Область техники
Настоящее изобретение относится к системам автоматизированного проектирования.
В частности, оно относится к способу моделирования неосесимметричной поверхности детали, такой как ступица или кожух.
Уровень техники
Постоянная потребность в улучшении характеристик оборудования, в частности, авиационного оборудования, например, роторов турбореактивных двигателей (то есть узла в виде ступицы, на которой закреплены радиально расположенные лопатки, как показано на фиг. 1а), в настоящее время требует использования компьютерных инструментов моделирования.
Эти инструменты помогают проектировать детали за счет автоматической оптимизации некоторых из ее характеристик посредством выполнения большого числа вычислений моделирования.
Поиск оптимального аэромеханического и/или акустического геометрического решения для роторов в настоящее время привел к получению ступиц, содержащих локально неосесимметричную стенку (в том смысле, что разрез в плоскости, перпендикулярной к оси вращения, не является круглым) на уровне проточного тракта, то есть совокупности каналов между лопатками для прохождения потока текучей среды (иначе говоря, межлопаточных сечений), учитывая особые условия в этой зоне. Неосесимметричный проточный тракт образует в основном кольцевую поверхность трехмерного пространства («срез» ступицы).
Обычно, чтобы оптимизировать характеристику детали, необходимо произвести параметризацию закономерности (то есть построить одну или несколько кривых, описывающих значение физической величины по кривой вдоль детали в данной среде), которую нужно оптимизировать, то есть сделать из нее функцию N входных параметров. При этом оптимизация состоит в изменении (как правило, произвольном) этих различных параметров под напряжением, чтобы определить в конечном счете их оптимальные значения для заранее определенного критерия. Затем получают «сглаженную» кривую путем интерполяции на основании определенных опорных точек.
При этом количество необходимых вычислений напрямую (линейно и даже экспоненциально) связано с количеством входных параметров задачи.
Существует много различных методов параметризации закономерности, в частности, среди них можно выделить две большие категории:
- Дискретная модель: закономерность определяют по положению множества точек, поочередно перемещаемых во время оптимизации;
- Параметрическая модель: закономерность определяют при помощи математических кривых, известных в литературе как кривые Безье или кривые NURBS (неоднородные рациональные В-сплайны).
В конкретном случае неосесимметричных проточных трактов были разработаны специальные методики параметризации. Можно указать семейство так называемых методов с изменением по точкам притяжения на уровне стенки, то есть определение вогнутостей и выпуклостей, которое осуществляют на основании осесимметричной поверхности, и эту стенку выделяют из вогнутостей и выпуклостей.
Альтернативно было предложены так называемые методы с изменением посредством характеризации «сечений». При этом прочерчивают каждое проходное сечение для прохождения текучей среды между двумя лопатками и изменение стенки в зависимости от этих сечений.
Говоря другими словами, производят параметризацию закономерностей по множеству путей прохождения текучей среды между лопатками (возвращаясь к общей вышеупомянутой методике), чтобы определить множество элементарных поверхностей, соответствующее проточному тракту по всему контуру стенки.
Хотя эти методы посредством характеризации сечения представляют интерес с точки зрения аэродинамики, они являются намного более сложными и мало распространенными.
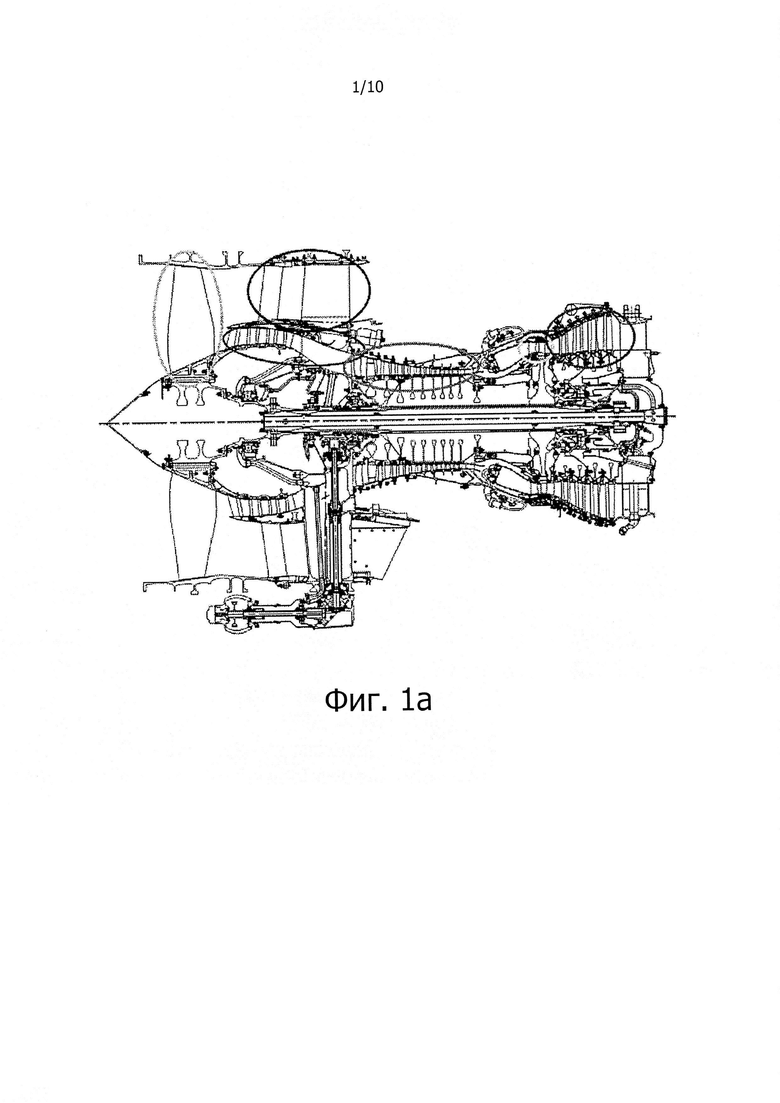
Действительно, как показано на фиг. 1с, которая будет описана ниже, одна из трудностей, вытекающих из этих методов, касается непрерывности между элементарными поверхностями, в частности, на входе и на выходе лопатки. Действительно, сечение может быть не одинаковым на корытце и на спинке лопатки. Это приводит к появлению проблематичной «ступеньки» на входе и на выходе лопаточного колеса.
В настоящее время не существует метода с применением характеризации сечений, который позволяет сохранить нормальную (то есть без какой-либо сингулярности) геометрию с точки зрения аэромеханики.
Поэтому желательно найти новый способ моделирования неосесимметричной поверхности в ее совокупности, отвечающий требованиям непрерывности стенки, соблюдения условий изготовления и дающий пользователю широкий запас маневра в проектировании.
Сущность изобретения
Первым объектом изобретения является способ моделирования по меньшей мере части неосесимметричной поверхности участка детали, при этом участок ограничен первой и второй экстремальными плоскостями, при этом способ отличается тем, что включает в себя осуществление следующих этапов при помощи средств обработки данных устройства:
(a) Моделирование по меньшей мере двух неосесимметричных элементарных поверхностей, образующих указанную поверхность, при этом каждая из элементарных поверхностей расположена между двумя экстремальными плоскостями участка и образована по меньшей мере одной кривой построения, расположенной в плоскости, по существу параллельной экстремальным плоскостям, при этом первая и вторая элементарные поверхности прилегают друг к другу таким образом, что имеют соединение по меньшей мере С1 на уровне экстремальных плоскостей и по меньшей мере один разрыв;
(b) Построение по меньшей мере одной кривой сопряжения класса С1, образованной первой и второй экстремальными точками, соответственно расположенными на первой и второй элементарных поверхностях, при этом указанная кривая сопряжения является касательной к первой и второй поверхности соответственно в первой и второй экстремальной точке;
(c) Локальное изменение первой и второй элементарных поверхностей таким образом, чтобы соблюдать указанную кривую сопряжения вблизи указанного разрыва;
(d) Воспроизведение на интерфейсе указанного устройства указанной по меньшей мере одной части полученной поверхности.
Настоящий способ соответствует методу характеризации сечений, в котором не стремятся избегать разрывов. Наоборот, эти разрывы получают, а затем корректируют, не меняя геометрии неосесимметричной поверхности, таким образом, чтобы сохранить все преимущества этих методов (аэродинамические качества и большой запас маневра) и исключить недостатки (сингулярности).
Кроме того, способ является оптимизированным для максимального повышения качества моделей при одновременном уменьшении требуемой вычислительной мощности.
