Изобретение относится к одноковшовым прицепным гидравлическим экскаваторам малых параметров, предназначенным для экскавации грунта в стесненных условиях и строительно-монтажных и вспомогательных работ в помещениях.
Цель изобретения - повышение эксплуатационных качеств путем смещения центра тяжести и повышения устойчивости в рабочем и транспортном положениях.
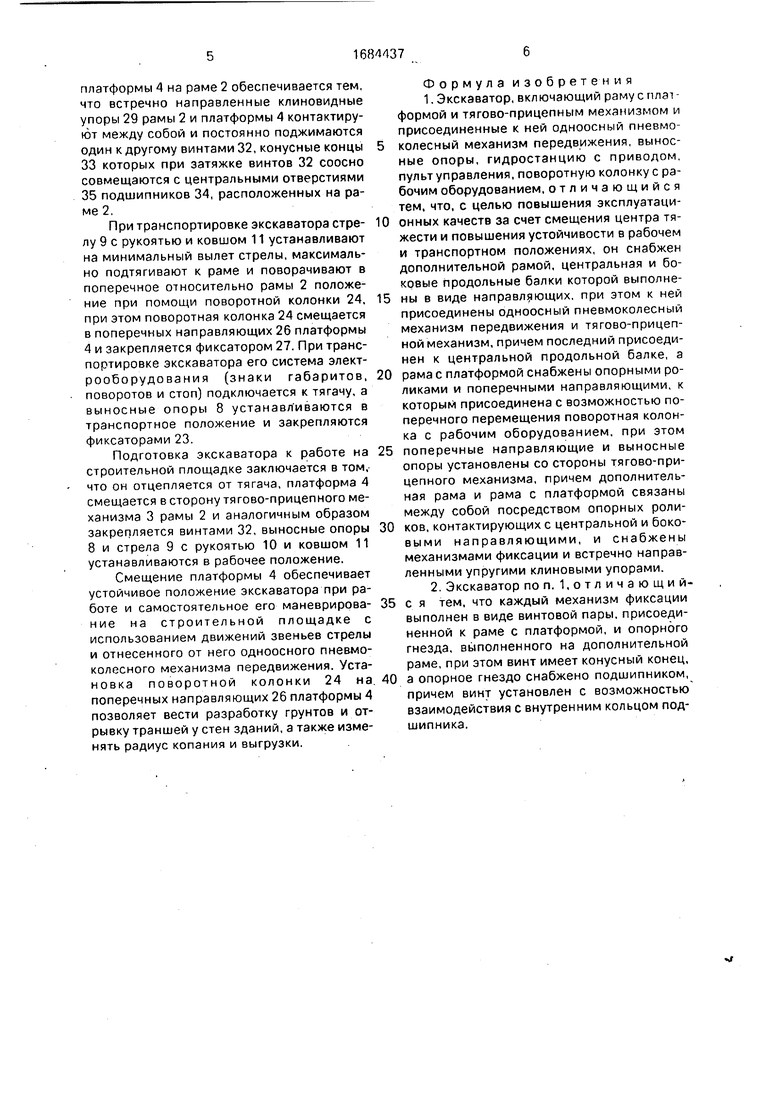
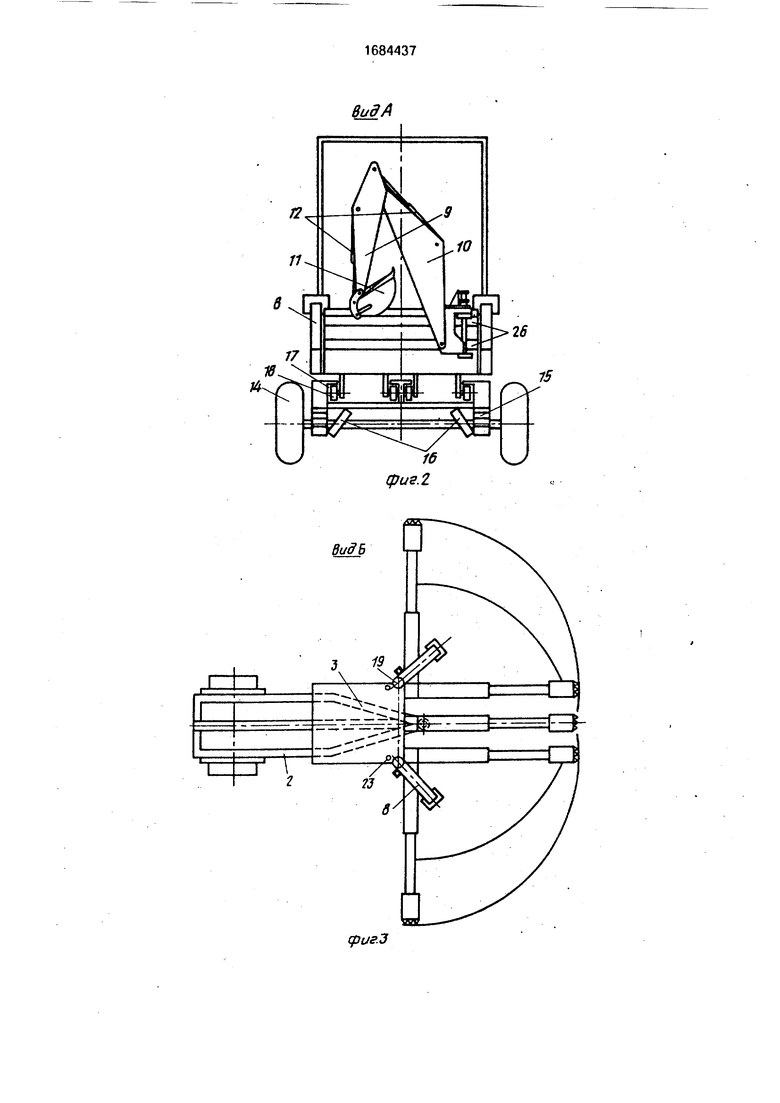
На фиг. 1 схематически показан экскаватор в транспортном положении, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - экскаватор в рабочем положении, общий вид; на фиг, 5 - узел I на фиг. 4.
Экскаватор состоит из механизма 1 передвижения, дополнительной рамы 2 с тяго- во-прицепным механизмом 3, рамы с платформой 4, гидравлической станции 5 с приводом б, пульта 7 управления, выносных опор 8, рабочего оборудования, состоящего из стрелы 9, рукоятки 10 и ковша 11, и гидроцилиндров 12.
Механизм 1 передвижения выполнен одноосным, пневмоколесным и состоит из оси 13, двух колес 14, упругих элементов 15 и гидравлических возвратных амортизаторов 16.
Дополнительная рама 2 снабжена продольными параллельными балками, выполненными в виде направляющих 17, которые расположены по двум боковым сторонам рамы и по центру, при этом центральная направляющая соединена с тягово-прицеп- ным механизмом 3. Рама с платформой 4 снабжена катками 18, помещенными в направляющие 17 рамы 2. На платформе 4 установлены гидравлическая станция 5 с приводом 6 и пульт 7 управления экскаватором.
Выносные опоры 8 расположены в передней части платформы 4, обращенной в сторону тягово-прицепного механизма 3 и фиксируются в транспортном и рабочих положениях. Выносные опоры 8 состоят из шарниров 19, рычагов 20 с грунтозацепом 21, гидроцилиндра 22 и фиксатора 23.
Стрела 9 присоединена к поворотной колонке 24 с гидроцилиндрами 25. Поворотная колонка 24 установлена в поперечных направляющих 26 платформы 4 и снабжена фиксатором 27. К платформе 4 прикреплена дуга 28 безопасности.
