Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству управления гибридного транспортного средства, которое управляет источником приведения в движение согласно режиму приведения в движение гибридного транспортного средства, имеющего источник приведения в движение, содержащий двигатель и мотор.
Уровень техники
[0002] Известно устройство управления гибридного транспортного средства, которое устанавливается на гибридном транспортном средстве, включающем в себя источник приведения в движение, имеющий двигатель и мотор, и навигационную систему, которая получает информацию окружения движения для запланированного маршрута движения, при этом устройство управления гибридного транспортного средства задает расписание операций нажатия педали акселератора при движении с низким расходом топлива на запланированном маршруте движения и отображает рекомендованную операцию нажатия педали акселератора на основе заданного расписания операций нажатия педали акселератора (например, см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Патент Японии номер 4905516
Сущность изобретения
Задача, решаемая изобретением
[0004] Тем не менее, обычное устройство управления гибридного транспортного средства только отображает рекомендованную операцию нажатия педали акселератора; ввиду этого, тогда как водитель может иметь сведения по рекомендованной операции нажатия педали акселератора, возникают случаи, в которых водитель не может выполнять рекомендованную операцию нажатия педали акселератора в зависимости от дорожных условий, погодных условий и т.д. Как результат, имеется проблема в том, что операция нажатия педали акселератора не выполняется в соответствии с расписанием операций нажатия педали акселератора, и в том, что не может выполняться предполагаемое управление источником приведения в движение.
[0005] С учетом проблемы, описанной выше, цель настоящего изобретения заключается в том, чтобы предоставлять устройство управления гибридного транспортного средства, которое позволяет управлять источником приведения в движение в соответствии с планом движения.
Средство достижения цели
[0006] Чтобы достигать цели, описанной выше, устройство управления гибридного транспортного средства настоящего изобретения устанавливается в гибридном транспортном средстве, имеющем источник приведения в движение, который включает в себя двигатель и мотор, и навигационную систему, которая получает информацию окружения движения по запланированному маршруту движения и содержит контроллер источника приведения в движение, который выполняет управление источником приведения в движение в соответствии с режимом приведения в движение гибридного транспортного средства.
Гибридное транспортное средство содержит, в качестве режимов приведения в движение, режим на основе плана движения, который управляет источником приведения в движение в соответствии с планом движения, который задается на основе информации окружения движения, полученной из навигационной системы, и экономичный режим, который управляет источником приведения в движение, который приоритезирует эффективность использования топлива выше мощностных рабочих характеристик.
Помимо этого, контроллер источника приведения в движение выполнен с возможностью связывать выбор режима на основе плана движения с операцией задания экономичного режима, причем режим на основе плана движения выбирается в состоянии, в котором экономичный режим не выбирается.
Преимущества изобретения
[0007] Здесь, даже если план движения задается на основе информации окружения движения, возникают случаи, в которых фактическое управление источником приведения в движение отличается от того, что предполагается, в зависимости от того, как водитель осуществляет вождение. Напротив, поскольку выбор режима на основе плана движения связывается с операцией задания экономичного режима в устройстве управления гибридного транспортного средства настоящего изобретения, если экономичный режим задается во время выбора режима на основе плана движения, можно подавлять запрашиваемую движущую силу, с тем чтобы уменьшать варьирование в стиле вождения водителя.
За счет этого можно подавлять неожиданный запуск двигателя, вызываемый посредством стиля вождения водителя, и управлять источником приведения в движение в соответствии с планом движения.
Краткое описание чертежей
[0008] Фиг. 1 является общим системным видом, иллюстрирующим гибридное транспортное средство, к которому применяется устройство управления по первому варианту осуществления.
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса задания режима приведения в движение, который выполняется посредством модуля управления транспортного средства по первому варианту осуществления.
Фиг. 3 является временной диаграммой, иллюстрирующей характеристики каждого из прогнозируемой скорости транспортного средства/запланированного режима движения/фактической скорости транспортного средства/фактического режима движения при задании "режима на основе плана движения" в устройстве управления по первому сравнительному примеру.
Фиг. 4 является временной диаграммой, иллюстрирующей характеристики каждого из прогнозируемой скорости транспортного средства/запланированного режима движения/фактической скорости транспортного средства/режима фактической скорости транспортного средства при задании "режима на основе плана движения" в устройстве управления по первому варианту осуществления.
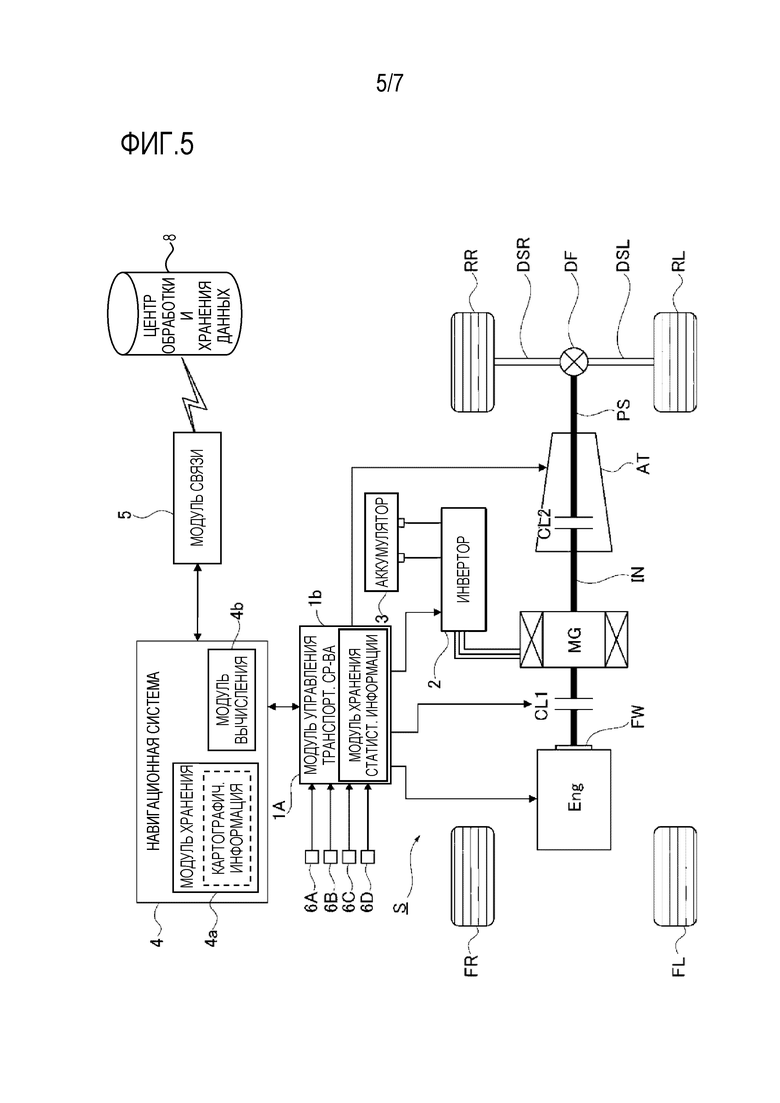
Фиг. 5 является общим системным видом, иллюстрирующим гибридное транспортное средство, к которому применяется устройство управления гибридного транспортного средства по второму варианту осуществления.
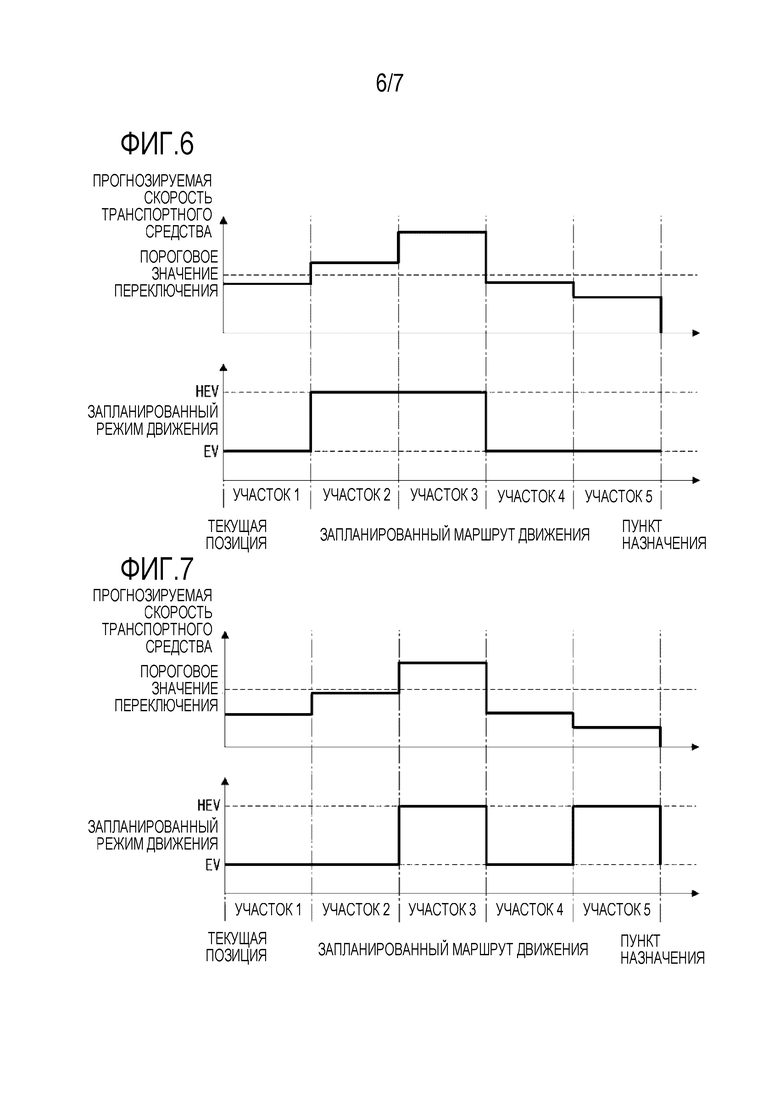
Фиг. 6 является временной диаграммой, иллюстрирующей характеристики каждого из прогнозируемой скорости транспортного средства/запланированного режима движения при задании "режима на основе плана движения" в устройстве управления по второму сравнительному примеру.
