Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к управлению гибридным транспортным средством с двигателем и электромотором в качестве источников приведения в движение.
Уровень техники
[0002] JP2007-202222A описывает, в качестве управления гибридным транспортным средством, управление ограничением выходной мощности электромотора, если температура электромотора превышает предварительно определенную температуру в состоянии, когда транспортное средство движется по поверхности дороги, имеющей большее сопротивление движению, чем на поверхностях проезжей части дороги, например, движется по песку. Это управление имеет целью удовлетворять рабочую характеристику движения, в то же время предотвращая перегрев электромотора.
Сущность изобретения
[0003] В управлении из вышеуказанного документа, то, ограничивать или нет выходную мощность электромотора, решается на основе температуры электромотора. Таким образом, например, даже в ситуации, когда сопротивление движению является большим до такой степени, что предварительно определенное ускорение транспортного средства не может быть получено только посредством выходной мощности двигателя, выходная мощность электромотора не ограничивается, пока электромотор не перегреется. Это вынуждает продолжать вывод мощности электромотора с тем, чтобы удовлетворять требование водителя.
[0004] Когда сопротивление движению увеличивается, выходная мощность, необходимая для движения, увеличивается, и величина расхода мощности увеличивается. Таким образом, если электромотор продолжает выводить мощность с тем, чтобы удовлетворять запрос водителя в ситуации, когда сопротивление движению является большим, как описано выше, существует вероятность, что ускоряется снижение величины заряда аккумулятора, и помощь посредством электромотора не может быть выполнена.
[0005] Соответственно, настоящее изобретение имеет целью сдерживание уменьшения величины заряда аккумулятора, в то же время осуществляя помощь посредством электромотора в ситуации, когда сопротивление движению является большим, например, на песке.
[0006] Согласно одному варианту осуществления настоящего изобретения предоставляется устройство управления гибридным транспортным средством для управления гибридным транспортным средством с двигателем и электромотором в качестве источников приведения в движение транспортного средства. Устройство управления для управления гибридным транспортным средством включает в себя блок определения движения по дороге с высокой нагрузкой, сконфигурированный, чтобы определять, движется или нет транспортное средство по поверхности дороги с высоким сопротивлением движению, предварительно определенное ускорение транспортного средства является недостижимым на поверхности дороги с высоким сопротивлением движению за счет выходной мощности одного лишь двигателя; и блок настройки выходной мощности мотора, сконфигурированный, чтобы ограничивать выходную мощность мотора, когда скорость транспортного средства достигает предварительно определенной скорости транспортного средства в случае движения по поверхности дороги с высоким сопротивлением движению.
Краткое описание чертежей
[0007] Фиг. 1 - это общая схема системы гибридного транспортного средства.
Фиг. 2 - это блок-схема, показывающая конфигурацию блока управления выходной мощностью мотор/генератора.
Фиг. 3 - это блок-схема, показывающая конфигурацию блока определения движения по дороге с высокой нагрузкой.
Фиг. 4 - это блок-схема, показывающая конфигурацию блока вычисления выходной мощности мотора.
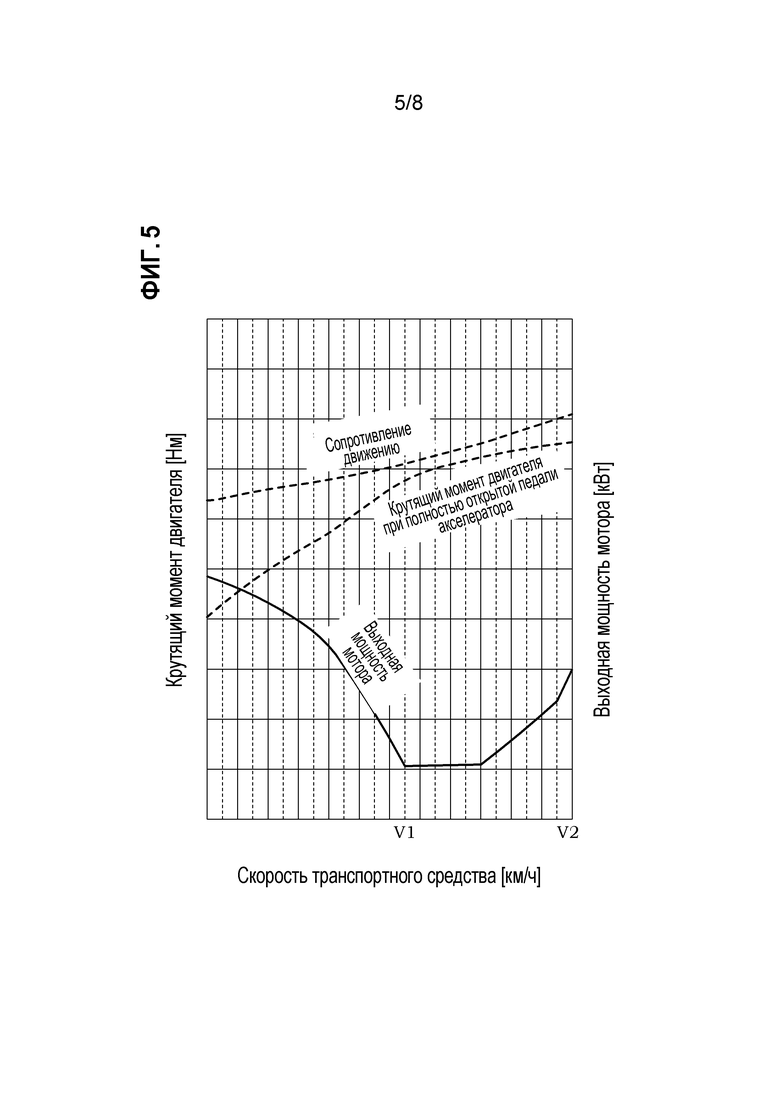
Фиг. 5 - это график, показывающий соотношение крутящего момента двигателя, выходной мощности мотора и сопротивления движению.
Фиг. 6 - это блок-схема последовательности операций, показывающая программу управления для мотор/генератора.
Фиг. 7 - это временная диаграмма в случае выполнения программы управления на фиг. 6.
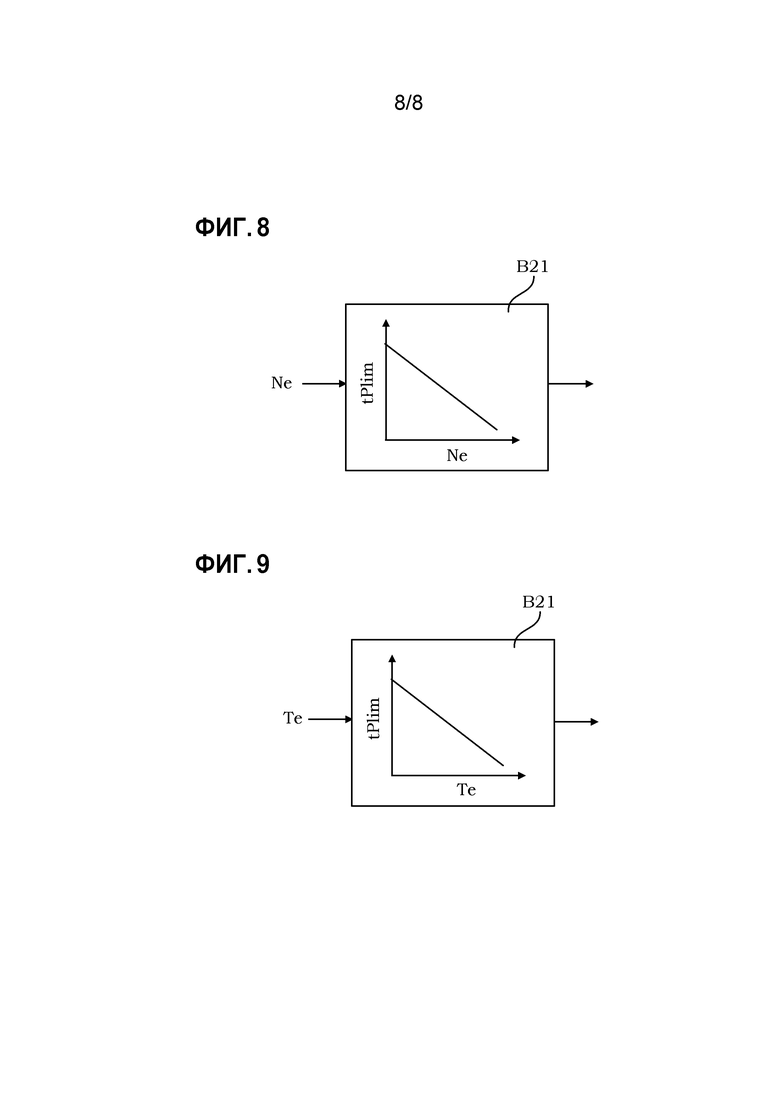
Фиг. 8 - это схема, показывающая другой пример блока вычисления целевой выходной мощности мотора.