Согласно другим предпочтительным и не ограничительным признакам:
- на окружности участка детали расположено множество лопаток, при этом каждая элементарная поверхность проходит между двумя лопатками таким образом, что первая и вторая элементарные поверхности расположены по одну и по другую сторону от лопатки, соответственно на корытце и на спинке;
- соединение между первой и второй элементарными поверхностями имеет первый разрыв, проходящий от первой экстремальной плоскости к передней кромке лопатки, и второй разрыва, проходящий от задней кромки лопатки к второй экстремальной плоскости;
- кривую сопряжения строят на этапе (b) для каждого из первого и второго разрывов, при этом каждая кривая сопряжения является касательной к лопатке на уровне задней кромки или передней кромки;
- кривая сопряжения проходит через срединную точку, расположенную на задней кромке или на передней кромке лопатки, таким образом, что расстояние между срединной точкой и первой элементарной поверхностью равно расстоянию между срединной точкой и второй элементарной поверхностью;
- кривая сопряжения является сплайном, полностью образованным экстремальными точками и срединной точкой;
- для каждого из первого и второго разрывов этап (с) включает в себя построение поверхности сопряжения, имеющей в любой точке своего края непрерывность касания с первой или второй элементарной поверхностью;
- каждая элементарная поверхность имеет по меньшей мере одну кривую построения, расположенную между передней кромкой и задней кромкой лопатки, при этом каждая из двух поверхностей сопряжения расположена на каждой из первой и второй элементарных поверхностей от экстремального края до первой кривой построения за пределами кривой сопряжения;
- для каждой кривой построения каждой элементарной поверхности этап (а) включает в себя следующие подэтапы:
(a1) Параметризация кривой построения как кривой класса С1, отображающей значение характеристической физической величины указанной поверхности в зависимости от положения вдоль ширины элементарной поверхности, при этом кривая образована:
- Двумя экстремальными контрольными точками соответственно на каждой из двух лопаток, между которыми расположена указанная элементарная поверхность, определяющими протяженность указанной ширины элементарной поверхности;
- По меньшей мере одним сплайном;
при этом параметризацию осуществляют по одному или нескольким параметрам, определяющим по меньшей мере одну из экстремальных контрольных точек;
(а2) Определение оптимизированных значений указанных параметров указанной кривой.
- каждая кривая построения каждой элементарной поверхности образована также по меньшей мере одной промежуточной контрольной точкой, расположенной между экстремальными точками, и по меньшей мере двумя сплайнами, соединенными на уровне указанной промежуточной контрольной точки; при этом параметризацию осуществляют также по одному или нескольким параметрам, определяющим указанную промежуточную контрольную точку;
- параметр или параметры, определяющие промежуточную или экстремальную контрольную точку, образующую кривую построения, выбирают среди абсциссы точки, ординаты точки, ориентации касательной к кривой в точке и по меньшей мере одного коэффициента натяжения, связанного с полукасательной к кривой на уровне точки;
- коэффициент натяжения, связанный с полукасательной к кривой на уровне промежуточной или экстремальной точки, является функцией значения производной второго порядка кривой вблизи точки;
- каждый сплайн кривой построения является кривой Безье, полностью определяемой контрольными точками, образующими ее концы.
Вторым и третьим объектами изобретения являются способ изготовления детали, участок которой имеет неосесимметричную поверхность, при этом способ включает в себя следующие этапы:
- Осуществление способа, являющегося первым объектом изобретения, чтобы моделировать по меньшей мере часть указанной неосесимметричной поверхности участка детали;
- Изготовление указанной детали в соответствии с моделированием указанной по меньшей мере части полученной поверхности;
а также деталь, участок которой имеет неосесимметричную поверхность и которая получена при помощи способа, являющегося вторым объектом изобретения.
Четвертым объектом изобретения является устройство моделирования по меньшей мере части неосесимметричной поверхности участка детали, при этом участок ограничен первой и второй экстремальными плоскостями, при этом устройство отличается тем, что содержит средства обработки данных, включающие в себя:
- модуль моделирования по меньшей мере двух неосесимметричных элементарных поверхностей, образующих указанную поверхность, при этом каждая из элементарных поверхностей расположена между двумя экстремальными плоскостями участка и образована по меньшей мере одной кривой построения, расположенной в плоскости, по существу параллельной экстремальным плоскостям, при этом первая и вторая элементарные поверхности прилегают друг к другу таким образом, что имеют соединение по меньшей мере С1 на уровне экстремальных плоскостей и по меньшей мере один разрыв;
- модуль построения по меньшей мере одной кривой сопряжения класса С1, образованной первой и второй экстремальными точками, соответственно расположенными на первой и второй элементарных поверхностях, при этом указанная кривая сопряжения является касательной к первой и второй поверхности соответственно в первой и второй экстремальной точке;
- модуль локального изменения первой и второй элементарных поверхностей таким образом, чтобы соблюдать указанную кривую сопряжения вблизи указанного разрыва;
- модуль воспроизведения указанной по меньшей мере одной части полученной поверхности на интерфейсе указанного устройства.
Пятым и шестым объектами изобретения являются соответственно компьютерный программный продукт, содержащий командные коды для исполнения являющегося первым объектом изобретения способа моделирования по меньшей мере части неосесимметричной поверхности участка детали; и средство хранения, которое выполнено с возможностью считывания компьютерным устройством и на котором записанный компьютерный программный продукт содержит командные коды для исполнения являющегося первым объектом изобретения способа моделирования по меньшей мере части неосесимметричной поверхности участка детали.
Описание фигур
Другие отличительные признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания предпочтительного варианта выполнения со ссылками на прилагаемые чертежи, на которых:
Фиг. 1а (уже описана) - пример турбореактивного двигателя, к стенкам которого применяют заявленный способ.
Фиг. 1b-1с - детальный вид неосесимметричного проточного тракта.
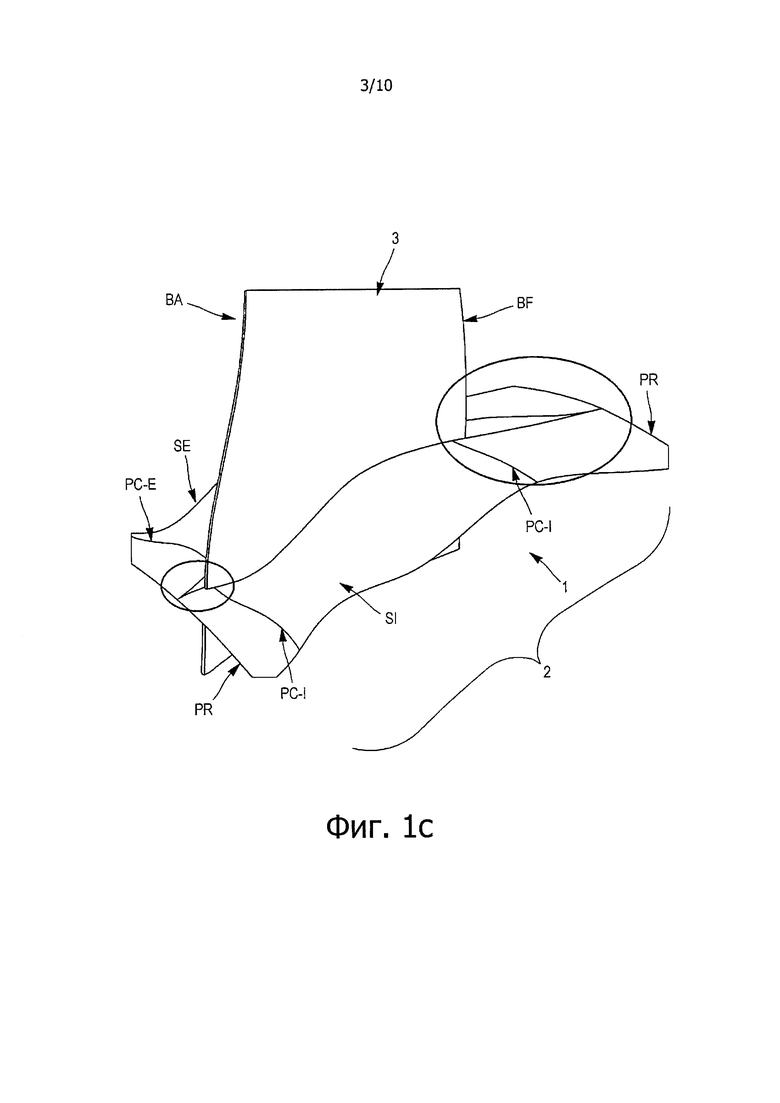
Фиг. 2 - система для осуществления заявленного способа.