Фиг. 7 является временной диаграммой, иллюстрирующей характеристики каждого из прогнозируемой скорости транспортного средства/запланированного режима движения при задании "режима на основе плана движения" в устройстве управления по второму варианту осуществления.
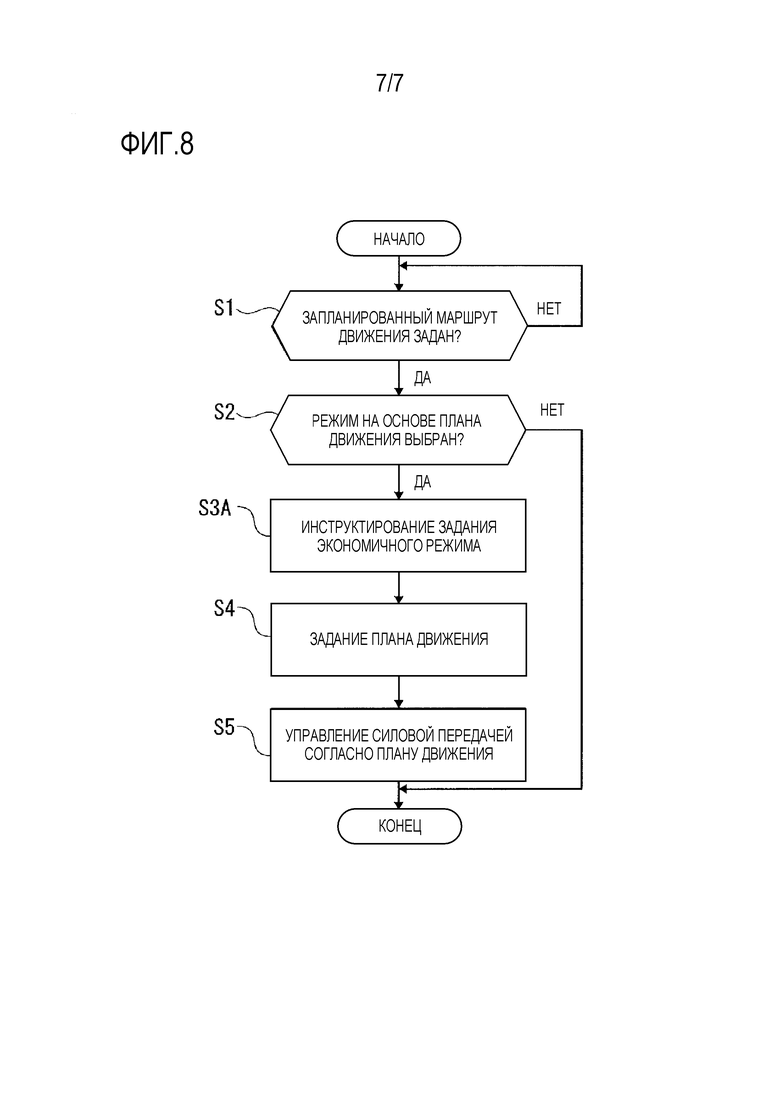
Фиг. 8 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса задания режима приведения в движение, который выполняется посредством модуля управления транспортного средства по другому примеру настоящего изобретения.
Подробное описание вариантов осуществления изобретения
[0009] Ниже поясняется вариант осуществления для реализации устройства управления гибридного транспортного средства настоящего изобретения на основе первого варианта осуществления и второго варианта осуществления, проиллюстрированных на чертежах.
[0010] Первый вариант осуществления
Во-первых, отдельно описываются "Общая конфигурация системы гибридного транспортного средства", "Конфигурация системы управления транспортного средства" и "Конфигурация процесса задания режима приведения в движение" относительно конфигурации устройства управления гибридного транспортного средства по первому варианту осуществления.
[0011] Общая конфигурация системы гибридного транспортного средства
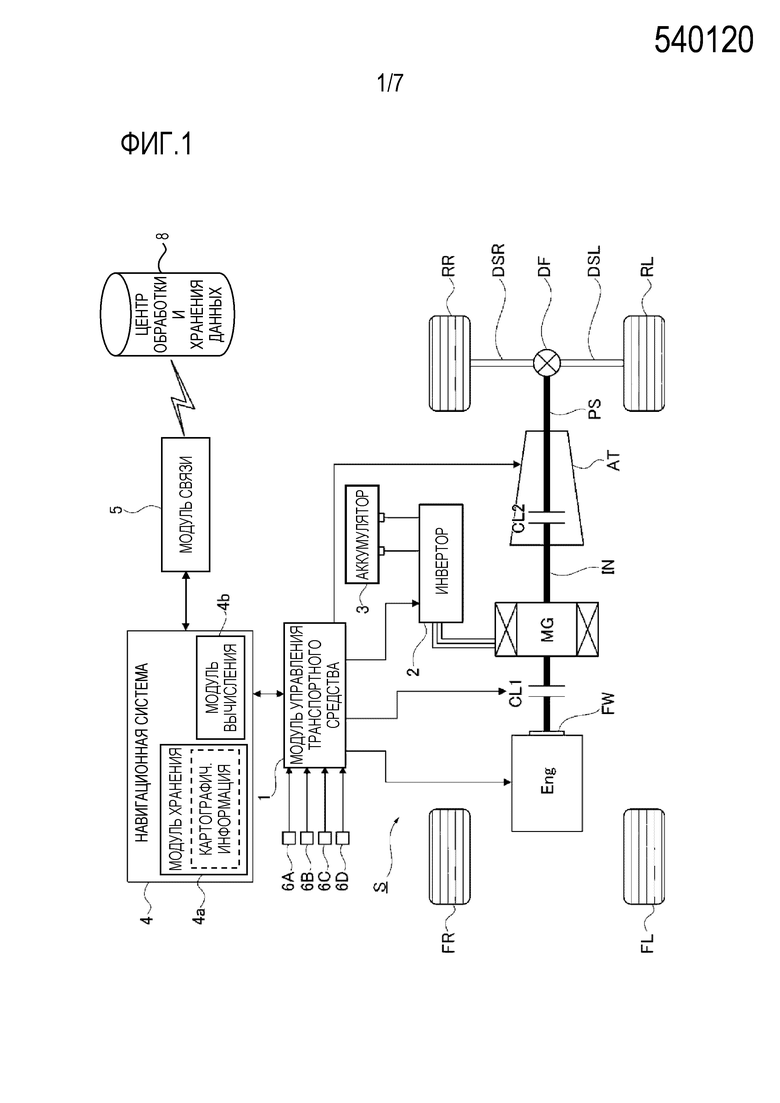
Фиг. 1 является общим системным видом, иллюстрирующим гибридное транспортное средство, к которому применяется устройство управления по первому варианту осуществления. Ниже описывается общая конфигурация системы гибридного транспортного средства по первому варианту осуществления на основе фиг. 1.
[0012] Гибридное транспортное средство S согласно первому варианту осуществления представляет собой гибридное транспортное средство FR-типа с приводом на задние колеса (один пример гибридного транспортного средства). Приводная система гибридного транспортного средства S содержит двигатель Eng, первую муфту CL1, мотор/генератор MG, вторую муфту CL2, автоматическую трансмиссию AT, входной трансмиссионный вал IN, карданный вал PS, дифференциал DF, левый ведущий вал DSL, правый ведущий вал DSR, левое заднее колесо RL (ведущее колесо) и правое заднее колесо RR (ведущее колесо), как проиллюстрировано на фиг. 1. FL представляет собой левое переднее колесо, а FR представляет собой правое переднее колесо.
[0013] Двигатель Eng представляет собой бензиновый двигатель или дизельный двигатель и источник приведения в движение гибридного транспортного средства S. В двигателе Eng, управление запуском двигателя, управление остановкой двигателя, управление открытием клапана для дроссельного клапана, управление отсечкой топлива и т.п. выполняется на основе команд управления двигателем из модуля 1 управления транспортного средства. Первая муфта CL1 соединяется с выходным валом двигателя через маховик FW.
