Предлагаемое изобретение относится к электротехнике и предназначено для использования на горных предприятиях с целью повышения надежности работы электрооборудования при перегоне экскаваторов путем контроля рекуперированной и потребляемой от автономных дизель-генераторных станций энергии.
Известны способы управления электрооборудованием при перегоне экскаватора, при которых используют мобильную автономную дизель-генераторную станцию с расположенным на шасси автомобиля вместе с дизель-генераторной станцией преобразователем напряжения, подключаемым к двигателям хода экскаватора с помощью гибкого кабеля, и регулируют напряжение на двигателях хода с помощью преобразователя (патент РФ №2330958, МПК Е01С 47/00, 2008; патент РФ на полезную модель №133872, МПК E02F 7/00; Е21С 33/00, 2013).
Известные способы позволяют выполнять перегон экскаваторов на горном предприятии при использовании низковольтного генератора автономной станции (0,4 кВ). При этом основное и вспомогательное электрооборудование экскаватора к источнику электропитания не подключается, работают только двигатели хода. Управление скоростью двигателей хода осуществляется оператором мобильной станции.
Известные способы перегона характеризуются рядом недостатков.
Для организации перегона экскаватора требуется демонтаж электрической схемы привода хода и подключение двигателей специальным кабелем к дизель-генераторной станции. При этом для разных экскаваторов двигатели хода различаются по мощности и роду тока (постоянного и переменного тока), поэтому в разных случаях необходимо применение различных типов кабелей. Преобразователи управления также должны быть разными: постоянного или переменного тока. При этом в случае подключения разных экскаваторов требуется адаптация системы управления преобразователя к двигателям хода. В результате этого усложняется процесс организации перегона и снижается качество управления приводом хода.
При перегоне экскаватора происходит как потребление энергии от автономного генератора, так и рекуперация энергии при торможении и движении под уклон. При известных способах рекуперированная энергия поступает от двигателей непосредственно к выходу преобразователя. Для диссипации рекуперированной энергии требуется использование специальных балластных резисторов, т.е., вся рекуперированная энергия преобразуется в теплоту. Процесс рекуперации при этом является не контролируемым. Это представляет опасность для электрооборудования из-за возможного возникновения перенапряжений.
Перегон экскаватора происходит при полном отключении главных приводов и вспомогательного оборудования. Поэтому отсутствует возможность изменения положения стрелы и платформы, освещения, вентиляции и обогрева экскаватора, а также использования информационно-диагностической системы для контроля состояния оборудования и включения системы удаленного мониторинга экскаватора.
Следовательно, недостатками известных способов управления электрооборудованием при перегоне экскаватора являются низкая надежность работы электрооборудования из-за отсутствия контроля рекуперированной и потребляемой энергии, сложность организации процедуры перегона, низкое качество управления приводом хода и отсутствие возможности оперативного управления стрелой и платформой экскаватора, использования систем освещения, вентиляции и обогрева машины.
Из известных технических решений наиболее близким к предлагаемому по достигаемому результату является способ управления электрооборудованием при перегоне экскаватора, при котором используют автономную дизель-генераторную станцию с выходным напряжением питания экскаватора, подключаемую к экскаватору с помощью гибкого кабеля, и регулируют напряжение на двигателях хода с помощью командоаппаратов с пульта машиниста экскаватора (Инструкция по наладке и эксплуатации экскаваторной перегонной оперативной станции напряжением 6 кВ. Открытое акционерное общество «Апатит». - Кировск, 2004. - 25 с.).
При реализации известного способа управления электрооборудованием перегон экскаваторов на горном предприятии осуществляется при использовании высоковольтного генератора автономной станции (6,3 кВ), подключаемого к экскаватору с помощью штатного высоковольтного кабеля. При этом к источнику электропитания подключается все основное и вспомогательное электрооборудование экскаватора. Управление скоростью двигателей хода осуществляется машинистом с пульта экскаватора с помощью штатных преобразователей управления электроприводами хода.
