СИСТЕМА ОПРЕДЕЛЕНИЯ КИНЕТИЧЕСКИХ ПАРАМЕТРОВ ШИНЫ
Область техники
Настоящее изобретение относится к системе определения кинетических параметров для пневматических шин, в частности, таких, чья работа зависит от качения шины и деформации шины, без фактического контакта.
Уровень техники
С 1979 года в США выдано более 60 патентов, относящихся к деформации шины или пятну контакта шины, и только некоторые из них сходны с настоящим изобретением. Например, патент США №4180794 обеспечивает определение степени деформации шины по количеству света, отражающегося от ее внутренней поверхности, а патент США №6612164 обеспечивает определение продольных и поперечных изменений положения измерительной точки на внутренней поверхности шины по отраженному излучению измерительной точки.
Другой патент США №6967590 обеспечивает измерение деформации шины посредством оптического изображения отражающего элемента, расположенного на ее внутренней поверхности, а еще один немецкий патент №3916176 обеспечивает измерение расстояния между ободом колеса и внутренней поверхностью шины посредством триангуляции. Все вышеперечисленные патенты используют отражение света от внутренней поверхности шины, и ни один из них не учитывает боковой наклон, являющийся значительной частью полной картины.
Точное, полное, но при этом простое определение кинетических параметров шины несомненно является главной целью уровня техники, однако, похоже, что существует задача, которая еще не решена полностью, и, таким образом, настоящее изобретение является попыткой удовлетворить существующую потребность.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является создание системы определения кинетических параметров для пневматических шин. При проецировании определяющей волны перпендикулярно на точку внутренней поверхности шины возникают быстрые и значительные изменения угла падения и угла отклонения каждый раз, когда точка перемещается через пятно контакта шины, вследствие деформации шины. Посредством анализирования сигнала, обратно пропорционального сумме двух углов, получают характеристики пятна контакта шины с двумя конкретными моментами и циклическим периодом качения шины. Кроме того, на основании трех конкретных моментов выявляют продольный кинетический параметр, являющийся одним из следующих параметров: сила трения, смещение и деформация.
