Область техники, к которой относится изобретение
Изобретение относится к медицинской технике, в частности, к электрохирургическим аппаратам. Изобретение предназначено для коррекции выходной мощности электрохирургического аппарата в зависимости от скорости рассечения биологической ткани (биоткани) с целью снижения объема термически пораженной биоткани в процессе рассечения и коагуляции при проведении хирургических операций.
Уровень техники
В настоящее время в электрохирургических аппаратах широко используются системы обратной связи. Патент СА 2161421 от 22.01.2008 г. «Impedance feedback electrosurgical system» описывает систему обратной связи, основанную на измерении импеданса биоткани в процессе электрохирургического воздействия. Патент US 20150105768 А1 от 16.04.2015 г. «Electrosurgical systems and methods for monitoring power dosage» описывает электрохирургическую систему, изменяющую установленную выходную мощность в зависимости от измеренного значения средней мощности, воздействующей на биоткань. Указанные системы, как и настоящее изобретение, предназначены для коррекции выходной мощности электрохирургического аппарата в зависимости от измеряемых параметров, но не учитывают скорость перемещения активного электрода в операционном поле, что соответствует скорости рассечения биоткани в процессе электрохирургического воздействия. Так как в результате перемещения активного электрода электрохирургическое воздействие провоиздится на разных биотканях пациента, которые имеют различные свойства, в том числе различный импеданс, при этом снижается достоверность определения измеряемых параметров. Следовательно, поражения биоткани может быть в больших объемах.
Ближайшим аналогом является патент RU 2204353 С2 от 20.05.2003 г., «Электрохирургический аппарат», где описывается электрохирургический аппарат, позволяющий проводить рассечение и коагуляцию биотканей с минимизацией термических поражений благодаря введению в обратную связь значения скорости перемещения активного электрода, как и в настоящем изобретении. Скорость в данном аппарате вычисляется по изменению соотношений токов в цепях пассивных электродов, что является недостаточно достоверным, так как на результат измерения влияют: неоднородность распределения токов в теле пациента, нестабильность электрического контакта между активным электродом и биотканью, расположение и плотность прилегания пассивных электродов. Кроме того, требуется размещение трех пассивных электродов на теле пациента, что может усложнить проведение хирургической операции.
Раскрытие сущности изобретения
Изобретение представляет собой систему коррекции выходной мощности электрохирургического воздействия в зависимости от скорости перемещения наконечника активного электрода в операционном поле. Система является частью электрохирургического аппарата. Техническим результатом изобретения является система коррекции выходной мощности электрохирургического воздействия в зависимости от скорости перемещения активного электрода, находящегося в контакте с биотканью, позволяющая минимизировать термические поражения биоткани при ее использовании в составе электрохирургического аппарата при проведении хирургических операций. По сравнению с ближайшим аналогом, система не усложняет проведение хирургической операции, и эффективность ее работы не зависит от неоднородности биоткани и электрических контактов пассивных электродов с биотканью.
На электрододержателе располагается жестко закрепленный акселерометр-гироскоп, выполненный по технологии PEMS. В процессе электрохирургического воздействия измеряемые данные о проекциях ускорения на три геометрические осям и угловой скорости вращения вокруг осей передаются через кабель активного электрода. На основе этих данных вычисляется скорость перемещения активного электрода электрохирургического аппарата. Для коррекции выходной мощности электрохирургического воздействия используется сигнал обратной связи, по величине обратно пропорциональный рассчитанной скорости перемещения активного электрода.
