ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к способу и к устройству для обработки пыли, такому как измерение пыли и/или удаление пыли на основе измерения.
УРОВЕНЬ ТЕХНИКИ
Документ WO 01/72199 раскрывает устройство для уборки комнат. По меньшей мере, одно измерительное средство подсоединено к системе управления и предназначено для непрерывного измерения, по меньшей мере, содержания частиц в комнате и для передачи измерительных сигналов в систему управления. Система управления содержит запоминающее устройство для хранения предопределенного значения чистоты, измерительных сигналов от измерительного средства и инструкций по чистке для уборки комнаты. Система управления подключена к дисплейному блоку для отображения определенной программы уборки.
Документ US 2009/0119867 описывает электрический пылесос, который включает в себя датчик количества пыли для восприятия количества частиц пыли различного размера (например, частиц пыли, имеющих диаметр 0,1 мм и 0,03 мм). Определяющий контроллер управляет подачей электропитания на электрический вентилятор на основе количества частиц пыли различного размера, измеренного датчиком количества пыли. Для частиц пыли каждого размера определяется оптимальная уставка мощности, а затем используется максимальное значение из этих уставок мощности.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Помимо прочего, задачей изобретения является - обеспечить улучшенную обработку пыли. Изобретение определено независимыми пунктами формулы изобретения. Предпочтительные варианты осуществления определены в зависимых пунктах формулы изобретения.
Согласно одному аспекту изобретения создан способ обработки пыли, согласно которому измеряют первое количество частиц первого размера (например, РМ10) и измеряют второе количество частиц второго размера (например, РМ2.5), меньшего, чем первый размер. Затем определяют, превышает ли первое количество второе количество на заданную пороговую величину. Если так, то пользователь может быть информирован о необходимости начать уборку или же роботизированному пылесосу может быть отдана команда на начало уборки комнаты.
Согласно другому аспекту изобретения создано устройство для обработки пыли для осуществления способа обработки пыли по настоящему изобретению, при этом устройство для обработки пыли содержит счетчик частиц для измерения первого количества частиц первого размера и второго количества частиц второго размера, меньшего, чем первый размер, и схему управления для определения того, превышает ли первое количество второе количество на заданную пороговую величину.
Согласно еще одному аспекту изобретения создана система для обработки пыли, содержащая такое устройство для обработки пыли, при этом схема управления имеет выход для создания сигнала управления, указывающего, превышает ли первое количество второе количество на заданную пороговую величину, а также уборочный аппарат (например, роботизированный пылесос и/или очиститель воздуха, или их очищающие части), имеющий вход для приема сигнала управления для начала операции по уборке в зависимости от этого сигнала управления. Эта система для обработки пыли может быть встроена в очиститель воздуха или в пылесос, или же, как вариант, устройство для обработки пыли может быть выполнено раздельно с очистителем воздуха или с пылесосом, а в еще одном альтернативном осуществлении устройство для обработки пыли может быть частью очистителя воздуха, в то время как его сигнал управления (также) используется для управления пылесосом.