Для достижения вышеупомянутых и других целей предложена система определения кинетических параметров шины, включающая: по меньшей мере один источник излучения волн, выполненный с возможностью вращения вместе с шиной и излучения по меньшей мере одной определяющей волны в направлении внутренней поверхности указанной шины; по меньшей мере один датчик волн, выполненный с возможностью вращения вместе с указанным по меньшей мере одним источником излучения волн и вывода сигнала измерения в соответствии с физическим параметром по меньшей мере одной указанной определяющей волны, отраженной от указанной внутренней поверхности; и обрабатывающий модуль, выполненный с возможностью приема указанного сигнала измерения, регистрации по меньшей мере двух моментов времени, в течение которого по меньшей мере одна указанная определяющая волна проходит через указанное пятно контакта указанной шины, и вычисления кинетического параметра указанной шины по меньшей мере с двумя указанными моментами времени.
Далее приведено подробное описание изобретения с поясняющими предпочтительными вариантами осуществления изобретения и иллюстративными чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
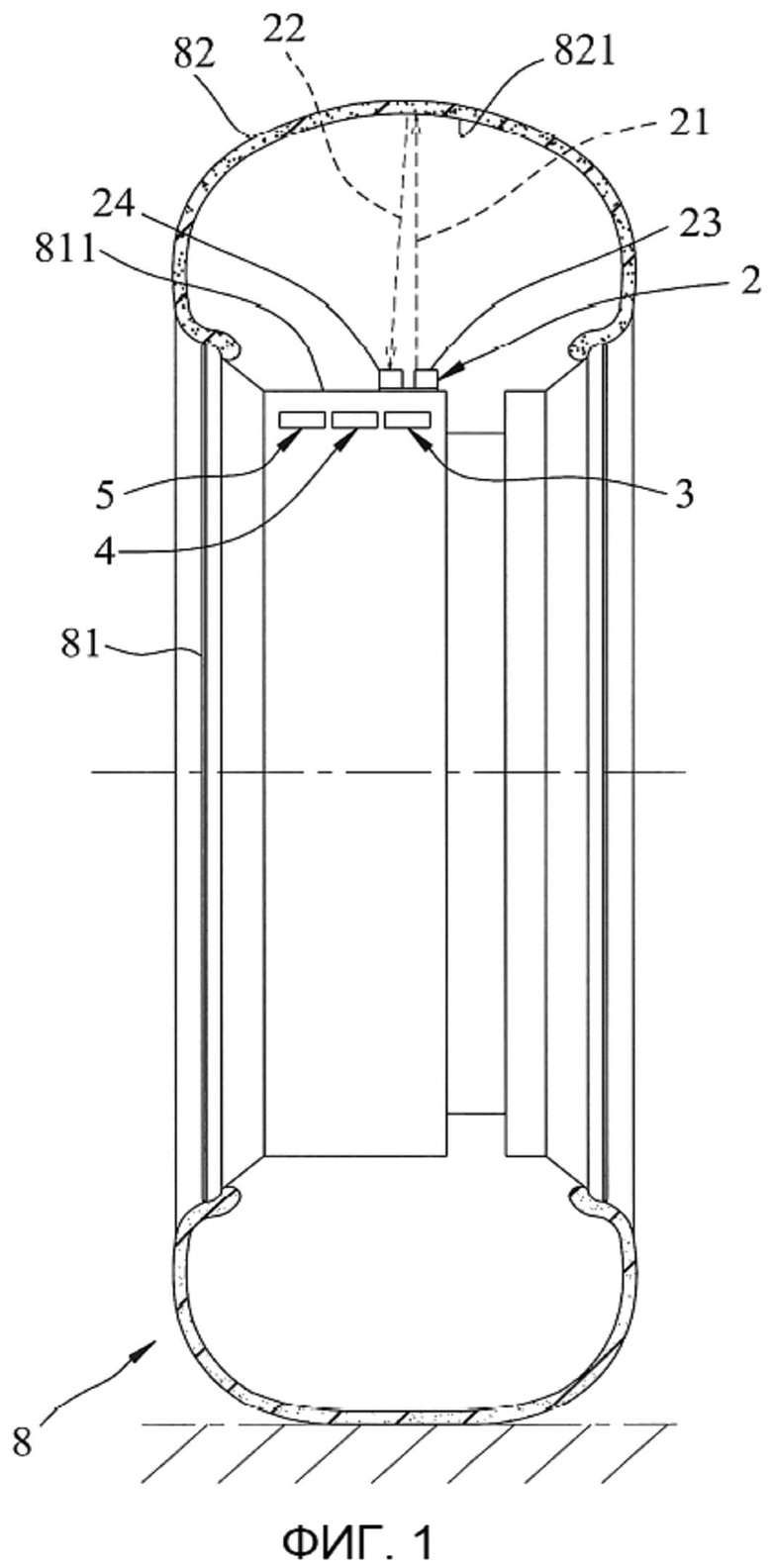
Фиг. 1 показывает предпочтительный вариант осуществления настоящего изобретения;
Фиг. 2 показывает блок-схему указанного предпочтительного варианта осуществления изобретения;
Фиг. 3 показывает типичный пример излучателя света указанного предпочтительного варианта осуществления изобретения;
Фиг. 4 показывает типичный пример приемника света указанного предпочтительного варианта осуществления изобретения;
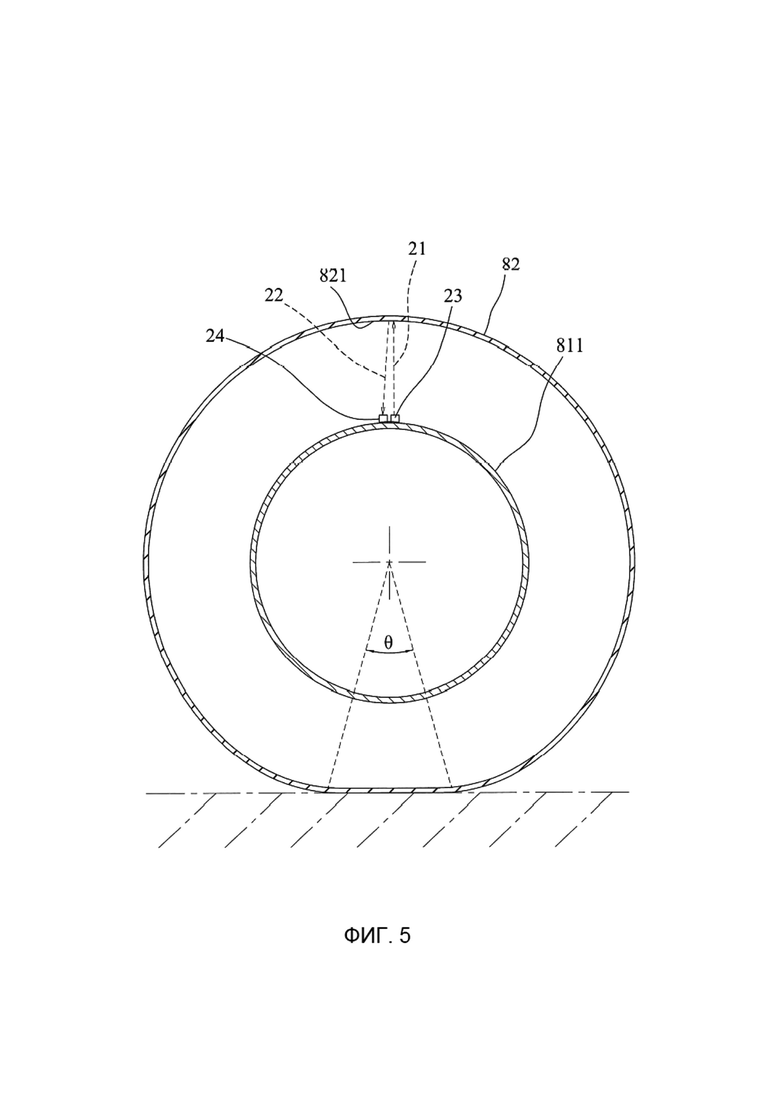
Фиг. 5 показывает указанный предпочтительный вариант осуществления изобретения в разрезе, работающий в недеформированной области;
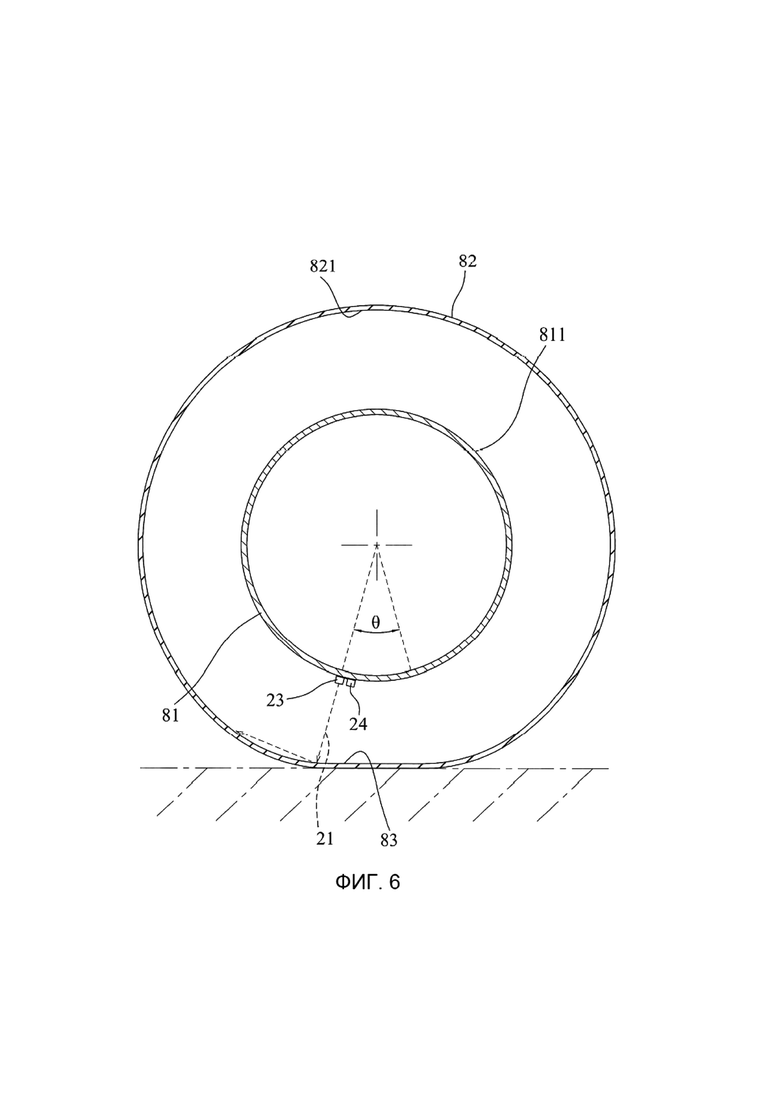
Фиг. 6 показывает указанный предпочтительный вариант осуществления изобретения в разрезе, работающий на одном краю деформированной области;
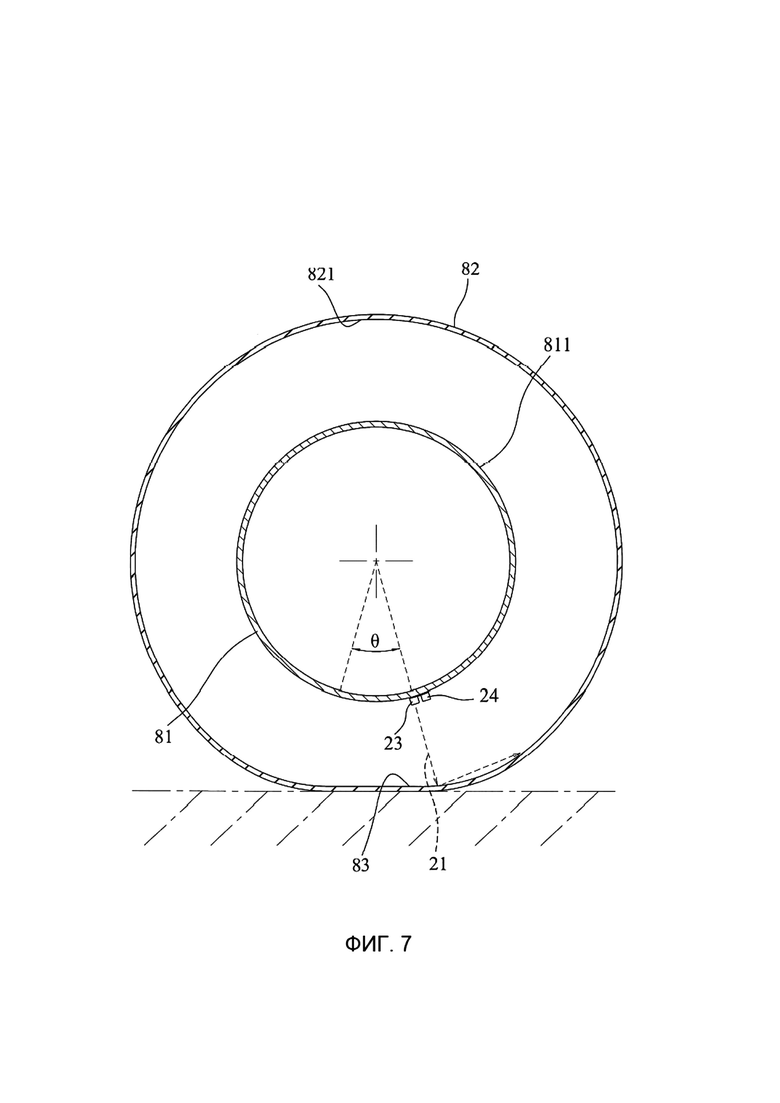
Фиг. 7 показывает указанный предпочтительный вариант осуществления изобретения в разрезе, работающий на другом краю деформированной области;
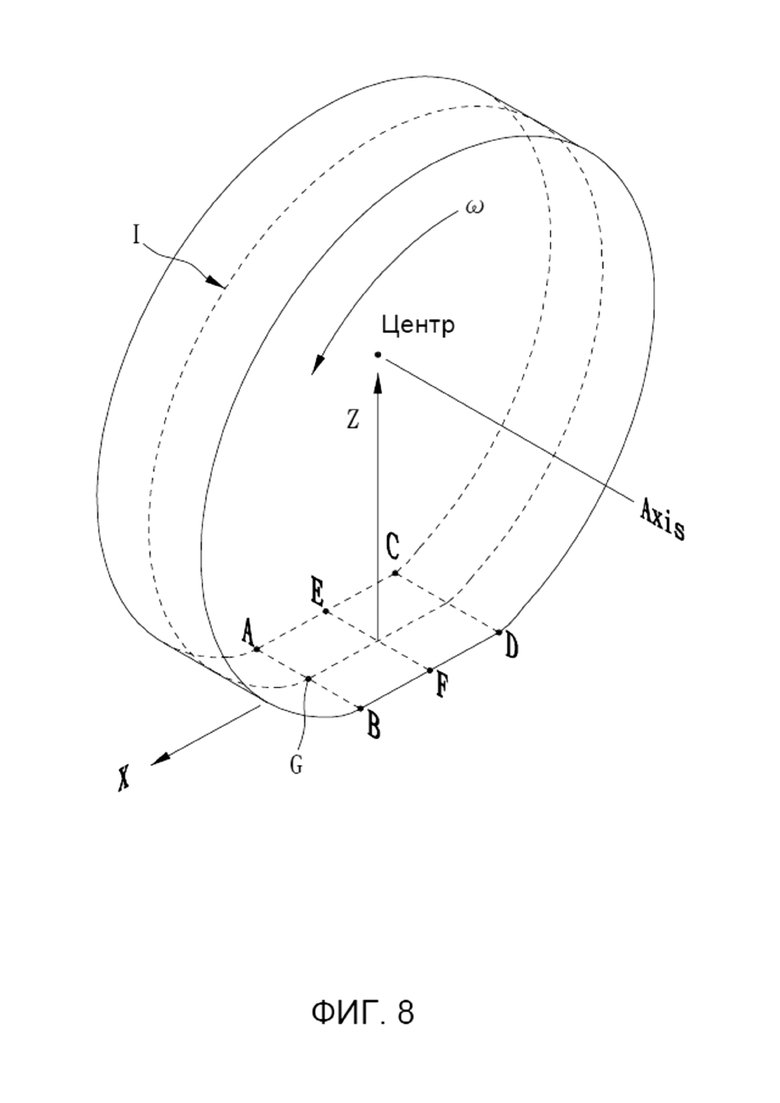
Фиг. 8 и 9 показывает виды пятна контакта шины в разрезе;
Фиг. 10 и 11 показывает типичные графики измерений указанного предпочтительного варианта осуществления изобретения;
Фиг. 12 и 14 показывает виды в разрезе двух альтернативных вариантов осуществления настоящего изобретения; и
Фиг. 13 показывает осевой разрез шины, имеющей ненулевой боковой наклон.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение представляет собой систему определения кинетических параметров шины и содержит по меньшей мере один источник излучения волн, по меньшей мере один датчик волн и обрабатывающий модуль. Указанная шина имеет два значения в настоящем описании: это может быть либо пневматическая шина сама по себе, либо пневматическое колесо в сборе, содержащее пневматическую шину и обод колеса.
