Область техники, к которой относится изобретение
Настоящее изобретение относится к электроинструменту, в котором в качестве источника энергии используется электрический двигатель. В частности, настоящее изобретение относится к усовершенствованному электроинструменту, двигатель которого может работать при заданных частоте вращения и вращающем моменте даже при непостоянстве входного напряжения, подаваемого от источника питания переменного тока.
Уровень техники
В электроинструментах в качестве источника энергии для привода рабочего инструмента широкое применение нашел электрический двигатель переменного тока, как это раскрыто в публикации JP-A-2011-148069. При использовании электрического двигателя, питающегося переменным током, выходная мощность электроинструмента выше, чем у аккумуляторного электроинструмента с электродвигателем постоянного тока, а также возможна длительная работа электроинструментом. С другой стороны, при использовании переменного тока для питания электроинструмента необходимо подсоединять шнур питания к розетке. Соответственно, по сравнению с переносным электроинструментом, имеющим аккумуляторную батарею, выбор мест, подходящих для работы питающимся от сети, т.е. сетевым, электроинструментом, может быть ограничен. Если электроинструмент, использующий энергию переменного тока, применяется там, где электрическая розетка отсутствует, для подачи питания от розетки 105 к электроинструменту 101 часто используют намотанный на катушку 103 удлинительный шнур 104, как показано на фиг. 10. В этом случае катушку 103 удлинительного шнура помещают там, где к ней можно подсоединить шнур питания 102, выходящий из электроинструмента 101. В реальных условиях эксплуатации электроинструментов часто используется удлинительный шнур 104 длиной приблизительно 100 м или более.
Раскрытие сущности изобретения
Техническая проблема
Если шнур питания 102 подключен к розетке 105 через длинный удлинительный шнур 104, как это известно из уровня техники, то помимо факторов нестабильности напряжения промышленной сети, получаемого из розетки 105, нельзя не учитывать влияние падения напряжения, обусловленного прохождением тока через удлинительный шнур 104. Соответственно возникает проблема, что вращающий момент или частота вращения двигателя, т.е. ротора двигателя, электроинструмента 101 становятся ниже соответствующих номинальных показателей. Например, в случае питания переменным током промышленной сети напряжением 230 вольт применение удлинительного шнура 104 длиной 100 метров с площадью поперечного сечения проводов 2 мм2 и погонным сопротивлением переменному току 11,8 Ом/км вызывает при силе тока 10 А падение напряжения, составляющее около 11,8 вольт. Соответственно, напряжение, подводимое к электроинструменту 101, падает по сравнению с номинальным напряжением 230 вольт более чем на 5%. С увеличением длины шнура питания падение напряжения, вызываемое применением удлинительного шнура 104, увеличивается. Кроме того, разброс показателей мощности электроинструмента 101 увеличивается в ситуации, когда нестабильно само напряжение переменного тока в промышленной сети. Даже для аккумуляторного электроинструмента в конфигурации, когда аккумуляторная батарея подключена к электроинструменту не напрямую, а через шнур, на работе электроинструмента будет сказываться падение напряжения, обусловленное прохождением тока через шнур.
Изобретение было создано с учетом описанных выше ситуаций, и его целью является разработка электроинструмента, способного сохранять номинальную выходную мощность даже при определенной степени непостоянства напряжения питания, подаваемого в электроинструмент.
Еще одной целью настоящего изобретения является разработка электроинструмента, который может эксплуатироваться с получением на выходе номинальной мощности даже при падении напряжения, обусловленном использованием удлинительного шнура, за счет установки коэффициента заполнения (КЗ) подаваемого в двигатель сигнала на значение, меньшее 100%, при номинальной мощности питания.
Еще одной целью настоящего изобретения является разработка электроинструмента, способного реализовать управление двигателем, устойчивое к изменениям входного напряжения питания, без увеличения производственных затрат.
Решение проблемы
Ниже излагаются аспекты настоящего изобретения:
Согласно одному аспекту настоящего изобретения предложен электроинструмент, содержащий: двигатель, управляемый при помощи широтно-импульсной модуляции (ШИМ) посредством полупроводникового ключевого, или переключающего, элемента с использованием энергии от источника питания; передаточный механизм, выполненный с возможностью передачи вращения двигателя, т.е. его ротора, на рабочий инструмент для приведения рабочего инструмента в движение; и контроллер, обеспечивающий управление вращением двигателя посредством коэффициента заполнения сигнала широтно-импульсной модуляции (ШИМ-сигнала), причем контроллер выполнен с возможностью установки коэффициента заполнения на опорное значение, меньшее 100%, если приложенное к электроинструменту напряжение питания находится в заданном диапазоне, включающем номинальное напряжение электроинструмента, и с возможностью управления двигателем с установкой коэффициента заполнения на значение выше опорного, если приложенное к электроинструменту напряжение питания находится ниже заданного диапазона, включающего номинальное напряжение.
В предлагаемом электроинструменте источником питания может быть источник переменного тока, подаваемого извне через шнур питания, в корпусе электроинструмента может быть предусмотрена выпрямительная схема, обеспечивающая выпрямление подаваемого переменного тока, а в качестве двигателя может использоваться бесщеточный двигатель постоянного тока, управляемый посредством инверторной схемы.
В предлагаемом электроинструменте опорное значение коэффициента заполнения может составлять менее 90%, и если приложенное к электроинструменту напряжение питания ниже номинального напряжения, контроллер может управлять двигателем с увеличением коэффициента заполнения, причем верхний предел увеличенного коэффициента заполнения равен 100%.
В предлагаемом электроинструменте контроллер может устанавливать коэффициент заполнения на значение выше опорного, если потенциальная разность между первым напряжением питания, прикладываемым к электроинструменту до пуска двигателя, и вторым напряжением питания, прикладываемым к электроинструменту после пуска двигателя, стала большой.
В предлагаемом электроинструменте контроллер может определять коэффициент заполнения на основании второго напряжения в течение заданного времени сразу после нажатия клавиши пускового выключателя для приведения двигателя во вращение.
В предлагаемом электроинструменте контроллер может управлять двигателем с увеличением коэффициента заполнения, если во время вращения двигателя второе напряжение уменьшилось.
В предлагаемом электроинструменте контроллер может управлять двигателем в режиме, в котором коэффициент заполнения, определенный с использованием второго напряжения сразу после нажатия клавиши пускового выключателя, зафиксирован до возврата клавиши пускового выключателя в исходное положение.
Предлагаемый электроинструмент также может содержать задатчик частоты вращения, выполненный с возможностью установки нескольких уровней максимальной частоты вращения двигателя, причем коэффициент заполнения может устанавливаться на несколько ступеней в диапазоне от нуля до опорного значения пропорционально устанавливаемым уровням частоты вращения.
В соответствии с еще одним аспектом настоящего изобретения предложен электроинструмент, содержащий: двигатель, управляемый при помощи широтно-импульсной модуляции (ШИМ) посредством полупроводникового ключевого элемента с использованием энергии от источника питания; передаточный механизм, выполненный с возможностью передачи вращения двигателя на рабочий инструмент для приведения рабочего инструмента в движение; и контроллер, обеспечивающий управление вращением двигателя посредством коэффициента заполнения ШИМ-сигнала, причем контроллер выполнен с возможностью установки коэффициента заполнения до пуска двигателя на значение, меньшее 100%, и с возможностью увеличения коэффициента заполнения, если после пуска двигателя напряжение питания, приложенное к электроинструменту, стало ниже номинального напряжения электроинструмента.
В соответствии с еще одним аспектом настоящего изобретения предложен электроинструмент, содержащий: двигатель, управляемый при помощи широтно-импульсной модуляции (ШИМ) посредством полупроводникового ключевого элемента с использованием энергии от источника питания; передаточный механизм, выполненный с возможностью передачи вращения двигателя на рабочий инструмент для приведения рабочего инструмента в движение; и контроллер, обеспечивающий управление вращением двигателя посредством коэффициента заполнения ШИМ-сигнала, причем контроллер выполнен с возможностью установки коэффициента заполнения до пуска двигателя на значение, меньшее 100%, и с возможностью управления двигателем при коэффициенте заполнения, более высоком, чем ранее установленный коэффициент заполнения, если напряжение питания, приложенное к электроинструменту после пуска двигателя, стало ниже напряжения питания до пуска двигателя.
В предлагаемом электроинструменте напряжение источника питания может подаваться в электроинструмент через шнур питания, причем состоянием двигателя до пуска может быть состояние до прохождения тока через двигатель, а состоянием двигателя после пуска - состояние прохождения тока через двигатель.
Полезные эффекты, обеспечиваемые изобретением
Настоящее изобретение позволяет создать электроинструмент, в котором при нестабильности питания, а соответственно, при колебаниях напряжения, или при падении напряжения, обусловленном прохождением тока через удлинитель, кабель питания и т.д., предотвращается уменьшение вращающего момента или частоты вращения двигателя и обеспечивается устойчивость работы.
Указанные выше и другие цели, достигаемые изобретением, а также особенности настоящего изобретения рассматриваются ниже в подробном описании осуществления изобретения и на поясняющих его чертежах.