Эти и другие аспекты изобретения станут понятными, будучи пояснены со ссылками на нижеописанные варианты исполнения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
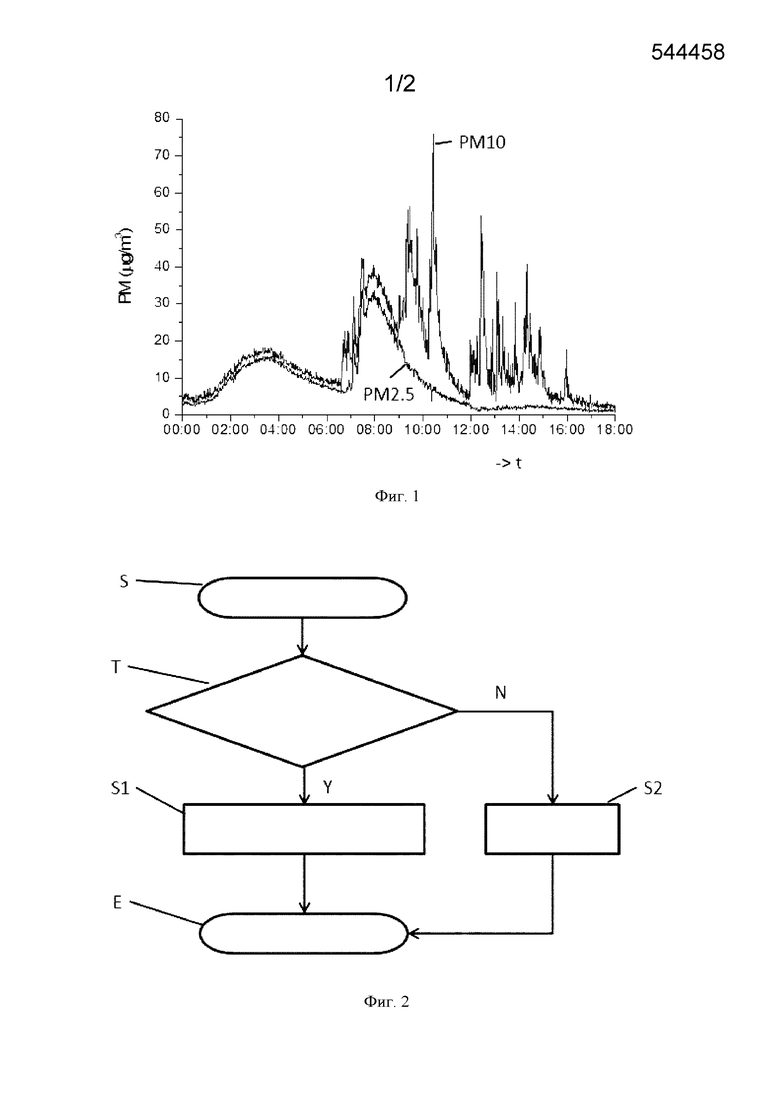
Фиг. 1 показывает пример изменения количества частиц PM2.5 и PM10 в реальных бытовых условиях;
фиг. 2 показывает блок-схему способа в соответствии с вариантом осуществления изобретения; и
фиг. 3 показывает основной вариант осуществления системы в соответствии с изобретением.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Взвешенные в воздухе частицы в зависимости от их размера обладают различными характеристиками "взвешенности" и осаждения. Например, PM1 и PM2.5 (взвешенные в воздухе частицы в диаметре, соответственно, менее 1 мкм и 2,5 мкм) представляют собой взвешенные частицы, которые обычно имеют очень длительное время осаждения. Датчики частиц PM2.5 способны обнаруживать такие аэрозоли, как частицы, образованные в результате горения, органические составляющие, дым от сигарет или от выпекаемых продуктов и т.д. Обозначение PM5 относится к частицам размером до 5 мкм. Однако более крупные частицы, такие как PM10 (более крупные частицы размером менее 10 мкм) из-за своей большей массы имеют значительно более короткое время осаждения на поверхностях. Частицы PM10 относятся к крупным частицам, таким как пыль, пыльца и плесень, которые составляют бóльшую часть пыли и грязи на поверхностях внутри помещений. Частицы PM200 (охватывающие частицы грязи размером до 200 мкм), кроме того, обычно являются и волосами домашних животных. Один объект настоящего изобретения обеспечивает способ оценки фактического внутреннего уровня пыли для современных приложений, относящихся к уборке и поддержанию чистоты, таким как уборка и удаление пыли пылесосом.
Бытовая чистка представляет собой деятельность, связанную с затратой времени и энергии. Время, затрачиваемое на уборку всего дома, составляет порядка нескольких часов, что для насыщенной городской жизни является серьезной величиной. Это породило ряд инновационных идей для дальнейшей автоматизации домашней уборки, таких как роботизированные пылесосы, которые могут выполнять эти обычные задачи в автономном режиме.
Современные роботизированные пылесосы, если они не ограничены визуальными или не визуальными маркерами (например, так называемыми навигационными маркерами "маячкового" типа) или физическими препятствиями (например, дверными порогами, дверями и т. д.), обрабатывают всю площадь пола. Это обязанность для роботизированного пылесоса, поскольку пылесос должен отвечать следующим минимальным требованиям:
- достаточный источник энергии → диктует необходимость большой емкости аккумуляторной батареи;
- достаточная способность по сбору пыли → определяет камеру большого объема для сбора пыли.