Фиг. 9 - это схема, показывающая еще один пример блока вычисления целевой выходной мощности мотора.
Подробное описание варианта осуществления
[0008] Далее в данном документе, вариант осуществления настоящего изобретения описывается со ссылкой на сопровождающие чертежи.
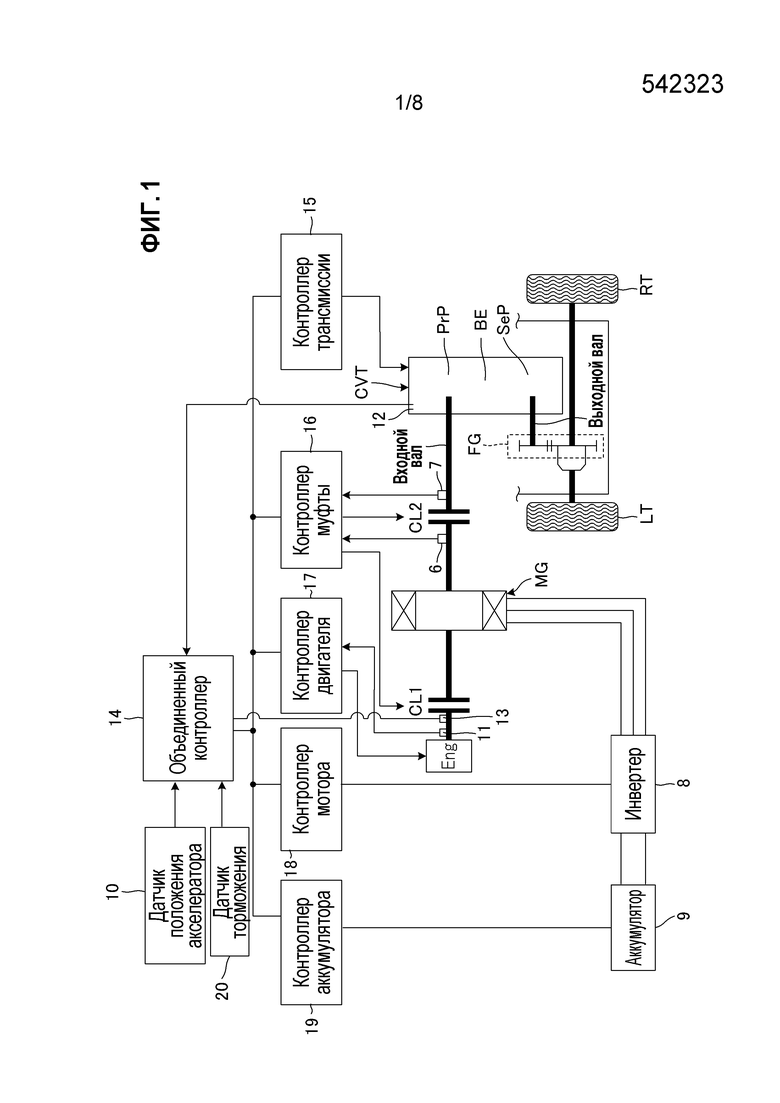
[0009] Фиг. 1 - это общая схема системы, показывающая параллельное гибридное транспортное средство (пример гибридного транспортного средства), к которому применяется устройство управления гибридным транспортным средством настоящего варианта осуществления. Конфигурации системы приведения в движение и системы управления описываются ниже на основе фиг. 1.
[0010] Как показано на фиг. 1, система приведения в движение параллельного гибридного транспортного средства включает в себя первую муфту CL1, мотор/генератор (электромотор) MG, вторую муфту CL2, бесступенчатую трансмиссию CVT, редуктор FG, левое ведущее колесо LT и правое ведущее колесо RT.
[0011] Система управления гибридного транспортного средства имеет режимы движения, такие как режим движения электрического транспортного средства (далее в данном документе называемый "EV-режимом"), режим движения гибридного транспортного средства (далее в данном документе называемый "HEV-режимом") и режим движения псевдо-электрического транспортного средства (далее в данном документе называемый "псевдо-EV-режимом") и WSC-режим (мокрая муфта для начала движения).
[0012] "EV-режим" - это режим, в котором транспортное средство движется только с помощью мощности мотора/генератора MG с расцепленной первой муфтой CL1. "HEV-режим" - это режим, в котором транспортное средство движется в любом одном из режима движения с помощью мотора, режима выработки мощности для движения и режима движения от двигателя со сцепленной первой муфтой CL1. "Псевдо-EV-режим" - это режим, в котором транспортное средство движется только с помощью мощности мотор/генератора MG со сцепленной первой муфтой CL1, но с выключенным двигателем Eng. "WSC-режим" - это режим, в котором состояние проскальзывания второй муфты CL2 поддерживается посредством управления скоростью вращения мотор/генератора MG в моменты времени, такие как переключение из диапазонов P, N на D из "HEV-режима" и выбор D-диапазона из "EV-режима" или "HEV-режима". WSС-режим запускает транспортное средство, в то же время управляя максимальным крутящим моментом муфты, так что передаваемый крутящий момент муфты, проходящий через вторую муфту CL2, достигает требуемого крутящего момента приведения в движение, определенного согласно состоянию транспортного средства и действию водителя.
[0013] Двигатель Eng управляется так, что крутящий момент двигателя соответствует командному значению, посредством управления объемом всасывания воздуха посредством приведения в движение дроссельного клапана, объемом впрыска топлива посредством инжектора и моментом зажигания посредством свечи зажигания.
[0014] Первая муфта CL1 вставляется между двигателем Eng и мотор/генератором MG. Сухая муфта, нормально замкнутая посредством отклоняющего усилия диафрагменной пружины, например, используется в качестве этой первой муфты CL1 и сцепляется, наполовину сцепляется или расцепляется между двигателем Eng и мотор/генератором MG. Крутящий момент мотора и крутящий момент двигателя передаются второй муфте CL2, если эта первая муфта CL1 находится в полностью сцепленном состоянии, и только крутящий момент мотора передается второй муфте CL2, если первая муфта CL1 находится в расцепленном состоянии. Следует отметить, что управление частичным сцеплением/расцеплением выполняется посредством управления ходом для гидравлического актуатора.
[0015] Мотор/генератор MG имеет структуру синхронного мотора переменного тока, выполняет управление крутящим моментом приведения в движение и управление скоростью вращения при запуске и во время движения и восстанавливает кинетическую энергию транспортного средства для аккумулятора 9 посредством рекуперативного управления тормозами во время торможения и во время замедления.
[0016] Вторая муфта CL2 является обычно расцепленной мокрой многодисковой муфтой или мокрым многодисковым тормозом и формирует крутящий момент трансмиссии (максимальный крутящий момент муфты) согласно гидравлическому давлению муфты (прижимающему усилию). Эта вторая муфта CL2 передает крутящий момент, выводимый от двигателя Eng и мотор/генератора MG (когда первая муфта CL1 сцеплена), левому и правому ведущим колесам LT, RT через бесступенчатую трансмиссию CVT и редуктор FG.
[0017] Следует отметить, что независимая муфта может быть установлена в качестве второй муфты CL2 между бесступенчатой трансмиссией CVT и левым и правым ведущими колесами LT, RT помимо установки между мотор/генератором MG и бесступенчатой трансмиссией CVT, как показано на фиг. 1.
[0018] Бесступенчатая трансмиссия CVT является бесступенчатой трансмиссией с V-образным ремнем, включающей в себя первичный шкив PrP, соединенный с входным валом трансмиссии "input", вторичный шкив SeP, соединенный с выходным валом трансмиссии "output", и приводной ремень BE, установленный между первичным шкивом PrP и вторичным шкивом SeP.
[0019] Первичный шкив PrP включает в себя неподвижный ролик, прикрепленный к входному валу "input" трансмиссии, и подвижный ролик, поддерживаемый скользящим образом на входном валу "input" трансмиссии. Вторичный шкив SeP включает в себя неподвижный ролик, прикрепленный к выходному валу "output" трансмиссии, и подвижный ролик, поддерживаемый скользящим образом на выходном валу "output" трансмиссии.
[0020] Приводной ремень BE - это металлический ремень, намотанный между первичным шкивом PrP и вторичным шкивом SeP и расположенный между каждым неподвижным роликом и каждым подвижным роликом. Здесь, используется так называемый ремень VDT-типа, который конфигурируется посредством наложения множества элементов, каждый имеет наклонные поверхности, которые должны соответственно приводиться в соприкосновение с неподвижным роликом и подвижным роликом с обеих сторон, наложения тонкой пластины слоистым образом и расположения двух наборов колец, сформированных в круглую кольцеобразную форму с обеих сторон элементов.
