ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройствам, системам и способам акустической визуализации.
УРОВЕНЬ ТЕХНИКИ И РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В акустической (например, ультразвуковой) визуализации или другой визуализации с помощью активной акустики массив преобразователей вначале передает импульс в среду, обычно с соответствующей задержкой для формирования сфокусированного луча, и затем принимает эхо. Для реконструирования изображения среды используют формирование луча. Качество изображения связано с функцией рассеяния точки (ФРТ) или ответом системы визуализации на отдельную точку. ФРТ связана с апертурой массива. В приближении для дальней зоны боковой профиль ФРТ представляет собой квадрат преобразования Фурье распределения амплитуды в апертуре. Если не используется аподизация, она представляет собой функцию sinc2.
Однако часть апертуры может быть заблокирована одним или более препятствиями. В медицинской ультразвуковой диагностике препятствие может представлять собой ребро. Например, ультразвуковая визуализация сердца сквозь грудную клетку (трансторакальная ультразвуковая визуализация) осложняется присутствием ребер, которые могут блокировать часть апертуры, если она слишком велика. Если заблокированная часть апертуры расположена вдоль края апертуры, это будет приводить к потере разрешения. Если она расположена в пределах апертуры, это будет приводить к дифракционным лепесткам, которые могут серьезно снизить качество изображения. Такое же явление возникает в результате промежутка в апертуре, который может быть вызван нефункционирующими элементами массива преобразователей или попыткой когерентной визуализации с помощью двух ультразвуковых массивов, которые разделены промежутком. С другой стороны, если используют меньшую апертуру, которая помещается в пространстве между двумя ребрами (далее в данном документе называемом «межреберным промежутком»), то поле обзора и разрешение ультразвукового изображения ограничены.
Соответственно, желательным является создание способа и системы ультразвуковой визуализации, которые смогут использовать большую когерентную апертуру, охватывающую несколько межреберных пространств.
В одном аспекте настоящего изобретения способ содержит: применение массива акустических преобразователей для формирования данных изображения для области визуализации, причем одно или более препятствий присутствуют между массивом акустических преобразователей и по меньшей мере частью области визуализации; использование избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий; и формирование изображения области визуализации из компенсированного изображения.
В некоторых вариантах осуществления использование избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирование изображения области визуализации из компенсированных данных изображения содержат: определение обратного фильтра для массива акустических преобразователей, причем, когда данный обратный фильтр умножают на угловой спектр для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива акустических преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий; взвешивание сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема, и формирование акустического изображения посредством суммирования взвешенных сигналов всех пар передачи-приема.
В некоторых вариантах осуществления использование избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирование изображения области визуализации из компенсированных данных изображения содержат: осуществление по меньшей мере первой и второй операций передачи и приема с использованием по меньшей мере первой и второй функций аподизации, включающее в себя: осуществление первой операции передачи и приема посредством применения массива акустических преобразователей для передачи первой акустической волны в область визуализации, и для приема обратно из области визуализации первого акустического эха, и для формирования из него первых данных изображения, причем к массиве акустических преобразователей применяют первую функцию аподизации для формирования первой апертуры передачи и первой апертуры приема для первой операции передачи и приема, и осуществление второй операции передачи и приема посредством применения массива акустических преобразователей для передачи второй акустической волны в область визуализации, и для приема обратно из области визуализации второго акустического эха, и для формирования из него вторых данных изображения, причем к массиве акустических преобразователей применяют вторую функцию аподизации для формирования второй апертуры передачи и второй апертуры приема для второй операции передачи и приема; и формирование изображения области визуализации посредством объединения первых данных изображения со вторыми данными изображения. По меньшей мере первую и вторую функции аподизации определяют из обратного фильтра для массива акустических преобразователей по отношению к области визуализации, причем, когда данный обратный фильтр умножают на угловой спектр для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива акустических преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий.
В некоторых вариантах осуществления использование избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирование изображения области визуализации из компенсированных данных изображения содержат выполнение основанного на РЧ-данных (до детектирования) или основанного на изображении алгоритма обратной свертки.
В другом аспекте настоящего изобретения устройство для визуализации области визуализации содержит: массив акустических преобразователей, выполненную с возможностью формирования данных изображения для области визуализации, причем одно или более препятствий присутствуют между массивом акустических преобразователей и по меньшей мере частью области визуализации; и один или более процессоров, выполненных с возможностью использования избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирования изображения области визуализации из компенсированных данных изображения.
