Область техники, к которой относится изобретение
Настоящее изобретение относится к системе обработки воздуха.
Предпосылки создания изобретения
Устройства обработки воздуха позволяют пользователям обрабатывать окружающий их воздух, например, воздух в их домах. Несмотря на то, что устройства обработки воздуха могут быть предусмотрены с датчиками, которые измеряют параметры, относящиеся к качеству воздуха, не все устройства обработки воздуха имеют такие датчики. К тому же, операция восприятия (то есть, что воспринимается) посредством таких датчиков может быть ограничена. По этим причинам, потребители часто покупают отдельные датчики воздуха.
Патент US 5602758 раскрывает устройство для подготовки системы кондиционирования воздуха в помещении для помещений к работе. Устройство и способ преимущественно выполнены с возможностью использования с системой кондиционирования воздуха в помещении, в которой помещения обеспечены входом для кондиционирования воздуха в помещении и датчиком кондиционирования воздуха в помещении, оба из которых функционально соединены с источником кондиционирования воздуха в помещении. Каждое помещение дополнительно обеспечено средством для включения источника кондиционирования воздуха в помещении. Устройство позволяет помещать систему кондиционирования воздуха в помещении в начальное состояние, так что никакое пространство не может принимать и никакой датчик не может сообщать кондиционирование воздуха в помещении. Входы для кондиционирования воздуха в помещении приводятся в действие последовательно и затем функционально соединяются с датчиком кондиционирования воздуха в помещении, который сообщает об изменении состояния кондиционируемого воздуха.
Краткое изложение сущности изобретения
Объектом изобретения является разработка системы обработки воздуха, которая улучшает управление устройством обработки воздуха. Изобретение определено в независимых пунктах формулы изобретения. В зависимых пунктах формулы изобретения определены преимущественные варианты осуществления.
Согласно аспекту настоящего изобретения, разработана система обработки воздуха, содержащая: воздухоочиститель, выполненный с возможностью фильтрации окружающей воздушной среды для обработки первого параметра упомянутой воздушной среды; регулятор, выполненный с возможностью управления работой воздухоочистителя; и первый датчик, выполненный с возможностью определения величины, характеризующей первый параметр, и передачи данных датчика, характеризующих величину, регулятору; причем регулятор выполнен с возможностью определения, находятся ли первый датчик и воздухоочиститель в одном и том же пространстве воздушной среды, посредством управления воздухоочистителем с обеспечением его работы в первом режиме работы и выполнения анализа данных датчика от первого датчика, полученных во время первого режима работы; причем если первый датчик и воздухоочиститель определены как находящиеся в одном и том же пространстве воздушной среды, регулятор выполнен с возможностью управления воздухоочистителем с обеспечением его работы во втором режиме работы на основании данных датчика от первого датчика.
Следовательно, регулятор может управлять воздухоочистителем с обеспечением его работы на основании данных датчика от первого датчика, если первый датчик и воздухоочиститель находятся в одном и том же пространстве воздушной среды (например, в одной и той же комнате). Осуществление этого изобретения может привести к улучшению впечатлений пользователя и более умной работе воздухоочистителей. Если воздухоочиститель не знает, находится ли датчик в том же воздушном пространстве, что и воздухоочиститель, возникает следующая проблема. Датчик может находится в другой комнате, в которой открыто окно. Следовательно, воздухоочиститель может получать информацию о том, что параметр x (например, концентрация частиц) превышает пороговую величину t, даже по прошествии длительного времени после достижения t. Следовательно, информация о совместном расположении датчика и воздухоочистителя позволяет достичь улучшенного управления воздухоочистителем.
В соответствие с изобретением, если первый датчик и воздухоочиститель определены как не находящиеся в одном и том же пространстве воздушной среды, регулятор выполнен с возможностью управления воздухоочистителем с обеспечением его работы в третьем режиме работы, который не зависит от данных датчика от первого датчика. Следовательно, управление воздухоочистителем не происходит на основании данных датчика, если первый датчик не находится в одном и том же пространстве воздушной среды, что и воздухоочиститель. К тому же, третий режим работы не должен быть обязательно единственным режимом работы, и в некоторых вариантах осуществления может представлять собой режим работы, который не основан на данных датчика.
Первый режим работы (например, режим диагностики) не должен быть обязательно специальным режимом работы воздухоочистителя, и просто может представлять собой заданный режим работы воздухоочистителя. К тому же, второй режим работы не должен быть обязательно единственным режимом работы и в некоторых вариантах осуществления может представлять собой режим работы, основанный на данных датчика.
В некоторых вариантах осуществления, фактическая работа воздухоочистителя может быть одинаковой в первом режиме работы и во втором режиме работы. Например, если воздухоочиститель представляет собой очиститель с вентилятором, скорость вентилятора может быть одинаковой в первом режиме работы и во втором режиме работы, при изменении (например) периода работы во втором режиме работы на основании данных датчика.
Воздухоочиститель выполнен с возможностью фильтрации окружающей воздушной среды. Термин 'фильтрация' следует понимать в широком смысле как обозначающий любую форму обработки окружающей воздушной среды для удаления одного или более составляющих, компонентов или элементов содержимого или воздуха. Это могут быть, например, химические вещества или твердые частицы, содержащиеся в воздухе или составляющие воздух. Дополнительно или в качестве альтернативы они могут представлять собой текучие составляющие, такие как вода. Например, воздухоочиститель может представлять собой осушитель, выполненный с возможностью удаления воды из окружающей воздушной среды. В любом из этих примеров, воздухоочиститель может иметь вход воздуха для принятия или всасывания обрабатываемого или фильтруемого воздуха из окружающей среды, и выход воздуха для выпускания отфильтрованного или обработанного воздуха обратно в окружающую воздушную среду.
Варианты осуществления изобретения позволяют определять, находится ли датчик в одном и том же пространстве воздушной среды, что и воздухоочиститель. Фразу 'в одном и том же пространстве воздушной среды' можно понимать как нахождение, по существу, в той же массе воздуха, в которой находится воздухоочиститель и которую воздухоочиститель фильтрует или обрабатывает. Это может означать, например, что воздухоочиститель и датчик находятся в одной и той же комнате. Дополнительно или в качестве альтернативы, это может означать, что воздухоочиститель и датчик расположены так, что между ними существует свободный поток воздуха. Под 'свободным потоком воздуха' следует понимать естественный (например, самостоятельный) свободный поток воздуха, который существует в отсутствие, например, устройства, канализирующего или направляющего воздух. Воздухоочиститель и датчик могут быть, например, расположены в одной и той же открытой массе воздуха. Они оба могут быть расположены в одном и том же пространстве и соединены по текучей среде посредством открытой массы воздуха, без какого-либо специального конструктивного средства для обеспечения упомянутого соединения по текучей среде.
В некоторых вариантах осуществления, в первом режиме работы, регулятор выполнен с возможностью управления воздухоочистителем с обеспечением его работы заданным образом; причем регулятор выполнен с возможностью хранения данных, относящихся к ожидаемому изменению первого параметра, причем ожидаемое изменение характеризует изменение первого параметра, обнаружение которого посредством первого датчика ожидается, когда воздухоочиститель приводится в действие заданным образом с первым датчиком, находящимся в том же пространстве воздушной среды, что и воздухоочиститель; причем регулятор выполнен с возможностью определения, находятся ли первый датчик и воздухоочиститель в одном и том же пространстве воздушной среды посредством определения, соответствуют ли данные датчика, полученные во время первого режима работы, ожидаемому изменению первого параметра.
Ожидаемое изменение может представлять собой изменение первого параметра по сравнению с исходной величиной первого параметра. В некоторых вариантах осуществления, регулятор выполнен с возможностью определения исходной величины первого параметра с использованием данных от первого датчика перед определением, находится ли воздухоочиститель в одном и том же пространстве воздушной среды, что и первый датчик.
Следовательно, в таких вариантах осуществления, регулятор может определять, находятся ли воздухоочиститель и первый датчик в одной и той же комнате, посредством сравнения ожидаемых величин датчика (или ожидаемых изменений первого параметра) с полученными величинами датчика (или полученными изменениями первого параметра).
В некоторых вариантах осуществления, во втором режиме работы регулятор выполнен с возможностью управления воздухоочистителем с обеспечением его работы в режиме высокой мощности до тех пор, пока данные датчика от первого датчика не обозначат, что первый параметр прошел целевую величину; причем после прохождения первым параметром целевой величины, регулятор выполнен с возможностью управления воздухоочистителем с обеспечением его работы в режиме работы с пониженным энергопотреблением. В некоторых вариантах осуществления, целевая величина представляет собой изменение первого параметра по сравнению с исходной величиной первого параметра.