Краткое описание чертежей
На чертежах показано:
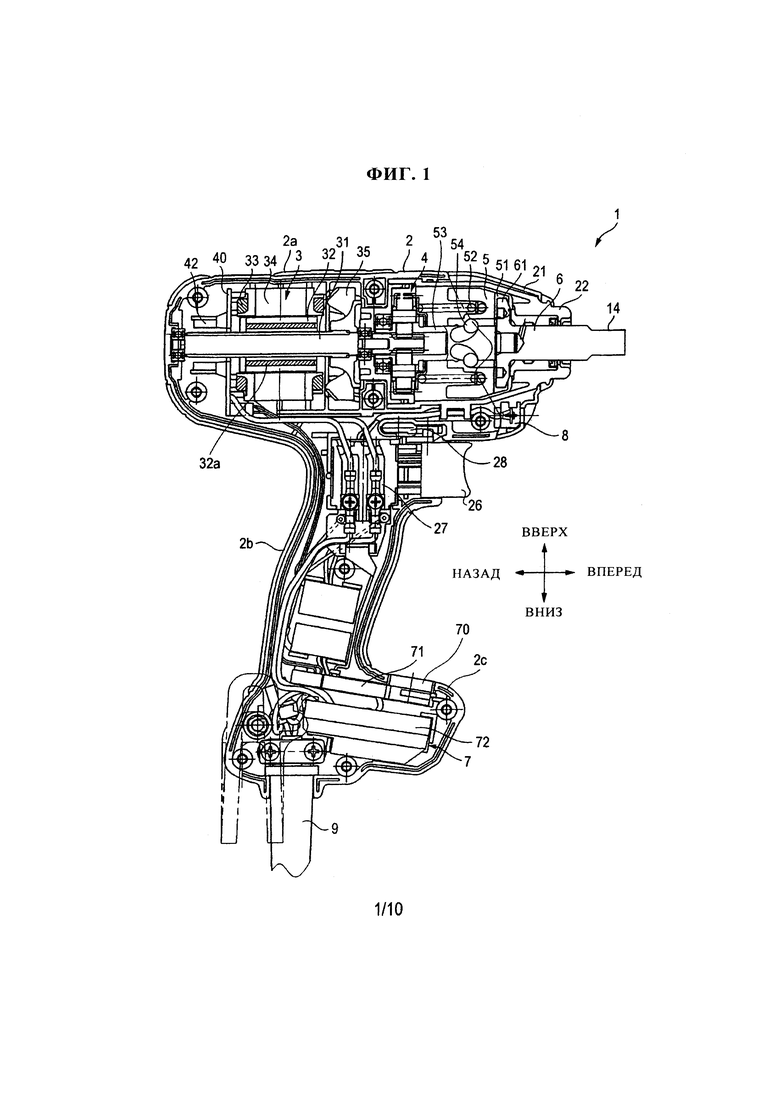
на фиг. 1 - продольный разрез ударного гайковерта, соответствующего примеру осуществления настоящего изобретения;
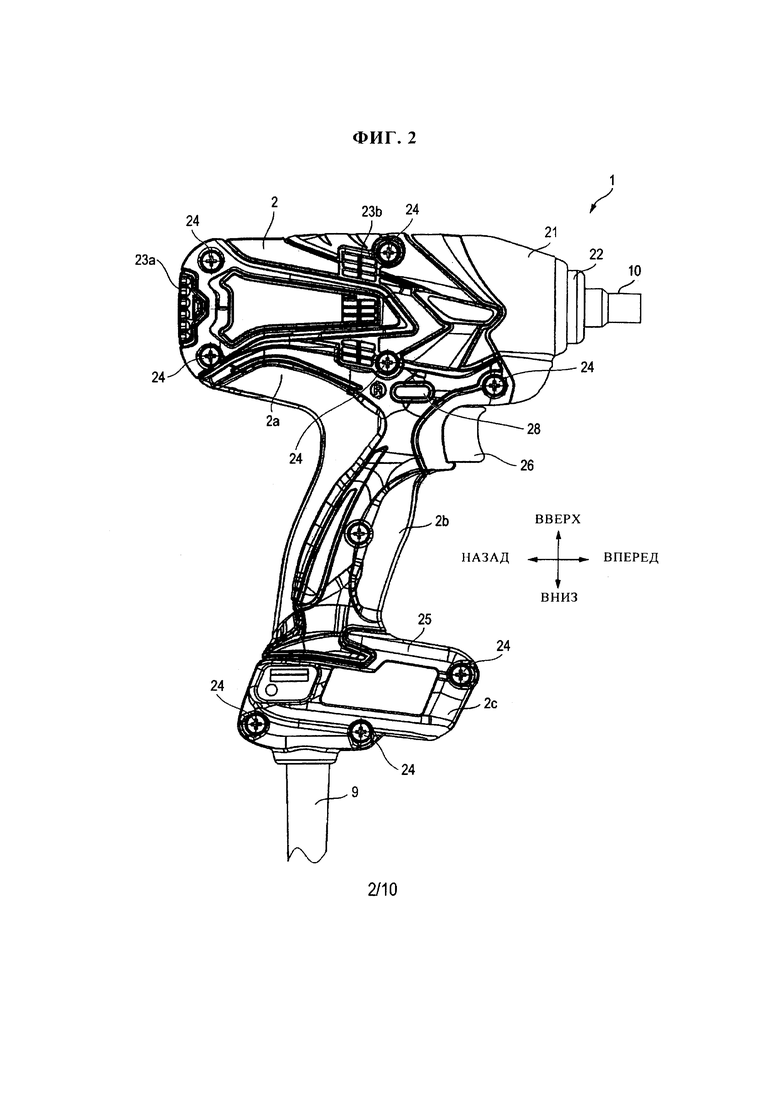
на фиг. 2 - вид сбоку ударного гайковерта, соответствующего примеру осуществления настоящего изобретения;
на фиг. 3 - частичный вид сзади ударного гайковерта, соответствующего примеру осуществления настоящего изобретения;
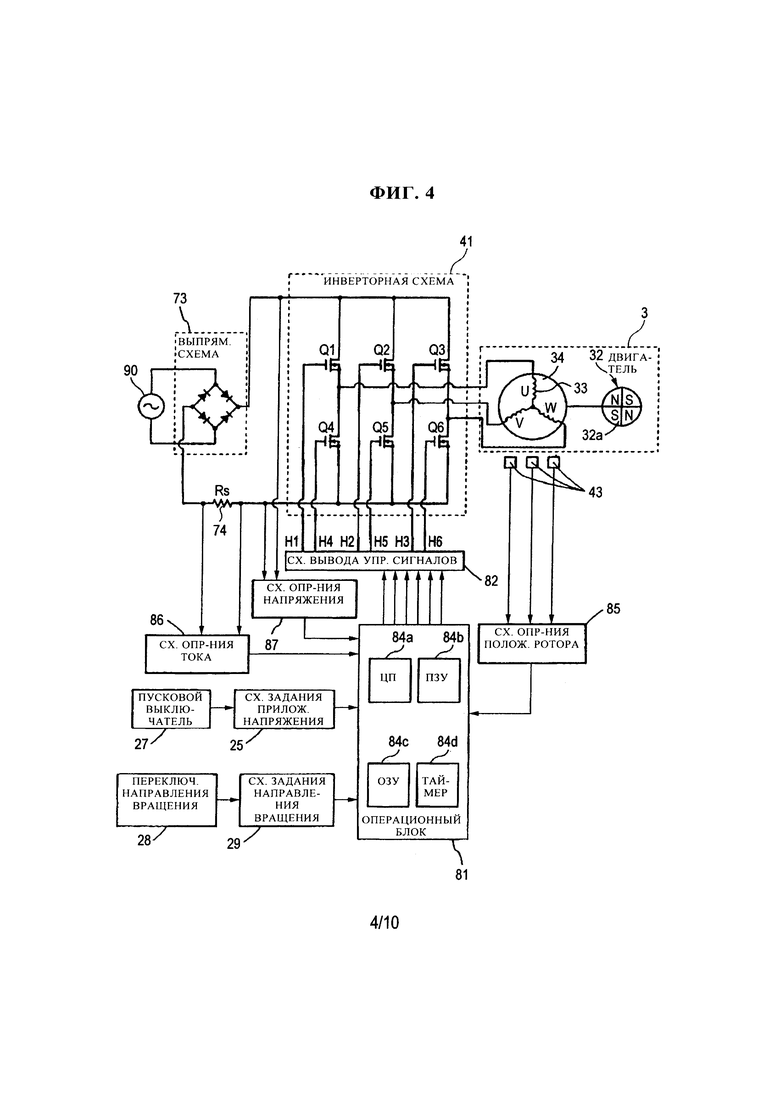
на фиг. 4 - структурная схема системы управления двигателем 3 в ударном гайковерте, соответствующем примеру осуществления настоящего изобретения;
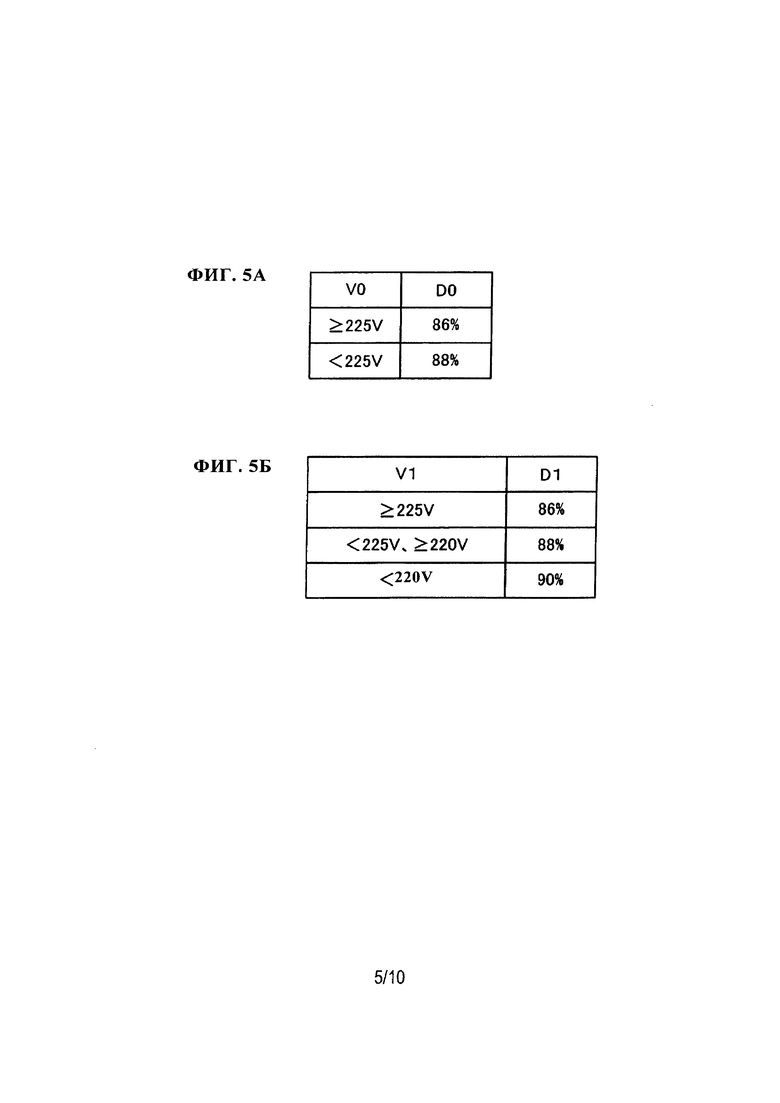
на фиг. 5А и 5Б - схемы, поясняющие соотношение между установленным коэффициентом заполнения, входным напряжением V0 без нагрузки и напряжением V1 под нагрузкой;
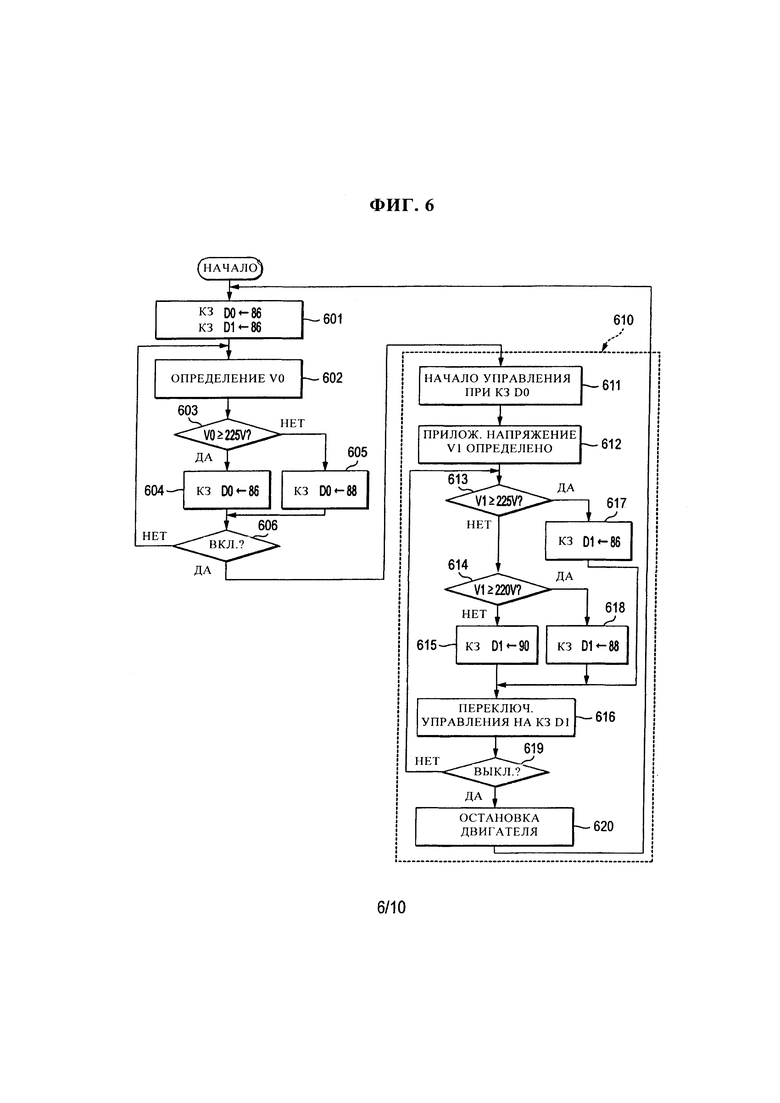
на фиг. 6 - блок-схема процесса управления вращением двигателя в примере (первом варианте) его осуществления;
на фиг. 7 - блок-схема процесса управления вращением двигателя во втором варианте его осуществления;
на фиг. 8 - блок-схема процесса управления вращением двигателя в третьем варианте его осуществления;
на фиг. 9 - блок-схема процесса управления вращением двигателя в четвертом варианте его осуществления; и
на фиг. 10 - изображение, иллюстрирующее пример использования электроинструмента.
Описание вариантов осуществления изобретения
Первый вариант осуществления изобретения
Ниже со ссылкой на чертежи рассматривается пример (иллюстративный вариант) осуществления настоящего изобретения. На чертежах в качестве примера электроинструмента рассматривается ударный гайковерт, также называемый гайковертом ударно-импульсного действия или импульсным гайковертом, причем на разных чертежах одни и те же компоненты обозначены одинаковыми номерами позиций, а их повторное описание опускается. В приведенном ниже описании вертикальное направление ("вверх-вниз"), поперечное направление ("вправо-влево") и продольное направление ("вперед-назад") и соответствуют направлениям, показанным на чертежах.
