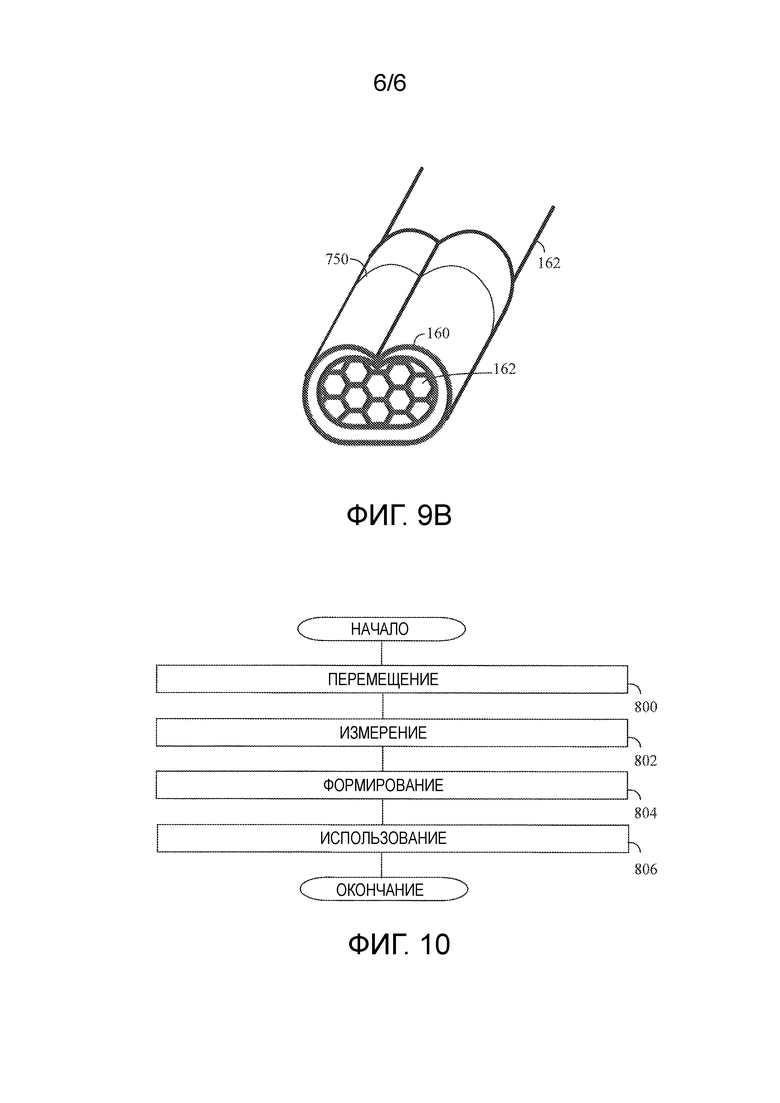
Фигура 9B - пример сканирующего измерения обжимного соединения; и
Фигура 10 - типовая схема последовательности операций способа измерения.
Описание вариантов осуществления
Последующие варианты осуществления представлены в качестве примеров. Даже в случае, если описании может давать ссылку на вариант осуществления или варианты осуществления в разных местах, это не обязательно означает, что каждая такая ссылка относится на один и тот же вариант осуществления или одни и те же варианты осуществления, или что признак относится только к одному варианту осуществления. Отдельные признаки разных вариантов осуществления можно также объединять, чтобы сделать возможными другие варианты осуществления.
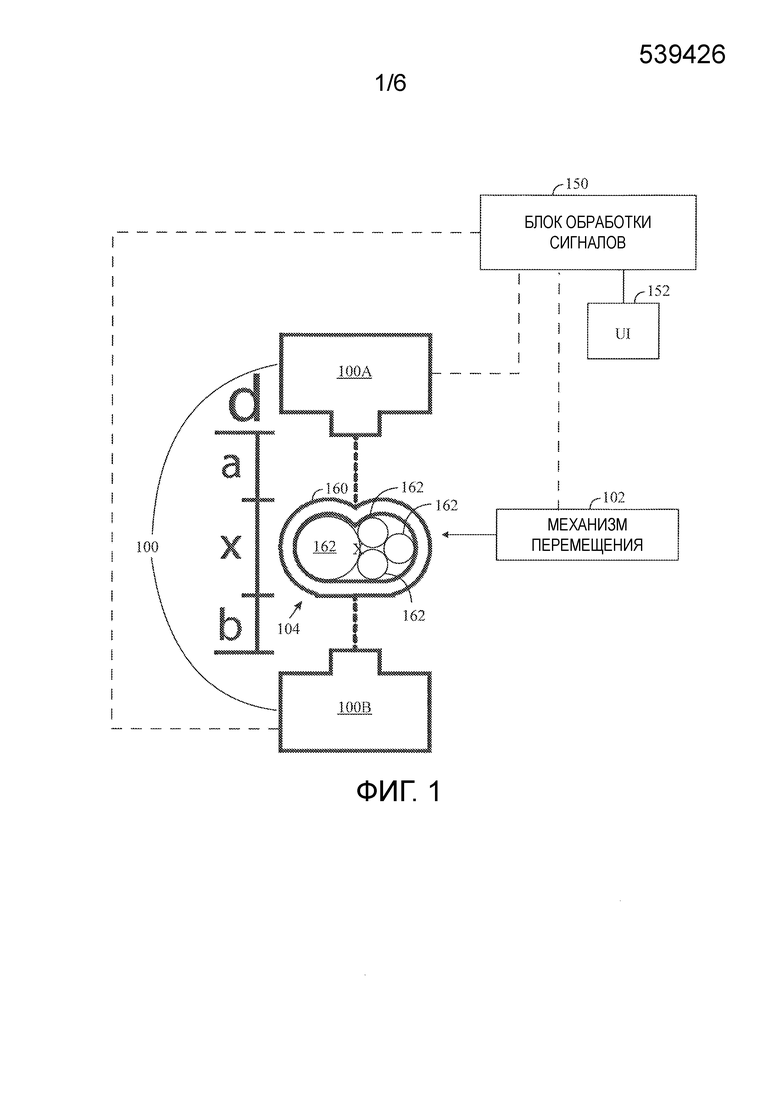
Фигура 1 схематически представляет пример сенсорного устройства для измерения обжимного соединения. Сенсорное устройство содержит дальномерное сенсорное устройство 100 на основе использования оптического излучения и механизм 102 перемещения, который перемещает обжимное соединение 104, сформированное обжимом относительно дальномерного сенсорного устройства 100. На фигуре 1 показано, что дальномерное сенсорное устройство 100 содержит два датчика 100A и 100B дальности, но, в общем, в данном устройстве может быть один или более датчиков дальности. Датчик 100A дальности может быть единственным измерительным блоком, который, обычно, содержит, например, два лазерных датчика. Датчик 100B дальности может быть, соответственно, единственным измерительным блоком, который обычно, содержит, например, два лазерных дальности.