При перегоне экскаватора происходит как потребление энергии от автономного генератора, так и рекуперация энергии при торможении и движении под уклон. При известном способе рекуперированная энергия поступает от двигателей хода через преобразователи и компоненты системы электропитания и кабель к синхронному генератору автономной дизель-генераторной станции. Рекуперированная энергия при этом преобразуется частично в электрооборудовании экскаватора, а также преобразуется генератором станции, работающем при рекуперации в двигательном режиме, и механическую энергию вращения коленчатого вала дизельного двигателя. Процесс рекуперации при этом является не контролируемым. Это представляет опасность для электрооборудования из-за возможного возникновения перенапряжений, а также может вызвать аварийное отключение дизельного двигателя.
Таким образом, недостатком известного способа является низкая надежность работы электрооборудования из-за отсутствия контроля рекуперированной и потребляемой энергии.
Цель предполагаемого изобретения - повышение надежности работы электрооборудования путем организации контроля рекуперированной энергии.
Поставленная цель достигается тем, что в известном способе управления электрооборудованием при перегоне экскаватора, при котором используют автономную дизель-генераторную станцию с выходным напряжением питания экскаватора, подключаемую к экскаватору с помощью гибкого кабеля, и регулируют напряжение на двигателях хода с помощью командоаппаратов с пульта машиниста, дополнительно измеряют активную мощность Р на вводе экскаватора, сравнивают измеренное значение с первой и второй уставками соответственно  и Р2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηс.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока, при Р≤Р1 и Р≥Р2 формируют сигнал для привода хода, обеспечивающий ограничение активной мощности в соответствии с условием Р1≤Р≤Р2 путем снижения скорости передвижения экскаватора, и отображают график текущего значения мощности одновременно со значениями уставок Р1 и Р2 на мониторе машиниста.
и Р2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηс.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока, при Р≤Р1 и Р≥Р2 формируют сигнал для привода хода, обеспечивающий ограничение активной мощности в соответствии с условием Р1≤Р≤Р2 путем снижения скорости передвижения экскаватора, и отображают график текущего значения мощности одновременно со значениями уставок Р1 и Р2 на мониторе машиниста.
По сравнению с наиболее близким аналогичным техническим решением предлагаемое решение имеет следующие новые признаки:
- измеряют активную мощность Р на вводе экскаватора;
- сравнивают измеренное значение активной мощности Р на вводе экскаватора с первой и второй уставками соответственно  и Р2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηc.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока;
и Р2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηc.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока;
при Р≤P1 и Р≥Р2 формируют сигнал для привода хода, обеспечивающий снижение скорости передвижения экскаватора и ее ограничение в диапазоне, соответствующем мощности Р1≤Р≤Р2;
- отображают график текущего значения мощности одновременно со значениями уставок Р1 и Р2 на мониторе машиниста.
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
По каждому из отличительных признаков проведен поиск известных технических решений в области электротехники, автоматики и горного дела.
Операция измерения активной мощности на вводе экскаватора известна и используется для контроля потребляемой электроэнергии (Тангаев И.А. Энергоемкость процессов добычи и переработки полезных ископаемых /М., Недра, 1986, с. 27-31).
Операция сравнения измеренного значения активной мощности Р на вводе экскаватора с первой и второй уставками соответственно  и Р2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηс.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока, в известных устройствах аналогичного назначения не обнаружена.
и Р2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηс.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока, в известных устройствах аналогичного назначения не обнаружена.