Краткое описание чертежей
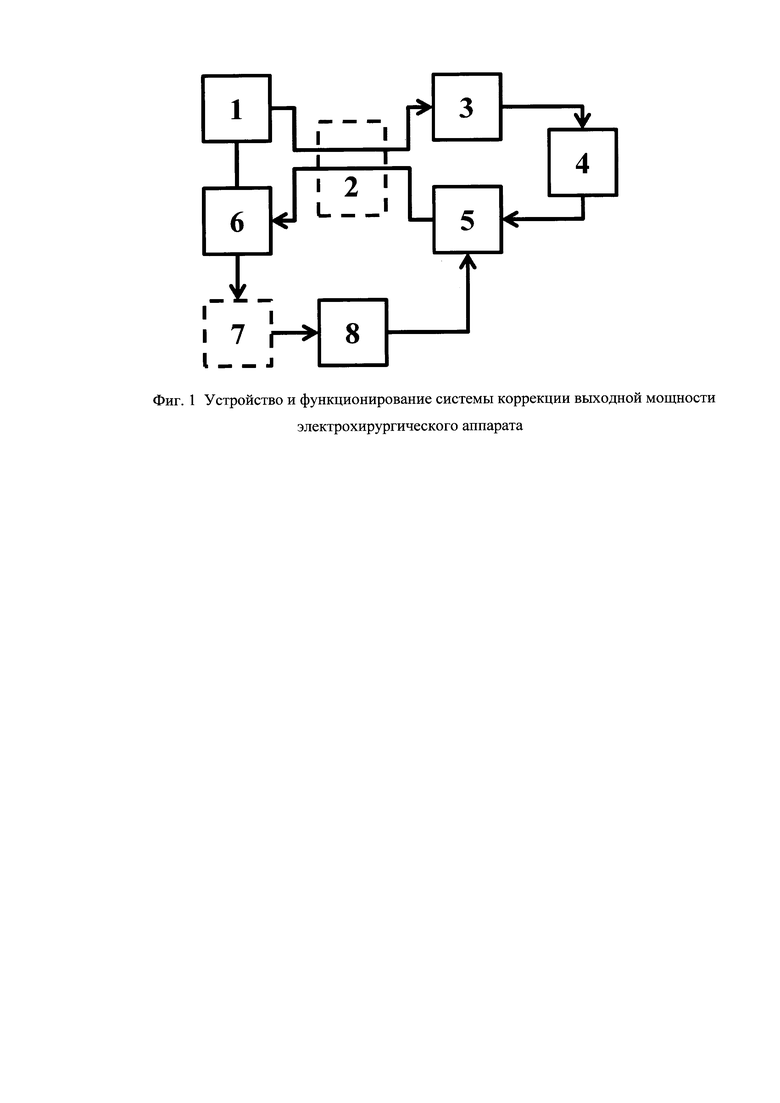
Фигура 1 - устройство и функционирование системы коррекции выходной мощности электрохирургического аппарата. 1 - первичный преобразователь, 2 - кабель активного электрода, 3 - блок обработки информации, 4 - цепь обратной связи, 5 - блок генерации высокочастотного напряжения, 6 - электрододержатель активного электрода, 7 - пациент, 8 - пассивный электрод.
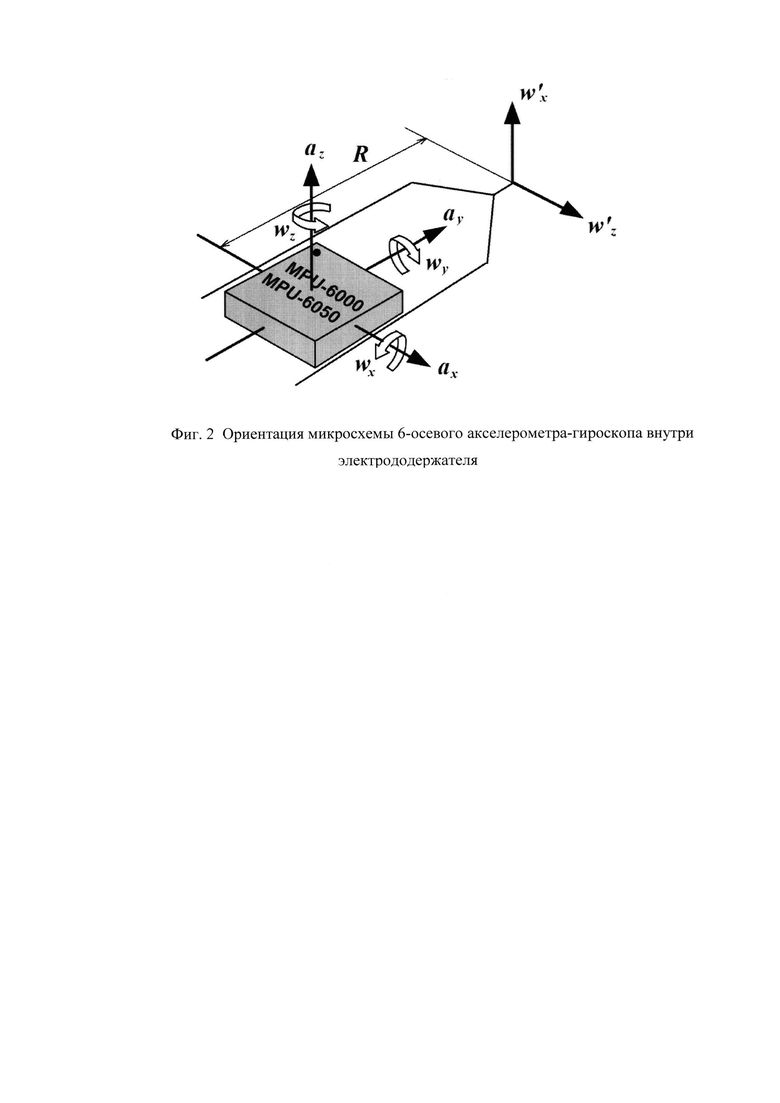
Фигура 2 - Ориентация микросхемы 6-осевого акселерометра-гироскопа внутри электрододержателя. ах, ау, az - положительные направления векторов ускорений по соответствующим осям, wz, wx - положительные направления вращения вокруг соответствующих осей, wz', wx' - положительные направления скоростей перемещения наконечника активного электрода в результате вращения электрододержателя.
Осуществление изобретения
Устройство и функционирование системы коррекции выходной мощности электрохирургического аппарата показано на фиг. 1. Цифрой 1 обозначен первичный преобразователь, представляющий собой миниатюрный акселерометр-гироскоп, выполненный по технологии PEMS, жестко закрепленный на электрододержателе (6) или внутри него. Это может быть 6-осевой PEMS акселерометр-гироскоп MPU-6050, или аналогичное ему по назначению устройство. Данные о проекциях ускорения на три геометрические оси и угловой скорости вращения вокруг осей, ориентация которых показана на фиг. 2, передаются в цифровом виде в блок обработки информации (3) через кабель активного электрода (2). PEMS акселерометр-гироскоп, а также провод, использующийся для передачи высокочастотного напряжения к электроду, должны быть экранированы.