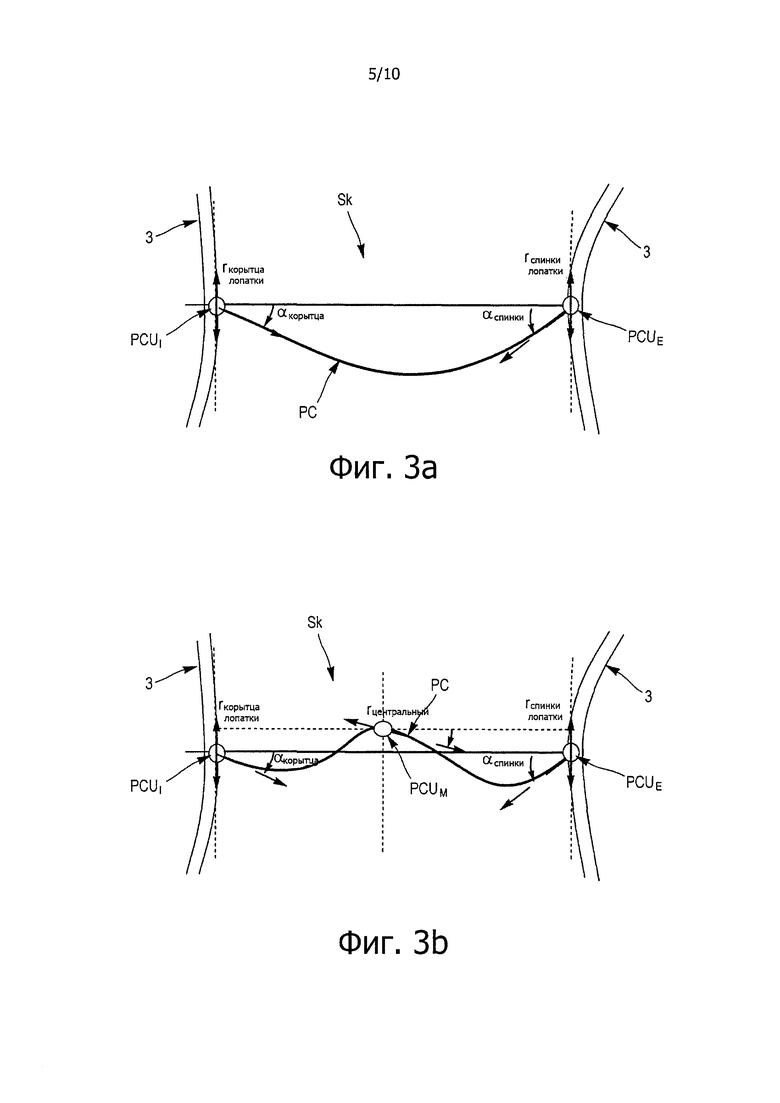
Фиг. 3a-3b - два примера кривых построения элементарной поверхности, используемых в рамках заявленного способа.
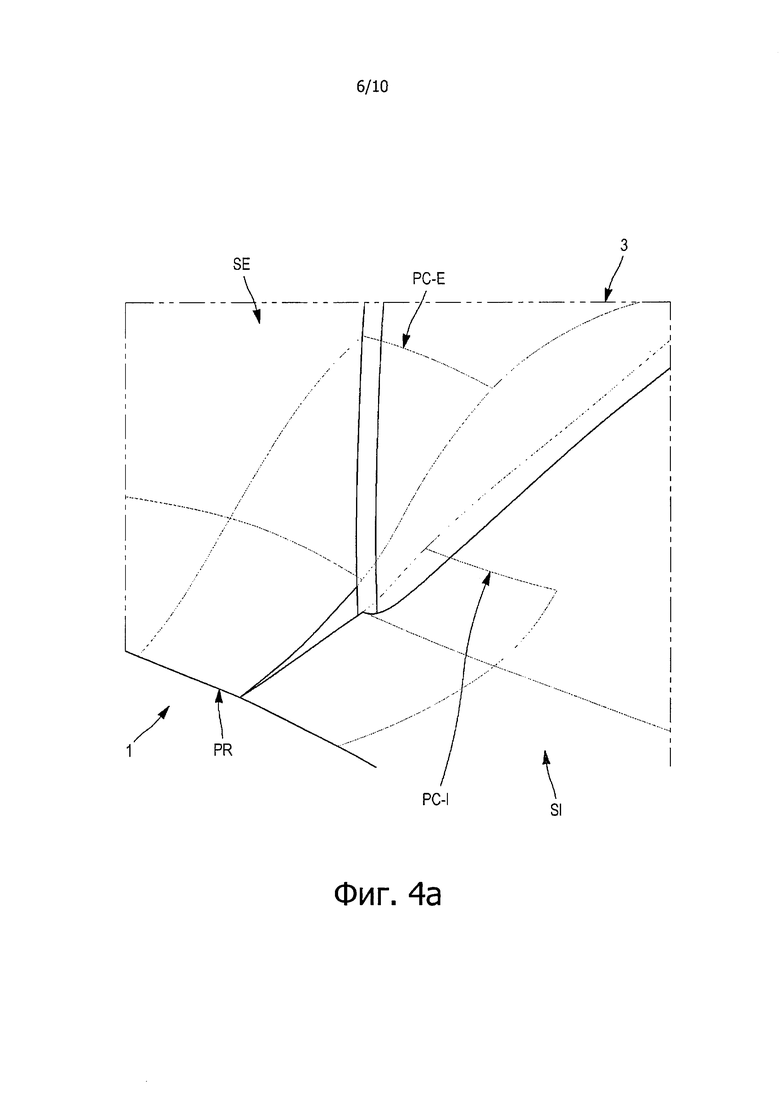
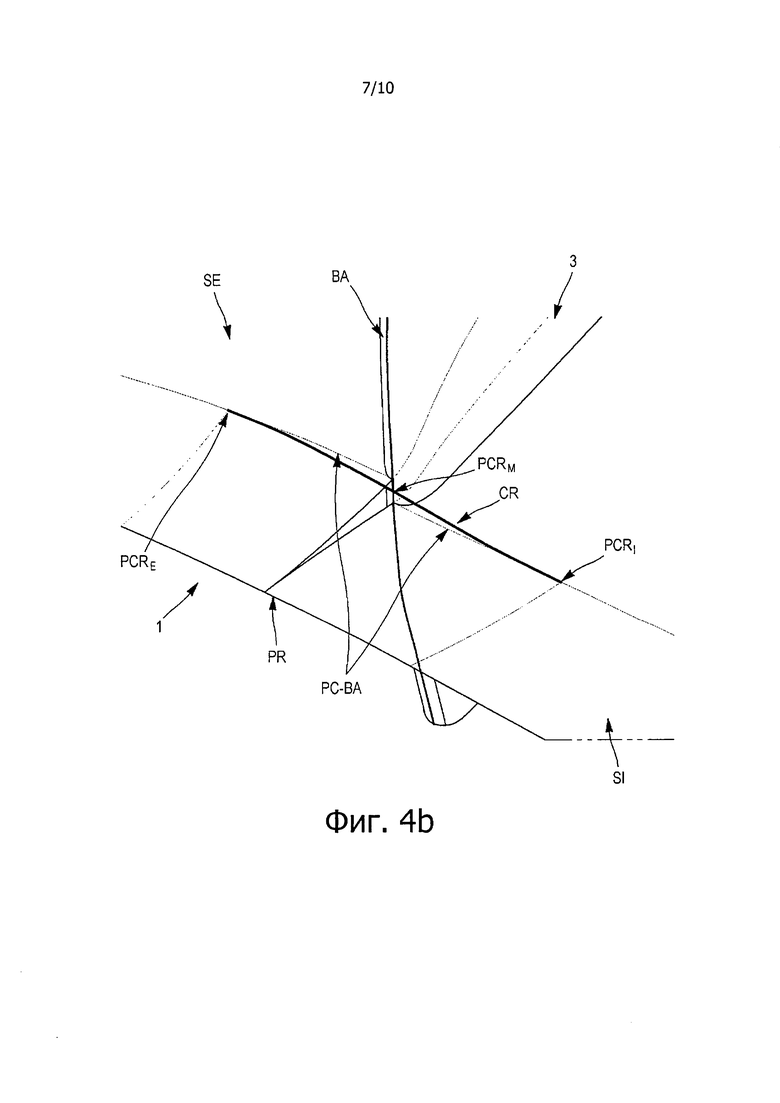
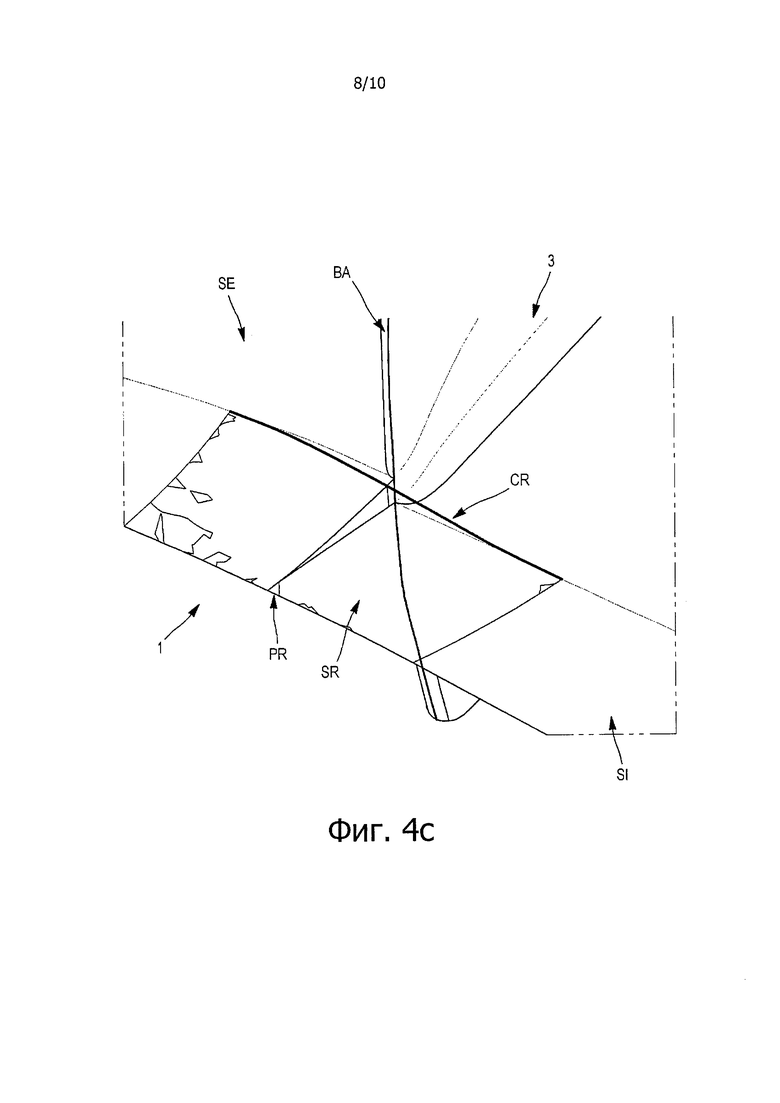
Фиг. 4a-4d - построение поверхности сопряжения на уровне передней кромки.