В некоторых вариантах осуществления, регулятор выполнен с возможностью определения, находятся ли первый датчик и воздухоочиститель в одном и том же пространстве воздушной среды, когда регулятор приведен в действие. Приведение в действие может содержать включение регулятора или запуск программы или приложения.
В некоторых вариантах осуществления, после определения регулятором, находятся ли первый датчик и воздухоочиститель в одном и том же пространстве воздушной среды, регулятор выполнен с возможностью ожидания в течение заданного времени перед новым определением, находятся ли первый датчик и воздухоочиститель в одном и том же пространстве воздушной среды.
В некоторых вариантах осуществления, первый датчик и воздухоочиститель находятся в беспроводном сообщении с регулятором.
В некоторых вариантах осуществления, первый датчик и воздухоочиститель находятся в беспроводном сообщении с точкой доступа, и регулятор соединен с точкой доступа через сеть.
В некоторых вариантах осуществления, регулятор выполнен с возможностью хранения информации о возможностях воздухоочистителя и первого датчика.
В соответствии с одним или несколькими вариантами осуществления, воздухоочиститель и/или первый датчик могут быть выполнены с возможностью перемещения относительно друг друга. Например, воздухоочиститель и первый датчик, как оба, так и один из них, могут быть портативными. Например, воздухоочиститель и/или первый датчик могут быть самостоятельными устройствами, каждое из которых выполнено с возможностью обеспечения легкого изменения положения или перемещения либо в одном и том же воздушном пространстве, либо между разными воздушными пространствами, или разными пространствами или комнатами. Благодаря этому обеспечиваются значительная гибкость и адаптивность в отношении относительных расположений очистителей и датчиков и в отношении конкретного функционирования, обеспечиваемого системой обработки воздуха в заданном пространстве или множестве пространств. Поскольку регулятор выполнен с возможностью обеспечения определения, находятся ли очиститель и датчик в одном и том же воздушном пространстве, эта адаптивность может быть обеспечена без ухудшения эффективности или действенности обработки воздуха, которую обеспечивает система.
Согласно некоторым примерам, воздухоочиститель и первый датчик могут образовывать часть сети подвижных или портативных соединенных устройств. Устройства могут быть выполнены с возможностью обеспечения быстрой переустановки или перераспределения устройств в разных пространствах или комнатах, или между ними (в том числе, например, в разных пространствах воздушной среды или между ними). Благодаря этому может быть предусмотрена очень адаптивная и гибкая система обработки воздуха. Способность определения, находятся ли очиститель и датчик системы в одном и том же воздушном пространстве, обеспечивает достижение этой гибкости без риска повреждения или ухудшения эффективного управления каждым из очистителей. Если датчик и очиститель удаляются друг от друга в ходе реконфигурации системы, система обеспечивает средство определения возникновения такого отделения и должного изменения режима управления соответствующим очистителем.
В некоторых вариантах осуществления, система обработки воздуха дополнительно содержит второй датчик, выполненный с возможностью определения величины, характеризующей второй параметр, и передачи данных датчика, характеризующих величину, регулятору; причем регулятор выполнен с возможностью определения, находятся ли второй датчик и воздухоочиститель в одном и том же пространстве воздушной среды, посредством управления воздухоочистителем с обеспечением его работы в четвертом режиме работы (например, второй режим диагностики) и выполнения анализа данных датчика от датчика, полученных во время четвертого режима работы; причем если второй датчик и воздухоочиститель определены как находящиеся в одном и том же пространстве воздушной среды, регулятор выполнен с возможностью управления воздухоочистителем с обеспечением его работы на основании данных датчика от второго датчика.