Указанный по меньшей мере один источник излучения волн выполнен с возможностью вращения вместе с указанной шиной и излучения по меньшей мере одной определяющей волны (направленной) в направлении внутренней поверхности указанной шины. По меньшей мере один указанный датчик волн выполнен с возможностью вращения вместе с указанным по меньшей мере одним источником излучения волн и вывода сигнала измерения в соответствии с физическим параметром указанной по меньшей мере одной определяющей волны, отраженной от указанной внутренней поверхности. Указанный обрабатывающий модуль выполнен с возможностью приема указанного сигнала измерения, регистрации по меньшей мере двух моментов времени, в течение которого по меньшей мере одна указанная определяющая волна проходит через указанное пятно контакта указанной шины, и вычисления кинетического параметра указанной шины с указанными по меньшей мере двумя моментами. Указанный кинетический параметр включает в себя циклический период качения шины. Кроме того, указанные по меньшей мере два момента в совокупности с указанным циклическим периодом качения шины вызывают пять дополнительных кинетических параметров указанной шины, которыми являются деформация, воспринимаемая нагрузка, площадь пятна контакта, угловая скорость и боковой наклон.
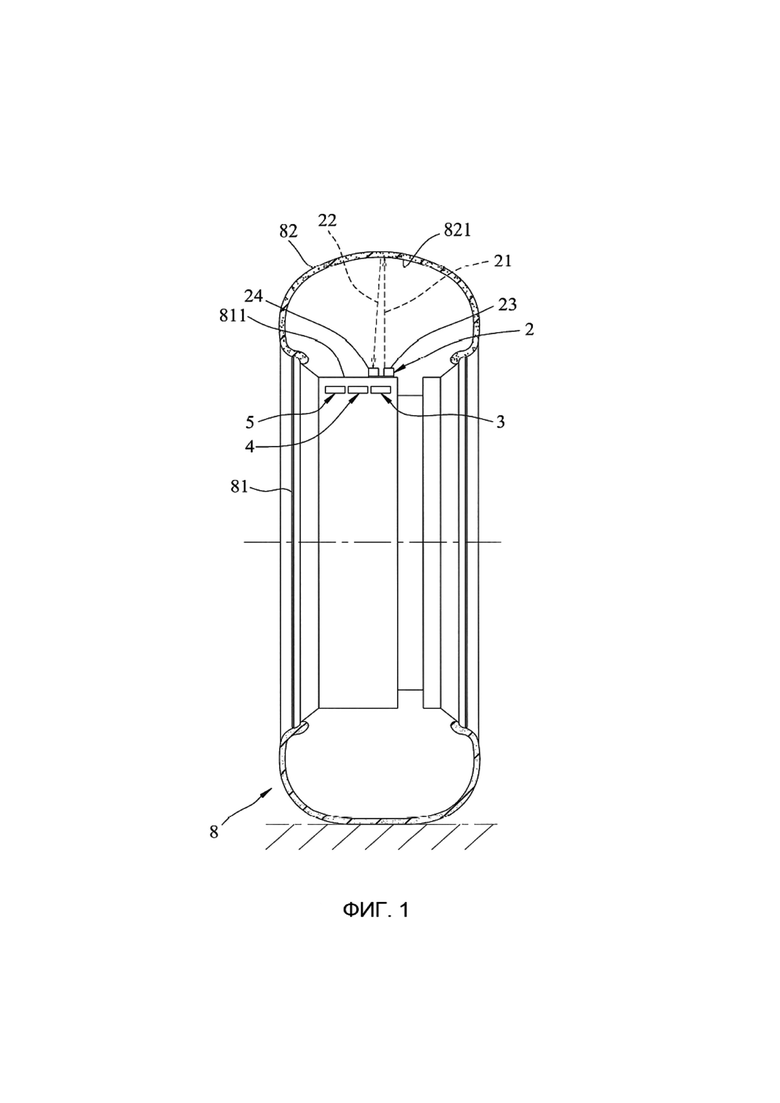
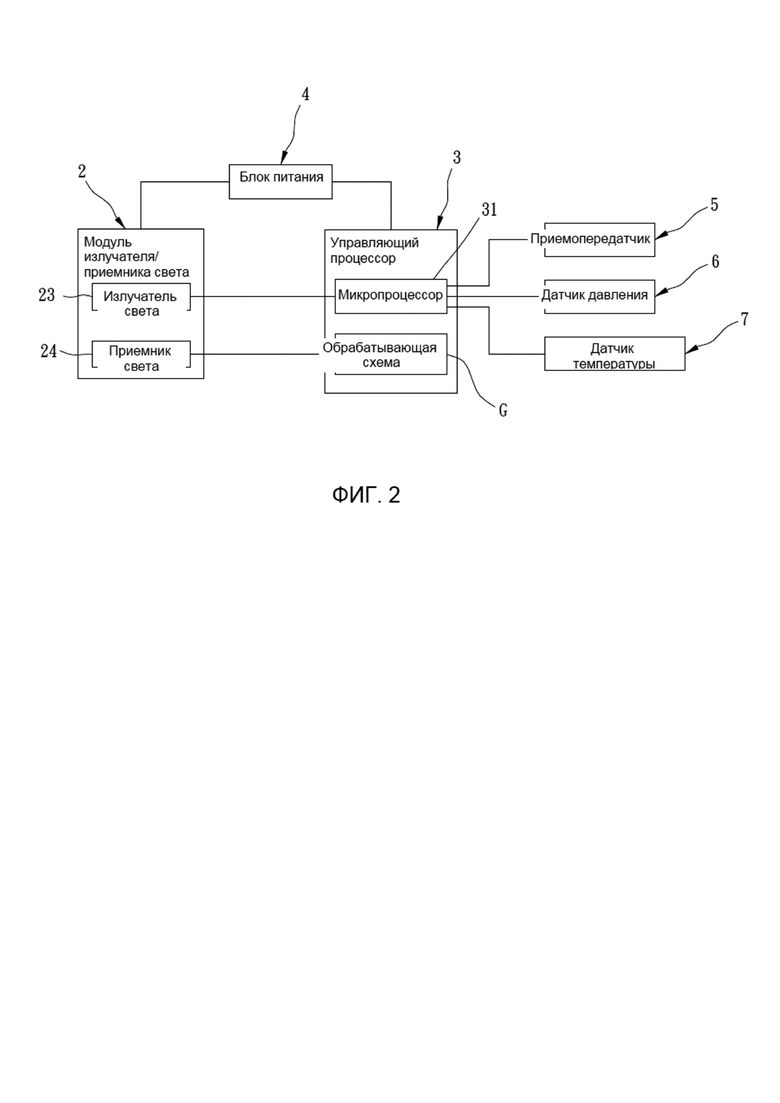
На фиг. 1-7 представлен предпочтительный вариант осуществления настоящего изобретения. Пневматическое колесо 8 имеет обод 81 колеса и пневматическую шину 82, устанавливаемую на указанный обод 81 колеса и находящуюся в контакте с землей. Обод 81 колеса имеет наружную поверхность 811 обода, а пневматическая шина 82 имеет внутреннюю поверхность 821. Указанный предпочтительный вариант осуществления изобретения содержит модуль 2 излучателя/приемника света, управляющий процессор 3, блок 4 питания, приемопередатчик 5, датчик 6 давления и датчик 7 температуры.