На раме 2 и платформе 4 установлены
встречно направленные клиновидные упоры 29 и фиксаторы 30, предназначенные для надежного заклинивания платформы 4 на раме 2 в рабочем и транспортном положениях. Клиновидные упоры 29 могут быть
подпружинены или установлены на эластичных прокладках 31. Фиксаторы 30 выполнены из винта 32 с конусным концом 33 и соосно ему расположенного опорного гнезда в виде подшипника 34 с центральным
отверстием 35. Винты 32 с гайками устанавливаются на платформе 4, а подшипники 34 на раме 2. Экскаватор имеет систему электрооборудования, необходимую для буксируемых средств.
Экскаватор работает следующим образом.
Транспортировка экскаватора на строительную площадку осуществляется буксировкой за тягово-прицепной механизм 3 к
автомобилю, например, УАЗ-3151-01. При транспортировке экскаватора раму с платформой 4 закрепляют в крайнем заднем положении дополнительной рамы 2 над механизмом передвижения, что снижает до
минимума нагрузку на буксирное устройство автомобиля. Надежное закрепление
платформы 4 на раме 2 обеспечивается тем, что встречно направленные клиновидные упоры 29 рамы 2 и платформы 4 контактируют между собой и постоянно поджимаются один к другому винтами 32, конусные концы 33 которых при затяжке винтов 32 соосно совмещаются с центральными отверстиями 35 подшипников 34, расположенных на раме 2.
При транспортировке экскаватора стре- лу 9 с рукоятью и ковшом 11 устанавливают на минимальный вылет стрелы, максимально подтягивают к раме и поворачивают в поперечное относительно рамы 2 положение при помощи поворотной колонки 24, при этом поворотная колонка 24 смещается в поперечных направляющих 26 платформы 4 и закрепляется фиксатором 27. При транспортировке экскаватора его система электрооборудования (знаки габаритов, поворотов и стоп) подключается к тягачу, а выносные опоры 8 устанавливаются в транспортное положение и закрепляются фиксаторами 23.
Подготовка экскаватора к работе на строительной площадке заключается в том, что он отцепляется от тягача, платформа 4 смещается в сторону тягово-прицепного механизма 3 рамы 2 и аналогичным образом закрепляется винтами 32, выносные опоры 8 и стрела 9 с рукоятью 10 и ковшом 11 устанавливаются в рабочее положение.
Смещение платформы 4 обеспечивает устойчивое положение экскаватора при работе и самостоятельное его маневрирова- ние на строительной площадке с использованием движений звеньев стрелы и отнесенного от него одноосного пневмо- колесного механизма передвижения. Установка поворотной колонки 24 на поперечных направляющих 26 платформы 4 позволяет вести разработку грунтов и отрывку траншей у стен зданий, а также изменять радиус копания и выгрузки.
Формула изобретения
1.Экскаватор, включающий раму с плат - формой и тягово-прицепным механизмом и присоединенные к ней одноосный пневмо- колесный механизм передвижения, выносные опоры, гидростанцию с приводом, пульт управления, поворотную колонку с рабочим оборудованием, отличающийся тем, что, с целью повышения эксплуатационных качеств за счет смещения центра тяжести и повышения устойчивости в рабочем и транспортном положениях, он снабжен дополнительной рамой, центральная и боковые продольные балки которой выполнены в виде направляющих, при этом к ней присоединены одноосный пневмоколесный механизм передвижения и тягово-прицеп- ной механизм, причем последний присоединен к центральной продольной балке, а рама с платформой снабжены опорными роликами и поперечными направляющими, к которым присоединена с возможностью поперечного перемещения поворотная колонка с рабочим оборудованием, при этом поперечные направляющие и выносные опоры установлены со стороны тягово-прицепного механизма, причем дополнительная рама и рама с платформой связаны между собой посредством опорных роликов, контактирующих с центральной и боковыми направляющими, и снабжены механизмами фиксации и встречно направленными упругими клиновыми упорами.