В некоторых вариантах осуществления один или более процессоров выполнены с возможностью использования избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирования изображения области визуализации из компенсированных данных изображения посредством: определения обратного фильтра для массива акустических преобразователей, причем, когда данный обратный фильтр умножают на угловой спектр для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива акустических преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий; взвешивания сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема, и формирования акустического изображения посредством суммирования взвешенных сигналов всех пар передачи-приема.
В некоторых вариантах осуществления один или более процессоров выполнены с возможностью использования избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирования изображения области визуализации из компенсированных данных изображения посредством: осуществления по меньшей мере первой и второй операций передачи и приема с использованием по меньшей мере первой и второй функций аподизации, включающего в себя: осуществление первой операции передачи и приема посредством применения массива акустических преобразователей для передачи первой акустической волны в область визуализации, и для приема обратно из области визуализации первого акустического эха, и для формирования из него первых данных изображения, причем к массиве акустических преобразователей применяют первую функцию аподизации для формирования первой апертуры передачи и первой апертуры приема для первой операции передачи и приема, и осуществление второй операции передачи и приема посредством применения массива акустических преобразователей для передачи второй акустической волны в область визуализации, и для приема обратно из области визуализации второго акустического эха, и для формирования из него вторых данных изображения, причем к массиве акустических преобразователей применяют вторую функцию аподизации для формирования второй апертуры передачи и второй апертуры приема для второй операции передачи и приема; и формирования изображения области визуализации посредством объединения первых данных изображения со вторыми данными изображения. По меньшей мере первую и вторую функции аподизации определяют из обратного фильтра для массива акустических преобразователей по отношению к области визуализации, причем, когда данный обратный фильтр умножают на угловой спектр для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива акустических преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий.
В некоторых вариантах осуществления один или более процессоров выполнены с возможностью использования избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирования изображения области визуализации из компенсированных данных изображения посредством выполнения основанного на РЧ-данных (до детектирования) или основанного на изображении алгоритма обратной свертки.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 иллюстрирует межреберные промежутки в апертуре акустического изображения, которые могут возникать из-за присутствия ребер между акустическим преобразователем и по меньшей мере частью области визуализации.
Фиг. 2 иллюстрирует сильные дифракционные лепестки, наблюдаемые с каждой стороны основного лепестка на акустическом изображении, формируемом в такой ситуации, как проиллюстрированная на фиг. 1.
Фиг. 3 иллюстрирует один вариант осуществления устройства акустической визуализации.
Фиг. 4 представляет собой блок-схему, иллюстрирующую один вариант осуществления способа 400 визуализации области визуализации, когда одно или более препятствий присутствуют между устройством визуализации и по меньшей мере частью области визуализации.
Фиг. 5 иллюстрирует примеры: (1) идеального углового спектра для массива акустических преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий; и (2) углового спектра для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий.
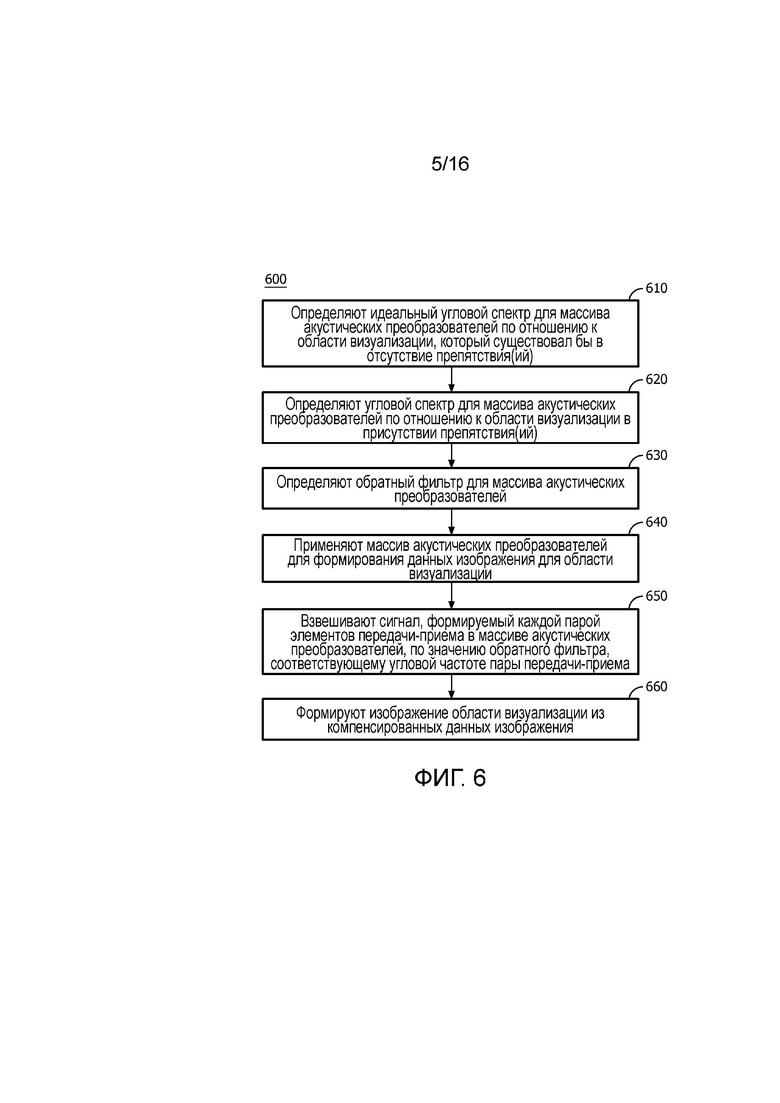
Фиг. 6 представляет собой блок-схему, иллюстрирующую другой вариант осуществления способа визуализации области визуализации, когда одно или более препятствий присутствуют между устройством визуализации и по меньшей мере частью области визуализации.