Как показано на фиг. 1, ударный гайковерт 1 содержит корпус 2, двигатель 3, редуктор 4, ударник 5, наковальню 6, источник 8 света, управляющее устройство 7 и шнур питания 9. На наковальне 6, т.е. выходном валу, установлен рабочий инструмент (на чертежах не показан). На фиг. 1 показан держатель 14, на который в качестве рабочего инструмента может быть установлен переходник с шестигранным гнездом. Вместо держателя 14 может быть предусмотрено монтажное отверстие и удерживающий механизм, в которые можно устанавливать одним движением рабочую насадку (биту) с шестигранным поперечным сечением или другие рабочие инструменты. Корпус ударного гайковерта 1 как таковой образован пластмассовым корпусом 2 и металлическим корпусом 22 ударного механизма. Корпус 22 ударного механизма обрезинен, т.е. снабжен защитным слоем 21. Внутри корпуса 22 ударного механизма размещены редуктор 4, а также ударный механизм. Передний конец наковальни 6 выступает наружу через сквозное отверстие на передней торцевой стороне корпуса 22 ударного механизма. Корпус 2 имеет три части: верхнюю, основную, часть 2а, среднюю, рукояточную, часть 2b и нижнюю, вмещающую электронные платы, часть 2с. Основная часть 2а корпуса имеет по существу цилиндрическую форму. Рукояточная часть 2b корпуса выполнена выступающей из основной части 2а корпуса в по существу вертикальном направлении. Нижняя часть 2 с корпуса образована на нижнем концевом участке (со стороны, противоположной основной части 2а корпуса) рукояточной части 2b корпуса. Двигатель 3, редуктор 4, ударник 5 и наковальня 6 расположены друг за другом в направлении оси вращения. Вращение двигателя 3 передается рабочему инструменту через редуктор 4 и ударный механизм, содержащий ударник 5 и наковальню 6. В данном варианте осуществления изобретения в качестве примера электроинструмента рассматривается ударный гайковерт, имеющий передаточный механизм. Передаточный механизм состоит из редуктора 4 и ударного механизма. Однако этот вариант не ограничивает возможных вариантов исполнения передаточного механизма, и в электроинструменте может использоваться другой передаточный механизм либо электроинструмент может комплектоваться другим рабочим инструментом.