[0021] Когда ширины шкивов для обоих шкивов PrP и SeP изменяются, диаметр фрагмента, где приводной ремень BE и наклонные поверхности касаются друг друга, изменяется. Передаточное отношение (соотношение шкивов) свободно управляется с помощью этой характеристики. Здесь, если ширина шкива для первичного шкива PrP увеличивается, а ширина шкива для вторичного шкива SeP уменьшается, передаточное отношение изменяется в сторону понижения. Дополнительно, если ширина шкива для первичного шкива PrP уменьшается, а ширина шкива для вторичного шкива SeP увеличивается, передаточное отношение изменяется в сторону повышения.
[0022] Как показано на фиг. 1, система управления параллельного гибридного транспортного средства включает в себя датчик 6 скорости вращения на входе второй муфты, датчик 7 скорости вращения на выходе второй муфты, инвертор 8, аккумулятор 9, датчик 10 положения акселератора, датчик 11 скорости вращения двигателя, датчик 12 температуры масла, датчик 13 положения хода, объединенный контроллер 14, контроллер 15 трансмиссии, контроллер 16 муфты, контроллер 17 двигателя, контроллер 18 мотора, контроллер 19 аккумулятора, датчик 20 тормоза и т.п.
[0023] Инвертор 8 выполняет преобразования постоянный ток/переменный ток, чтобы генерировать ток возбуждения для мотор/генератора MG. Аккумулятор 9 аккумулирует рекуперативную энергию от мотор/генератора MG через инвертор 8.
[0024] Объединенный контроллер 14 вычисляет целевой крутящий момент приведения в движение из состояния аккумулятора, открытия педали акселератора, скорости транспортного средства (значения, синхронизированного со скоростью вращения выходного вала трансмиссии), температуры гидравлического масла и т.п. Затем, объединенный контроллер 14 вычисляет командное значение для каждого силового привода (мотор/генератора MG, двигателя Eng, первой муфты CL1, второй муфты CL2, бесступенчатой трансмиссии CVT) на основе результата вычисления и передает командное значение каждому контроллеру 15, 16, 17, 18, 19.
[0025] Контроллер 15 трансмиссии выполняет управление переключением передач, например, посредством управления гидравлическим давлением, которое должно подаваться к бесступенчатой трансмиссии CVT, так что команда переключения передачи от объединенного контроллера 14 успешно выполняется.
[0026] Контроллер 16 муфты имеет информацию датчика от датчика 6 скорости вращения входного вала второй муфты и датчика 7 скорости вращения выходного вала второй муфты, введенную в него, и управляет током соленоидного клапана, выводя командное значение величины хода первой муфте CL1 и выводя командное значение гидравлического давления муфты второй муфте CL2, чтобы реализовать командное значение гидравлического давления (тока) каждой муфты. Таким образом, задается величина хода муфты для первой муфты CL1, и задается прижимающее усилие второй муфты CL2. Следует отметить, что величина хода муфты для первой муфты CL1 обнаруживается посредством датчика 13 положения хода.
[0027] Контроллер 17 двигателя вводит информацию датчика от датчика 11 скорости вращения двигателя и выполняет управление крутящим моментом двигателя, чтобы достигать командного значения крутящего момента двигателя от объединенного контроллера 14.
[0028] Контроллер 18 мотора управляет мотор/генератором MG, чтобы достигать командного значения крутящего момента мотора и командного значения скорости вращения мотора от объединенного контроллера.
[0029] Контроллер 19 аккумулятора управляет величиной SOC заряда аккумулятора для аккумулятора 9 и передает эту информацию объединенному контроллеру 14.
[0030] Следует отметить, что каждый контроллер 14-19 конфигурируется посредством микрокомпьютера, включающего в себя центральный процессор (CPU), постоянное запоминающее устройство (ROM), оперативное запоминающее устройство (RAM) и интерфейс ввода/вывода (I/O-интерфейс). Дополнительно, каждый контроллер 14-19 может состоять из множества микрокомпьютеров.
[0031] Далее описывается управление выходной мощностью мотор/генератора MG в настоящем варианте осуществления.
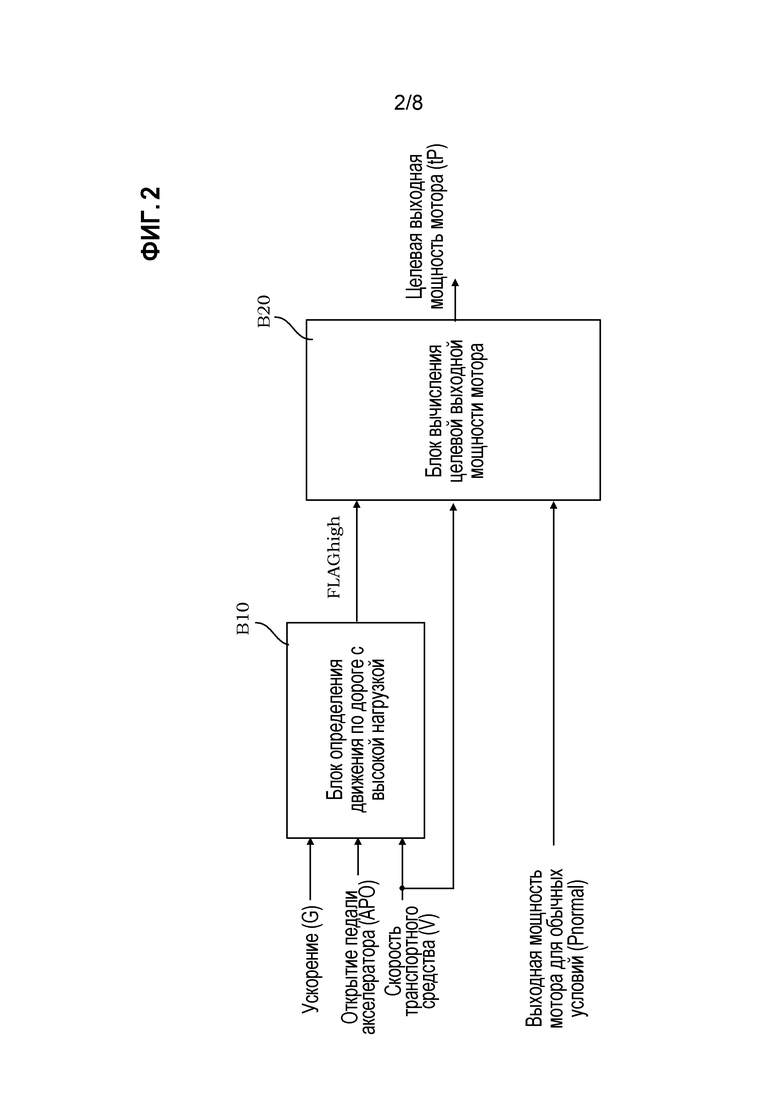
[0032] Фиг. 2 - это блок-схема, показывающая конфигурацию блока управления выходной мощностью для мотор/генератора MG. Следует отметить, что каждый блок, показанный на фиг. 2, является виртуальным блоком, представляющим функцию объединенного контроллера 14, и не означает физическое присутствие.
[0033] Блок управления выходной мощностью для мотор/генератора MG конфигурируется, чтобы включать в себя блок B10 определения движения по дороге с высокой нагрузкой и блок B20 вычисления целевой мощности мотора (блок задания выходной мощности мотора).
[0034] Блок B10 определения движения по дороге с высокой нагрузкой определяет, на основе ускорения G транспортного средства, открытия APO педали акселератора и скорости V транспортного средства, находится или нет транспортное средство в состоянии движения по дороге с высокой нагрузкой, и выводит флаг FLAGhigh определения запроса движения по дороге с высокой нагрузкой в блоке B20 вычисления целевой выходной мощности мотора, когда транспортное средство находится в состоянии движения по дороге с высокой нагрузкой. Конкретный способ определения описывается позже.
[0035] Состояние движения по дороге с высокой нагрузкой, упомянутое здесь, является состоянием, когда предварительно определенное ускорение транспортного средства не может быть получено посредством выходной мощности только двигателя Eng, например, в случае, когда транспортное средство движется в месте, имеющем большее сопротивление движению, чем дороги с дорожным покрытием, например, движется по песку. Следует отметить, что состояние, когда предварительно определенное ускорение транспортного средства не может быть получено, включает в себя состояние, когда транспортное средство не может ускориться.
[0036] Следует отметить, что ускорение G может быть вычислено из величины изменения в скорости V транспортного средства или может быть обнаружено посредством предоставленного датчика ускорения.