- достаточные вычислительные возможности для исполнения алгоритмов, предназначенных для оптимизации рабочей траектории.
Эти требования вызывают увеличение спецификации материалов, размера аппарата, а также общее потребление электроэнергии. Учитывая все возрастающую необходимость минимизации общих затрат на электроэнергию, потребляемую устройствами вакуумной уборки, при пересмотре требований к потреблению электроэнергии было бы полезным предотвращение излишней уборки уже чистых и (или) не сильно загрязненных зон.
Вакуумная уборка обычно проводится на периодической основе (например, еженедельно), и почти всегда по всей площади внутренних помещений, например жилой или офисной площади. Однако не все участки площади помещения используются одинаково часто, и на различных участках площади это приводит к возникновению разных уровней пыли и (или) загрязнения. В настоящее время существует потребность в получении информации такого рода посредством методов объективных измерений, которая могла бы направлять автоматические устройства для проведения уборки в тех местах, где это действительно необходимо.
Один объект настоящего изобретения описывает способ обнаружения "грязных" зон внутри помещении, что будет способствовать решению вышеупомянутых проблем и обеспечит следующие преимущества:
- минимизацию излишних циклов чистки в чистых зонах;
- создание объективного критерия принятия решений для выбора автоматическими чистящими устройствами зон уборки.
Посредством минимизации зон уборки достигается:
- минимизация общего энергопотребления устройством,
- как следствие - минимизация размера аккумуляторной батареи,
- минимизация размеров устройства (например, высоты и диаметра), а также увеличение достижимости зон уборки.
Один вариант осуществления изобретения основан на использовании данных, генерируемых детекторами частиц, особенно детекторами частиц, способными определять разницу между малой и большой концентрацией частиц, например между частицами PM2.5 и PM10. Соответствующие детекторы частиц являются коммерчески доступными, например от компании Shinyei.
На фиг. 1 приведен пример характеристик частиц PM2.5 и PM10 в реальных бытовых условиях (жилая комната в доме, где проживают два взрослых человека), который показывает концентрацию PM в мкг/м3 частиц во времени t в часах в течение дня. Примерно в 3 часа ночи происходит повышение уровня фонового аэрозоля. Примерно в 8 часов утра наблюдается пик, обусловленный завтраком (яичница). Утром и днем после полудня появляются пики частиц PM10, вызванные обычными ежедневными действиями. Упомянутые пики частиц PM10 относятся к концентрации пыли и аллергенов. Соотношение между концентрацией частиц PM2.5 и PM10, представленное на фиг. 1, имеет два важных аспекта:
1. Уровни частиц PM2.5 и PM10 находятся в хорошем согласии со временем наступления событий, обуславливающих генерацию аэрозолей (например, приготовления пищи) или с изменениями концентрации фонового аэрозоля (например, загрязнение наружного воздуха).
2. Пики частиц PM10 связаны с активностью человека (например, хождение), и обусловлены движением воздуха, которое также поднимает осажденную пыль с поверхностей.
Фиг. 1 показывает четкое различие между событиями, обуславливающими генерацию аэрозолей, и активностью человека, приводящей к перемещению пыли. Разница между концентрацией частиц PM10 и PM2.5 свидетельствует:
- об активности человека в квартире → дает статистику его присутствия и (или) действий;
- о накопленном уровне пыли → представляет собой индикацию необходимости проведения уборки;
- об уровне пыли во времени → визуализирует потребительскую выгоду.
Частицы PM2.5 являются подмножеством частиц PM10. Другими словами, частицы PM10 не исключают присутствия частиц PM2.5, но помимо частиц PM2.5 добавляют еще долю бóльших частиц.
Существует ряд случаев (особенно в помещении), когда уровень частиц PM2.5 почти равен уровню частиц PM10, - это результат различных преобладающих событий, которые создают только частицы небольшого размера, то есть "тонкую" пыль, - например, в случае приготовления пищи или при курении сигарет, - при этом концентрации частиц PM10 и PM2.5 почти равны. На фиг. 1 первые два пика дают почти равные величины для частиц PM2.5 и PM10. Это результат событий, которые порождают только "тонкие" аэрозоли и не порождают никаких "грубых" частиц.
