Предлагаемое изобретение относится к восстановительной медицине и предназначено для диагностики постуральных нарушений в позвоночнике, тазобедренном и шейном отделах, в нижних и верхних конечностях; также оно позволяет проводить восстановление нарушенных функций под контролем силовых воздействий и объемов движения в реальном масштабе времени.
Известные хиропрактические столы, например по патентам US 4271830 А и US 81890314 А, используются для придания телу пациента положения такого, при котором хиропрактику удобно проводить лечебные воздействия. Известен также стол по патенту US 5060636 для коррекции искривления позвоночника. Эти столы имеют функции подъема-опускания, оснащены раздельно регулируемыми элементами стола, однако они не оснащены измерительными средствами силы и объемов движения. Поэтому они не могут рассматриваться в качестве прототипа.
Наиболе длизким по технической сути устройством предлагаемому, является стол (или кровать), описанный в патенте №2791143 « Способ диагностики мягкотканого дисбаланса». Устройство, описанное в этом патенте, содержит датчики силы и объема движения, которые выполнены в виде упругой тензометрированной балки, жестко установленные на хиропрактической кровати (столе), которые с отделами пациента соединены с помощью эластичной ленты. Датчики градуируются как по силе так и по удлинению эластичной ленты, что позволяет определять не только силу, но и объем движений в диагностируемых отделах пациента. При этом пациенту предлагается провести собственные движения, например в тазобедренном суставе левом и правом. Разница в показаниях датчика при этом свидетельствует о нарушениях в том отделе, в котором показания силы существенно меньшие. Также хиропрактик, прикладывая внешнюю силу может изменить объем движений растягивая мышцы пациента и при этом контролируя показания силы и объема движений. Особенностью датчика является наличие одного измерительного канала и двух информационных каналов за счет двух, указанных выше градуировок. Это устройство и может быть принято в качестве прототипа. В этом прототипе выходные сигналы датчиков введены в компьютер, в котором программа определяет как силу так и объем движений, информация о объеме связана с удлинением эластичной ленты. Э позволяет получить данные и о перемещению в подвижном отделе и о мышечной силе пациента. Тем самым определяется жесткость в подвижном отделе как соотношение силы и перемещения. Измерение жесткости, например, в тазобедренном отделе левом и правом и сравнение этого параметра позволяет установить постуральное нарушение в отделе, имеющем большую жесткость. Также эти измерения позволяют установить статистической обработкой процесс восстановления в диагностируемых отделах.
Недостатком прототипа являются:
- необходимость иметь большое количество датчиков, чтобы обеспечить диагностику и лечение всех отделов: шейного, тазобедренного, отделов нижних и верхних конечностей. Этот недостаток увеличивает продолжительность процедур, поскольку при переходе от диагностики одного отдела к другому, приходится в программе изменять настройки градуировочных коэффициентов датчиков и изменять положение пациента на столе (на кровати).
Целью предлагаемого предложения является сокращение времени диагностики постуральных отклонений. С этой целью, в известное устройство дополнительно введено трех координатное перемещаемое устройство, имеющее две направляющие вдоль оси X стола, по которым перемещаются взаимно параллельно две каретки. Каретки выполнены в виде куба в котором имеются два взаимно ортогональных отверстия. Через одно отверстие каретки соединяются с направляющей по оси X, через другое отверстие каретки соединяются с направляющими по оси Y. Две направляющие по оси Y соединены между собой направляющими по оси Z так, что образуется рамка. На направляющей оси Z установлена каретка, на которой закреплены три датчика силы так, что они образуют трехосевой датчик силы, который также как и в прототипе соединяется с отделами пациента через эластичный жгут. При этом каретки оснащены фиксаторами.
Общими признаками прототипа и предлагаемого устройства являются:
- наличие стола и датчиков силы, и соединение датчиков с подвижными отделами пациента через эластичный жгут.
К отличительным признакам относится введение трех координатного перемещаемого устройства, содержащего направляющие и три каретки, на одной из которых закреплены три датчика силы так, что они образуют трех осевой датчик силы.
За счет отличительного признака исключается время, необходимое для перестройки программы обработки данных с датчиков и уменьшается число изменений положения пациента на столе. Вместо этого датчики устанавливаются в требуемое положение относительно пациента..
Устройство приведено на кинематической схеме - фигура 1. На фигуре 1 приведены обозначения: 1 - стол, 2 - направляющие X, 3 - каретки XY, 4 - направляющие Y, 5 - каретка Z 6 - три датчика силы, образующие трехосевой датчик силы.