[0037] Блок B20 вычисления целевой выходной мощности мотора вычисляет целевую выходную мощность tP мотора, которая является целевой выходной мощностью мотор/генератора MG, на основе флага FLAGhigh определения запроса движения по дороге с высокой нагрузкой, скорости V транспортного средства и целевой выходной мощности tPnormal мотора для обычных условий, как описано позже.
[0038] Целевая выходная мощность tPnormal мотора для обычных условий является целевой выходной мощностью мотора, заданной в состоянии, отличном от состояния движения по дороге с высокой нагрузкой, и вычисленной способом, аналогичным способу в известном управлении для гибридных транспортных средств.
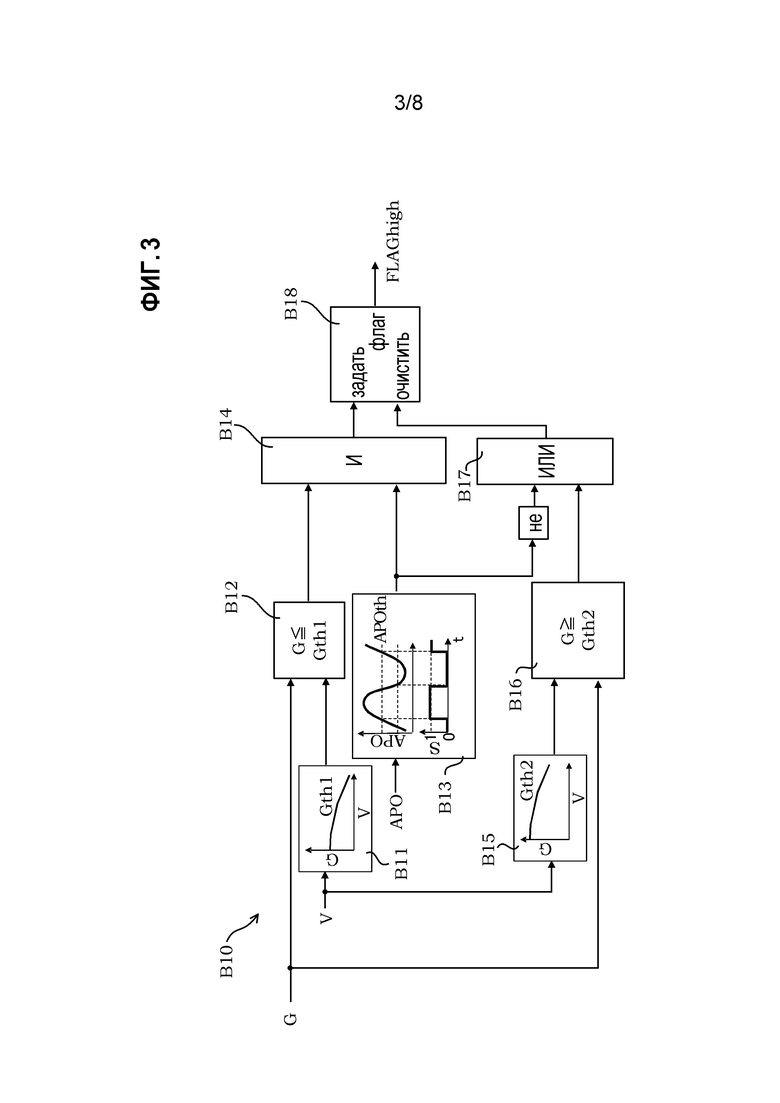
[0039] Фиг. 3 - это блок-схема, показывающая конкретное содержимое определения движения по дороге с высокой нагрузкой, выполняемого в блоке B10 определения движения по дороге с высокой нагрузкой.
[0040] Первый блок B11 определения ускорения вычисляет первое пороговое значение Gth1 ускорения, выполняя поиск в таблице пороговых значений ускорения, задающей первое пороговое значение Gth1 ускорения для каждой скорости транспортного средства относительно текущей скорости V транспортного средства, и выводит вычисленное первое пороговое значение Gth1 ускорения в первый блок B12 определения. Первое пороговое значение Gth1 ускорения является ускорением, с которым транспортное средство, как может быть определено, должно двигаться по дороге с высокой нагрузкой, например, по песку, например, когда открытие APO педали акселератора устанавливается в пороговое значение APOth открытия педали акселератора, которое должно быть описано позже, при текущей скорости V транспортного средства. В таблице пороговых значений ускорения, чем выше скорость транспортного средства, тем меньше первое пороговое значение Gth1 ускорения. Это основывается на известной характеристике уменьшения ускорения G, когда скорость транспортного средства увеличивается вследствие причин управления и вследствие технических причин, таких как двигатель и трансмиссия.
[0041] Первый блок B12 определения определяет, равно или меньше ускорение G первого порогового значения Gth1 ускорения, и выводит результат определения во второй блок B14 определения.
[0042] Блок B13 определения открытия педали акселератора определяет, равно или больше открытие APO педали акселератора порогового значения APOth открытия педали акселератора, и устанавливает выходное значение S в 1, S=1, если открытие APO педали акселератора равно или больше порогового значения APOth открытия педали акселератора, и устанавливает выходное значение S в 0, S=0, в ином случае. Пороговое значение APOth открытия педали акселератора может быть, например, значением, эквивалентным полному открытию, или значением, эквивалентным значительному открытию, почти полному открытию.
[0043] Выходное значение S=1 является выходными данными для второго блока B14 определения, если открытие APO педали акселератора равно или больше порогового значения APOth открытия педали акселератора, тогда как выходное значение S=0 является выходными данными для четвертого блока B17 определения, если открытие APO педали акселератора меньше порогового значения APOth открытия педали акселератора.
[0044] Следует отметить, что, поскольку открытие педали акселератора точно изменяется в зависимости от состояния поверхности дороги, по которой транспортное средство движется, ненамеренного воздействия на педаль акселератора от водителя и т.п., существует вероятность того, что результат определения о состоянии движения по дороге с высокой нагрузкой переключается в коротком цикле. В этом случае целевая выходная мощность tP мотора, которая должна быть описана позже, изменяется в коротком цикле, и у водителя возникает ощущение дискомфорта. Соответственно, в настоящем варианте осуществления, предоставляется гистерезис для порогового значения APOth открытия педали акселератора, так что, после того как устанавливается выходное значение S=1, выходное значение S=0 не устанавливается немедленно, даже если открытие APO педали акселератора становится меньше порогового значения APOth открытия педали акселератора впоследствии.
[0045] Второй блок B15 определения ускорения вычисляет второе пороговое значение Gth2 ускорения из таблицы пороговых значений ускорения и скорости V транспортного средства аналогично первому блоку B11 определения ускорения и выводит второе пороговое значение Gth2 ускорения в третий блок B16 определения. В таблице пороговых значений ускорения, используемой во втором блоке B15 определения ускорения, второе пороговое значение Gth2 ускорения также уменьшается, когда скорость V транспортного средства увеличивается.
[0046] Второе пороговое значение Gth2 ускорения является ускорением, предполагаемым, например, когда открытие APO педали акселератора равно пороговому значению APOth открытия педали акселератора при текущей скорости транспортного средства на дороге с дорожным покрытием. Таким образом, если скорость транспортного средства является одинаковой, второе пороговое значение Gth2 ускорения больше первого порогового значения Gth1 ускорения.
[0047] Третий блок B16 определения определяет, действительно или нет ускорение G равно или больше второго порогового значения Gth2 ускорения, и выводит результат определения в четвертый блок B17 определения.
[0048] Блок B18 установки флага определяет, что транспортное средство находится в состоянии движения по дороге с высокой нагрузкой, если удовлетворяются условия, что ускорение G равно или меньше первого порогового значения Gth1 ускорения и S=1 во втором блоке B14 определения, и устанавливает флаг FLAGhigh определения запроса движения по дороге с высокой нагрузкой. С другой стороны, блок B18 установки флага определяет, что транспортное средство не находится в состоянии движения по дороге с высокой нагрузкой, если удовлетворяется любое из условий, что ускорение G выше первого порогового значения Gth1 ускорения, ускорение G равно или больше второго порогового значения Gth2 ускорения, и S=0, в четвертом блоке B17 определения. Если флаг FLAGhigh определения запроса движения по дороге с высокой нагрузкой уже установлен, этот флаг очищается. Следует отметить, что, после того как флаг FLAGhigh определения запроса движения по дороге с высокой нагрузкой установлен, т.е., после того как установлен FLAGhigh=1, FLAGhigh=1 сохраняется до тех пор, пока не будет удовлетворено условие очистки.