В указанном предпочтительном варианте осуществления изобретения указанный по меньшей мере один источник излучения волн и указанный по меньшей мере один датчик волн представлены модулем 2 излучателя/приемника света, а указанный обрабатывающий модуль представлен управляющим процессором 3. Указанный по меньшей мере один источник излучения может излучать либо электромагнитную, либо звуковую волну любой частоты, указанный обрабатывающий модуль может находиться либо внутри, либо снаружи воздушной камеры пневматического колеса 8 и функционально соединен с указанным по меньшей мере одним датчиком волн проводным или беспроводным способом.
Модуль 2 излучателя/приемника света соединен с ободом 81 колеса, испускает световой луч 21 в направлении пневматической шины 82 и принимает отраженный свет 22, возвращающийся в обратном направлении от внутренней поверхности 821, а также выводит сигнал обнаружения света в соответствии с отраженным светом 22. В указанном предпочтительном варианте осуществления изобретения указанная по меньшей мере одна определяющая волна представлена световым лучом 21, а указанный сигнал измерения представлен указанным сигналом обнаружения света. Последний здесь принимается соответствующим световому потоку отраженного света 22, но не ограничивается им, в других вариантах осуществления изобретения сигнал может представлять любой параметр электромагнитной или звуковой волны, связанный с энергией/интенсивностью/объемом.
Модуль 2 излучателя/приемника света содержит излучатель 23 света для излучения светового луча 21 и приемник 24 света для подачи указанного сигнала обнаружения света при получении отраженного света 22. В указанном предпочтительном варианте осуществления изобретения указанный по меньшей мере один источник излучения волн представлен излучателем 23 света, а указанный по меньшей мере один датчик волн представлен приемником 24 света.
Как показано на фиг. 1, 2 и 5, управляющий процессор 3 соединен с ободом 81 колеса и электрически подключен к излучателю 23 света и приемнику 24 света и осуществляет вычисление центрального угла 0 пятна контакта шины на основании указанного сигнала обнаружения света. Центральный угол пятна контакта шины представляет собой центральный угол плоской части протектора шины, контактирующей с землей, пятно контакта шины проходит в пределах протектора шины от места наименьшей деформации протектора к месту наибольшей деформации протектора и до места наименьшей деформации протектора.
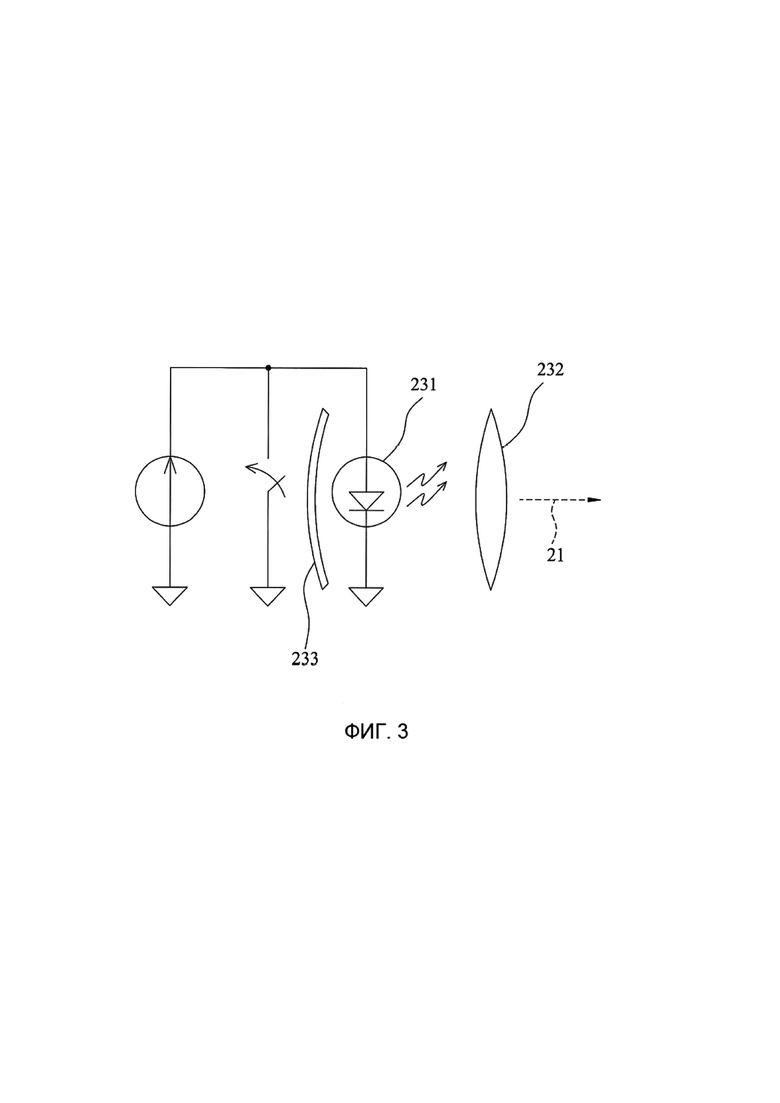
Как показано на фиг. 1, 3 и 4, излучатель 23 света имеет излучающий элемент 231 для излучения светового луча 21, линзу 232 и отражающую пластину 233. В указанном предпочтительном варианте осуществления изобретения линза 232 расположена между излучающим элементом 231 и пневматической шиной 82, а отражающая пластина 233 расположена между излучающим элементом 231 и ободом 81 колеса.
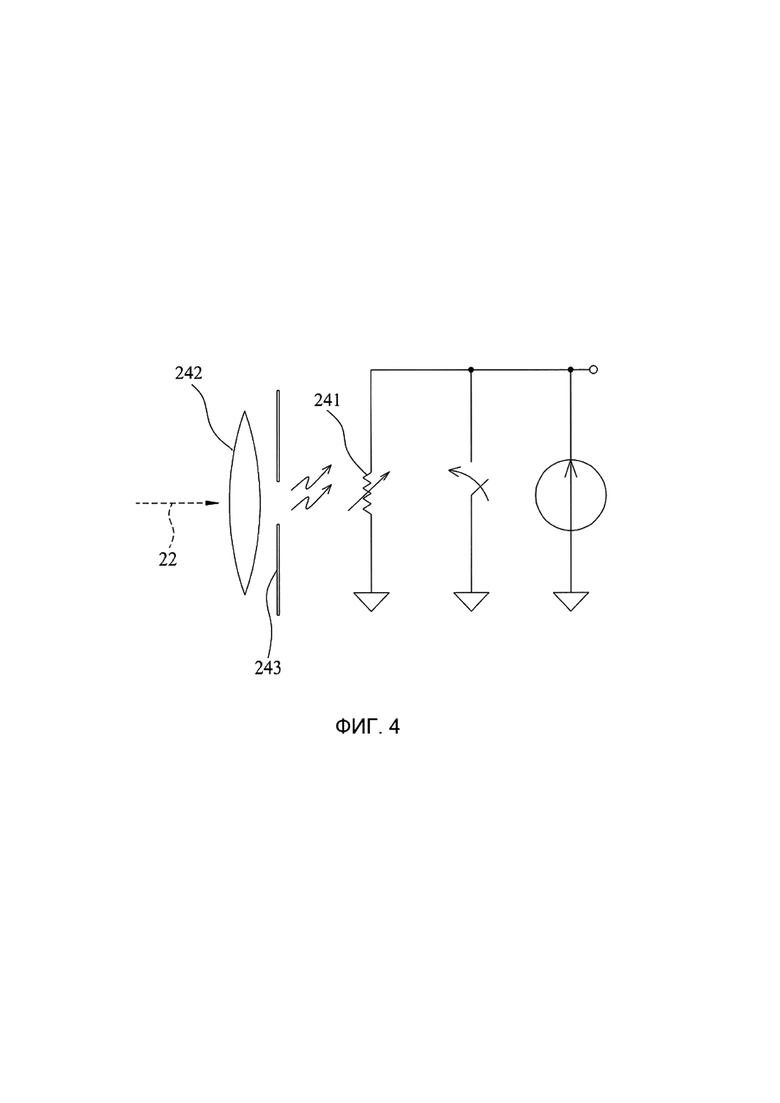
Приемник 24 света имеет оптико-электрический преобразователь 241 для приема отраженного света 22 и вывода указанного сигнала обнаружения света, линзу 242 и оптическую решетку 243. В указанном предпочтительном варианте осуществления изобретения линза 242 и оптическая решетка 243 расположены между оптико-электрическим преобразователем 241 и пневматической шиной 82.
