Изобретение относится к измерительной техники и предназначено для использования в приборах компенсационного типа с дискретным выходом в системах стабилизации, навигации и наведения. Оно может найти применение в приборах для измерения механических величин компенсационного типа.
Известно устройство для измерения ускорений (патент РФ №2098833, кл. 6 G01P 15/13, опубл. 10.12.97), содержащее чувствительный элемент, включающий в себя два неподвижных электрода и подвижную пластину, три усилителя, два резистора, при этом выход первого усилителя подключен к первому резистору, а вход второго усилителя соединен со вторым резистором и является выходом устройства. Для повышения помехоустойчивости при воздействии электрических помех в него введен источник опорного напряжения, генератор электрического сигнала, две транзисторные пары, три резистора, два конденсатора, позволяющих за счет охвата усилителя отрицательной обратной связью осуществлять компенсацию электрических помех.
Недостатком данного устройства является низкая точность измерения, так как выбор коэффициента усиления с жесткой отрицательной обратной связи ограничен условием устойчивости системы.
Наиболее близким по техническому решению является компенсационный акселерометр (описанное в пат. РФ. Компесационный акселерометр, RU 2397498 С1, опубл. в бюл. изобретений 20.08.2010 г., №23), содержащий чувствительный элемент, угловое положение которого фиксируется датчиком угла, интегрирующий усилитель, датчик момента, электронный ключ, пороговый элемент, дополнительный интегрирующий усилитель, включенные в отрицательную обратную связь, введены отрицательные обратные связи, одна с выхода датчика угла на вход сумматора через последовательно соединенные по информационным входам интегрирующий усилитель, фазовый детектор отрицательной обратной связи, преобразователь напряжение-ток, другая с выхода фазового детектора отрицательной обратной связи на вход сумматора через последовательно соединенные по информационным входам сглаживающий фильтр, дополнительный интегрирующий усилитель, компаратор, преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, схему сравнения, пороговый элемент, электронный ключ, вход которого соединен с выходом генератора тока, второй вход схемы сравнения соединен с выходом суммирующего двоичного счетчика, и дополнительные входы компаратора, ждущих синхронных генераторов, суммирующего двоичного счетчика, реверсивного двоичного счетчика соединены с выходом генератора вспомогательной частоты, дополнительные входы датчика угла, фазового детектора отрицательной обратной связи соединены с выходом генератора опорного напряжения, и выход сумматора соединен с входом датчика момента, выходы с реверсивного двоичного счетчика и преобразователя напряжение-ток являются соответственно цифровым и аналоговым выходом компенсационного акселерометра.
Недостатком подобного компенсационного акселерометра является низкая точность измерения, обусловленная точностью работы интегрирующих аналоговых усилителей и порогового элемента. Кроме того, точность измерения зависит от параметров схемы электронного ключа, осуществляющего выборку информации. Основная погрешность устройства связана с конечностью времени заряда конденсатора интегрирующего усилителя. Эта погрешность приводит к апертурной ошибке, свойственной подобной схеме выборки и обработки информации.
Технической задачей настоящего изобретения является расширение полосы пропускания компенсационного акселерометра и повышение точности измерения.
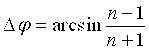
Поставленная задача решена за счет того, что в компенсационный акселерометр, содержащий чувствительный элемент, угловое положение которого фиксируется датчиком угла, фазовый детектор отрицательной обратной связи, соединенный с выходом датчика угла через интегрирующий усилитель, генератор опорного напряжения, выходы которого соединены с входами датчика угла и фазового детектора отрицательной обратной связи, последовательно соединенные по информационным входам с выхода компаратора на вход схемы сравнения, преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, а также суммирующий двоичный счетчик, выход которого соединен с одним из входов схемы сравнения, пороговый элемент, выход которого соединен с одним из входов датчика момента через электронный ключ, а вход с выходом схемы сравнения, генератор тока соединенный с входом электронного ключа, генератор вспомогательной частоты, соединенный с входами компаратора, пары ждущих синхронных генераторов, суммирующего двоичного счетчика и реверсивного двоичного счетчика, введены с выходов фазового детектора отрицательной обратной связи на один из входов датчика момента фильтр с передаточной функцией  , (где Т - постоянная времени, n - параметр, связанный с запасом по фазе Δφ зависимостью
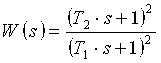
, (где Т - постоянная времени, n - параметр, связанный с запасом по фазе Δφ зависимостью  , s - оператор преобразования Лапласа), и на вход компаратора стабилизирующая цепь, содержащая два контура, с отставанием по фазе, с передаточной функцией
, s - оператор преобразования Лапласа), и на вход компаратора стабилизирующая цепь, содержащая два контура, с отставанием по фазе, с передаточной функцией  (где T2>T1, Т1, T2 - постоянные времени стабилизирующей цепи), и выход реверсивного двоичного счетчика является цифровым выходом компенсационного акселерометра.
