Изобретение относится к измерительной технике и предназначено для использования в системах стабилизации и навигации. Оно может найти применение в приборах для измерения механических величин (например, угловых скоростей) компенсационного типа.
Известно устройство для измерения ускорений (А.С. №742801 опубл. в бюл. изобретений №23, 1980), содержащее чувствительный элемент, датчик угла, интегрирующий усилитель обратной связи, датчик момента, дополнительный интегрирующий усилитель, электронный ключ, пороговый элемент, причем первый выход датчика угла подключен через интегрирующий усилитель обратной связи к датчику момента, а второй выход датчика угла через пороговый элемент и дополнительный интегрирующий усилитель, подключенный к управляющему входу электронного ключа.
Недостатком подобного устройства является низкая точность измерения, обусловленная точностью работы интегрирующих аналоговых усилителей и порогового элемента. Кроме того, точность измерения зависит от параметров схемы электронного ключа, осуществляющего выборку информации. Основная погрешность устройства связана с конечностью времени заряда конденсатора интегрирующего усилителя и эта погрешность приводит к апертурной ошибке, свойственной подобной схеме выборки и обработки информации.
Наиболее близким по техническому решению является компенсационный акселерометр (патент РФ №2478211 С1, Кл. G01P 15/13, опубл. 27.03.2013 Бюл. №9), содержащий чувствительный элемент, угловое положение которого фиксируется датчиком угла, отрицательную обратную связь, реализованную с выхода датчика угла на вход первого сумматора через последовательно соединенные по информационным входам интегрирующий усилитель, фазовый детектор отрицательной обратной связи, преобразователь напряжение-ток, отрицательную интегрирующую обратную связь, включающую в себя последовательно соединенные по информационным входам, с выхода дополнительного интегрирующего усилителя на вход первого сумматора, компаратор, преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, схему сравнения, пороговый элемент, электронный ключ, вход которого соединен с выходом генератора тока, второй вход схемы сравнения соединен с выходом суммирующего двоичного счетчика, дополнительные входы компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика и суммирующего двоичного счетчика соединены с генератором вспомогательной частоты, другие входы датчика угла, фазового детектора отрицательной обратной связи соединены с выходом генератора опорного напряжения, и выход первого сумматора соединен с входом датчика момента, введены, в отрицательную интегрирующую обратную связь, второй сумматор и широкополосный фильтр с передаточной функцией  (где: T1, T2 - постоянные времени фильтра, ξ1, ξ2 - относительные коэффициенты демпфирования, ξ1>ξ2,
(где: T1, T2 - постоянные времени фильтра, ξ1, ξ2 - относительные коэффициенты демпфирования, ξ1>ξ2,  преобразователь Лапласа) и второй сумматор, причем вход широкополосного фильтра соединен с одним из выходов фазового детектора отрицательной обратной связи, а выход, с входом второго сумматора, выход второго сумматора соединен с входом дополнительного интегрирующего усилителя, а также сглаживающий фильтр, с передаточной функцией
преобразователь Лапласа) и второй сумматор, причем вход широкополосного фильтра соединен с одним из выходов фазового детектора отрицательной обратной связи, а выход, с входом второго сумматора, выход второго сумматора соединен с входом дополнительного интегрирующего усилителя, а также сглаживающий фильтр, с передаточной функцией  (где: k, T - соответственно коэффициент передачи и постоянная времени фильтра), включенный в местную отрицательную обратную связь, с выхода компаратора на один из входов второго сумматора, и выход двоичного реверсивного счетчика является цифровым выходом устройства.
(где: k, T - соответственно коэффициент передачи и постоянная времени фильтра), включенный в местную отрицательную обратную связь, с выхода компаратора на один из входов второго сумматора, и выход двоичного реверсивного счетчика является цифровым выходом устройства.
Недостатком компенсационного акселерометра является малая полоса пропускания.