В некоторых вариантах осуществления, четвертый режим работы представляет собой такой же режим работы, приводимый в действие в то же время, что и первый режим работы.
В некоторых вариантах осуществления, система обработки воздуха дополнительно содержит второй воздухоочиститель, выполненный с возможностью фильтрации окружающей воздушной среды для обработки первого параметра упомянутой воздушной среды; причем регулятор выполнен с возможностью определения, находятся ли первый датчик и второй воздухоочиститель в одном и том же пространстве воздушной среды, посредством управления вторым воздухоочистителем с обеспечением его работы в первом режиме работы и выполнения анализа данных датчика от первого датчика, полученных во время первого режима работы; причем если первый датчик и второй воздухоочиститель определены как находящиеся в одном и том же пространстве воздушной среды, регулятор выполнен с возможностью управления вторым воздухоочистителем с обеспечением его работы на основании данных датчика от первого датчика.
Согласно другому аспекту изобретения, разработан регулятор для системы обработки воздуха, которая описана выше.
Регулятор согласно вариантам осуществления изобретения может представлять собой соответствующее устройство или может быть программой или приложением, выполняемым на устройстве общего назначения, таком как компьютер, смартфон или другое мобильное устройство.
Согласно другому аспекту изобретения, разработан способ управления системой обработки воздуха, которая описана выше.
Согласно другому аспекту изобретения, разработан машиночитаемый носитель, несущий машиночитаемый код для управления регулятором для выполнения описанного выше способа.
Преимущественные варианты осуществления регулятора, способа и носителя согласно изобретению образованы посредством упомянутых выше вариантов осуществления системы согласно изобретению. Эти и другие аспекты изобретения разъяснены в приведенном далее описании вариантов осуществления.
Краткое описание чертежей
Далее в качестве примера описаны варианты осуществления изобретения со ссылкой на прилагаемые чертежи, в которых:
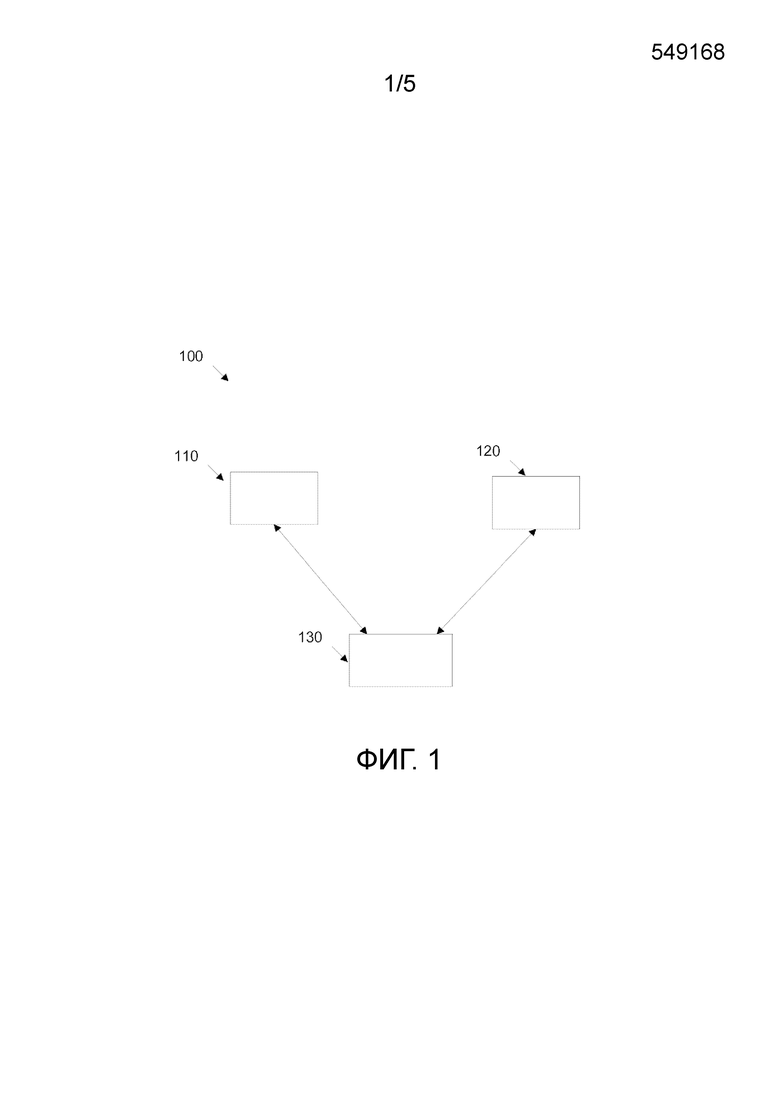
На Фиг. 1 схематично показана система обработки воздуха согласно первому варианту осуществления изобретения;
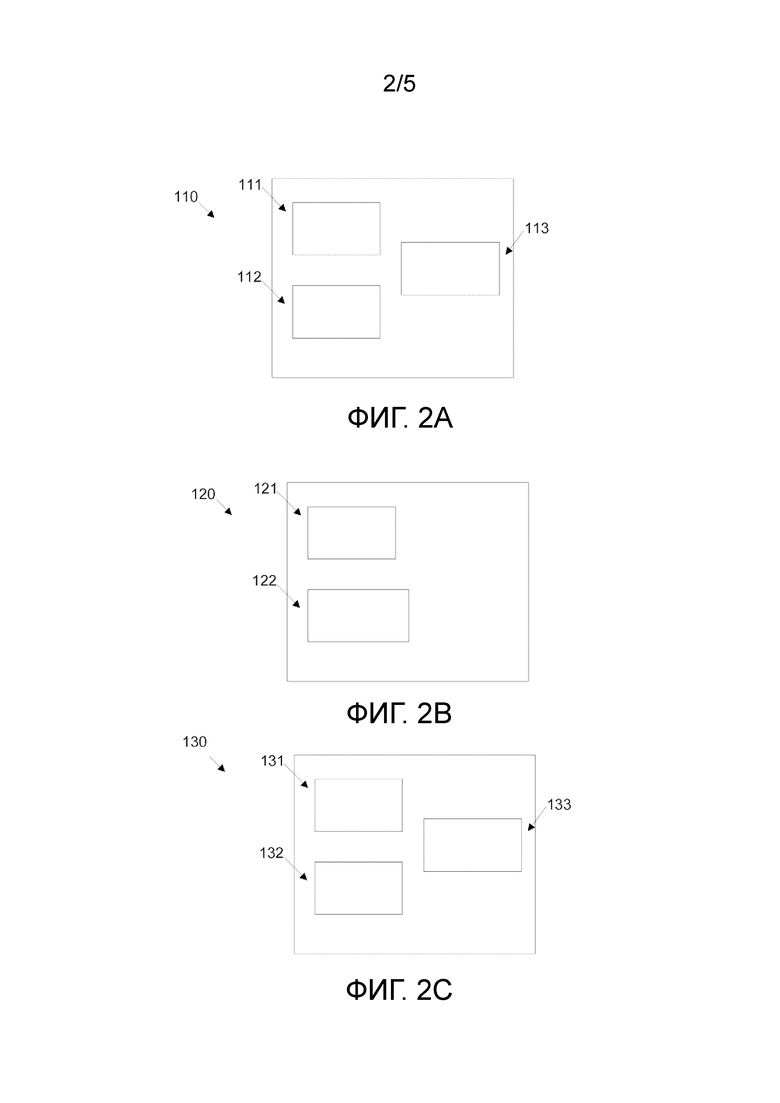
На Фиг. 2a, 2b и 2c более подробно схематично показаны элементы системы обработки воздуха согласно первому варианту осуществления изобретения;
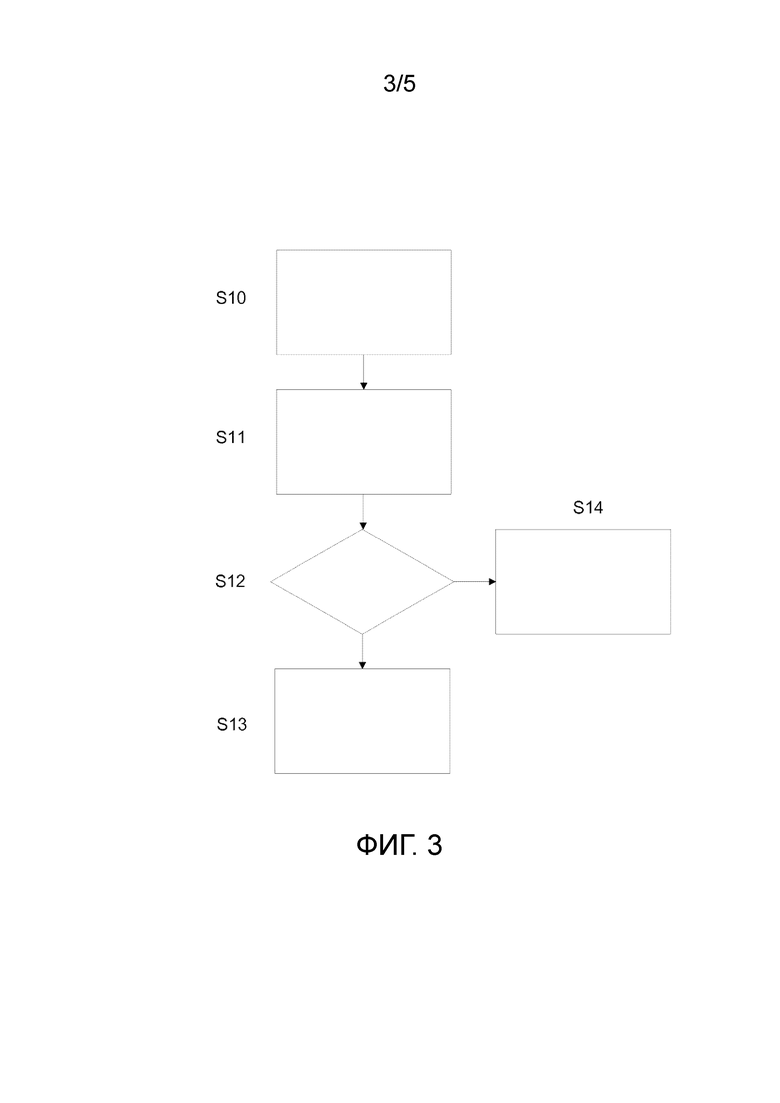
На Фиг. 3 показана блок-схема, объясняющая работу системы согласно первому варианту осуществления;
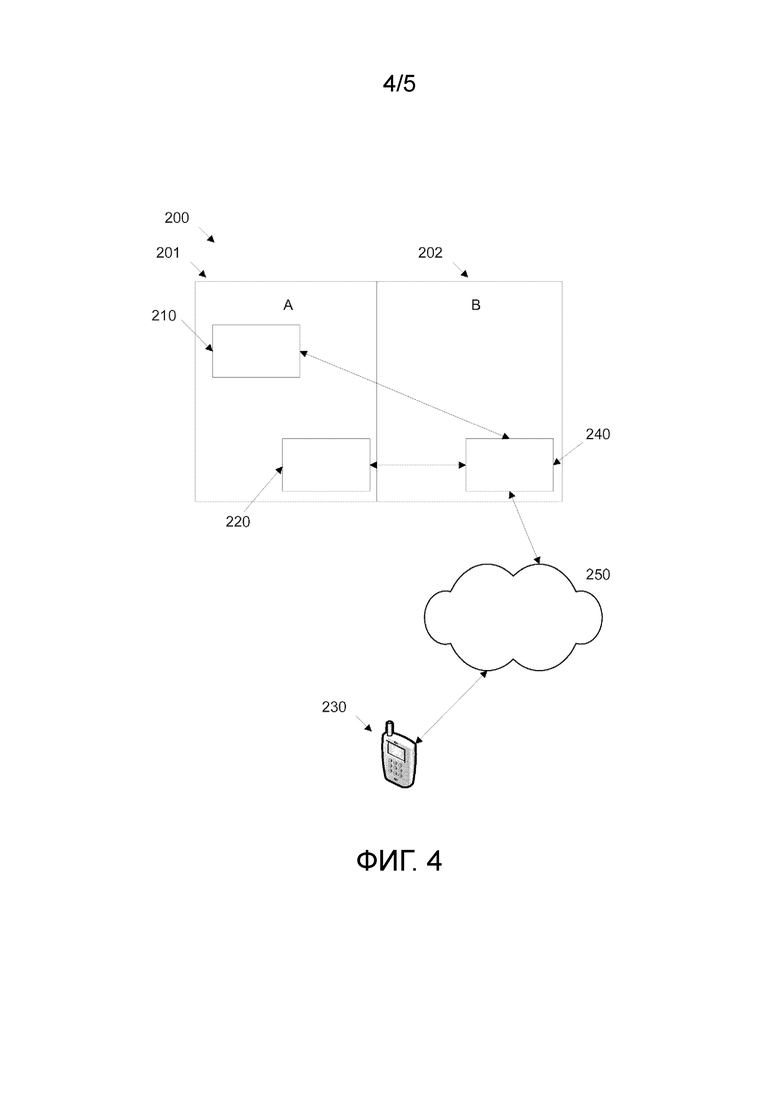
На Фиг. 4 показана система обработки воздуха согласно второму варианту осуществления изобретения; и
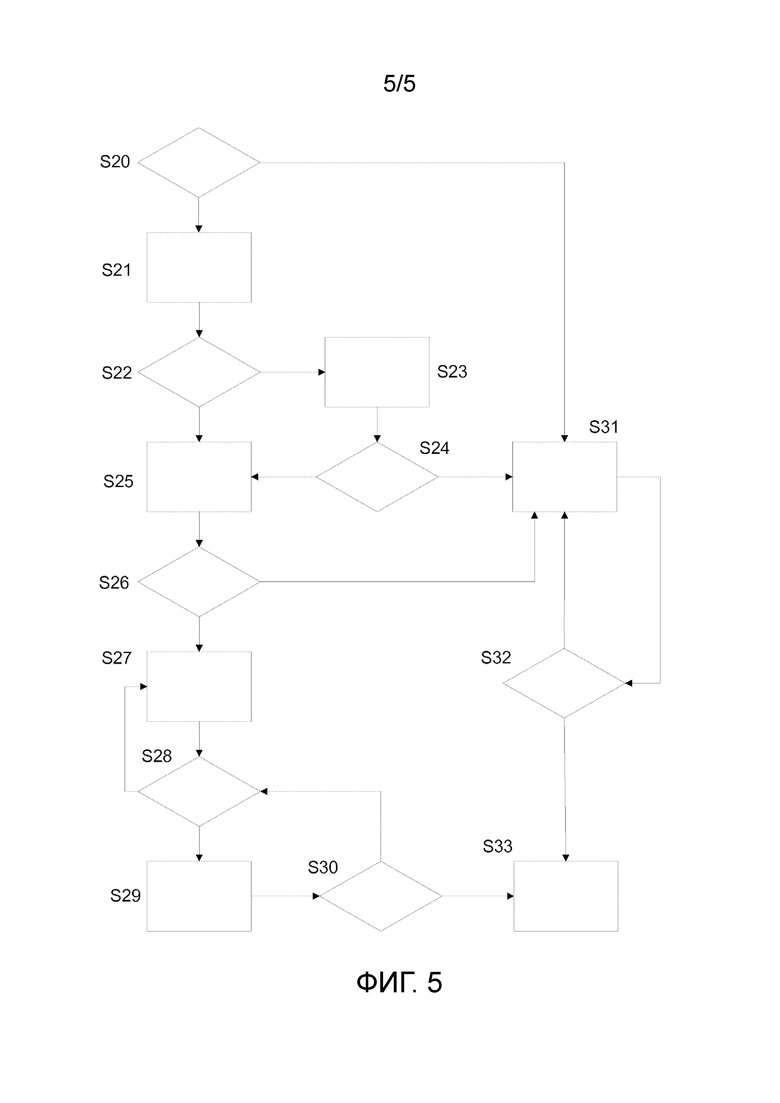
На Фиг. 5 показана блок-схема, объясняющая работу системы согласно второму варианту осуществления.
Подробное описание вариантов осуществления настоящего изобретения
На Фиг. 1 схематично показана система обработки воздуха согласно первому варианту осуществления изобретения. Система 100 содержит воздухоочиститель 110, датчик 120 и регулятор 130.
Воздухоочиститель 110 выполнен с возможностью обработки первого параметра воздушной среды. В этом варианте осуществления, воздухоочиститель 110 представляет собой воздухоочиститель, который выполнен с возможностью отфильтровывания твердых частиц из воздуха. В этом варианте осуществления, воздухоочиститель 110 содержит вентилятор 111 и фильтр 112, как видно на Фиг. 2a. Следовательно, в этом варианте осуществления, первый параметр относится к концентрации частиц. В этом варианте осуществления, воздухоочиститель 110 также содержит механизм 113 обмена данными для обмена данными с регулятором 130.
Датчик 120 выполнен с возможностью определения величины, характеризующей первый параметр. В этом варианте осуществления, датчик 120 представляет собой датчик частиц, который может определять концентрацию частиц в воздухе (например, с использованием средства оптического восприятия). Датчик 120 выполнен с возможностью передачи данных датчика, характеризующих величину, регулятору 130. В этом варианте осуществления, датчик 120 воздуха содержит датчик 121 частиц и механизм 122 обмена данными для обмена данными с регулятором 130, как видно на Фиг. 2b.