Фиг. 5 - кривая сопряжения, используемая в рамках заявленного способа.
Подробное описание
Настоящий способ предназначен для моделирования по меньшей мере части неосесимметричной поверхности участка детали. Эта деталь может быть ступицей или картером и, в целом, любой деталью турбореактивного двигателя, имеющей неосесимметричную стенку, вдоль которой циркулирует воздух. На уже описанной выше фиг. 1 (где показан турбореактивный двигатель CFM-56) можно указать следующие зоны (которые очерчены для облегчения их локализации):
- Вентилятор
- OGV ("Outlet Gide Vane", то есть лопатки, спрямляющие поток второго контура) + вторичная стойка
- Бустер + первичная стойка
- Компрессор высокого давления
- Турбина высокого давления
- Турбина низкого давления.
В дальнейшем тексте настоящего описания будет рассмотрен пример моделирования ступицы на уровне компрессора высокого давления (третья очерченная зона, считая слева или справа), однако специалист в данной области может транспонировать его на любую другую деталь турбореактивного двигателя.
На фиг. 1b показана эта ступица 1 и, в частности, неосесимметричный участок 2, ограниченный на входе первой экстремальной плоскостью, называемой «Плоскостью разделения» PS, и на выходе второй экстремальной плоскостью, называемой «Плоскостью сопряжения» PR. Следует отметить, что ступица может содержать множество участков 2 (например, в случае нескольких рядов лопаток), которые могут быть разделены осесимметричными зонами.
Участок 2 имеет поверхность S, образующую форму по существу в виде тора, по меньшей мере часть которой моделируют при помощи настоящего способа.
Как было указано выше, этот способ использует так называемые методы с изменением при помощи характеризации «сечений». Этот способ предлагает новое решение проблем непрерывности: вместо того, чтобы любой ценой избегать разрывов между двумя сечениями, способ, наоборот, не препятствует их появлению, но затем устраняет их, используя кривые сопряжения, которые будут описаны ниже.
Моделируемая часть поверхности S содержит по меньшей мере две элементарные поверхности (на фиг. 1а можно насчитать четыре элементарные поверхности, обозначенные Sk, где k∈[1; 4]), которые моделируют отдельно путем построения по меньшей мере одной кривой построения, называемой также «Плоскостью построения», на первом этапе (а), который будет описан ниже (на фиг. 1а три кривые построения PC-k образуют первую из элементарных поверхностей Sk).
Каждая из этих элементарных поверхностей имеет по существу прямоугольную форму и расположена между двумя экстремальными плоскостями PS, PR участка 2. Таким образом, поверхность S воспроизводят в виде множества прилегающих друг к другу полос.
Две соседние элементарные поверхности Sk и Sk+1 имеют отдельную границу. Как показано на фигурах, первая и вторая соседние элементарные поверхности прилегают друг к другу таким образом, что имеют соединение по меньшей мере С1 на уровне экстремальных плоскостей PS, PR. Иначе говоря, пересечение между ступицей 1 и каждой из плоскостей PR и PS образует непрерывную кривую с непрерывной производной (эта кривая замкнута и образует петлю), которые следуют элементарным поверхностям на уровне своих концов, отсюда непрерывность значения и производной на уровне точек прилегания.
Между двумя концами край, «общий» для двух прилегающих элементарных поверхностей, имеет по меньшей мере один разрыв, то есть точку, в которой элементарные поверхности отделены друг от друга.
При более формальном подходе, определяя цилиндрическую систему координат с центром на оси ступицы 1 (любая точка поверхности ступицы определена триплетом (r, θ, z), где r является радиусом, то есть расстоянием между точкой стенки и осью ступицы, θ является углом на окружности ступицы, и z является положение вдоль оси ступицы), получаем следующее:
Участок 2 может быть определен как {(r, θ, z), z∈[zS, zR]};
PS и PR можно определить соответственно как {(r, θ, z), r=rS, z=zS} и {{r, θ, z), r=rR, z=zR};
Элементарную поверхность Sk можно определить уравнением {{rk(θ, z), θ, z), z∈[zs, zR], θ∈[θk, θk+1], rk(θ, zS)=rs, rk(θ, zR)=zR}, при котором ∃z∈]zs, zR[, rk(θ, z)≠rk+1(0k, z), что и определяет точку разрыва.
Как правило, этот разрыв проверяется на всем открытом интервале ]zs, zR[ (иначе говоря, на PR и PS наблюдается только одна непрерывность).
Как показано, в частности, на фиг. 1b, через стенку ступицы 1 проходят лопатки (то есть лопасти). Эта лопатки 2, расположенные равномерно или не равномерно (в этом втором случае можно произвести масштабирование) на окружности стенки 2, проходят в радиальном направлении.
Предпочтительно получают чередование лопаток и элементарных поверхностей. Иначе говоря, каждая элементарная поверхность расположена между двумя лопатками, то есть с каждой стороны лопатки расположена одна элементарная поверхность.
Одной из сторон является спинка лопатки, а другой - ее корытце. Таким образом, для данной лопатки 3 (показанной на фиг. 1b) можно определить элементарную поверхность корытца SI и элементарную поверхность спинки SE, которые является двумя прилегающими друг к другу элементарными поверхностями. Кроме того, отмечают кривые построения PC-I и РС-Е каждой из этих двух элементарных поверхностей SI, SE. Точно так же, данная элементарная поверхность одновременно является элементарной поверхностью корытца SI находящейся рядом лопатки и элементарной поверхностью спинки SE находящейся рядом лопатки.
Кроме того, понятно, что можно моделировать любую элементарную поверхность Sk как совокупность двух «полуповерхностей», каждая из которых расположена на половине ширины проточного тракта. Таким образом, «правая» полуповерхность играет роль поверхности спинки находящейся рядом лопатки, и «левая» играет роль поверхности корытца другой соседней лопатки. Вместе с тем, это является лишь условностью отображения среди прочих и ничего не меняет в осуществлении способа.
В дальнейшем будет рассмотрен простой случай лопатки 3, окруженной двумя прилегающими друг к другу элементарными поверхностями: первая из них является элементарной поверхностью спинки SE лопатки, а вторая - элементарной поверхностью корытца SI лопатки.
Лопатка 3 занимает основную часть соединения, но оставляет первый «передний» разрыв, проходящий от первой экстремальной плоскости PS к передней кромке ВА лопатки 2, и второй разрыв, проходящий от задней кромки BF лопатки 2 к второй экстремальной плоскости PR.
Настоящий способ обеспечивает построение поверхности сопряжения SR для каждого из первого и второго разрывов (поверхности SR, которые показаны на фигурах и которые будут описаны ниже).
В целом, часть поверхности S модулируют в рамках настоящего способа во время ее проектирования при помощи компьютерного устройства 10, показанного на фиг. 2. Оно содержит средства 11 обработки данных (один или несколько процессоров), средства 12 хранения данных (например, один или несколько жестких дисков), средства интерфейса 13 (представляющие собой средства ввода, такие как клавиатура и мышь или сенсорный интерфейс) и средства воспроизведения (такие как экран для выведения результатов). Предпочтительно устройство 10 представляет собой суперкомпьютер, но понятно, что вполне возможно осуществлять способ на самых разных платформах.
Моделирование элементарных поверхностей
Первая часть (а) настоящего способа включает в себя моделирование элементарных поверхностей Sk, SI, SE независимо друг от друга. Следует отметить, что при предпочтительном (но не ограничительном) предположении о периодичности в окружности ступицы (то есть, что лопатки 3 являются идентичными и равномерно распределены) все элементарные поверхности будут идентичными, и достаточно моделировать одну из них, чтобы затем ее продублировать.
Принцип состоит в определении аэромеханического и/или акустического геометрического оптимума закономерностей элементарной поверхности, иначе говоря, одной или нескольких кривых, описывающих значение физической величины (в частности, радиуса, то есть расстояния от точки элементарной поверхности до центра ступицы) вдоль ширины элементарной поверхности (как было указано выше, элементарная поверхность Sk образована своими кривыми построения РС-k, каждая из которых расположена в плоскости, по существу параллельной экстремальным плоскостям PS, PR участка 2) в данной среде, посредством исполнения большого числа вычислений моделирования.