[0014] Первая муфта CL1 представляет собой муфту, которая размещается между двигателем Eng и мотором/генератором MG, и в ней зацепление/зацепление в режиме проскальзывания/расцепление управляются посредством управляющего гидравлического давления первой муфты, сформированного посредством гидравлического узла, который не показан, на основе команды управления из модуля 1 управления транспортного средства. Один пример этой первой муфты CL1, которая должна использоваться, представляет собой нормально закрытую однодисковую сухую муфту, в которой этапы "полное зацепление → зацепление в режиме проскальзывания → полное расцепление" управляются посредством управления длиной хода, которое использует гидравлическое исполнительное устройство, имеющее поршень, и которое поддерживает полное зацепление посредством силы смещения диафрагменной пружины. Эта первая муфта CL1 выступает в качестве средства переключения режима, которое переключается между режимом электрического транспортного средства, имеющего только мотор/генератор MG в качестве источника приведения в движение для обеспечения движения, и режимом гибридного транспортного средства, имеющего как двигатель Eng, так и мотор/генератор MG в качестве источников приведения в движение для обеспечения движения.
[0015] Мотор/генератор MG представляет собой синхронный мотор/генератор, в котором постоянный магнит встраивается в ротор, и обмотка статора наматывается на статор, и который представляет собой источник приведения в движение гибридного транспортного средства S. Этот мотор/генератор MG управляется посредством приложения трехфазного переменного тока, который формируется посредством инвертора 2, на основе команды управления из модуля 1 управления транспортного средства. Мотор/генератор MG может работать в качестве электромотора, который вращательно приводится в действие посредством приема электрической мощности из аккумулятора 3, чтобы запускать двигатель Eng или приводить в движение левое и правое задние колеса RL и RR (это рабочее состояние в дальнейшем называется "подачей электрической мощности"), или может выступать в качестве электрогенератора, который формирует электродвижущую силу с обоих концов обмотки статора и заряжает аккумулятор 3, когда ротор принимает вращательную энергию из двигателя Eng или левого и правого задних колес RL и RR (это рабочее состояние в дальнейшем называется "рекуперацией"). Ротор мотора/генератора MG соединяется с входным передаточным валом IN автоматической трансмиссии AT.
[0016] Вторая муфта CL2 размещается между мотором/генератором MG и левым и правым задними колесами RL и RR, и в ней зацепление/зацепление в режиме проскальзывания/расцепление управляется посредством гидравлического давления управления второй муфтой, сформированного посредством гидравлического узла, который не показан, на основе команды управления из модуля 1 управления транспортного средства. Примеры второй муфты CL2, которая должна использоваться, включают в себя нормально открытую мокрую многодисковую муфту или мокрый многодисковый тормоз, который может непрерывно управлять объемом расхода масла и гидравлическим давлением с помощью пропорционального соленоида.
[0017] Автоматическая трансмиссия AT представляет собой ступенчатую трансмиссию, которая размещается между мотором/генератором MG и левым и правым задними колесами RL и RR, и в ней, например, ступени зубчатой передачи для семи передач переднего хода/одной передачи заднего хода автоматически переключаются в соответствии со скоростью транспортного средства, величиной открытия позиции педали акселератора и т.п. Карданный вал PS соединяется с выходным передаточным валом автоматической трансмиссии AT. Затем карданный вал PS соединяется с левым и правым задними колесами RL и RR через дифференциал DF, левый ведущий вал DSL и правый ведущий вал DSR. В первом варианте осуществления, из множества фрикционных зацепляющих элементов, которые зацепляются на каждой ступени зубчатой передачи автоматической трансмиссии AT, оптимальный фрикционный зацепляющий элемент (муфта или тормоз), который располагается в тракте передачи крутящего момента и который соответствует предварительно определенному условию, выбирается в качестве второй муфты CL2. Таким образом, вторая муфта CL2 не добавляется заново в качестве выделенной муфты, которая является независимой от автоматической трансмиссии AT.
[0018] Гибридное транспортное средство S содержит режим электротранспортного средства (в дальнейшем называемый "EV-режимом") и режим гибридного транспортного средства (в дальнейшем называемый "HEV-режимом"), в качестве режимов движения согласно различиям в режиме приведения в движение, т.е. различиям в источнике приведения в движение для обеспечения движения.
[0019] "EV-режим" представляет собой режим, в котором первая муфта CL1 высвобождается, и в котором движение выполняется посредством только движущей силы мотора/генератора MG с остановленным двигателем Eng. "EV-режим" содержит режим движения за счет мотора и рекуперативный режим движения. "EV-режим" выбирается, когда требуемый крутящий момент приведения в движение является низким, и когда оставшаяся величина заряда аккумулятора 3 (в дальнейшем называемая "SOC (сокращение для состояния заряда) аккумулятора") является безопасной.
[0020] "HEV-режим" представляет собой режим, в котором первая муфта CL1 зацепляется, и в котором движение выполняется посредством движущей силы и двигателя Eng и мотора/генератора MG. "HEV-режим" содержит режим движения с использованием усиления мотора, режим движения за счет выработки электроэнергии и режим движения за счет двигателя. "HEV-режим" выбирается, когда требуемый крутящий момент приведения в движение является высоким, или когда SOC аккумулятора является недостаточным.
[0021] Кроме того, гибридное транспортное средство S FR-типа содержит "нормальный режим" и "режим на основе плана движения" в качестве режимов приведения в движение согласно различиям в способе управления источником приведения в движение. Кроме того, "экономичный режим", "спортивный режим" и "нормальный режим" предоставляются в качестве режимов приведения в движение согласно различиям в способе управления источником приведения в движение в "нормальном режиме" и в "режиме на основе плана движения".
[0022] "Нормальный режим" представляет собой режим, в котором режим движения выбирается посредством выполнения поиска в карте задания предварительно установленных режимов движения (не показана) на основе запрашиваемой движущей силы водителя, и источник приведения в движение управляется согласно выбранному режиму движения в любой момент времени. Задание "нормального режима" выполняется автоматически, когда не задается "режим на основе плана движения".
[0023] "Режим на основе плана движения" представляет собой режим, в котором план движения (запланированный режим движения) задается для движения с низким расходом топлива на основе информации окружения движения по запланированному маршруту движения, который задается посредством навигационной системы 4, которая описывается ниже, и источник приведения в движение управляется согласно плану движения. Таким образом, в "режиме на основе плана движения", запланированный маршрут движения сначала разделяется на множество участков, и запрашиваемая движущая сила водителя предполагается для каждого участка на основе информации окружения движения. Затем режим движения на каждом участке задается согласно предполагаемой запрашиваемой движущей силе, чтобы конфигурировать план движения (запланированный режим движения). Затем источник приведения в движение, такой как двигатель Eng и мотор/генератор MG, управляется таким образом, что он находится при движении с низким расходом топлива в режиме движения, который задается посредством плана движения.
В "режиме на основе плана движения", когда запрашиваемая движущая сила, которая отличается от того, что предполагается, формируется вследствие способа, которым водитель осуществляет вождение, и отсутствуют другие варианты, помимо выбора режима движения, который отличается от плана движения, режиму движения, который выбирается на основе фактически сформированной запрашиваемой движущей силы водителя, отдается приоритет. Помимо этого, задание "режима на основе плана движения" выполняется посредством нажатия кнопки задания вручную водителем, что не показано.
[0024] "Экономичный режим" представляет собой режим, который приоритезирует эффективность использования топлива выше мощностных рабочих характеристик, и в котором источник приведения в движение управляется таким образом, чтобы подавлять уровень расхода топлива больше по сравнению со "спортивным режимом" и "нормальным режимом". Таким образом, целевая движущая сила задается равной меньшему значению, чем в "спортивном режиме" или "нормальном режиме", относительно идентичной рабочей величины нажатия педали акселератора. Задание "экономичного режима" выполняется посредством нажатия кнопки задания вручную водителем, что не показано, а также автоматически выполняется в сочетании с выбором "режима на основе плана движения", как описано ниже.
[0025] "Спортивный режим" представляет собой режим, который приоритезирует рабочие характеристики мощности выше эффективности использования топлива, в котором целевая движущая сила задается равной большему значению относительно идентичной рабочей величины нажатия педали акселератора по сравнению с "нормальным режимом", и в котором источник приведения в движение управляется таким образом, чтобы реализовывать целевую движущую силу, имеющую относительно большое значение. Задание "спортивного режима" выполняется посредством нажатия кнопки задания вручную водителем, что не показано.
[0026] "Нормальный режим" представляет собой режим, в котором предварительно определенная целевая движущая сила задается заранее относительно рабочей величины нажатия педали акселератора, и в котором источник приведения в движение управляется таким образом, чтобы реализовывать целевую движущую силу. Задание "нормального режима" выполняется автоматически, когда не задается "экономичный режим" или "спортивный режим".
[0027] Конфигурация системы управления транспортного средства
Система управления транспортного средства гибридного транспортного средства S FR-типа в первом варианте осуществления содержит модуль 1 управления транспортного средства, инвертор 2, аккумулятор 3, навигационную систему 4 и модуль 5 связи, как проиллюстрировано на фиг. 1.