[0049] Как описано выше, блок B10 определения движения по дороге с высокой нагрузкой определяет, что транспортное средство находится в состоянии движения по дороге с высокой нагрузкой, если открытие APO педали акселератора равно или больше порогового значения APOth открытия педали акселератора, и ускорение G равно или меньше первого порогового значения Gth1 ускорения. Таким образом, может быть точно обнаружено, что транспортное средство движется по поверхности дороги, имеющей большее сопротивление движению, чем дорога с дорожным покрытием, например, движется по песку или т.п.
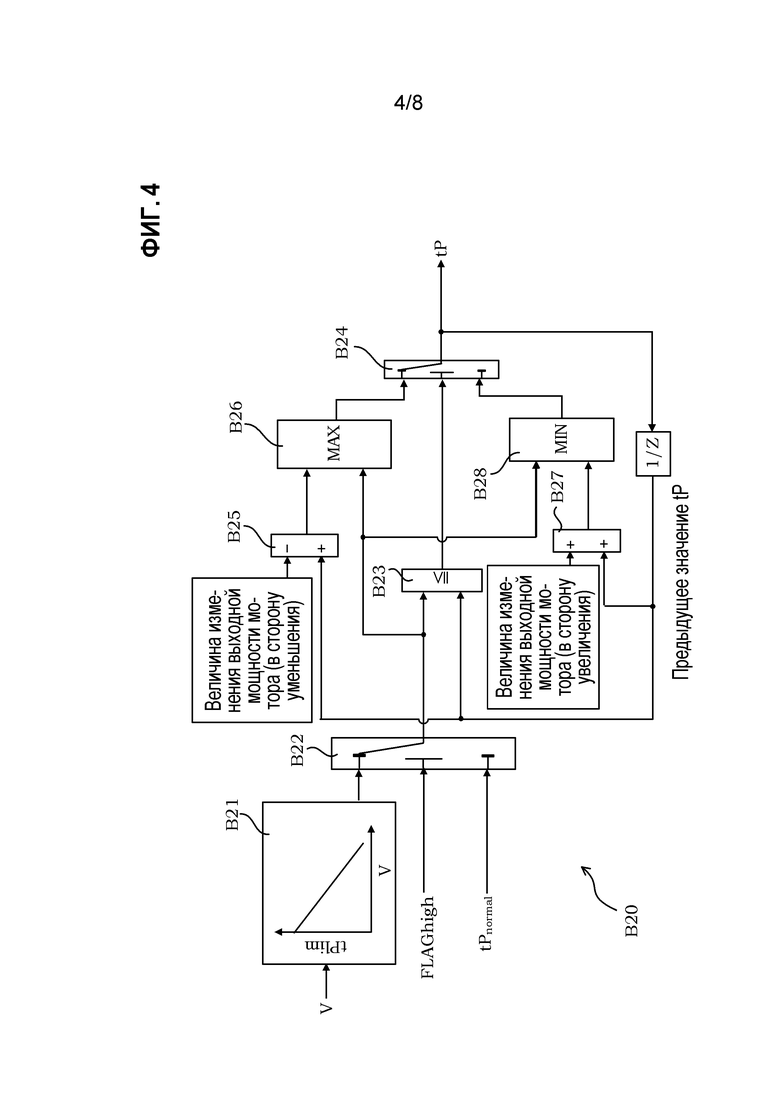
[0050] Фиг. 4 - это блок-схема, показывающая конкретный способ вычисления целевой выходной мощности tP мотора, выполняемый в блоке B20 вычисления целевой выходной мощности мотора.
[0051] Блок B21 вычисления целевой выходной мощности мотора вычисляет целевую выходную мощность tPlim мотора для состояния движения по дороге с высокой нагрузкой, выполняя поиск в карте выходной мощности мотора, сохраненной заранее относительно скорости V транспортного средства.
[0052] Целевая выходная мощность tPlim мотора для состояния движения по дороге с высокой нагрузкой является выходной мощностью мотора, необходимой для движения с постоянной скоростью при целевой скорости транспортного средства. Здесь, целевая скорость транспортного средства (далее в данном документе называемая целевой постоянной скоростью транспортного средства) является скоростью транспортного средства, меньшей, чем целевая скорость транспортного средства, определенная из открытия педали акселератора и т.п., т.е. скоростью транспортного средства, меньшей, чем скорость, запрашиваемая водителем. В частности, целевая скорость транспортного средства - это скорость транспортного средства, при которой различие между крутящим моментом при полностью открытой дроссельной заслонке двигателя Eng и выходной мощностью мотора является наименьшим. Это описывается со ссылкой на фиг. 5.
[0053] Фиг. 5 - это график, показывающий соотношение между крутящим моментом двигателя Eng, выходной мощностью мотора, скоростью транспортного средства и сопротивлением движению в состоянии движения по дороге с высокой нагрузкой. Следует отметить, что, поскольку запрашиваемая скорость транспортного средства ниже в состоянии движения по дороге с высокой нагрузкой, чем при движении по дороге с дорожным покрытием, скорость V2 транспортного средства на фиг. 5 является средней скоростью (например, около 40 км/ч).
[0054] Чтобы двигаться с постоянной скоростью транспортного средства, когда сопротивление движению больше крутящего момента при полностью открытой дроссельной заслонке, различие между сопротивлением движению и крутящим моментом при полностью открытой дроссельной заслонке может быть компенсировано посредством выходной мощности мотора.
[0055] Крутящий момент при полностью открытой дроссельной заслонке, как правило, имеет выпуклый вверх профиль в диапазоне, включающем в себя диапазон высокой скорости, непоказанный на фиг. 5. На фиг. 5 различие между крутящим моментом полностью открытого двигателя и сопротивлением движению является наименьшим при скорости V1 транспортного средства. Т.е. выходная мощность мотора, необходимая для движения с постоянной скоростью, является наименьшей при скорости V1 транспортного средства. Другими словами, если транспортное средство движется с постоянной скоростью V1 транспортного средства, величина расхода мощности в мотор/генераторе MG минимизируется, и мотор/генератор MG может приводиться в действие в течение более длительного времени. Следует отметить, что скорость V1 транспортного средства является низкой скоростью (например, около 20 км/ч).
[0056] Соответственно, целевая выходная мощность tPlim мотора, вычисленная в блоке B21 вычисления целевой выходной мощности мотора, имеет такую величину, что ускорение является возможным вплоть до скорости V1 транспортного средства, если скорость V транспортного средства ниже скорости V1 транспортного средства, и транспортное средство может двигаться с постоянной скоростью V1 транспортного средства по достижении скорости V1 транспортного средства.
[0057] Снова описывается фиг. 4.
[0058] Первый блок B22 переключения выбирает целевую выходную мощность tPlim мотора для состояния движения по дороге с высокой нагрузкой, если транспортное средство находится в состоянии движения по дороге с высокой нагрузкой, и выбирает целевую выходную мощность tPnormal мотора для обычных условий, если транспортное средство не находится в состоянии движения по дороге с высокой нагрузкой. Выбранная выходная мощность мотора выводится в блоке B23 определения, блок B26 выбора максимального значения и блок B28 выбора минимального значения.
[0059] Предыдущее значение целевой выходной мощности tP мотора также загружается в блок B23 определения, который определяет, действительно или нет выходная мощность мотора, выбранная в первом блоке B22 переключения, равна или меньше предыдущего значения целевой выходной мощности tP мотора.
[0060] Дополнительно, предыдущее значение целевой выходной мощности tP мотора также загружается в блок B25 вычисления предельного значения в сторону уменьшения и блок B27 вычисления предельного значения в сторону увеличения.
[0061] Блок B25 вычисления предельного значения в сторону уменьшения выводит предельное значение в сторону уменьшения, полученное вычитанием величины изменения выходной мощности мотора в сторону уменьшения, установленной заранее, из предыдущего значения целевой выходной мощности tP мотора, в блок B26 выбора максимального значения. Величина изменения выходной мощности мотора в сторону уменьшения является такой величиной уменьшения выходной мощности мотора, чтобы сдерживать уменьшение в скорости транспортного средства, сопровождающее уменьшение в выходной мощности мотора до такой степени, чтобы не обеспечивать ощущение дискомфорта водителю, и устанавливается посредством адаптации к каждому типу транспортного средства, к которому настоящий вариант осуществления применяется.
[0062] Блок B27 вычисления предельного значения в сторону увеличения выводит предельное значение в сторону увеличения, полученное добавлением величины изменения выходной мощности мотора в сторону увеличения, установленной заранее, к предыдущему значению целевой выходной мощности tP мотора, в блок B28 выбора минимального значения. Величина изменения выходной мощности мотора в сторону увеличения является такой величиной увеличения выходной мощности мотора, чтобы сдерживать увеличение в скорости транспортного средства, сопровождающее увеличение в выходной мощности мотора, до такой степени, чтобы не обеспечивать ощущение дискомфорта водителю, и устанавливается посредством адаптации к каждому типу транспортного средства, к которому настоящий вариант осуществления применяется.