2.Экскаватор по п. 1,отличающий- с я тем, что каждый механизм фиксации выполнен в виде винтовой пары, присоединенной к раме с платформой, и опорного гнезда, выполненного на дополнительной раме, при этом винт имеет конусный конец, а опорное гнездо снабжено подшипником, причем винт установлен с возможностью взаимодействия с внутренним кольцом подшипника.
видА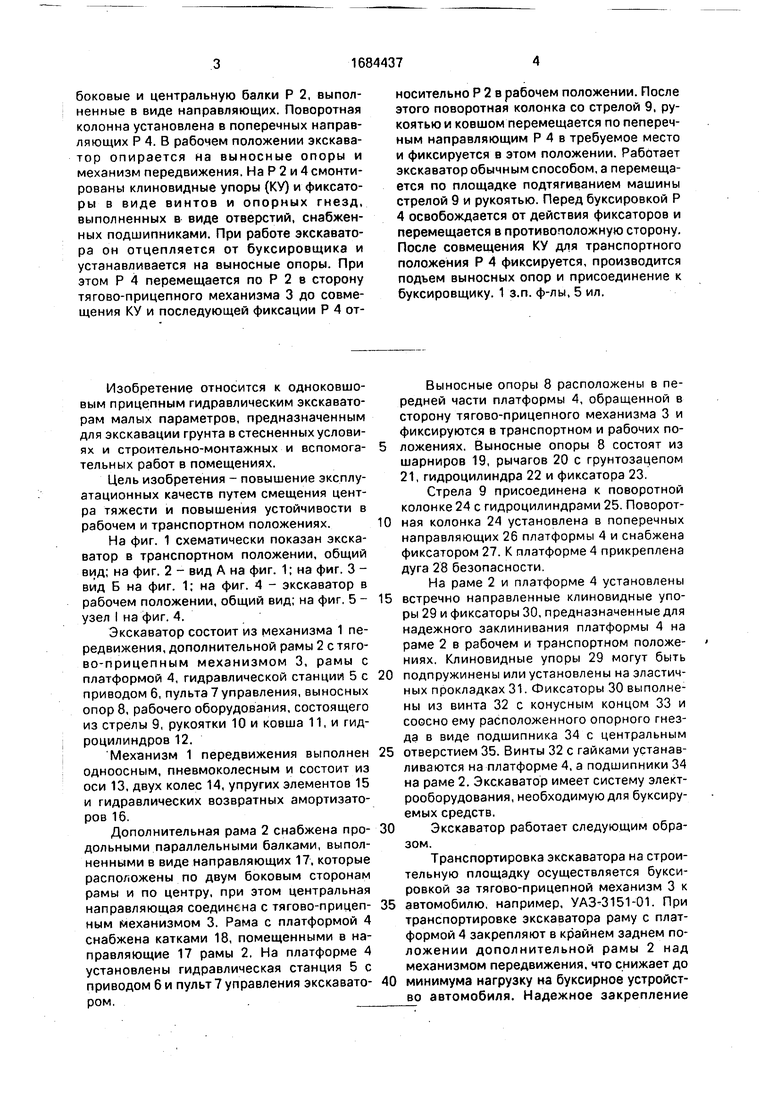
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство передвижения прицепного одноосного экскаватора | 1989 |
|
SU1714053A1 |
| Одноковшовый прицепной экскаватор | 1989 |
|
SU1712552A1 |
| Миниэкскаватор | 1989 |
|
SU1666662A1 |
| Малогабаритный экскаватор | 1989 |
|
SU1776731A1 |
| Экскаватор | 1986 |
|
SU1427042A1 |
| КОЛЕСНЫЙ ГИДРАВЛИЧЕСКИЙ ЭКСКАВАТОР | 2000 |
|
RU2185481C2 |
| Устройство для ремонта металлургических агрегатов | 1980 |
|
SU863647A1 |
| Одноковшовый гидравлический экскаватор с механизмом эвакуации грунта | 1990 |
|
SU1776721A1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР | 1994 |