Обжимное соединение 104 содержит соединитель 160 и, по меньшей мере, один проводник 162, каждый из которых может также называться проводом. По меньшей мере, один проводник 162 может, в свою очередь, содержать одну или более жил. Число и расположение проводников 162 в обжимном соединителе 160 может свободно изменяться. Соединитель 160 может быть выполнен из металла. Один или более проводников также могут быть выполнены из металла или некоторого другого электропроводного материала. Металл, по меньшей мере, одного проводника 162 может содержать, по меньшей мере, какой-то один из следующих, например: меди, серебра и золота, без ограничения перечисленным. В настоящей патентной заявке, оптическое излучение, в свою очередь, относится к электромагнитному излучению в диапазоне длин волн, приблизительно, от 10 нм до 500 мкм. В варианте осуществления применяются ультрафиолетовый свет, видимый свет и/или инфракрасный свет. В варианте осуществления применяются видимый свет и/или ближний инфракрасный свет.
Дальномерное сенсорное устройство 100 измеряет расстояние между дальномерным сенсорным устройством 100 и обжимным соединением 104. Работа дальномерного сенсорного устройства 100 в варианте осуществления может быть основана на принципе триангуляции. Дальномерное сенсорное устройство 100 может содержать OD5-30T05 в серии OD Precision, выпускаемые компанией SICK. Контроллер датчиков может быть, например, контроллером AOD5-PI компании SICK.
В процессе оптической триангуляции, оптический излучатель посылает узкий световой пучок, который формирует освещенную точку на поверхности измеряемого объекта. Направление светового пучка можно изменять, и, в таком случае, освещенная точка формируется в разных точках на измеряемой поверхности. Свет отражается от разных точек измеряемой поверхности и попадает в точечной форме в разные точки на обнаруживаемой поверхности, которая может содержать матрицу пикселей. Матрица пикселей может быть, в свою очередь, полупроводниковым компонентом. Местоположение освещенной точки на обнаруживаемой поверхности определяет, вместе с расстоянием между оптическим излучателем и обнаруживаемой поверхностью и направлением оптического пучка, расстояние измеряемой поверхности от оптического излучателя и/или обнаруживаемой поверхности. Данный вид принципа измерения, по существу, известен. Точность измерения промышленно применяемых устройств очень высока, при погрешности даже менее, чем 1 мкм. Например, часто достаточна погрешность приблизительно 1/100 мм или только 1/10 мм.
Принцип оптической триангуляции часто применяется на объектах на дальностях, самое большее, один метр, и, поэтому, принцип измерения хорошо подходит для измерения обжимных соединений, поскольку обжимные соединения часто находятся в диапазоне размеров порядка нескольких миллиметров, нескольких сантиметров или, самое большее, нескольких десятков сантиметров. Однако, настоящее решение не ограничено оптической триангуляцией, и можно также использовать другие принципы оптических измерений. Примерами других известных принципами оптических измерений являются измерение времени распространения и измерения разности фаз.
В варианте осуществления механизм 102 перемещения может содержать, например, электродвигатель и, возможно, механизм передачи, перемещаемый электродвигателем.
Таким образом, дальномерное сенсорное устройство 100 может функционировать как лазерный сканер, посредством которого значения координат каждой точки даже среди большого числа точек на измеряемом объекте можно измерять в трех разных измерениях, т.е. координатах x, y и z. Обычно, имеется множество измеряемых точек, например, от нескольких десятков до нескольких миллионов, что дает возможность формировать профиль поверхности измеряемого объекта. Лазерный сканер или подобное устройство может сканировать по обжимному соединению 104 для формирования информации о линейном контуре поперечного сечения обжимного соединения 104 или проводника 162. В варианте осуществления может потребоваться только одно сканирование.
Вместо реального лазера, источником оптического излучения может быть СД (светодиод) или даже обычная лампа.
Определение удаления нескольких точек на поверхности обжимного соединения 104 можно выполнять перемещением обжимного соединения 104 относительно дальномерного сенсорного устройства 100. Измерение нескольких местоположений в обжимном соединении 104 требует, чтобы перемещение обжимного соединения 104 относительно датчика 100 дальности содержало составляющую в направлении, отличающемся от нормали в одном местоположении на поверхности обжимного соединения 104. Другими словами, только удаление дальномерного сенсорного устройства 100 и обжимного соединения 104 друг от друга и/или их сближение друг с другом допускает измерение одной точки на разных дальностях. Когда обжимное соединение 104 перемещается относительно дальномерного сенсорного устройства 100, которое направляет определение удаления разных точек поверхности обжимного соединения 104, можно измерять расстояние разных точек поверхности обжимного соединения 104 относительно дальномерного сенсорного устройства 100. Измеренные данные дальности можно использовать для определения качества обжимного соединения 104. Качество может относиться к измеряемым физическим свойствам.
В варианте осуществления механизм 102 перемещения может поворачивать обжимное соединение 104, по меньшей мере, частично, относительно дальномерного сенсорного устройства 100. В варианте осуществления центр X поворота может находиться внутри обжимного соединения 104. В варианте осуществления центр поворота может находиться между обжимным соединением 104 и дальномерным сенсорным устройством 100. В варианте осуществления центр поворота не находится между обжимным соединением 104 и дальномерным сенсорным устройством 100 или внутри обжимного соединения 104, другими словами, центр вращения находится в другом местоположении, кроме местоположения между обжимным соединением 104 и дальномерным сенсорным устройством 100, или внутри обжимного соединения 104.
В варианте осуществления механизм 102 перемещения может поворачивать обжимное соединение 104 относительно дальномерного сенсорного устройства 100 во время измерения. В таком случае, центр X поворота может находиться внутри обжимного соединения 104.
В варианте осуществления механизм 102 перемещения может перемещать обжимное соединение 104 в направлении продольной оси проводника 162 во время измерительного процесса, который содержит несколько измерительных действий. Одно измерительное действие относится к измерению, выполняемому для формирования результата определения удаления для одной точки измерения.
В варианте осуществления действие по определению удаления каждой точки измерения может выполняться во время перемещения обжимного соединения 104.
В варианте осуществления определение удаления может выполняться посредством останова перемещения обжимного соединения 104 в каждой точке измерения, чтобы выполнить действие по определению удаления, и затем перемещения в следующую точку измерения посредством перемещения обжимного соединения 104, чтобы измерить его удаление.
В варианте осуществления, показанном на фигуре 1, дальномерное сенсорное устройство 100 содержит, по меньшей мере, два датчика 100A, 100B дальности, при этом каждый датчик 100A/100B расположен с возможностью измерения множества точек измерения обжимного соединения 104 с разных направлений относительно одного или более других датчиков 100B/100A дальности.
В варианте осуществления устройство измерения содержит измерительное сенсорное устройство 100, механизм 102 перемещения и блок 150 обработки сигналов. Блок 150 обработки сигналов принимает измеренные расстояния из датчиков 100A, 100B по проводному или беспроводному соединению и формирует данные профиля поверхности на основе измеренных расстояний, и использует данные профиля поверхности обжимного соединения 104, чтобы определять качество обжимного соединения 104, и отображает данные, относящиеся к обжимному соединению 104, на подключенном к нему пользовательском интерфейсе 152 (UI). Качество может означать размер обжимного соединения 104 и форму обжимного соединения 104.
