Область техники, к которой относится изобретение
Изобретение относится к детали газотурбинного двигателя, содержащей лопатки и площадку, имеющую неосесимметричную поверхность.
Уровень техники
Постоянная необходимость в усовершенствовании устройств, в частности, авиационных устройств, например, роторов газотурбинных двигателей (то есть узлов, состоящих из ступицы, на которой закреплены расположенные радиально лопатки, как показано на фиг. 1а), предопределяет в настоящее время применение компьютерных инструментов моделирования.
Эти инструменты помогают проектировать детали, автоматически оптимизируя некоторые из их характеристик посредством осуществления большого количества вычислений моделирования.
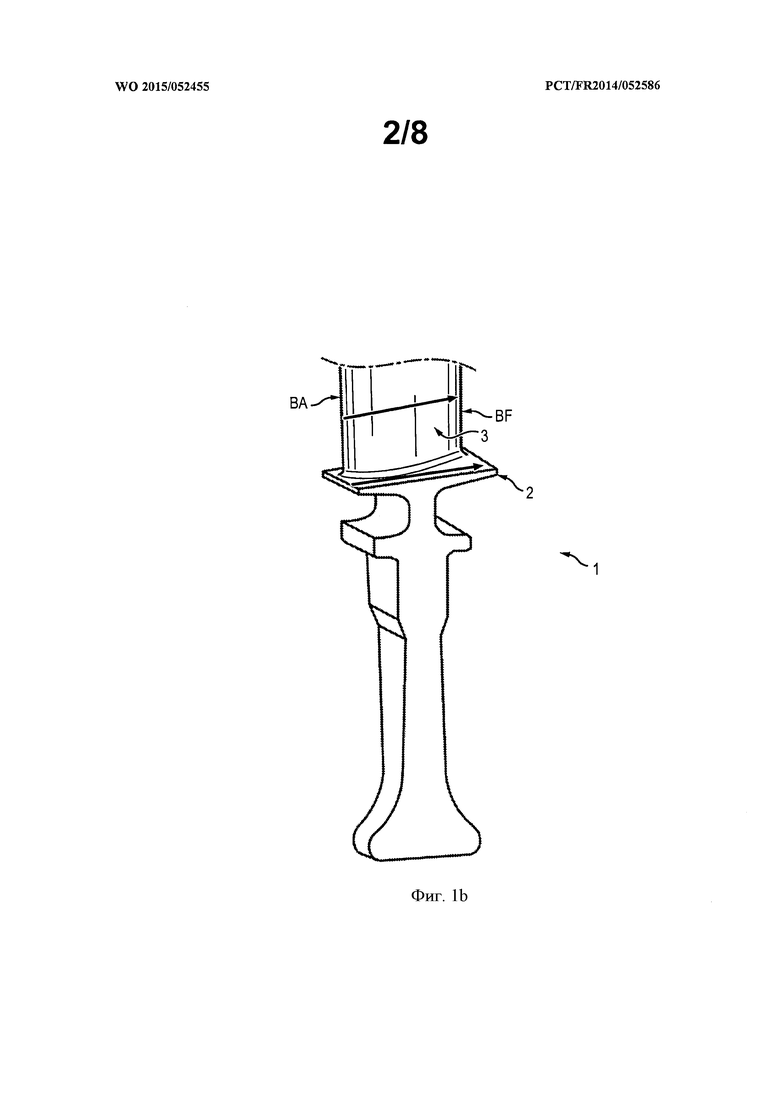
Например, из международной заявки WO 2012/107677 известны узлы лопатка/площадка (иначе говоря, узел, состоящий из лопатки и локальной поверхности ступицы или картера, на которой закреплена лопатка, например, показанный на фиг. 1b), оптимизированные посредством «вычерчивания контуров» (то есть посредством определения впадин и выпуклостей в стенке) и имеющие отличные характеристики в сверхзвуковом потоке. В частности, площадка имеет окружную выемку, проходящую радиально между передней кромкой и задней кромкой лопатки.
Однако отмечается, что эти осесимметричные геометрические формы можно еще больше усовершенствовать, в частности, на уровне ступеней компрессора газотурбинного двигателя: действительно, поиск аэромеханического геометрического оптимума на роторах/статорах в настоящее время привел к получению деталей, имеющих локально неосесимметричную стенку (то есть в которых сечение по плоскости, перпендикулярной к оси вращения, не является круглым) на уровне проточного тракта, то есть совокупности каналов между лопатками для потока текучей среды (иначе говоря межлопаточные участки) с учетом присутствующих там особых условий. Неосесимметричный проточный тракт образует в основном кольцевую поверхность трехмерного пространства («секцию» газотурбинного двигателя).
Кроме того, хотя неосесимметричные геометрические формы представляют интерес, манипулирование ими является сложным.
Желательно использовать их для улучшения характеристик с точки зрения КПД устройств, но без ухудшения управляемости и механической прочности.
Раскрытие изобретения
Таким образом, первым объектом изобретения является деталь газотурбинного двигателя, содержащая по меньшей мере первую и вторую лопатки и площадку, начиная от которой выполнены лопатки, причем площадка имеет неосесимметричную поверхность, ограниченную первой и второй концевыми плоскостями и образованную по меньшей мере тремя кривыми построения класса С1, каждая из которых отображает значение радиуса указанной плоскости в зависимости от положения между корытцем первой лопатки и спинкой второй лопатки по существу в плоскости, параллельной концевым плоскостям, в том числе:
- первой кривой, восходящей вблизи второй лопатки;
- второй кривой, расположенной между первой кривой и задней кромкой первой и второй лопаток и нисходящей вблизи второй лопатки;
- третьей кривой, расположенной между первой кривой и передней кромкой первой и второй лопаток и имеющей минимум на уровне первой лопатки.
Эта особая неосесимметричная геометрия поверхности детали обеспечивает отличный контроль потока и, следовательно, повышение КПД.
При этом механическая прочность нисколько не ухудшается.