Операция формирования при Р≤Р1 и Р≥Р2 сигнала для привода хода, обеспечивающего ограничение активной мощности в соответствии с условием Р1≤Р≤Р2 путем снижения скорости передвижения экскаватора, в известных устройствах аналогичного назначения не обнаружена;
Операция отображения графика текущего значения мощности известна в информационно-диагностических системах экскаваторов (Малафеев С.И., Коняшин В.И. Организация мониторинга карьерных экскаваторов / Наукоемкие технологии разработки и использования минеральных ресурсов. Новокузнецк, 2017. №3. - С. 201-206). Отображение текущего значения мощности одновременно со значениями уставок Р1 и Р2 на мониторе машиниста в известных устройствах аналогичного назначения не обнаружено.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
При реализации предлагаемого технического решения обеспечивается повышение надежности работы электрооборудования путем организации контроля рекуперированной энергии. В процессе перегона экскаватора постоянно измеряется мощность на вводе машины и сравнивается с двумя уставками:  и Р2=kмРг, где Рд и ηм.д. Первая уставка P1 соответствует максимальной мощности, которая может быть обеспечена при торможении двигателем. Вторая уставка Р2 соответствует максимальной мощности, которую может обеспечить дизель-генераторная станция. Диапазон мощности 0≤Р≤Р2 соответствует нормальному режиму работы дизель-генераторной станции. Диапазон мощности Р1≤Р≤0 соответствует допустимому режиму работы при рекуперации энергии. В случае превышения активной мощностью значения Р2 или превышения активной мощностью при рекуперации энергии значения Р1 происходит коррекция задания скорости для привода хода таким образом, что активная мощность ограничивается в пределах Р1≤Р≤Р2.
и Р2=kмРг, где Рд и ηм.д. Первая уставка P1 соответствует максимальной мощности, которая может быть обеспечена при торможении двигателем. Вторая уставка Р2 соответствует максимальной мощности, которую может обеспечить дизель-генераторная станция. Диапазон мощности 0≤Р≤Р2 соответствует нормальному режиму работы дизель-генераторной станции. Диапазон мощности Р1≤Р≤0 соответствует допустимому режиму работы при рекуперации энергии. В случае превышения активной мощностью значения Р2 или превышения активной мощностью при рекуперации энергии значения Р1 происходит коррекция задания скорости для привода хода таким образом, что активная мощность ограничивается в пределах Р1≤Р≤Р2.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
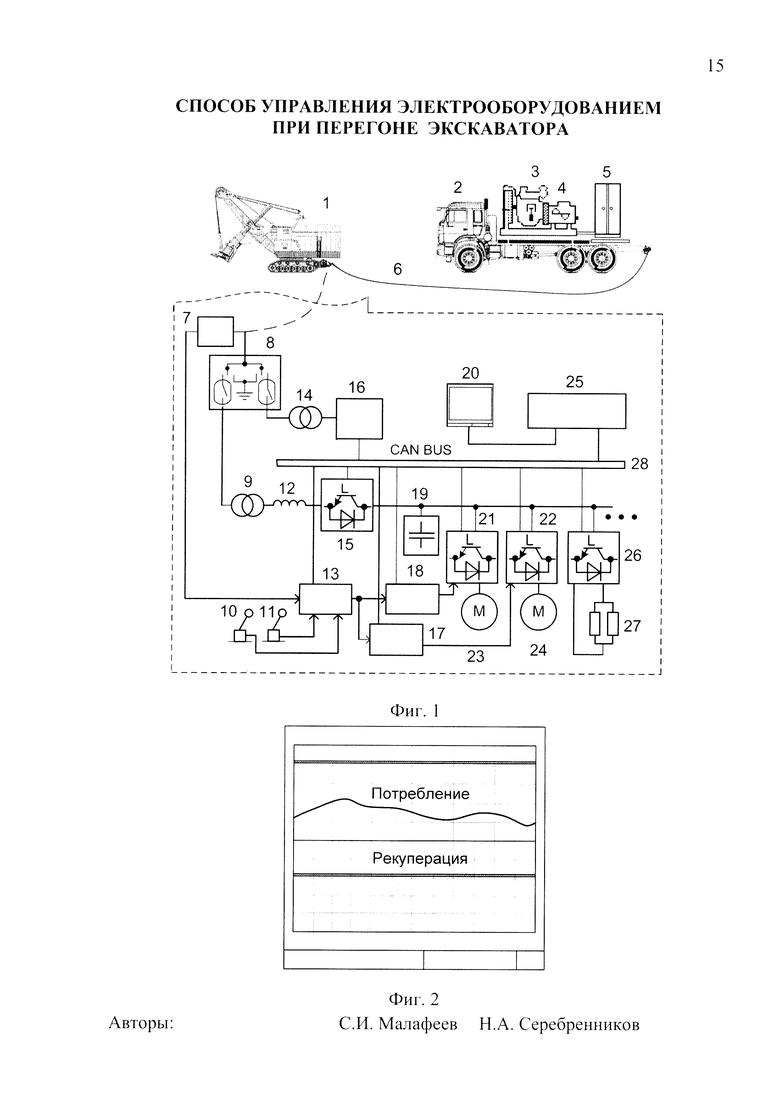
Сущность предполагаемого изобретения поясняется чертежами. На фиг. 1 показана упрощенная схема работы электрооборудования при перегонке экскаватора. На схеме обозначено: 1 - экскаватор; 2 - автомобиль с установленной на нем дизель-генераторной станцией; 3 - дизельный двигатель; 4 - синхронный генератор; 5 - электрическое распределительное устройство; 6 - электрический кабель; 7 - датчик активной мощности; 8 - вводное устройство экскаватора; 9 и 14 - первый и второй понижающие трансформаторы; 10 и 11 - командоаппараты управления приводами