Фиг. 7 показывает модель ребра, иллюстрирующую, как можно использовать алгоритм трассировки лучей для детектирования того, какая точка изображения видит какой преобразовательный элемент в массиве преобразователей.
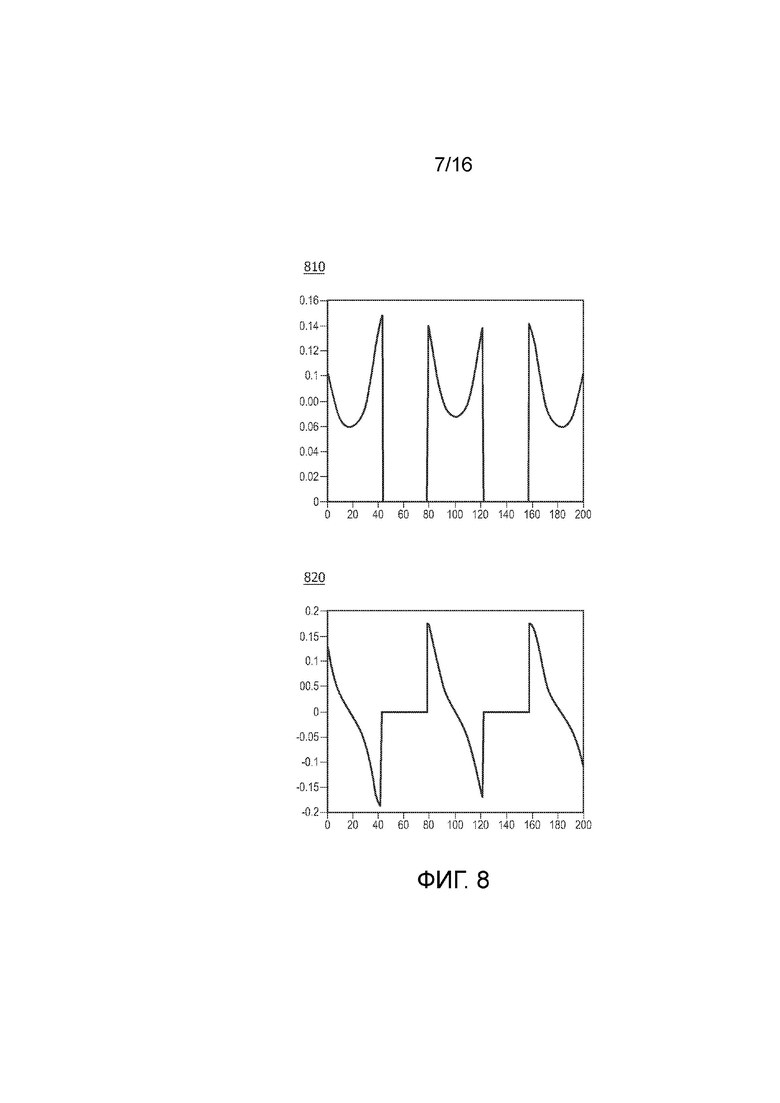
Фиг. 8 иллюстрирует функции аподизации для двух наборов апертур передачи-приема для применения в двух операциях передачи и приема.
