Изобретение относится к нефтедобывающей промышленности для поддержания пластового давления на многопластовых месторождениях и может быть использовано при закачке рабочего агента на многопластовом месторождении одной скважиной.
Известен способ для одновременно-раздельной и поочередной эксплуатации пластов одной нагнетательной скважиной (патент №2253009, МПК Е21В 43/14, приор. 11.09.2003), выбранный в качестве прототипа заявляемому способу, заключающийся в том, что спускают в скважину, по крайней мере, одну колонну труб с постоянным или переменным диаметром без или с заглушенным концом, по меньшей мере, с одним спущенным ниже верхнего пласта пакером гидравлического и/или механического действия без или с разъединителем колонны. Ниже и выше пакера спущены, по крайней мере, по одному посадочному узлу в виде скважинной камеры или ниппелю со съемным клапаном (извлекаемым регулирующим узлом) для подачи через них рабочего агента соответственно в нижний и верхний пласты, посадку пакера и опрессовку его снизу и/или сверху. Определяют при опрессовке минимальное давление поглощения каждого пласта. Закачивают рабочий агент с устья в полость колонны труб при заданном давлении, направляя его в верхний и/или нижний пласты через соответствующие съемные клапаны (извлекаемые регулирующие узлы) в посадочных узлах. Измеряют на поверхности общий расход рабочего агента, устьевое давление и/или температуру в полости колонны труб и за трубном пространстве скважины. Определяют забойное давление верхнего пласта, давление в колонне труб и затрубном пространстве на глубине съемного клапана (извлекаемого регулирующего узла) в посадочном узле выше пакера. Находят расход рабочего агента, закачиваемого в верхний пласт через съемный клапан (извлекаемый регулирующий узел), вычитывают его из общего и определяют расход рабочего агента, закачиваемого в нижний пласт. Сопоставляют фактические расходы рабочего агента для пластов с проектными их значениями. При этом при их отличии изменяют устьевое давление и/или извлекают для одного или обоих пластов съемные клапаны (извлекаемые регулирующие узлы) из посадочных узлов с помощью канатной техники. Определяют и изменяют их характеристики и/или параметры. После этого повторно устанавливают каждый съемный клапан (извлекаемый регулирующий узел) в соответствующий посадочный узел с помощью канатной техники и продолжают закачку рабочего агента через них в соответствующие пласты.
К недостаткам известного способа относится то, что нет канала связи с наземным устройством поэтому приходится извлекать, а затем устанавливать съемные клапаны, что очень трудоемко. Так же способ не позволяет управлять закачкой рабочего агента в режиме реального времени и без остановки закачки (измерять, определять и регулировать его расход) для каждого из пластов одной скважины.
Известен способ и устройство для регулируемой закачки жидкости по пластам (патент №2495235, МПК Е21В 43/14, приор. 06.03.2012), включающий спуск в скважину на колонне труб пакеров механического действия без или с разъединителем колонны, посадку пакеров и их опрессовку, закачку жидкости с устья в полость колонны труб, определение суммарного расхода жидкости, закачиваемой в верхний и нижний пласты, замер расхода жидкости по одному из пластов, определение расхода жидкости по другому пласту вычитанием ранее замеренного расхода из суммарного расхода, подъем извлекаемого регулирующего узла на поверхность, изменение его характеристик, повторную установку извлекаемого регулирующего узла и закачку через него жидкости в соответствующие пласты, при этом в скважину на колонне насосно-компрессорных труб - НКТ спускают компоновку подземного оборудования, включающую нижний пакер, разъединитель, устройство распределения закачки - УРЗ, верхний пакер, разъединитель, устанавливают нижний и верхний пакеры, проводят опрессовку, спускают глубинный расходомер и пробку выше посадочного места последней, осуществляют подачу жидкости в полость НКТ, замеряют общий расход жидкости, закачиваемой в нижний и верхний пласты, затем опускают пробку в посадочное место, осуществляют подачу жидкости в полость НКТ, определяют расход жидкости, закачиваемой в нижний пласт, вычитают расход жидкости, закачиваемой в нижний пласт, из общего расхода и находят расход жидкости, закачиваемой в верхний пласт, сопоставляют фактические расходы жидкости для пластов с заданными значениями, причем при их отличии поднимают извлекаемую часть УРЗ на поверхность при помощи ловильного инструмента на геофизическом кабеле, проволоке или колтюбинговой установке, далее в посадочные места извлекаемой части УРЗ устанавливают верхний и нижний штуцеры, опускают извлекаемую часть УРЗ в НКТ до ее посадки в корпусную часть УРЗ и осуществляют регулируемую закачку жидкости, по окончании работ производят подъем установки.