В варианте осуществления блок 150 обработки сигналов находит самое узкое место обжимного соединения 104 по данным определения удаления и использует его как основу для данных оценки качества обжимного соединения 104. Качество может означать размер обжимного соединения 104 и форму обжимного соединения 104. Самое узкое место соотносится с тем, насколько сильно были обжаты обжимной соединитель 160 и один или более проводников 162. Самое узкое место относится к наименьшему диаметру D обжимного соединения 104 (смотри фигуру 7). Данный диаметр показывает, имеет ли обжимное соединение 104 правильный/ую или подходящий/ую размер/форму.
В варианте осуществления блок 150 обработки сигналов находит наиболее высокую точку обжимного соединения 104 по данным определения удаления из датчиков 100A, 100B дальности и использует ее как основу для данных оценки качества обжимного соединения 104. Наиболее высокая точка соотносится с тем, насколько сильно были обжаты обжимной соединитель 160 и один или более проводников. Наиболее высокую точку можно определять таким образом, чтобы дальность наиболее высокой точки было наименьшей. Наиболее высокая точка относится к наибольшему диаметру Dmax обжимного соединения 104. Данный диаметр показывает, имеет ли обжимное соединение 104 правильный/ую или подходящий/ую размер/форму. Таким образом, в процессе измерения можно найти, по меньшей мере, одну точку, которая имеет, по меньшей мере, одно из следующих свойств: диаметр обжимного соединения является наибольшим, и диаметр обжимного соединения является наименьшим.
Если как обжимной соединитель 160, так и один и более проводников 162, используемых в соединении, имели правильный размер, но, возможно, обжимное усилие было слишком сильным или слабым, то именно поэтому обжимное соединение 104 не имеет правильного/ой или подходящего/ей размера/формы. С другой стороны, примененное обжимное усилие может быть правильным или подходящим, но обжимной соединитель 160 и/или один или более проводников 162, используемых в соединении, могут быть неподходящими или несоответствующими. Это также дает отклонение размера и/или формы обжимного соединения 104 от соответствующих или подходящих.
В варианте осуществления блок 150 обработки сигналов задает форму профиля поверхности обжимного соединения 104 и использует упомянутую форму профиля поверхности обжимного соединения 104 в качестве основы для данных оценки качества обжимного соединения 104.
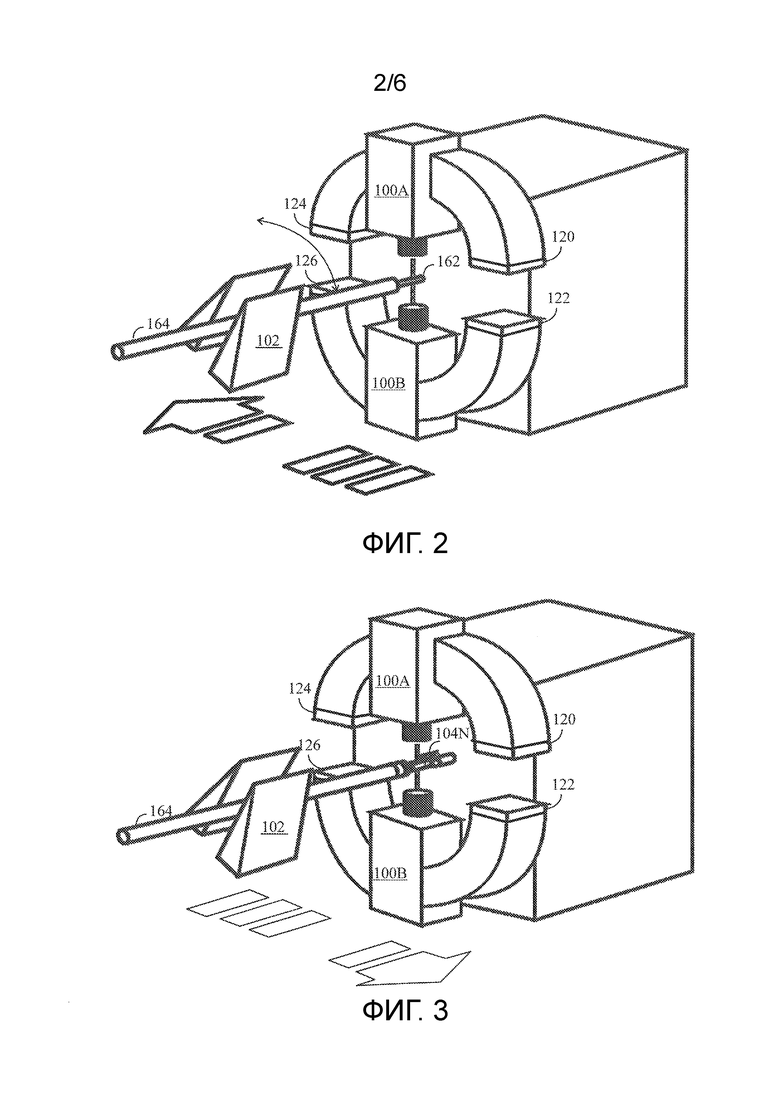
Фигура 2 представляет вариант осуществления, в котором дальномерное сенсорное устройство 100 измеряет расстояние между датчиками 100A, 100B дальности и проводником 162 посредством перемещения механизма 102 перемещения относительно дальномерного сенсорного устройства 100 таким же образом, как в связи с измерением обжимного соединения. Это действие выполняется до сформированного обжимного соединения 104. Проводник 162 может быть покрыт электроизоляционным материалом 164. Изоляционный материал 164 может быть полимером, например, пластиком или резиной. Изоляционный материал 164 можно счищать с конца проводника 162 перед соединением, как поясняется также в связи с фигурой 4. Затем, как показано на фигуре 1, блок 150 обработки сигналов использует данные измерения, относящиеся к проводнику 162, совместно с данными измерения, относящимися к профилю поверхности обжимного соединения 104, для определения качества обжимного соединения 104. Механизм 102 перемещения для перемещения проводника 162 схематически показан с клиновидными конструкциями на фигурах 2 и 3.
В варианте осуществления, показанном на фигуре 2, устройство измерения может содержать сенсорные блоки 120 и 124. Когда проводник 162 перемещают по направлению к измерению датчиками 100A, 100B дальности, проводник 162 сначала проходит мимо первого сенсорного блока 120. Затем, сенсорный блок 120 обнаруживает проводник 162, и обнаружение является сигналом, что можно выполнять измерение датчиками 100A, 100B дальности. То есть, блок 150 обработки сигналов принимает сигнал и управляет датчиками 100A, 100B дальности, чтобы начать измерения расстояния. Когда перемещающийся проводник 162 проходит мимо второго сенсорного элемента 124, обнаружение вторым сенсорным элементом 124 является сигналом для прекращения измерения датчиками 100A, 100B дальности. То есть, блок 150 обработки сигналов принимает сигнал из второго сенсорного элемента 124 и управляет датчиками 100A, 100B дальности, чтобы прекратить измерения расстояния. Вместо сенсорных блоков 120 и 124, обнаружение с целью начала и прекращения измерения расстояния может выполняться сенсорными блоками 122 и 126. Обнаружение с целью начала и прекращения измерения расстояния может также выполняться сенсорными блоками 120 и 126 или сенсорными блоками 122 и 124.