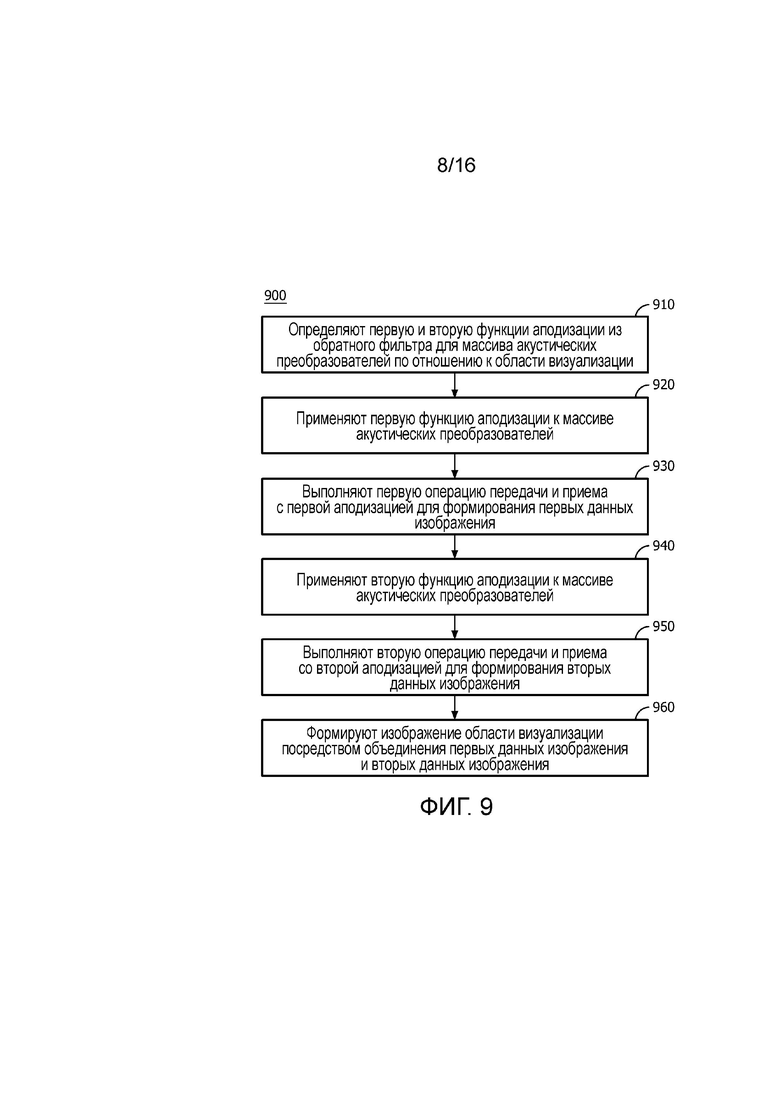
Фиг. 9 представляет собой блок-схему, иллюстрирующую еще один вариант осуществления способа визуализации области визуализации, когда одно или более препятствий присутствуют между устройством визуализации и по меньшей мере частью области визуализации.
Фиг. 10 иллюстрирует функцию рассеяния точки для такой же ситуации, как проиллюстрированная на фиг. 2, когда применяют алгоритм компенсации для межреберных пространств.
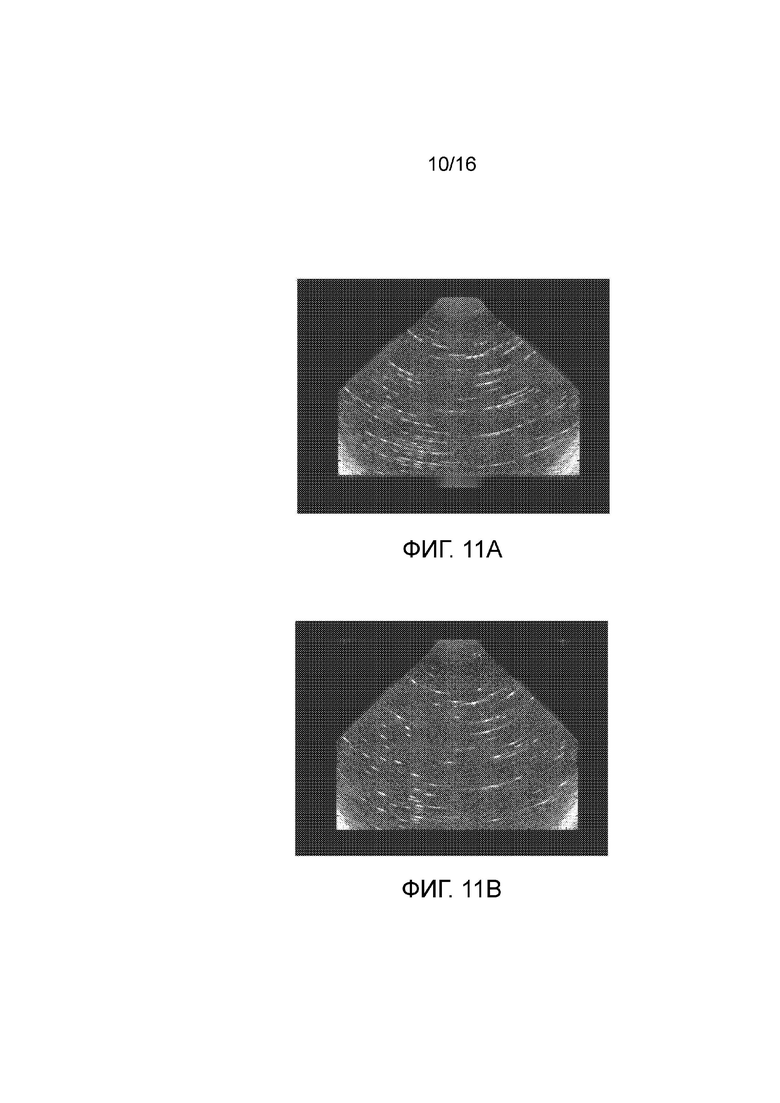
Фиг. 11A и 11B иллюстрируют моделированные изображения при наличии межреберных промежутков в большой апертуре с компенсацией и без нее соответственно.