Технической задачей настоящего изобретения является расширение полосы пропускания компенсационного акселерометра и повышение точности измерения.
Это достигается за счет того, что в компенсационный акселерометр, содержащий чувствительный элемент, угловое положение которого фиксируется датчиком угла, выход которого соединен с входом фазового детектора отрицательной обратной связи через усилитель, и генератор опорного напряжения соединен с входами датчика угла и фазового детектора отрицательной обратной связи, интегрирующую отрицательную обратную связь с выхода интегрирующего усилителя на вход датчика момента через последовательно соединенные по информационным входам, компаратор, преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, схему сравнения, пороговый элемент, электронный ключ, вход которого соединен с выходом генератора тока, второй вход схемы сравнения соединен с выходом суммирующего двоичного счетчика, дополнительные входы компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика и суммирующего двоичного счетчика соединены с генератором вспомогательной частоты, введены последовательно соединенные первый и второй фильтры с выхода фазового детектора отрицательной обратной связи на вход интегрирующего усилителя, а также звено запаздывания с выхода интегрирующего усилителя на его вход и выход двоичного реверсивного счетчика является цифровым выходом компенсационного акселерометра, один из выходов реверсивного двоичного счетчика является дискретным выходом устройства.
Введение в интегрирующую отрицательную обратную связь пары фильтров и звена запаздывания позволяет создать компенсационный акселерометр с астатизмом по отклонению, а реализация автоколебательного режима в интегрирующей отрицательной обратной связи позволяет расширить полосу пропускания и повысить точность измерения. Изменяя постоянные времени пары фильтров, и звена запаздывания, можно менять частоту автоколебаний, а следовательно изменять динамические характеристики компенсационного акселерометра.
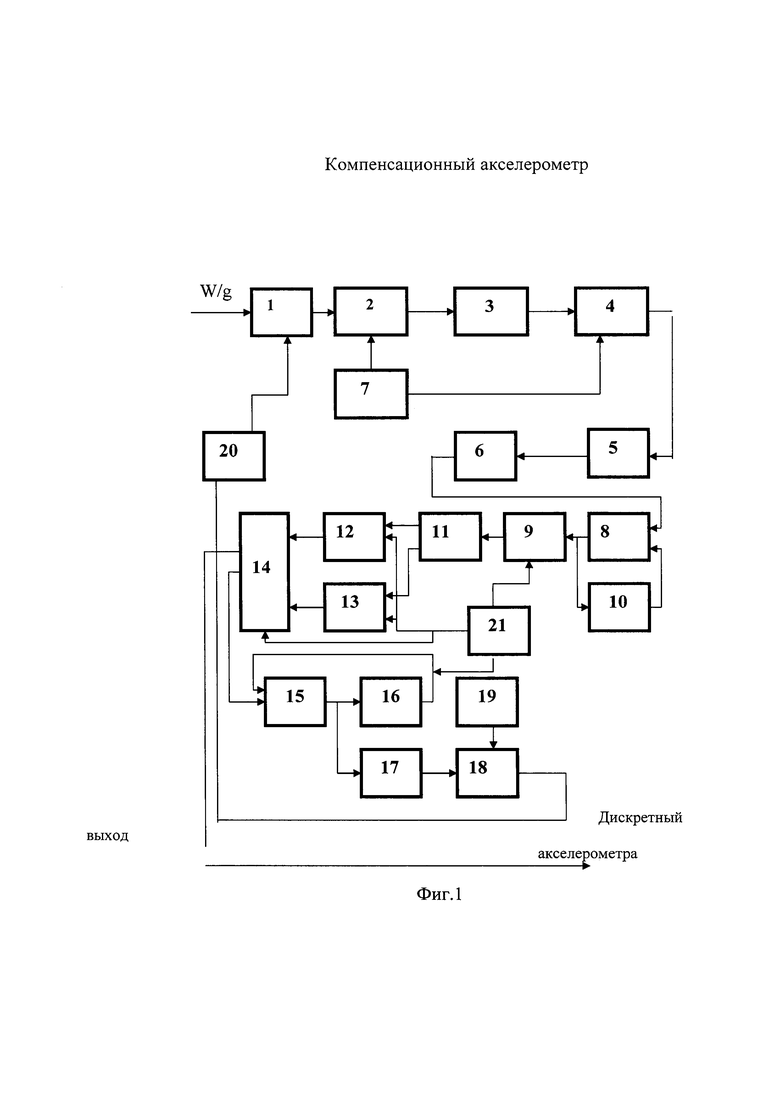
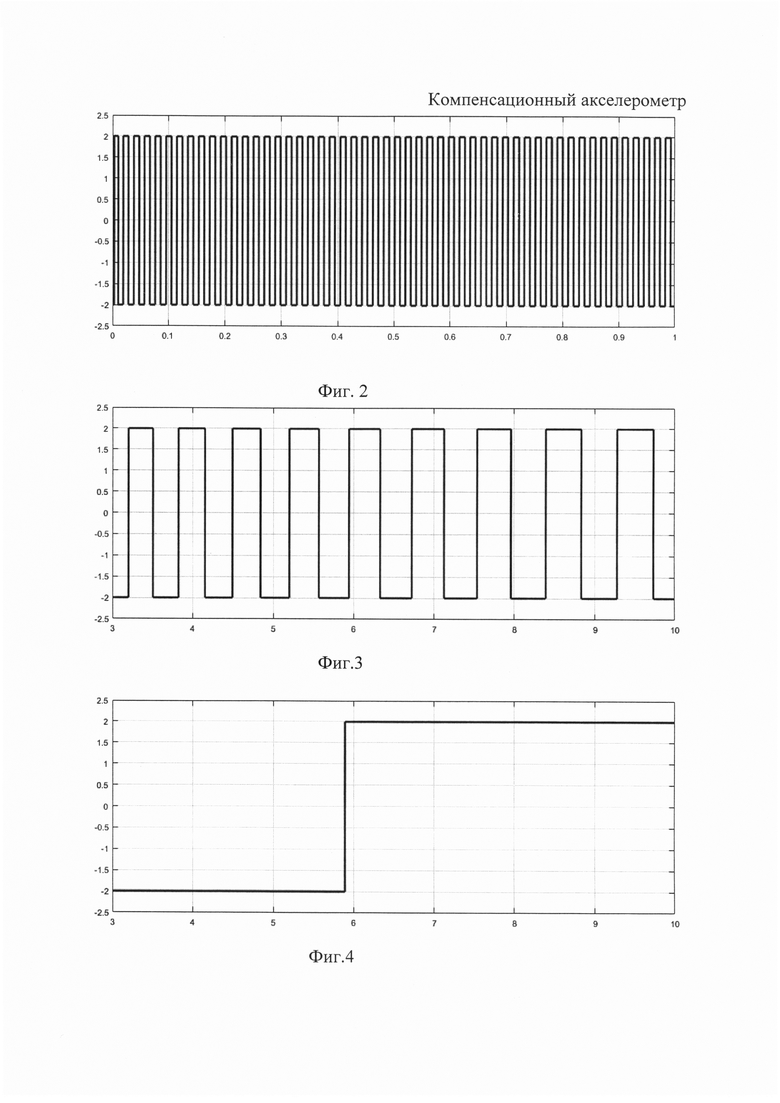
На фиг. 1 изображена функциональная схема компенсационного акселерометра; на фиг. 2 сигнал с выхода реверсивного двоичного счетчика при введении последовательно включенных двух фильтров и звена запаздывания; на фиг. 3 сигнал с выхода реверсивного двоичного счетчика при введении фильтра и звена запаздывания; на фиг. 4 сигнал с выхода реверсивного двоичного счетчика при введении только звена запаздывания.