Согласно предпочтительным и неограничивающим отличительным признакам:
- третья кривая является строго восходящей между корытцем первой лопатки и спинкой второй лопатки;
- третья кривая ниже первой кривой вблизи второй лопатки;
- первая кривая является строго восходящей между корытцем первой лопатки и спинкой второй лопатки;
- вторая кривая имеет локальный максимум между корытцем первой лопатки и спинкой второй лопатки;
- каждая кривая построения определена также положением вдоль хорды лопатки, проходящей от передней кромки к задней кромке лопатки;
- первая кривая соответствует положению, находящемуся между 0% и 60% относительной длины хорды лопатки, и вторая кривая соответствует положению, находящемуся между 65% и 100% относительной длины хорды лопатки;
- третья кривая соответствует положению, находящемуся между 0% и 25% относительной длины хорды лопатки, и первая кривая соответствует положению, находящемуся между 30% и 60% относительной длины хорды лопатки;
- площадка имеет кольцевую форму, вдоль которой равномерно расположено множество лопаток;
- площадка имеет одинаковую неосесимметричную поверхность между каждой паров последовательных лопаток;
- деталь является лопаточным колесом или спрямляющим аппаратом компрессора;
- каждую кривую построения моделируют при помощи средств обработки данных посредством осуществления следующих этапов:
(а) Параметризация кривой построения как кривой класса С1, отображающей значение радиуса указанной поверхности в зависимости от положения между корытцем первой лопатки и спинкой второй лопатки, при этом кривая определена:
- двумя экстремальными контрольными точками соответственно на каждой из двух лопаток, между которыми находится указанная поверхность;
- по меньшей мере одним сплайном;
при этом параметризацию осуществляют по одному или нескольким параметрам, определяющим по меньшей мере одну из экстремальных контрольных точек;
(b) Определение оптимизированных значений указанных параметров указанной кривой.
Вторым объектом изобретения является газотурбинный двигатель, содержащий деталь, являющуюся первым объектом изобретения.