В блоке обработки информации, который может быть совмещен с блоком управления электрохирургического аппарата, вычисляется скорость перемещения активного электрода при помощи программного алгоритма, реализующего формулу 1 для ориентации акселерометра-гироскопа согласно фиг. 2, при этом максимально близко к геометрической оси электродержателя.

Где ν - скорость перемещения наконечника электрода, t0 - время начала подачи высокочастотного напряжения на пациента, t - время окончания подачи высокочастотного напряжения, ах, ау, аz - значения ускорения в м/с, получаемые с модуля акселерометра и гироскопа, вдоль осей х, у и z соответственно, wz и wx - значения угловой скорости в °/c, получаемые с модуля акселерометра и гироскопа, вокруг осей z и x соответственно, R - расстояние от наконечника электрода до места расположения центра акселерометра-гироскопа в ручке держателя электрода, согласно фиг. 2.
Программа также может содержать алгоритмы фильтрации сигнала (например, фильтр Калмана), алгоритмы самокалибровки и вычисления поправок к измеряемым значениям ускорения и угловой скорости для повышения помехозащищенности и устранения эффекта накопления ошибки интегрирования. С блока обработки информации через цепь обратной связи (4) в блок генерации высокочастотного напряжения (5) подается сигнал обратной связи, величина которого обратно пропорциональна вычисленному значению скорости. Результирующий выходной сигнал используется для осуществления электрохирургического воздействия на пациента (7) при помощи активного электрода в электрододержателе (6) и пассивного электрода (8).