Из рукояточной части 2b корпуса выступает клавиша 26 (гашетка или курок) пускового выключателя. Клавиша 26 соединена с пусковым выключателем 27, расположенным в рукояточной части 2b корпуса для установки скорости вращения двигателя 3. Непосредственно над клавишей 26 пускового выключателя расположен переключатель 28 направлений вращения (орган 10 переключения направления вращения). Переключатель 28 направлений вращения расположен в области соединения рукояточной части 2b корпуса и основной части 2а корпуса и переключает направление вращения двигателя 3 с прямого на обратное и наоборот. Источником 8 света является светоизлучающий диод. Источник 8 света включается при нажатии кнопки включения подсветки (на чертежах не показана) или клавиши 26 пускового выключателя. Источник 8 света подсвечивает рабочий инструмент и рабочую зону. Таким образом, оператор может работать электроинструментом, используя яркий свет от источника 8 света, даже в темном месте.
Управляющее устройство 7 расположено в нижней части 2с корпуса и управляет вращением двигателя 3. С нижней стороны из нижней части 2с корпуса выходит шнур питания 9 для подачи энергии в электроинструмент извне. На верхней стороне нижней части 2с корпуса предусмотрена панель управления 70, позволяющая устанавливать несколько уровней максимальной частоты вращения двигателя. Оператор может устанавливать три уровня частоты вращения двигателя: низкий, средний и высокий, путем нажатия кнопки (на чертежах не показана) на панели управления 70. Управляющее устройство 7 включает в себя печатную плату 71 управления и печатную плату 72 питания, которые в основном расположены в нижней части 2с корпуса. Управляющее устройство 7 управляет скоростью вращения двигателя 3 путем регулирования количества подаваемой в двигатель 3 энергии в соответствии со степенью нажатия клавиши 26 пускового выключателя. На печатной плате 72 питания смонтирован диодный мост (на чертежах не показан). Диодный мост выпрямляет и преобразует переменный ток промышленной сети в постоянный ток (например, преобразует переменный ток напряжением 100 вольт в постоянный ток напряжением 140 вольт).
Двигатель 3 представляет собой бесщеточный (бесколлекторный) электродвигатель постоянного тока. Двигатель 3 содержит выходной вал 31, проходящий в продольном направлении, ротор 32, жестко соединенный с выходным валом 31 и имеющий несколько магнитов 32а, и статор 34, расположенный таким образом, чтобы окружать ротор 32, и имеющий несколько обмоток (статорные обмотки) 33. Двигатель 3 в рассматриваемом варианте осуществления изобретения представляет собой трехфазный двигатель с четырехполюсным ротором и шестипазовым статором. Вместе с тем, число полюсов и число пазов не ограничиваются этими значениями. Может использоваться бесщеточный двигатель постоянного тока, имеющий другое число полюсов и пазов. Спереди двигателя 3 на его выходном валу 31 установлен вентилятор 35 охлаждения, расположенный между двигателем 3 и редуктором 4. Вентилятор 35 охлаждения всасывает воздух через впускные отверстия 23а (см. фиг. 2), вращаясь вместе с ротором двигателя 3. Вентилятор 35 охлаждения обеспечивает обтекание всасываемым воздухом всех частей двигателя 3, тем самым охлаждая двигатель. Прогоняемый вентилятором 35 охлаждения воздух выбрасывается наружу через описываемые ниже выпускные отверстия 23b (см. фиг. 2). С задней, в осевом направлении, стороны двигателя 3 расположена печатная плата 40. Печатная плата 40 предусмотрена для монтажа инвертора в направлении, по существу перпендикулярном направлению оси выходного вала 31. Печатная плата 40 выполнена в виде двусторонней платы и по существу круглой формы. Контур печатной платы 40 в основном соответствует контуру двигателя 3. На печатной плате смонтирован ключевой (переключающий) элемент 42, выполненный в виде полупроводникового прибора, например полевой транзистор (ПТ), или датчик положения ротора (на чертежах не показан), например интегральная схема Холла.
Редуктор 4 выполнен в виде планетарного зубчатого механизма, имеющего несколько зубчатых колес. Редуктор 4 обеспечивает понижение скорости вращения выходного вала 31 в соответствии с заданным передаточным числом и передачу этого вращения на шпиндель 53. В данном случае шпиндель 53 и ударник 5 соединены друг с другом посредством кулачкового механизма. Кулачковый механизм образован V-образным направляющим пазом, выполненным в наружной боковой поверхности шпинделя 53, направляющим пазом, выполненным во внутренней боковой поверхности ударника 5, и шариком 54, взаимодействующим со стенками этих пазов. Ударник 5 приводится во вращение шпинделем 53 и на своем переднем торце имеет ударяющую часть 51. Ударяющая часть 51 образована выступом, выдающимся вперед в осевом направлении. Наковальня 6 на своем заднем торце имеет ударяемую часть 61. Ударяемая часть 61 образована впадиной, проходящей в радиальном направлении. При вращении ударника 5 ударяющая часть 51 сталкивается в направлении вращения с ударяемой частью 61. Ударяющая часть 51 и ударяемая часть 61 выполнены симметрично в двух противоположных местах в плоскости вращения ударника 5 и наковальни 6. Ударник 5 постоянно поджат вперед пружиной 52. При остановке ударника взаимодействие шарика 54 и пазов обеспечивает перемещение ударника 5 в положение, отделенное промежутком от торцевой поверхности ударяемой части 61 наковальни 6.
Во время вращения шпинделя 53 это вращение передается через кулачковый механизм на ударник 5. При совершении ударником 5 половины оборота ударяющая часть 51 ударника 5 входит в зацепление с ударяемой частью 61 наковальни 6, вращая наковальню 6. В это время за счет нарастания реакции со стороны зацепления шпиндель 53 и ударник 5 проворачиваются относительно друг друга, и ударник 5 начинает отходить в направлении двигателя 3 вдоль паза кулачкового механизма, выполненного в поверхности шпинделя, сжимая пружину 52. Дальнейший отход ударника 5 назад позволяет ударяющей части 51 ударника 5 выйти за пределы ударяемой части 61 наковальни 6, в результате чего ударник 5 выходит из зацепления с наковальней 6. В этом случае ударник 5 под действием силы упругости пружины 52 приходит в движение, быстро ускоряясь в направлении вращения и вперед, под действием кулачкового механизма и накопившейся в пружине 52 энергии упругой деформации, в дополнение к вращающему моменту шпинделя 53. Ударяющая часть 51 ударника 5 снова входит во взаимодействие с ударяемой частью 61 наковальни 6, чтобы начать вращаться с ней как одно целое. В этот момент ударником по наковальне 6 наносится сильный тангенциальный, т.е. приложенный в направлении вращения, удар. Соответственно, этот тангенциальный удар передается на рабочий инструмент (на чертежах не показан), установленный на держателе 14 на переднем конце наковальни 6. После этого описанный цикл повторяется, в результате чего тангенциальные импульсы периодически и часто передаются с рабочего инструмента на болт или аналогичный резьбовой крепежный элемент. Таким образом происходит затяжка резьбового соединения.
На фиг. 2 приведен вид сбоку, на котором показан внешний вид ударного гайковерта 1 в рассматриваемом примере осуществления настоящего изобретения. Корпус 2 образован двумя соединенными полуоболочками, расположенными, глядя в продольном направлении, слева и справа. Левая и правая полуоболочки корпуса 2 скреплены между собой несколькими винтами 24. В задней торцевой поверхности основной части 2а корпуса образовано несколько впускных отверстий 23а для забора атмосферного воздуха. Слева и справа в основной части 2а корпуса, в районе периферии вентилятора 35 охлаждения (см. фиг. 1) образовано несколько выпускных отверстий 23b для выпуска атмосферного воздуха, прошедшего через корпус 2.
На фиг. 3 приведен вид частичный сзади ударного гайковерта 1 в рассматриваемом примере осуществления настоящего изобретения. Впускные отверстия 23а, предусмотренные сзади основной части 2а корпуса, выполнены в левой и правой полуоболочках корпуса 2. Впускные отверстия 23а могут быть довольно большими, чтобы обеспечивать поступление в корпус достаточного количества атмосферного воздуха. Основная часть 2а корпуса 2 имеет цилиндрическую форму, внутренняя стенка которой в основном соответствует наружному диаметру двигателя 3. Под основной частью 2а корпуса расположена выступающая вниз рукояточная часть 2b, размер которой в поперечнике меньше соответствующего размера основной части 2а корпуса.
Далее со ссылкой на фиг. 4 описывается конфигурация и принцип действия системы управления двигателем 3. На фиг. 4 приведена структурная схема, поясняющая конфигурацию системы управления двигателем. В рассматриваемом варианте осуществления изобретения двигатель 3 выполнен в виде трехфазного бесщеточного двигателя постоянного тока. Двигатель 3 относится к типу двигателей с внутренним расположением ротора (так называемый внутрироторный двигатель) и содержит ротор 32, три датчика 43 положения ротора и статор 34. Ротор 32 выполнен со встроенным в него магнитом 32а (постоянный магнит), имеющим пары полюсов N и S. Датчики 43 положения ротора расположены по окружности через каждые 60° с возможностью определения углового положения ротора 32, т.е. его положения по углу поворота. Статор 34 состоит из трехфазных обмоток U, V, W включенных по схеме звезды. Управление запитыванием трехфазных обмоток U, V, W осуществляется на основании сигналов от датчиков 43 положения ротора с интервалом, соответствующим электрическому углу 120°.