В качестве критериев, оптимизируемых во время моделирования элементарной поверхности, можно выбрать самые разные критерии. Например, можно максимизировать механические свойства, такие как стойкость к механическим напряжениям, частотные характеристики, перемещения лопаток 3, аэродинамические свойства, такие как аэродинамическое качество, повышение давления, пропускающая способность или граница помпажа и т.д.
Для этого необходимо осуществить параметризацию оптимизируемой закономерности, то есть сделать из нее функцию N входных параметров. При этом оптимизация состоит в варьировании (как правило, произвольном) этих различных параметров под напряжением вплоть до определения их оптимальных значений для заранее определенного критерия. Затем получают «сглаженную» кривую путем интерполяции на основании определенных опорных точек.
При этом количество необходимых вычислений напрямую (линейно и даже экспоненциально) связано с числом входных параметров задачи.
Известны многие методы, но предпочтительно применять метод, аналогичный описанному в патентной заявке FR 1353439, который обеспечивает отличное качество моделирования без повышенного потребления вычислительной мощности и с одновременным ограничением феномена Рунге (чрезмерной «осцилляции» поверхности).
В целом, для каждой кривой построения PC-k, PC-I, РС-Е каждой элементарной поверхности Sk, SI, SE способ включает в себя следующие подэтапы:
(a1) Параметризация кривой построения как кривой класса С1, отображающей значение характеристической физической величины указанной поверхности S (как правило, радиуса) в зависимости от положения вдоль ширины элементарной поверхности Sk, SI, SE, при этом кривая образована:
- Двумя экстремальными точками PCUI, PCUE (сокращение от «контрольная точка пользователя») соответственно на корытце и спинке указанной ширины элементарной поверхности Sk, SI, SE;
- По меньшей мере одним сплайном;
при этом параметризацию осуществляют по одному или нескольким параметрам, определяющим по меньшей мере одну из экстремальных контрольных точек PCUI, PCUE;
(а2) Определение оптимизированных значений указанных параметров указанной кривой.
Первый подэтап (a1) осуществляют при помощи средств 11 обработки данных под управлением оператора.
Положение вдоль ширины элементарной поверхности Sk, SI, SE выражают в зависимости от длины кривой (по абсциссе) и, в частности, «нормализованной» длины хорды, то есть выраженной от 0 до 1, когда пересекают элементарную поверхность Sk, SI, SE, иначе говоря, когда переходят от одной лопатки 3 к другой. Необходимо отметить, что, как было указано выше, элементарная поверхность Sk, SI, SE находится на уровне корытца одной из этих двух лопаток 3 и на уровне спинки другой лопатки, поэтому путь соответствует переходу корытце-спинка.
Вместе с тем, понятно, что изобретение ни в коем случае не ограничивается выражением кривой, отображающей значение величины в зависимости от ширины, и что возможны и другие точки отсчета.
Эту кривую, отображающую значение физической величины, следует понимать как моделирование закономерности этой физической величины (в связи с этим ее можно назвать «кривой моделирования», чтобы отличать ее от кривых Безье с точки зрения терминологии). Указанная физическая величина может быть любой величиной, имеющей аэромеханическое и/или акустическое значение для проектирования элементарных поверхностей Sk, SI, SE, но, как правило, речь идет о вышеупомянутом радиусе.
Кривая моделирования является кривой класса не менее С1, то есть она соответствует непрерывной функции по меньшей мере с 1-й непрерывной производной на ограничивающем ее пространстве (ширина элементарной поверхности). Ниже будет показано значение этого условия. На практике, полученной кривой является С∞ по кускам (бесконечно дифференцируемые функции на каждом интервале) с непрерывностью кривой и производной на уровне возможных сопряжений (промежуточные контрольные точки, которые будут определены). Понятно, что речь идет о минимальных условиях и что кривая может вполне быть, например, С∞ на всем пространстве ее образования.
Кривую образуют, благодаря ее контрольным точкам. Как показано на фиг. 3а, где представлен первый пример моделирования, фиксируют две экстремальные контрольные точки пользователя PCUI и PCUE (которые являются соответственно контрольными точками «Корытце» и «Спинка» в зависимости от стороны лопатки 3, на уровне которой они находятся), которые определяют протяженность элементарной поверхности (то есть область образования кривой).
Кривая моделирования содержит по меньшей мере один сплайн, который связывает эти экстремальные точки. Сплайны являются параметрическими полиномиальными кривыми, среди которых предпочтительно можно указать кривые Безье, определяемые как комбинации из N+1 элементарных многочленов, называемых многочленами Бернштейна: кривую Безье определяют по совокупности точек 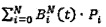 , t∈[0, 1], при этом
, t∈[0, 1], при этом  являются многочленами Бернштейна степени N.
являются многочленами Бернштейна степени N.
Точки {Р0, P1…PN} называются «имплицитными» контрольными точками кривой и представляют собой переменные, благодаря которым при помощи кривой Безье можно моделировать закономерность элементарной поверхности.
Эти точки называются «имплицитными», так как кривую Безье можно рассматривать как совокупность барицентров N+1 контрольных точек с весовым коэффициентом, равным значению многочлена Бернштейна, связанного с каждой контрольной точкой. Иначе говоря, эти точки действуют как локализованные точки, притягивающие кривую, которая, тем не менее, как правило, через них не проходит (кроме первой и последней точек, которые соответствуют t=0 и t=1, и некоторых случаев выравнивания точек в линию).
Как правило, в известных технологиях моделирования закономерности с использованием кривой Безье, экстремальные контрольные точки Р0 и PN кривой являются фиксированными (они определяют протяженность, на которой будут производить моделирование), но другие точки {Р1…PN-1} имеют подвижные координаты, образующие входные параметры для алгоритма оптимизации.
В рамках настоящего способа предпочтительно между этими двумя экстремальными точками PCUI и PCUE расположена одна (и даже несколько) промежуточная контрольная точка пользователя PCUM (от "Milieu" - середина).
Этот случай представлен на фиг. 3b. Промежуточная точка или промежуточные точки являются «эксплицитными», а не имплицитными контрольными точками, так как через них проходит кривая. Действительно, эта кривая содержит в этом случае по меньшей мере два сплайна, соединенных на уровне указанной промежуточной точки.
В варианте выполнения кривая моделирования может состоять только из последовательности кривых Безье, каждая из которых проходит между экстремальной контрольной точкой PCUI, PCUE и промежуточной точкой PCUM или между двумя промежуточными точками PCUM.
Иначе говоря, все контрольные точки пользователя PCUI, PCUN, PCUE (экстремальные или промежуточные) кривой являются экстремальными контрольными точками Р0, PN кривой Безье.
Тот факт, что кривая является кривой класса С1, предполагает, что каждая промежуточная точка PCUM обеспечивает непрерывность, в том числе на производной (даже касательной).
Обработка позволяет произвести параметризацию кривой моделирования в зависимости от параметров экстремальных (и, возможно, промежуточных) точек, определяющих концы сплайнов, образующих кривую моделирования плоскости построения PC-k, PC-I, РС-Е.
В частности, если сплайны являются кривыми Безье, каждый из них может полностью определяться точками PCU, образующими его концы. Иначе говоря, параметры точек PCU (с точки зрения координат и производных) служат условиями пределов при вычислении при помощи средств 11 обработки данных координат имплицитных контрольных точек различных кривых Безье, которые выбирают с минимальной степенью, достаточной для соблюдения предельных условий. При этом этап (a1) содержит определение имплицитных точек кривых Безье в зависимости от параметров точек PCU, образующих их концы.
Параметр или параметры, определяющие контрольную точку PCU, выбирают среди абсциссы точки, ординаты точки, ориентации касательной к кривой на уровне точки и одного (в случае экстремальной контрольной точки PCUI, PCUE: в расчет можно брать только полукасательную в области определения кривой слева для PCUE и справа для PCUI) или двух (в случае промежуточной контрольной точки PCUM) коэффициентов натяжения, каждый из которых связан с полукасательной к кривой на уровне точки.
Учитывая, что кривая имеет класс С1 (непрерывная производная), ориентация касательной должна быть одинаковой с одной и с другой стороны от промежуточной точки PCUM. Вместе с тем, «длина» двух полукасательных может быть разной с одной и с другой стороны от точки, и она выражает стремление каждой кривой Безье с одной и с другой стороны от точки «примкнуть» к касательной. Именно это и моделируют вышеупомянутые «коэффициенты натяжения».
Говоря более конкретно, каждый коэффициент натяжения, связанный с полукасательной к кривой на уровне промежуточной точки, зависит от значения производной второго порядка кривой вблизи точки. Действительно, значение производной второго порядка вблизи контрольной точки выражает «скорость», с которой кривая отходит от касательной.
Поскольку кривая моделирования не обязательно имеет класс С, это способствует появлению разрывов производной второго порядка на уровне промежуточных точек.
Необходимо отметить, что не обязательно реально использовать все упомянутые выше параметры. Действительно, в большинстве случаев один или несколько из этих параметров (абсцисса точки, ордината точки, ориентация касательной на уровне точки и два коэффициента натяжения, каждый из которых связан с полукасательной к кривой на уровне точки) имеют заранее определенное значение, установленное пользователем, и, следовательно, их не используют в качестве «переменных» для продолжения способа.
На втором подэтапе (а2) способ включает в себя определение при помощи средств 11 обработки данных оптимизированных (и по возможности оптимальных) значений указанных параметров указанной кривой. Речь идет об этапе оптимизации.