Фиг. 12A иллюстрирует трансторакальную эхокардиограмму, сформированную с использованием большой апертуры при моделировании двух преград (например, из-за двух ребер).
Фиг. 12B иллюстрирует трансторакальную эхокардиограмму, сформированную с использованием большой апертуры при моделировании двух преград (например, из-за двух ребер) и применении алгоритма компенсации межреберных промежутков.
Фиг. 12C иллюстрирует эталонную трансторакальную эхокардиограмму, сформированную с использованием большой апертуры, как и на фиг 12A, но когда преград нет.
Фиг. 12D иллюстрирует трансторакальную эхокардиограмму, сформированную с использованием меньшей апертуры, чем использованная для создания фиг. 12A-C.
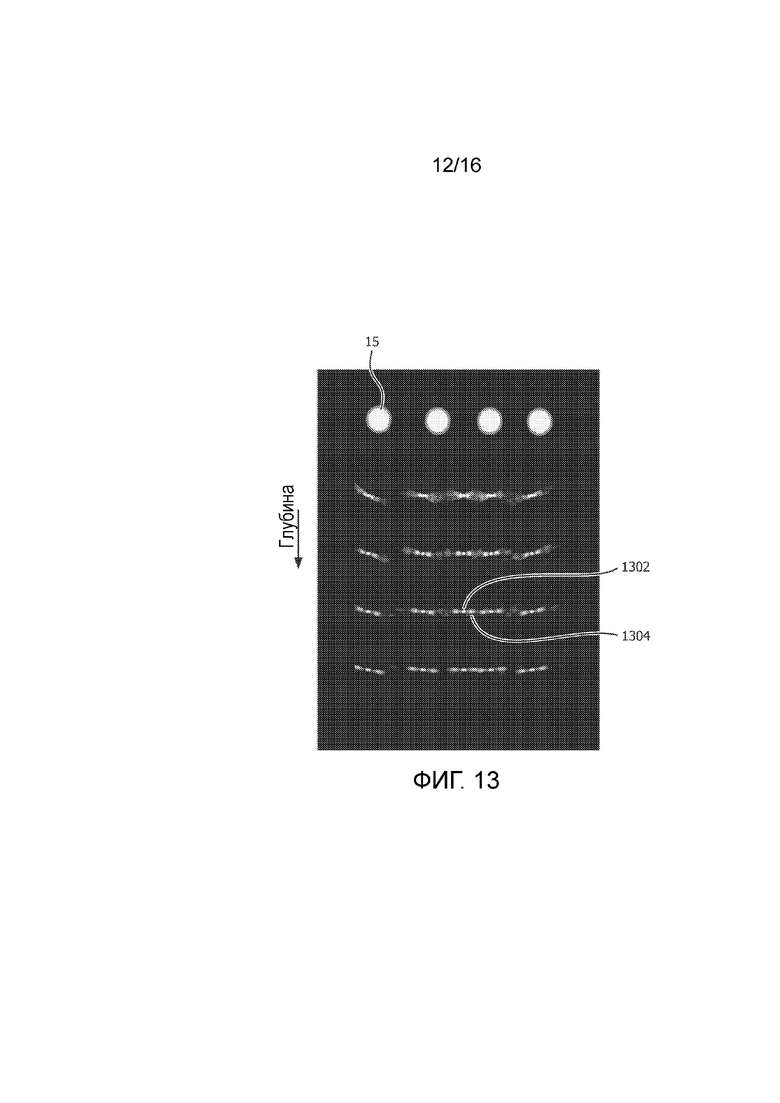
Фиг. 13 иллюстрирует когерентное изображение, сформированное в присутствии ребер.