левой и правой гусениц; 12 - реактор; 13 - контроллер; 15 - активный выпрямитель; 16 - вспомогательное оборудование экскаватора; 17 и 18 - блоки управления инверторами; 19 - емкостной накопитель звена постоянного тока; 20 -монитор машиниста; 21 и 22 - инверторы привода хода; 23 и 24 - двигатели привода хода; 25 - контроллер состояния оборудования; 26 - транзисторный преобразователь аварийного сброса энергии; 27 - блок резисторов; 28 - шина CAN. Электроприводы главного движения (подъем, напор, поворот, открывание днища ковша) и другое электрооборудование экскаватора для упрощения чертежа не показаны.
На фиг. 2 показана диаграмма активной мощности, отображаемая на экране монитора машиниста.
Управление электрооборудованием при перегоне экскаватора происходит следующим образом. Автономная дизель-генераторная станция, размещенная на автомобиле 2, обеспечивает электроэнергией перегоняемый своим ходом экскаватор 1. Дизель-генераторная станция содержит дизельный двигатель 3, генератор переменного тока 4 и высоковольтную ячейку 5 с элементами контроля и защиты. Экскаватор 1 подключается к автономной дизель-генераторной станции с помощью штатного высоковольтного кабеля 6. Напряжение локальной сети поступает на вводную высоковольтную ячейку 8. Датчик активной мощности 7, установленный на электрическом вводе экскаватора 1, формирует сигнал, пропорциональный активной мощности потребляемой или рекуперируемой энергии. Понижающий трансформатор 9 обеспечивает электропитание локальной электрической сети постоянного тока. Выходное переменное напряжение трансформатора 9 через дроссель 12 преобразуется активным выпрямителем 15 в стабилизированное напряжение звена постоянного тока с емкостным накопителем 19. Инверторы 21 и 22 обеспечивают регулирование скорости двигателей хода 23 и 24 (правой и левой гусениц). Сигналы управления инверторами формируются блоками управления соответственно 18 и 17. Преобразователь 26 служит для аварийного сброса энергии и преобразования ее в теплоту с помощью блока резисторов 27.
Второй понижающий трансформатор 14 предназначен для электропитания вспомогательного электрооборудования экскаватора 16 (системы вентиляции, обогрева, освещения, маслонасосы и др.).
Сеть CAN 28 предназначена для обмена данными между компонентами системы. Контроллер состояния оборудования 25 осуществляет сбор и обработку данных о состоянии всех компонентов для формирования команд управления и передачи данных в информационно-диагностическую систему экскаватора. Монитор 20 расположен в кабине машиниста и предназначен для отображения процессов и состояния электрооборудования.
При перегоне экскаватора 1 включается режим «Ход». При этом управление приводами хода осуществляется машинистом с помощью командоаппаратов 10 и 11. Выходные сигналы командоаппаратов 10 и 11 и датчика активной мощности 7 поступают на входы контроллера 13, который подключен также к локальной сети CAN 28. Выходной сигнал контроллера в виде последовательного цифрового кода с идентификационными номерами приемников передается на входы блоков управления 17 и 18.