Специалисту в данной области известны многие технологии для осуществления этого этапа, например, можно просто псевдослучайно менять выбранные переменные параметры, одновременно осуществляя моделирование, для определения этих оптимизированных значений (то есть, значений, при которых выбранный критерий максимизирован) параметров контрольных точек PCU. Вместе с тем, изобретение не ограничивается этой возможностью.
После определения значений параметров средства 11 обработки получают уравнение кривой построения PC-k, PC-I, РС-Е и полностью воспроизводят элементарную поверхность Sk, SI, SE (используя уравнения экстремальных плоскостей PS, PR).
В случае необходимости, этап повторяют для моделирования различных элементарных поверхностей Sk, SE, SI (в альтернативном варианте можно считать, что все элементарные поверхности являются идентичными, и просто транспонировать полученное моделирование).
Кривая сопряжения
После моделирования (этап (а)) первой элементарной поверхности SE и второй элементарной поверхности SI получают состояние, показанное на фиг. 4а. Отмечается присутствие первого «переднего» разрыва. В дальнейшем тексте описания будет рассмотрен пример обработки только этого первого разрыва, но, разумеется, специалист может осуществлять эти же этапы на уровне второго «заднего» разрыва.
Следует отметить, что передняя ВА и задняя BF кромки в данном случая являются «реальными» кромками (то есть точками, которые реально находятся спереди и сзади лопатки 3), которые иногда отличаются от теоретических кромок (которые повторяют скелет лопатки). Например, с учетом кривизны лопатки, как правило, передняя кромка ВА смещена в сторону корытца.
Реальные кромки BA, BF появляются естественным образом при построении во время осуществления настоящего способа. Например, если посмотреть на фиг. 4а, то для каждой из элементарных поверхностей SE, SI отмечается точка пересечения с передней кромкой лопатки 3 на уровне конца разрыва. Эти две точки определяют реальную переднюю кромку ВА, показанную на фиг. 4b. Соответствующие кривые элементарных поверхностей SE, SI обозначены РС-ВА на этой фигуре.
Действительно, «реальная» кромка ВА соответствует линии отражения, то есть кривой, нормаль которой к поверхности (лопатки 3) имеет в каждой точке одинаковый угол относительно определенного направления, в данном случае направления соединения между двумя элементарными поверхностями SE, SI.
Этот учет реальных кромок ВА, BF обеспечивает автоматическую коррекцию погрешностей, связанных с экстраполяцией скелета лопатки 3, и облегчает осуществление следующего этапа настоящего способа.
На этом этапе (b) строят по меньшей мере одну кривую сопряжения CR класса С1, образованную первой и второй экстремальными точками PCRI, PCRE (контрольные точки сопряжения»), соответственно расположенными на первой и второй элементарной поверхности Sk, SI, SE.
Как правило, каждая экстремальная точка находится на срединной линии элементарной поверхности SE, SI, при этом обе точки проходят через плоскость, параллельную плоскостям PR, PS, таким образом, что кривая сопряжения является касательной к лопатке 3 на уровне передней кромки ВА (соответственно задней кромки BF).
Кроме того, кривая сопряжения CR является касательной к первой и второй поверхности SE, SI соответственно в первой и второй экстремальной точке PCRI, PCRE. Поучают кривую CR, показанную на фиг. 4b.
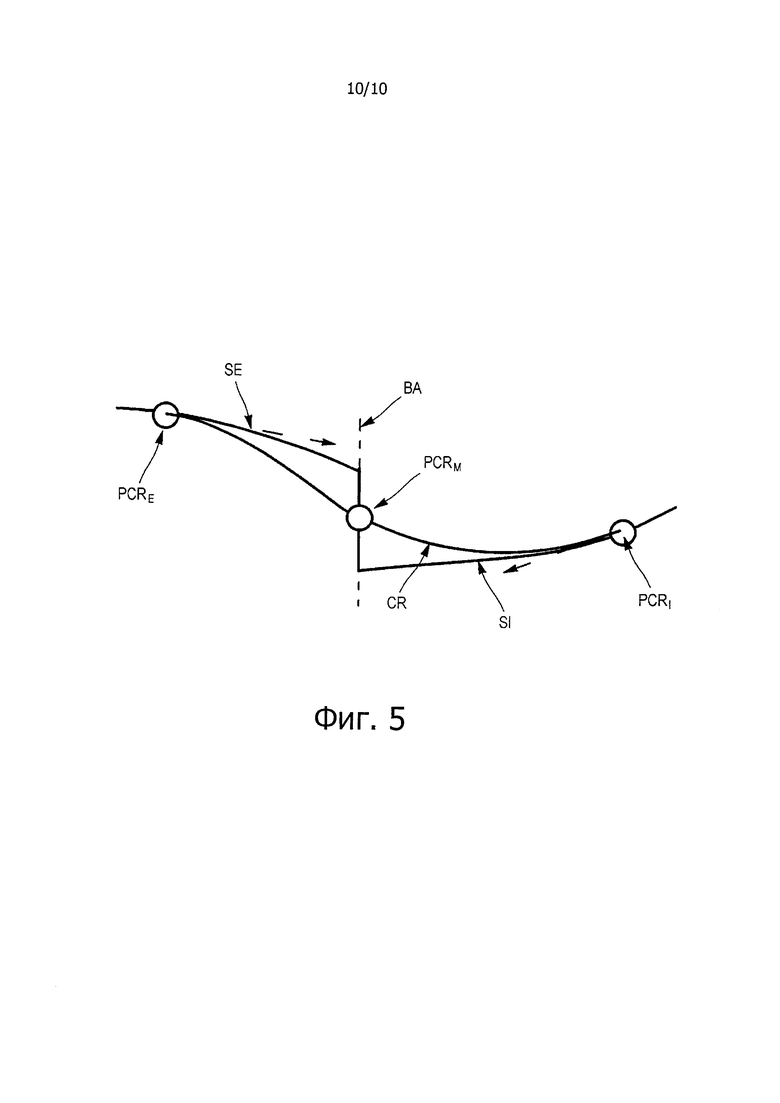
Предпочтительно кривая сопряжения CR проходит через срединную точку PCRM, расположенную на передней кромке ВА (соответственно на задней кромке BF) лопатки 3, таким образом, что расстояние между срединной точкой PCRM и первой элементарной поверхностью SE равно расстоянию между срединной точкой PCRM и второй элементарной поверхностью SI.
На фиг. 5 это показано более наглядно: срединная точка PCRM является серединой ступеньки между первой и второй элементарными поверхностями SE, SI. Здесь же отмечается также соблюдение касательных.
Можно использовать самые различные кривые сопряжения CR, удовлетворяющие этим условиям, но предпочтительно этой кривой сопряжения является один или несколько сплайнов (и даже кривых Безье), полностью образуемых экстремальными точками PCRI, PCRE и срединной точкой PCRM аналогично тому, что используют для моделирования плоскостей построения PC-I, РС-Е (см. выше).
Поверхность сопряжения
Средства 11 обработки данных используют кривую сопряжения CR для образования более протяженной поверхности, называемой поверхностью сопряжения SR, которая перекрывает разрыв. Так, на этапе (с) способ включает в себя локальное изменение первой и второй элементарных поверхностей Sk, SI, SE, чтобы соблюсти указанную кривую сопряжения вблизи указанного разрыва.
В случае первого и второго переднего и заднего разрыва этот этап включает в себя построение поверхности сопряжения SR, которая в любой точке своего края имеет непрерывность касания с первой или второй элементарной поверхностью Sk, SI, SE. Поверхность сопряжения SR локально заменяет элементарные поверхности.
Как показано на фиг. 4с, этот этап прежде всего включает в себя построение первой половины поверхности сопряжения SR, которая проходит от экстремального края PR, PS участка 2 до кривой построения CR. Уравнение каждого из краев этой половины поверхности известно (в случае по существу прямоугольной формы, показанной на фиг. 4с, четыре стороны определяются соответственно уравнением SI, уравнением PR, уравнением SE и уравнением CR). Что касается внутреннего пространства этой поверхности, можно применять любую «нормальную» геометрию (непрерывную, дифференцируемую или геометрию простой формы).
При достижении этой точки по-прежнему существует разрыв между поверхностью сопряжения SR и элементарными поверхностями SE, SI на уровне кривой сопряжения.