Основными компонентами инверторной схемы 41, смонтированной на печатной плате 40, являются шесть полевых транзисторов Q1-Q6 (далее называемых просто транзисторами) и диод-маховик (на чертежах не показан). Шесть транзисторов Q1-Q6 соединены по трехфазной мостовой схеме. В рассматриваемом варианте осуществления изобретения, где используется источник 90 переменного тока, на вход инверторной схемы 41 подается постоянный ток из выпрямительной схемы 73, выполненной в виде диодного моста. Для уменьшения пульсации выходного тока в выпрямительной схеме 73 обычно используется сглаживающий конденсатор или подобный ему компонент. Однако в рассматриваемом варианте осуществления изобретения выход выпрямительной схемы 73 подключен к инверторной схеме 41 напрямую, без включения между ними конденсатора. Разумеется, может использоваться и сглаживающий конденсатор. Каждый затвор шести транзисторов Q1-Q6, соединенных по мостовой схеме, соединен со схемой 82 вывода управляющих сигналов. Кроме того, исток или сток шести транзисторов Q1-Q6 соединен со статорными обмотками U, V, W, соединенными по мостовой схеме. Таким образом, шесть транзисторов Q1-Q6 выполняют операции переключения (коммутации) на основании управляющих сигналов для управления ключевыми элементами, снимаемых с выхода схемы 82 вывода управляющих сигналов. Шесть транзисторов Q1-Q6, используя приложенное к инверторной схеме 41 напряжение постоянного тока, подают на статорные обмотки U, V, W энергию в виде напряжений Vu, Vv, Vw трехфазного (фазы U, V и W) переменного тока.
На печатной плате 71 управления смонтирована схема управления (контроллер). В состав схемы управления входят операционный блок 81, схема 86 определения тока, схема 87 определения напряжения, схема 25 задания прикладываемого напряжения, схема 29 задания направления вращения, схема 85 определения положения ротора, схема 82 вывода управляющих сигналов и т.д. Операционный блок 81 содержит центральный процессор (ЦП) 84а для выдачи управляющего сигнала на основе обрабатывающей программы и данных, постоянное запоминающее устройство (ПЗУ) 84b для хранения данных или программы, используемых для управления по определенному алгоритму (описывается ниже), оперативное запоминающее устройство с произвольной выборкой (ОЗУ) 84с для временного хранения данных, таймер 84d и т.д. Например, операционный блок 81 может быть реализован с использованием микрокомпьютера, содержащего вышеперечисленные компоненты. Схема 86 определения тока представляет собой средство определения тока, вводимого в инверторную схему 41, путем измерения напряжения на шунтирующем резисторе 74. Зарегистрированый ток подается в операционный блок 81. Таким образом, операционный блок 81 может отслеживать значение тока, проходящего через двигатель 3. В рассматриваемом варианте осуществления изобретения шунтирующий резистор 74 расположен между выпрямительной схемой 73 и инверторной схемой 41, тем самым позволяя определять значение тока, проходящего через полупроводниковый ключевой элемент. Вместе с тем, шунтирующий резистор 74 может быть расположен между инверторной схемой 41 и двигателем 3, тем самым позволяя непосредственно определять ток, проходящий через двигатель 3.
Схема 25 задания прикладываемого напряжения подает в операционный блок 81 предварительно заданное напряжение в ответ на перемещение клавиши 26 пускового выключателя. В соответствии с этим предварительно заданным напряжением операционный блок 81 устанавливает подаваемое в двигатель 3 напряжение, т.е. коэффициент заполнения (КЗ) сигнала широтно-импульсной модуляции (ШИМ-сигнала). Схемой 29 задания направления вращения является схема, задающая направление вращения двигателя 3 путем определения того, находится ли орган 10 переключения направления вращения (переключатель 28 направлений вращения) двигателя 3 в состоянии, соответствующем прямому или обратному вращению. Схемой 85 определения положения ротора является схема, определяющая взаимное положение ротора 32 и обмоток U, V, W статора 34 по сигналам на выходе трех датчиков 43 положения ротора. Схема 82 вывода управляющих сигналов выдает на транзисторы Q1-Q6 ШИМ-сигналы на основании сигналов на выходе операционного блока 81. Подача энергии на каждую из статорных обмоток U, V, W регулируется путем управления шириной импульсов ШИМ-сигнала, что позволяет управлять частотой вращения двигателя 3 в заданном направлении вращения. Хотя на фиг. 4 это не показано, в операционный блок 81 также поступает выходной сигнал переключателя скоростей вращения двигателя 3, используемый для переключения значений вращающего момента (или частоты вращения двигателя). Операционный блок 81 служит задатчиком частоты вращения, устанавливающим максимальную частоту вращения двигателя 3 в соответствии с вышеупомянутым выходным сигналом. Это касается описываемого ниже способа управления вращением двигателя. В частности, если начальный коэффициент заполнения D0 установлен на значение 86%, то при установке максимального уровня частоты вращения "высоким" коэффициент заполнения сигналов напряжения питания двигателя 3 будет регулироваться в диапазоне от 0 до 86%, при установке максимального уровня частоты вращения "средним" коэффициент заполнения сигналов напряжения питания двигателя 3 будет регулироваться в диапазоне от 0 до 66%, а при установке максимального уровня частоты вращения "низким" коэффициент заполнения сигналов напряжения питания двигателя 3 будет регулироваться в диапазоне от 0 до 46%. Кроме того, хотя на фиг. 4 это не показано, с операционным блоком 81 связана схема подсветки, управляющая источником 8 света, выполненным в виде светоизлучающего диода или иного подобного источника и используемым для освещения зоны вокруг рабочего инструмента.
Далее со ссылкой на фиг. 5А, 5Б и фиг. 6 описывается способ управления вращением двигателя 3 согласно рассматриваемому примеру (первому варианту) осуществления настоящего изобретения. Важнейшей особенностью изобретения в данном примере его осуществления является то, что в качестве двигателя 3 используется высокомощный двигатель, способный достигать частоты вращения и вращающего момента, более высоких, чем необходимо для выдачи номинальной выходной мощности, и если напряжение питания соответствует номинальному, то даже при настройке выходной мощности электроинструмента на максимальный уровень электроинструмент будет работать в режиме ограничения мощности, в котором высокомощный двигатель не развивает всей своей мощности. На фиг. 5А и 5Б приведены схемы, поясняющие связь между коэффициентом заполнения (опорный коэффициент заполнения), входным напряжением V0 без нагрузки и напряжением V1 под нагрузкой. Коэффициент заполнения задается и используется для управления вращением двигателя 3. Операционный блок 81 посредством схемы 87 определения напряжения соответственно измеряет входное напряжение V0 без нагрузки непосредственно перед нажатием клавиши 26 пускового выключателя (или в промежутке времени от нажатия клавиши 26 пускового выключателя до пуска двигателя 3) и напряжение V1 под нагрузкой после пуска двигателя 3. Схема на фиг. 5А поясняет связь между входным напряжением V0 без нагрузки и начальным коэффициентом заполнения D0. При этом термин "коэффициент заполнения" относится к соотношению периода импульсного сигнала и ширины импульса в широтно-импульсном преобразователе (ШИП). ШИП осуществляет модуляцию путем изменения коэффициента заполнения импульсного сигнала, подаваемого в двигатель 3. Коэффициент заполнения D обычно представляют в виде: D=τ/Т, где τ - ширина импульса, Т - период. В обычном электроинструменте, когда при номинальном питании переменным током он работает на максимальной мощности, управление двигателем 3 осуществляется при коэффициенте заполнения 100%, т.е. двигатель 3 приводится в действие без импульсной модуляции. Поэтому тип используемого двигателя 3 выбирают таким образом, чтобы он соответствовал номинальному питанию и потребной номинальной выходной мощности. Однако в рассматриваемом варианте осуществления изобретения рабочая характеристика используемого двигателя 3 такова, что во время питания номинальным напряжением управление двигателем осуществляется при опорном коэффициенте заполнения D, составляющем около 86%. Это значит, что при коэффициенте заполнения D=100% во время питания номинальным напряжением двигатель 3 вышел бы на чрезмерно высокие обороты и не смог выдерживать тепловые нагрузки. Для получения такой характеристики двигателя достаточно уменьшить число витков в обмотках двигателя 3 и использовать толстую проволоку, способную пропускать большой ток. Таким образом, это не приведет к увеличению размеров самого двигателя 3 и стоимости его изготовления.