К недостаткам известного способа относится то, что нет канала связи с наземным устройством поэтому приходится извлекать регулирующий узел на поверхность, а затем, после изменение его характеристик, повторно устанавливать ее, что очень трудоемко. Так же способ не позволяет управлять закачкой рабочего агента в режиме реального времени и без остановки закачки (измерять, определять и регулировать его расход) для каждого из пластов одной скважины.
Техническим результатом настоящего изобретения является повышение эффективности управления процессом закачки рабочего агента в многопластовую скважину и, как следствие, повышение оперативности реагирования регулирующих устройств, увеличение срока безаварийной работы технологического оборудования, а также повышение надежности и сокращение сроков монтажа и ремонтных работ технологического оборудования.
Технический результат достигается осуществлением способа управления процессом закачки рабочего агента для поддержания давления среды в многопластовой скважине, включающий спуск в скважину колонны труб, оснащенной между пластами пакером и регулирующим устройством, при этом в скважине на уровне пласта оснащают колонну труб или регулирующее устройство измерительным преобразователем, закачивают рабочий агент, направляя его через регулирующее устройство и измерительный преобразователь, получают информацию по замеру от измерительного преобразователя и определяют технологические параметры рабочего агента для пласта, а при их отличии от проектного значения изменяют пропускное сечение регулирующего устройства до достижения проектного значения технологических параметров для каждого из пластов, характеризуется тем, что измерительный преобразователь и регулирующее устройство соединяют с глубинным блоком управления закачкой рабочего агента (далее ГБ), который по каналу связи передает значение технологических параметров на станцию управления, расположенную в устье скважины, где эта информация поступает на контроллер станции управления (КСУ) и наземный блок управления, который принимает и обрабатывает информацию, далее проводит анализ и формирование управляющего сигнала для регулирующего устройства и по каналу связи передается на ГБ, вся полученная и переданная информация в режиме реального времени отражается на КСУ, а затем сохраняется на запоминающем устройстве с возможностью просмотра всей поступившей информации в любое время, при этом ГБ осуществляет сбор и обработку информации от регулирующего устройства и измерительного преобразователя, проводит анализ поступившей информации и в соответствии с алгоритмом программы, при необходимости срочного решения проблемы, формирует управляющий сигнал для регулирующего устройства, а также отправляет полученную информацию по каналу связи через КСУ на наземный блок управления.
ГБ содержит устройство питания и передачи данных (УПД), осуществляющее защиту от перенапряжения и выделение информационной составляющей сигнала от напряжения питания, которое поступает на стабилизированные источники питания ГБ, информационная часть сигнала поступает на устройство управления ГБ, которое производит опрос текущих параметров измерительных преобразователей и осуществляет управление регулирующими устройствами в соответствии с запрограммированным алгоритмом или по команде со станции управления, в ответ со станции управления устройство управления ГБ формирует пакет данных, который кодируется в соответствии с интерфейсом связи в УПД и поступает по каналу связи на станцию управления.
При отсутствии связи со станцией управления - ГБ автоматически управляет регулирующими устройствами для поддержания проектных значений технологических параметров.