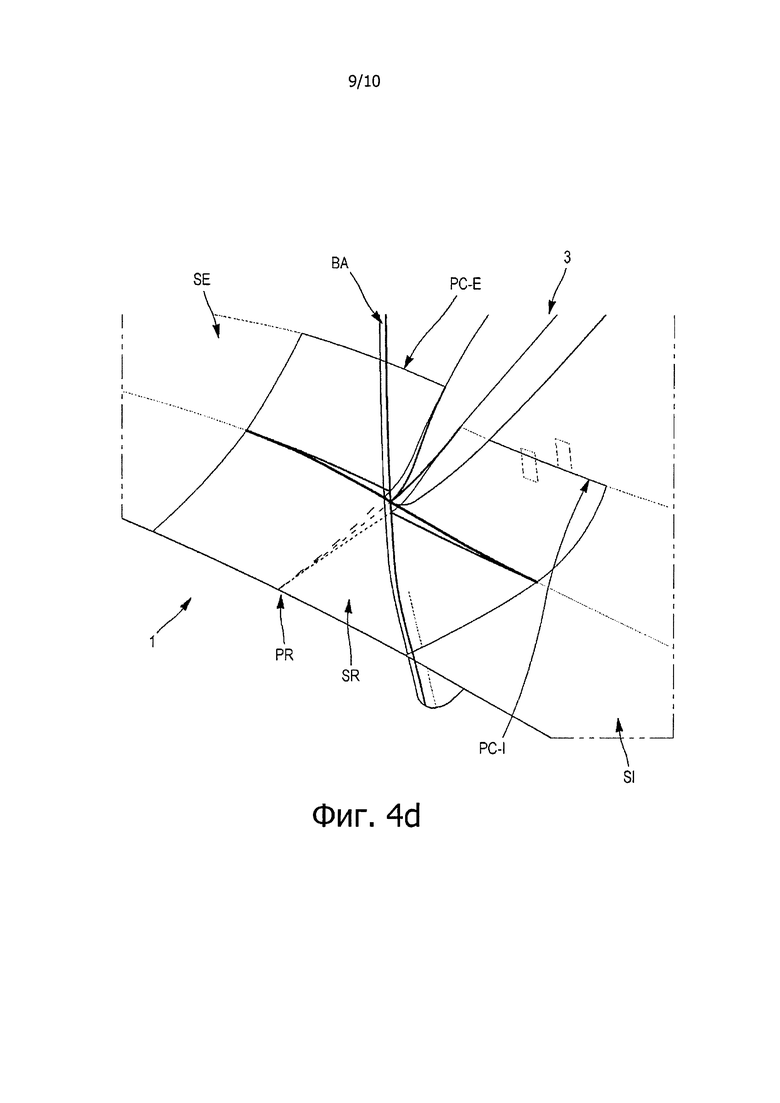
В этом случае достаточно продлить поверхность сопряжения SR вдоль лопатки 3, в частности, до кривой построения PC-I, РС-Е каждой из элементарных поверхностей SE, SI (достаточно, чтобы каждая элементарная поверхность SE, SI имела по меньшей мере одну кривую построения PC-k, PC-I, РС-Е, расположенную между передней кромкой ВА и задней кромкой BF лопатки 3 (иначе говоря, в другом месте, а не на уровне разрыва), чтобы поверхность сопряжения SR доходила до первой кривой построения PC-I, РС-Е за пределами кривой сопряжения CR), как показано на фиг. 4d. Поверхность сопряжения SR продолжает соблюдать в любой точке своего края непрерывность касания.
При этом поверхность сопряжения SR принимает форму U вокруг передней кромки ВА (или задней кромки BF) лопатки 3. Система, образованная элементарными поверхностями SE, SI и поверхностями сопряжения SR, полностью является С1 и соблюдает скелет лопатки 3. Она образует часть моделированной неосесимметричной поверхности S.
На последнем этапе (d) интерфейсные средства 13 устройства 10 воспроизводят полученную модель поверхности S для ее использования, например, путем вывода на экран поверхностей в трех измерениях или их уравнений.
Способ изготовления и деталь
После моделирования поверхности S можно изготовить деталь 1 (которая, как было указано выше, может быть, в частности, ступицей или картером турбореактивного двигателя). Таким образом, изобретением предложен способ изготовления детали, участок которой содержит неосесимметричную поверхность, при этом способ содержит следующие этапы:
- Осуществление способа, являющегося первым объектом изобретения, для моделирования по меньшей мере части указанной неосесимметричной поверхности участка детали;
- Изготовление указанной детали в соответствии с моделированием указанной по меньшей мере части полученной поверхности.
Полученная таким образом деталь (участок которой содержит неосесимметричную поверхность, моделированную при помощи вышеуказанного способа) имеет более правильную и более качественную геометрию, чем известные детали. Она может иметь повышенную прочность, лучшие аэродинамические свойства, пониженные уровни шума и т.д.
Устройство
Устройство 10 (показанное на фиг. 2) для осуществления способа моделирования по меньшей мере части неосесимметричной поверхности S участка 2 детали 1 содержит средства 11 обработки данных, которые включают в себя:
- модуль моделирования по меньшей мере двух неосесимметричных элементарных поверхностей Sk, SI, SE, образующих указанную поверхность S, при этом каждая из элементарных поверхностей Sk, SI, SE расположена между двумя экстремальными плоскостями PS, PR участка 2 и образована по меньшей мере одной кривой построения PC-k, PC-I, РС-Е, расположенной в плоскости, по существу параллельной экстремальным плоскостям PS, PR, при этом первая и вторая элементарные поверхности Sk, SI, SE прилегают друг к другу таким образом, что имеют соединение по меньшей мере С1 на уровне экстремальных плоскостей PS, PR и по меньшей мере один разрыв;
- модуль построения по меньшей мере одной кривой сопряжения CR класса С1, образованной первой и второй экстремальными точками PCRI, PCRE, соответственно расположенными на первой и второй элементарных поверхностях Sk, SI, SE, при этом указанная кривая сопряжения CR является касательной к первой и второй поверхности соответственно в первой и второй экстремальной точке PCRI, PCRE;
- модуль локального изменения первой и второй элементарных поверхностей Sk, SI, SE таким образом, чтобы соблюдать указанную кривую сопряжения CR вблизи указанного разрыва;
- модуль воспроизведения на интерфейсе 13 указанного устройства 10 указанной по меньшей мере одной части полученной поверхности.
Компьютерный программный продукт
Другими объектами изобретения являются компьютерный программный продукт, содержащий командные коды для исполнения (на средствах 11 обработки данных, в частности, на средствах устройства 10) являющегося первым объектом изобретения способа моделирования по меньшей мере части неосесимметричной поверхности S участка 2 детали 1, а также средства хранения, которые выполнены с возможностью считывания компьютерным устройством (например, память 12 этого устройства 10) и на которых записан этот компьютерный программный продукт.

Группа изобретений относится к средствам моделирования. Технический результат – повышение качества и точности моделирования части неосесимметричной поверхности участка детали. Для этого предложен способ моделирования по меньшей мере части неосесимметричной поверхности (S) участка (2) детали (1), в котором участок (2) ограничен первой и второй экстремальными плоскостями (PS, PR). Способ включает: (a) моделирование по меньшей мере двух неосесимметричных элементарных поверхностей (Sk, SI, SE), образующих указанную поверхность (S), при этом каждая из элементарных поверхностей (Sk, SI, SE) расположена между двумя экстремальными плоскостями (PS, PR) участка (2), и они имеют соединение по меньшей мере С1 на уровне экстремальных плоскостей (PS, PR) и по меньшей мере один разрыв; (b) построение по меньшей мере одной кривой сопряжения (CR) класса С1, касательной к первой и второй поверхностям; (c) локальное изменение первой и второй элементарных поверхностей (Sk, SI, SE) таким образом, чтобы соблюдать указанную кривую сопряжения (CR) вблизи указанного разрыва; (d) воспроизведение на интерфейсе (13) по меньшей мере одной части полученной поверхности (S). 4 н. и 11 з.п. ф-лы, 11 ил.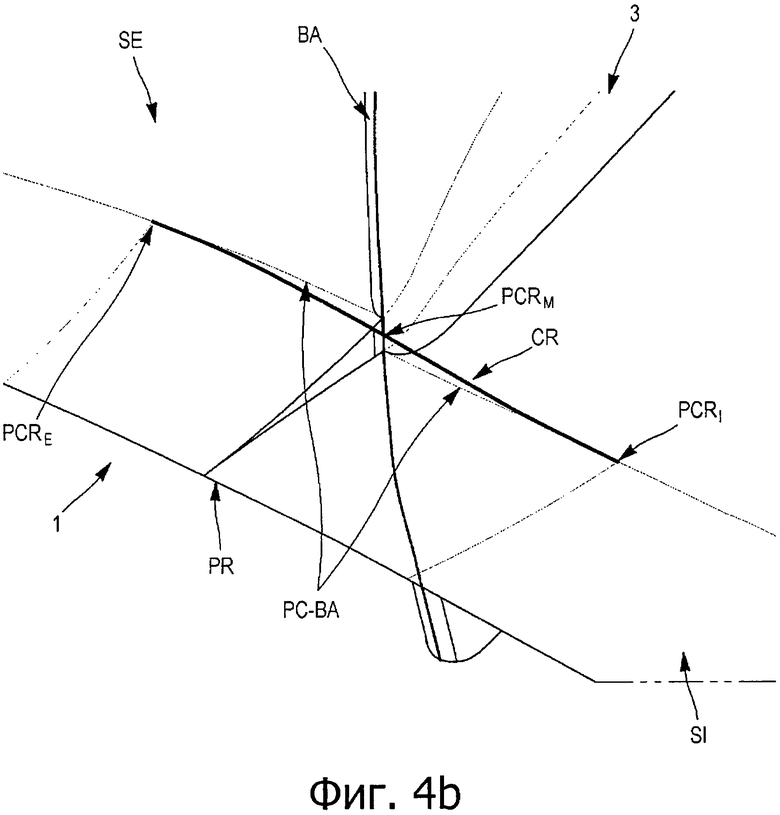
1. Способ моделирования по меньшей мере части неосесимметричной поверхности (S) участка (2) детали (1), причем участок (2) ограничен первой и второй экстремальными плоскостями (PS, PR) и на окружности участка (2) детали (1) расположено множество лопаток (3), характеризующийся тем, что включает выполнение с помощью средств (11) обработки данных устройства (10) следующих этапов, на которых:
(а) моделируют по меньшей мере две неосесимметричные элементарные поверхности (Sk, SI, SE), образующие указанную поверхность (S), при этом каждая из элементарных поверхностей (Sk, SI, SE) расположена между двумя экстремальными плоскостями (PS, PR) участка (2) и между двумя лопатками (3) и образована по меньшей мере одной кривой построения (PC-k, PC-I, PC-E), расположенной в плоскости, параллельной экстремальным плоскостям (PS, PR), при этом первая и вторая элементарные поверхности (Sk, SI, SE) прилегают друг к другу таким образом, что расположены с одной и с другой стороны от лопатки (3) соответственно на корытце и на спинке и имеют соединение по меньшей мере С1 на уровне экстремальных плоскостей (PS, PR) и по меньшей мере один разрыв, при этом разрыв представляет собой разрыв, проходящий от первой экстремальной плоскости (PS) к передней кромке (ВА) лопатки (3), и/или разрыв, проходящий от задней кромки (BF) лопатки (3) к второй экстремальной плоскости (PR);
(b) выполняют построение по меньшей мере одной кривой сопряжения (CR) класса С1, образованной первой и второй экстремальными точками (PCRI, PCRE), соответственно расположенными на первой и второй элементарных поверхностях (Sk, SI, SE), при этом указанная кривая сопряжения (CR) является касательной к первой и второй поверхностям соответственно в первой и второй экстремальных точках (PCRI, PCRE);
(c) локально изменяют первую и вторую элементарные поверхности (Sk, SI, SE) таким образом, чтобы соблюдать указанную кривую сопряжения (CR) вблизи указанного разрыва;
(d) воспроизводят на интерфейсе (13) указанного устройства (10) указанную по меньшей мере одну часть полученной поверхности (S).