Краткое описание чертежей
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания предпочтительного варианта осуществления. Это описание представлено со ссылками на прилагаемые чертежи, на которых:
на фиг. 1а (уже описана) показан пример газотурбинного двигателя;
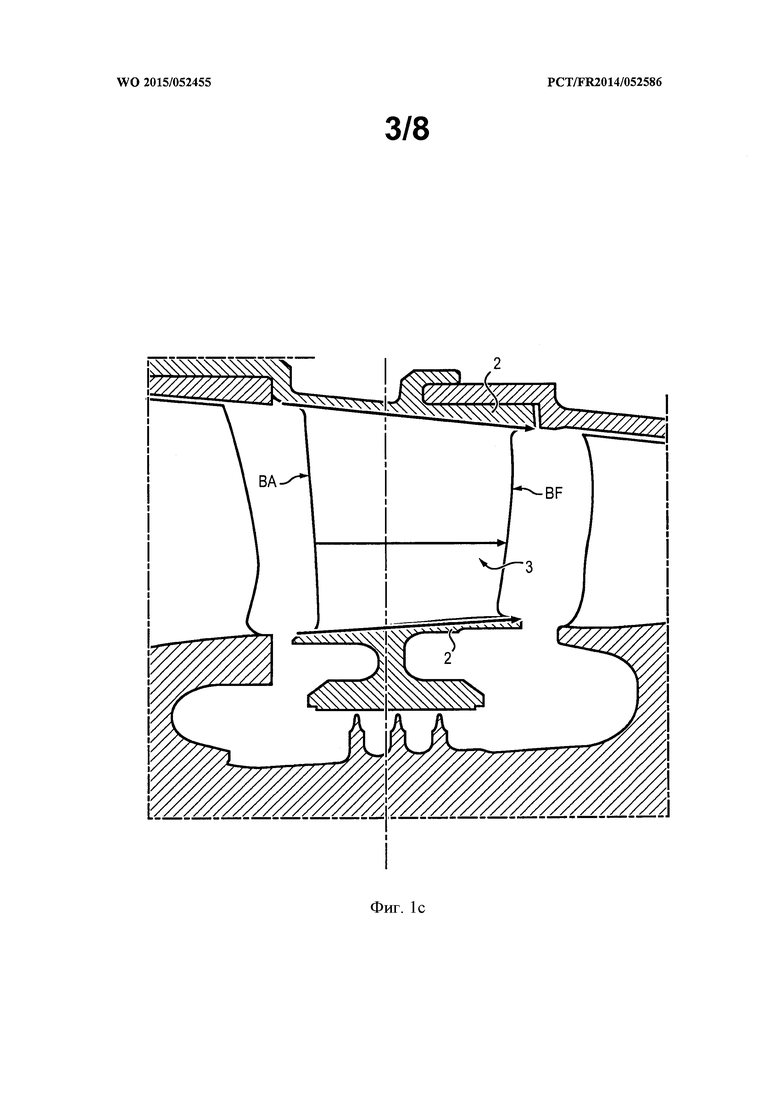
на фиг. 1b-1c представлены два примера узлов площадка/лопатка;
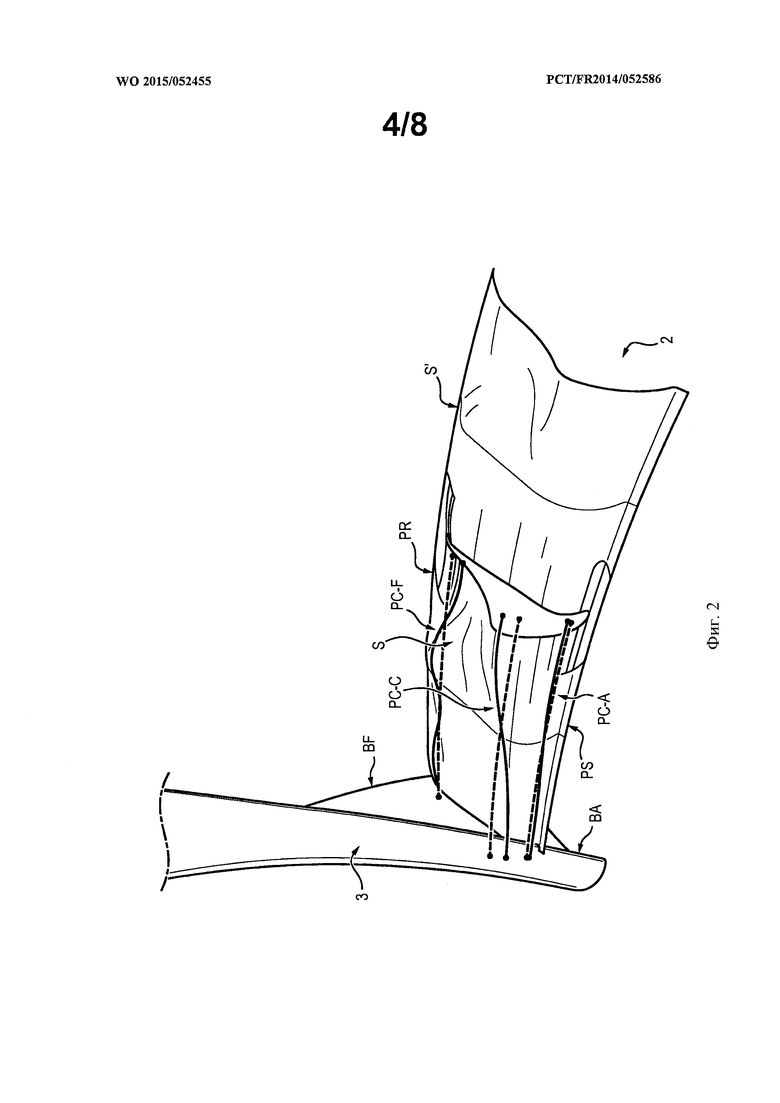
на фиг. 2 показана архитектура детали в соответствии с изобретением;
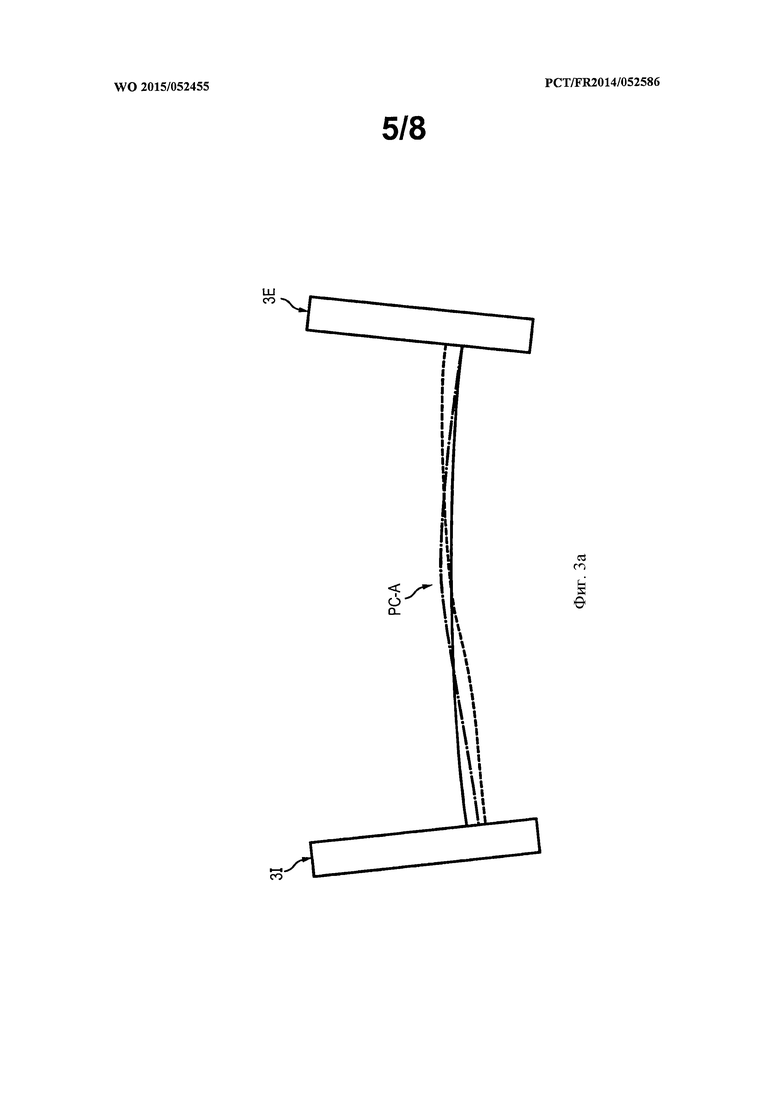
на фиг. 3а приведены примеры геометрии третьей кривой построения поверхности площадки детали в соответствии с изобретением;
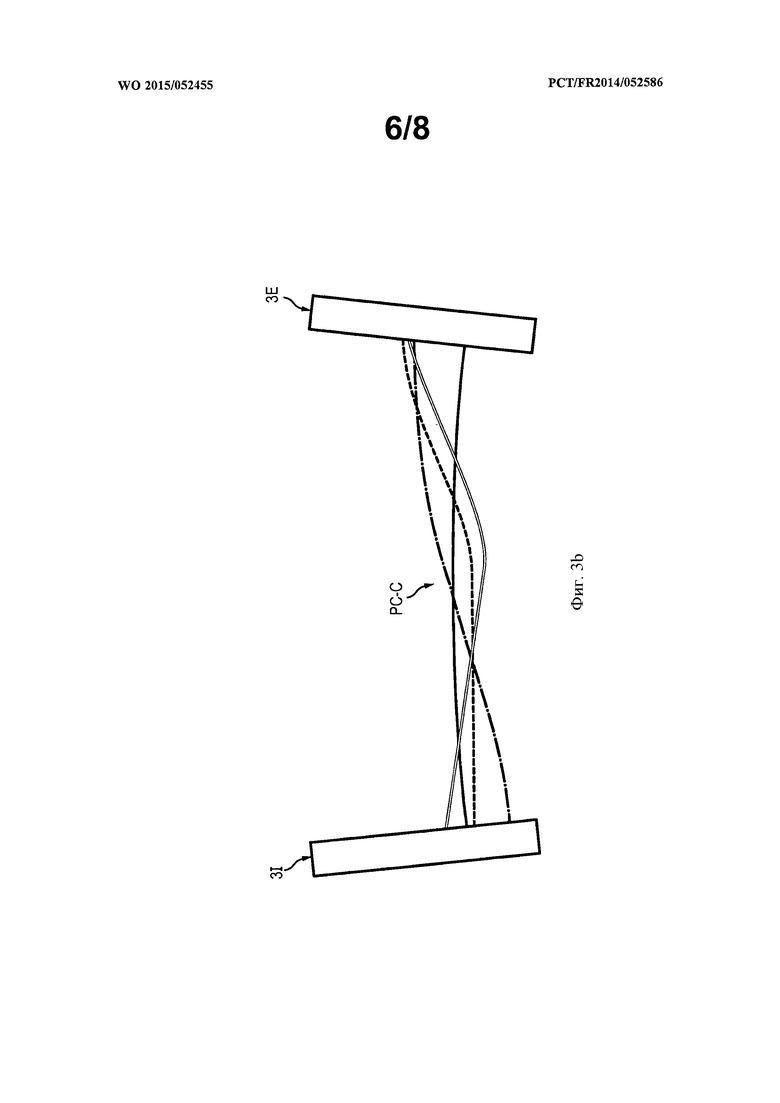
на фиг. 3b представлены примеры геометрии первой кривой построения поверхности площадки детали в соответствии с изобретением;
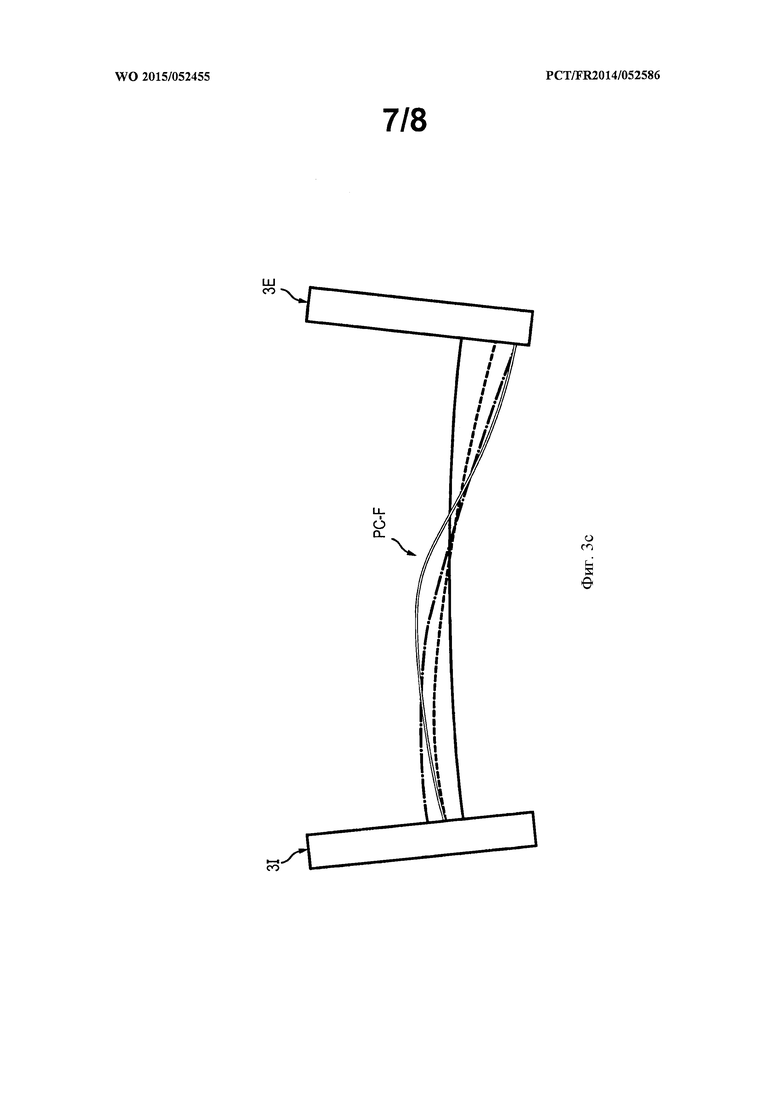
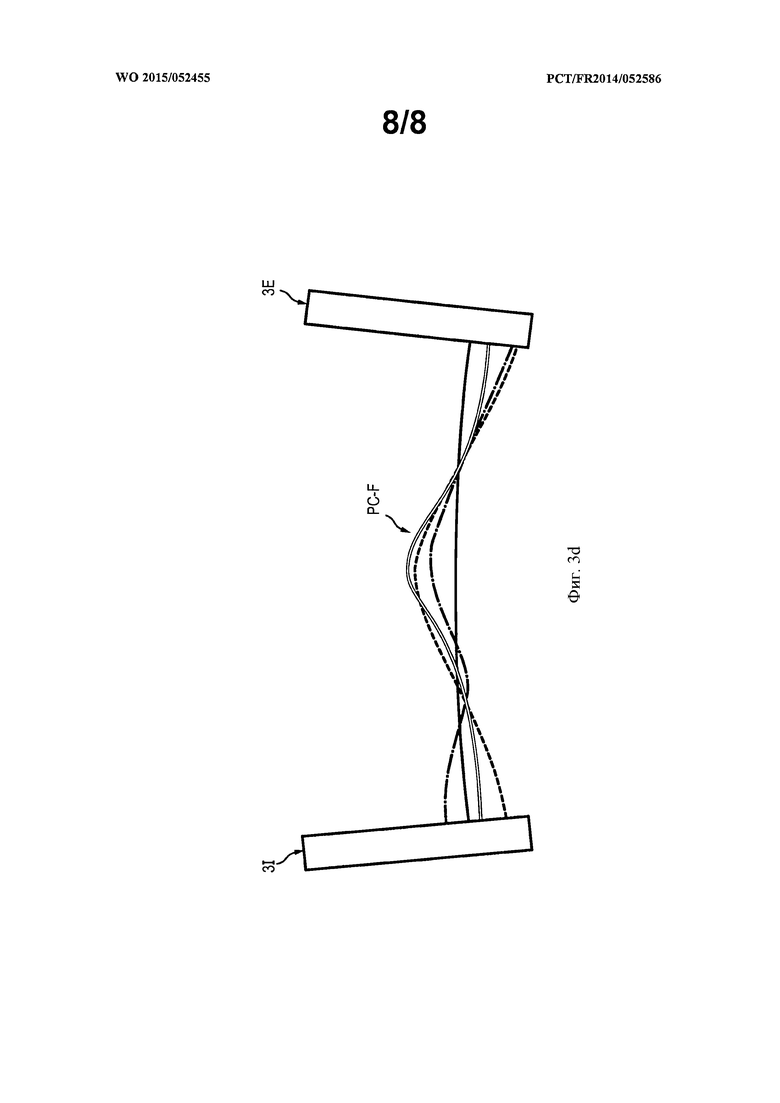
на фиг. 3с-3d представлены примеры геометрии второй кривой построения поверхности площадки детали в соответствии с изобретением.