[0063] Блок B26 выбора максимального значения сравнивает выходную мощность мотора, выбранную в первом блоке B22 переключения, и предельное значение в сторону уменьшения и выбирает большее значение.
[0064] Блок B28 выбора минимального значения сравнивает выходную мощность мотора, выбранную в первом блоке B22 переключения, и предельное значение в сторону увеличения и выбирает меньшее значение.
[0065] Второй блок B24 переключения устанавливает выходную мощность мотора, выбранную в блоке B26 выбора максимального значения или блоке B28 выбора минимального значения, в качестве целевой выходной мощности tP мотора согласно результату определения блока B23 определения. В частности, выходная мощность мотора, выбранная в блоке B26 выбора максимального значения, устанавливается в качестве целевой выходной мощности tP мотора, если выходная мощность мотора, выбранная в первом блоке B22 переключения, равна или меньше предыдущего значения целевой выходной мощности tP мотора, тогда как выходная мощность мотора, выбранная в блоке B28 выбора минимального значения, устанавливается в качестве целевой выходной мощности tP мотора, в ином случае.
[0066] При установке целевой выходной мощности tP мотора выходная мощность мотора, выбранная в первом блоке B22 переключения, может быть непосредственно установлена в качестве целевой выходной мощности tP мотора. Однако, поскольку у водителя возникает ощущение дискомфорта, если внезапное изменение в скорости транспортного средства или т.п. происходит посредством изменения выходной мощности мотора, величины изменения в сторону увеличения и сторону уменьшения ограничиваются, чтобы предотвращать это, как описано выше в настоящем варианте осуществления.
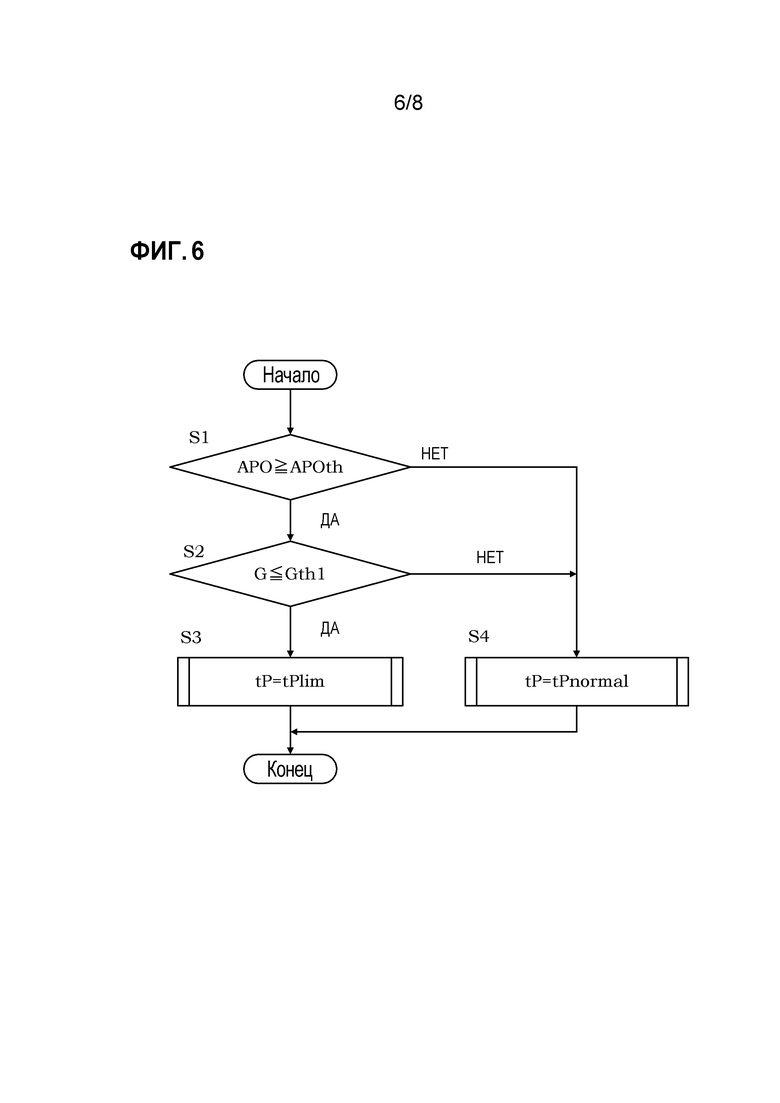
[0067] Фиг. 6 - это блок-схема последовательности операций программы управления для мотор/генератора MG, описанного выше. Эта программа циклически выполняется с короткими интервалами, например, в несколько миллисекунд. Эта программа описывается в соответствии с этапами ниже:
[0068] На этапе S1 объединенный контроллер 14 определяет, действительно или нет открытие APO педали акселератора равно или больше порогового значения APOth открытия педали акселератора, и выполняет обработку этапа S2, если результат определения является утвердительным, в то время как выполняет обработку этапа S4, если результат определения является отрицательным.
[0069] На этапе S2 объединенный контроллер 14 выполняет определение по ускорению G и выполняет обработку этапа S3, если ускорение G равно или меньше первого порогового значения Gth1 ускорения, в то время как выполняет обработку этапа S4, если ускорение G равно или больше второго порогового значения Gth2 ускорения.
[0070] На этапе S3 объединенный контроллер 14 устанавливает целевую выходную мощность tPlim мотора для состояния движения по дороге с высокой нагрузкой в качестве целевой выходной мощности tP мотора и управляет мотор/генератором MG.
[0071] На этапе S4 объединенный контроллер 14 устанавливает целевую выходную мощность tPnormal мотора для обычных условий в качестве целевой выходной мощности tP мотора и управляет мотор/генератором MG. Конкретное содержимое управления не описывается, поскольку оно является таким же, что и для известного управления мотором для гибридных транспортных средств.
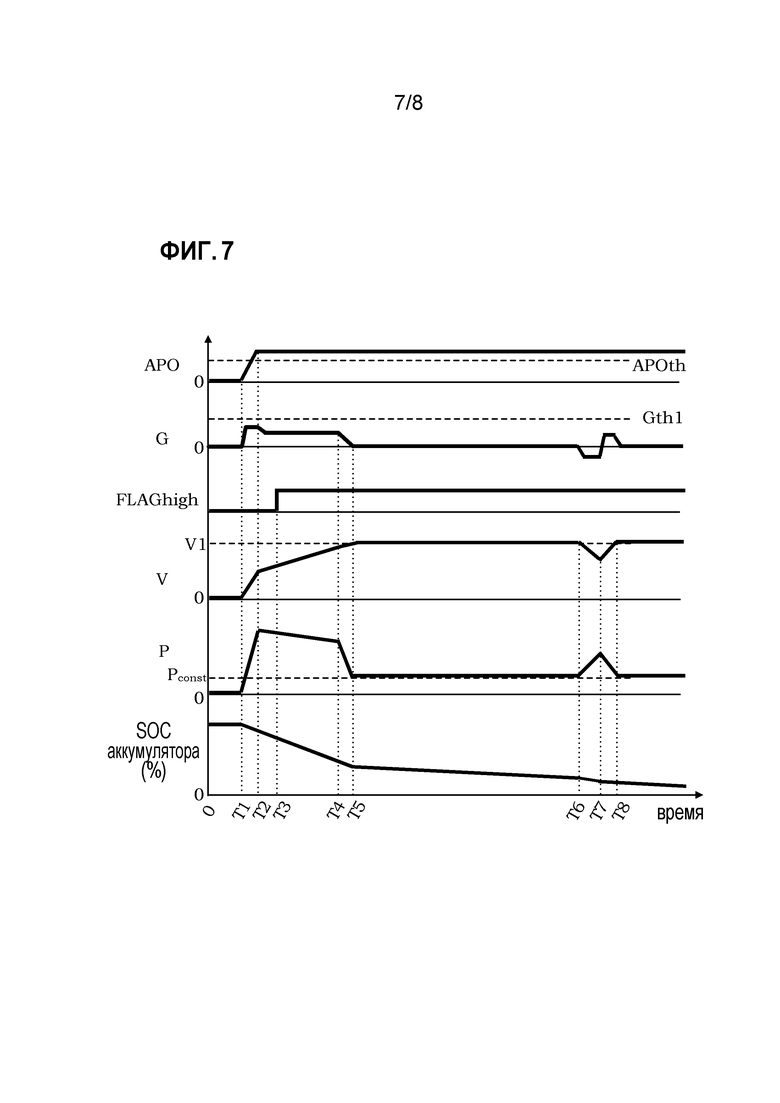
[0072] Фиг. 7 - это временная диаграмма, когда программа управления на фиг. 6 выполняется, когда транспортное средство движется по песку, имеющему большое сопротивление движению.