Регулятор 130 выполнен с возможностью управления работой воздухоочистителя 110. Как описано ниже, регулятор 130 выполнен с возможностью определения, находятся ли датчик 120 и воздухоочиститель 110 в одном и том же воздушном пространстве. Если датчик 120 и воздухоочиститель 110 определены как находящиеся в одном и том же воздушном пространстве, регулятор 130 выполнен с возможностью управления воздухоочистителем с обеспечением его работы в режиме работы на основании данных датчика от датчика 120.
В этом варианте осуществления, регулятор 130 содержит управляющий механизм 131, запоминающее устройство 132 и механизм 133 обмена данными для обмена данными с датчиком 120 и воздухоочистителем 110, как видно на Фиг. 2c.
В этом варианте осуществления, регулятор 130 хранит информацию, относящуюся к воздухоочистителю 110 и датчику 120, в запоминающем устройстве 132. В частности, регулятор 130 хранит информацию о типе воздухоочистителя 110 и типе датчика 120. Например, в этом варианте осуществления, регулятор 130 хранит информацию о том, что воздухоочиститель 110 представляет собой воздухоочиститель для отфильтровывания твердых частиц из воздуха, и что датчик 120 представляет собой датчик частиц.
Работа первого варианта осуществления описана со ссылкой на Фиг. 3.
На этапе S10 (управление воздухоочистителем с обеспечением его работы в режиме диагностики), регулятор 130 управляет воздухоочистителем 110 с обеспечением его работы в первом режиме работы (например, в режиме диагностики). В этом варианте осуществления, первый режим работы относится к заданной работе вентилятора воздухоочистителя 110. Например, исключительно в качестве иллюстративного примера, вентилятор воздухоочистителя 110 может быть выполнен с возможностью работы с малой скоростью, средней скоростью или большой скоростью. Первый режим работы может соответствовать работе вентилятора воздухоочистителя 110 в течение заданного времени (например, 5 минут).
На этапе S11 (получение данных датчика от датчика), датчик 120 собирает данные датчика, относящиеся к концентрации частиц, и передает эти данные регулятору 130 с использованием механизма 122 обмена данными.
На этапе S12 (в одном и том же воздушном пространстве?), регулятор 130 определяет, находятся ли датчик 120 и воздухоочиститель 110 в одном и том же воздушном пространстве (например, в одной и той же комнате), посредством выполнения анализа данных датчика от датчика 120, полученных во время первого режима работы.
В этом варианте осуществления, регулятор 130 выполнен с возможностью хранения данных, относящихся к ожидаемому изменению первого параметра (в этом примере, концентрация частиц) во время первого режима работы, в запоминающем устройстве 132.
В этом варианте осуществления, ожидаемое изменение характеризует изменение первого параметра, которое является ожидаемым, когда воздухоочиститель 110 работает в первом режиме работы (в этом примере, средняя скорость вентилятора), причем датчик 120 находится в одном и том же воздушном пространстве, что и воздухоочиститель 110. Иначе говоря, когда вентилятор воздухоочистителя 110 работает со средней скоростью и когда датчик 120 находится в одной и той же комнате, что и воздухоочиститель 110, ожидается определение датчиком 120 падения концентрации частиц. Следовательно, ожидаемое изменение в этом варианте осуществления может относиться к падению концентрации частиц ниже пороговой величины. Пороговая величина может быть определена относительно исходной концентрации частиц. Иначе говоря, пороговая величина может относиться к падению относительно исходной концентрации частиц.
Управляющий механизм 131 регулятора 130 выполнен с возможностью определения, находятся ли датчик 120 и воздухоочиститель 110 в одном и том же воздушном пространстве, посредством определения, соответствуют ли данные датчика, полученные во время первого режима работы, ожидаемому изменению первого параметра. Следовательно, в этом варианте осуществления, регулятор 130 сравнивает полученные данные датчика во время первого режима работы.