| название | год | авторы | номер документа |
|---|---|---|---|
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ | 2000 |
|
RU2161932C1 |
| ЭЛЕКТРИЧЕСКАЯ СИСТЕМА ДЛЯ ОНКОХИРУРГИИ | 2007 |
|
RU2354327C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ | 2003 |
|
RU2241407C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВЫХОДНОГО СИГНАЛА ДЛЯ ЭЛЕКТРОХИРУРГИЧЕСКОГО ВОЗДЕЙСТВИЯ НА БИОЛОГИЧЕСКИЕ ТКАНИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285490C2 |
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ | 2001 |
|
RU2204353C2 |
| ИМПЕДАНСНЫЙ ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ | 2001 |
|
RU2204351C2 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ВЫСОКОЧАСТОТНЫЙ | 2002 |
|
RU2221516C1 |
| АППАРАТ ДЛЯ ПЛАЗМЕННОГО ЭЛЕКТРОХИРУРГИЧЕСКОГО ВОЗДЕЙСТВИЯ | 2008 |
|
RU2389444C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ВЫСОКОЧАСТОТНЫЙ | 2000 |
|
RU2166299C1 |
| АППАРАТ ЭЛЕКТРОХИРУРГИЧЕСКИЙ ОСЦИЛЛЯЦИОННЫЙ | 2005 |
|
RU2294712C1 |
Изобретение относится к медицинской технике, а именно к электрохирургическим аппаратам. Система коррекции выходной мощности электрохирургического аппарата содержит электрохирургический инструмент, на котором или внутри которого жестко закреплен акселерометр-гироскоп, выполненный по технологии MEMS, ручной электрододержатель. Система коррекции осуществляет автоматическую коррекцию выходной мощности в процессе электрохирургического воздействия в зависимости от скорости перемещения активного электрода в руке хирурга, вычисляемой программным алгоритмом на основе данных, получаемых с акселерометра-гироскопа, что позволяет минимизировать термические поражения биоткани при проведении хирургических операций. 2 ил.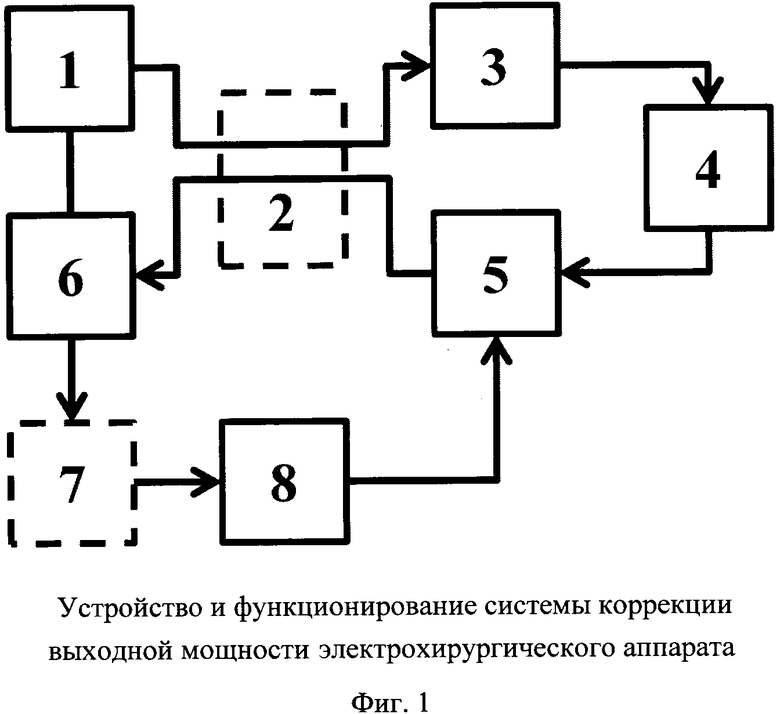
Система коррекции выходной мощности электрохирургического аппарата, содержащая электрохирургический инструмент, на котором или внутри которого жестко закреплен акселерометр-гироскоп, выполненный по технологии MEMS, отличающаяся тем, что имеет ручной электрододержатель и осуществляет автоматическую коррекцию выходной мощности в процессе электрохирургического воздействия в зависимости от скорости перемещения активного электрода в руке хирурга, вычисляемой программным алгоритмом на основе данных, получаемых с акселерометра-гироскопа.
| ЭЛЕКТРОХИРУРГИЧЕСКИЙ АППАРАТ | 2001 |
|
RU2204353C2 |
| US 2014336641 A1, 13.11.2014 | |||
| US 2015105768 A1, 16.04.2015. | |||