Сигналы задания скорости для привода хода формируются в зависимости от положения командоаппаратов 10 и 11 с коррекцией по активной мощности на вводе экскаватора. Мощность на вводе экскаватора зависит от скорости движения, уклона дороги, коэффициента трения дорожного полотна и режима движения. При движении по ровной дороге или при движении на подъем происходит потребление энергии от дизель-генераторной станции. Мощность станции ограничена номинальным значением мощности дизельного двигателя. Поэтому активная мощность, потребляемая экскаватором, не должна превышать значения Р2=kмРд.
При движении экскаватора под уклон или при торможении возможно механоэлектрическое преобразование энергии двигателями хода. Генерируемая при этом электрическая энергия через активный выпрямитель 15, дроссель 12 и понижающий трансформатор 9 поступает в локальную сеть переменного тока. Приемниками этой энергии служат понижающий трансформатор 14 с подключенным к нему вспомогательным электрооборудованием 16 экскаватора 1 и синхронный генератор 4. Генератор 4 переходит в режим двигателя и вращает коленчатый вал дизельного двигателя 3. В результате имеет место режим «торможения двигателем». Энергетические возможности такого торможения определяются механическим КПД дизельного двигателя ηм.д, который составляет 88…91% (Дизели. Справочник. Под ред. В.А. Ваншейдта, Н.Н. Иванченко, Л.К. Коллерова. - Л., Машиностроение, 1977, с. 54). Следовательно, максимальная мощность электромеханического преобразования энергии дизель-генераторной станцией с учетом КПД синхронного генератора ηс.г равна 
Вся рекуперированная электрическая энергия должна быть преобразована в другие виды энергии, главным образом, в механическую и тепловую. При этом мощность преобразования электрической энергии в механическую энергию непосредственно автономной станцией не должна превышать значения Р1.
Таким образом, при перегоне экскаватора активная мощность на вводе не должна превышать по модулю значения  при рекуперации и значения Р2=kмРд при потреблении. Это условие обеспечивается регулированием скорости передвижения экскаватора путем коррекции сигнала задания контроллером 13. Сигналы задания для привода хода левой и правой гусениц формируются следующим образом:
при рекуперации и значения Р2=kмРд при потреблении. Это условие обеспечивается регулированием скорости передвижения экскаватора путем коррекции сигнала задания контроллером 13. Сигналы задания для привода хода левой и правой гусениц формируются следующим образом:
 ;
;
 ,
,
где kа - коэффициент пропорциональности.
В процессе перегона экскаватора постоянно измеряется мощность на вводе машины и сравнивается с двумя уставками:  и Р2=kмРд. Первая уставка Р1 соответствует максимальной мощности, которая может быть обеспечена при торможении двигателем. Вторая уставка Р2 соответствует максимальной мощности, которую может обеспечить дизель-генераторная станция. Диапазон мощности 0≤Р≤Р2 соответствует нормальному режиму работы дизель-генераторной станции. Диапазон мощности Р1≤Р≤0 соответствует допустимому режиму работы при рекуперации энергии. В случае превышения активной мощностью значения Р2 или превышения активной мощностью при рекуперации энергии значения Р1 происходит коррекция задания скорости для привода хода таким образом, что активная мощность ограничивается в пределах Р1≤Р≤Р2.
и Р2=kмРд. Первая уставка Р1 соответствует максимальной мощности, которая может быть обеспечена при торможении двигателем. Вторая уставка Р2 соответствует максимальной мощности, которую может обеспечить дизель-генераторная станция. Диапазон мощности 0≤Р≤Р2 соответствует нормальному режиму работы дизель-генераторной станции. Диапазон мощности Р1≤Р≤0 соответствует допустимому режиму работы при рекуперации энергии. В случае превышения активной мощностью значения Р2 или превышения активной мощностью при рекуперации энергии значения Р1 происходит коррекция задания скорости для привода хода таким образом, что активная мощность ограничивается в пределах Р1≤Р≤Р2.
График текущего значения мощности одновременно со значениями уставок Р1 и Р2 (фиг. 2) отображается на мониторе машиниста. Контроль активной мощности позволяет машинисту оптимизировать процесс перегона экскаватора.