В рассматриваемом варианте осуществления изобретения, в ударном гайковерте 1 номинальным напряжением переменного тока 230 вольт (60 Гц), как показано на фиг. 5А, коэффициент заполнения (начальный коэффициент заполнения) D0 первоначально устанавливается на значение 86%, если измеренное входное напряжение V0 без нагрузки больше или равно 225 вольт. Если входное напряжение V0 без нагрузки составляет менее 225 вольт, коэффициент заполнения (начальный коэффициент заполнения) D0 первоначально устанавливается на значение на значение 88%. Таким образом двигатель 3 запускается. При пуске двигателя 3 через него проходит большой ток. Соответственно, если используется показанный на фиг. 10 удлинительный шнур 104, или если напряжение питания нестабильно, имеет место определенное падение напряжения. В рассматриваемом варианте осуществления изобретения после пуска двигателя 3 измеряется напряжение питания (напряжение V1 под нагрузкой) и в соответствии с измеренным напряжением V1 под нагрузкой во время вращения корректируется коэффициент заполнения D1. На фиг. 5Б показан соответствующий пример. Если напряжение V1 под нагрузкой больше или равно 225 вольт, коэффициент заполнения D1 по-прежнему составляет 86%. Если напряжение V1 под нагрузкой меньше 225 вольт, но больше или равно 220 вольт, коэффициент заполнения D1 повышается до 88%. Если же напряжение V1 под нагрузкой составляет менее 220 вольт, коэффициент заполнения D1 повышается до 90%. Для такого рода коррекции коэффициентов заполнения D0, D1 в соответствии с входным напряжением V0 без нагрузки и напряжением V1 под нагрузкой комбинации соответствующих значений предварительно сохраняются в ПЗУ 84b операционного блока 81 в качестве параметров, используемых при управлении двигателем 3 таким образом, чтобы компенсировать снижение выходной мощности ударного гайковерта 1, обусловленное непостоянством напряжения переменного тока. В данном случае значение 225 вольт может быть задано в качестве границы заданного диапазона, включающего номинальное напряжение 230 вольт. В рассматриваемом варианте осуществления изобретения при определении того, является ли напряжение под нагрузкой большим или равным 225 вольт, указанное значение используется как граница интервала ±5 вольт от номинального напряжения 230 вольт. Вместе с тем, значение опорного напряжения может задаваться иным подходящим образом.
На фиг. 6 приведена блок-схема процесса управления вращением двигателя согласно примеру осуществления настоящего изобретения. Этот процесс начинается при подсоединении шнура питания 9 ударного гайковерта 1 к розетке 105 или к катушке 103 удлинительного шнура, что приводит к включению микрокомпьютера, входящего в состав операционного блока 81. Центральным процессором 84а выполняется компьютерная программа, предварительно сохраненная в ПЗУ 84b, что позволяет реализовать показанную на фиг. 6 последовательность шагов программными средствами. Сначала, после включения питания, операционный блок 81 выполняет первоначальную установку значений начального коэффициента заполнения D0 и коэффициента заполнения под нагрузкой D1 на 86% (шаг 601). Затем операционный блок 81 на основании выходного сигнала схемы 87 определения напряжения определяет входное напряжение V0 без нагрузки (шаг 602). Затем операционный блок 81 определяет, является ли измеренное входное напряжение V0 без нагрузки большим или равным 225 вольт (шаг 603). При этом, определив, что входное напряжение V0 без нагрузки больше или равно 225 вольт, операционный блок 81 первоначально устанавливает коэффициент заполнения D0 на 86%, используя значения, хранящиеся в таблице на фиг. 5А (шаг 604). В случае определения того, что входное напряжение V0 без нагрузки составляет менее 225 вольт, операционный блок 81 первоначально устанавливает коэффициент заполнения D0 на 88% (шаг 605). Затем операционный блок 81 определяет, нажал ли оператор клавишу 26 пускового выключателя (шаг 606). При определении того, что клавиша 26 пускового выключателя не нажата, процесс возвращается к шагу 602. Если на шаге 606 установлено, что клавиша 26 пускового выключателя нажата, двигатель 3 начинает вращение (шаг 611). В рассматриваемом варианте осуществления изобретения пусковой выключатель 27 является выключателем с функцией плавного изменения скорости двигателя (электронное управление), так что частота вращения двигателя 3 изменяется пропорционально степени нажатия клавиши пускового выключателя. Соответственно, если клавиша 26 пускового выключателя нажата до упора, коэффициент заполнения D0 имеет определенное (максимальное) значение. Если же степень нажатия клавиши 26 пускового выключателя мала, например, если клавиша 26 пускового выключателя нажата наполовину, операционный блок 81 устанавливает коэффициент заполнения в соответствии с состоянием клавиши пускового выключателя по степени нажатия. Например, операционный блок 81 регулирует коэффициент заполнения в диапазоне от 0 до 86%. Между тем, в случае электроинструмента, в котором используется не емкостный пусковой выключатель с функцией плавного изменения скорости двигателя, а выключатель "включено-выключено", электроинструмент при нажатой клавише пускового выключателя работает при установленном коэффициенте заполнения D0.
Далее, после того как двигатель 3 запустился, операционный блок 81 на основании выходного сигнала схемы 87 определения напряжения определяет напряжение V1 под нагрузкой в этот момент (шаг 612). Затем операционный блок 81 определяет, является ли измеренное напряжение V1 под нагрузкой большим или равным 225 вольт (шаг 613). При определении того, что напряжение V1 под нагрузкой больше или равно 225 вольт, операционный блок 81 вновь устанавливает коэффициент заполнения D1 во время вращения на 86%, и процесс переходит к шагу 616 (шаг 617). Если же на шаге 613 установлено, что напряжение V1 под нагрузкой составляет менее 225 вольт, операционный блок 81 определяет, является ли напряжение V1 под нагрузкой большим или равным 220 вольт (шаг 614). При определении того, что напряжение V1 под нагрузкой больше или равно 220 вольт, операционный блок 81 переустанавливает коэффициент заполнения D1 во время вращения на 88%, и процесс переходит к шагу 616 (шаг 618). Если на шаге 614 установлено, что напряжение V1 под нагрузкой составляет менее 220 вольт, операционный блок 81 переустанавливает коэффициент заполнения D1 во время вращения на 90%, и процесс переходит к шагу 616 (шаг 615). Операционный блок 81 переключает коэффициент заполнения D1 на вновь заданное значение и возобновляет управление вращением двигателя (шаг 616). Если пусковой выключатель 27 еще включен, процесс возвращается к шагу 613 (шаг 616). Если пусковой выключатель 27 выключен, двигатель останавливается, и процесс возвращается к шагу 601 (шаг 620).
Выполняя описанные выше действия, операционный блок 81 управляет вращением двигателя 3 в диапазоне от 86 до 90% максимального значения коэффициента заполнения. Даже если подаваемое на ударный гайковерт 1 напряжение переменного тока упадет ниже номинального, предлагаемый способ управления компенсирует снижение мощности за счет увеличения коэффициента заполнения сигнала, подаваемого в управляемый двигатель 3, что позволяет зафиксировать номинальную выходную мощность ударного гайковерта 1. В рассматриваемом варианте осуществления изобретения максимальное значение коэффициента заполнения регулируется в диапазоне от 86 до 90%. Если же регулировать коэффициент заполнения в диапазоне от 86 до 100%, то номинальную выходную мощность можно поддерживать даже при падении подаваемого напряжения примерно до 200 вольт. Кроме того, вместо регулирования мощности двигателя 3 путем коррекции коэффициента заполнения D1, который определяется по напряжению V1, измеряемому сразу после нажатия клавиши 26 пускового выключателя и до возврата клавиши 26 пускового выключателя в исходное положение, операционный блок 81 может быть выполнен так, чтобы на шаге 619 процесс не возвращался к шагу 613, а система управления переходила в состояние готовности. Таким образом, во время работы электроинструмента переключений коэффициента заполнения D0 не будет.
Второй вариант осуществления изобретения
Далее описывается способ управления вращением двигателя во втором варианте осуществления настоящего изобретения, поясняемом блок-схемой на фиг. 7. Базовый способ управления во втором варианте осуществления изобретения аналогичен таковому в первом варианте. Однако процесс измерения входного напряжения V0 без нагрузки во втором варианте осуществления изобретения отличается от первого варианта. То есть вместо периодического измерения входного напряжения V0 без нагрузки, когда напряжение питания подключено, входное напряжение V0 без нагрузки измеряется в течение короткого времени сразу после нажатия клавиши пускового выключателя и до начала вращения двигателя, т.е. пуска двигателя. При этом состоянием двигателя 3 до пуска является состояние до прохождения тока через двигатель 3, а состоянием двигателя 3 после пуска является состояние прохождения тока через двигатель 3. Сначала к розетке 105 или к катушке 103 удлинительного шнура подсоединяют шнур питания 9 ударного гайковерта 1, что приводит к запуску микрокомпьютера, входящего в состав операционного блока 81. Далее выполняется первоначальная установка значений начального коэффициента заполнения D0 и коэффициента заполнения под нагрузкой D1 на 86% (шаг 701). Кроме того, обнуляется значение n счетчика для измерения числа моментов выборки. Затем операционный блок 81 определяет, включен ли пусковой выключатель 27. При определении того, что пусковой выключатель включен, процесс переходит к шагу 703. При определении того, что пусковой выключатель не включен, система управления переходит в состояние готовности (шаг 702). На шаге 703 происходит определение того, истек ли период выборки Т1 после включения пускового выключателя 27 или после ранее измеренного периода. Пока период выборки Т1 не истечет, система управления находится в состоянии готовности (шаг 703). После истечения периода выборки Т1 операционный блок 81 измеряет входное напряжение V0 без нагрузки и увеличивает значение счетчика n (шаг 704). Затем операционный блок 81 определяет, достигло ли число n моментов выборки заданного значения. При определении того, что число n моментов выборки не достигло заданного значения, процесс возвращается к шагу 703 (шаг 705). Если на шаге 705 установлено, что число n моментов выборки равно N, операционный блок 81 вычисляет среднее значение входного напряжения V0 без нагрузки на основании результатов N измерений (шаг 706). Собственно, во втором варианте осуществления изобретения предусматривается получение заданного числа выборок входного напряжения V0 без нагрузки, т.е. измерение этого показателя заданное число раз, и последующее вычисление среднего напряжения. Это позволяет эффективно исключить влияние колебаний напряжения или шума и т.д., таким образом повысив точность измерения. Кроме того, в качестве метода вычисления входного напряжения V0 без нагрузки может использоваться метод использования пикового напряжения (наибольшего значения). Может использоваться метод вычисления среднего значения на основании данных, из которых исключены наибольшее и наименьшее значения, или могут использоваться другие методы вычислений.