[0073] Когда водитель начинает нажимать педаль акселератора в момент времени T1, когда транспортное средство остановлено, транспортное средство начинает двигаться с помощью мотор/генератора MG.
[0074] Однако, поскольку сопротивление движению является большим, ускорение G прекращает увеличиваться, прежде чем достигается момент времени T2, и становится значением, меньше первого порогового значения Gth1 ускорения. Ассоциированная с этим скорость V транспортного средства также надлежащим образом увеличивается после момента времени T2. На этой стадии целевая выходная мощность tP мотор/генератора MG является целевой выходной мощностью tPnormal мотора для обычных условий.
[0075] В момент времени T3 удовлетворяются условия для определения того, что транспортное средство находится в состоянии движения по дороге с высокой нагрузкой, когда открытие APO педали акселератора равно или больше порогового значения APOth открытия педали акселератора, и ускорение G равно или меньше первого порогового значения Gth1 ускорения. Таким образом, устанавливается флаг FLAGhigh определения движения по дороге с высокой нагрузкой. Таким образом, целевая выходная мощность tP мотор/генератора MG переключается на целевую выходную мощность tPlim мотора для состояния движения по дороге с высокой нагрузкой.
[0076] Следует отметить, что существует запаздывание по времени до тех пор, пока не будет определено в момент времени T3, что транспортное средство находится в состоянии движения по дороге с высокой нагрузкой, после того как условия для определения того, что транспортное средство находится в состоянии движения по дороге с высокой нагрузкой, удовлетворяются в момент времени T2, поскольку первое определение выполняется в момент времени T3. Как только что описано, в настоящем варианте осуществления, программа управления на фиг. 6 начинается в момент времени T3, достигнутый после того, как состояние, когда открытие APO педали акселератора больше порогового значения APOth открытия педали акселератора, сохраняется в течение предварительно определенного времени. Программа управления не начинается непосредственно после того, как педаль акселератора нажимается, поскольку точное определение не может быть выполнено непосредственно после того, как педаль акселератора нажимается. В частности, даже на песке или т.п., если поверхность дороги под колесами приминается, пока транспортное средство остановлено, существует вероятность того, что высокое ускорение G получается непосредственно после того, как транспортное средство начинает движение. Соответственно, программа управления на фиг. 6 начинается, после того как влияние примятой поверхности дороги устраняется, например, по прошествии приблизительно 2 секунд, после того как педаль акселератора нажимается.
[0077] Транспортное средство продолжает ускоряться даже после того, как определяется в момент времени T3, что транспортное средство находится в состоянии движения по дороге с высокой нагрузкой, и выходная мощность мотор/генератора MG ограничивается Pconst для движения с постоянной скоростью со скоростью V1 движения, когда скорость V транспортного средства достигает V1 в момент времени T5. В это время, для того, чтобы предотвращать обеспечение ощущения дискомфорта водителю вследствие резкого изменения в ускорении G или т.п., изменение целевой выходной мощности tP мотора ограничивается, как описано со ссылкой на фиг. 4, и целевая выходная мощность tP мотора постепенно уменьшается с момента времени T4, в который скорость V транспортного средства достигает V1.
[0078] Целевая выходная мощность tP мотора ограничивается, и увеличивается, чтобы возвращать скорость V транспортного средства к V1, если скорость V транспортного средства начинает уменьшаться вследствие таких факторов как дальнейшее увеличение сопротивления движению в момент времени T6, когда транспортное средство изначально движется со скоростью V1 транспортного средства. Таким образом, скорость V транспортного средства возвращается к V1, и целевая выходная мощность tP мотора возвращается к Pconst в момент времени T8.
[0079] Как описано выше, объединенный контроллер 14 управляет целевой выходной мощностью tP мотора, чтобы достигать скорости V1 транспортного средства, при которой выходная мощность мотор/генератора MG, необходимая для движения с постоянной скоростью, является наименьшей, если транспортное средство определяется как находящееся в состоянии движения по дороге с высокой нагрузкой. Таким образом, как ясно также из фиг. 7, скорость уменьшения величины заряда аккумулятора (SOC) становится более медленной по сравнению со скоростью уменьшения SOC перед моментом времени T5 в течение периода между моментами времени T5 и T6, во время которого целевая выходная мощность tP мотор/генератора MG ограничивается.
[0080] Далее описываются результаты настоящего варианта осуществления.
[0081] В настоящем варианте осуществления объединенный контроллер 14 ограничивает выходную мощность мотор/генератора MG, когда скорость V транспортного средства достигает скорости V1 транспортного средства после определения того, что транспортное средство движется по поверхности дороги с высокой нагрузкой, на которой предварительно определенное ускорение транспортного средства не может быть получено посредством выходной мощности одного лишь двигателя Eng. Поскольку скорость уменьшения величины заряда аккумулятора сдерживается в этом способе, время движения в HEV-режиме или т.п. может быть сделано более продолжительным.
[0082] Посредством ограничения выходной мощности мотор/генератора MG становится невозможно удовлетворять требуемую скорость транспортного средства, определенную из открытия педали акселератора. Однако, в состоянии движения по дороге с высокой нагрузкой, таком как в случае движения по поверхности дороги с высоким сопротивлением движению, например, по песку, величина помощи мотор/генератора MG, необходимая, чтобы удовлетворять требуемой скорости транспортного средства, увеличивается и форсирует уменьшение величины заряда аккумулятора. Соответственно, более длительное время движения в HEV-режиме или т.п. приоретизируется по отношению к удовлетворению требуемой скорости транспортного средства.
[0083] В настоящем варианте осуществления, поскольку объединенный контроллер 14 ограничивает выходную мощность мотор/генератора MG, чтобы поддерживать скорость V1 транспортного средства, величина потребления мощности может быть уменьшена по сравнению со случаем, когда транспортное средство продолжает ускоряться, и расход мощности мотор/генератора MG в HEV-режиме или т.п. может сдерживаться.
[0084] В настоящем варианте осуществления объединенный контроллер 14 увеличивает выходную мощность мотор/генератора MG, чтобы возвращать скорость V транспортного средства к скорости V1 транспортного средства, когда скорость V транспортного средства уменьшается во время управления выходной мощностью мотор/генератора MG. Если сопротивление движению дополнительно увеличивается, и скорость транспортного средства уменьшается во время движения со скоростью V1 транспортного средства, как описано выше, скорость транспортного средства продолжает уменьшаться, и транспортное средство, в конечном счете, останавливается, если выходная мощность мотор/генератора MG сохраняется ограниченной. С другой стороны, если выходная мощность мотор/генератора MG управляется, чтобы поддерживать скорость транспортного средства ниже скорости V1 транспортного средства, выходная мощность мотор/генератора MG, необходимая для движения с постоянной скоростью, увеличивается, как показано на фиг. 5, и форсирует уменьшение величины заряда аккумулятора. Соответственно, посредством увеличения выходной мощности мотор/генератора MG, чтобы возвращать транспортное средство к скорости V1 транспортного средства, продолжающееся уменьшение скорости транспортного средства предотвращается, и уменьшение величины заряда аккумулятора сдерживается.
[0085] В настоящем варианте осуществления объединенный контроллер 14 ограничивает скорость изменения выходной мощности в случае изменения выходной мощности мотор/генератора MG. Таким образом, представляется возможным предотвращать обеспечение ощущения дискомфорта водителю вследствие внезапного изменения в ускорении, изменения в скорости транспортного средства или т.п., когда выходная мощность мотора ограничивается.
[0086] В настоящем варианте осуществления, поскольку объединенный контроллер 14 определяет, согласно открытию APO педали акселератора и ускорению G, находится или нет транспортное средство в состоянии движения по дороге с высокой нагрузкой, то, находится или нет транспортное средство в состоянии движения по дороге с высокой нагрузкой, может быть точно определено.
[0087] В настоящем варианте осуществления скорость V1 транспортного средства, при которой выходная мощность мотор/генератора MG, необходимая для движения с постоянной скоростью в состоянии движения по дороге с высокой нагрузкой, является наименьшей, устанавливается в качестве скорости V транспортного средства, поддерживаемого в состоянии движения по дороге с высокой нагрузкой. Таким образом, время возможного движения может быть сделано более продолжительным посредством сдерживания уменьшения величины заряда аккумулятора в случае движения в HEV-режиме или т.п. в состоянии движения по дороге с высокой нагрузкой.
[0088] Следует отметить, что, хотя целевая выходная мощность tPlim мотора для состояния движения по дороге с высокой нагрузкой вычисляется на основе скорости V транспортного средства в блоке B21 вычисления целевой выходной мощности мотора на фиг. 4, целевая выходная мощность tPlim мотора может также быть вычислена на основе расчетного крутящего момента двигателя или скорости вращения двигателя, как показано на фиг. 8 и 9, вместо скорости V транспортного средства, как описано ниже.