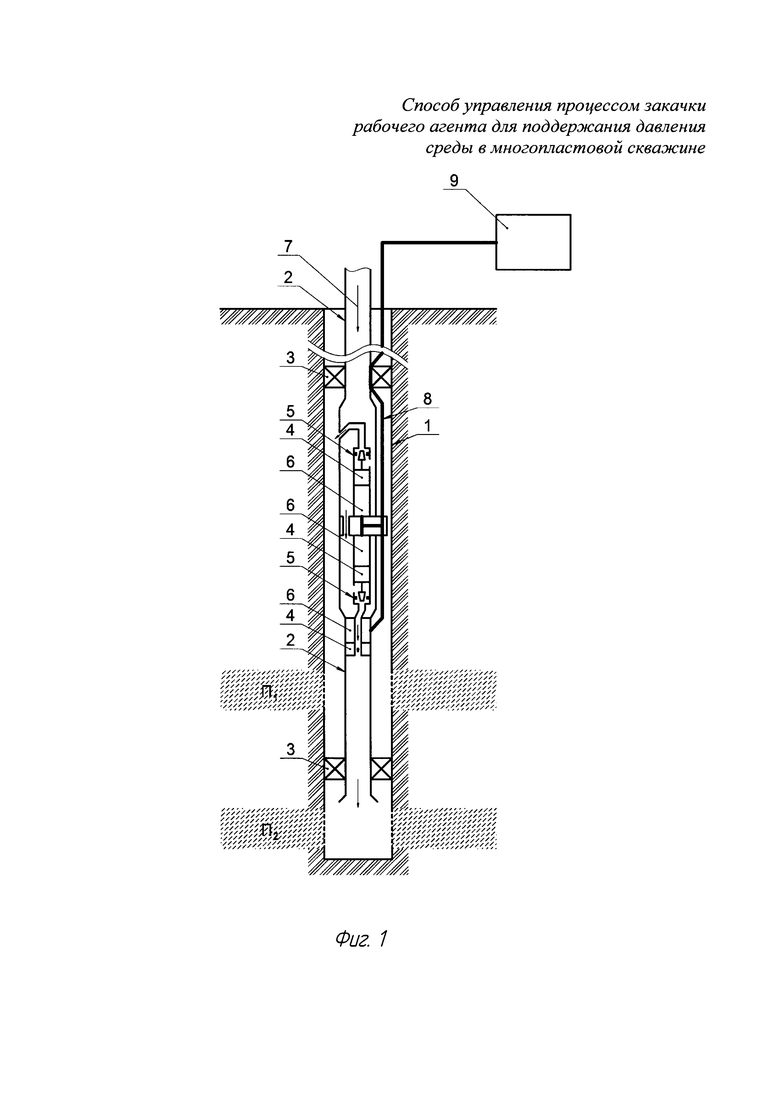
Заявленное техническое решение поясняется следующими материалами. На Фиг. 1 представлен принципиальный вид устройства для реализации заявленного способа (изображена пакерная установка с двумя измерительными преобразователями и регулирующими устройствами), которое состоит из: скважины 1, колонны труб 2, пакера 3, измерительного преобразователя 4, регулирующего устройства 5, глубинного блока управления 6 (ГБ) закачкой рабочего агента 7, который по каналу связи 8 соединен со станцией управления 9.
Способ управления процессом закачки рабочего агента 7 реализуется следующим образом. В многопластовую скважину 1 спускают одну колонну труб 2 с постоянным диаметром. Колонну труб 2 оснащают между пластами П1, П2 одним или несколькими пакерами 3, а также одним или несколькими регулирующими устройствами 5 для управления расходом рабочего агента 7 при закачке его в пласты на уровне одного П1 или нескольких П1 и П2, или прочих пластов скважины, оснащают колонну труб 2 одним, или несколькими, измерительным(и) преобразователем(ами) 4 и регулирующим(ими) устройством(амии) 5, которые подключают к глубинному(ым) блоку(ам) управления 6. При этом ГБ 6 располагают непосредственно в скважине над пластом и связывают каналом связи 8 со станцией управления 9. ГБ 6 программируют на поддержание давления в каждом пласте многопластовой скважины 1. После монтажа скважины 1 закачивают рабочий агент 7, указанный на Фиг. 1 стрелкой, направленной вниз в верхней части Фиг Л, направляя его через одно или несколько измерительных преобразователей 4 и через одно или несколько регулирующих устройств 5. При этом ГБ 6 получает информацию по замеру (например, давления, температуры, перепада давления, перепада температуры, количества воды и пр.) измерительным(и) преобразователем(ами) 4 и определяет расход рабочего агента 7 для всех пластов скважины 1, а при отличии технологических параметров от проектного значения изменяет пропускное сечение одного или нескольких регулирующих устройств 5 до достижения их проектного значения.