В другом варианте осуществления, когда проводник 162 перемещают по направлению к измерению датчиками 100A, 100B дальности, проводник 162 сначала проходит через зазор между первыми сенсорными элементами 120, 122. Затем, первые сенсорные элементы 120, 122 обнаруживают проводник 162, и обнаружение является сигналом, что можно выполнять измерение датчиками 100A, 100B дальности. Когда перемещающийся проводник 162 проходит через вторые сенсорные элементы 124, 126, обнаружение вторыми сенсорными элементами 124, 126 является сигналом для прекращения измерения датчиками 100A, 100B дальности. Обнаружение, выполняемое первым и вторым сенсорными элементами 120, 122 и 124, 126, может быть основано, например, на оптическом измерении. Сенсорные элементы 120, 122 могут содержать фотоэлектрический щелевой датчик или что-то подобное. Аналогичным образом, сенсорные элементы 124, 126 могут содержать фотоэлектрический щелевой датчик или что-то подобное. Фотоэлектрический щелевой датчик может быть, например, датчиком типа SRF-30, SRF-50, SRF-80 или SRF-120 компании Datalogic.
В общем, каждый проводник имеет свой собственный обжимной соединитель 160. Затем, каждый проводник или все проводники имеют заранее заданную информацию профиля обжимного соединения, которую можно заранее сохранять в памяти блока 150 обработки сигналов, или блок 150 обработки сигналов может извлекать информацию по сети передачи данных из сервера. Когда выполняют первое измерение проводника 162 или проводников 162, то проводник 162 или проводники 162 указывают, какой обжимной соединитель 160 следует применить для упомянутого одного или более проводников 162. Кроме того, блок 150 обработки сигналов может содержать в своей памяти информацию, относящуюся к предполагаемому профилю обжимного соединения, для упомянутого проводника 162. Затем, если в обжимном соединении измеренного, по меньшей мере, одного проводника 162 применяется ненормальный или несоответствующий обжимной соединитель 160, и если обжимное соединение представляется, по существу, оптимальным или визуально соответствует предварительно заданным правилам, то устройство измерения может сигнализировать о качестве обжимного соединения потому, что, в соответствии с результатами измерений, обжимное соединение все же не подходит для упомянутого одного или более проводников 162. Несоответствующий или ненормальный проводник 162 отличается именно размером от соответствующего или подходящего проводника.
Соответственно, если проводник 162 соответствует требованиям или является подходящим, или все проводники 162 соответствуют требованиям или являются подходящими, но обжимной соединитель 160 не является нормальным, подходящим или соответствующим требованиям, то устройство измерения может сигнализировать о качестве обжимного соединения на основе результатов измерения одного или более проводников 162 и обжимного соединения 104 потому, что, в соответствии с результатами измерений, обжимное соединение не подходит для проводника или проводников 162.
Фигура 3 схематически представляет вариант осуществления, в котором дальномерное сенсорное устройство 100 (показанное на фигуре 1) измеряет расстояние между датчиками 100A, 100B дальности и обжимным соединением 104N, не обжатым обжимным устройством 402, 404 (показанным на фигуре 4) в то время, когда механизм 102 перемещения перемещается относительно дальномерного сенсорного устройства 100. После того, как определение удаления в соответствии с фигурой 1, в ходе которого расстояние между дальномерным сенсорным устройством 100 и обжимным соединением 104, обжатым обжимным устройством 402, 404 измеряют по мере того, как механизм 102 перемещения перемещается относительно дальномерного сенсорного устройства 100, также произведено, блок 150 обработки сигналов может использовать данные измерения, относящиеся к профилю поверхности необжатого обжимного соединения 104N и обжатого обжимного соединения 104, чтобы определить качество обжимного соединения 104, обжатого обжимным устройством 402, 404.
В варианте осуществления, показанном на фигуре 3, устройство измерения может содержать сенсорные блоки 120 и 124, которые показаны также на фигуре 2. Когда обжимное соединение, обжатое (104) или необжатое (104N), перемещают по направлению к измерению датчиками 100A, 100B дальности, обжимное соединение 104N, 104 сначала проходит первый сенсорный блок 120. В таком случае, сенсорный блок 120 обнаруживает обжимное соединение 104N, 104, и обнаружение является сигналом, что можно выполнять измерение датчиками 100A, 100B дальности. То есть, блок 150 обработки сигналов принимает сигнал и управляет датчиками 100A, 100B дальности, чтобы начать измерения расстояния. Когда перемещающееся обжимное соединение 104N, 104 проходит мимо второго сенсорного элемента 124, обнаружение вторым сенсорным элементом 124 является сигналом для прекращения измерения датчиками 100A, 100B дальности. То есть, блок 150 обработки сигналов принимает сигнал из второго сенсорного элемента 124 и управляет датчиками 100A, 100B дальности, чтобы прекратить измерения расстояния. Вместо сенсорных блоков 120 и 124, обнаружение с целью начала и прекращения измерения расстояния может выполняться сенсорными блоками 122 и 126. Обнаружение с целью начала и прекращения измерения расстояния может также выполняться сенсорными блоками 120 и 126 или сенсорными блоками 122 и 124.
В другом варианте осуществления, когда обжимное соединение 104N, 104 перемещают по направлению к измерению датчиками 100A, 100B дальности, обжимное соединение 104N, 104 сначала проходит через зазор между первыми сенсорными элементами 120, 122. В таком случае, первые сенсорные элементы 120, 122 обнаруживают обжимное соединение 104N, 104, и обнаружение является сигналом, что можно выполнять измерение датчиками 100A, 100B дальности. Когда перемещающееся обжимное соединение 104N, 104 проходит через вторые сенсорные элементы 124, 126, обнаружение вторыми сенсорными элементами 124, 126 является сигналом для прекращения измерения датчиками 100A, 100B дальности. Обнаружение, выполняемое первым и вторым сенсорными элементами 120, 122 и 124, 126 может быть основано, например, на оптическом измерении. Сенсорные элементы 120, 122 могут содержать фотоэлектрический щелевой датчик или что-то подобное. Аналогичным образом, сенсорные элементы 124, 126 могут содержать фотоэлектрический щелевой датчик или что-то подобное. Фотоэлектрический щелевой датчик может быть, например, датчиком типа SRF-30, SRF-50, SRF-80 или SRF-120 компании Datalogic.