Компенсационный акселерометр содержит чувствительный элемент 1, угловое отклонение которого фиксирует датчик угла 2. Выход датчика угла 2 соединен с входом усилителя 3. Выход усилителя 3 соединен с входом фазового детектора отрицательной обратной связи 4 (ФДООС), а выход ФДООС-4 соединен с входом первого фильтра 5, выход фильтра 5 соединен с входом второго фильтра 6. (фильтры 5 и 6 имеют передаточную функцию  , где: T1, T2 - постоянные времени фильтра, T1>T2, и постоянные времени фильтра 5 равны постоянным времени фильтра 6). Дополнительные входы датчика угла 2 и ФДООС 4 соединены с выходом генератора опорного напряжения 7. Выход фильтра 6 соединен с входом интегрирующего усилителя 8, выход которого соединен с входом компаратора 9. Выход интегрирующего усилителя 8 соединен с входом интегрирующего усилителя 8 через звено запаздывания 10, с передаточной функцией
, где: T1, T2 - постоянные времени фильтра, T1>T2, и постоянные времени фильтра 5 равны постоянным времени фильтра 6). Дополнительные входы датчика угла 2 и ФДООС 4 соединены с выходом генератора опорного напряжения 7. Выход фильтра 6 соединен с входом интегрирующего усилителя 8, выход которого соединен с входом компаратора 9. Выход интегрирующего усилителя 8 соединен с входом интегрирующего усилителя 8 через звено запаздывания 10, с передаточной функцией  (где: k, T3 - соответственно коэффициент передачи и постоянная времени звена запаздывания). Выход компаратора 9 соединен с входом преобразователя уровня 11, выходы которого соединены с входами пары ждущих синхронных генераторов (ЖСГ) 12 и 13. Выходы ЖСГ 12 и 13 соединены с входами реверсивного двоичного счетчика 14. Выход реверсивного двоичного счетчика 14 соединен с входом схемы сравнения 15. Другой вход схемы сравнения 15 соединен с выходом суммирующего двоичного счетчика 16. Выход схемы сравнения 15 соединен с входом порогового элемента 17. Выход порогового элемента 17 соединен с входом электронного ключа 18, другой вход электронного ключа 18 соединен с выходом генератора тока 19. Выход электронного ключа 18 соединен с входом датчика момента 20. Дополнительные входы компаратора 9, ЖСГ 12 и 13, реверсивного двоичного счетчика 14, суммирующего двоичного счетчика 16 соединены с выходом генератора вспомогательной частоты 21. Один из выходов реверсивного двоичного счетчика 14 является цифровым выходом компенсационного акселерометра.
(где: k, T3 - соответственно коэффициент передачи и постоянная времени звена запаздывания). Выход компаратора 9 соединен с входом преобразователя уровня 11, выходы которого соединены с входами пары ждущих синхронных генераторов (ЖСГ) 12 и 13. Выходы ЖСГ 12 и 13 соединены с входами реверсивного двоичного счетчика 14. Выход реверсивного двоичного счетчика 14 соединен с входом схемы сравнения 15. Другой вход схемы сравнения 15 соединен с выходом суммирующего двоичного счетчика 16. Выход схемы сравнения 15 соединен с входом порогового элемента 17. Выход порогового элемента 17 соединен с входом электронного ключа 18, другой вход электронного ключа 18 соединен с выходом генератора тока 19. Выход электронного ключа 18 соединен с входом датчика момента 20. Дополнительные входы компаратора 9, ЖСГ 12 и 13, реверсивного двоичного счетчика 14, суммирующего двоичного счетчика 16 соединены с выходом генератора вспомогательной частоты 21. Один из выходов реверсивного двоичного счетчика 14 является цифровым выходом компенсационного акселерометра.
Внутреннее содержание ФДООС, компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика, схемы сравнения, порогового элемента, суммирующего двоичного счетчика, преобразователя уровня, сумматора, усилителей, фильтров приведены в книге: П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, т 1-3, 1993.