Работа хиропрактика с пациентом начинается с установки датчиков в требуемое положение такое, при котором диагностируемый отдел пациента, например тазобедренный отдел, соединялся с датчиком через эластичный жгут и при этом пациент мог бы произвести требуемые движения. При этом также обеспечивается удобный подход хиропрактика для силового воздействия на этот отдел и для наблюдения за показаниями объема движений и силы.
Применение трех координатника позволяет привести трехосевой датчик силы в любое удобное положение относительно пациента и соединить его подвижный отдел с датчиком силы так, что позволяет пациенту произвести любое требуемое движение. При этом не требуется перестройка программы и не требуется изменение положения пациента на столе. Тем самым сокращается время на проведение диагностики.
Таким образом предлагается хиропрактический стол с трех осевым датчиком силы, содержащий датчики сил, соединенные с исследуемым отделом пациента через эластичный жгут, отличающийся тем, что датчики сил закреплены на перемещаемой по направляющей оси Z каретке, направляющая оси Z закреплена на двух направляющих оси Y так, что они образуют рамку, направляющие Y установлены в отверстиях каретки XY, выполненной в виде куба с взаимно ортогональными отверстиями, вторые отверстия соединяют эту каретку с направляющими по оси X, причем все каретки оснащены фиксаторами.
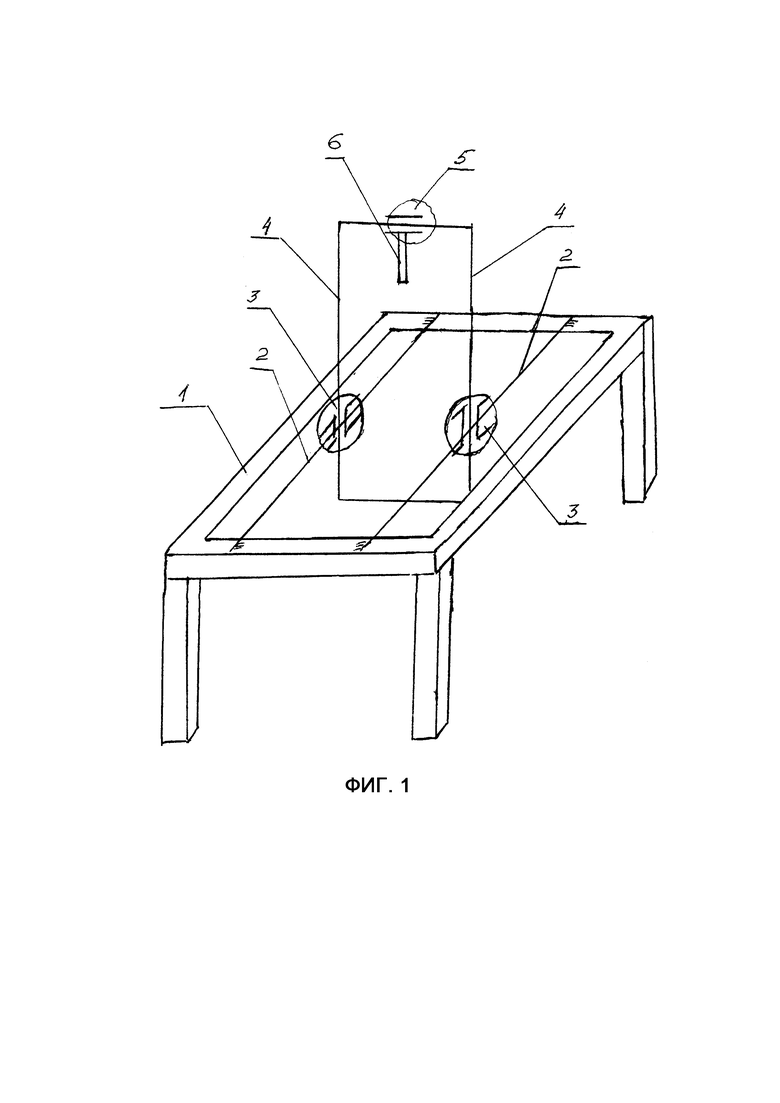
Изобретение относится к медицинской технике, а именно к восстановительной медицине. Хиропрактический стол (1) с перемещаемым трехосевым датчиком силы (6) содержит датчики силы для соединения с исследуемым отделом позвоночника пациента через эластичный жгут. На перемещаемой по направляющей вдоль оси Z стола каретке (5) закреплены три датчика силы так, что они образуют трехосевой датчик силы. Направляющая вдоль оси Z стола закреплена на двух