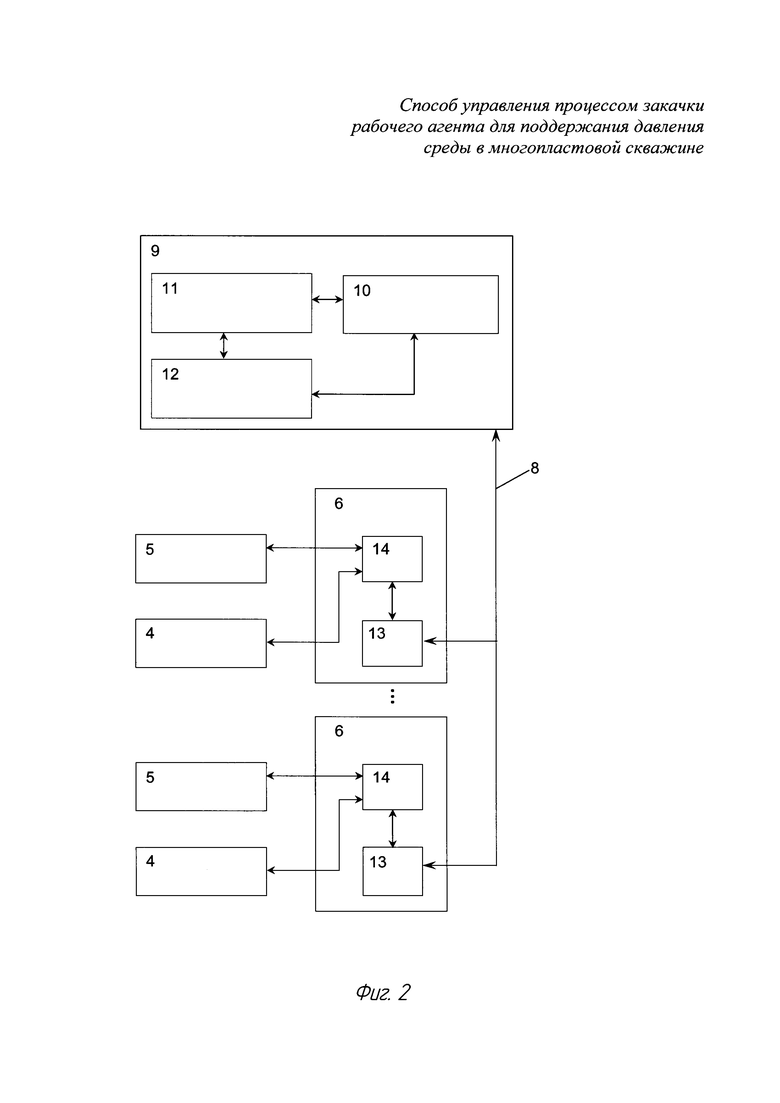
На Фиг. 2 приведена принципиальная блок-схема системы управления закачкой рабочего агента заявленного технического решения, состоящая из следующих элементов: измерительного преобразователя 4, регулирующего устройства 5, глубинного блока управления 6, канала связи 7, станции управления 9, содержащей контроллер станции управления (КСУ) 10, наземный блок управления 11 и запоминающее устройство 12.
Система управления закачкой рабочего агента работает следующим образом: информация с каждого из измерительного(ых) преобразователя(ей) 4 поступает в свой ГБ 6 далее в соответствии с запрограммированным алгоритмом и выполняемой задачей производится анализ поступившей информации и передача ее по каналу связи 8 через КСУ 10 на наземный блок управления 11 для формирования управляющих сигналов для регулирующего(их) устройства(в) 5 и для сохранения поступившей информации в запоминающее устройство 12 станции управления 9.