Фиг. 14A иллюстрирует изображение, сформированное в присутствии ребер, аналогичное показанному на фиг. 13, при применении когерентного объединения с использованием алгоритма «компенсации межреберных промежутков».
Фиг. 14B иллюстрирует изображение, аналогичное показанному на фиг. 13 и 14A, которое было бы сформировано при полном отсутствии ребер.
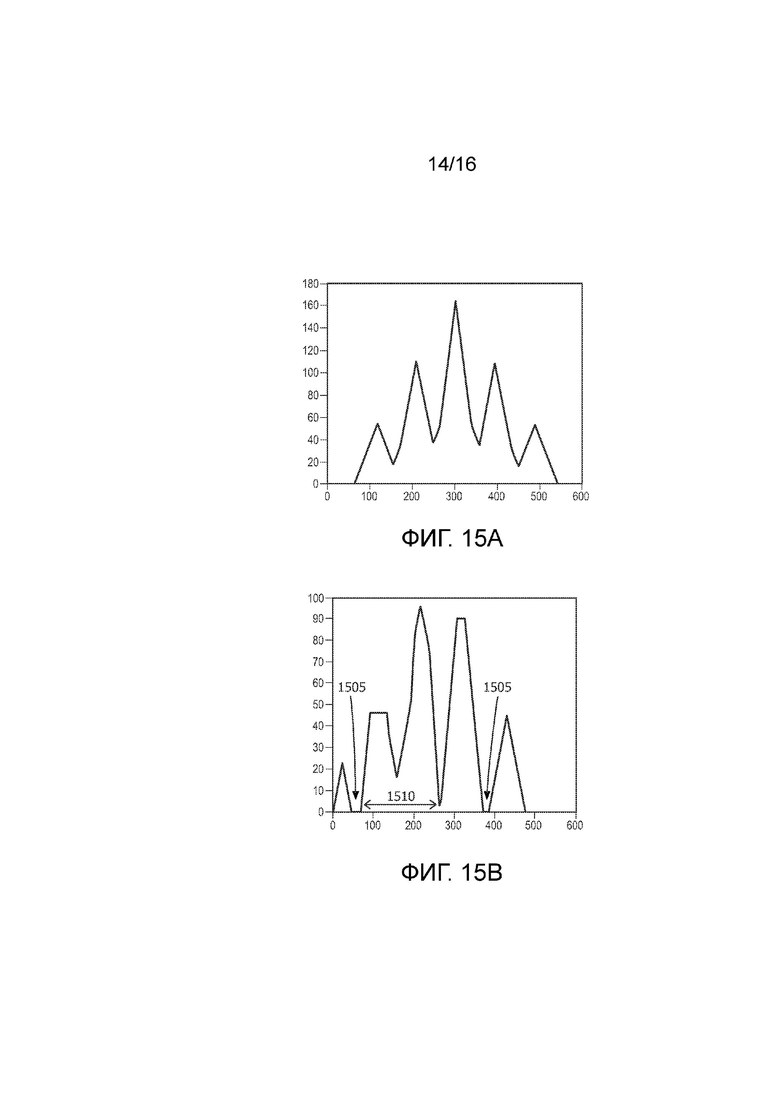
Фиг. 15A иллюстрирует угловой спектр для точки в центре поля в дальней зоне в модели, проиллюстрированной на фиг. 8.
Фиг. 15B иллюстрирует угловой спектр для точки ближе к массиве акустических преобразователей и на краю изображения в модели, проиллюстрированной на фиг. 8.
Фиг. 16 иллюстрирует для примера с фиг. 8 максимальный размер апертуры при прохождении в прямом и обратном направлении, который может быть реконструирован с помощью алгоритма для различных точек изображения.
Фиг. 17 иллюстрирует результаты алгоритма компенсации, когда ребра так же велики, как и межреберные пространства.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее в настоящем документе настоящее изобретение будет описано более полным образом со ссылками на сопровождающие чертежи, на которых показаны предпочтительные варианты осуществления настоящего изобретения. Настоящее изобретение может, однако, быть реализовано в различных формах и не должно быть истолковано как ограниченное вариантами осуществления, изложенными в настоящем документе. Вернее, данные варианты осуществления приведены в качестве обучающих примеров настоящего изобретения.