Осуществление изобретения
Изобретение относится к детали 1 газотурбинного двигателя, в частности, к детали компрессора, содержащей по меньшей мере две лопатки 3 и площадку 2, от которой отходят лопатки 3. В данном случае термин «площадка» следует толковать в широком смысле и понимать как любой элемент газотурбинного двигателя, на котором устанавливают лопатки 3 (расположенные радиально) и который имеет внутреннюю/наружную стенку, вдоль которой циркулирует воздух.
В частности, площадка 2 может быть моноблочной (и в этом случае на ней установлены все лопатки детали 1) или может состоять из нескольких элементов, на каждом из которых установлена одна лопатка 3 («ножка» лопатки 3), образующая узел лопатки, показанный на фиг. 1b.
Кроме того, площадка 2 может ограничивать радиально внутреннюю стенку детали 1 (газ проходит вокруг нее), образующую ступицу, и/или радиально наружную стенку детали 1 (газ проходит внутри, при этом лопатки 3 направлены к центру), образующую картер детали 1. Следует отметить, что одна и та же деталь 1 может содержать одновременно эти два типа площадки 2 (см. фиг. 1с).
Таким образом, понятно, что деталь 1 может быть деталью самых разных типов, в частности, ступенью ротора (DAM («моноблочный лопаточный диск») или лопаточное колесо в зависимости от цельной или составной конструкции узла) или ступенью статора (неподвижный спрямляющий аппарат или спрямляющий аппарат с подвижными лопатками VSV (“Variable Stator Vane”)), в частности, на уровне компрессора, в частности, компрессора высокого давления (ВД), см. описанную выше фиг. 1а.
В дальнейшем описание будет касаться в качестве примера лопаточного диска DAM компрессора ВД, однако специалист в данной области может легко транспонировать его на другие типы деталей 1.
Поверхность площадки
Настоящая деталь 1 отличается особой (неосесимметричной) геометрией поверхности S площадки 2 детали 1, предпочтительный пример моделирования которой представлен на фиг. 2.
Поверхность S расположена между двумя лопатками 3 (одна из которых на фиг. 2 не показана, чтобы лучше представить поверхность S, и вместо нее видно пустое место), которые ограничивают ее сбоку.
Действительно, поверхность S являются частью более протяженной поверхности, образующей по существу тороидальную форму вокруг детали 1, которая, как было указано выше, является в данном случае ступенью ротора. В предпочтительном (но не ограничивающем) варианте с периодичностью по окружности детали 1 (то есть, когда лопатки 3 являются идентичными и равномерно распределенными), стенка состоит из нескольких идентичных поверхностей, повторяющихся между каждой парой лопаток 3.
Таким образом, поверхность S’, которая тоже показана на фиг. 2, является копией поверхности S.
На этой же фигуре показана линия, делящая каждую из поверхностей S и S’ на две половины. Эта конструкция соответствует варианту осуществления, в котором площадка 2 состоит из множества элементов, каждый из которых является ножкой, на которой выполнена лопатка 3 и с которой она образует узел лопатки. Каждая из этих ножек лопатки проходит, таким образом, по обе стороны от лопатки 3, поэтому поверхность S включает в себя две расположенные рядом друг с другом поверхности, соответствующие двум разным ножкам лопатки. Таким образом, деталь 1 представляет собой комплект по меньшей мере из двух расположенных рядом лопаток (узлов лопатка/ножка лопатки).
Поверхность S ограничена на входе первой концевой плоскостью, называемой «плоскостью разделения» PS, и на выходе - второй концевой плоскостью, называемой «плоскостью сопряжения» PR, каждая из которых образует осесимметричный контур, непрерывный и с непрерывной производной (кривая, соответствующая пересечению между каждой из плоскостей PR и PS и поверхностью детали 1, является в целом замкнутой и образует петлю). Поверхность S имеет по существу прямоугольную форму и простирается непрерывно между двумя концевыми плоскостями PS, PR и двумя лопатками 3 пары последовательных лопаток. Одна из лопаток этой пары является первой лопаткой 3I. Ее корытце находится на поверхности S. Другая лопатка является второй лопаткой 3Е. Ее корытце находится на поверхности S. Каждая «вторая лопатка» 3Е является «первой лопаткой» 3I соседней поверхности, такой как поверхность S’ на фиг. 2 (так как каждая лопатка 3 имеет корытце и спинку).
Поверхность S образована кривыми построения, называемыми также «плоскостями построения». Необходимо по меньшей мере три кривых построения РС-А, РС-С и РС-F для получения геометрии настоящей поверхности S.
Во всех случаях каждая кривая построения является кривой класса С1, отображающей значение радиуса указанной поверхности S в зависимости от положения между корытцем первой лопатки 3I и спинкой второй лопатки 3Е в плоскости, по существу параллельной концевым плоскостями PS, PR.
Под радиусом следует понимать расстояние между точкой поверхности и осью детали 1. Таким образом, осесимметричная поверхность имеет постоянный радиус.
Кривые построения
Три кривые расположены по существу на параллельных плоскостях. Первая кривая РС-С является «центральной» кривой. Вторая кривая РС-F является «задней» кривой, так как расположена вблизи задней кромки BF лопаток 3, между которыми она находится. Третья кривая РС-А является «передней» кривой, так как расположена вблизи передней кромки ВА лопаток 3, между которыми она находится.
Иначе говоря, текучая среда, проходящая в проточном тракте, встречает последовательно третью кривую РС-А, первую кривую РС-С и вторую кривую РС-F. Их положения не являются фиксированными, и предпочтительно каждая кривая построения РС-А, РС-С, РС-F определена положением вдоль хорды лопатки 3, проходящей между передней кромкой ВА и задней кромкой BF лопатки 3.
Такая хорда (а также хорды площадки 2) показана на фиг. 1b и 1с.
В такой системе отсчета третья кривая РС-А соответствует положению, находящемуся между 0% и 25% относительной длины хорды лопатки 3, первая кривая РС-С соответствует положению, находящемуся между 30% и 60% относительной длины хорды лопатки 3, и вторая кривая РС-F соответствует положению, находящемуся между 65% и 100% относительной длины хорды лопатки 3.