Хотя и только для частиц PM2.5 может потребоваться действие, связанное с уборкой помещения, для таких мелких частиц эффективна только работа воздухоочистителя или воздушного фильтра. Вакуумная уборка предназначена для эффективного удаления только "грубых" частиц, то есть пыли, которая осела на поверхностях. Поэтому в настоящем изобретении в качестве предпочтительного индикатора оценки уровня пыли основное внимание уделяется различию между уровнями частиц PM10 и PM2.5, поскольку это различие означает наличие некоторого количества "грубой" пыли, которое может быть удалено посредством работы с пылесосом.
Если уровень частиц PM10 в комнате уменьшился, то мы знаем, что комната чистая. Увеличение уровня частиц PM10-PM2.5 может стать "инициирующим фактором" для уборки комнаты. Этот "инициирующий фактор" может заставить пользователя убрать комнату обычным пылесосом. Альтернативно, этот "инициирующий фактор" может запустить в работу роботизированный пылесос, чтобы убрать комнату.
Детекторы частиц, предназначенные для обнаружения взвешенных в воздухе частиц, соответствующих уровням малых (например, PM2.5) и больших (например, PM10) частиц, могут быть реализованы, например, нижеуказанным образом. Датчик частиц (например, основанный на рассеяния света), в основном, способен измерять оба диапазона с взаимно различными настройками времени выборки, скорости воздушного потока при заборе образца и т. д., известными специалистам в данной области техники. Некоторые возможные адаптации датчиков частиц, предназначенные для повышения избирательности по размерам, были описаны в более ранних предварительно не опубликованных патентных заявках заявителя ЕР14190779.0 (номер по реестру патентного поверенного 2014PF01211) и ЕР14191227.9 (номер по реестру патентного поверенного 2014PF01214), включенных сюда путем ссылки.
Вариант осуществления настоящего изобретения основан на этих двух основных аспектах характеристик аэрозолей или частиц для получения нижеследующей информации об уровне чистоты или загрязнения в помещении.
1. Статистика использования площади или комнаты: количество и ширина пиков частиц PM10 указывают на присутствие человека на этой площади или в комнате. Кроме того, обратите, пожалуйста, внимание, что для домашних условий эти пики могут также относиться к активности домашних животных. Однако с точки зрения уборки квартиры это не имеет значения, так как переносимые вместе с домашними животными волосы домашних животных, перхоть домашних животных и пыль или грязь являются одинаково важными факторами поддержания чистоты внутри помещения.
2. Уровень осажденной пыли: разница (дельта) между уровнем концентрации малых и больших частиц (предпочтительно представленными, соответственно, уровнями PM2.5 и PM10) коррелирована с количеством осажденной пыли в помещении. Усреднение по времени этой разницы указывает на общий уровень чистоты или загрязненности помещения или площади.
Вариант осуществления изобретения обеспечивает устройство, содержащее:
- детектор частиц для обнаружения частиц, по меньшей мере, в этих двух классах размеров частиц,
- блок приема и обработки сигналов и данных, который отслеживает отдельные пики больших концентраций частиц (например, PM10),
- память для хранения данных во времени для обеспечения временнóй информации о разнице между уровнями малых и больших частиц,
- возможный блок управления для управления скоростью воздуха вблизи с детектором частиц для нормализации пиков концентрации крупных частиц по фактической скорости воздуха и
- пользовательский интерфейс и (или) другие элементы чистящего устройства для обеспечения пользователю обратной связи по уровню чистоты или загрязнения.
Различные объекты изобретения обеспечивают нижеследующие варианты осуществления.
1. По меньшей мере, один детектор частиц, предпочтительно оптический детектор частиц (то есть основанный на рассеянии света), который способен различать классы размеров частиц - малых и больших частиц, которые относятся, соответственно, к аэрозольным и к пылевым частицам.
2. В альтернативном варианте осуществления - бытовой прибор, состоящий из детектора частиц; например, в воздухоочистителе, который передает своей экосистеме данные об уровнях загрязнения воздуха внутри помещения по разным классам размеров, соответствующих аэрозольным частицам и оседающей пыли (например, по PM2.5 и PM10).
3. В еще одном варианте осуществления - автономный блок датчика, который, среди прочего, содержит детектор частиц в соответствии с двумя предыдущими пунктами.