В качестве примера рассмотрим процессы при перегоне экскаватора ЭКГ-10 массой m=0,41⋅106 кг. Сопротивление передвижению экскаватора определяется по формуле (Петерс Е.Р. Основы теории одноковшовых экскаваторов. - М., Государственное научно-техническое издательство машиностроительной литературы, 1955, с. 215 - 224)
F=Fl+F2+F3,
где F1=(0,05…0,07)mg - сопротивление гусеничного хода;
g - ускорение свободного падения;
F2 - сопротивление деформации грунта, F2 ≈ 0,1 mg;
F3 - mg sin α - сопротивление движению при подъеме или сила смещения при спуске; v
α - угол подъема (спуска) к горизонту.
Механическая мощность при движении с учетом F1=0,05 mg равна
Pм=(F1+F2+F3)ν=(0,15+sin α)mgν,
где ν - скорость движения.
При движении под уклон (α<0) возможна рекуперация энергии (при sin α<-0,15). В этом случае электрическая мощность на статорных обмотках двигателей приближенно равна
Рэ=(0,15+sin α)mgνηм.пηx,
где ηм.п и ηх - КПД механической передачи и двигателей хода.
Часть рекуперированной электрической энергии потребляется электрооборудованием собственных нужд экскаватора, а остальная энергия поступает в локальную электрическую сеть. Электрическая мощность на вводе экскаватора при этом равна

где ηэ.п - КПД полупроводникового преобразователя;
ηт - КПД трансформатора.
Подставив в уравнение (2) выражение (1) для предельной мощности при рекуперации, и решив его относительно скорости перемещения, получим выражение
 .
.
Для случая Рд=560 кВт; Рс.н=30 кВт; ηм.д=0,9; ηт=0,96; ηс.г=0,95; ηм.п=0,9; ηх=0,95; ηэ.п=0,96; sin α=-0,3, имеем ν1=0,67 км/ч.
Скорость ν1 - максимальная скорость движения под уклон 18°, при которой происходит полное преобразование рекуперированной энергии в компонентах экскаватора и перегонной станции. Номинальная скорость передвижения экскаватора 0,7 км/ч.
При движении на подъем с уклоном 18° с учетом потребления собственных нужд экскаватора максимальная скорость равна 0,7 км/ч.
Таким образом, предлагаемый способ обеспечивает повышение надежности работы электрооборудования при перегоне экскаватора путем контроля рекуперированной и потребляемой от автономной дизель-генераторной станции энергии.
Другим важным достоинством предлагаемого технического решения является включение главных приводов и вспомогательного оборудования при перегоне и возможность изменения положения стрелы и платформы, освещения, вентиляции и обогрева экскаватора, а также использования информационно-диагностической системы для контроля состояния оборудования и включения системы удаленного мониторинга экскаватора.
Следовательно, использование в известном способе управления электрооборудованием при перегоне экскаватора, при котором используют автономную дизель-генераторную станцию с выходным напряжением питания экскаватора, подключаемую к экскаватору с помощью гибкого кабеля, и регулируют напряжение на двигателях хода с помощью командоаппарата с пульта машиниста экскаватора, дополнительно операций измерения активной мощности Р на вводе экскаватора, сравнения измеренного значения с первой и второй уставками соответственно  и Р2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηс.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока, при Р≤Р1 и Р≥Р2 формирования сигнала для привода хода, обеспечивающего ограничение активной мощности в соответствии с условием Р1≤Р≤Р2 путем снижения скорости передвижения экскаватора, и отображения графика текущего значения мощности одновременно со значениями уставок Р1 и Р2 на мониторе машиниста, повышает надежность работы электрооборудования путем контроля рекуперированной и потребляемой энергии.
и Р2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηс.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока, при Р≤Р1 и Р≥Р2 формирования сигнала для привода хода, обеспечивающего ограничение активной мощности в соответствии с условием Р1≤Р≤Р2 путем снижения скорости передвижения экскаватора, и отображения графика текущего значения мощности одновременно со значениями уставок Р1 и Р2 на мониторе машиниста, повышает надежность работы электрооборудования путем контроля рекуперированной и потребляемой энергии.