[0028] Модуль 1 управления транспортного средства (контроллер источника приведения в движение) содержит микрокомпьютер, его периферийные части и различные исполнительные устройства и т.д., и информация скорости транспортного средства из датчика 6A скорости транспортного средства, информация величины открытия позиции педали акселератора из датчика 6B величины открытия позиции педали акселератора, информация SOC аккумулятора из модуля 6C мониторинга SOC, который постоянно отслеживает SOC аккумулятора, информация климата из датчика 6D состояния климата, который содержит термометр, гигрометр и т.д. и определяет состояние климата, к примеру, температуру, влажность, дождь, снег, ветер и т.д., и информация окружения движения по запланированному маршруту движения из навигационной системы 4, вводятся в него.
Модуль управления транспортного средства затем управляет частотой вращения и выходным крутящим моментом двигателя Eng, зацеплением/зацеплением в режиме проскальзывания/расцеплением первой муфты CL1 и второй муфты CL2, частотой вращения и выходным крутящим моментом мотора/генератора MG и ступенью переключения передач автоматической трансмиссии AT. Помимо этого, модуль 1 управления транспортного средства выполняет процесс задания режима приведения в движение, который описывается ниже. Кроме того, когда "режим на основе плана движения" выбирается в качестве режима приведения в движение, план движения по запланированному маршруту движения задается для движения с низким расходом топлива на основе информации окружения движения, которая вводится из навигационной системы 4, и источник приведения в движение, такой как двигатель Eng и мотор/генератор MG, управляется согласно этому плану движения.
[0029] Навигационная система 4 содержит модуль 4a хранения, модуль 4b вычисления и дисплей (не показан). Модуль 4a хранения сохраняет информацию дороги, такую как радиус кривизны дороги, градиенты, перекрестки, светофоры, железнодорожные переезды, пешеходные переходы, ограничения скорости и пункты взимания платы за проезд и т.д., и картографическую информацию, включающую в себя информацию атрибутов дороги (дороги для скоростного движения, автострады, общие дороги, жилые районы и т.д.). Модуль 4b вычисления принимает сигналы со спутников и определяет абсолютное местоположение гибридного транспортного средства S на земле. Затем выполняется обращение к карте, сохраненной в модуле 4a хранения, для того чтобы идентифицировать местоположение, в котором присутствует гибридное транспортное средство S (текущую позицию), и запланированный маршрут движения от этой текущей позиции до пункта назначения задается. Этот запланированный маршрут движения, а также информация дороги и информация атрибутов дороги (информация окружения движения) по маршруту вводятся в модуль 1 управления транспортного средства. Помимо этого, дисплей, который не показан, предоставляется внутри салона таким образом, что его может видеть водитель.
[0030] Модуль 5 связи соединяется с навигационной системой 4 и выполняет беспроводную связь (телематическую связь) с центром 8 обработки и хранения данных, имеющим информацию дорожного движения, статистику по данным дорожного движения, информацию пробок и т.д., через сеть связи, к примеру, беспроводную базовую станцию и Интернет, которые не показаны. Эта "связь" является двунаправленной, с помощью которой можно передавать информацию из навигационной системы 4 в центр 8 обработки и хранения данных через модуль 5 связи, и вводить информацию, принимаемую из центра 8 обработки и хранения данных через модуль 5 связи, в навигационную систему 4.
Различные устройства могут использоваться в качестве модуля 5 связи, включающие в себя сотовые телефоны, DSRC и беспроводную LAN.
[0031] Конфигурация процесса задания режима приведения в движение
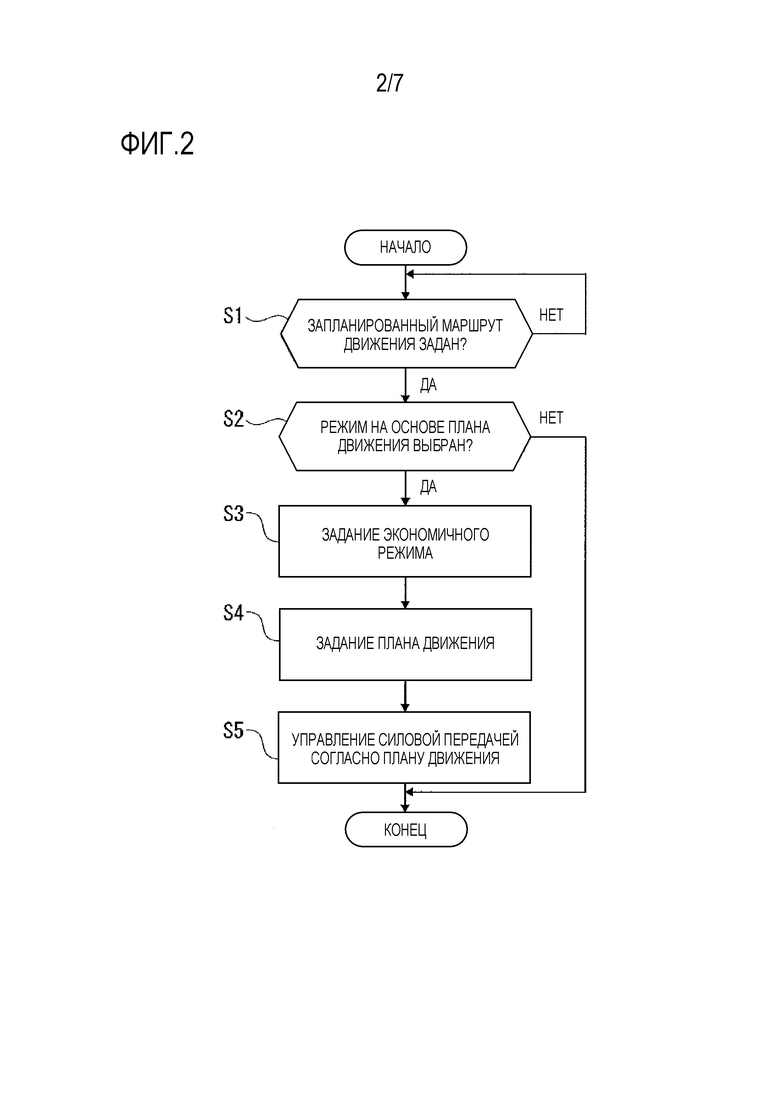
Фиг. 2 является блок-схемой последовательности операций способа, иллюстрирующей последовательность операций процесса задания режима приведения в движение, который выполняется посредством модуля управления транспортного средства по первому варианту осуществления. Ниже описывается каждый этап блок-схемы последовательности операций способа на фиг. 2, представляющей контент процесса задания режима приведения в движение.
[0032] На этапе S1 определяется то, вводит или нет водитель пункт назначения, и задан или нет запланированный маршрут движения от текущей позиции до пункта назначения посредством навигационной системы 4. Ввод пункта назначения включает в себя не только операцию водителя, но также и случаи, в которых пункт назначения прогнозируется посредством навигационной системы 4 из предыстории предыдущих поездок и т.п. Если "Да" (запланированный маршрут движения задан), процесс переходит к этапу S2. Если "Нет" (запланированный маршрут движения не задан), процесс повторяет этап S1.
[0033] На этапе S2 после определения того, что запланированный маршрут движения задан, на этапе S1, определяется то, выбирается или нет "режим на основе плана движения" в состоянии, в котором экономичный режим не выбирается. Если "Да" (экономичный режим="Деактивирован", режим на основе плана движения="Активирован"), процесс переходит к этапу S3. Если "Нет" (экономичный режим="Активирован" или режим на основе плана движения="Деактивирован"), процесс переходит к концу.
[0034] На этапе S3, после определения того, что экономичный режим="Деактивирован", и режим на основе плана движения="Активирован", на этапе S2, "экономичный режим" автоматически задается, и процесс переходит к этапу S4. Таким образом, когда "режим на основе плана движения" выбирается на этапе S2, выбор этого "режима на основе плана движения" связывается с операцией задания "экономичного режима". Здесь, поскольку "режим на основе плана движения" уже выбран на этапе S2, "экономичный режим" выбирается параллельно в качестве режима приведения в движение.
[0035] На этапе S4, после задания экономичного режима на этапе S3, план движения в запланированном режиме движения задается, и процесс переходит к этапу S5.
Здесь, задание плана движения предполагает запрашиваемую движущую силу водителя на основе информации окружения движения для каждого участка после разделения запланированного маршрута движения на множество участков.
Затем режим движения для каждого участка задается согласно предполагаемой запрашиваемой движущей силе. "Информация окружения движения", которая используется при задании плана движения, включает в себя информацию дороги и информацию атрибутов дороги из навигационной системы 4, информацию скорости транспортного средства из датчика 6A скорости транспортного средства, информацию величины открытия позиции педали акселератора из датчика 6B величины открытия позиции педали акселератора, информацию SOC аккумулятора из модуля 6C мониторинга SOC, информацию климата из датчика 6D состояния климата, а также окружающую информацию, полученную посредством камер и радаров, которые не показаны.
[0036] На этапе S5, после задания плана движения на этапе S4, управление силовой передачей, включающей в себя источник приведения в движение, содержащий двигатель Eng и мотор/генератор MG, выполняется согласно заданному плану движения, и процесс переходит к концу.
Здесь, поскольку "экономичный режим" задается, источник приведения в движение управляется таким образом, чтобы подавлять уровень расхода топлива больше по сравнению со "спортивным режимом" и "нормальным режимом". Таким образом, относительно небольшая целевая движущая сила задается относительно рабочей величины нажатия педали акселератора водителем и, например, скорость транспортного средства подавляется.