Управляющий процессор 3 содержит микропроцессор 31, электрически соединенный с излучателем 23 света, и обрабатывающую схему 32, электрически соединенную как с микропроцессором 31, так и с приемником 24 света.
Блок питания 4 электрически соединен с модулем 2 излучателя/приемника света и управляющим процессором 3.
Приемопередатчик 5 электрически соединен с управляющим процессором 3. В указанном предпочтительном варианте осуществления изобретения приемопередатчик 5 отправляет и получает сигналы по беспроводной связи.
Датчик 6 давления измеряет давление воздуха в пневматической шине 82.
Датчик 7 температуры измеряет температуру воздуха в пневматической шине 82.
Как показано на фиг. 2, 3 и 5, для запуска указанного предпочтительно варианта осуществления изобретения пневматическое колесо 8 приводят в движения для качения вперед. Управляющий процессор 3 активирует излучатель 23 света для проецирования светового луча 21 на внутреннюю поверхность 821, причем световой луч 21 фокусируют линзой 232 для сужения площади его поперечного сечения.
Как показано на фиг. 5, 6 и 7, когда световой луч 21 проецируют на недеформированную область пневматической шины 82, световой поток отраженного света 22, принимаемый приемником 24 света, достигает своего максимального значения; а когда световой луч 21 проецируют на деформированную область, проходящую от передней кромки до задней кромки, приемник 24 света воспринимает увеличение, за которым следует такое же уменьшение принимаемого светового потока в данном интервале.
Как показано на фиг. 2 и 4, оптико-электрический преобразователь 241 принимает отраженный свет 22 с целью формирования указанного сигнала обнаружения света для отправки его к обрабатывающей схеме 32, где может быть проведена предварительная обработка, дополнительное преобразование и аналитические расчеты сигнала обнаружения света.
Таким образом, при прохождении светового луча 21 через переднюю кромку пятна контакта шины указанный сигнал обнаружения света претерпевает быстрое ослабление; а при прохождении светового сигнала 21 через заднюю кромку пятна контакта шины указанный сигнал обнаружения света претерпевает быстрое усиление.
Следовательно, соответствующие сроки прохождения световым лучом 21 кромок пятна контакта могут быть идентифицированы и зарегистрированы обрабатывающей схемой 32 и микропроцессором 31.
Как показано на фиг. 2, 6 и 7, указанный сигнал обнаружения света значительно изменяется в течение более короткого интервала деформированной области и остается относительно спокойным в течение намного более длинного интервала недеформированной области, так что за один оборот шины микропроцессор 31 отличает временной интервал деформированной области от временного интервала недеформированной области, и таким образом определяют соответственно циклический период качения шины и центральный угол пятна контакта шины.
Если имеется таблица преобразования, составленная ранее по результатам лабораторных испытаний, то такие технические методы, как компенсация, интерполяция, калибровка и т.п. могут быть полезны для повышения точности. Управляющий процессор 3 может дополнительно передавать информацию о центральном угле пятна контакта шины вместе с информацией о давлении/температуре шины компьютеру транспортного средства (не показан) и/или представлять ее водителю.
У водителей нет шансов отреагировать без такой критически важной информации, поскольку, например, сочетание нормального давления в шине и большего центрального угла пятна контакта шины предполагает, что шина перегружена, а износ шины и потеря мощности резко увеличивается. С другой стороны, нормальное давление в шине в сочетании с меньшим центральным углом пятна контакта шины подает важный знак о недостаточной тормозной мощности, в связи с чем рекомендуется снизить давление в шине, особенно в дождливую погоду.
Кроме того, площадь пятна контакта шины легко рассчитывают на основании центрального угла пятна контакта шины и радиуса/ширины шины, а нагрузку на шину в свою очередь легко рассчитывают посредством умножения площади пятна контакта на давление в шине.
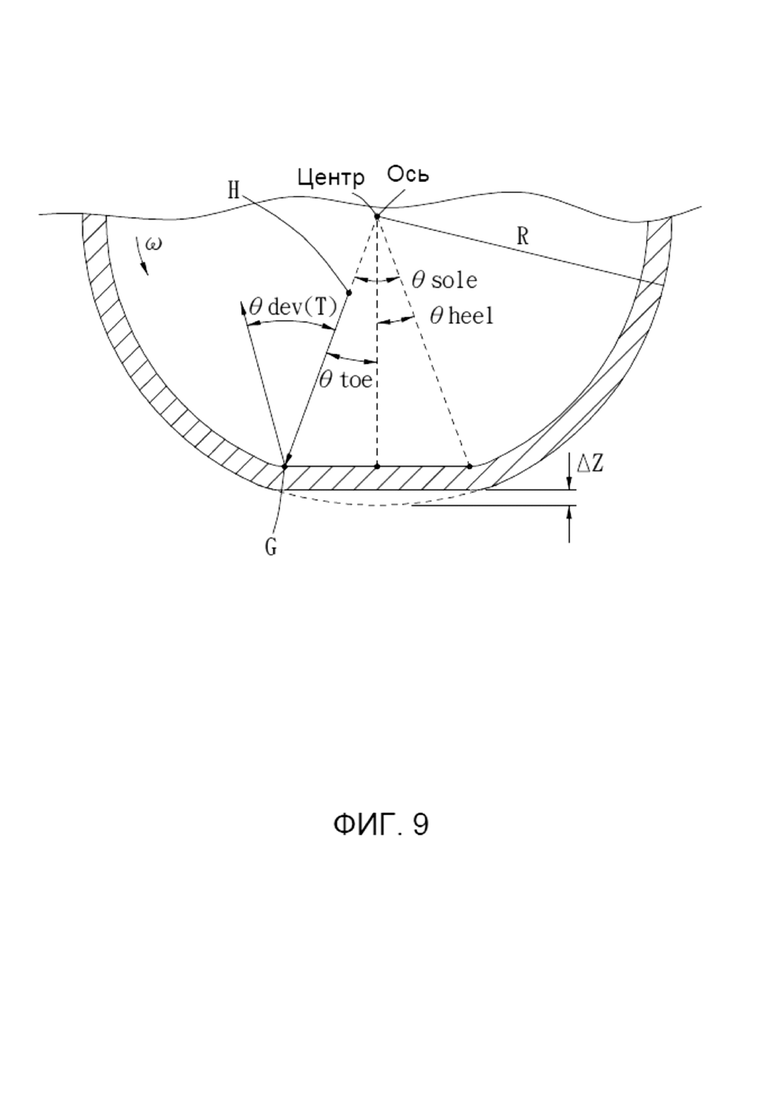
Далее со ссылками на фиг. 6-11 представлено более подробное описание настоящего изобретения. Предполагается, что нагруженная шина катится вперед по плоскости земли, а ее ось вращения параллельна этой плоскости. Как показано на фиг. 8 и 9, ниже приведены следующие определения элементов указанной нагруженной шины:
Пятно контакта - прямоугольная плоскость ABCD, имеющая площадь Abed;
Передняя кромка пятна контакта - линия АВ;
Задняя кромка пятна контакта - линия CD;
Ось вращения - Ось;
Перпендикулярно спроецированная линия Оси на плоскость ABCD - линия EF;
Продольное направление - X;
Нормальное направление плоскости ABCD - Z, деформация шины - ΔZ;
Центральная окружность внутренней поверхности шины - I;
Геометрический центр шины - Центр;
Ширина W - длина линии АВ, CD или EF;
Радиус шины - R;
G - точка отражения на I;
Н - реперная точка обода колеса на линии от Центра к G;
Угловая скорость N-го цикла - ω(N);
Циклический период качения N-го цикла - Period(N);
Стрелка HG в N-ный раз пересекает линию АВ в момент Ttoe(N);
Стрелка HG в N-ный раз пересекает линию EF в момент Tsole(N);
Стрелка HG в N-ный раз пересекает линию CD в момент Theel(N);
Центральный угол N-го цикла, образованный линией АВ и CD - Θsole(N);
Центральный угол N-го цикла, образованный линией АВ и EF - Θtoe(N);
Центральный угол N-го цикла, образованный линией CD и EF - Θheel(N);
Угол между стрелкой GH и направлением наиболее сильного отражения волны в точке G - Θdev(T).