Компенсационный акселерометр работает следующим образом.
При действии ускорения W на чувствительный элемент 1, выполненный в виде маятника, действует инерционный момент m⋅l⋅W (l, m - длинна и масса маятника). Под действием этого момента происходит отклонение чувствительного элемента 1, которое фиксируется датчиком угла 2, обмотки, возбуждения которого соединены с выходом ГОН 7. Один из выходов ГОН 7 соединен с входом ФДООС 4. Сигнал с датчика угла 2, после усиления усилителем 3, поступает на вход ФДООС 4. С помощью ФДООС 4 и ГОН 7 выделяется фаза отклонения чувствительного элемента 1, и на выходе ФДООС 4 сигнал всегда будет в противофазе отклонения чувствительного элемента 1. Сигнал с выхода ФДООС 4, в виде напряжения, поступает на вход первого фильтра 5, выход которого соединен с входом второго фильтра 6. Введение фильтров 5 и 6, с передаточной функцией  , позволяет повысить коэффициент передачи по разомкнутому контуру и обеспечить астатизм по отклонению. Сигнал с выхода второго фильтра 6, в виде напряжения, поступает на вход компаратора 9 через интегрирующий усилитель 8, в обратную связь которого введено звено запаздывания 10. Введение звена запаздывания 10, с передаточной функцией
, позволяет повысить коэффициент передачи по разомкнутому контуру и обеспечить астатизм по отклонению. Сигнал с выхода второго фильтра 6, в виде напряжения, поступает на вход компаратора 9 через интегрирующий усилитель 8, в обратную связь которого введено звено запаздывания 10. Введение звена запаздывания 10, с передаточной функцией  , позволяет уменьшить динамическую ошибку и увеличить коэффициент передачи. В компараторе 9 происходит сравнение сигнала с выхода интегрирующего усилителя 8 с сигналом, выделенного стабильного по частоте и амплитуде сигнала с выхода генератора вспомогательной частоты 21. Если сигнал с выхода интегрирующего усилителя 8 будет больше треугольного напряжения с выхода генератора вспомогательной частоты 21, то на выходе компаратора 9 будет высокий логический уровень, если меньше, то на выходе компаратора 9 - низкий логический уровень. Уровень сигнала с выхода компаратора 9 зависит от фазы отклонения чувствительного элемента 1. Сигнал с выхода компаратора 9, в виде уровня, поступает на вход преобразователя уровня 11, а затем на входы ждущих синхронных генераторов 12 и 13, которые, с помощью генератора вспомогательной частоты 21, выдают сигналы в виде импульса на каждое воздействие входного сигнала (с выхода преобразователя уровня 11) равного "1". Сигналы с выходов ЖСГ 12 и 13 поступают на входы реверсивного двоичного счетчика 14. Реверсивный двоичный счетчик 14, по сигналу с генератора вспомогательной частоты 21, производит подсчет единичных импульсов поступающих с выхода ждущего синхронного генератора 12 и вычитание импульсов, поступающих с выхода ждущего синхронного генератора 13. Реверсивный двоичный счетчик 14 положительную информацию представляет в прямом коде, а отрицательную в дополнительном коде, и преобразование дополнительного кода осуществляется схемой сравнения 15 и суммирующим двоичным счетчиком 16, дополнительный вход которого соединен с выходом генератора вспомогательной частоты 21. После логического сравнения сигналов в схеме сравнения 15, сигнал с выхода 15 поступает на вход порогового элемента 17, а затем, в виде уровня, на вход электронного ключа 18. Стабилизацию параметров электронного ключа 18 осуществляет генератор тока 19. На выходе электронного ключа 18 будут импульсы, число которых пропорционально двоичному коду, поступающему на вход схемы сравнения 15. На вход датчика момента 20 поступает сигнал с выхода электронного ключа 18, со знаком знакового разряда реверсивного двоичного счетчика 14. Выход реверсивного двоичного счетчика 14, является выходом цифрового кода компенсационного акселерометра.