[0037] Далее описываются операции.
Во-первых, описывается "Операция задания плана движения и ее проблемы в устройстве управления гибридного транспортного средства по первому сравнительному примеру", после чего выполняется описание операции задания плана движения устройства управления гибридного транспортного средства согласно первому варианту осуществления.
[0038] Операция задания плана движения и ее проблемы в устройстве управления гибридного транспортного средства по первому сравнительному примеру
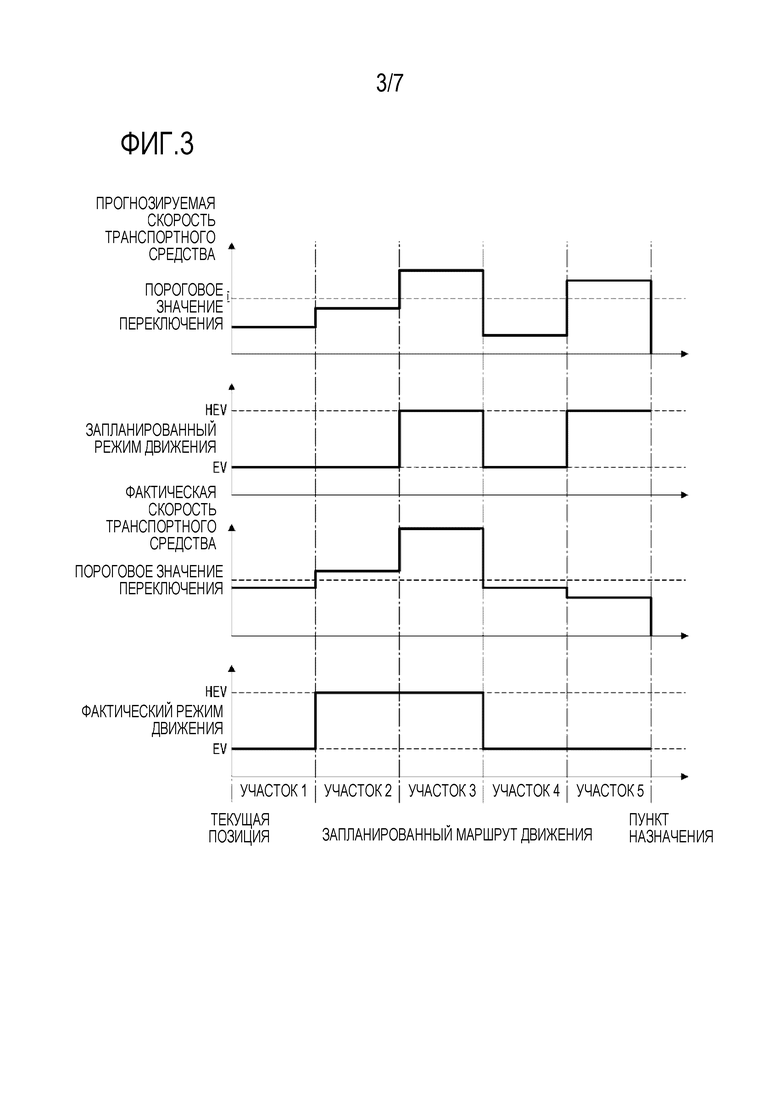
Фиг. 3 является временной диаграммой, иллюстрирующей характеристики каждого из прогнозируемой скорости транспортного средства/запланированного режима движения/фактической скорости транспортного средства/фактического режима движения при задании "режима на основе плана движения" в устройстве управления по первому сравнительному примеру. Ниже описывается операция задания плана движения и ее проблемы в устройстве управления гибридного транспортного средства по первому сравнительному примеру на основе фиг. 3.
[0039] В устройстве управления гибридного транспортного средства согласно первому сравнительному примеру, когда "режим на основе плана движения" выбирается в качестве режима приведения в движение, продолжается режим приведения в движение, который уже задан из числа "экономичного режима", "спортивного режима" и "нормального режима". Например, если "режим на основе плана движения" выбирается в состоянии, в котором "экономичный режим" не задается, и "нормальный режим" задается, план движения задается при продолжении "нормального режима", и источник приведения в движение управляется при продолжении "нормального режима" согласно заданному плану движения.
[0040] Таким образом, во-первых, запланированный маршрут движения разделяется на множество участков (здесь, участки 1-5), как проиллюстрировано на фиг. 3. Затем информация окружения движения получается для каждого участка, и прогнозируется скорость транспортного средства вычисляется на основе этой полученной информации окружения движения. Прогнозируемая скорость транспортного средства должна быть средней скоростью транспортного средства каждого участка.
[0041] Затем план движения (запланированный режим движения) задается на основе этой прогнозируемой скорости транспортного средства; здесь, запланированный режим движения задается как "EV-режим", если прогнозируется скорость транспортного средства меньше порогового значения переключения, которое задается заранее, и запланированный режим движения задается как "HEV-режим", если прогнозируется скорость транспортного средства превышает или равна пороговому значению переключения. Запланированный режим движения ввиду этого становится "EV-режимом" на участке 1, участке 2 и участке 4 и становится "HEV-режимом" на участке 3 и участке 5. Таким образом, можно достигать движения с низким расходом топлива посредством движения в "EV-режиме", имеющем только мотор/генератор MG в качестве источника приведения в движение для обеспечения движения, на участке 1, участке 2 и участке 4, и посредством движения в "HEV-режиме", имеющем двигатель Eng и мотор/генератор MG в качестве источников приведения в движение для обеспечения движения, на участке 3 и участке 5. Запланированный режим движения может определяться и задаваться на основе не только прогнозируемой скорости транспортного средства, но также и информации градиентов, прогнозируемого числа раз начала движения/остановки, прогнозируемого из пробок, и числа светофоров и прогнозируемой эффективности силовой передачи, такой как присутствие/отсутствие окружения для ускорения.
[0042] Напротив, скорость транспортного средства, когда водитель фактически движется, указывается посредством фактической скорости транспортного средства. Здесь, фактическая скорость транспортного средства превышает прогнозируемую скорость транспортного средства на участках 1 в 4, и фактическая скорость транспортного средства опускается ниже прогнозируемой скорости транспортного средства на участке 5. Поскольку "нормальный режим" задается в это время, источник приведения в движение управляется таким образом, чтобы реализовывать предварительно определенную целевую движущую силу, которая задается заранее относительно рабочей величины нажатия педали акселератора водителя. Другими словами, операция нажатия педали акселератора водителя непосредственно отражается на фактической скорости транспортного средства.
В этом "режиме на основе плана движения", режиму движения, который выбирается на основе запрашиваемой движущей силы водителя, которая фактически формируется, отдается приоритет по сравнению с режимом движения, который задается в плане движения. Соответственно, на участке 1, участке 4 и участке 5, в которых фактическая скорость транспортного средства опускается ниже порогового значения переключения, фактический режим движения задается как "EV-режим". С другой стороны, на участке 2 и участке 3, в которых фактическая скорость транспортного средства превышает пороговое значение переключения, фактический режим движения задается как "HEV-режим".
[0043] Как результат, на участке 2 и участке 5, источник приведения в движение управляется посредством режима движения, который отличается от плана движения (запланированного режима движения). Следовательно, возникает проблема в том, что движение с низким расходом топлива не может выполняться, и эффективность использования топлива ухудшается.
[0044] Операция задания плана движения
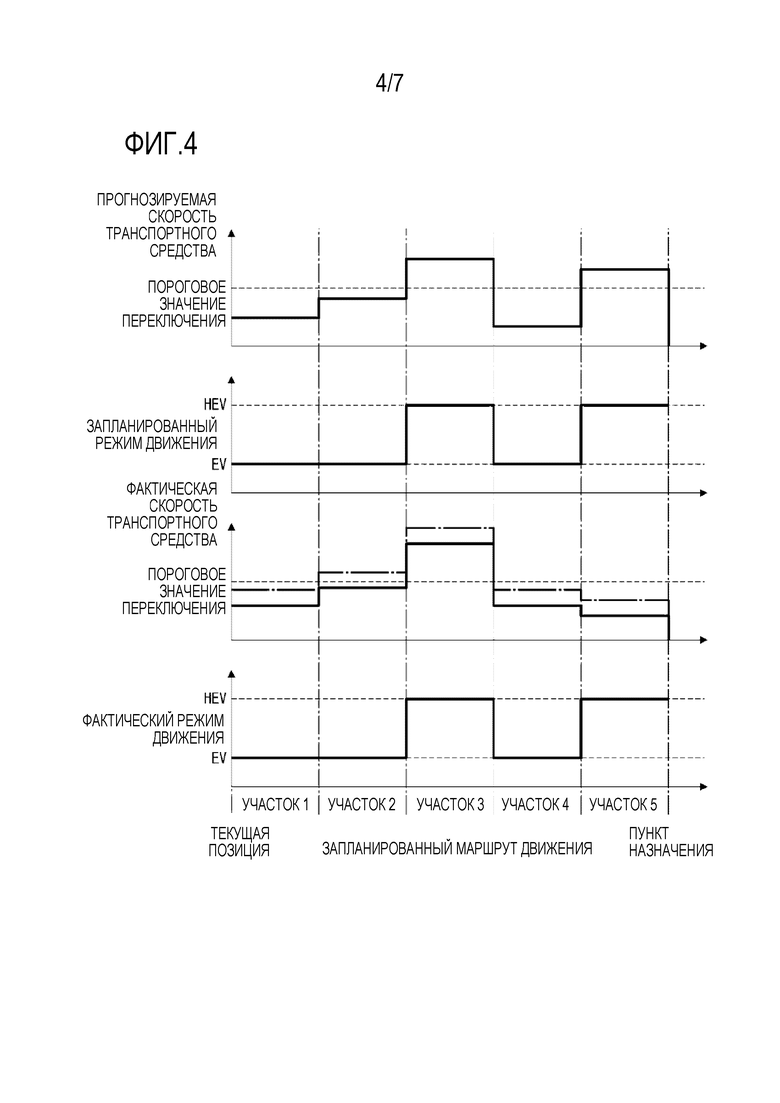
Фиг. 4 является временной диаграммой, иллюстрирующей характеристики каждого из прогнозируемой скорости транспортного средства/запланированного режима движения/фактической скорости транспортного средства/фактического режима движения при задании "режима на основе плана движения" в устройстве управления по первому варианту осуществления. Ниже описывается операция задания плана движения в устройстве управления по первому варианту осуществления на основе фиг. 4.