Устанавливают по меньшей мере один источник излучения волн и по меньшей мере один датчик волн в точке Н, причем указанный по меньшей мере один источник излучения волн и указанный по меньшей мере один датчик волн расположены в непосредственной близости друг от друга. Указанный по меньшей мере один источник излучения волн излучает по меньшей мере одну определяющую волну, имеющую малую площадь поперечного сечения, в направлении точки G, а указанный по меньшей мере один датчик волн принимает обратную волну указанной по меньшей мере одной определяющей волны, отражаемой от G, и выводит сигнал измерения в соответствии с параметром указанной обратной волны, связанным с энергией/интенсивностью/объемом.
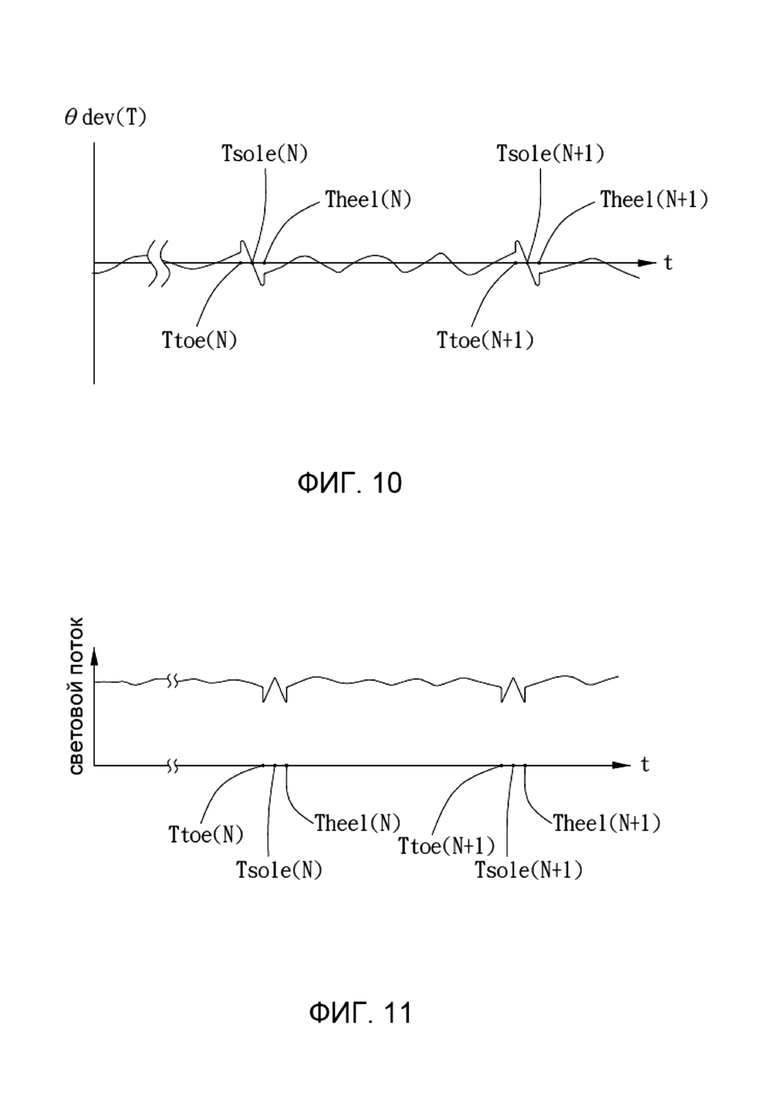
Точка G может быть либо точкой внутренней поверхности шины, либо отражающим элементом 83, прикрепленным к указанной внутренней поверхности. Предпочтительно, чтобы указанная внутренняя поверхность или отражающий элемент 83 имели однородную гладкую поверхность с тем, чтобы направление наиболее сильного или наиболее возможного отражения указанной по меньшей мере одной определяющей волны, отражаемой в точке G, оставалось неизменным, как если бы G была идеальным отражающим покрытием. Предполагается, что указанная внутренняя поверхность симметрична относительно I, типичный пример Θdev(T) изображен на фиг. 10 при условии, что ω(N) постоянна.
Поскольку знак Θdev(T) не имеет значения для параметра указанной обратной волны, связанного с энергией/интенсивностью/объемом, то абсолютное значение Θdev(T) приводит и к локальному экстремуму, и к скорости изменения локального экстремума не только в момент Ttoe(N) и момент Theel(N), но также и в момент Tsole(N).
Указанный сигнал измерения может быть оптимизирован посредством регулирования площади поперечного сечения указанной по меньшей мере одной определяющей волны в соответствии с гладкостью поверхности G и расстоянием от Н до G и/или посредством выбора физических свойств и частоты указанной по меньшей мере одной определяющей волны в соответствии с материалом и отражательной способностью G. На фиг. 11 изображен типичный пример указанного сигнала измерения, в котором инфракрасный лазерный луч проецировали на внутреннюю поверхность самой шины 185/65R14, и сигнал измерения соответствовал световому потоку указанной обратной волны, принятой в точке Н датчиком инфракрасного излучения.
Далее устанавливают обрабатывающий модуль. Указанный обрабатывающий модуль принимает указанный сигнал измерения, имеет комбинированную способность вычисления на базе аппаратного и программного обеспечения, и выполнен с возможностью маркировки события в соответствии с его собственной шкалой времени и хранения/регистрации существенных данных в памяти, а также с возможностью идентификации по меньшей мере одного из локального экстремума и скорости изменения локального экстремума, связанных с указанным сигналом измерения. Если имеется дополнительный акселерометр, электрически соединенный с указанным обрабатывающим модулем или встроенный в него, любой из параметров ω(N) и Period(N) или оба эти параметра могут быть получены при помощи указанного акселерометра и указанных вычислений.
Например, указанный обрабатывающий модуль, возможно, записал два момента времени Ttoe(N) и Theel(N) в одном случае и получил параметр Period(N) при наличии указанного акселерометра, тогда центральный угол Θ пятна контакта шины (который здесь равен Θsole(N)) в этом случае определяют на основании двух моментов времени и периода Period(N) по формуле: Θsole(N)=36O°⋅(Theel(N)-Ttoe(N))/Period(N). Предположим, в другом случае были зарегистрированы три момента Ttoe(N), Theel(N) и Ttoe(N+1), тогда очевидно, что Period(N) заключен в трех моментах: Θsole(N)-360°⋅(Theel(N)-Ttoe(N))/(Ttoe(N+1)-Ttoe(N)).
Предположим, что еще в одном случае указанный обрабатывающий модуль зарегистрировал последовательно моменты Ttoe(N), Tsole(N), Theel(N), Ttoe(N+1), Tsole(N+1) и Theel(N+1), тогда среднее значение Period(N) усредняют по формуле:
Period(N)=((Theel(N+1)-Theel(N))⋅(Ttoe(N+1)-Ttoe(N)))0,5, тот же принцип применим к Θsole(N):
Θsole(N)=360°⋅((Theel(N+1)-Ttoe(N+1))⋅(Theel(N)-Ttoe(N)))0,5/Period(N).
Аналогичным образом, Θtoe(N) и Θheel(N) находят таким способом.
Даже если шина не катится с постоянной скоростью, поскольку типичный легковой автомобиль продвигается самое большое на 2,5 метра за один оборот колеса, после достижения определенной скорости, так что ω(N) и ω(N+1) можно считать имеющими одинаковое ускорение, 2 вышеприведенных уравнения могут быть фактически очень хорошей приближенной оценкой. В настоящей заявке приведена приближенная численная оценка для гоночного автомобиля, предполагая, что угловое перемещение одного из колес определяют по формуле: Θtravel(T) = 1389⋅Т2+1000⋅Т, и дополнительно задавая Θsole(N) = 20° и Ttoe(l) = 0 сек. Сначала вычисляют Т для Θtravel(T) = 20°, 360°, 380°, 720°, 740°, 1080°, 1100°, затем, подставляя эти решения в последние два уравнения, получают следующие приблизительные результаты: Period(1) = 0,2595 сек, Θsole(1) = 20,8°; Period(2) = 0,1802 сек,
Θsole(2) = 20,2°; Period(3) = 0,1468 сек, Θsole(3) = 20,0°.
Таким образом, Abcd = 2⋅W⋅R⋅Sin(Θsole(N)/2), ΔZ=R⋅(1-Cos(Θsole(N)/2)),
ω(N)=360°/Period(N).