Далее операционный блок 81 определяет, является ли измеренное входное напряжение V0 без нагрузки  или равным 225 вольт (шаг 707). При определении того, что входное напряжение V0 без нагрузки больше или равно 225 вольт, операционный блок 81 первоначально устанавливает коэффициент заполнения D0 на 86%, используя значения, хранящиеся в таблице на фиг. 5А (шаг 708). При определении того, что входное напряжение V0 без нагрузки составляет менее 225 вольт, операционный блок 81 первоначально устанавливает коэффициент заполнения D0 на 88% (шаг 709). Дальнейшие действия аналогичны группе 610 шагов (шаги 611-620), показанной на фиг. 6, и поэтому описание этих действий не повторяется. Во втором варианте осуществления изобретения входное напряжение V0 без нагрузки измеряется сразу после нажатия клавиши пускового выключателя и до пуска двигателя, что обеспечивает точность измерения напряжения. Кроме того, изобретение обеспечивает возможность пуска двигателя 3 при подходящем коэффициенте заполнения, а также предотвращает подачу в двигатель 3 чрезмерного напряжения.
или равным 225 вольт (шаг 707). При определении того, что входное напряжение V0 без нагрузки больше или равно 225 вольт, операционный блок 81 первоначально устанавливает коэффициент заполнения D0 на 86%, используя значения, хранящиеся в таблице на фиг. 5А (шаг 708). При определении того, что входное напряжение V0 без нагрузки составляет менее 225 вольт, операционный блок 81 первоначально устанавливает коэффициент заполнения D0 на 88% (шаг 709). Дальнейшие действия аналогичны группе 610 шагов (шаги 611-620), показанной на фиг. 6, и поэтому описание этих действий не повторяется. Во втором варианте осуществления изобретения входное напряжение V0 без нагрузки измеряется сразу после нажатия клавиши пускового выключателя и до пуска двигателя, что обеспечивает точность измерения напряжения. Кроме того, изобретение обеспечивает возможность пуска двигателя 3 при подходящем коэффициенте заполнения, а также предотвращает подачу в двигатель 3 чрезмерного напряжения.
Третий вариант осуществления изобретения
Далее описывается способ управления вращением двигателя в третьем варианте осуществления настоящего изобретения, поясняемом блок-схемой на фиг. 8. В третьем варианте осуществления изобретения группа 700 шагов, относящаяся к процессу управления до пуска двигателя, выполняется в основном аналогично таковой во втором варианте. Однако, в отличие от второго варианта, в третьем варианте на шаге 701' выполняется операция присвоения полному сопротивлению Z значения Z0=0,118 Ом для вычисления падения напряжения на удлинительном шнуре. Это значение может быть предварительно сохранено в ПЗУ 84b операционного блока 81. Другие шаги группы 700 аналогичны шагам 702-706, предусмотренным во втором варианте осуществления изобретения, и поэтому их описание не повторяется. После того как при выполнении группы 700 шагов найдено среднее значение входного напряжения V0 без нагрузки, вычисленное по N выборкам после нажатия клавиши пускового выключателя, коэффициент заполнения D0 (%) вычисляется (шаг 801) по следующей формуле:

(При этом если вычисленное значение коэффициента заполнения D0 превышает 100, то D0=100.)
Такое вычисление коэффициента заполнения с помощью приведенного уравнения позволяет точно реагировать на колебания напряжения. Соответственно, по сравнению с первым и вторым вариантами осуществления изобретения, пуск двигателя 3 может осуществляться при оптимальном коэффициенте заполнения D0.
Далее, при нажатии оператором клавиши 26 пускового выключателя начинается вращение двигателя 3 (шаг 811). Затем, после того как двигатель 3 запустился, операционный блок 81 на основании выходного сигнала схемы 87 определения напряжения определяет в это время напряжение V1 под нагрузкой. Однако для определения напряжения в нужный момент, по истечении заданного времени Т2 после пуска двигателя, операционный блок 81 до истечения этого заданного времени Т2 находится в состоянии готовности (шаг 812). Например, заданное время Т2 может быть около 10 мс. По истечении заданного времени Т2 после пуска двигателя 3 операционный блок 81 в этот момент на основании выходного сигнала схемы 87 определения напряжения определяет напряжение V1 под нагрузкой и одновременно на основании выходного сигнала схемы 86 определения тока определяет ток Iin (шаг 813). Затем операционный блок 81 вычисляет (шаг 814) ожидаемое напряжение V2, приложенное к электроинструменту по следующей формуле:

Затем операционный блок 81 с использованием вычисленного V2 вычисляет (шаг 815) коэффициент заполнения D1 по следующей формуле:

Операционный блок 81 переключает коэффициент заполнения на полученный в результате вычисления коэффициент заполнения D1 для непрерывного управления вращением двигателя (шаг 816). Если пусковой выключатель 27 еще включен (шаг 817), операционный блок 81 возвращает процесс к шагу 813. Если пусковой выключатель 27 выключен, операционный блок 81 останавливает двигатель (шаг 818) и возвращает процесс к шагу 701'.
В третьем варианте осуществления изобретения входное напряжение V0 без нагрузки измеряется сразу после нажатия клавиши пускового выключателя и до пуска двигателя, что обеспечивает точность измерения напряжения. Соответственно, пуск двигателя 3 осуществляется при подходящем коэффициенте заполнения. Кроме того, сразу после пуска двигателя 3 вычисляется ожидаемое напряжение V2, приложенное к электроинструменту, рассчитываемое с учетом ситуации, в которой применение шнура питания обусловливает падение напряжения. Тогда на основе ожидаемого напряжения V2, приложенного к электроинструменту, задается оптимальный коэффициент заполнения D1. Двигатель 3 управляется оптимальным образом и работает при постоянной выходной мощности даже в неблагоприятных условиях с большим падением напряжения.
На шаге 815 может выполняться пропорционально-интегрально-дифференцирующее (ПИД) регулирование с использованием передаточной функции G. В этом случае пропорциональный коэффициент усиления Кр равен V2/V1, а передаточная функция G вычисляется по следующей формуле:

где Tis, с - время интегрирования, Tds, с - время дифференцирования.
При этом время интегрирования и время дифференцирования являются параметрами и задаются в соответствии с фактическим режимом работы двигателя. Затем вычисляется D1 по формуле D1=G×D0 и выполняется управление двигателем.
Четвертый вариант осуществления изобретения
Далее описывается способ управления вращением двигателя в четвертом варианте осуществления настоящего изобретения, поясняемом блок-схемой на фиг. 9. В четвертом варианте осуществления изобретения шаги управления после пуска двигателя 3 (группа 810 шагов) аналогичны таковым в третьем варианте. Однако до пуска двигателя 3 процесс управления в четвертом варианте отличается от третьего варианта. Сначала к розетке 105 или к катушке 103 удлинительного шнура подсоединяют шнур питания 9 ударного гайковерта 1, что приводит к запуску микрокомпьютера, входящего в состав операционного блока 81. Далее выполняется первоначальная установка значений начального коэффициента заполнения D0 и коэффициента заполнения под нагрузкой D1 на 86%. Одновременно полному сопротивлению Z присваивается (шаг 901) значение Z0=0,118 Ом для вычисления падения напряжения на удлинительном шнуре. Начальные значения этих параметров могут быть предварительно сохранены в ПЗУ 84b операционного блока 81. Затем для измерения входного напряжения V0 без нагрузки в нужный момент, по истечении заданного времени Т1 после запуска микрокомпьютера, операционный блок 81 до истечения этого заданного времени Т1 находится в состоянии готовности (шаг 902). Затем, по истечении заданного времени Т1, операционный блок 81 на основании выходного сигнала схемы 87 определения напряжения определяет в это время входное напряжение V0 без нагрузки (шаг 903). Затем операционный блок 81 вычисляет (шаг 904) устанавливаемый первоначально коэффициент заполнения D0 по следующей формуле:

После завершения вычисления операционный блок 81 определяет, включен ли пусковой выключатель 27. Если установлено, что пусковой выключатель 27 включен, процесс переходит к группе 810 шагов. Если установлено, что пусковой выключатель 27 все еще выключен, процесс возвращается к шагу 903. Действия, предусмотренные в процессе управления группой 810 шагов, аналогичны таковым в третьем варианте осуществления изобретения, показанном на фиг. 8, и поэтому их описание не повторяется.