Кроме того, наземный блок управления 11 по результатам обработки информации автоматически отправляет команды на управление регулирующим(и) устройством(ами) 5 ГБ 6 до достижения проектных значений технологических параметров. КСУ 10 через интерфейс связи с наземным блоком управления 11 отображает текущие параметры с измерительного(ых) преобразователя(ей) 4, информацию о состоянии регулирующих устройств 5, диагностическую информацию о состоянии ГБ 6, а также передает упомянутые параметры и информацию на диспетчерский пункт (на схеме не показан) для системы мониторинга. Кроме того, КСУ 10 сигнализирует об отклонении контролируемых параметров от установленных значений. Через КСУ 10 осуществляется ручное управление параметрами регулирующих устройств 5 как непосредственно с органов управления КСУ 10, так и удаленно с диспетчерского пункта. Станция управления 9 связана с глубинным блоком управления 6 каналом связи 8, через который осуществляется питание глубинного блока управления 6 и двухсторонний обмен информацией со станцией управления 9. Канал связи 8 состоит из одной или нескольких жил, каждая из которых связывает станцию управления 9 и один или несколько ГБ 6. В состав ГБ 6 входят: устройство питания и передачи данных 13 (УПД), осуществляющее защиту от перенапряжения и выделение информационной составляющей сигнала от напряжения питания, которое поступает на стабилизированные источники питания ГБ 6 (на фиг. 2 не показаны), устройство управления 14 ГБ 6, которое производит опрос текущих параметров измерительных преобразователей 4, и осуществляет управление регулирующими устройствами 5 в соответствии с запрограммированным алгоритмом или по команде со станции управления 9. В ответ на запрос со станции управления 9 устройство управления 14 формирует пакет данных, который кодируется в соответствии с интерфейсом связи в УПД 13 и поступает по каналу связи 8 на станцию управления 9. При отсутствии связи с наземным блоком управления 11, например, в результате аварии, каждый из ГБ 6 автоматически управляет регулирующим(и) устройством(ами) 5 для поддержания проектных значений технологических параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЗАКАЧКИ РАБОЧЕГО АГЕНТА, УСТАНОВКА И РЕГУЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2681719C1 |
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЭКСПЛУАТАЦИИ МНОГОПЛАСТОВЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2440488C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРУЕМОЙ ЗАКАЧКИ ЖИДКОСТИ ПО ПЛАСТАМ | 2012 |
|
RU2495235C1 |
| СКВАЖИННАЯ УСТАНОВКА С СИСТЕМОЙ КОНТРОЛЯ И УПРАВЛЕНИЯ ЭКСПЛУАТАЦИЕЙ МЕСТОРОЖДЕНИЙ | 2014 |
|
RU2569390C1 |
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЭКСПЛУАТАЦИИ МНОГОПЛАСТОВЫХ СКВАЖИН | 2006 |
|
RU2313659C1 |
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЗАКАЧКИ ЖИДКОСТИ ПО ПЛАСТАМ С ВОЗМОЖНОСТЬЮ ЗАМЕРА ПАРАМЕТРОВ ЗАКАЧИВАЕМОЙ ЖИДКОСТИ И УСТАНОВКА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2552405C1 |