[0045] В устройстве управления гибридного транспортного средства согласно первому варианту осуществления, когда информация пункта назначения вводится в навигационную систему 4 посредством операции водителя, запланированный маршрут движения от текущей позиции до пункта назначения задается на основе картографической информации и т.д., которая сохраняется в навигационной системе 4. За счет этого определяется "Да" на этапе S1 на блок-схеме последовательности операций способа, проиллюстрированной на фиг. 2, и процесс переходит к этапу S2; затем, если "режим на основе плана движения" выбирается в качестве режима приведения в движение, процесс переходит от этапа S2 к этапу S3, и "экономичный режим" автоматически выбирается.
"Режим на основе плана движения" и "экономичный режим" ввиду этого должны задаваться параллельно в качестве режимов приведения в движение.
[0046] Если "экономичный режим" задается, процесс переходит к этапу S4, и план движения задается. Здесь, идентично устройству управления по первому сравнительному примеру, запланированный маршрут движения сначала разделяется на множество участков (здесь, участки 1-5). Затем информация окружения движения, к примеру, информация дороги и информация скорости транспортного средства, получается для каждого участка из навигационной системы 4 и различных датчиков, и прогнозируется скорость транспортного средства вычисляется на основе этой полученной информации окружения движения.
Предполагается, что уменьшение варьирования стиля вождения водителя является возможным посредством задания "экономичного режима" в это время, и становится легко прогнозировать точность информации окружения движения, такой как скорость транспортного средства, ускорение и замедление, потребление электроэнергии и расход топлива в запланированном режиме движения.
[0047] Затем план движения (запланированный режим движения) задается на основе прогнозируемой скорости транспортного средства. Здесь, запланированный режим движения задается как "EV-режим" на участке 1, участке 2 и участке 4, поскольку прогнозируется скорость транспортного средства меньше порогового значения переключения, и запланированный режим движения задается как "HEV-режим" на участке 3 и участке 5, поскольку прогнозируется скорость транспортного средства превышает или равна пороговому значению переключения.
[0048] За счет этого можно достигать движения с низким расходом топлива посредством движения в "EV-режиме" на участке 1, участке 2 и участке 4 и посредством движения в "HEV-режиме" на участке 3 и участке 5.
После этого, когда план движения задается, процесс переходит к этапу S5, и управление силовой передачей, включающей в себя источник приведения в движение, выполняется согласно плану движения.
[0049] Напротив, скорость транспортного средства, когда водитель фактически движется, указывается посредством фактической скорости транспортного средства. Здесь, в первом варианте осуществления, выбор этого "режима на основе плана движения", когда "режим на основе плана движения" выбирается, связывается с операцией задания "экономичного режима". Соответственно, даже если рабочая величина нажатия педали акселератора является идентичной, скорость транспортного средства уменьшается по сравнению с "нормальным режимом" посредством задания как "экономичного режима".
Таким образом, по сравнению с фактической скоростью транспортного средства в "нормальном режиме", указываемой посредством штрихпунктирной линии на фиг. 4 для сравнения, в первом варианте осуществления, фактическая скорость транспортного средства становится меньшим значением, даже если, например, рабочая величина нажатия педали акселератора является идентичной. Как результат, пороговое значение переключения, которое определяет режим движения, изменяется (повышается).
[0050] Соответственно, на участке 2, хотя режим движения, который отличается от плана движения, задастся в первом сравнительном примере, можно понижать фактическую скорость транспортного средства в первом варианте осуществления. Следовательно, можно задавать фактический режим движения как "EV-режим", который является идентичным запланированному режиму движения.
За счет этого можно подавлять неожиданный запуск двигателя, вызываемый посредством стиля вождения водителя, и управлять источником приведения в движение в соответствии с планом движения для достижения движения с низким расходом топлива.
[0051] Помимо этого, на участке 5, фактическая скорость транспортного средства понижается посредством задания "экономичного режима", и эта фактическая скорость транспортного средства опускается ниже порогового значения переключения. Тем не менее, посредством движения в "EV-режиме" на участке 2, можно потреблять SOC аккумулятора ожидаемым образом. Следовательно, можно задавать фактический режим движения как "HEV-режим", который является идентичным запланированному режиму движения. Таким образом, посредством выполнения управления источником приведения в движение в соответствии с планом движения до достигающего участка 5, можно управлять источником приведения в движение в соответствии с планом движения, при необходимости, независимо от фактической скорости транспортного средства.
В случае первого сравнительного примера, вследствие задания "HEV-режима" на участке 2, SOC аккумулятора становится более чрезмерным, чем предполагается при движении на участке 5. Следовательно, затруднительно задавать "HEV-режим" на участке 5. Таким образом, в устройстве управления по первому сравнительному примеру, при возникновении неожиданного запуска двигателя, становится невозможным выполнять управление источника приведения в движение в соответствии с планом движения на участке 5, вследствие эффектов SOC аккумулятора и т.д.
[0052] Таким образом, посредством связывания выбора "режима на основе плана движения" с операцией задания "экономичного режима", когда "режим на основе плана движения" выбирается в состоянии, в котором "экономичный режим" не выбирается в качестве режима приведения в движение, можно подавлять запрашиваемую движущую силу водителя, чтобы уменьшать варьирование в стиле вождения водителя. Соответственно, можно подавлять неожиданный запуск двигателя, вызываемый посредством стиля вождения водителя, и управлять источником приведения в движение в соответствии с планом движения. Затем посредством выполнения управления источником приведения в движение в соответствии с планом движения, движение с низким расходом топлива становится возможным, чтобы за счет этого повышать эффективность использования топлива.
[0053] Помимо этого, в первом варианте осуществления, когда выбор "режима на основе плана движения" связывается с операцией задания "экономичного режима", "экономичный режим" автоматически задается, когда выбирается "режим на основе плана движения".
Соответственно, операция задания "экономичного режима" вручную водителем является необязательной, и можно надежно задавать "экономичный режим" при выборе "режима на основе плана движения". Как результат, можно подавлять неожиданный запуск двигателя, вызываемый посредством стиля вождения водителя, и управлять источником приведения в движение в соответствии с планом движения.
[0054] Далее описываются преимущества.
Нижеперечисленные преимущества могут получаться за счет устройства управления гибридного транспортного средства согласно первому варианту осуществления.
[0055] (1) Устройство управления гибридного транспортного средства, установленное в гибридном транспортном средстве S, включающем в себя источник приведения в движение, имеющий двигатель Eng и мотор (мотор-генератор MG), и навигационную систему 4, которая получает информацию окружения движения для запланированного маршрута движения, содержащее контроллер источника приведения в движение (модуль 1 управления транспортного средства), который выполняет управление источником приведения в движение (двигателем Eng, мотором/генератором MG) в соответствии с режимом приведения в движение гибридного транспортного средства S, при этом гибридное транспортное средство S содержит, в качестве режимов приведения в движение, "режим на основе плана движения", который управляет источником приведения в движение (двигателем Eng, мотором/генератором MG) в соответствии с планом движения, который задается для движения с низким расходом топлива на основе информации окружения движения, полученной из навигационной системы 4, и "экономичный режим", который управляет источником приведения в движение (двигателем Eng, мотором/генератором MG), приоритезирующим эффективность использования топлива выше мощностных рабочих характеристик, причем контроллер источника приведения в движение (модуль 1 управления транспортного средства) имеет такую конфигурацию, в которой, при выборе "режима на основе плана движения" при отсутствии выбора "экономичного режима", выбор "режима на основе плана движения" связывается с операцией задания "экономичного режима".
За счет этого можно управлять источником приведения в движение в соответствии с планом движения, и движение с низким расходом топлива становится возможным, чтобы за счет этого повышать эффективность использования топлива.