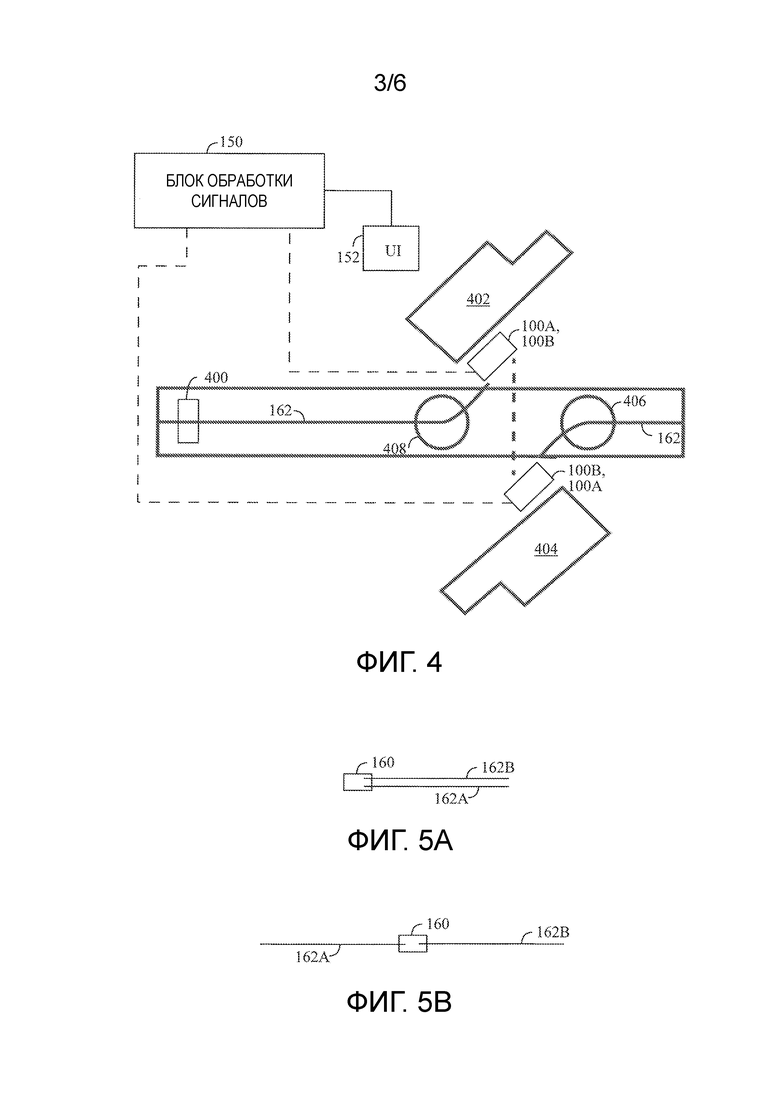
Фигура 4 схематически представляет пример соединительного приспособления, которое содержит инструмент 400 для резки проводников, два обжимных устройства 402, 404, два датчика 100A, 100B дальности, механизмы 406, 408 поворота проводника 162 и блок 150 обработки сигналов. Кроме того, обжимное соединительное приспособление может перемещать проводники 162 в продольном направлении проводников 162 и, возможно, зачищать концы проводников 162 для соединения, но упомянутые части не описаны подробно в настоящей патентной заявке, так как они несущественны для настоящего решения. После того, как проводник 162 перерезан, механизмы 406, 408 поворота проводников 162 поворачивают конец проводника 162 к обжимным устройствам 402, 404. Затем, обжимной соединитель можно закрепить на обоих концах проводников 162 посредством обжимных устройств 402, 404. Качество обжимного соединения на концах обоих проводников 162 можно измерять датчиками 100A, 100B дальности. Кроме того, можно измерять концы проводников 162 датчиками 100A, 100B дальности до создания обжимного соединения. Качество относится к предварительно заданной форме или размеру обжимного соединения 104. Сдавливание обжимного соединения 104 может минимизировать количество воздуха в обжимном соединении 104. Предварительно заданная форма или размер обжимного соединения 104 зависит от типа обжимного соединения 104. Как уже изложено выше, блок 150 обработки сигналов формирует данные профиля поверхности на основе измеренных расстояний и использует данные профиля поверхности обжимного соединения 104, чтобы определять качество обжимного соединения 104, и отображает данные, относящиеся к обжимному соединению 104, на подключенном к нему пользовательском интерфейсе 152.
Фигура 5A схематически представляет пример варианта осуществления, в котором, вместо монтажа обжимного соединителя 160 на конце проводника, два проводника 162A, 162B могут быть соединены на их концах с обжимным соединителем 160. Несколько проводников 162A, 162B могут входить в обжимной соединитель 160 с одной стороны обжимного соединителя 160. Проводники 162A, 162B показаны внутри обжимного соединителя 160. Концы проводников 162 введены внутрь обжимного соединителя 160, и обжимной соединитель 160 с его проводниками 162 обжимается обжимным устройством 402, 404. Тем самым формируется длинный проводник, обжимное соединение 104 которого можно проверять вышеописанным способом измерения.
Фигура 5B схематически представляет пример варианта осуществления, в котором несколько проводников 162A, 162B могут входить в обжимной соединитель 160 с противоположной стороны обжимного соединителя 160. в обжимной соединитель 160 с той же стороны обжимного соединителя 160. Проводники 162A, 162B показаны внутри обжимного соединителя 160.