Если полученные данные датчика соответствуют ожидаемому изменению (например, концентрация падает ниже пороговой величины), то регулятор 130 определяет, что датчик 120 и воздухоочиститель 110 находятся в одном и том же воздушном пространстве. Тогда регулятор 130 выполнен с возможностью (смотри S13 - работа воздухоочистителя в режиме работы, зависимом от данных датчика от датчика) управления воздухоочистителем 110 с обеспечением его работы в режиме работы, который зависит от данных датчика от датчика (например, второй режим работы). Регулятор 130 может обеспечивать это посредством передачи воздухоочистителю 110 соответствующих управляющих команд через управляющий механизм 131. Управляющие команды могут быть определены управляющим механизмом 131 с использованием информации, хранящейся в запоминающем устройстве 132.
Если полученные данные датчика не соответствуют ожидаемому изменению (например, если концентрация частиц не падает ниже пороговой величины), то регулятор 130 определяет, что датчик 120 и воздухоочиститель 110 не находятся в одном и том же воздушном пространстве. Тогда регулятор 130 выполнен с возможностью (смотри S14 - работа воздухоочистителя в режиме работы, который не зависит от данных датчика от датчика) управления воздухоочистителем с обеспечением его работы в режиме работы, который не зависит от данных датчика от датчика 120 (например, третий режим работы).
Если определено, что датчик 120 и воздухоочиститель 110 не находятся в одном и том же воздушном пространстве, то данные датчика от датчика 120 не могут быть использованы в качестве данных для управления воздухоочистителем 110. В этом случае, регулятор 130 может управлять воздухоочистителем 110 с обеспечением его работы в режиме работы со средней скоростью либо все время, либо включая воздухоочиститель 110 через определенные периоды времени.
Если определено, что датчик 120 и воздухоочиститель 110 находятся в одном и том же воздушном пространстве, то регулятор 130 может управлять воздухоочистителем 110 с использованием данных датчика от датчика 120. Например, в таком случае, регулятор 130 может управлять воздухоочистителем 110 с обеспечением его работы в режиме работы с большой скоростью для уменьшения концентрации частиц ниже пороговой величины (например, до заданного падения относительно исходной величины) за короткий промежуток времени. Затем, при достижении пороговой величины концентрации частиц, регулятор 130 может управлять воздухоочистителем 110 с обеспечением его работы в режиме работы с малой скоростью либо все время, либо включая воздухоочиститель 110 через определенные периоды времени. Режим работы с малой скоростью может поддерживать требуемую концентрацию частиц.
Следовательно, на основании данных датчика, если определено, что датчик 120 и воздухоочиститель 110 находятся в одном и том же воздушном пространстве, концентрация частиц может быть быстро уменьшена и затем сохранена посредством режима работы с малой скоростью. Благодаря этому обеспечивается быстрое (или относительно быстрое) уменьшение концентрации частиц, после которого следует длительная работа в режиме работы с малой скоростью (который является менее шумным и использует меньше энергии). Благодаря этому обеспечивается эффективная работа воздухоочистителя 110. Если определено, что датчик 120 и воздухоочиститель 110 не находятся в одном и том же воздушном пространстве, то регулятор 130 не зависит от данных датчика от датчика 120.
В этом варианте осуществления, регулятор 130 выполнен с возможностью определения, находятся ли датчик 120 и воздухоочиститель 110 в одном и том же воздушном пространстве, когда регулятор приведен в действие. Например, это может происходить, когда регулятор 130 включен.
В некоторых вариантах осуществления, после того, как регулятор 130 определяет, находятся ли датчик 120 и воздухоочиститель 110 в одном и том же воздушном пространстве, регулятор 130 ждет в течение заданного времени перед новым определением, находятся ли датчик 120 и воздухоочиститель 110 в одном и том же воздушном пространстве. Посредством этого, регулятор 130 может периодически проверять, переместился ли датчик 120 в воздушное пространство воздухоочистителя 110 или из него.
В этом варианте осуществления, датчик 120 и воздухоочиститель 110 находятся в беспроводном сообщении с регулятором 130. Иначе говоря, в этом варианте осуществления, все механизмы обмена данными датчика 120, воздухоочистителя 110 и регулятора 130 осуществляют беспроводной обмен данными. Тем не менее, в других вариантах осуществления, могут быть использованы другие способы соединения. Например, регулятор 130 может быть соединен с воздухоочистителем 110 и датчиком 120 через Интернет или другую подходящую сеть.
Соединенные воздухоочистители обеспечивают дистанционное управление (например, через Интернет) очистителем, в результате чего пользователь может включать воздухоочиститель до прибытия домой. Благодаря такой сетевой среде, регулятор 130 (который может быть осуществлен, например, как приложение на мобильном телефоне или на одном из устройств или удаленно через Интернет) может автоматически или через ввод пользователя управлять соединенными устройствами для обеспечения требуемого качества воздуха. Это управление может быть основано на показаниях датчика.
Возникает проблема, связанная с тем, что воздухоочиститель 110 и датчик 120 не являются неподвижными, в результате чего система должна знать их относительные положения, например, находится ли датчик 120 в том же пространстве, что и конкретный очиститель. В этом контексте, это относится не только к относительному расстоянию между двумя устройствами, но и к тому, находятся ли они в одном пространстве, то есть, может ли происходить свободный воздухообмен между двумя устройствами.
Информация о совместном расположении датчика и воздухоочистителя является особенно важной для использования данных датчика в качестве основания для управления режимами работы воздухоочистителя 110.
Например, система включается и работает в режиме A работы, пока параметр x (например, концентрация частиц PM2.5 (размером менее 2,5 мкм)) не падает ниже пороговой величины t, которая в этом примере является требуемой целевой величиной. Теперь требуется, чтобы этот параметр больше не изменялся и чтобы он поддерживался (например, для исключения нежелательного потребления энергии). Следовательно, приводится в действие режим B работы (например, работа с очень низкой производительностью по сравнению с режимом A работы), достаточный для компенсации противодействующей силы (например, твердых частиц, проникающих снаружи).
Если воздухоочиститель 110 не знает, находится ли датчик 120 в одном и том же воздушном пространстве, что и воздухоочистители, возникает следующая проблема. Датчик 120 может находиться в другой комнате, в которой открыто окно. Следовательно, в таком случае, воздухоочиститель всегда получает информацию о том, что параметр x (например, концентрация частиц) превышает пороговую величину t, даже в течение длительного времени после достижения пороговой величины t. Следовательно, управление воздухоочистителем 110 улучшается благодаря информации о совместном расположении датчика 120 и воздухоочистителя 110. В результате этого, варианты осуществления изобретения могут улучшить эффективность воздухоочистителя с помощью соответствующего управления на основании данных датчика.
Варианты осуществления изобретения могут работать более чем с одним воздухоочистителем и более чем с одним датчиком. Датчик (датчики) может быть использован для измерения эффекта воздухоочистителя (воздухоочистителей) (например, очистителя, увлажнителя (осушителя)) и, таким образом, для определения, находится ли датчик (датчики) (отдельные или объединенные) в одном и том же воздушном пространстве с воздухоочистителем (воздухоочистителями).
Способ может включать в себя взятие показаний V1 датчика от целевого датчика S1. В некоторых вариантах осуществления, может быть взято множество показаний для определения фоновых изменений или дрейфа нулевой линии. Воздухоочиститель приводится в действие, и при работающем воздухоочистителе берутся показания (V2, V3, V4 etc.) датчика. На основании изменений показаний датчика и ожидаемой нагрузки воздухоочистителя можно определить, находятся ли датчики и воздухоочиститель в одном и том же пространстве или нет.
Изложенные выше этапы могут быть частью более сложной последовательности управления и связи, управляемой регулятором. Эта последовательность может включать в себя этапы, требуемые для автоматического включения или выключения различных компонентов системы и для вызова правильных режимов работы.
Единственный воздухоочиститель может быть приведен в действие каждый раз для определения наличия совместного расположения. Тем не менее, если два воздухоочистителя имеют независимые функции (например, увлажнение, очищение), то определение может быть выполнено параллельно для них обоих. Например, рассмотрим блок датчиков с датчиками твердых частиц (PM), температуры (T) и относительной влажности (RH) и соединенными с ним воздухоочистителем и увлажнителем. Посредством приведения в действие очистителя и измерения изменения показаний датчика PM, система может определять, находятся ли блок датчиков и очиститель в одном и том же воздушном пространстве. Это может быть выполнено таким же образом для увлажнителя.
Определение того, находятся ли два устройства в одном и том же воздушном пространстве, не должно быть обязательно основанным на определении двух состояний. Например, очиститель, находящийся в отдельной комнате, но с открытой дверью в комнату, влияет на воздух в смежной комнате. Это также может быть определено посредством задержки времени и уменьшения воздействия очистителя.
Такие способы также могут быть использованы для определения, находятся ли два очистителя в одном и том же пространстве. Например, рассмотрим очиститель, нацеленный в целом на частицы и летучие органические соединения (ЛОС) (volatile organic compounds (VOCs)), имеющий датчик частиц. Второй очиститель оптимизирован для формальдегида, но также имеет фильтр частиц. Посредством приведения в действие второго очистителя, первый очиститель может определять, находятся ли они в одном и том же пространстве, на основании его датчика частиц. Зная, находятся ли устройства восприятия воздуха и управления воздухом в одном и том же воздушном пространстве, система может осуществлять интеллектуальное управление воздухом согласно требованиям пользователя.
В вариантах осуществления изобретения, система содержит несколько соединенных устройств, причем они могут быть соединены несколькими способами: равный с равным; каждый с управляющим приложением; каждый с интернет-сервером для управления; или посредством другого способа. Соединение может быть выполнено через беспроводную сеть (например, через сеть передачи данных Wi-Fi или 3/4G).
Когда к регулятору присоединяется новое устройство (датчик или воздухоочиститель), его свойства становятся доступными для регулятора. Свойства разделяются на два класса: восприятие - перечень датчиков в устройстве, может включать в себя подробную информацию о единицах измерения, чувствительности, эффективности и так далее; и управление - способы управления воздухом (очищение, увлажнение (осушение) и так далее), может включать в себя подробную информацию об ожидаемой эффективности (например, тип фильтра или целевые загрязнители).
На основании этих данных, регулятор может проверять совместное расположение с новым устройством на основании обозначенных свойств. Во время нормального использования регулятор может подтверждать отсутствие изменения относительных положений посредством подтверждения показаний датчиков при запуске управляющего устройства.
Следует понимать, что синхронизация использования совместно расположенных устройств может иметь несколько преимуществ. Например, преимущественным является регулировка влажности с использованием осушителя перед запуском воздухоочистителя, поскольку эффективность очистителя является наилучшей при определенной влажности.
В качестве другого примера, управление порядком работы двух воздухоочистителей может обеспечивать преимущества. Например, использование высокоэффективного очистителя, нацеленного на частицы, перед запуском очистителя, нацеленного на формальдегид, обеспечивает улучшение эффективности, поскольку последний очиститель не загрязняется частицами.
Таким образом, следует понимать, что существует множество преимуществ управления воздухоочистителями на основании данных датчиков, и что эти преимущества присутствуют в полной мере, только если датчик (датчики) определен (определены) как находящийся (находящиеся) в одном и том же воздушном пространстве, что и воздухоочиститель (воздухоочистители).
Варианты осуществления изобретения не ограничены конкретными типами воздухоочистителей или типами датчиков.
Неограничивающие примеры подходящих воздухоочистителей включают в себя: устройства для удаления твердых частиц (например, с использованием вентиляторов и фильтров); устройства для удаления летучих органических соединений (с использованием активированного угля); устройства для удаления формальдегида; увлажнители; осушители; устройства для удаления двуокиси углерода; источники кислорода; и устройства ионизации.
Неограничивающие примеры подходящих датчиков включают в себя: датчики частиц (например, с использованием оптических датчиков); датчики аэрозоля; датчики летучих органических соединений; датчики формальдегида; датчики относительной влажности; датчики температуры; датчики двуокиси углерода; датчики кислорода; и датчики ионизации.
На Фиг. 4 схематично показана система 200 обработки воздуха согласно второму варианту осуществления изобретения. Система 200 содержит воздухоочиститель 210, датчик 220, регулятор 230 и точку 240 доступа.
Очиститель 210 выполнен с возможностью отфильтровывания твердых частиц из воздуха. В этом варианте осуществления, очиститель 210 содержит вентилятор (не показан) и фильтр (не показан). В этом примере, очиститель 210 может работать в следующих режимах работы: турбо (режим очищения с очень высокой скоростью вентилятора); H (режим очищения с высокой скоростью вентилятора); M (режим очищения со средней скоростью вентилятора); и L (режим очищения с низкой скоростью вентилятора).
В этом варианте осуществления, датчик 220 представляет собой датчик частиц, который может определять концентрацию частиц в воздухе.
Очиститель 210 и датчик 220 соединены с точкой (AP) доступа 240 по беспроводному соединению Wi-fi. В этом варианте осуществления, датчик 220 выполнен с возможностью перемещения Комнатой A 201 и Комнатой B 202, которые являются комнатами в доме или квартире пользователя. В этом примере, Комната A 201 является жилой комнатой пользователя.
Регулятор 230 выполнен с возможностью управления работой очистителя 210. В этом варианте осуществления, регулятор 230 осуществлен с использованием приложения на смартфоне пользователя. Регулятор 230 соединен с AP 240 через Интернет 250.
Как описано ниже, регулятор 230 выполнен с возможностью определения, находятся ли датчик и очиститель в одном и том же воздушном пространстве (то есть, в этом примере, оба в Комнате A 201 или в Комнате B 202). Если датчик 220 и очиститель 210 определены как находящиеся в одном и том же воздушном пространстве, регулятор 230 выполнен с возможностью управления очистителем 210 с обеспечением его работы в режиме работы на основании данных датчика от датчика 220.
В иллюстративном варианте осуществления, пользователь хочет быстро очистить воздух внутри его жилой комнаты (Комната A 201) и затем поддерживать концентрацию частиц ниже пороговой величины без бесполезного расходования энергии.
Пользователь начинает процесс с использованием приложения на его смартфоне для приведения в действие регулятора 230. На этапе S20 (присутствуют данные о регистрации датчика?), приложение проверяет свою базу данных для определения, зарегистрированы ли в приложении какие-либо датчики. В этом примере, исходная регистрация компонентов системы, таких как датчики, требуется, чтобы система знала, вызывать ли оценку совместного расположения. Во время такой регистрации, специальные данные о датчике могут быть загружены в базу данных регулятора (не показано). Эта информация может включать в себя производителя, тип датчика, точность, IP-адрес, и так далее.
Если ни один датчик не зарегистрирован, регулятор 230 знает, что датчики в доме недоступны и, следовательно, определение совместного расположения в одном воздушном пространстве не имеет смысла. Вместо этого, регулятор 230 управляет очистителем для выполнения режима M работы (в этом примере режим очищения со средней скоростью вентилятора) на этапе S31 (выполнение режима M работы) до достижения заданного времени (S32 - заданное время достигнуто?) перед остановкой (S33).
Тем не менее, если датчик предварительно зарегистрирован, полезно определить, находятся ли датчик 220 и воздухоочиститель 210 в одном и том же воздушном пространстве (то есть, в одной комнате в этом примере), в результате чего первый может быть использован для оптимизации работы последнего.
Для этого, на этапе S21 (приведение в действие датчика и запрос данных V1 нулевой линии) регулятор 230 отправляет команду на приведение в действие датчику 220 вместе с запросом на предоставление концентрации V1 нулевой линии на этапе S22 (данные V1 получены?). Если эти данные не получены, то на этапе S23 (повторное отправление команды на приведение в действие датчика), регулятор 230 повторно отправляет команду на приведение в действие. Если эти данные все еще не получены (этап S24 - данные V1 получены?), регулятор 230 управляет очистителем для выполнения режима M работы (в этом примере режим очищения со средней скоростью вентилятора) на этапе S31 до достижения (S32) заданного времени (например, 5 минут).
После получения регулятором 230 концентрации V1 нулевой линии, регулятор 230 включает режим B работы в очистителе 210 (этап S25 - запуск режима B работы и сбор V2, V3, V4...). Режим B работы в этом примере представляет собой турбо режим. В результате этого, концентрация частиц вокруг очистителя 210 уменьшается относительно быстро.
Следовательно, величины, предоставленные датчиком 220, должны уменьшаться относительно быстро, если датчик 220 и очиститель 210 находятся в одном и том же воздушном пространстве.
Соответственно, на этапе S26 (V1>V2>V3>V4?), блок управления анализирует, удовлетворяют ли величины данных датчика через последовательные интервалы времени (например, через интервалы в одну минуту) V2, V3 и V4 неравенству V1 > V2 > V3 > V4.
Если V1 > V2 > V3 > V4, то регулятор 230 может сделать заключение о том, что как датчик 220, так и очиститель 210 находятся в одном и том же воздушном пространстве, и может запускать режимы работы, оптимизированные для этого сценария.
Например, в этом варианте осуществления, регулятор 230 управляет очистителем 210 с обеспечением его работы сначала в режиме H быстрого очищения (S27 - выполнение режима H работы) до падения концентрации ниже целевого уровня t (S28 - V ниже пороговой величины?) и затем переключается в режим L работы с более эффективным энергопотреблением с меньшим расходом потока (S29 - выполнение режима L работы) до достижения (S30 - заданное время достигнуто?) заданного времени перед остановкой (S33). Следует понимать, что другие варианты осуществления могут работать иначе. Например, когда концентрация падает ниже целевого уровня t, регулятор 230 может управлять очистителем 210 для его выключения, и затем повторного включения (например, в режиме L работы с эффективным энергопотреблением с меньшим расходом потока) для поддерживания концентрации ниже целевого уровня t. В качестве альтернативы, когда концентрация падает ниже целевого уровня t, регулятор 230 может управлять очистителем 210 с обеспечением его работы в режиме L работы с эффективным энергопотреблением до достижения нижней пороговой величины.
Если условие V1 > V2 > V3 > V4 не удовлетворено, то регулятор 230 может сделать заключение о том, что датчик 220 и очиститель 210 не находятся в одном и том же воздушном пространстве, и тогда регулятор 230 управляет очистителем для выполнения режима M работы (в этом примере режим очищения со средней скоростью вентилятора) на этапе S31 до достижения (S32) заданного времени перед остановкой (S33).
Следует понимать, что варианты осуществления изобретения не ограничены уменьшением параметра. После приведения в действие воздухоочистителя также может происходить увеличение параметра, которое может быть использовано для определения совместного расположения с датчиком. Например, это может происходить в случае использования увлажнителя воздуха и датчика влажности.
Следует понимать, что аппаратное обеспечение, используемое в вариантах осуществления изобретения, может принимать множество разных форм. Например, все компоненты регулятора могут быть предусмотрены в одном устройстве (например, как видно на Фиг. 2c), или разные компоненты системы могут быть предусмотрены в разных устройствах. В более широком смысле, следует понимать, что в вариантах осуществления изобретения может быть предусмотрена система, которая содержит одно устройство или несколько обменивающихся данными устройств.
Следует понимать, что термин ʺсодержитʺ не исключает других элементов или этапов, и что неопределенный артикль ʺaʺ или ʺanʺ не исключает множества. Единственный процессор может выполнять функции нескольких предметов, изложенных в формуле изобретения. Сам факт того, что конкретные измерения изложены в разных зависимых пунктах формулы изобретения, не означает невозможности преимущественного использования комбинации этих измерений. Любые ссылочные позиции в формуле изобретения не следует понимать как ограничивающие объем формулы изобретения.
Несмотря на то, что формула изобретения в этой заявке сформулирована в отношении конкретных комбинаций признаков, следует понимать, что объем защиты настоящего изобретения также включает в себя любые новые признаки или любые новые комбинации признаков, описанных в этом документе либо прямо, либо косвенно, или любое их обобщение, независимо от того, относится ли оно к тому же изобретению, которое здесь заявлено в любом пункте формулы изобретения, и решают ли они некоторые или все те же технические проблемы, которые решает основное изобретение. Таким образом, заявители указывают на то, что в ходе рассмотрения настоящей заявки или полученной из нее любой дополнительной заявки могут быть сформулированы новые пункты формулы изобретения в отношении таких признаков и/или комбинаций признаков.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОЧИСТКИ ВОЗДУХА | 2017 |
|
RU2733796C2 |
| СИСТЕМЫ И СПОСОБЫ КОНТРОЛЯ КАЧЕСТВА ВОЗДУХА И СОБЫТИЙ, КОТОРЫЕ МОГУТ ВЛИЯТЬ НА КАЧЕСТВО ВОЗДУХА, И ВЫПОЛНЕНИЯ КОРРЕКТИРУЮЩЕГО ДЕЙСТВИЯ | 2015 |
|
RU2699266C2 |
| ОБРАБОТКА ПЫЛИ | 2016 |
|
RU2655225C1 |
| УСТАНОВКА ДЛЯ КОНДИЦИОНИРОВАНИЯ ВОЗДУХА, ИМЕЮЩАЯ ОБОГАЩАЮЩЕЕ КИСЛОРОДОМ УСТРОЙСТВО | 2001 |
|
RU2259515C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ДАННЫХ О КАЧЕСТВЕ ВОЗДУХА | 2015 |
|
RU2628950C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ОЧИСТКОЙ ВОЗДУХА | 2015 |
|
RU2628557C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ОЧИСТКА ВОЗДУХА | 2017 |
|
RU2664231C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ | 2015 |
|
RU2704309C2 |
| УВЛАЖНЯЮЩЕЕ УСТРОЙСТВО | 2010 |
|
RU2511503C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОТПРАВКИ ПОДСКАЗКИ В ВИДЕ СООБЩЕНИЯ | 2015 |
|
RU2639353C2 |
Настоящее изобретение относится к системе обработки воздуха. Она содержит блок обработки воздуха, выполненный с возможностью обработки параметра воздушной среды; регулятор работы блока обработки воздуха и датчик определения величины, характеризующей параметр, с передачей данных регулятору, который выполнен с возможностью определения, находятся ли датчик и блок обработки воздуха в одном и том же пространстве воздушной среды, посредством управления блоком обработки воздуха с обеспечением его работы в первом режиме работы и выполнения анализа данных, полученных от датчика; причем если датчик и блок обработки воздуха определены как находящиеся в одном и том же пространстве, регулятор выполнен с возможностью управления блоком обработки воздуха с обеспечением его работы во втором режиме работы на основании данных от датчика. Блок обработки воздуха содержит воздухоочиститель, выполненный с возможностью фильтрации окружающей воздушной среды для обработки параметра воздушной среды; и если датчик и воздухоочиститель определены как не находящиеся в одном и том же пространстве воздушной среды, регулятор выполнен с возможностью управления воздухоочистителем с обеспечением его работы в третьем режиме работы, который не зависит от данных датчика. Это улучшает управление устройством обработки воздуха. 4 н. и 10 з.п. ф-лы, 5 ил.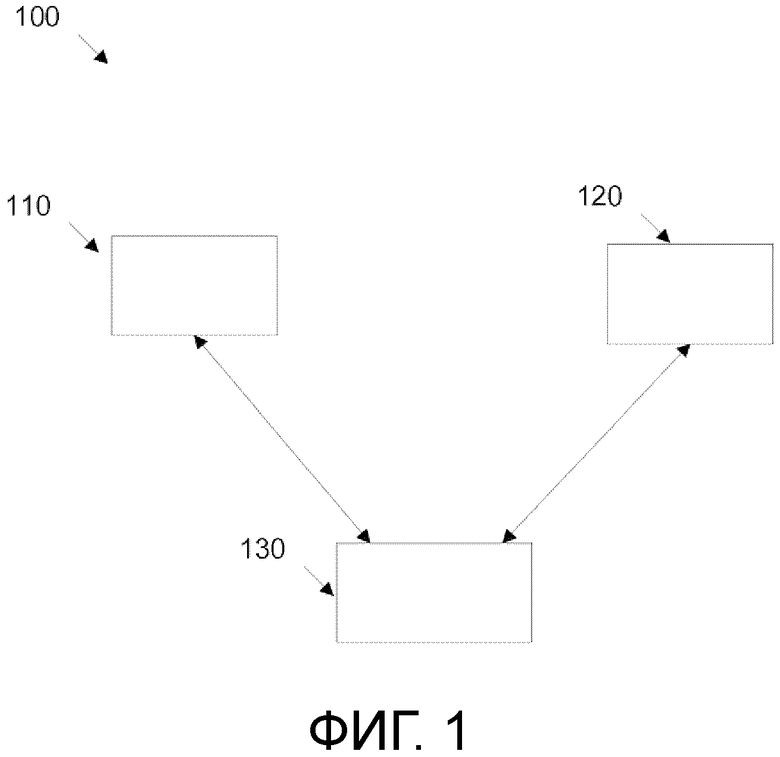
1. Система (100) обработки воздуха, содержащая:
блок обработки воздуха, выполненный с возможностью обработки первого параметра воздушной среды;
регулятор (130), выполненный с возможностью управления работой блока обработки воздуха; и
первый датчик (120), выполненный с возможностью определения величины, характеризующей первый параметр, и передачи данных датчика, характеризующих величину, регулятору (130);
причем регулятор (130) выполнен с возможностью определения, находятся ли первый датчик (120) и блок обработки воздуха в одном и том же пространстве воздушной среды, посредством управления блоком обработки воздуха с обеспечением его работы в первом режиме работы и выполнения анализа данных датчика от первого датчика, полученных во время первого режима работы;
причем если первый датчик (120) и блок обработки воздуха определены как находящиеся в одном и том же пространстве воздушной среды, регулятор (130) выполнен с возможностью управления блоком обработки воздуха с обеспечением его работы во втором режиме работы на основании данных датчика от первого датчика, и
отличающаяся тем, что
блок обработки воздуха содержит воздухоочиститель (110), выполненный с возможностью фильтрации окружающей воздушной среды для обработки первого параметра упомянутой воздушной среды; и
если первый датчик (120) и воздухоочиститель (110) определены как не находящиеся в одном и том же пространстве воздушной среды, регулятор (130) выполнен с возможностью управления воздухоочистителем (110) с обеспечением его работы в третьем режиме работы, который не зависит от данных датчика, характеризующих первый параметр.
2. Система обработки воздуха по п. 1, в которой в первом режиме работы, регулятор (130) выполнен с возможностью управления воздухоочистителем с обеспечением его работы заданным образом;
причем регулятор (130) выполнен с возможностью хранения данных, относящихся к ожидаемому изменению первого параметра, причем ожидаемое изменение характеризует изменение первого параметра, обнаружение которого посредством первого датчика ожидается, когда воздухоочиститель приводится в действие заданным образом с первым датчиком, находящимся в том же пространстве воздушной среды, что и воздухоочиститель;
причем регулятор (130) выполнен с возможностью определения, находятся ли первый датчик (120) и воздухоочиститель (110) в одном и том же пространстве воздушной среды посредством определения, соответствуют ли данные датчика, полученные во время первого режима работы, ожидаемому изменению первого параметра.
3. Система обработки воздуха по любому из предшествующих пунктов, в которой воздухоочиститель и/или первый датчик выполнены с возможностью перемещения относительно друг друга.
4. Система обработки воздуха по любому из предшествующих пунктов, в которой во втором режиме работы регулятор (130) выполнен с возможностью управления воздухоочистителем (110) с обеспечением его работы в режиме высокой мощности до тех пор, пока данные датчика от первого датчика не обозначат, что первый параметр прошел целевую величину;
причем после прохождения первым параметром целевой величины регулятор (130) выполнен с возможностью управления воздухоочистителем (110) с обеспечением его работы в режиме работы с пониженным энергопотреблением.
5. Система обработки воздуха по п. 4, в которой целевая величина представляет собой изменение первого параметра по сравнению с исходной величиной первого параметра.
6. Система обработки воздуха по любому из предшествующих пунктов, в которой регулятор (130) выполнен с возможностью определения, находятся ли первый датчик (120) и воздухоочиститель (110) в одном и том же пространстве воздушной среды, когда регулятор приведен в действие.
7. Система обработки воздуха по любому из предшествующих пунктов, в которой после определения регулятором (130), находятся ли первый датчик (120) и воздухоочиститель (110) в одном и том же пространстве воздушной среды, регулятор (130) выполнен с возможностью ожидания в течение заданного времени перед новым определением, находятся ли первый датчик (120) и воздухоочиститель (110) в одном и том же воздушном пространстве.
8. Система обработки воздуха по любому из предшествующих пунктов, в которой
первый датчик (120) и воздухоочиститель (110) находятся в беспроводном сообщении с регулятором (130) или
первый датчик (120) и воздухоочиститель (110) находятся в беспроводном сообщении с точкой доступа и регулятор (130) соединен с точкой доступа через сеть.
9. Система обработки воздуха по любому из предшествующих пунктов, в которой регулятор (130) выполнен с возможностью хранения информации о возможностях воздухоочистителя (110) и первого датчика (120).
10. Система обработки воздуха по любому из предшествующих пунктов, дополнительно содержащая второй датчик, выполненный с возможностью определения величины, характеризующей второй параметр, и передачи данных датчика, характеризующих величину, регулятору;
причем регулятор (130) выполнен с возможностью определения, находятся ли второй датчик и воздухоочиститель в одном и том же пространстве воздушной среды, посредством управления воздухоочистителем с обеспечением его работы в четвертом режиме работы и анализа данных датчика от датчика, полученных во время четвертого режима работы;
причем если второй датчик и воздухоочиститель (110) определены как находящиеся в одном и том же пространстве воздушной среды, регулятор (130) выполнен с возможностью управления воздухоочистителем (110) с обеспечением его работы дополнительно на основании данных датчика от второго датчика.
11. Система обработки воздуха по любому из предшествующих пунктов, дополнительно содержащая второй воздухоочиститель, выполненный с возможностью фильтрации окружающей воздушной среды для обработки первого параметра воздушной среды;
причем регулятор (130) выполнен с возможностью определения, находятся ли первый датчик (120) и второй воздухоочиститель в одном и том же пространстве воздушной среды, посредством управления вторым воздухоочистителем с обеспечением его работы в пятом режиме работы и анализа данных датчика от первого датчика, полученных во время пятого режима работы;
причем если первый датчик (120) и второй воздухоочиститель определены как находящиеся в одном и том же пространстве воздушной среды, регулятор выполнен с возможностью управления вторым воздухоочистителем с обеспечением его работы на основании данных датчика от первого датчика.
12. Регулятор (130) для системы (100) обработки воздуха, которая содержит блок обработки воздуха, выполненный с возможностью обработки первого параметра воздушной среды, и первый датчик (120), выполненный с возможностью определения величины, характеризующей первый параметр; причем регулятор (130) содержит:
механизм (133) обмена данными, выполненный с возможностью получения данных датчика от первого датчика, характеризующих величину первого параметра, и отправки управляющей информации блоку обработки воздуха;
управляющий механизм (131), выполненный с возможностью определения управляющей информации и определения, находятся ли первый датчик и блок обработки воздуха в одном и том же пространстве воздушной среды;
причем управляющий механизм (131) выполнен с возможностью определения, находятся ли первый датчик (120) и блок обработки воздуха в одном и том же пространстве воздушной среды, посредством управления блоком обработки воздуха с обеспечением его работы в первом режиме работы и выполнения анализа данных датчика от первого датчика (120), полученных во время первого режима работы;
причем если первый датчик (120) и блок обработки воздуха определены как находящиеся в одном и том же пространстве воздушной среды, управляющий механизм (131) выполнен с возможностью управления блоком обработки воздуха с обеспечением его работы во втором режиме работы на основании данных датчика от первого датчика (120), и
отличающейся тем, что
блок обработки воздуха содержит воздухоочиститель (110), выполненный с возможностью фильтрации окружающей воздушной среды для обработки первого параметра упомянутой воздушной среды, и
если первый датчик (120) и воздухоочиститель (110) определены как не находящиеся в одном и том же пространстве воздушной среды, регулятор (130) выполнен с возможностью управления воздухоочистителем (110) с обеспечением его работы в третьем режиме работы, который не зависит от данных датчика, характеризующих первый параметр.
13. Способ управления системой обработки воздуха, которая содержит блок обработки воздуха, выполненный с возможностью обработки первого параметра воздушной среды, и первый датчик (120), выполненный с возможностью определения величины, характеризующей первый параметр, причем способ содержит этапы:
управления блоком обработки воздуха с обеспечением его работы в первом режиме работы;
получения данных датчика от первого датчика (120), полученных во время первого режима работы;
определения, находятся ли первый датчик (120) и блок обработки воздуха в одном и том же пространстве воздушной среды, посредством выполнения анализа данных датчика от первого датчика (120), полученных во время первого режима работы;
если первый датчик (120) и блок обработки воздуха определены как находящиеся в одном и том же пространстве воздушной среды, управления блоком обработки воздуха с обеспечением его работы во втором режиме работы на основании данных датчика от первого датчика (120), и
отличающаяся тем, что
блок обработки воздуха содержит воздухоочиститель (110), выполненный с возможностью фильтрации окружающей воздушной среды для обработки первого параметра упомянутой воздушной среды, и
если первый датчик (120) и воздухоочиститель (110) определены как не находящиеся в одном и том же пространстве воздушной среды, способ содержит этап управления воздухоочистителем (110) с обеспечением его работы в третьем режиме работы, который не зависит от данных датчика, характеризующих первый параметр.
14. Машиночитаемый носитель, несущий машиночитаемый код для управления регулятором для выполнения способа по п. 13.
| US 5602758 A, 11.02.1997 | |||
| US 2014319232 A1, 30.10.2014 | |||
| 0 |
|
SU157084A1 | |