(где T2>T1, Т1, T2 - постоянные времени стабилизирующей цепи), и выход реверсивного двоичного счетчика является цифровым выходом компенсационного акселерометра.
Введение в компенсационный акселерометр двух отрицательных обратных связей, одна из которых содержит фильтр, а другая стабилизирующую цепь, с двумя контурами с отставанием по фазе, позволяет создать устройство для измерения ускорений повышенной точности, работающее в автоколебательном режиме, с астатизмом по отклонению и по скорости, с расширенной полосой пропускания и значительным быстродействием. Кроме того, введение в компенсационный акселерометр стабилизирующей цепи позволяет исключить появление апериодической составляющей, что в конечном итоге влияет на точность измерения ускорения.
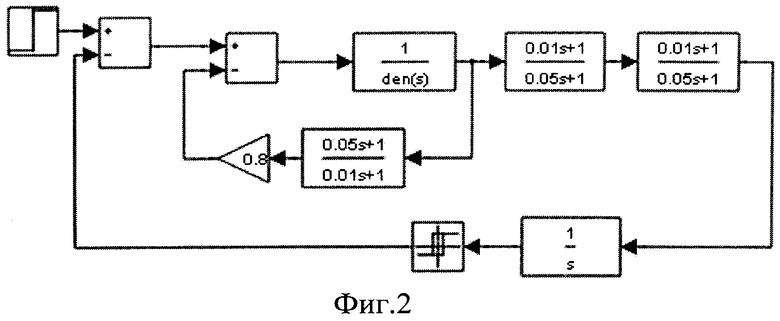
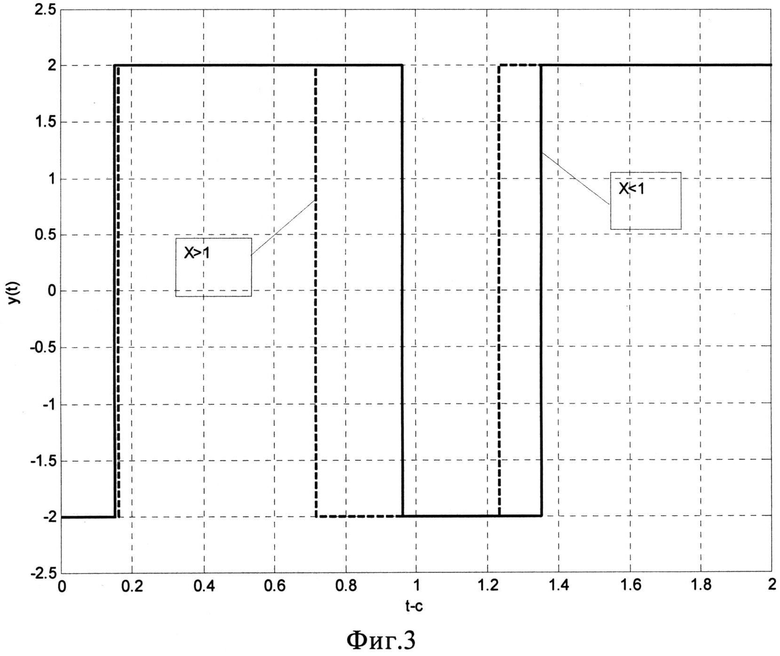
Изобретение поясняется чертежами, где на фиг.1 изображена функциональная схема компенсационного акселерометра, на фиг.2 приведена схема моделирования компенсационного акселерометра, на фиг.3 - результаты моделирования компенсационного акселерометра.