[0056] (2) Контроллер источника приведения в движение (модуль 1 управления транспортного средства) имеет такую конфигурацию, в которой когда выбор "режима на основе плана движения" связывается с операцией задания "экономичного режима", "экономичный режим" автоматически задается, когда выбирается "режим на основе плана движения".
Соответственно, помимо преимущества (1), операция задания "экономичного режима" водителем становится необязательной, можно надежно задавать "экономичный режим" при выборе "режима на основе плана движения", чтобы управлять источником приведения в движение в соответствии с планом движения.
[0057] Пример 2
Второй вариант осуществления является примером, в котором план движения задается с учетом характеристик водителя, таких как операция нажатия педали акселератора и операция нажатия педали тормоза водителя.
[0058] Фиг. 5 является общим системным видом, иллюстрирующим гибридное транспортное средство, к которому применяется устройство управления гибридного транспортного средства по второму варианту осуществления. Ниже описывается устройство управления гибридного транспортного средства согласно второму варианту осуществления на основе фиг. 5. Конфигурациям, которые являются идентичными первому варианту осуществления, присваиваются ссылки с номерами, идентичные ссылкам с номерами первого варианта осуществления, и их подробные описания опускаются.
[0059] Модуль 1A управления транспортного средства по второму варианту осуществления содержит модуль 1b хранения статистической информации, как проиллюстрировано на фиг. 5.
Модуль 1b хранения статистической информации сохраняет предысторию характеристик водителя, такие как руление, операция нажатия педали акселератора и операция нажатия педали тормоза водителя.
[0060] Затем модуль 1A управления транспортного средства вычисляет характеристическую информацию водителя на основе предыстории характеристик водителя, которая вводится из модуля 1b хранения статистической информации, и включает характеристическую информацию водителя в информацию окружения движения при задании плана движения по запланированному маршруту движения посредством выбора "режима на основе плана движения". Таким образом, модуль управления транспортного средства задает план движения с учетом характеристик водителя.
[0061] Далее описываются операции второго варианта осуществления.
Во-первых, описывается "Операция задания плана движения и ее проблемы в устройстве управления гибридного транспортного средства по второму сравнительному примеру", после чего выполняется описание операции задания плана движения устройства управления гибридного транспортного средства согласно второму варианту осуществления.
[0062] Фиг. 6 является временной диаграммой, иллюстрирующей характеристики каждого из прогнозируемой скорости транспортного средства/запланированного режима движения при задании "режима на основе плана движения" в устройстве управления по второму сравнительному примеру. Ниже описывается операция задания плана движения и ее проблемы в устройстве управления гибридного транспортного средства по второму сравнительному примеру на основе фиг. 6.
[0063] В устройстве управления гибридного транспортного средства согласно второму сравнительному примеру, когда "режим на основе плана движения" выбирается в качестве режима приведения в движение, продолжается режим приведения в движение, который уже задан из числа "экономичного режима", "спортивного режима" и "нормального режима". Помимо этого, план движения задается с учетом характеристической информации водителя, которая вычисляется на основе предыстории характеристик водителя, которые сохраняются в модуле 1b хранения статистической информации.
[0064] Таким образом, запланированный маршрут движения разделяется на множество участков (здесь, участки 1-5), как проиллюстрировано на фиг. 6, и информация окружения движения получается для каждого участка, чтобы вычислять прогнозируемую скорость транспортного средства. Посредством включения характеристической информации водителя в информацию окружения движения, полученную в это время, можно учитывать характеристики водителя при вычислении прогнозируемой скорости транспортного средства. Запланированный маршрут движения, проиллюстрированный на фиг. 6, должен быть идентичным маршрутом в первом варианте осуществления, в качестве маршрута, по которому движение с низким расходом топлива является возможным посредством задания "EV-режима" на участке 1, участке 2 и участке 4 и задания "HEV-режима" на участке 3 и участке 5.
[0065] Относительно вышеприведенного, в результате учета характеристик водителя, прогнозируется скорость транспортного средства в устройстве управления по второму сравнительному примеру становится больше или равной пороговому значению переключения на участке 2 и участке 3 и опускается ниже порогового значения переключения на участке 1, участке 4 и участке 5, как проиллюстрировано на фиг. 6. Соответственно, запланированный режим движения (план движения) становится "EV-режимом" на участке 1, участке 4 и участке 5 и становится "HEV-режимом" на участке 2 и участке 3.
[0066] Здесь, чтобы реализовывать движение с низким расходом топлива, необходимо задавать "EV-режим" на участке 2 и задавать "HEV-режим" на участке 5, как описано выше. Тем не менее, чтобы учитывать характеристики водителя, с тем чтобы предотвращать неожиданный запуск двигателя посредством операции водителя и одновременно надлежащим образом реагировать на запрашиваемую движущую силу водителя, возникает такая проблема, что необходимо использовать план движения с относительно низкой эффективностью использования топлива.
[0067] Операция задания плана движения
Фиг. 7 является временной диаграммой, иллюстрирующей характеристики каждого из прогнозируемой скорости транспортного средства/запланированного режима движения при задании "режима на основе плана движения" в устройстве управления по второму варианту осуществления. Ниже описывается операция задания плана движения в устройстве управления по второму варианту осуществления на основе фиг. 7.
[0068] В устройстве управления гибридного транспортного средства по второму варианту осуществления, если запланированный маршрут движения задается, и "режим на основе плана движения" выбирается в качестве режима приведения в движение, "экономичный режим" автоматически задается. После этого, когда "экономичный режим" задается, план движения по запланированному маршруту движения задается на основе информации окружения движения.
В это время, план движения задается с учетом характеристик водителя посредством включения характеристической информации водителя в информацию окружения движения, идентично второму сравнительному примеру.
[0069] Здесь, во втором варианте осуществления, "экономичный режим" уже задан посредством выбора "режима на основе плана движения". Соответственно, можно понижать прогнозируемую скорость транспортного средства, которая используется при задании плана движения, по сравнению со случаем второго сравнительного примера, в котором "экономичный режим" не задается. Другими словами, можно изменять (повышать) пороговое значение переключения, которое определяет режим движения. Как результат, прогнозируется скорость транспортного средства опускается ниже порогового значения переключения на участке 1, участке 2, участке 4 и участке 5, и прогнозируется скорость транспортного средства становится больше или равной пороговому значению переключения на участке 3, как проиллюстрировано на фиг. 7.
[0070] За счет этого можно задавать запланированный режим движения как "EV-режим", который позволяет реализовывать движение с низким расходом топлива на участке 2. С другой стороны, относительно участка 5, посредством разрешения движения в "EV-режиме" на участке 2, можно переводить SOC аккумулятора в состояние достаточного потребления во время участка 5 движения и можно задавать запланированный режим движения как "HEV-режим", который позволяет реализовывать движение с низким расходом топлива. Как результат, можно корректировать план движения (план движения по второму сравнительному примеру), который задается с учетом характеристик водителя, и задавать план движения, с помощью которого может быть реализовано движение с низким расходом топлива, за счет этого повышая эффективность использования топлива.
[0071] Таким образом, во втором варианте осуществления, можно повышать точность плана движения и подавлять неожиданный запуск двигателя посредством стиля вождения водителя при одновременной возможности задавать план движения, который предполагает задание "экономичного режима", посредством включения характеристической информации водителя в информацию окружения движения; ввиду этого можно достигать плана движения, который допускает движение с низким расходом топлива.
[0072] Нижеперечисленные преимущества могут получаться за счет устройства управления гибридного транспортного средства согласно второму варианту осуществления.
[0073] (3) Контроллер источника приведения в движение (модуль 1 управления транспортного средства) выполнен с возможностью включать характеристическую информацию водителя в информацию окружения движения, которая используется при задании плана движения.
Соответственно, помимо преимущества (1) или (2), можно повышать точность плана движения и подавлять неожиданный запуск двигателя посредством стиля вождения водителя, при достижении плана движения, который допускает движение с низким расходом топлива.
[0074] Устройство управления гибридного транспортного средства настоящего изобретения описано выше на основе первого варианта осуществления и второго варианта осуществления, но его конкретные конфигурации не ограничены этими вариантами осуществления, и различные модификации и добавления в конструкцию могут вноситься без отступления от объема изобретения согласно каждому пункту формулы изобретения.
[0075] В первом варианте осуществления и втором варианте осуществления показаны примеры, в которых "экономичный режим" автоматически задается, когда "режим на основе плана движения" выбирается в качестве режима приведения в движение. Тем не менее, поскольку достаточно, если выбор "режима на основе плана движения" связывается с операцией задания "экономичного режима", конфигурация может быть конфигурацией, в которой, например, если "режим на основе плана движения" выбирается на этапе S2, процесс переходит к этапу S3A, чтобы инструктировать водителю задавать "экономичный режим", как проиллюстрировано посредством блок-схемы последовательности операций способа на фиг. 8. В этом случае, задание самого "экономичного режима" выполняется посредством операции вручную водителем.
[0076] Таким образом, если водитель задает "экономичный режим", операция водителя подавляется, и можно подавлять неожиданный запуск двигателя, вызываемый посредством стиля вождения водителя, и управлять источником приведения в движение в соответствии с планом движения для достижения движения с низким расходом топлива.