| СПОСОБ И КОМПОНОВКА ДЛЯ РЕГУЛИРУЕМОЙ ЗАКАЧКИ ЖИДКОСТИ ПО ПЛАСТАМ | 2017 |
|
RU2636842C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРУЕМОЙ ЗАКАЧКИ ЖИДКОСТИ ПО ПЛАСТАМ С АВТОМАТИЗИРОВАННЫМ ЗАМЕРОМ ПАРАМЕТРОВ ПРОЦЕССА | 2015 |
|
RU2610484C9 |
| СПОСОБ ЭКСПЛУАТАЦИИ НАГНЕТАТЕЛЬНОЙ СКВАЖИНЫ МАЛОГО ДИАМЕТРА С ОДНОЛИФТОВОЙ ДВУХПАКЕРНОЙ КОМПОНОВКОЙ | 2017 |
|
RU2678745C1 |
| СПОСОБ РЕГУЛИРУЕМОЙ ЗАКАЧКИ ЖИДКОСТИ ПО ПЛАСТАМ (ВАРИАНТЫ) | 2016 |
|
RU2634317C1 |
Изобретение относится к нефтедобывающей промышленности и может быть применено для закачки рабочего агента на многопластовом месторождении одной скважиной. Способ включает спуск в скважину колонны труб, закачку рабочего агента, направляя его через регулирующее устройство, и измерительный преобразователь, получение информации по замеру от измерительного преобразователя и определение технологических параметров рабочего агента для пласта, а при их отличии от проектного значения изменяют пропускное сечение регулирующего устройства до достижения проектного значения технологических параметров для каждого из пластов. Измерительный преобразователь и регулирующее устройство соединяют с глубинным блоком управления закачкой рабочего агента (ГБ), который по каналу связи передает значение технологических параметров на станцию управления, расположенную в устье скважины, где эта информация поступает на контроллер станции управления (КСУ) и наземный блок управления, который принимает и обрабатывает информацию, далее проводит анализ и формирование управляющего сигнала для регулирующего устройства и по каналу связи передается на ГБ, вся полученная и переданная информация в режиме реального времени отражается на КСУ, а затем сохраняется на запоминающем устройстве с возможностью просмотра всей поступившей информации в любое время, при этом ГБ осуществляет сбор и обработку информации от регулирующего устройства и измерительного преобразователя, проводит анализ поступившей информации и в соответствии с алгоритмом программы, при необходимости срочного решения проблемы, формирует управляющий сигнал для регулирующего устройства, а также отправляет полученную информацию по каналу связи через КСУ на наземный блок управления. Технический результат заключается в повышении эффективности управления процессом закачки рабочего агента в многопластовую скважину. 2 ил.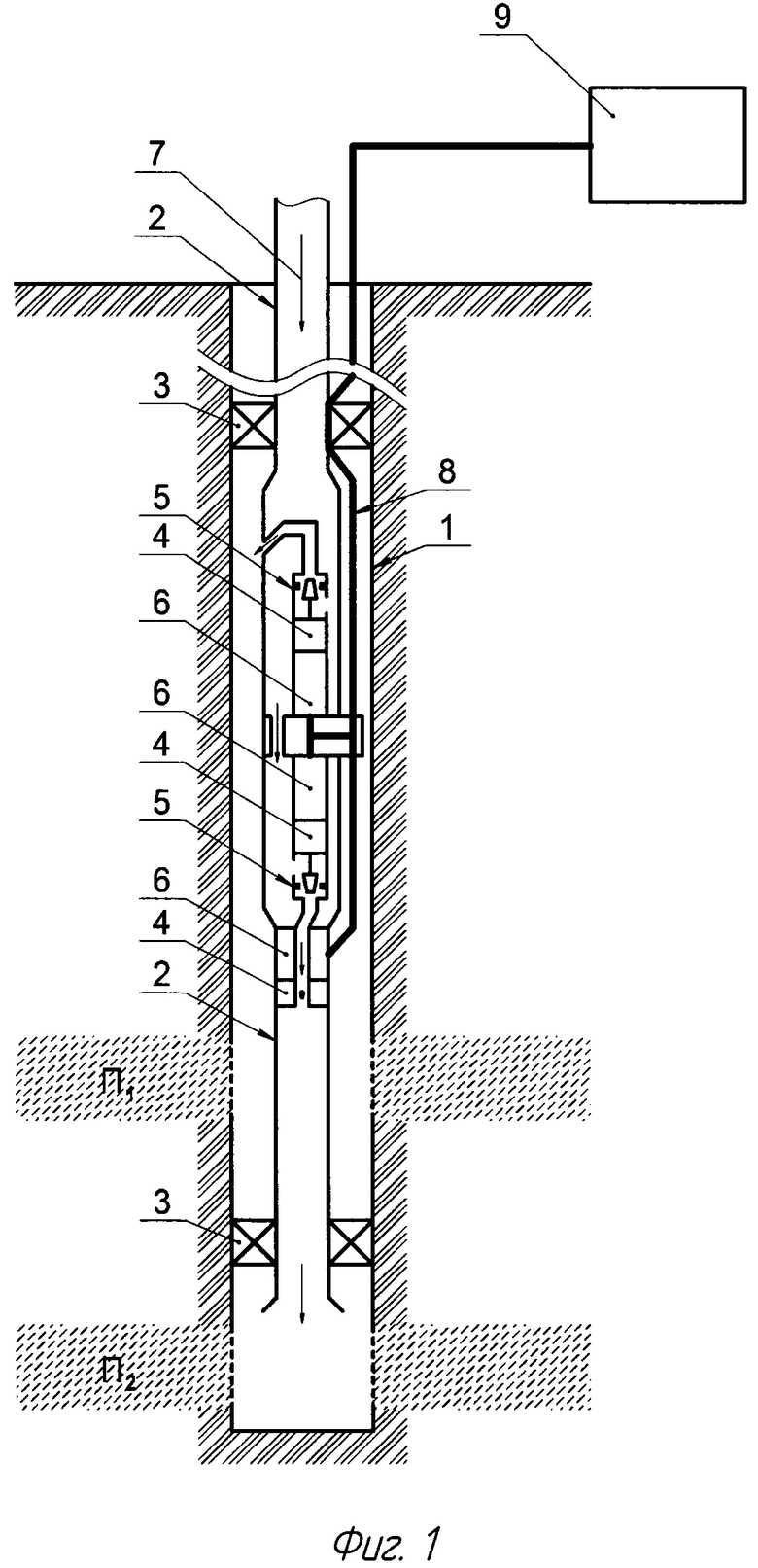
Способ управления процессом закачки рабочего агента для поддержания давления среды в многопластовой скважине, включающий спуск в скважину колонны труб, оснащенной между пластами пакером и регулирующим устройством, при этом в скважине на уровне пласта оснащают колонну труб или регулирующее устройство измерительным преобразователем, закачивают рабочий агент, направляя его через регулирующее устройство и измерительный преобразователь, получают информацию по замеру от измерительного преобразователя и определяют технологические параметры рабочего агента для пласта, а при их отличии от проектного значения изменяют пропускное сечение регулирующего устройства до достижения проектного значения технологических параметров для каждого из пластов, отличающийся тем, что у каждого пласта устанавливают измерительный преобразователь и регулирующее устройство, соединяя их с глубинным блоком управления закачки рабочего агента - ГБ, который по каналу связи передает значение технологических параметров на станцию управления, расположенную в устье скважины и содержащую наземный блок управления и контроллер станции управления - КСУ, при этом ГБ осуществляет сбор и обработку информации от регулирующего устройства и измерительного преобразователя, далее проводит анализ поступившей информации и, в соответствии с алгоритмом программы при необходимости срочного решения проблемы, формирует управляющий сигнал для регулирующего устройства, а также отправляет полученную информацию по каналу связи через КСУ на наземный блок управления, который принимает и обрабатывает информацию, далее проводит анализ и формирование управляющего сигнала для регулирующего устройства, вся информация отражается на КСУ и сохраняется на запоминающем устройстве с возможностью просмотра всей поступившей информации в любое время, при этом ГБ содержит устройство питания и передачи данных - УПД, осуществляющее защиту от перенапряжения и выделение информационной составляющей сигнала от напряжения питания, которое поступает на стабилизированные источники питания ГБ, информационная часть сигнала поступает на устройство управления ГБ, которое производит опрос текущих параметров измерительных преобразователей и осуществляет управление регулирующими устройствами в соответствии с запрограммированным алгоритмом или по команде со станции управления, в ответ на запрос со станции управления устройство управления ГБ формирует пакет данных, который кодируется в соответствии с интерфейсом связи в УПД и поступает по каналу связи на станцию управления.
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРУЕМОЙ ЗАКАЧКИ ЖИДКОСТИ ПО ПЛАСТАМ | 2012 |
|
RU2495235C1 |
| СПОСОБ ШАРИФОВА ДЛЯ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ И ПООЧЕРЕДНОЙ ЭКСПЛУАТАЦИИ НЕСКОЛЬКИХ ПЛАСТОВ ОДНОЙ НАГНЕТАТЕЛЬНОЙ СКВАЖИНОЙ | 2003 |
|
RU2253009C1 |
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЭКСПЛУАТАЦИИ МНОГОПЛАСТОВЫХ СКВАЖИН | 2006 |
|
RU2313659C1 |
| СПОСОБ ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЭКСПЛУАТАЦИИ МНОГОПЛАСТОВЫХ СКВАЖИН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2440488C2 |
| УСТАНОВКА ОДНОВРЕМЕННО-РАЗДЕЛЬНОЙ ЭКСПЛУАТАЦИИ МНОГОПЛАСТОВОЙ СКВАЖИНЫ С ТЕЛЕМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2012 |
|
RU2512228C1 |
| WO 1998013579 A2, 02.04.1998. | |||

