Предлагаемое изобретение относится к восстановительной медицине и направлено на воспроизведение механических воздействий на отделы позвоночника, которые осуществляет опытный доктор хиропрактик.
В мануальной терапии известны электромеханизмы, которые применяются для механических воздействий на ткани человека. Наиболее распространены вибромассажные устройства. Например: вибрационный аппарат Берсенева, массажер «Тонус», вибрационный аппарат ВМП-1, вибромассажер « Чародей», массажер « Nozomi», вибрационный аппарат Окулова и множество других аппаратов, которые являются и аналогами и прототипами предлагаемому аппарату.
Все перечисленные аппараты лишены возможности определять реакцию тканей на их воздействия. Отсутствие указанной функции у аппаратов не позволяет настроить их на воздействии аналогичные воздействиям опытного врача.
Целью предлагаемого изобретения является измерение реакции тканей человека на воздействие аппарата. В свою очередь эти измерения позволяют аппарату воспроизводить воздействия, которые оказывает опытный доктор.
Указанная цель в ударно-импульсных аппаратах достигается оснащением их интеллектуальными датчиками, регистрирующими амплитуду и частоту упругих колебаний связочно-мышечных тканей, которые возникают в результате такого воздействия и введение регулятора, соединенного с выходами датчиков, осуществляющего регулирование частоты воздействий.
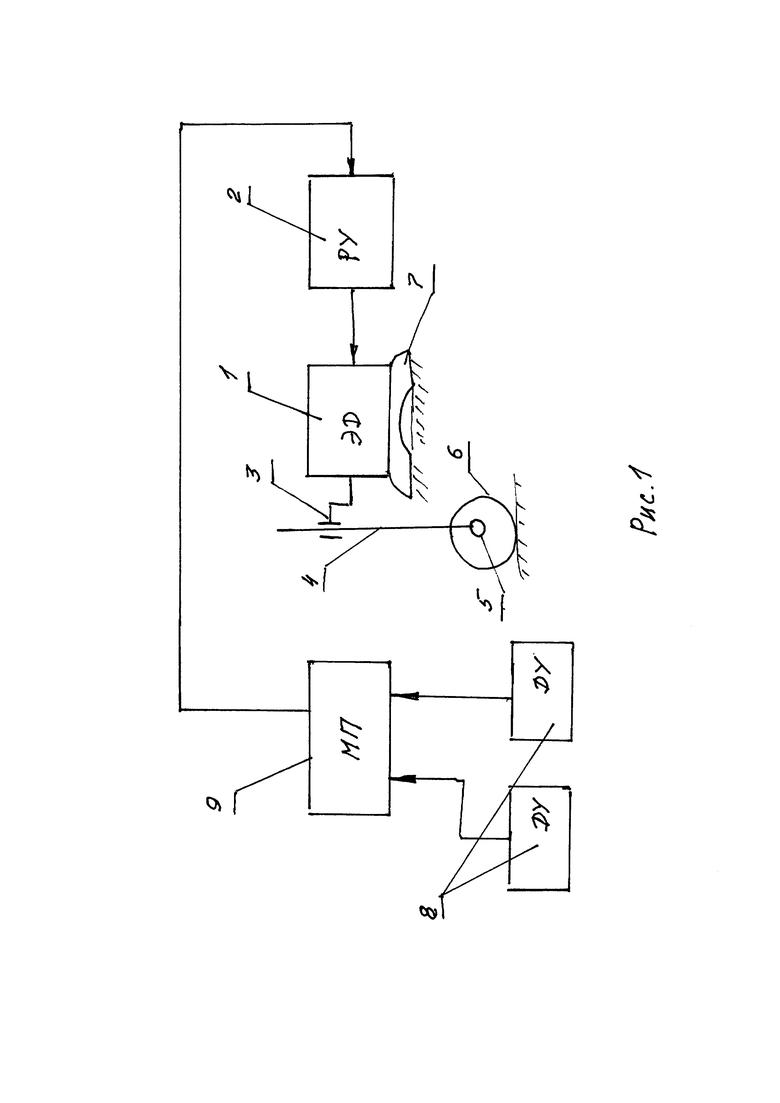
Реализуется указанная цель аппаратом, схема которого приведена на рисунке 1.
Ударно-импульсный аппарат содержит:
- электродвигатель 1 с регулятором частоты воздействий 2,
- на валу двигателя установлен кривошипно-шатунный механизм (КШМ) 3, с регулируемым плечом 4,
- на шатуне КШМ на подшипнике 5 установлено резиновое колесо 6,
- корпус двигателя на теле человека фиксируется вакуумным держателем 7,
- на теле человека крепятся интеллектуальные акселерометры 8, которые фиксируют амплитуду и частоту упругих колебаний связочно-мышечных тканей,
- датчики соединены со входами микропроцессора 9, выходом подключенного к регулятору 2.
Аппарат имеет следующие режимы:
- настройка амплитуды ударных воздействий,
-самонастройка частоты ударных импульсов,
- статический режим или прессура
Настройка амплитуды ударных импульсов осуществляется регулировкой длины плеча КШМ 4. Регулировка плеча осуществляется на основе информации о амплитуде собственных упругих колебаний с датчика, зафиксированной в результате одиночного удара аппаратом. При этом двигатель осуществляет один поворот вала и останавливается надавливая на отдел позвоночника. Это воздействие вызывает упругие колебания в отделе позвоночника с некоторой амплитудой. Эта амплитуда сравнивается с амплитудой, вызванной воздействием, проведенным опытным специалистом. Если амплитуда колебаний, вызванных этим воздействием механизма менее амплитуды, вызванной воздействием специалиста, то плечо увеличивается и при этом увеличивается сила статического воздействия. При этом воздействии фиксируется также частота упругих собственных колебаний тканей. Первичное значение скорости двигателя задается такое, которое соответствует частоте собственных колебаний тканей человека.