Использование предлагаемого способа на горных предприятиях при перегонах экскаваторов будет способствовать повышению надежности и качества работы электрооборудования.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРИЧЕСКАЯ ДИЗЕЛЬ-ГЕНЕРАТОРНАЯ СТАНЦИЯ ДЛЯ ПЕРЕГОНА ГОРНЫХ МАШИН | 2022 |
|
RU2790609C1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ЭЛЕКТРООБОРУДОВАНИЯ ЭКСКАВАТОРА С ИСПОЛЬЗОВАНИЕМ РЕКУПЕРИРОВАННОЙ ЭНЕРГИИ | 2023 |
|
RU2819222C1 |
| СПОСОБ УПРАВЛЕНИЯ ГИБРИДНОЙ СИЛОВОЙ УСТАНОВКОЙ ЛОКОМОТИВА И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2534466C1 |
| СИСТЕМА И СПОСОБ ОБЕСПЕЧЕНИЯ ВСПОМОГАТЕЛЬНОЙ МОЩНОСТИ ПОСРЕДСТВОМ РЕГУЛИРОВАНИЯ РЕКУПЕРИРОВАННОЙ МОЩНОСТИ В ПОДВИЖНОМ КАРЬЕРНОМ ОБОРУДОВАНИИ | 2012 |
|
RU2603109C2 |
| Устройство пуска асинхронного двигателя от дизель-генераторной установки | 2023 |
|
RU2821417C1 |
| СПОСОБ ЗАЩИТЫ СУДОВОЙ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМЫ | 2018 |
|
RU2681522C1 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СИНХРОННЫМ ДИЗЕЛЬ-ГЕНЕРАТОРОМ | 2011 |
|
RU2488708C2 |
| СИЛОВАЯ УСТАНОВКА ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2007305C1 |
| ЛОКОМОТИВ | 2013 |
|
RU2529245C1 |
| СИСТЕМА ДЛЯ ПОДДЕРЖАНИЯ ГОТОВНОСТИ К ЗАПУСКУ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ ТЕПЛОВОЗА | 2013 |
|
RU2530965C1 |
Изобретение относится к электротехнике и предназначено для использования на горных предприятиях для повышения эффективности технологического процесса передвижения горных машин при использовании автономных дизель-генераторных станций. Техническим результатом является повышение надежности работы электрооборудования путем организации контроля рекуперированной энергии. В способе управления электрооборудованием при перегоне экскаватора постоянно измеряют мощность на вводе машины, которую сравнивают с двумя уставками:  и Р2=kмРг, где Рд и ηм.д. Первая уставка Р1 соответствует максимальной мощности, которая может быть обеспечена при торможении двигателем. Вторая уставка Р2 соответствует максимальной мощности, которую может обеспечить дизель-генераторная станция. Диапазон мощности 0≤Р≤Р2 соответствует нормальному режиму работы дизель-генераторной станции. Диапазон мощности Р1≤Р≤0 соответствует допустимому режиму работы при рекуперации энергии со стороны нагрузки. В случае превышения активной мощностью значения Р2 или превышения активной мощностью при рекуперации энергии значения Р1 происходит коррекция задания скорости для привода хода таким образом, что активная мощность на вводе экскаватора ограничивается в пределах Р1≤Р≤Р2. 2 ил.