2. Способ по п. 1, в котором соединение между первой и второй элементарными поверхностями (SI, SE) имеет первый разрыв, проходящий от первой экстремальной плоскости (PS) к передней кромке (BA) лопатки (3), и второй разрыв, проходящий от задней кромки (BF) лопатки (3) ко второй экстремальной плоскости (PR).
3. Способ по п. 2, в котором кривую сопряжения (CR) строят на этапе (b) для первого и второго разрывов, при этом каждая кривая сопряжения (CR) является касательной к лопатке (3) на уровне задней кромки (BF) или передней кромки (BA).
4. Способ по п. 3, в котором кривая сопряжения (CR) проходит через срединную точку (PCRM), расположенную на задней кромке (BF) или на передней кромке (BA) лопатки (3), таким образом, что расстояние между срединной точкой (PCRM) и первой элементарной поверхностью (SE) равно расстоянию между срединной точкой (PCRM) и второй элементарной поверхностью (SI).
5. Способ по п. 4, в котором кривая сопряжения (CR) является сплайном, полностью образованным экстремальными точками (PCRI, PCRE) и срединной точкой (PCRM).
6. Способ по любому из пп. 2-5, в котором для каждого из первого и второго разрывов на этапе (с) выполняют построение поверхности сопряжения (SR), имеющей в любой точке своего края непрерывность касания с первой или второй элементарной поверхностью (Sk, SI, SE).
7. Способ по п. 6, в котором каждая элементарная поверхность (Sk, SI, SE) имеет по меньшей мере одну кривую построения (PC-k, PC-I, PC-E), расположенную между передней кромкой (BA) и задней кромкой (BF) лопатки (3), при этом каждая из двух поверхностей сопряжения (SR) расположена на каждой из первой и второй элементарных поверхностей (Sk, SI, SE) от экстремального края (PR, PS) до первой кривой построения (PC-k, PC-I, PC-E) за пределами кривой сопряжения (CR).
8. Способ по п. 1, в котором для каждой кривой построения (PC-k, PC-I, PC-E) каждой элементарной поверхности (Sk, SI, SE) на этапе (а) выполняют следующие подэтапы, на которых:
(а1) параметризуют кривую построения (PC-k, PC-I, PC-E) как кривую класса С1, отображающую значение характеристической физической величины указанной поверхности (S) в зависимости от положения вдоль ширины элементарной поверхности (Sk, SI, SE), при этом кривая образована:
- двумя экстремальными контрольными точками (PCUI, PCUE) соответственно на каждой из двух лопаток (3), между которыми расположена указанная элементарная поверхность (Sk, SI, SE), определяющими протяженность указанной ширины элементарной поверхности (Sk, SI, SE);
- по меньшей мере одним сплайном;
при этом параметризацию осуществляют по одному или нескольким параметрам, определяющим по меньшей мере одну из экстремальных контрольных точек (PCUI, PCUE);
(а2) определяют оптимизированные значения указанных параметров указанной кривой.
9. Способ по п. 8, в котором каждая кривая построения (PC-k, PC-I, PC-E) каждой элементарной поверхности (Sk, SI, SE) образована также по меньшей мере одной промежуточной контрольной точкой (PCUM), расположенной между экстремальными точками (PCUI, PCUE), и по меньшей мере двумя сплайнами, соединенными на уровне указанной промежуточной контрольной точки (PCUM);
при этом параметризацию выполняют также по одному или нескольким параметрам, определяющим указанную промежуточную контрольную точку (PCUM).
10. Способ по п. 8, в котором параметр или параметры, определяющие промежуточную или экстремальную контрольную точку (PCUI, PCUM, PCUE), образующую кривую построения (PC-k, PC-I, PC-E), выбирают среди абсциссы точки, ординаты точки, ориентации касательной к кривой в точке и по меньшей мере одного коэффициента натяжения, связанного с полукасательной к кривой на уровне точки.
11. Способ по п. 10, в котором коэффициент натяжения, связанный с полукасательной к кривой на уровне промежуточной или экстремальной точки, является функцией значения производной второго порядка кривой вблизи точки.
12. Способ по любому из пп. 8-11, в котором каждый сплайн кривой построения (PC-k, PC-I, PC-E) является кривой Безье, полностью определяемой контрольными точками (PCUI, PCUM, PCUE) , образующими ее концы.
13. Способ изготовления детали (1), участок (2) которой содержит неосесимметричную поверхность (S), включающий этапы, на которых:
- выполняют способ моделирования по меньшей мере части указанной неосесимметричной поверхности (S) участка (2) детали (1) по любому из пп. 1-12;
- изготавливают указанную деталь (1) в соответствии с моделированием указанной по меньшей мере части полученной поверхности (S).
14. Устройство (10) моделирования по меньшей мере части неосесимметричной поверхности (S) участка (2) детали (1), причем участок (2) ограничен первой и второй экстремальными плоскостями (PS, PR), при этом на окружности участка (2) детали (1) расположено множество лопаток (3), содержащее средства (11) обработки данных, которые включают в себя:
- модуль моделирования по меньшей мере двух неосесимметричных элементарных поверхностей (Sk, SI, SE), образующих указанную поверхность (S), причем каждая из элементарных поверхностей (Sk, SI, SE) расположена между двумя экстремальными плоскостями (PS, PR) участка (2) и образована по меньшей мере одной кривой построения (PC-k, PC-I, PC-E), расположенной в плоскости, параллельной экстремальным плоскостям (PS, PR), при этом первая и вторая элементарные поверхности (Sk, SI, SE) прилегают друг к другу таким образом, что имеют соединение по меньшей мере С1 на уровне экстремальных плоскостей (PS, PR) и по меньшей мере один разрыв; при этом разрыв представляет собой разрыв, проходящий от первой экстремальной плоскости (PS) к передней кромке (ВА) лопатки (3), и/или разрыв, проходящий от задней кромки (BF) лопатки (3) к второй экстремальной плоскости (PR);
- модуль построения по меньшей мере одной кривой сопряжения (CR) класса С1, образованной первой и второй экстремальными точками (PCRI, PCRE), соответственно расположенными на первой и второй элементарных поверхностях (Sk, SI, SE), при этом указанная кривая сопряжения (CR) является касательной к первой и второй поверхностям соответственно в первой и второй экстремальных точках (PCRI, PCRE);
- модуль локального изменения первой и второй элементарных поверхностей (Sk, SI, SE) таким образом, чтобы соблюдать указанную кривую сопряжения (CR) вблизи указанного разрыва;
- модуль воспроизведения на интерфейсе (13) указанного устройства (10) указанной по меньшей мере одной части полученной поверхности (S).
15. Машиночитаемое средство хранения информации, на котором записан компьютерный программный продукт, содержащий командные коды для исполнения способа моделирования по меньшей мере части неосесимметричной поверхности (S) участка (2) детали (1) по любому из пп. 1-12.
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| ПАЗОННЫЙ СПОСОБ МОДЕЛИРОВАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2137286C1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |