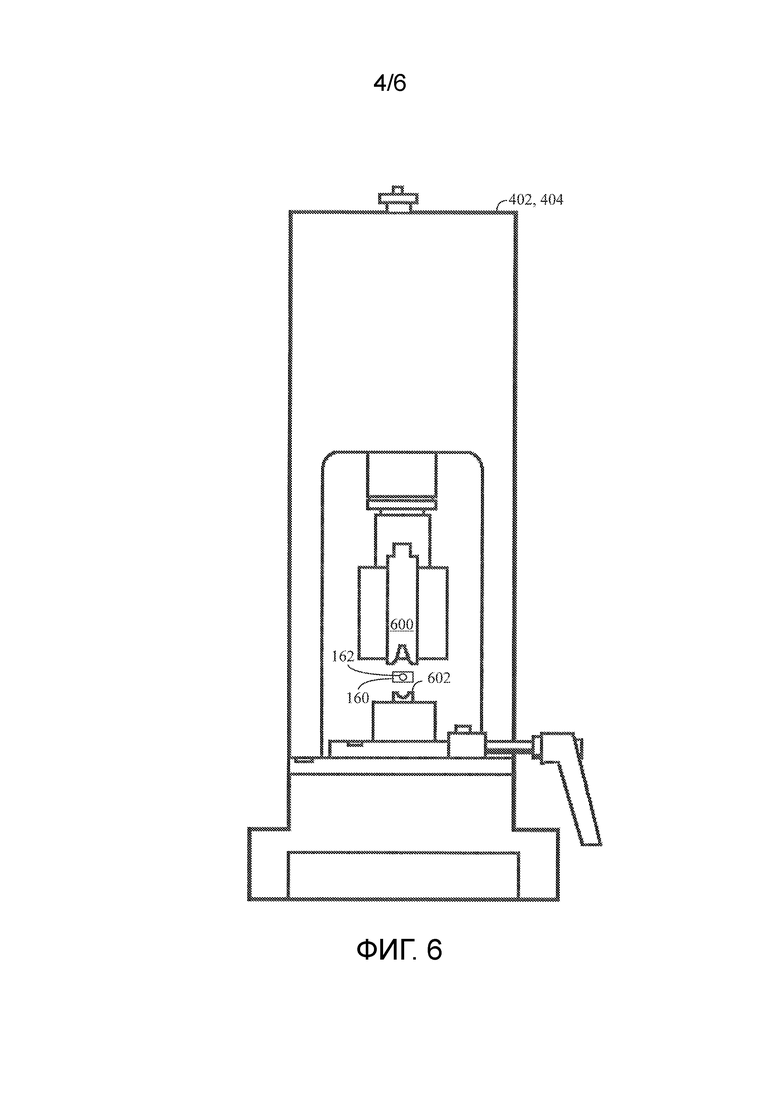
Фигура 6 схематически представляет пример обжимного устройства. Обжимное устройство 402, 404 может содержать обжимные зажимы 600, 602, между которыми обжимается обжимной соединитель 160 с одним или более проводниками 162. Источник мощности обжимного устройства 402, 404 может быть выполнен на основе гидравлической системы, и в таком случае данное устройство является гидравлическим обжимным устройством, на основе пневматической системы, и в таком случае данное устройство является пневматическим обжимным устройством, или на основе механической системы, и в таком случае механический движитель перемещает обжимные зажимы 600, 602 друг к другу посредством механизма передачи на этапе обжима. Механический движитель может быть, например, электродвигателем. Во время обжима обжимного соединителя и проводников, обжимное соединение следует обжимать в достаточной степени, чтобы в соединении не оставалось избыточного воздуха. Когда обжимное соединение соответствует требованиям к сопротивлению разрыву, толщине и форме, в обжимном соединении отсутствует избыточный воздух. Поэтому, если обжимное соединение, измеренное с использованием решения, раскрытого в настоящей патентной заявке, то количество остатков воздуха в данном соединении также оптимизировано.
Фигура 7 схематически представляет пример профиля 700 поверхности обжимного соединения, которое измерено двумя измерительными датчиками 100A, 100B с разных сторон обжимного соединения. Самое узкое место и диаметр D самого узкого места можно определить по измеренному профилю поверхности. Наиболее высокую точку и диаметр Dmax в наиболее высокой точке можно определить по измеренному профилю поверхности. Наименьший и наибольший диаметры можно измерять параллельно обжимному усилию или, по меньшей мере, почти параллельно обжимному усилию, т.е., в настоящем случае, вертикально. Ось z в вертикальном направлении представляет толщину обжимного соединения, ось x в горизонтальном направлении представляет ширину обжимного соединения, и ось у в направлении глубины фигуры 7 представляет форму профиля поверхности в продольном направлении соединителя (и одного или более проводников). Оценка качества обжимного соединения на основе определения дальности обеспечивает более точный результат, чем измерение, например, по фотографии, так как по фотографии невозможно или, по меньшей мере, почти невозможно измерить местоположение края обжимного соединения с погрешностью/разрешением 0,001 мм. Получить погрешность 1/100 мм или, более того, 1/10 мм уже затруднительно.
Фигура 8 схематически представляет пример поперечного сечения обжимного соединителя 160 и проводников 162 до обжима. Фигура 9A изображает обжимной соединитель 160 и проводники 162 после обжима. Во время обжима обжимной соединитель 160 может плотно сдавливаться вокруг проводников 162, и проводники 162 могут плотно прижиматься друг к другу. Фигуры 8 и 9A показывают, что, после обжима, между проводниками 162 и между проводниками 162 и обжимным соединителем 160 может быть меньше воздуха, чем до обжима. Однако, количество воздуха не обязательно изменяется. Кроме того, проводники 162 могут деформироваться вместе с обжимным соединителем 160 под действием обжимного усилия. Круглое поперечное сечение проводников 162 может деформироваться под давлением до формы, более или менее напоминающей, например, соты. Требуемое обжимное соединение обычно имеет минимальное уплотнение, все проводники и их возможные жилы находятся внутри ушек зажима, и ушки зажима сформированы равномерно.
Фигура 9A схематически представляет пример поперечного сечения, в котором профиль обжимного соединения 104 может находиться под любым углом относительно дальномерного сенсорного устройства 100. Размер, например, толщину обжимного соединения 104 можно вычислить на основании наклона параллельных линий 720, 722, нормаль к которым направлена по направлению к дальномерному сенсорному устройству 100. Линии 720, 722 можно построить на основании регрессии. Расстояние между линиями 720, 722 определяет размер обжимного соединения 104. Линии 720, 722 можно сформировать по результатам измерений, выполненных с противоположных сторон обжимного соединения 104. Блок 150 обработки сигналов может определить линии 720, 722 из расчета, что они являются касательными к поверхности обжимного соединения 104.Местоположение, в котором линии 720, 722 касаются обжимного соединения 104 под разными углами, можно определять из опыта, моделированием или теоретически.
Можно найти наиболее высокие точки, например, локальные максимумы 724, 726 обжимного соединения 104, и можно формировать линию, проходящую через точки 724. Затем можно определить кратчайшее расстояние между линиями, проходящими через точки 724 и точку 726, чтобы сформировать диаметр обжимного соединения 104.
Фигура 9B представляет пример поперечного сечения для сканирующего измерения. Дальномерное устройство 100 может выполнять одно сканирование для измерения расстояний по обжимному соединению 104 в поперечном направлении относительно продольной оси проводника 162 обжимного соединения 104. В варианте осуществления по обжимному соединению 104 выполняется не более одного сканирования. В данном примере результатом является линейный контур 750 профиля поперечного сечения обжимного соединения 104. Аналогичный линейный контур 750 профиля поперечного сечения проводника 162 можно также измерить до измерения обжима.
Фигура 10 является блок-схемой последовательности операций установленного способа. На этапе 800, механизм 102 перемещения перемещает сформированное обжимное соединение 104 и дальномерное сенсорное устройство 100 друг относительно друга. На этапе 802, дальномерное сенсорное устройство 100, которое основано на использовании оптического излучения измеряет расстояние между разными точками измерения дальномерного сенсорного устройства 100 и поверхностью обжимного соединения 104 в то время, как дальномерное сенсорное устройство 100 и обжимное соединение 104 перемещаются друг относительно друга. На этапе 804, блок 150 обработки сигналов формирует данные профиля поверхности по измеренным расстояниям. На этапе 806, данные профиля поверхности обжимного соединения 104 используются при оценке качества обжимного соединения 104.
Способ, показанный на фигуре 10, можно реализовать в форме решения логической схемы компьютерной программы. Компьютерная программа может находиться на дистрибутивном средстве для компьютерной программы для ее дистрибуции. Дистрибутивное средство компьютерной программы может считываться устройством обработки данных, и оно может кодировать команды компьютерной программы, чтобы управлять работой устройства измерений.
Дистрибутивное средство, в свою очередь, может быть, по существу известным решением для распространения компьютерной программы, например, носителем, считываемым процессором данных, носителем для хранения программ, памятью, считываемой процессором данных, дистрибутивным пакетом программного обеспечения, считываемым процессором данных, или упакованным программным пакетом, считываемым процессором данных. В некоторых случаях, дистрибутивный носитель может быть сигналом, считываемым процессором данных, или телекоммуникационным сигналом, считываемым процессором данных.
Несмотря на то, что изобретение описано выше со ссылкой на примеры в соответствии с прилагаемыми чертежами, следует понимать, что изобретение не ограничено приведенными примерами, а допускает модификацию множеством способов в пределах объема прилагаемой формулы изобретения.
Группа изобретений относится к области для определения качества обжимного соединения проводника. Устройство измерения обжимного соединения содержит блок обработки сигналов, дальномерное сенсорное устройство на основе использования оптического излучения и механизм перемещения, который перемещает сформированное обжимное соединение и дальномерное сенсорное устройство друг относительно друга. Дальномерное сенсорное устройство измеряет расстояние между дальномерным сенсорным устройством и обжимным соединением, в то время как дальномерное сенсорное устройство и механизм перемещения перемещаются друг относительно друга. Блок обработки сигналов формирует данные профиля поверхности на основе измеренных расстояний, использует данные профиля поверхности обжимного соединения, чтобы определять качество обжимного соединения, и отображает данные, относящиеся к обжимному соединению. Технический результат – повышение точности в измерении обжимных соединений проводников. 3 н. и 9 з.п. ф-лы, 10 ил.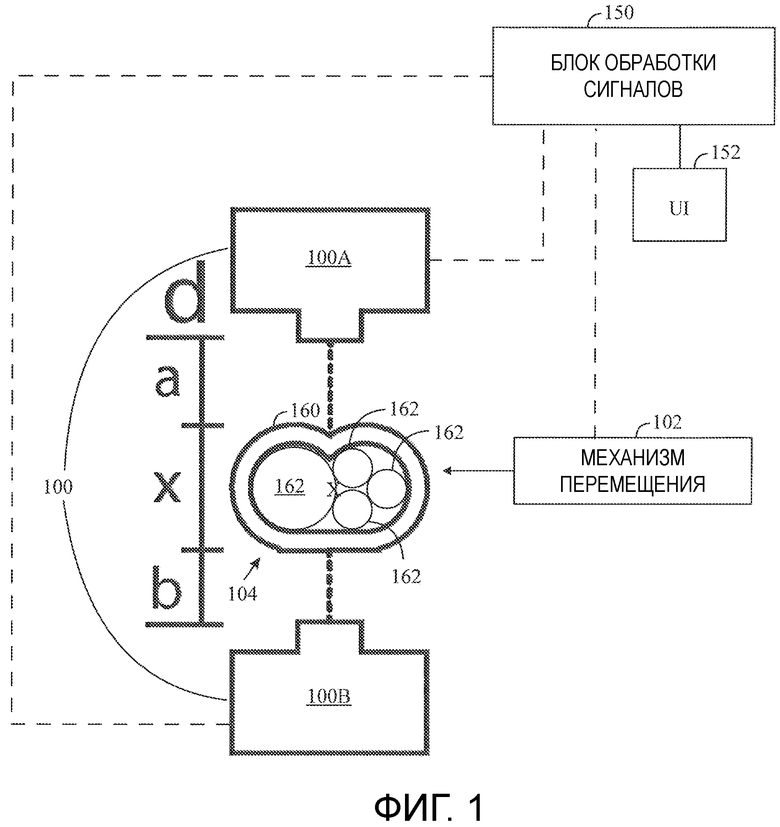
1. Сенсорное устройство для измерения обжимного соединения, характеризующееся тем, что сенсорное устройство содержит:
дальномерное сенсорное устройство (100) на основе использования оптического излучения, имеющее первый и второй сенсорные блоки, выполненные с возможностью обнаруживать проводник и обжимное соединение, включающее в себя проводник; и
механизм (102) перемещения, выполненный с возможностью перемещения каждого из проводника и обжимного соединения (104) относительно дальномерного сенсорного устройства (100),
причем первый сенсорный блок выполнен с возможностью обнаруживать проводник, когда проводник движется через первый сенсорный блок, для обеспечения сигнала для начала измерения проводника дальномерным сенсорным устройством, а второй сенсорный блок выполнен с возможностью обнаруживать проводник, когда проводник движется через второй сенсорный блок, для обеспечения сигнала для прекращения измерения проводника дальномерным сенсорным устройством,
первый сенсорный блок выполнен с возможностью обнаружения проводника (162) обжимного соединения (104), когда обжимное соединение движется через первый сенсорный блок, для обеспечения сигнала для начала измерения обжимного соединения дальномерным сенсорным устройством (100), а второй сенсорный блок выполнен с возможностью обнаружения проводника (162) обжимного соединения (104), когда обжимное соединение движется через второй сенсорный блок, для обеспечения сигнала для прекращения измерения обжимного соединения дальномерным сенсорным устройством (100),
дальномерное сенсорное устройство (100) выполнено с возможностью измерения расстояний между дальномерным сенсорным устройством (100) и множеством точек поверхности проводника, в то время как проводник движется относительно дальномерного сенсорного устройства с целью определения по меньшей мере одного из следующих свойств: размер проводника и форма проводника, и
дальномерное сенсорное устройство (100) выполнено с возможностью измерения расстояний между дальномерным сенсорным устройством (100) и множеством точек поверхности обжимного соединения (104), в то время как обжимное соединение (104) движется относительно дальномерного сенсорного устройства (100) с целью определения по меньшей мере одного из следующих свойств: размер обжимного соединения (104) и форма обжимного соединения (104).
2. Сенсорное устройство по п. 1, отличающееся тем, что дальномерное сенсорное устройство (100) выполнено с возможностью выполнения одного сканирования для измерения расстояний по обжимному соединению (104) в поперечном направлении относительно продольной оси проводника (162) обжимного соединения (104).
3. Сенсорное устройство по п. 1, отличающееся тем, что механизм (102) перемещения выполнен с возможностью однонаправленного перемещения обжимного соединения (104) в направлении продольной оси проводника (162) во время определения удаления.
4. Сенсорное устройство по п. 1, отличающееся тем, что дальномерное сенсорное устройство (100) содержит по меньшей мере два датчика (100A, 100B) дальности, из которых каждый выполнен с возможностью измерения каждой точки измерения обжимного соединения (104) с разных направлений относительно одного или более других датчиков (100A, 100B) дальности.