Помимо этого, поскольку задание самого "экономичного режима" выполняется посредством операции вручную водителем, можно выполнять управление, которое учитывает намерение водителя.
[0077] "Инструктировать задание экономичного режима" здесь означает, например, отображение экрана задания "экономичного режима" на дисплее навигационной системы 4, который не показан, либо загорание кнопки задания для "экономичного режима". Помимо этого, водителю может предлагаться задавать "экономичный режим" также посредством голоса.
[0078] Помимо этого, в первом варианте осуществления и втором варианте осуществления, показаны примеры, в которых задание плана движения выполняется посредством задания запланированного режима движения для каждого участка после разделения запланированного маршрута движения на множество участков, но изобретение не ограничено этим. Например, управление потреблением SOC аккумулятора может быть запланировано, или распределение движущей силы двигателя Eng и мотора/генератора MG может задаваться на участках, на которых запланированный режим движения представляет собой "HEV-режим".
[0079] Дополнительно, в вышеописанных вариантах осуществления, показаны примеры, в которых запланированный маршрут движения задается, и когда "режим на основе плана движения" выбирается, весь запланированный маршрут движения, который задается заранее, разделяется на множество участков, после чего план движения задается для каждого участка, но изобретение не ограничено этим. Например, один участок впереди может прогнозироваться относительно текущей позиции, и план движения может задаваться для каждого одного участка.
[0080] Кроме того, в вышеописанных вариантах осуществления, показаны примеры, в которых гибридное транспортное средство S представляет собой гибридное транспортное средство FR-типа (FR hybrid vehicle); тем не менее, гибридное транспортное средство может представлять собой гибридное транспортное средство FF-типа (FF hybrid vehicle) или последовательное гибридное транспортное средство (series-type hybrid vehicle), которое движется посредством мотора, и в котором генератор приводится в действие посредством двигателя. Транспортное средство может представлять собой подключаемое гибридное транспортное средство (plug-in hybrid vehicle). Таким образом, устройство управления настоящего изобретения может применяться к любому гибридному транспортному средству, содержащему двигатель и мотор.
Изобретение относится к гибридным транспортным средствам. Устройство управления режимом для гибридного транспортного средства содержит контроллер источника приведения в движение, при этом в качестве режимов приведения в движение используется режим, который задается для движения с низким расходом топлива на основе информации окружения движения и экономичный режим, который управляет источником приведения в движение таким образом, чтобы приоритезировать эффективность использования топлива выше мощностных рабочих характеристик. Контроллер источника приведения в движение связывает выбор режима на основе плана движения с операцией задания экономичного режима. Режим на основе плана движения выбирается в состоянии, в котором экономичный режим не выбирается и автоматически задается экономичный режим при выборе режима на основе плана движения, когда выбор режима на основе плана движения связывается с операцией задания экономичного режима. Предотвращается неожиданный запуск двигателя. 2 н. и 1 з.п. ф-лы, 8 ил.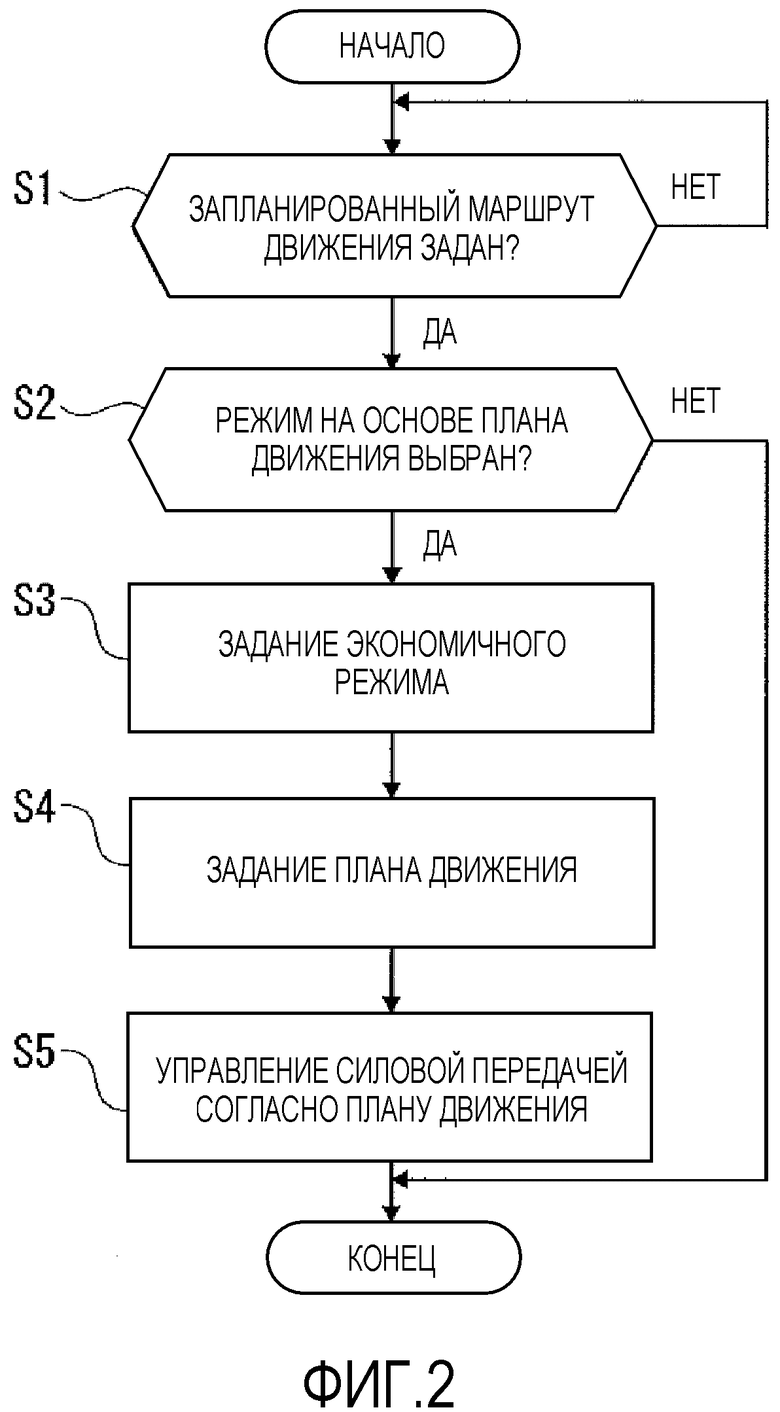
1. Устройство управления режимом для гибридного транспортного средства, установленное в гибридном транспортном средстве, имеющем источник приведения в движение, который включает в себя двигатель и мотор, и навигационную систему, которая получает информацию окружения движения по запланированному маршруту движения, и содержащее: контроллер источника приведения в движение, который выполняет управление источником приведения в движение в соответствии с режимом приведения в движение гибридного транспортного средства, при этом:
- гибридное транспортное средство содержит, в качестве режимов приведения в движение, режим на основе плана движения, который управляет источником приведения в движение в соответствии с планом движения, который задается для движения с низким расходом топлива на основе информации окружения движения, и экономичный режим, который управляет источником приведения в движение таким образом, чтобы приоритезировать эффективность использования топлива выше мощностных рабочих характеристик, и
- контроллер источника приведения в движение выполнен с возможностью связывать выбор режима на основе плана движения с операцией задания экономичного режима, причем режим на основе плана движения выбирается в состоянии, в котором экономичный режим не выбирается и автоматически задавать экономичный режим при выборе режима на основе плана движения, когда выбор режима на основе плана движения связывается с операцией задания экономичного режима.
2. Устройство управления режимом для гибридного транспортного средства, установленное в гибридном транспортном средстве, имеющем источник приведения в движение, который включает в себя двигатель и мотор, и навигационную систему, которая получает информацию окружения движения по запланированному маршруту движения, и содержащее: контроллер источника приведения в движение, который выполняет управление источником приведения в движение в соответствии с режимом приведения в движение гибридного транспортного средства, при этом:
- гибридное транспортное средство содержит, в качестве режимов приведения в движение, режим на основе плана движения, который управляет источником приведения в движение в соответствии с планом движения, который задается для движения с низким расходом топлива на основе информации окружения движения, и экономичный режим, который управляет источником приведения в движение таким образом, чтобы приоритезировать эффективность использования топлива выше мощностных рабочих характеристик, и
- контроллер источника приведения в движение выполнен с возможностью связывать выбор режима на основе плана движения с операцией задания экономичного режима, причем режим на основе плана движения выбирается в состоянии, в котором экономичный режим не выбирается, и инструктировать водителю задавать экономичный режим при выборе режима на основе плана движения, причем выбор режима на основе плана движения связывается с операцией задания экономичного режима.
3. Устройство управления режимом для гибридного транспортного средства по п. 1 или 2, в котором:
- контроллер источника приведения в движение включает характеристическую информацию водителя в информацию окружения движения, которая используется при задании плана движения.
| JP 2011184013 A, 22.09.2011 | |||
| JP 2012095519 A, 17.05.2012 | |||
| US 5815824 A, 29.09.1998 | |||
| JP 2011025778 A, 10.02.2011 | |||
| СИСТЕМА УПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2503559C2 |