При работе механизма у пациента расслабляются мышцы, повышается эластичность мягких тканей. Это приводит к уменьшению жесткости тканей, а следовательно и к уменьшению частоты собственных упругих колебаний их. Чтобы аппарат совершал ударные воздействия с частотами равным собственным, регулятор скорости двигателя соединен с интеллектуальным датчиком, в котором фиксируется частота упругих колебаний. В регуляторе скорости скорость двигателя изменяется в зависимости от частоты собственных колебаний. Аппарат постоянно подстраивается под частоту упругих собственных колебаний тканей.
Тем самым показано, что в предложенном аппарате реализуется ручная регулировка амплитуды задающих ударов и регулировка силы статического воздействия а частота ударов подстраивается под собственные частоты упругих колебаний мягких тканей человека.
Известными элементами в предложенном аппарате являются:
- регулируемый по скорости электропривод
- кривошипно-шатунный механизм.
К отличительным признакам предложенного аппарата следует отнести:
- регулируемое плечо кривошипно-шатунного механизма
- введение интеллектуальных датчиков параметров упругих собственных колебаний мягких тканей.
За счет отличительных признаков, в совокупности с известными, достигается возможность определения реакции тканей на ударные воздействия, достигается самонастройка ударных воздействий аппарата на частоты собственных колебаний. Тем самым аппаратом воспроизводятся воздействия на области тела подобные воздействиям опытного доктора хиропрактика. Дополнительно в аппарате реализуется объективная длительность процедуры, которая заканчивается при достаточно уменьшенной собственной частоте упругих колебаний.
В результате поиска по источникам патентной и научно-технической информации, совокупность признаков, характеризующая предложенный прибор, не была обнаружена. Таким образом, предлагаемое изобретение соответствует критерию охраноспособности «новое». На основании сравнительного анализа предложенного технического решения с известными, можно утверждать, что между совокупностью признаков и выполняемых ими функций и достигаемых целей существует неочевидная причинно-следственная связь. Техническое решение в предложенном тренажере не следует явным образом из уровня техники и следовательно, соответствует критерию охраноспособности «изобретательский уровень.
Изобретение относится к медицинской технике. Аппарат задает механические воздействия на тело человека, в основном в области позвоночника, а также на мышечные ткани, и который содержит регулируемый по скорости электропривод, на валу которого установлен кривошипно-шатунный механизм. Частота воздействий в аппарате самонастраивается на частоты собственных упругих колебаний связочно-мышечных тканей, а амплитуда воздействий регулируется в ручном режиме путем изменения длины плеча кривошипно-шатунного механизма. Самонастройка частоты воздействий аппаратом реализована за счет подключения регулятора скорости электропривода к интеллектуальному датчику, измеряющему частоту собственных упругих колебаний мягких тканей. Аппарат позволяет воспроизвести механические воздействия на области позвоночника и мышечные ткани, оказываемые опытным специалистом. 1 ил.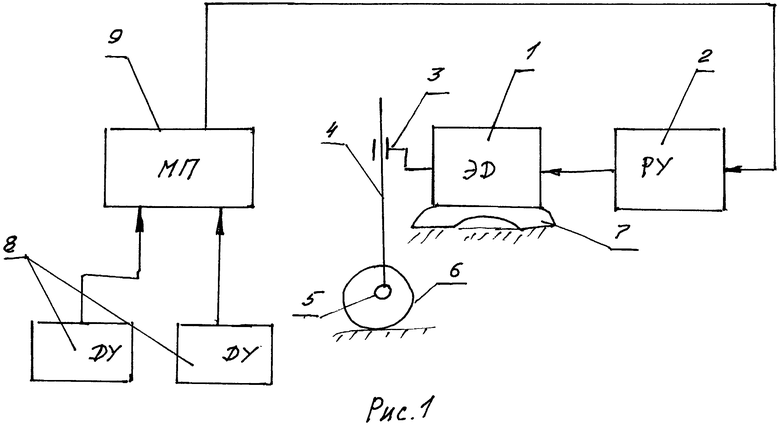
Ударно-импульсный аппарат, содержащий электропривод, регулируемый по скорости, на валу которого установлен кривошипно-шатунный механизм, отличающийся тем, что длина плеча кривошипно-шатунного механизма регулируется, регулятор скорости привода входом соединен с выходом дополнительно введенного интеллектуального датчика частоты упругих собственных колебаний мягких тканей тела человека, при этом интеллектуальный датчик выполнен с возможностью установления на теле человека, причем длина плеча кривошипно-шатунного механизма изменяется так, что амплитуда собственных упругих колебаний тканей, вызванных воздействием аппарата, подобна амплитуде собственных колебаний тканей, являющихся реакцией на воздействие хиропрактика.
| RU 92002176 A, 20.10.1996 | |||
| УСТРОЙСТВО ДЛЯ ВИБРАЦИОННО-МЕХАНИЧЕСКОГО МАССАЖА ПОЗВОНОЧНИКА | 2006 |
|
RU2320165C1 |
| US 5282835 A, 01.02.1994. | |||