Как показано на фиг. 2, каждая кривая РС-А, РС-С и РС-F имеет специфическую геометрию. Аэродинамические эффекты этой геометрии будут показаны ниже.
На фиг. 3а-3d показаны несколько примеров каждой из этих кривых РС-А, РС-С и РС-F в сравнении с осесимметричной геометрией (постоянный радиус).
Как показано на фиг. 3а, третья кривая РС-А имеет минимум (общий) на уровне первой лопатки 3I (следовательно, она является восходящей вблизи первой лопатки 3I). Иначе говоря, на уровне корытца проходное сечение увеличено. Кривая может быть строго восходящей по всей ширине поверхности S или может быть сначала восходящей, затем нисходящей, образуя таким образом выступ. Во всех случаях этот выступ является таким, что третья кривая РС-А является более высокой на уровне второй лопатки 3Е, чем на уровне первой лопатки 3I (по причине минимума на уровне первой лопатки 3I), и даже желательно, чтобы третья кривая РС-А имела максимум (общий) на уровне второй лопатки 3Е (следовательно, она является восходящей вблизи второй лопатки 3Е). По сравнению с известной осесимметричной геометрией, которая предполагает наличие «впадины» на входе проточного тракта, то есть нисходящую, затем восходящую кривую, первая геометрия облегчает обдувание передней кромки ВА второй лопатки 3I за счет локального схождения, так как сечение тракта является максимальным в части корытца. Предпочтительно третья кривая РС-А является строго восходящей, так как такой профиль не имеет выступов, которые могут помешать прохождению текучей среды на входе проточного тракта.
Следует отметить, что эта кривая РС-А не ограничивается профилем, в частности, на ее части спинки (важно, чтобы она была восходящей в интервале, ограниченном первой лопаткой 3I, и чтобы ее самая нижняя точка находилась на уровне этой части корытца 3I), даже если в целом более предпочтительным является восходящий профиль.
На фиг. 3b показана первая кривая РС-С. Она является восходящей вблизи второй лопатки 3Е, то есть на уровне спинки проходное сечение уменьшено. Как и первая кривая РС-А, она может быть строго восходящей по всей ширине поверхности S или нисходящей, а затем восходящей и образовать таким образом впадину. Эта кривая РС-С не ограничивается профилем, в частности, на ее части корытца (важно, чтобы она была по меньшей мере восходящей в интервале, ограниченном второй лопаткой 3Е).
Кроме того, желательно, чтобы третья кривая РС-А была ниже первой кривой РС-С вблизи второй лопатки 3Е. Иначе говоря, амплитуда третьей кривой РС-А (по отношению к осесимметричной системе) меньше амплитуды первой кривой РС-С. Это тоже обеспечивает лучшее обдувание второй лопатки 3Е за счет дополнительного схождения.
На фиг. 3с и 3d показаны две возможные категории геометрии для второй кривой РС-F. Во всех случаях вторая кривая должна быть нисходящей вблизи второй лопатки 3Е, чтобы увеличить проходное сечение на уровне спинки.
Желательно, чтобы проходное сечение на уровне корытца было меньше, иначе говоря, чтобы на уровне первой лопатки 3I первая кривая РС-С была меньше второй кривой РС-F. Это обеспечивает лучший контроль за прохождением текучей среды за счет дополнительного схождения на корытце. Это может быть обеспечено за счет того, что, как показано на фиг. 3с, кривая является строго (или почти) нисходящей или альтернативно нисходящей через выступ. Как показано на фиг. 3d, вторая кривая РС-F имеет локальный максимум между корытцем первой лопатки 3I и спинкой второй лопатки 3Е. Этот максимум находится примерно в центральной части кривой. Предпочтительно вторая кривая РС-F является нисходящей, затем восходящей (до выступа) и, наконец, нисходящей. Такая структура с центральным выступом обеспечивает феномен рампы (см. ниже), ограничивающий прохождение текучей среды от корытца к спинке (то есть от первой лопатки 3I ко второй лопатке 3Е).
Наиболее предпочтительные геометрические формы показаны на фиг. 2.
Моделирование поверхности
Образование поверхности при помощи трех кривых построения РС-А, РС-С, РС-F облегчает автоматическую оптимизацию детали 1.
Предпочтительно каждую кривую построения РС-А, РС-С, РС-F моделируют посредством осуществления следующих этапов:
(а) параметризация кривой построения РС-А, РС-С, РС-F как кривой класса С1, отображающей значение радиуса указанной поверхности S в зависимости от положения между корытцем первой лопатки 3I и спинкой второй лопатки 3Е, при этом кривая определена:
- двумя экстремальными контрольными точками соответственно на каждой из двух лопаток 3, 3I, 3Е, между которыми находится указанная поверхность S;
- по меньшей мере одним сплайном;
при этом параметризацию осуществляют по одному или нескольким параметрам, определяющим по меньшей мере одну из экстремальных контрольных точек;
(b) Определение оптимизированных значений указанных параметров указанной кривой.
Эти этапы осуществляют при помощи компьютерной системы, содержащей средства обработки данных (например, сверхмощное вычислительное устройство).
Некоторые параметры экстремальных контрольных точек, в частности, значение производной в этой точке, устанавливают таким образом, чтобы соблюдать вышеупомянутые условия восхождения/нисхождения каждой кривой РС-А, РС-С, РС-F. Можно также включить промежуточные контрольные точки, например, для формирования выступа на второй кривой РС-F.
В качестве критериев, оптимизируемых во время моделирования каждой кривой, можно выбирать самые разные критерии. Например, можно попробовать максимизировать механические свойства, такие как стойкость к механическим напряжениям, частотные характеристики, перемещения лопаток 3, аэродинамические свойства, такие как эффективность, повышение давления, пропускная способность или граница помпажа, и т.д.
Для этого необходимо параметрировать закономерность, которую нужно оптимизировать, то есть сделать из нее функцию N входных параметров. При этом оптимизация состоит в изменении (как правило, случайном) этих различных параметров под напряжением, пока не будут определены их оптимальные значения для заранее определенного параметра. Затем получают «сглаженную» кривую путем интерполяции на основании определенных проходных точек.