Фиг. 1 иллюстрирует межреберные промежутки в апертуре акустического изображения, которые могут возникать из-за присутствия препятствий (например, ребер), расположенных между акустическим преобразователем и по меньшей мере частью области визуализации.
В частности, фиг. 1 иллюстрирует акустический зонд 10 (например, ультразвуковой зонд), включающий в себя массив 10' акустических преобразователей для визуализации области 7 визуализации, которая включает в себя интересующую область 5 (ROI), например сердце. Область 7 визуализации также включает в себя множество препятствий 15-1, 15-2, 15-3, например ребер, которые разнесены и отделены друг от друга межреберными пространствами 11-1 и 11-2. В общем случае акустический зонд 10 и массив 10' акустических преобразователей могут являться компонентами устройства акустической визуализации (например, ультразвуковой системы визуализации). Массив 10' акустических преобразователей включает в себя множество акустических элементов (например, ультразвуковых элементов). Акустические элементы массива 10' акустических преобразователей могут быть выполнены с возможностью осуществления операции передачи посредством приема электрического сигнала, например от микроформирователя лучей устройства акустической визуализации, и передачи в ответ на него соответствующего акустического сигнала в область 7 визуализации. Акустические элементы массива 10' акустических преобразователей могут также быть выполнены с возможностью осуществления операции приема посредством приема акустического сигнала (например, акустического эха) от области 7 визуализации и подачи в ответ на него соответствующего электрического сигнала на схемы обработки сигналов устройства акустической визуализации. Дополнительные детали примеров вариантов осуществления акустического зонда 10, массива 10' акустических преобразователей и устройства акустической визуализации, которое включает в себя акустический зонд 10 и массив 10' акустических преобразователей, будут приведены ниже в связи с описанием фиг. 3.
При работе апертуры 110-1 и 110-2 формируются массивом 10' акустических преобразователей из соответствующих секторных сканирований 120 и 122 области 7 визуализации и, в частности, ROI 5. Как можно видеть на фиг. 1, в данном примере препятствия 15-1, 15-2, 15-3 расположены между массивом 10' акустических преобразователей и ROI 5. Соответственно, сканирование 120 включает в себя первую часть 120-1, которая заблокирована или закрыта препятствием 15-1, вторую часть 120-2, которая проходит через межреберное пространство 11-1 и содержит поле обзора апертуры 110-1, и третью часть 120-3, которая заблокирована или закрыта препятствием 15-2. Аналогичным образом, сканирование 122 включает в себя первую часть 122-1, которая заблокирована или закрыта препятствием 15-2, вторую часть 122-2, которая проходит через межреберное пространство 11-2 и содержит поле обзора апертуры 110-2, и третью часть 122-3, которая заблокирована или закрыта препятствием 15-3.
Устройство акустической визуализации применяет для реконструирования изображения области 7 визуализации формирование луча. Качество изображения связано с функцией рассеяния точки (ФРТ) или ответом устройства акустической визуализации на отдельную точку. ФРТ связана с апертурой(ами) 110-1, 110-2 и так далее массива 10' акустических преобразователей. В приближении для дальней зоны боковой профиль ФРТ представляет собой квадрат преобразования Фурье распределения амплитуды в апертуре. Если к апертуре(ам) не применяется аподизация, ФРТ представляет собой функцию sinc2. Однако, как проиллюстрировано на фиг. 1, часть апертуры (апертур) заблокирована одним или более препятствиями. Если заблокированная часть апертуры расположена вдоль края апертуры, это будет приводить к потере разрешения. Если она расположена в пределах апертуры, это будет приводить к дифракционным лепесткам, которые могут серьезно снизить качество изображения. Такое же явление возникает в результате промежутка в апертуре, который может быть вызван нефункционирующими элементами или попыткой когерентной визуализации с помощью двух зондов, которые разделены промежутком.
Фиг. 2 иллюстрирует, что с каждой стороны основного лепестка 202 наблюдаются сильные дифракционные лепестки 204 на акустическом изображении 200, формируемом с помощью акустического зонда 10 в такой ситуации, как проиллюстрированная на фиг. 1 и описанная выше, когда препятствия блокируют визуализацию одной или более частей области визуализации одной или более апертурами. В частности, фиг. 2 изображает моделированную ФРТ, когда 200-элементную апертуру разделяют на три 42-элементные субапертуры, разделенные двумя 37-элементными промежутками (в данном случае смоделированными с помощью неактивных элементов). Точки моделированных фантомов расположены на глубине 4, 8, 12 и 16 см, причем глубина увеличивается от верхнего изображения к нижнему.