направляющих вдоль оси Y стола так, что они образуют рамку. С двумя направляющими (2) вдоль оси X стола соединены с возможностью взаимно параллельного перемещения две каретки (3), выполненные в виде куба, в котором имеются два взаимно ортогональных отверстия, через одно из которых каретки соединены с направляющими вдоль оси X стола, а через другое - с направляющими (4) вдоль оси Y стола. Все каретки оснащены фиксаторами. Достигается сокращение времени диагностики постуральных отклонений. 1 ил.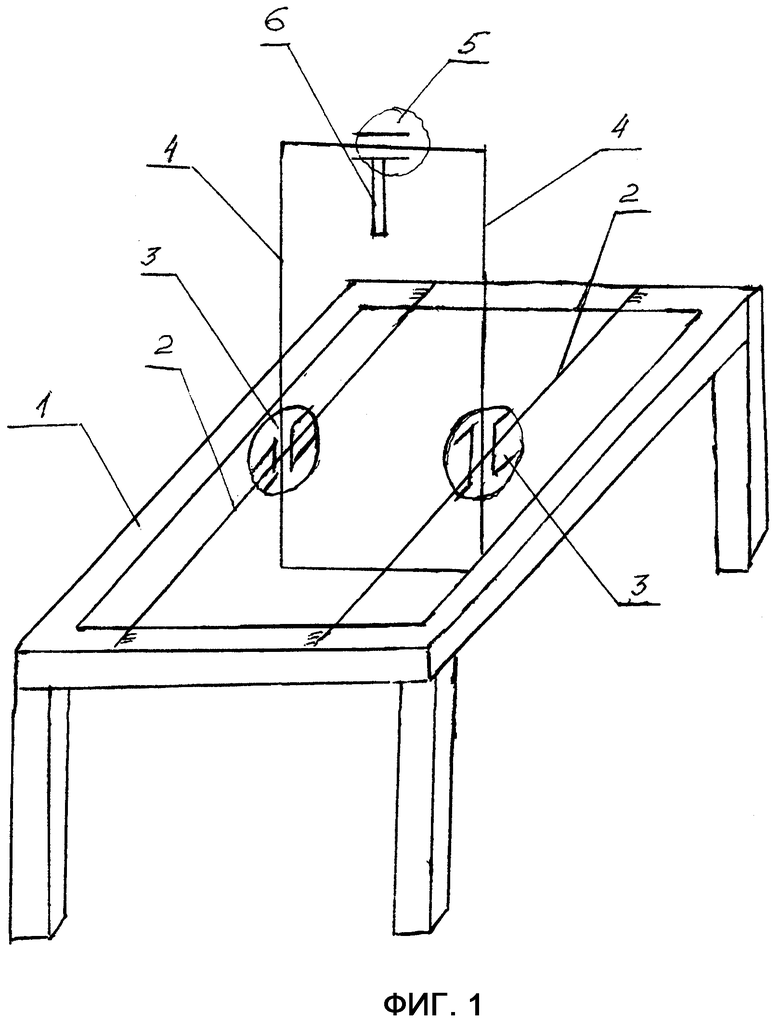
Хиропрактический стол с перемещаемым трехосевым датчиком силы, содержащий датчики силы, выполненные с возможностью соединения с исследуемым отделом позвоночника пациента через эластичный жгут, отличающийся тем, что на перемещаемой по направляющей вдоль оси Z стола каретке закреплены три датчика силы так, что они образуют трехосевой датчик силы, направляющая вдоль оси Z стола закреплена на двух направляющих вдоль оси Y стола так, что они образуют рамку, с двумя направляющими вдоль оси X стола соединены с возможностью взаимно параллельного перемещения две каретки, выполненные в виде куба, в котором имеются два взаимно ортогональных отверстия, через одно из которых каретки соединены с направляющими вдоль оси X стола, а через другое - с направляющими вдоль оси Y стола, причем все каретки оснащены фиксаторами.
| МЕХАНУРГИЧЕСКИЙ СТОЛ ДЛЯ МАССАЖА И МАНУАЛЬНОЙ ТЕРАПИИ | 2009 |
|
RU2391084C1 |
| Тренажер для растяжения соединений костей ног и позвоночника человека | 2020 |
|
RU2773794C1 |
| ИНТУИТИВНАЯ МАССАЖНАЯ СИСТЕМА МАНИПУЛЯТОРНОГО ТИПА (ВАРИАНТЫ) | 2022 |
|
RU2785828C1 |
| СТОЛ ДЛЯ МАНУАЛЬНОЙ ТЕРАПИИ | 2001 |
|
RU2189213C1 |
| US 2012226202 A1, 06.09.2012 | |||
| US 9615986 B2, 11.04.2017 | |||
| JP 2016182330 A, 20.10.2016 | |||
| US 8439948 B1, 14.05.2013 | |||
| US 6638299 B2, 28.10.2003. | |||