Количество необходимых вычислений напрямую связано (случайно и даже экспоненциально) с количеством входных параметров задачи.
Известны многие методы, но предпочтительно применять метод, подобный описанному в патентной заявке FR1353439, который обеспечивает отличное качество моделирования, не прибегая к слишком большим вычислительным мощностям и ограничивая при этом явление Рунге (чрезмерная «волнистость» поверхности).
Следует отметить, что лопатка 3 соединена с площадкой 2 через кривую сопряжения (показана, например, на фиг. 1b), которая может быть объектом специального моделирования, в частности, с использованием также сплайнов и контрольных точек пользователя.
Эффект этих геометрий
Рассмотрим пример поверхности S ступицы детали 1.
На части спинки (вблизи второй лопатки 3Е) поверхность сначала приподнимается на первой части хорды лопатки, затем опускается на второй части.
Получают более сильное схождение (чем, например, при геометрии типа «впадины») на первой части лопатки 3Е, что позволяет локально облегчить отклонение текучей среды. При этом нет общего замыкания сечения и, следовательно, нет общего ускорения текучей среды и нет увеличения потерь при ударе.
На уровне второй (опускающейся) части трехмерный эффект, связанный с подъемом стенки со стороны корытца (или с возможным выступом посередине канала) и с дополнительным схождением в корытце приводит к феномену рампы, помогающему отклонить и контролировать угловые потоки (подъем потока на спинке второй лопатки 3Е).
В случае необходимости, выступ на второй кривой РС-F ограничивает прохождение текучей среды от корытца к спинке, что позволяет лучше контролировать угловые потоки.
Результаты
По сравнению с вычерчиванием контуров лучший контроль потока в канале (лучше контролируемые вторичные потоки, локальные схождения в ключевых зонах) обеспечивает соответствующее повышение эффективности. Тесты показали, что выигрыш составляет от 0,1 до 0,4% от полного КПД компрессора.
Кроме того, новая геометрия дает также выигрыш с точки зрения механики, способствуя контролю сопряжения лопатка/площадка. Максимальное напряжение уменьшается.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТАЛЬ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С НЕОСЕСИММЕТРИЧНОЙ ПОВЕРХНОСТЬЮ | 2014 |
|
RU2672990C1 |
| ДЕТАЛЬ ИЛИ УЗЕЛ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СООТВЕТСТВУЮЩИЙ ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ | 2014 |
|
RU2666933C1 |
| СПОСОБ МОДЕЛИРОВАНИЯ НЕОСЕСИММЕТРИЧНОЙ ПОВЕРХНОСТИ | 2014 |
|
RU2670380C2 |
| ЛОПАТКА ТУРБИНЫ, СОДЕРЖАЩАЯ СИСТЕМУ ОХЛАЖДЕНИЯ | 2017 |
|
RU2741357C2 |
| ЛОПАТКА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ С ПРАВИЛОМ МАКСИМАЛЬНОЙ ТОЛЩИНЫ С БОЛЬШИМ ЗАПАСОМ ПРОЧНОСТИ ПРИ ФЛАТТЕРЕ | 2019 |
|
RU2794951C2 |
| ЛОПАТКА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ, ВЫПОЛНЕННАЯ ПО ПРАВИЛУ ПРОГИБА ПРОФИЛЯ ПЕРА, С БОЛЬШИМ ЗАПАСОМ ПО ФЛАТТЕРУ | 2019 |
|
RU2792505C2 |
| ЛОПАТОЧНЫЙ ДИФФУЗОР РАДИАЛЬНОГО ИЛИ ДИАГОНАЛЬНОГО КОМПРЕССОРА | 2014 |
|
RU2651905C2 |
| ЛОПАТКА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ, ОСНАЩЕННАЯ СИСТЕМОЙ ОХЛАЖДЕНИЯ, И СПОСОБ ИЗГОТОВЛЕНИЯ ТАКОЙ ЛОПАТКИ ПУТЕМ ЛИТЬЯ ПО ВЫПЛАВЛЯЕМЫМ ВОСКОВЫМ МОДЕЛЯМ | 2020 |
|
RU2800619C2 |
| ЛОПАТКА ВЕНТИЛЯТОРА ДЛЯ АВИАЦИОННОГО ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С ИЗОГНУТЫМ ПРОФИЛЕМ В СЕЧЕНИЯХ НОЖКИ | 2013 |
|
RU2639462C2 |
| УЗЕЛ СПРЯМЛЕНИЯ ВОЗДУШНОГО ПОТОКА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И ГАЗОТУРБИННЫЙ ДВИГАТЕЛЬ, СОДЕРЖАЩИЙ ТАКОЙ УЗЕЛ | 2016 |
|
RU2711204C2 |
Объектом изобретения является деталь (1) газотурбинного двигателя, содержащая по меньшей мере первую и вторую лопатки (3, 3I, 3E) и площадку (2), начиная от которой выполнены лопатки (3, 3I, 3E), при этом площадка (2) имеет неосесимметричную поверхность (S), ограниченную первой и второй концевыми плоскостями (PS, PR) и образованную по меньшей мере тремя кривыми построения (РС-А, РС-С, PC-F) класса С1, каждая из которых отображает значение радиуса указанной поверхности (S) в зависимости от положения между корытцем первой лопатки (3I) и спинкой второй лопатки (3Е) по существу в плоскости, параллельной концевым плоскостям (PS, PR), в том числе первой кривой (РС-С), восходящей вблизи второй лопатки (3Е); второй кривой (PC-F), расположенной между первой кривой (РС-С) и задней кромкой (BF) первой и второй лопаток (3, 3I, 3E) и нисходящей вблизи второй лопатки (3Е); третьей кривой (РС-А), расположенной между первой кривой (РС-С) и передней кромкой (ВА) первой и второй лопаток (3, 3I, 3E) и имеющей минимум на уровне первой лопатки (3I). Тесты показали, что выигрыш составляет от 0,1 до 0,4% от полного КПД компрессора. Кроме того, максимальное напряжение уменьшается. 2 н. и 12 з.п. ф-лы, 8 ил.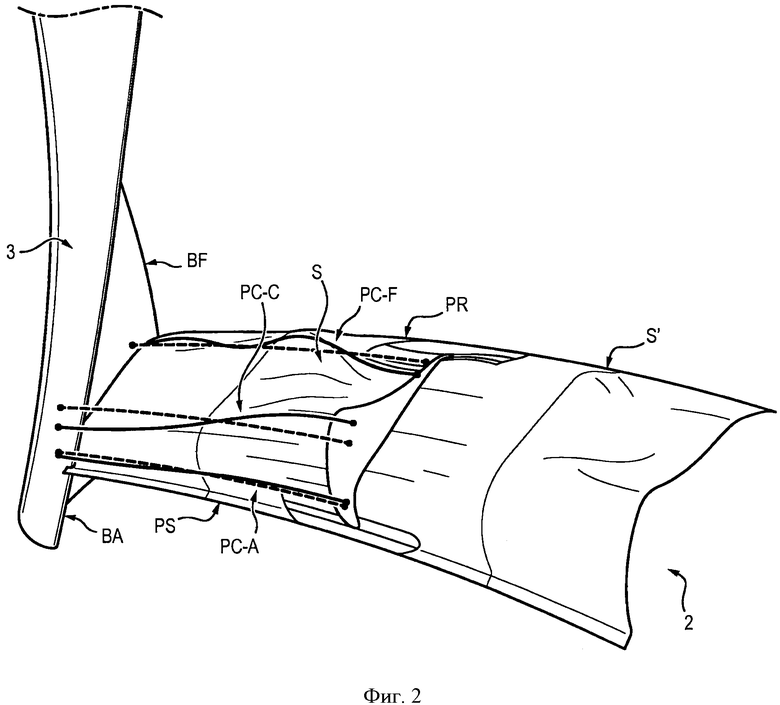