В четвертом варианте осуществления изобретения процесс измерения входного напряжения V0 без нагрузки упрощен по сравнению с третьим вариантом. Кроме того, обеспечивается точное регулирование коэффициента заполнения D1 при управлении вращением двигателя 3 после его пуска. Соответственно, электроинструмент, такой как ударный гайковерт, может стабильно эксплуатироваться даже в условиях нестабильного напряжения питания и больших колебаний напряжения.
Настоящее изобретение описано выше на иллюстративных примерах его осуществления. Однако рассмотренные примеры не ограничивают возможностей осуществления изобретения и могут быть различным образом видоизменены без отхода от сущности изобретения. Например, в приведенных примерах осуществления изобретения рассматривался электроинструмент, получающий энергию через шнур питания извне от источника переменного тока промышленной сети. Вместе с тем, настоящее изобретение может аналогично использоваться в электроинструменте, питающемся постоянным током, подаваемым извне или от аккумуляторной батареи. Кроме того, в качестве примера электроинструмента выше рассмотрен ударный гайковерт. Однако возможности осуществления настоящего изобретения не ограничиваются ударным гайковертом - изобретение может использоваться аналогично в приложении к ударному шуруповерту, дрели-шуруповерту, электрической циркулярной пиле, ударной дрели либо перфоратору или к любому другому электроинструменту, в котором в качестве источника энергии используется двигатель.
В отношении настоящего изобретения испрашивается конвенционный приоритет по дате подачи японской заявки №2014-070587, которая была подана 28 марта 2014 г. и все содержание которой включено в данное описание путем ссылки.
Промышленная применимость
Согласно одному из аспектов изобретения предложен электроинструмент, способный сохранять номинальную мощность даже при определенной степени непостоянства подаваемого в электроинструмент напряжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОИНСТРУМЕНТ | 2012 |
|
RU2584606C2 |
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2010 |
|
RU2532790C2 |
| ПРИВОДНОЙ ИНСТРУМЕНТ С БАТАРЕЙНЫМ ПИТАНИЕМ, ИМЕЮЩИЙ СХЕМУ ЗАЩИТЫ ОТ СВЕРХТОКОВ, И БАТАРЕЙНЫЙ ИСТОЧНИК ПИТАНИЯ ДЛЯ ЭТОГО ИНСТРУМЕНТА | 2006 |
|
RU2374735C2 |
| ИМПУЛЬСНО-СИЛОВАЯ РУЧНАЯ МАШИНА | 2010 |
|
RU2534322C2 |
| СИСТЕМА УПРАВЛЕНИЯ СВАРОЧНЫМ ПРОЦЕССОМ | 1990 |
|
RU2126737C1 |
| ИНСТРУМЕНТ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ, УПРАВЛЯЮЩЕЕ УСТРОЙСТВО И НОСИТЕЛЬ ИНФОРМАЦИИ | 2008 |
|
RU2484945C2 |
| ИСТОЧНИК ПОСТОЯННОГО ТОКА С ФУНКЦИЕЙ ЗАРЯДКИ АККУМУЛЯТОРНЫХ БАТАРЕЙ | 2004 |
|
RU2277279C2 |
| Маломощный электропривод | 1990 |
|
SU1767682A1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ ТРАНСПОРТНОЙ МАШИНЫ | 2015 |
|
RU2596807C1 |
| Электропривод постоянного тока | 1984 |
|
SU1239820A1 |





Изобретение относится к электроинструменту. Электроинструмент содержит двигатель, управляемый при помощи широтно-импульсной модуляции посредством полупроводникового ключевого элемента с использованием энергии от источника питания, передаточный механизм, выполненный с возможностью передачи вращения двигателя на рабочий инструмент, и контроллер. Контролер обеспечивает управление вращением двигателя посредством коэффициента заполнения сигнала широтно-импульсной модуляции. В случае если между шнуром питания и внешним источником питания включен удлинительный шнур и энергия от внешнего источника питания подается через шнур питания и удлинительный шнур, контроллер обеспечивает, по прошествии заданного времени после пуска двигателя, управление двигателем с установкой коэффициента заполнения на значение, превышающее значение, устанавливаемое в случае подачи энергии от внешнего источника питания только через шнур питания. В результате предотвращается уменьшение вращающегося момента двигателя при колебаниях напряжения. 11 з.п. ф-лы, 10 ил.
1. Электроинструмент, содержащий:
- корпус;
- выходящий из корпуса шнур питания, подключаемый к внешнему источнику питания;
- двигатель, управляемый при помощи широтно-импульсной модуляции (ШИМ) посредством полупроводникового ключевого элемента с использованием энергии, подаваемой от внешнего источника питания через шнур питания;
- передаточный механизм, выполненный с возможностью передачи вращения двигателя на рабочий инструмент для приведения рабочего инструмента в движение; и
- контроллер, обеспечивающий управление вращением двигателя посредством коэффициента заполнения сигнала широтно-импульсной модуляции (ШИМ-сигнала),
причем в случае если между шнуром питания и внешним источником питания включен удлинительный шнур и энергия от внешнего источника питания подается через шнур питания и удлинительный шнур, контроллер обеспечивает, по прошествии заданного времени после пуска двигателя, управление двигателем с установкой коэффициента заполнения на значение, превышающее значение, устанавливаемое в случае подачи энергии от внешнего источника питания только через шнур питания.
2. Электроинструмент по п. 1, в котором контроллер выполнен с возможностью:
- установки коэффициента заполнения на опорное значение, меньшее 100%, если приложенное к электроинструменту напряжение питания находится в заданном диапазоне, включающем номинальное напряжение электроинструмента, и
- управления двигателем с установкой коэффициента заполнения на значение выше опорного, если напряжение питания, приложенное к электроинструменту после пуска двигателя, стало ниже заданного диапазона,
включающего номинальное напряжение, на величину падения напряжения, обусловленного прохождением тока через шнур питания.
3. Электроинструмент по п. 1 или 2, в котором:
- источником питания является источник переменного тока, подаваемого извне через шнур питания,
- в корпусе электроинструмента имеется выпрямительная схема, обеспечивающая выпрямление подаваемого переменного тока, и
- в качестве двигателя используется бесщеточный двигатель, управляемый посредством инверторной схемы.
4. Электроинструмент по п. 1 или 2, в котором:
- опорное значение коэффициента заполнения составляет менее 90%, и
- если приложенное к электроинструменту напряжение питания ниже номинального напряжения, контроллер управляет двигателем с увеличением коэффициента заполнения, причем верхний предел увеличенного коэффициента заполнения равен 100%.
5. Электроинструмент по п. 4, также содержащий клавишу пускового выключателя для приведения двигателя во вращение, причем контроллер устанавливает коэффициент заполнения на значение выше опорного, если имеется потенциальная разность между первым напряжением питания, прикладываемым к электроинструменту сразу после нажатия клавиши пускового выключателя, и вторым напряжением питания, прикладываемым к электроинструменту после пуска двигателя.
6. Электроинструмент по п. 5, в котором контроллер определяет коэффициент заполнения на основании второго напряжения в течение заданного времени сразу после нажатия клавиши пускового выключателя.
7. Электроинструмент по п. 6, в котором контроллер управляет двигателем с увеличением коэффициента заполнения, если во время вращения двигателя второе напряжение уменьшилось.
8. Электроинструмент по п. 6, в котором контроллер управляет двигателем в режиме, в котором коэффициент заполнения, определенный с использованием второго напряжения сразу после нажатия клавиши пускового выключателя, зафиксирован до возврата клавиши пускового выключателя в исходное положение.
9. Электроинструмент по п. 1 или 2, дополнительно содержащий задатчик частоты вращения, выполненный с возможностью установки нескольких уровней максимальной частоты вращения двигателя, причем коэффициент заполнения устанавливается на несколько ступеней в диапазоне от нуля до опорного значения пропорционально устанавливаемым уровням частоты вращения.
10. Электроинструмент по п. 1, в котором:
- сразу после нажатия клавиши пускового выключателя для приведения двигателя во вращение контроллер обеспечивает установку коэффициента заполнения на значение, меньшее 100%, и
- если напряжение питания, приложенное к электроинструменту после пуска двигателя, стало ниже номинального напряжения электроинструмента на величину падения напряжения, обусловленного прохождением тока через шнур питания, контроллер обеспечивает увеличение коэффициента заполнения.
11. Электроинструмент по п. 1, в котором контроллер выполнен с возможностью:
- установки коэффициента заполнения до пуска двигателя на значение, меньшее 100%, и
- управления двигателем при коэффициенте заполнения, более высоком, чем ранее установленный коэффициент заполнения, если напряжение питания, приложенное к электроинструменту после пуска двигателя, стало ниже напряжения питания до пуска двигателя на величину падения напряжения, обусловленного прохождением тока через шнур питания.
12. Электроинструмент по п. 11, в котором состоянием двигателя до пуска является состояние двигателя до прохождения тока через него, а состоянием двигателя после пуска является состояние прохождения тока через двигатель.
| WO 2013137480 A2, 19.09.2013 | |||
| Устройство для регулирования скорости вращения тягового электродвигателя | 1981 |
|
SU985918A1 |
| WO 2012127851 A2, 27.09.2012. | |||