, позволяет уменьшить динамическую ошибку и увеличить коэффициент передачи. В компараторе 9 происходит сравнение сигнала с выхода интегрирующего усилителя 8 с сигналом, выделенного стабильного по частоте и амплитуде сигнала с выхода генератора вспомогательной частоты 21. Если сигнал с выхода интегрирующего усилителя 8 будет больше треугольного напряжения с выхода генератора вспомогательной частоты 21, то на выходе компаратора 9 будет высокий логический уровень, если меньше, то на выходе компаратора 9 - низкий логический уровень. Уровень сигнала с выхода компаратора 9 зависит от фазы отклонения чувствительного элемента 1. Сигнал с выхода компаратора 9, в виде уровня, поступает на вход преобразователя уровня 11, а затем на входы ждущих синхронных генераторов 12 и 13, которые, с помощью генератора вспомогательной частоты 21, выдают сигналы в виде импульса на каждое воздействие входного сигнала (с выхода преобразователя уровня 11) равного "1". Сигналы с выходов ЖСГ 12 и 13 поступают на входы реверсивного двоичного счетчика 14. Реверсивный двоичный счетчик 14, по сигналу с генератора вспомогательной частоты 21, производит подсчет единичных импульсов поступающих с выхода ждущего синхронного генератора 12 и вычитание импульсов, поступающих с выхода ждущего синхронного генератора 13. Реверсивный двоичный счетчик 14 положительную информацию представляет в прямом коде, а отрицательную в дополнительном коде, и преобразование дополнительного кода осуществляется схемой сравнения 15 и суммирующим двоичным счетчиком 16, дополнительный вход которого соединен с выходом генератора вспомогательной частоты 21. После логического сравнения сигналов в схеме сравнения 15, сигнал с выхода 15 поступает на вход порогового элемента 17, а затем, в виде уровня, на вход электронного ключа 18. Стабилизацию параметров электронного ключа 18 осуществляет генератор тока 19. На выходе электронного ключа 18 будут импульсы, число которых пропорционально двоичному коду, поступающему на вход схемы сравнения 15. На вход датчика момента 20 поступает сигнал с выхода электронного ключа 18, со знаком знакового разряда реверсивного двоичного счетчика 14. Выход реверсивного двоичного счетчика 14, является выходом цифрового кода компенсационного акселерометра.
Введение в интегрирующую отрицательную обратную связь пары фильтров, с передаточными функциями  , и звена запаздывания, с передаточной функцией
, и звена запаздывания, с передаточной функцией  , позволяет создать компенсационный акселерометр с астатизмом по отклонению, а реализация автоколебательного режима в интегрирующей отрицательной обратной связи позволяет расширить полосу пропускания и повысить точность измерения.
, позволяет создать компенсационный акселерометр с астатизмом по отклонению, а реализация автоколебательного режима в интегрирующей отрицательной обратной связи позволяет расширить полосу пропускания и повысить точность измерения.