и Р2=kмРг, где Рд и ηм.д. Первая уставка Р1 соответствует максимальной мощности, которая может быть обеспечена при торможении двигателем. Вторая уставка Р2 соответствует максимальной мощности, которую может обеспечить дизель-генераторная станция. Диапазон мощности 0≤Р≤Р2 соответствует нормальному режиму работы дизель-генераторной станции. Диапазон мощности Р1≤Р≤0 соответствует допустимому режиму работы при рекуперации энергии со стороны нагрузки. В случае превышения активной мощностью значения Р2 или превышения активной мощностью при рекуперации энергии значения Р1 происходит коррекция задания скорости для привода хода таким образом, что активная мощность на вводе экскаватора ограничивается в пределах Р1≤Р≤Р2. 2 ил.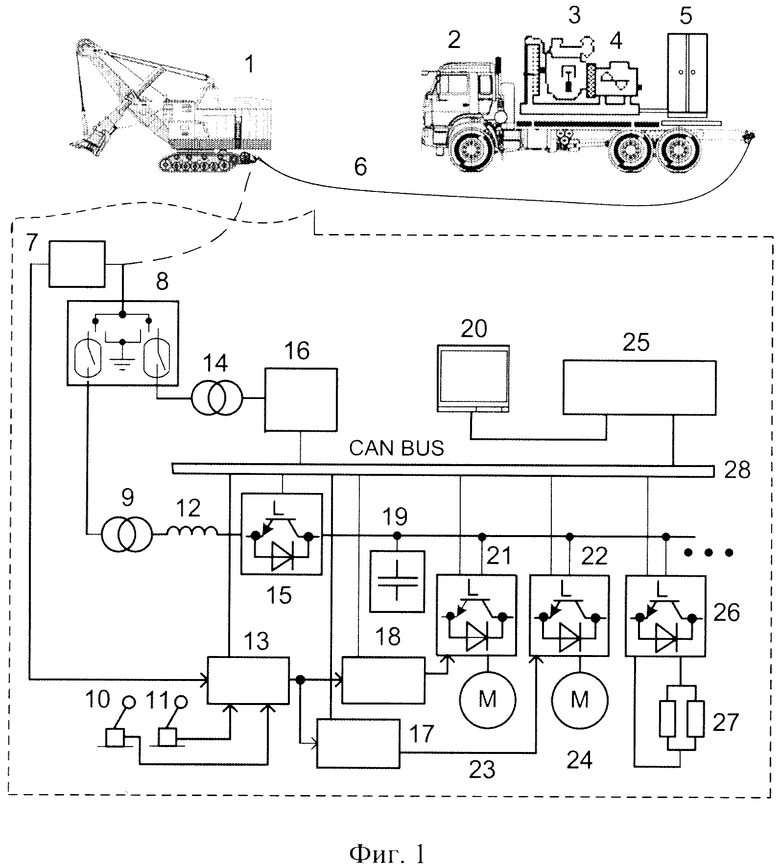
Способ управления электрооборудованием при перегоне экскаватора, при котором используют автономную дизель-генераторную станцию с выходным напряжением питания экскаватора, подключаемую к экскаватору с помощью гибкого кабеля, и регулируют напряжение на двигателях хода с помощью командоаппаратов с пульта машиниста экскаватора, отличающийся тем, что дополнительно измеряют активную мощность Р на вводе экскаватора, сравнивают измеренное значение с первой и второй уставками соответственно  и P2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηс.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока, при Р<Р1 и Р>Р2 формируют сигнал для привода хода, обеспечивающий ограничение активной мощности в соответствии с условием Р1≤Р≤Р2 путем снижения скорости передвижения экскаватора, и отображают график текущего значения мощности одновременно со значениями уставок Р1 и Р2 на мониторе машиниста.
и P2=kмРг, где Рд и ηм.д - номинальная мощность и механический КПД дизельного двигателя; Рг и ηс.г - номинальная мощность и КПД синхронного генератора; kм - коэффициент, учитывающий реактивную составляющую потребляемого тока, при Р<Р1 и Р>Р2 формируют сигнал для привода хода, обеспечивающий ограничение активной мощности в соответствии с условием Р1≤Р≤Р2 путем снижения скорости передвижения экскаватора, и отображают график текущего значения мощности одновременно со значениями уставок Р1 и Р2 на мониторе машиниста.
| УСТРОЙСТВО ЭЛЕКТРОПРИВОДА ПЕРЕГОННОЙ СТАНЦИИ | 2006 |
|
RU2330958C2 |
| Устройство для программного регулирования температуры, например, в красильных барках | 1960 |
|
SU133852A1 |
| Экскаватор | 1989 |
|
SU1684437A1 |
| JP 3782251 B2, 07.06.2006 | |||
| US 5361211 A1, 01.11.1994 | |||
| US 8174225 B2, 08.05.2012 | |||
| EP 1126085 A1, 22.08.2001 | |||
| WO2012115815 A1, 30.08.2012. | |||