4. Возможное средство для создания контролируемого движения воздуха вблизи датчиков частиц, например,
а) в виде дуновения воздуха на представляющей интерес поверхности (скажем, на полу), например, посредством небольшого насоса или вентилятора;
b) посредством управляемого перемещения какого-либо элемента, скажем, пылесоса (например, вращением очищающей углы щетки этого пылесоса);
c) путем перемещения самого роботизированного очищающего устройства, предпочтительно с известной скоростью;
d) посредством использования специализированного устройства "картографирования пыли" (не обязательно включающего в себя функцию уборки), которое перемещается по интересующей площади и собирает информацию о пыли.
5. В варианте, альтернативном и (или) дополнительном к четвертому варианту осуществления, включая в блок контроля скорости воздуха для оценки скоростей тока воздуха, обусловленных предназначенными для этого устройствами (например, вентиляторами, насосами или щеткой) или непреднамеренными средствами, такими как движения человека или токи воздуха в помещении.
6. Блок приема сигналов или данных для сбора информации от встроенного устройства, или от части другого электроприбора, или от отдельно установленных детекторов частиц, или от другого электроприбора, как это описано выше.
7. Блок обработки сигналов или данных, предназначенный для обработки данных, принятых от детекторов частиц, для получения следующей информации:
а) количества пиков больших частиц → для указания частоты уборки помещения или площади;
b) разницы между уровнями малых и больших частиц → для указания уровня чистоты или загрязненности помещения или площади;
с) (с поддержкой возможности сохранения локальных или облачных данных) подсчета временнóго отклонения разницы между уровнями малых и больших частиц.
8. Вышеупомянутый блок обработка сигналов или данных и (или) вспомогательный вычислительный блок (например, мобильное устройство, другой электроприбор и т.д.), которое способно осуществлять процессы принятия решений, основанные на соотношении между вышеупомянутой информацией в четвертом варианте осуществления.
9. Пользовательский интерфейс для предоставления обратной связи пользователю относительно уровня чистоты или загрязненности помещения или площади.
10. Средство связи и передачи данных между другими электроприборами и отдельными блоками датчиков и (или) внешними пользовательскими интерфейсами для передачи информации о чистоте или загрязненности заданного места.
11. Внутреннее или внешнее средство хранения и обработки временных данных для использования их в дальнейшем посредством интерфейса данных или информации, например графиков временных последовательностей, индикаторов уровня чистоты или загрязненности и т.д.
На фиг. 2 представлен пример основной блок-схемы процесса принятия простого решения относительно проведения уборки в зависимости от "значения запуска" (TV), которое является индикатором разницы концентрации больших и малых частиц, например Δ(РΜ10-РΜ2.5). Действительно, данная блок-схема может быть дополнительно расширена таким образом, чтобы процесс учитывал данные от множественных датчиков (в том числе - и от других приборов, которые содержат датчики частиц), а также - для учета временных различий между малыми и большими частицами. Процесс начинается на этапе S, а заканчивается на этапе E. На этапе T проверки проверяется, превышает ли разница между уровнями частиц PM10 и PM2.5 предел уровня загрязнения для данной комнаты. Если "Да" (Y), то на этапе S1 для этой комнаты начинается цикл уборки. Если "Нет" (N), то на этапе S2 помещение не убирается.
В предпочтительном варианте осуществления значение запуска (TV) или предел уровня загрязнения может быть выбран пользователем произвольно в зависимости от требуемого уровня чистоты или санитарии рассматриваемой площади. Кроме того, это позволяет устанавливать различные значения запуска для разных частей внутренних жилых и хозяйственных помещений, например низкий уровень значения запуска для спальни, более высокое значение - для гостиной и т.д. Некоторые примеры значения запуска могут быть следующими:
- TV<5 мкг/м3 → высокий уровень чистоты, например для спальни, площади кухни, для площадей с жильцами с высокой воздушной аллергенной чувствительностью и т.д.;
- 5 мкг/м3 <TV<20 мкг/м3 → средний уровень чистоты; и
- 20 мкг/м3 <TV<50 мкг/м3 → низкий уровень чистоты, например площади с интенсивным использованием, например гостиная, прихожая и т.д.