Компенсационный акселерометр содержит чувствительный элемент 1, угловое отклонение которого фиксирует датчик угла 2. Выход датчика угла 2 соединен с входом интегрирующего усилителя 3. Выход интегрирующего усилителя 3 соединен с входом фазового детектора отрицательной обратной связи 4 (ФДООС). Дополнительные входы датчика угла 2, ФДООС 4 соединены с выходом генератора опорного напряжения 5 (ГОН). Один из выходов ФДООС 4 соединен с входом фильтра 6 с передаточной функцией  (где Т - постоянная времени, n - параметр, связанный с запасом по фазе Δφ зависимостью
(где Т - постоянная времени, n - параметр, связанный с запасом по фазе Δφ зависимостью  , s - оператор преобразования Лапласа). Другой выход ФДООС 4 соединен с входом стабилизирующей цепи 7. Стабилизирующая цепь 7 содержит два контура с отставанием по фазе с передаточной функцией
, s - оператор преобразования Лапласа). Другой выход ФДООС 4 соединен с входом стабилизирующей цепи 7. Стабилизирующая цепь 7 содержит два контура с отставанием по фазе с передаточной функцией  (где T2>T1, Т1,Т2 - постоянные времени стабилизирующей цепи). Выход стабилизирующей цепи 7 соединен с входом компаратора 8. Выход компаратора 8 соединен с входом преобразователя уровня 9, выходы которого соединены с входами пары ждущих синхронных генераторов (ЖСГ) 10 и 11. Выходы ЖСГ 10 и 11 соединены с входами реверсивного двоичного счетчика 12. Выход реверсивного двоичного счетчика 12 соединен с входом схемы сравнения 13. Другой вход схемы сравнения 13 соединен с выходом суммирующего двоичного счетчика 14. Выход схемы сравнения 13 соединен с входом с порогового элемента 15. Выход порогового элемента 15 соединен с входом электронного ключа 16, другой вход электронного ключа 16 соединен с выходом генератора тока 17. Выход электронного ключа 16 соединен с одним из входов датчика момента 18, другой вход которого соединен с выходом фильтра 6. Дополнительные входы компаратора 8, ЖСГ 10 и 11, реверсивного двоичного счетчика 12, суммирующего двоичного счетчика 14 соединены с выходом генератора вспомогательной частоты 19.
(где T2>T1, Т1,Т2 - постоянные времени стабилизирующей цепи). Выход стабилизирующей цепи 7 соединен с входом компаратора 8. Выход компаратора 8 соединен с входом преобразователя уровня 9, выходы которого соединены с входами пары ждущих синхронных генераторов (ЖСГ) 10 и 11. Выходы ЖСГ 10 и 11 соединены с входами реверсивного двоичного счетчика 12. Выход реверсивного двоичного счетчика 12 соединен с входом схемы сравнения 13. Другой вход схемы сравнения 13 соединен с выходом суммирующего двоичного счетчика 14. Выход схемы сравнения 13 соединен с входом с порогового элемента 15. Выход порогового элемента 15 соединен с входом электронного ключа 16, другой вход электронного ключа 16 соединен с выходом генератора тока 17. Выход электронного ключа 16 соединен с одним из входов датчика момента 18, другой вход которого соединен с выходом фильтра 6. Дополнительные входы компаратора 8, ЖСГ 10 и 11, реверсивного двоичного счетчика 12, суммирующего двоичного счетчика 14 соединены с выходом генератора вспомогательной частоты 19.
Внутреннее содержание ФДООС, компаратора, ждущих синхронных генераторов, реверсивного двоичного счетчика, схемы сравнения, порогового элемента, суммирующего двоичного счетчика, преобразователя уровня, сумматора, интегрирующего усилителя, дифференцирующих фильтров и интегратора приведены в книге: П. Хоровиц, У. Хилл. Искусство схемотехники. М.: Мир, т1-3, 1993; Н.Т. Кузовков. Динамика систем автоматического управления. М.: Машиностроение, 1968.