Для более точного вычисления нагрузки L на шину помимо давления Р шины требуется коэффициент Kcarcass(ΔZ) жесткости каркаса шины: LΔ P⋅Abcd+ΔZ⋅Kcarcass(ΔZ). Последний может быть введен в обрабатывающий модуль посредством проводной или беспроводной связи после сканирования штрих-кода конкретной шины или при помощи созданной базы данных, хранящейся в памяти указанного обрабатывающего модуля, после распознавания радиочастотного идентификатора (RFID) конкретной шины.
Аналогичным образом, продольную силу F(N) трения получают посредством моделирования деформации шины в одном направлении как смещения в этом направлении эквивалентной пружины: F(N)=(Θheel(N)/Θtoe(N)-1)⋅K(P,L,Θheel(N)/Θtoe(N)), таким образом Θheel(N)/Θtoe(N) можно рассматривать как коэффициент, относящийся к продольному смещению или деформации в эквивалентной пружинной модели.
При торможении со стороны опорной поверхности на шину действует большая сила, так что ω(N) может измениться мгновенно, в этот момент указанный обрабатывающий модуль должен зарегистрировать последовательные серии моментов Ttoe(N), Tsole(N) и Theel(N) и вычислить на поцикловой основе наибольшую возможную частоту обновления по следующей формуле:
Θheel(N)/Θtoe(N)=(Theel(N)-Tsole(N))/(Tsole(N)-Ttoe(N)).
Указанный акселерометр имеет еще много преимуществ в настоящем изобретении, он обеспечивает реагирование обрабатывающего модуля на тормозное замедление для экономии энергии, при этом оставаясь наготове, кроме того сопутствующие возможности самоконтроля и калибровки являются существенными для обеспечения более законченной системы.
Хотя предпочтительно, чтобы обрабатывающий модуль получал полные серии Ttoe(N), Tsole(N) и Theel(N) более чем за один оборот шины, иногда вследствие, может быть, плохих дорожных условий, например, может оказаться, что только Tsole(N), Ttoe (N+1) и Ttoe (N+2) были зарегистрированы за несколько последовательных оборотов. Даже в таком случае в целом применимы следующие расчеты:_
Period(N+1)=Ttoe(N+2)-Ttoe(N+1),
Θsole(N+1)=720°⋅(Period(N+1)+Tsole(N)-Ttoe(N+1))/Period(N+1).
Для работы в различных дорожных условиях указанный обрабатывающий модуль должен быть включен в разные стратегии, будь это получение большего количества наборов данных для выведения средних значений новых и старых результатов, продолжение процесса регистрации/вычислений/скрининга до тех пор, пока скорость шины не стабилизируется, ожидание сигнала управления от транспортного средства и реагирования на него или просто временное введение спящего режима и т.д.
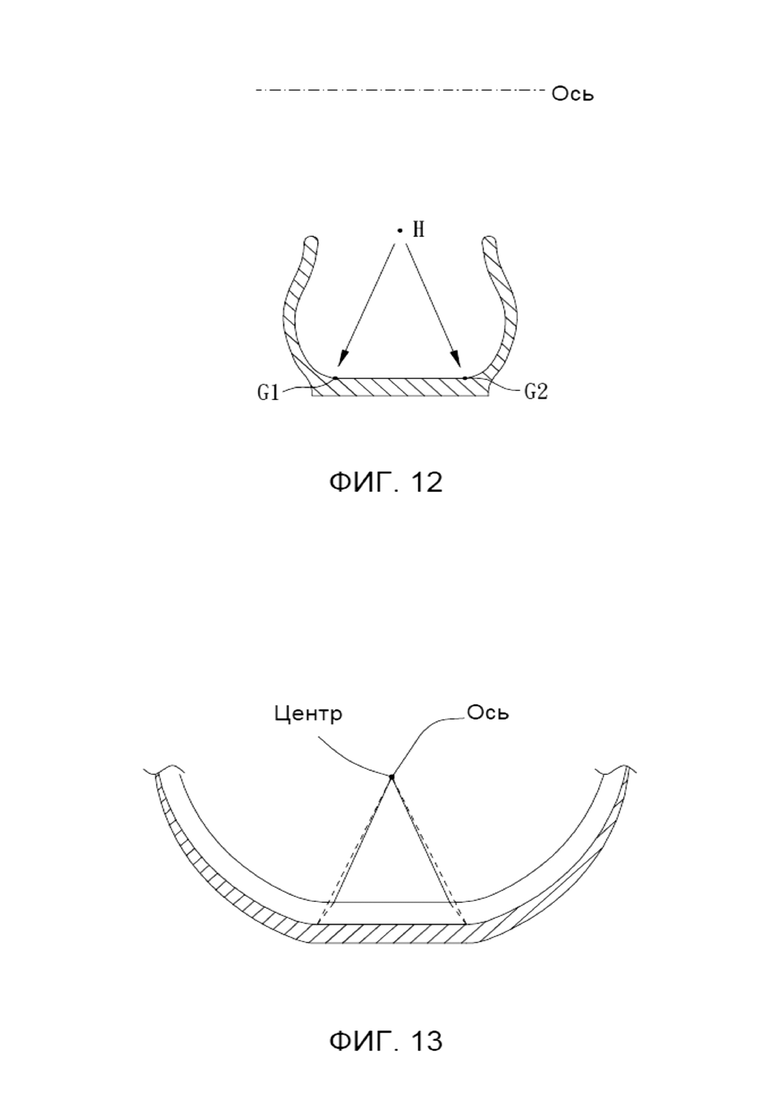
Для определения бокового наклона следует обратиться к фиг. 12. Указанный по меньшей мере один источник излучения волн расположен в точке Н и проецирует указанную по меньшей мере одну определяющую волну по линейной траектории на указанную внутреннюю поверхность, причем линейная траектория параллельна Оси. На внутренней поверхности устанавливают 2 отражающие точки G1 и G2, которые симметричны относительно I. Кроме того, устанавливают два датчика волн с обеих сторон от точки Н, которые параллельны Оси и симметричны относительно Н, причем указанные два датчика волн принимают соответственно указанную обратную волну, отражаемую от точек G1 и G2, и выводят соответствующие сигналы измерения. Указанный обрабатывающий модуль принимает указанные сигналы измерения для вычисления центральных углов пятна контакта шины на внутренней и наружной сторонах соответственно.
Когда шина наклоняется вбок, ее центральный угол пятна контакта увеличивается с одной стороны и уменьшается с другой стороны, на фиг. 13 изображен осевой разрез такого состояния, где сплошные и пунктирные треугольники образованы каждым центральным углом пятна контакта шины, пересекающимся с указанной внутренней поверхностью. Указанный обрабатывающий модуль дополнительно вычисляет боковой наклон с центральными углами пятна контакта шины на внутренней и наружной сторонах или просто отыскивает его в созданной базе данных соответствующих испытаний.
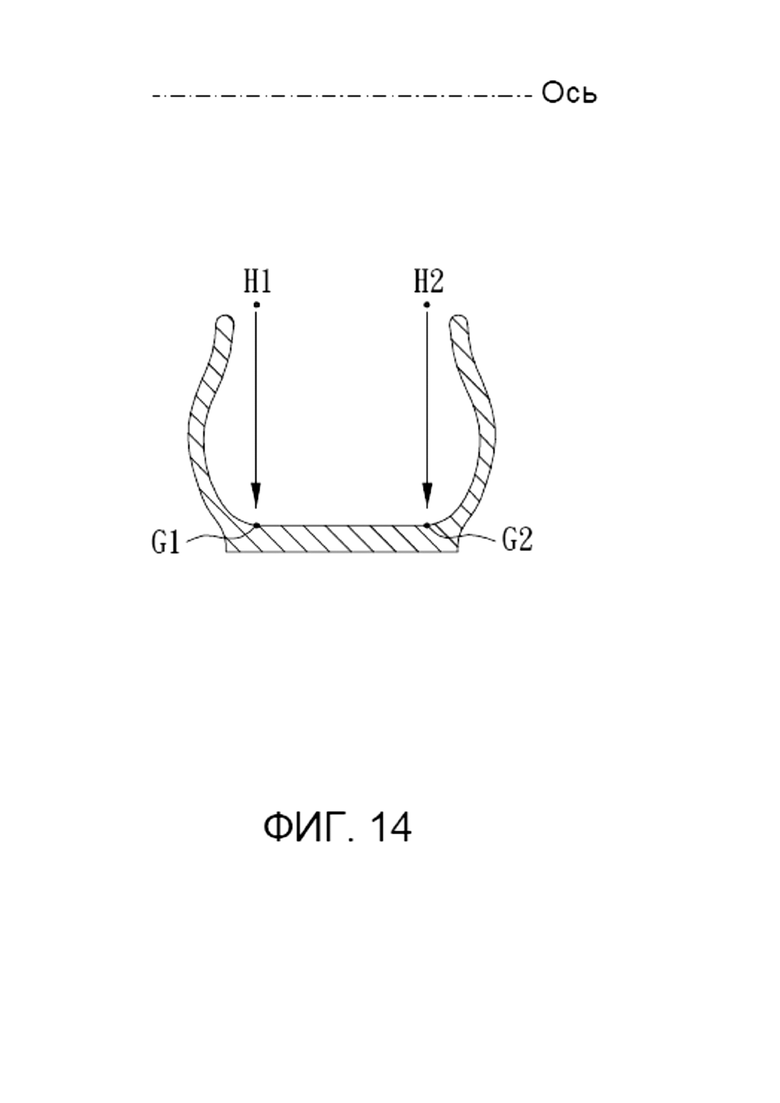
На фиг. 14 изображен альтернативный вариант осуществления изобретения для бокового наклона, где два комплекта источника излучения волн и датчика волн расположены соответственно в точках H1 и Н2 с соответствующими отражающими точками G1 и G2, причем H1 и Н2 не связаны. Указанные два комплекта источника излучения волн и датчика волн независимо выполняют функцию проецирования отдельных определяющих волн на соответствующие отражающие точки, приема указанной обратной волны при помощи соответствующих датчиков волн и вывода сигналов измерения соответственно. Указанный обрабатывающий модуль принимает указанные сигналы измерения для вычисления центральных углов пятна контакта шины как на внутренней, так и на наружной сторонах соответственно. Кроме того, указанный обрабатывающий модуль вычисляет указанный боковой наклон или просто отыскивает его в созданной базе данных соответствующих испытаний.