Фиг. 3 показывает основной вариант осуществления системы в соответствии с изобретением, включающей в себя датчики PC1, PC2 частиц для измерения, соответственно, уровней относительно больших частиц (например, PM200, предпочтительно, PM10) и относительно малых частиц (например, PM5, предпочтительно, PM2.5), а также схему управления Δ для вычисления разницы между этими уровнями. Этот вариант осуществления дополнительно может содержать дисплей D для отображения разницы между уровнями малых и больших частиц, как вариант, после интегрирования по времени. Этот вариант осуществления может дополнительно включать в себя роботизированный пылесос RVC, который начинает уборку помещения, если разница между уровнями превышает пороговое значение. Как вариант, дополнительный выход схемы управления Δ подсоединен к воздухоочистителю AP, который начинает работать при наличии уровней РМ2,5, превышающих порог, например, в 20 мкг/м3, если требуется относительно умеренное качество воздуха, или 10 мкг/м3, или даже 5 мкг/м3, если требуется относительно высокое качество воздуха. Комбинация датчиков частиц PC1, PC2 и схемы управления Δ может быть отдельным блоком, который дистанционно управляет роботизированным пылесосом RVC и (или) воздухоочистителем AP. Этот отдельный блок может не иметь своего собственного дисплея D, например, если он способен передавать на смартфон или на планшет (например, посредством технологии Bluetooth или WiFi) искомую разницу, чтобы смартфон или планшет могли отображать эту информацию для пользователя. Альтернативно возможно, чтобы комбинация датчиков частиц и схемы вычисления разности являлась частью воздухоочистителя AP и была способна дистанционно управлять роботизированным пылесосом RVC (например, посредством технологий Bluetooth, RF4CE или WiFi). Для частиц обоих размеров PM2.5 и PM10 можно использовать один датчик или счетчик частиц, если соответствующие счеты частиц выполняются последовательно, а настройки датчика изменяются в зависимости от размера подлежащих счету частиц.
Настоящее изобретение может быть использовано для работы роботизированных или автономных уборочных устройств, то есть для активации или эксплуатации этих устройств в тех местах, где они действительно необходимы. Таким образом была бы создана роботизированная система вакуумной уборки помещения на основе фактической информации об уровне загрязненности, другими словами, в режиме уборки по требованию, в результате включения в нее датчиков, указывающих уровень загрязненности на данной площади. В одном варианте осуществления система датчиков включает в себя по меньшей мере один датчик частиц, работающий в сенсорной экосистеме этого электроприбора, который способен измерять мелкие и большие частицы (например, PM2.5 и PM10). Эта сенсорная экосистема могла бы включать в себя датчики, расположенные в самом чистящем устройстве, подобные типам датчиков на других электроприборах (например, на очистителях воздуха), а также отдельно установленные сенсорные блоки. Альтернативно изобретение можно использовать при оказании профессиональных услуг по уборке, которые работают с оплатой по бизнес-моделям услуг по уборке, в системах управления содержанием аллергенов внутри помещения, в воздухоочистителях, в кухонных электроприборах с возможностью обнаружения частиц и в отдельных сенсорных блоках для контроля качества воздуха внутри помещения.