Компенсационный акселерометр работает следующим образом. При действии ускорения W на чувствительный элемент 1, выполненный в виде маятника, действует инерционный момент, равный m·l·W (где m, l - масса и длина маятника). Под действием этого момента происходит отклонение чувствительного элемента 1, которое фиксируется датчиком угла 2, обмотки возбуждения которого соединены с выходом ГОН 5. Сигнал с датчика угла 2, после усиления интегрирующим усилителем 3, поступает на вход ФДООС 4. С помощью ФДООС 4 и ГОН 5 выделяется фаза отклонения чувствительного элемента 1, и на выходе ФДООС 4 сигнал всегда будет в противофазе отклонения чувствительного элемента 1. Сигнал с выхода ФДООС 4 в виде напряжения поступает на вход фильтра 6, а затем на один из входов датчика момента 18. Один из выходов ФДООС 4 соединен с входом стабилизирующей цепи 7. Стабилизирующая цепь 7, содержащая два контура с отставанием по фазе, обеспечивает малое быстродействие при малом входном ускорении и высокое быстродействие при значительном ускорении (фиг.3). Выход стабилизирующей цепи 7 соединен с входом компаратора 8. В компараторе 8 происходит сравнение сигнала с выхода стабилизирующей цепи 7 с сигналом выделенного стабильного по частоте и амплитуде сигнала с выхода генератора вспомогательной частоты 19. Если сигнал с выхода 7 будет больше треугольного напряжения с выхода генератора вспомогательной частоты 19, то на выходе компаратора 8 будет высокий логический уровень, если меньше, то на выходе компаратора 8 - низкий логический уровень. Уровень сигнала с выхода компаратора 8 зависит от фазы отклонения чувствительного элемента 1. Сигнал с выхода компаратора 8 в виде уровня поступает на вход преобразователя уровня 9, а затем на входы ждущих синхронных генераторов 10 и 11, которые с помощью генератора вспомогательной частоты 19 выдают сигналы в виде импульса на каждое воздействие входного сигнала (с выхода преобразователя уровня 9), равного "1". Реверсивный двоичный счетчик 12 по сигналу с генератора вспомогательной частоты 19 производит подсчет единичных импульсов, поступающих с выхода ждущего синхронного генератора 10, и вычитание импульсов, поступающих с выхода ждущего синхронного генератора 11. Реверсивный двоичный счетчик 12 положительную информацию представляет в прямом коде, а отрицательную в дополнительном коде, и преобразование дополнительного кода осуществляется схемой сравнения 13 и суммирующим двоичным счетчиком 14. После логического сравнения сигналов в схеме сравнения 13 сигнал с выхода 13 поступает на вход порогового элемента 15, а затем в виде уровня на вход электронного ключа 16. Стабилизацию параметров электронного ключа 16 осуществляет генератор тока 17. На выходе электронного ключа 16 будут импульсы, число которых пропорционально двоичному коду, поступающему на вход схемы сравнения 13. На вход датчика момента 18 поступают сигналы как с выхода фильтра 6, так и с выхода электронного ключа 16. Сигнал, поступающий на токовую обмотку датчика момента 18, будет со знаком знакового разряда реверсивного двоичного счетчика 12. Выход реверсивного двоичного счетчика 12 является выходом цифрового кода компенсационного акселерометра. Отрицательная обратная связь, реализованная с выхода датчика угла 2 на вход датчика момента 18 и содержащая интегрирующий усилитель 3, ФДООС 4 и фильтр 6, с передаточной функцией  , осуществляет стабилизацию параметров компенсационного акселерометра. Отрицательная обратная связь, введенная с выхода датчика угла 2 на один из входов датчика момента 18 и содержащая интегрирующий усилитель 3, ФДООС 4, стабилизирующую цепь 7, содержащую два контура, с отставанием по фазе, передаточной функцией
, осуществляет стабилизацию параметров компенсационного акселерометра. Отрицательная обратная связь, введенная с выхода датчика угла 2 на один из входов датчика момента 18 и содержащая интегрирующий усилитель 3, ФДООС 4, стабилизирующую цепь 7, содержащую два контура, с отставанием по фазе, передаточной функцией  , компаратор 8, преобразователь уровня 9, пару ЖСГ 10 и 11, реверсивный двоичный счетчик 12, схему сравнения 13, пороговый элемент 15, электронный ключ 16, обеспечивает различное быстродействие компенсационного акселерометра при различном входном воздействии и астатизм по отклонению и по скорости.
, компаратор 8, преобразователь уровня 9, пару ЖСГ 10 и 11, реверсивный двоичный счетчик 12, схему сравнения 13, пороговый элемент 15, электронный ключ 16, обеспечивает различное быстродействие компенсационного акселерометра при различном входном воздействии и астатизм по отклонению и по скорости.
Моделирование аналоговой модели компенсационного акселерометра (фиг.2) при параметрах: Т=0.2 с, при ширине зоны неоднозначности порогового элемента, равной ±0.01, и результаты моделирования представлены на фиг.3. Из анализа переходных процессов следует, что устройство устойчиво (устойчивость обеспечивает фильтр 6) и на выходе модели имеем дискретные сигналы, частота которых зависит от параметров устройства.