1. Деталь (1) газотурбинного двигателя, содержащая по меньшей мере первую и вторую лопатку (3, 3I, 3Е) и площадку (2), начиная от которой выполнены лопатки (3, 3I, 3Е), отличающаяся тем, что площадка (2) имеет неосесимметричную поверхность (S), ограниченную первой и второй концевыми плоскостями (PS, PR) и образованную по меньшей мере тремя кривыми построения (РС-А, РС-С, РС-F) класса С1, каждая из которых отображает значение радиуса указанной поверхности (S) в зависимости от положения между корытцем первой лопатки (3I) и спинкой второй лопатки (3Е) по существу в плоскости, параллельной концевым плоскостям (PS, PR), в том числе:
- первой кривой (РС-С), восходящей вблизи второй лопатки (3Е);
- второй кривой (РС-F), расположенной между первой кривой (РС-С) и задней кромкой (BF) первой и второй лопаток (3, 3I, 3Е) и нисходящей вблизи второй лопатки (3Е);
- третьей кривой (РС-А), расположенной между первой кривой (РС-С) и передней кромкой (ВА) первой и второй лопаток (3, 3I, 3Е) и имеющей минимум на уровне первой лопатки (3I).
2. Деталь по п. 1, в которой третья кривая (РС-А) является строго восходящей между корытцем первой лопатки (3I) и спинкой второй лопатки (3Е).
3. Деталь по п. 1 или 2, в которой третья кривая (РС-А) ниже первой кривой (РС-С) вблизи второй лопатки (3Е).
4. Деталь по п. 3, в которой первая кривая (РС-С) является строго восходящей между корытцем первой лопатки (3I) и спинкой второй лопатки (3Е).
5. Деталь по одному из пп. 1, 2, 4, в которой вторая кривая (РС-F) имеет локальный максимум между корытцем первой лопатки (3I) и спинкой второй лопатки (3Е).
6. Деталь по одному из пп. 1, 2, 4, в которой каждая кривая построения (РС-А, РС-С, РС-F) определена также положением вдоль хорды лопатки (3I, 3Е), проходящей от передней кромки (ВА) к задней кромке лопатки (3, 3I, 3Е).
7. Деталь по п. 6, в которой первая кривая (РС-С) соответствует положению, находящемуся между 0% и 60% относительной длины хорды лопатки (3, 3I, 3Е), и вторая кривая (РС-F) соответствует положению, находящемуся между 65% и 100% относительной длины хорды лопатки (3, 3I, 3Е).
8. Деталь по п. 7, в которой третья кривая (РС-А) соответствует положению, находящемуся между 0% и 25% относительной длины хорды лопатки (3, 3I, 3Е), и первая кривая (РС-С) соответствует положению, находящемуся между 30% и 60% относительной длины хорды лопатки (3, 3I, 3Е).
9. Деталь по одному из пп. 1, 2, 4, 7, 8, в которой площадка (2) имеет кольцевую форму, вдоль которой равномерно расположено множество лопаток (3I, 3Е).
10. Деталь по п. 9, в которой площадка (2) имеет одинаковую неосесимметричную поверхность (S) между каждой парой последовательных лопаток (3, 3I, 3Е).
11. Деталь по п. 10, являющаяся деталью компрессора газотурбинного двигателя.
12. Деталь по п. 11, являющаяся лопаточным колесом или спрямляющим аппаратом компрессора.
13. Деталь по одному из пп. 1, 2, 4, 7, 8, 10–12, в которой каждая кривая построения (РС-А, РС-С, РС-F) смоделирована при помощи средств обработки данных посредством:
(а) параметризации кривой построения (РС-А, РС-С, РС-F) как кривой класса С1, отображающей значение радиуса указанной поверхности (S) в зависимости от положения между корытцем первой лопатки (3I) и спинкой второй лопатки (3Е), при этом кривая определена:
- двумя экстремальными контрольными точками соответственно на каждой из двух лопаток (3, 3I, 3Е), между которыми находится указанная поверхность (S);
- по меньшей мере одним сплайном;
при этом параметризацию осуществляют по одному или нескольким параметрам, определяющим по меньшей мере одну из экстремальных контрольных точек;
(b) определения оптимизированных значений указанных параметров указанной кривой.
14. Газотурбинный двигатель, содержащий деталь (1) по одному из пп. 1–13.
| US 2011044818 A1, 24.02.2011 | |||
| EP 1762700 A2, 14.03.2007 | |||
| US 2012201692 A1, 09.08.2012 | |||
| ЖЕЛОБЧАТЫЙ КАНАЛ ДЛЯ ПОТОКА В КОМПРЕССОРЕ (ВАРИАНТЫ) | 2001 |
|
RU2232922C2 |