5. Устройство измерения обжимного соединения, характеризующееся тем, что устройство измерения содержит:
блок (150) обработки сигналов;
дальномерное сенсорное устройство (100) на основе использования оптического излучения, имеющее первый и второй сенсорные блоки, выполненные с возможностью обнаруживать проводник и обжимное соединение, включающее в себя проводник;
механизм (102) перемещения, выполненный с возможностью перемещения каждого из проводника и обжимного соединения (104) относительно дальномерного сенсорного устройства;
причем первый сенсорный блок выполнен с возможностью обнаруживать проводник, когда проводник движется через первый сенсорный блок, для обеспечения сигнала для начала измерения проводника дальномерным сенсорным устройством, а второй сенсорный блок выполнен с возможностью обнаруживать проводник, когда проводник движется через второй сенсорный блок, для обеспечения сигнала для прекращения измерения проводника дальномерным сенсорным устройством,
первый сенсорный блок выполнен с возможностью обнаружения проводника (162) обжимного соединения (104), когда обжимное соединение движется через первый сенсорный блок, для обеспечения сигнала для начала измерения обжимного соединения дальномерным сенсорным устройством (100), и второй сенсорный блок выполнен с возможностью обнаружения проводника (162) обжимного соединения, когда обжимное соединение движется через второй сенсорный блок, для обеспечения сигнала для прекращения измерения обжимного соединения дальномерным сенсорным устройством (100),
дальномерное сенсорное устройство (100) выполнено с возможностью измерения расстояний между дальномерным сенсорным устройством (100) и множеством точек поверхности проводника, в то время как проводник движется относительно дальномерного сенсорного устройства,
дальномерное сенсорное устройство (100) выполнено с возможностью измерения расстояний между дальномерным сенсорным устройством и множеством точек поверхности обжимного соединения (104), в то время как обжимное соединение (104) движется относительно дальномерного сенсорного устройства (100),
блок (150) обработки сигналов выполнен с возможностью формирования данных профиля поверхности на основе измеренных расстояний между дальномерным сенсорным устройством и множеством точек поверхности обжимного соединения и использования данных профиля поверхности обжимного соединения (104), чтобы определять по меньшей мере одно из следующих свойств: размер обжимного соединения (114) и форму обжимного соединения (104), и отображать данные, относящиеся к по меньшей мере одному полученному свойству обжимного соединения (104); и
блок обработки сигналов выполнен с возможностью формирования данных профиля поверхности на основе измеренных расстояний между дальномерным сенсорным устройством и множеством точек поверхности проводника и использования данных профиля поверхности на основе измеренных расстояний между дальномерным сенсорным устройством и множеством точек поверхности проводника вместе с данными профиля поверхности на основе измеренных расстояний между дальномерным сенсорным устройством и множеством точек поверхности обжимного соединения для определения качества обжимного соединения.
6. Устройство измерения по п. 5, отличающееся тем, что блок (150) обработки сигналов выполнен с возможностью нахождения по меньшей мере одной точки обжимного соединения (104), которая имеет по меньшей мере одно из следующих свойств: наибольший диаметр обжимного соединения и наименьший диаметр обжимного соединения; и использования свойств в качестве основы для данных оценки качества обжимного соединения (104).
7. Устройство измерения по п. 5, отличающееся тем, что блок (150) обработки сигналов выполнен с возможностью определения формы профиля поверхности обжимного соединения (104) и использования упомянутой формы профиля поверхности обжимного соединения (104) в качестве основы для данных оценки качества обжимного соединения (104).
8. Способ измерения для измерения обжимного соединения, характеризующийся тем, что упомянутый способ содержит этапы, на которых:
перемещают механизмом перемещения проводник относительно дальномерного сенсорного устройства, имеющего первый и второй сенсорные блоки;
обнаруживают первым сенсорным блоком дальномерного сенсорного устройства проводник, когда проводник движется через первый сенсорный блок, для обеспечения сигнала для начала измерения проводника дальномерным сенсорным устройством;
измеряют дальномерным сенсорным устройством, использующим оптическое излучение, расстояния между дальномерным сенсорным устройством и разными точками измерения поверхности проводника, в то время как проводник движется относительно дальномерного сенсорного устройства;
обнаруживают вторым сенсорным блоком дальномерного сенсорного устройства проводник, когда проводник движется через второй сенсорный блок, для обеспечения сигнала для прекращения измерения проводника дальномерным сенсорным устройством;
формируют блоком обработки сигналов данные профиля поверхности проводника на основе измеренных расстояний между дальномерным сенсорным устройством и разными точками измерения поверхности проводника;
используют данные профиля поверхности проводника для определения по меньшей мере одного из следующих свойств: размера проводника и формы проводника;
устанавливают обжимной соединитель на конец проводника для формирования обжимного соединения, включающего в себя проводник;
перемещают (800) механизмом (102) перемещения обжимное соединение (104) относительно дальномерного сенсорного устройства (100);
обнаруживают первым сенсорным блоком проводник (162) обжимного соединения (104), когда обжимное соединение движется через первый сенсорный блок, для обеспечения сигнала для начала измерения обжимного соединения дальномерным сенсорным устройством (100);
измеряют (802) дальномерным сенсорным устройством (100), использующим оптическое излучение, расстояния между дальномерным сенсорным устройством и разными точками измерения поверхности обжимного соединения (104), в то время как обжимное соединение (104) движется относительно дальномерного сенсорного устройства (100);
обнаруживают вторым сенсорным блоком проводник (162) обжимного соединения, когда обжимное соединение движется через второй сенсорный блок, для обеспечения сигнала для прекращения измерения обжимного соединения дальномерным сенсорным устройством (100);
формируют (804) блоком (150) обработки сигналов данные профиля поверхности обжимного соединения на основе измеренных расстояний между дальномерным сенсорным устройством и разными точками измерения поверхности обжимного соединения; и
используют (806) данные профиля поверхности обжимного соединения (104) для определения по меньшей мере одного из следующих свойств: размера обжимного соединения (104) и формы обжимного соединения (104).
9. Сенсорное устройство по п. 1, отличающееся тем, что механизм (102) перемещения выполнен с возможностью поворота обжимного соединения (104) относительно дальномерного сенсорного устройства (100) с центром поворота, расположенным внутри обжимного соединения (104).
10. Сенсорное устройство по п. 1, отличающееся тем, что механизм (102) перемещения выполнен с возможностью поворота обжимного соединения (104) относительно дальномерного сенсорного устройства (100) с центром поворота, расположенным снаружи обжимного соединения (104).
11. Способ измерения по п. 8, в котором этап перемещения (800) обжимного соединения дополнительно задан как поворот обжимного соединения (104) относительно дальномерного сенсорного устройства (100) с центром поворота, расположенным внутри обжимного соединения (104).
12. Способ измерения по п. 8, в котором этап перемещения (800) обжимного соединения дополнительно задан как поворот обжимного соединения (104) относительно дальномерного сенсорного устройства (100) с центром поворота, расположенным снаружи обжимного соединения (104).
| US 7794292 B2, 14.09.2010 | |||
| WO 2014023879 A1, 13.02.2014 | |||
| Способ изготовления криволинейных элементов | 1978 |
|
SU667658A1 |
| US 2014041200 A1, 13.02.2014. | |||