Введение в компенсационный акселерометр двух отрицательных обратных связей позволяет создать устройство для измерения ускорений с астатизмом, работающее в автоколебательном режиме, с расширенной полосой пропускания и значительным быстродействием.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2539826C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2397498C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2415442C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513665C1 |
| Компенсационный акселерометр | 2018 |
|
RU2676177C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2011 |
|
RU2478211C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2411522C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2008 |
|
RU2363957C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2012 |
|
RU2513667C1 |
| Компенсационный акселерометр | 2022 |
|
RU2792706C1 |
Изобретение может найти применение в приборах измерения механических величин компенсационного типа. Компенсационный акселерометр содержит чувствительный элемент, датчик угла, фазовый детектор отрицательной обратной связи, интегрирующий усилитель. Генератор опорного напряжения соединен как с входом датчика угла, так и с входом фазового детектора отрицательной обратной связи. Выход компаратора соединен последовательно по информационным входам с входом датчика момента через преобразователь уровня, пару ждущих синхронных генераторов, реверсивный двоичный счетчик, суммирующий двоичный счетчик, выход которого соединен с одним из входов схемы сравнения, пороговый элемент, электронный ключ, генератор тока, соединенный с входом электронного ключа. Генератор вспомогательной частоты соединен с входами компаратора, пары ждущих синхронных генераторов, суммирующего двоичного счетчика и реверсивного двоичного счетчика. Один из выходов фазового детектора отрицательной обратной связи соединен с входом датчика момента через фильтр. На вход компаратора введена стабилизирующая цепь, содержащая два контура, вход которой соединен с выходом фазового детектора отрицательной обратной связи. Выход реверсивного двоичного счетчика является цифровым выходом компенсационного акселерометра. Технический результат заключается в возможности измерения ускорений, при этом компенсационный акселерометр работает в автоколебательном режиме, с астатизмом и с расширенной полосой пропускания и значительным быстродействием. 3 ил.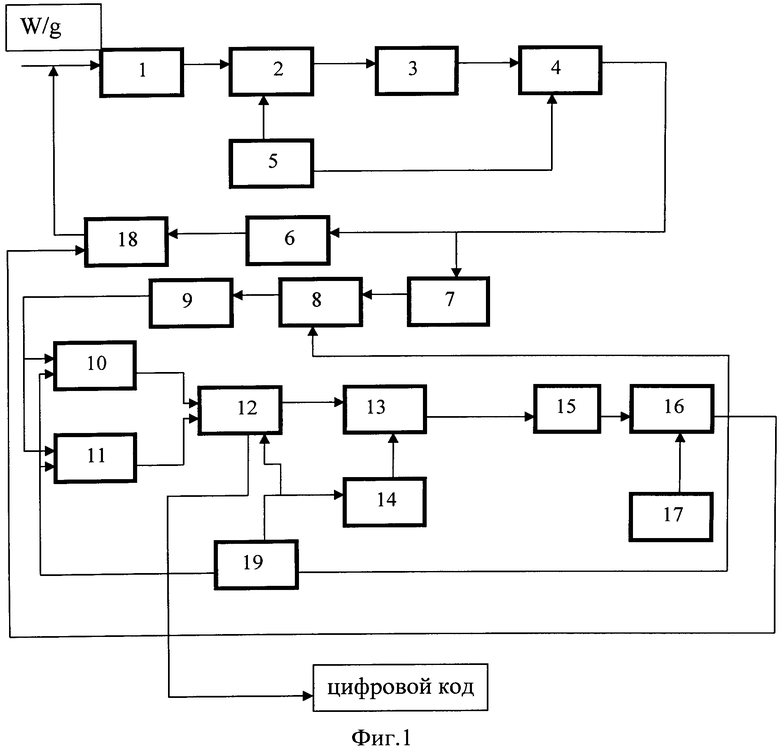
Компенсационный акселерометр, содержащий чувствительный элемент, угловое положение которого фиксируется датчиком угла, фазовый детектор отрицательной обратной связи, соединенный с выходом датчика угла через интегрирующий усилитель, генератор опорного напряжения, выходы которого соединены с входами датчика угла и фазового детектора отрицательной обратной связи, последовательно соединенные по информационным входам с выхода компаратора на вход схемы сравнения - преобразователь уровня, пара ждущих синхронных генераторов, реверсивный двоичный счетчик, а также суммирующий двоичный счетчик, выход которого соединен с одним из входов схемы сравнения, пороговый элемент, выход которого соединен с одним из входов датчика момента через электронный ключ, а вход с выходом схемы сравнения, генератор тока, соединенный с входом электронного ключа, генератор вспомогательной частоты, соединенный с входами компаратора, пары ждущих синхронных генераторов, суммирующего двоичного счетчика и реверсивного двоичного счетчика, отличающийся тем, что в него введены с выходов фазового детектора отрицательной обратной связи на один из входов датчика момента фильтр с передаточной функцией 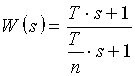

| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2397498C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2415442C1 |
| US 5396439 A, 07.03.1995 | |||
| US 3646818 A, 07.03.1972 | |||
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 2009 |
|
RU2411522C1 |