[0089] В настоящем варианте осуществления целью является сделать время непрерывного возможного движения в HEV-режиме или т.п. (далее в данном документе также просто называемое "временем непрерывного возможного движения") более длительным посредством сдерживания уменьшения величины заряда аккумулятора в состоянии движения по дороге с высокой нагрузкой, например, в случае движения по поверхности дороги с высоким сопротивлением движению, на которой предварительно определенное ускорение транспортного средства не может быть получено посредством выходной мощности (крутящего момента) одного лишь двигателя Eng. Соответственно, выходная мощность мотора для движения с постоянной скоростью в состоянии движения по дороге с высокой нагрузкой (т.е., выходная мощность мотора, эквивалентная (сопротивлению движения - крутящий момент двигателя)), вычисляется из крутящего момента двигателя, и, если достаточное время непрерывного возможного движения не может быть обеспечено посредством этой выходной мощности мотора, выходная мощность мотора временно увеличивается, чтобы увеличивать крутящий момент двигателя. Т.е., с помощью мотор/генератора MG, скорость вращения двигателя и скорость транспортного средства увеличиваются, чтобы увеличивать крутящий момент двигателя. После того как крутящий момент двигателя увеличивается, выходная мощность мотора может быть ограничена, чтобы обеспечивать достаточное время непрерывного возможного движения.
[0090] Другими словами, целевая выходная мощность tPlim мотора для состояния движения по дороге с высокой нагрузкой может быть вычислена на основе расчетного крутящего момента двигателя, рассчитанного из открытия APO педали акселератора и скорости вращения двигателя. Дополнительно, целевая выходная мощность tPlim мотора для состояния движения по дороге с высокой нагрузкой может быть вычислена на основе скорости вращения двигателя, используемой для вычисления расчетного крутящего момента двигателя.
[0091] Хотя вариант осуществления настоящего изобретения был описан выше, вышеописанный вариант осуществления является просто иллюстрацией одного примера применения настоящего изобретения и не предназначен, чтобы ограничивать технические рамки настоящего изобретения конкретной конфигурацией вышеописанного варианта осуществления.
Изобретение относится к гибридным транспортным средствам. Устройство управления гибридным транспортным средством с двигателем и электромотором содержит блок определения движения по дороге с высокой нагрузкой и блок настройки выходной мощности мотора. Блок настройки ограничивает выходную мощность электромотора, когда скорость транспортного средства достигает предварительно определенной скорости в случае движения по поверхности дороги с высоким сопротивлением движению. Предотвращается снижение заряда аккумулятора. 4 н. и 5 з.п. ф-лы, 9 ил.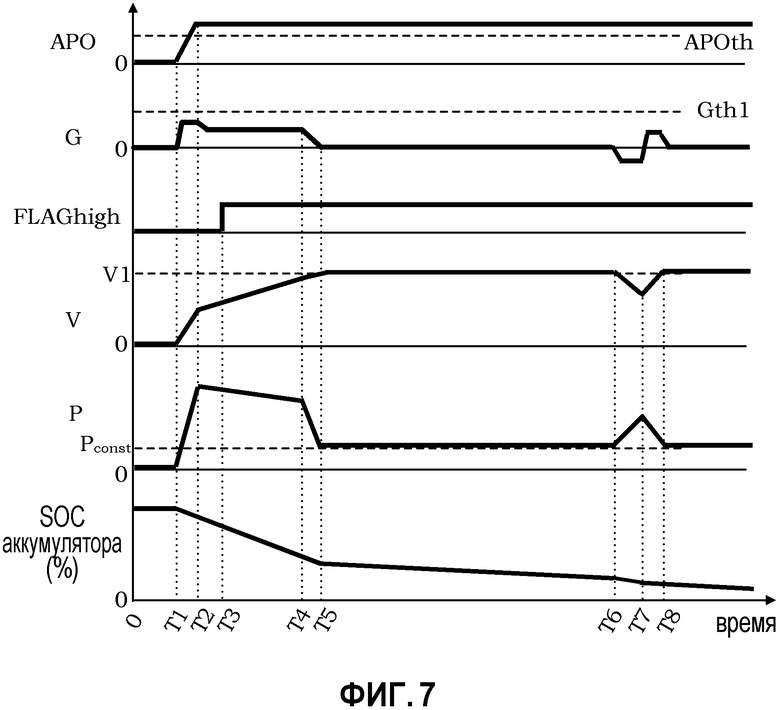
1. Устройство управления гибридным транспортным средством для управления гибридным транспортным средством с двигателем и электромотором в качестве источников приведения в движение транспортного средства, содержащее:
блок определения движения по дороге с высокой нагрузкой, сконфигурированный, чтобы определять, движется или нет транспортное средство по поверхности дороги с высоким сопротивлением движению, предварительно определенное ускорение транспортного средства является недостижимым на поверхности дороги с высоким сопротивлением движению посредством выходной мощности одного лишь двигателя, даже если открытие педали акселератора устанавливается в предварительно определенное значение или большее; и
блок настройки выходной мощности мотора, сконфигурированный, чтобы ограничивать выходную мощность электромотора, когда скорость транспортного средства достигает предварительно определенной скорости транспортного средства в случае движения по поверхности дороги с высоким сопротивлением движению.
2. Устройство управления гибридным транспортным средством для управления гибридным транспортным средством с двигателем и электромотором в качестве источников приведения в движение транспортного средства, содержащее:
блок определения движения по дороге с высокой нагрузкой, сконфигурированный, чтобы определять, движется или нет транспортное средство по поверхности дороги с высоким сопротивлением движению, имеющей сопротивление движению больше крутящего момента при полностью открытой дроссельной заслонке; и
блок настройки выходной мощности мотора, сконфигурированный, чтобы ограничивать выходную мощность электромотора, когда скорость транспортного средства достигает предварительно определенной скорости транспортного средства во время движения по поверхности дороги с высоким сопротивлением движению.
3. Устройство управления гибридным транспортным средством по п. 1 или 2, в котором:
блок настройки выходной мощности мотора ограничивает выходную мощность электромотора, чтобы поддерживать предварительно определенную скорость транспортного средства.
4. Устройство управления гибридным транспортным средством по п. 3, в котором:
блок настройки выходной мощности мотора увеличивает выходную мощность электромотора, чтобы возвращать скорость транспортного средства к предварительно определенной скорости транспортного средства, если скорость транспортного средства уменьшается, в то время как выходная мощность электромотора ограничивается.
5. Устройство управления гибридным транспортным средством по п. 1 или 2, в котором:
блок настройки выходной мощности мотора ограничивает скорость изменения выходной мощности в случае изменения выходной мощности электромотора.
6. Устройство управления гибридным транспортным средством по п. 1 или 2, в котором:
блок определения движения по дороге с высокой нагрузкой определяет, согласно открытию педали акселератора и ускорению, движется или нет транспортное средство по поверхности дороги с высоким сопротивлением движению.
7. Устройство управления гибридным транспортным средством по п. 1 или 2, в котором:
предварительно определенная скорость транспортного средства является скоростью транспортного средства, при которой выходная мощность электромотора, необходимая для движения с постоянной скоростью на поверхности дороги с высоким сопротивлением движению, является наименьшей.
8. Способ управления гибридным транспортным средством для управления гибридным транспортным средством с двигателем и электромотором в качестве источников приведения в движение транспортного средства, содержащий этапы, на которых:
определяют, движется или нет транспортное средство по поверхности дороги с высоким сопротивлением движению, предварительно определенное ускорение транспортного средства является недостижимым на поверхности дороги с высоким сопротивлением движению, даже если открытие педали акселератора устанавливается в предварительно определенное значение или большее; и
ограничивают выходную мощность электромотора, когда скорость транспортного средства достигает предварительно определенной скорости транспортного средства в случае движения по поверхности дороги с высоким сопротивлением движению.
9. Способ управления гибридным транспортным средством для управления гибридным транспортным средством с двигателем и электромотором в качестве источников приведения в движение транспортного средства, содержащий этапы, на которых:
определяют, движется или нет транспортное средство по поверхности дороги с высоким сопротивлением движению, имеющей сопротивление движению больше крутящего момента при полностью открытой дроссельной заслонке; и
ограничивают выходную мощность электромотора, когда скорость транспортного средства достигает предварительно определенной скорости транспортного средства в случае движения по поверхности дороги с высоким сопротивлением движению.
| JP 2008162563 A, 17.07.2008 | |||
| JP 2004175356 A, 24.06.2004 | |||
| JP 2011157038 A, 18.08.2011 | |||
| WO 2013084333 A1, 13.06.2013 | |||
| US 2003088355 A1, 08.05.2003. |