Технический результат был проверен путем моделирования компенсационного акселерометра в среде Matlab (Simulink), при отсутствии входного воздействия (W/g=0). Результаты моделирования приведены на фиг. 2-4. Из анализа моделирования (фиг. 2) следует, что компенсационный акселерометр, реализованный по схеме фиг. 1, по сравнению с результатами фиг. 3 и фиг. 4, имеет значительную частоту автоколебаний и расширенную полосу пропускания, автоколебаний. Работа предложенного компенсационного акселерометра устойчива при значительном коэффициенте передачи по разомкнутому контуру.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акселерометр | 2019 |
|
RU2696667C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513667C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513665C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2411522C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2397498C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2539826C2 |
| Компенсационный акселерометр | 2020 |
|
RU2724241C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2014 |
|
RU2555215C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2415442C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2363957C1 |
Изобретение относится к измерительной технике и предназначено для использования в системах стабилизации и навигации. Сущность изобретения заключается в том, что компенсационный акселерометр дополнительно содержит последовательно соединенные первый и второй фильтры с выхода фазового детектора отрицательной обратной связи на вход интегрирующего усилителя и звено запаздывания с выхода интегрирующего усилителя на его вход, один из выходов двоичного реверсивного счетчика является цифровым выходом компенсационного акселерометра. Технический результат – повышение точности и расширение полосы пропускания компенсационного акселерометра. 4 ил.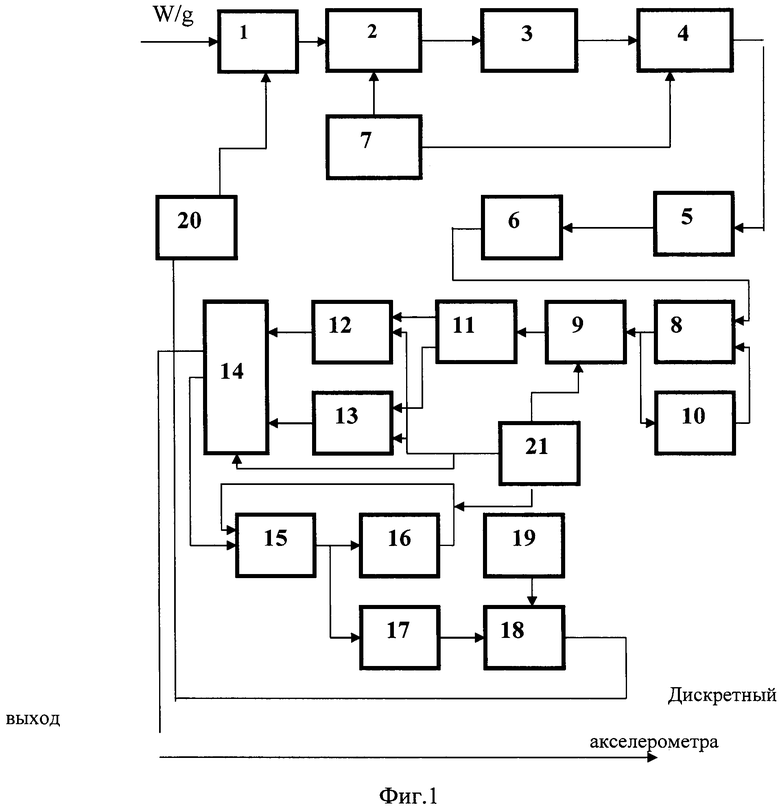
Компенсационный акселерометр, содержащий чувствительный элемент, угловое положение которого фиксируется датчиком угла, выход которого соединен с входом фазового детектора отрицательной обратной связи через усилитель, и генератор опорного напряжения соединен с входами датчика угла и фазового детектора отрицательной обратной связи, интегрирующую отрицательную обратную связь с выхода интегрирующего усилителя на вход датчика момента через последовательно соединенные по информационным входам компаратор, преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, схему сравнения, пороговый элемент, электронный ключ, вход которого соединен с выходом генератора тока, второй вход схемы сравнения соединен с выходом суммирующего двоичного счетчика, дополнительные входы компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика и суммирующего двоичного счетчика соединены с генератором вспомогательной частоты, отличающийся тем, что в него введены последовательно соединенные первый и второй фильтры с выхода фазового детектора отрицательной обратной связи на вход интегрирующего усилителя и звено запаздывания с выхода интегрирующего усилителя на его вход, один из выходов двоичного реверсивного счетчика является цифровым выходом компенсационного акселерометра.
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2478211C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513667C1 |
| US 6073490 A1, 13.06.2000 | |||
| US 7406868 B2, 05.08.2008. | |||