Следует заметить, что вышеупомянутые варианты осуществления скорее иллюстрируют, а не ограничивают изобретение и что специалисты в данной области техники смогут построить много альтернативных вариантов осуществления, не выходя за рамки объема приложенных пунктов формулы изобретения. В этих пунктах формулы изобретения любые ссылочные позиции, помещенные между скобками, не должны истолковываться как ограничивающие данный пункт. Слово "содержащий" не исключает присутствия элементов или этапов, отличных от тех, что указаны в пункте формулы изобретения. Признаки единственного числа, предшествующие какому-либо элементу, не исключает наличия множества таких элементов. Изобретение может быть реализовано посредством аппаратного средства, содержащего несколько отдельных элементов, и (или) посредством соответствующим образом запрограммированного процессора. В относящемся к устройству пункте формулы изобретения с перечислением нескольких средств, некоторые из этих средств могут быть реализованы одной и той же позицией аппаратного средства. Тот простой факт, что некоторые размеры приведены во взаимно различных зависимых пунктах формулы изобретения, не означает, что для получения преимущества не может быть использована комбинация этих размеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2831101C1 |
| ОЧИСТИТЕЛЬ ВОЗДУХА | 2021 |
|
RU2811247C1 |
| МЕХАНИЧЕСКИЙ ПРОБООТБОРНИК С КОНСТРУКЦИЕЙ МНОГОКАНАЛЬНОГО РАСПРЕДЕЛЕНИЯ ПОТОКА | 2018 |
|
RU2735362C1 |
| СПОСОБ ОБЖАРИВАНИЯ КОФЕЙНЫХ ЗЕРЕН | 2021 |
|
RU2838233C1 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА ЧИСТКИ (ВАРИАНТЫ) | 2007 |
|
RU2357644C2 |
| СПОСОБ ОЦЕНКИ ПРОИЗВОДИТЕЛЬНОСТИ ФИЛЬТРАЦИИ ВОЗДУШНОГО ФИЛЬТРА ПАССАЖИРСКОГО САЛОНА ПРИ ОТОПЛЕНИИ, ВЕНТИЛЯЦИИ И КОНДИЦИОНИРОВАНИИ ВОЗДУХА (HVAC) ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2698626C2 |
| ВЕРТИКАЛЬНЫЙ ПЫЛЕСОС С ФУНКЦИЕЙ WI-FI | 2023 |
|
RU2807623C1 |
| БЫТОВОЙ ЭЛЕКТРОПРИБОР ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2006 |
|
RU2394467C2 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВОЗДУХА ОТ АЭРОЗОЛЕЙ | 2013 |
|
RU2565000C2 |
| СИСТЕМА И СПОСОБ ИНДИКАЦИИ СОСТОЯНИЯ ВОЗДУХООЧИСТИТЕЛЬНОГО УСТРОЙСТВА И УПРАВЛЕНИЯ С ИХ ИСПОЛЬЗОВАНИЕМ | 2021 |
|
RU2770345C1 |

Способ обработки пыли, согласно которому измеряют (на этапе РС1) первое количество частиц первого размера (например, РМ10) и измеряют (на этапе РС2) второе количество частиц второго размера (например, РМ2.5), меньшего, чем первый размер. В соответствии с изобретением определяют (на этапе Δ), превышает ли первое количество второе количество на заданную пороговую величину. Если так, то роботизированному пылесосу может быть отдана команда на начало уборки комнаты. 3 н. и 6 з.п. ф-лы, 3 ил.
1. Способ обработки пыли, согласно которому
- измеряют (на этапе РС1) первое количество частиц первого размера;
- измеряют (на этапе РС2) второе количество частиц второго размера, меньшего, чем первый размер; и
- определяют (на этапе Δ), превышает ли первое количество второе количество на заданную пороговую величину.
2. Способ по п. 1, согласно которому, если первое количество превышает второе количество на заданную пороговую величину, то дополнительно убирают комнату с помощью роботизированного пылесоса (RVC).
3. Способ по п. 1, согласно которому, если первое количество превышает второе количество на заданную пороговую величину, то дополнительно информируют (на этапе D) пользователя.
4. Способ по любому из предыдущих пунктов, согласно которому упомянутый второй размер частиц составляет 5 мкм или менее.
5. Способ по п. 4, согласно которому упомянутый второй размер частиц составляет 2,5 мкм или менее.
6. Способ по любому из предыдущих пунктов, согласно которому упомянутый первый размер частиц составляет 200 мкм или менее.
7. Способ по п. 6, согласно которому упомянутый первый размер частиц составляет 10 мкм или менее.
8. Устройство для обработки пыли для осуществления способа по любому из предыдущих пунктов, при этом устройство для обработки пыли содержит
- счетчик (PC1, PC2) частиц для измерения первого количества частиц первого размера и второго количества частиц второго размера, меньшего, чем первый размер; и
- схему управления для определения (на этапе Δ), превышает ли первое количество второе количество на заданную пороговую величину.
9. Система для обработки пыли, содержащая
- устройство для обработки пыли по п. 8, в котором схема управления имеет выход для создания сигнала управления, указывающего, превышает ли первое количество второе количество на заданную пороговую величину; и
- уборочный аппарат (RVC, AP), имеющий вход для приема сигнала управления для запуска операции по уборке в зависимости от сигнала управления.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Дисперсионно твердеющая сталь | 1974 |
|
SU451787A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