|
RU2085662C1 |
| КРАН-МАНИПУЛЯТОР НА ГРУЗОВОМ АВТОМОБИЛЕ | 2013 |
|
RU2545698C1 |
Изобретение относится к одноковшовым прицепным гидравлическим экскаваторам малых параметров, предназначенным для экскавации грунта в стесненных условиях и строительно-монтажных и вспомогательных работ в помещениях. Цель - повышение эксплуатационных качеств за счет смещения центра тяжести и повышения устойчивости в рабочем и транспортном положениях. Экскаватор имеет дополнительную раму (Р) 2 с механизмом передвижения 1 и тягово-прицепным механизмом 3, а на основной Р 4 с платформой на поворотной колонке смонтированы стрела 9 с рукоятью и ковшом. Роликами Р 4 опирается на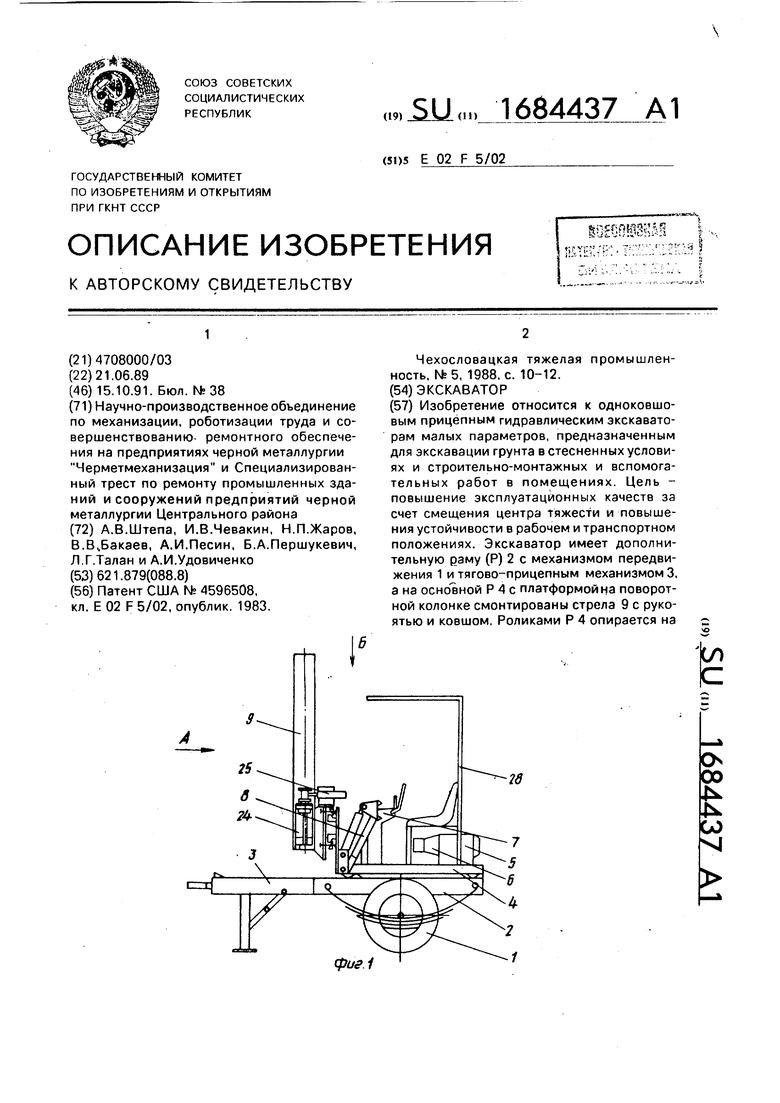
Я
Видь
I I I
фигЗ
29
J/
35
15
Редактор С.Лисина
- Фиг.5 Составитель В.Бритарев- Техред М.Моргентал
ts
Корректор. М.Шароши
| Патент США № 4596508, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Чехословацкая тяжелая промышленность, Nfe5, 1988 | |||
| с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