В предпочтительном варианте осуществления настоящее изобретение включает приемопередатчик и модуль отображения информации, кинетические параметры шины являются существенными не только для водителей, но также и для систем управления транспортным средством, таких как антиблокировочная система и система динамической стабилизации для обеспечения повышенной безопасности вождения.
Несмотря на то, что конкретные варианты осуществления настоящего изобретения описаны подробно в иллюстративных целях, могут быть реализованы различные модификации и усовершенствования в пределах сущности и объема настоящего изобретения. Соответственно, изобретение ограничено лишь прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ НАПОЛНЕНИЯ ЧАШКИ В ТОРГОВЫХ АВТОМАТАХ НАПИТКАМИ, ТАКИХ, КАК КОФЕЙНЫЙ АВТОМАТ | 2005 |
|
RU2385286C2 |
| УСТРОЙСТВО ОБРАБОТКИ КОЖИ НА ОСНОВЕ СВЕТА | 2017 |
|
RU2741466C1 |
| СИСТЕМА ДЕТЕКТИРОВАНИЯ ФЛУОРЕСЦЕНЦИИ ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАЧИМЫХ ПАРАМЕТРОВ РАСТИТЕЛЬНОСТИ | 1998 |
|
RU2199730C2 |
| СПОСОБ ОЦЕНКИ СОСТОЯНИЯ СОСУДОВ НА КАЖДОМ СЕРДЕЧНОМ СОКРАЩЕНИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2664632C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ШИН НА ПРОИЗВОДСТВЕННОЙ ЛИНИИ | 2015 |
|
RU2696343C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПРОВЕРКИ ЛИСТОВОГО МАТЕРИАЛА, В ЧАСТНОСТИ БАНКНОТ ИЛИ ЦЕННЫХ БУМАГ | 1996 |
|
RU2169393C2 |
| Измеритель и способ измерения приведенной яркости люминесценции бумаги | 2022 |
|
RU2836737C1 |
| СПОСОБ МАРКИРОВКИ ДВИЖУЩЕГОСЯ МАТЕРИАЛЬНОГО ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2096149C1 |
| УСТРОЙСТВО ОБРАБОТКИ КОЖИ НА ОСНОВЕ СВЕТА | 2017 |
|
RU2766165C2 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ХИМИЧЕСКОГО АНАЛИЗА | 1996 |
|
RU2157987C2 |
Изобретение относится к автомобильной промышленности. Система определения кинетических параметров шины включает в себя: по меньшей мере один источник излучения волн, выполненный с возможностью вращения вместе с шиной и излучения по меньшей мере одной определяющей волны в направлении внутренней поверхности указанной шины; по меньшей мере один датчик волн, выполненный с возможностью вращения вместе с указанным по меньшей мере одним источником излучения волн и вывода сигнала измерения в соответствии с физическим параметром по меньшей мере одной указанной определяющей волны, отражаемой от указанной внутренней поверхности; и обрабатывающий модуль, выполненный с возможностью приема указанного сигнала измерения, регистрации по меньшей мере двух моментов времени, в течение которого указанная по меньшей мере одна определяющая волна проходит через пятно контакта указанной шины, и вычисления кинетического параметра указанной шины по меньшей мере с двумя указанными моментами времени. Технический результат – повышение точности определения кинетических параметров шины. 10 з.п. ф-лы, 14 ил.
1. Система определения кинетических параметров шины, включающая в себя:
по меньшей мере один источник излучения волн, выполненный с возможностью вращения вместе с шиной и излучения по меньшей мере одной определяющей волны в направлении внутренней поверхности указанной шины;
по меньшей мере один датчик волн, выполненный с возможностью вращения вместе с указанным по меньшей мере одним источником излучения волн и вывода сигнала измерения в соответствии с физическим параметром по меньшей мере одной указанной определяющей волны, отражаемой от указанной внутренней поверхности; и
обрабатывающий модуль, выполненный с возможностью приема указанного сигнала измерения, регистрации по меньшей мере двух моментов времени, в течение которого по меньшей мере одна указанная определяющая волна проходит через пятно контакта указанной шины, и вычисления кинетического параметра указанной шины по меньшей мере с двумя указанными моментами времени.
2. Система определения кинетических параметров шины по п. 1, в которой указанный обрабатывающий модуль регистрирует три момента времени, в течение которого по меньшей мере одна указанная определяющая волна проходит через указанное пятно контакта указанной шины, и вычисляет продольный кинетический параметр указанной шины с тремя указанными моментами времени, причем указанный продольный кинетический параметр является одним из следующих параметров: сила трения, смещение и деформация.
3. Система определения кинетических параметров шины по п. 1, в которой указанный обрабатывающий модуль идентифицирует по меньшей мере одно из локального экстремума и скорости изменения локального экстремума, связанных с указанным сигналом измерения, и регистрирует по меньшей мере один из двух моментов, связанных с указанным локальным экстремумом и указанной скоростью изменения локального экстремума.
4. Система определения кинетических параметров шины по п. 1, дополнительно включающая отражающий элемент, причем указанный отражающий элемент прикреплен к указанной внутренней поверхности.
5. Система определения кинетических параметров шины по п. 1, в которой указанный обрабатывающий модуль вычисляет центральный угол пятна контакта шины с указанными по меньшей мере двумя моментами и циклическим периодом указанной шины.
6. Система определения кинетических параметров шины по п. 1, в которой указанные по меньшей мере два момента регистрируют за один оборот указанной шины.
7. Система определения кинетических параметров шины по п. 5, в которой указанный обрабатывающий модуль идентифицирует по меньшей мере одно из локального экстремума и скорости изменения локального экстремума, связанных с указанным сигналом измерения, и регистрирует по меньшей мере один из двух моментов, связанных с указанным локальным экстремумом и указанной скоростью изменения локального экстремума.
8. Система определения кинетических параметров шины по п. 5, дополнительно включающая отражающий элемент, причем указанный отражающий элемент прикреплен к указанной внутренней поверхности.
9. Система определения кинетических параметров шины по п. 5, в которой два датчика волн выполнены с возможностью вращения вместе с указанным по меньшей мере одним источником излучения волн и вывода двух сигналов измерения, причем обрабатывающий модуль принимает два указанных сигнала измерения и вычисляет боковой наклон указанной шины.
10. Система определения кинетических параметров шины по п. 9, в которой указанный обрабатывающий модуль идентифицирует по меньшей мере одно из локального экстремума и скорости изменения локального экстремума, связанных с указанными двумя сигналами измерения, и регистрирует по меньшей мере один из двух моментов, связанных с указанным локальным экстремумом и указанной скоростью изменения локального экстремума.
11. Система определения кинетических параметров шины по п. 9, дополнительно включающая отражающий элемент, причем указанный отражающий элемент прикреплен к указанной внутренней поверхности.
| US 7559235 B2, 14.07.2009 | |||
| US 20060196258 A1, 07.09.2006 | |||
| US 6612164 B1, 02.09.2003 | |||
| US 6967590 B2, 22.11.2005. |