Авторы настоящего изобретения обнаружили и приняли во внимание, что, когда промежуток или преграда разделяет большую апертуру на несколько субапертур, разрешение полной неблокированной апертуры может быть восстановлено с использованием алгоритма компенсации при условии, что промежутки меньше, чем субапертуры. В различных вариантах осуществления, описанных ниже, алгоритмы компенсации используют избыточность сигнала, проходящего в прямом и обратном направлении. В частности, различные варианты осуществления, описанные ниже, основаны на концепции избыточности проходящего в прямом и обратном направлении ультразвукового сигнала [1]: Пусть NTx и NRx представляют собой индексы передающего и соответствующего принимающего элемента в массиве акустических преобразователей. В поле в дальней зоне (и в отсутствие фазовых аберраций) сигналы для всех пар элементов Tx/Rx, таких что сумма NTx+NRx является постоянной, идентичны. Поэтому, если некоторых из пар недостает, поскольку они заблокированы ребрами, их можно заменить идентичными парами, которые не заблокированы.
Фиг. 3 иллюстрирует один вариант осуществления устройства 300 акустической визуализации, который может реализовывать один или более способов или алгоритмов компенсации для использования избыточности ультразвукового сигнала, проходящего в прямом и обратном направлении, для компенсации промежутка и преграды в апертуре(ах) массива преобразователей. В устройстве 300 акустической визуализации предусмотрен массив 10' акустических преобразователей (например, массив емкостных микромеханических ультразвуковых преобразователей (CMUT)) в акустическом зонде 10 для передачи ультразвуковых волн и приема информации эха. массив 10' преобразователей может в качестве альтернативы содержать пьезоэлектрические преобразовательные элементы, выполненные из таких материалов, как PZT или PVDF. Массив 10' преобразователей представляет собой одно- или двухмерный массив преобразовательных элементов, способных к сканированию в 2D-плоскости и/или в трех измерениях для 3D-визуализации. Массив 10' преобразователей соединен с микроформирователем 12 лучей в акустическом зонде 10, который управляет передачей и приемом сигналов с помощью элементов массива CMUT или пьезоэлектрических элементов. Микроформирователи лучей способны к по меньшей мере частичному формированию лучей сигналов, принимаемых группами или «сегментами» преобразовательных элементов, как описано в патентах США 5,997,479 (Savord et al.), 6,013,032 (Savord) и 6,623,432 (Powers et al.). Микроформирователь 12 лучей соединен кабелем зонда с переключателем 16 передачи-приема (T/R), который осуществляет переключение между передачей и приемом и защищает главный формирователь 20 лучей от передаваемых сигналов высокой энергии, когда микроформирователь 12 лучей не используется, и массив 10' преобразователей управляется непосредственно главным формирователем 20 лучей системы. Передача ультразвуковых лучей от массива 10 преобразователей под управлением микроформирователя 12 лучей управляется контроллером 18 преобразователей, соединенным с микроформирователем лучей с помощью переключателя T/R и с главным формирователем 20 лучей системы, который принимает ввод от пользовательских действий интерфейса пользователя или панели 38 управления. Одной из функций, управляемых контроллером 18 преобразователей, является направление, в котором следуют и сфокусированы лучи. Лучи могут следовать прямо вперед (ортогонально) из массива 10' преобразователей или под различными углами для более широкого поля обзора. Контроллер 18 преобразователей может быть соединен с управлением регулятором 45 смещения постоянным током для массива CMUT. Регулятор 45 смещения постоянным током устанавливает напряжение(я) смещения постоянным током, которое прикладывается к элементам CMUT.
Сигналы частично сформированного луча, производимые микроформирователем 12 лучей при приеме, передаются на главный формирователь 20 луча, где сигналы частично сформированного луча от отдельных сегментов преобразовательных элементов объединяются в сигнал полностью сформированного луча. Например, главный формирователь 20 лучей может иметь 128 каналов, каждый из которых принимает сигнал частично сформированного луча от сегмента из преобразовательных элементов CMUT или пьезоэлектрических элементов. В некоторых вариантах осуществления каждый сегмент может содержать десятки или сотни преобразовательных элементов CMUT или пьезоэлектрических элементов. Таким образом, сигналы, принимаемые с помощью большого количества преобразовательных элементов (например, десятков, сотен или тысяч элементов) массива 10' преобразователей могут эффективно вносить вклад в один сигнал сформированного луча.
Сигналы сформированного луча передаются на сигнальный процессор 22. Сигнальный процессор 22 может обрабатывать принимаемые эхо-сигналы различными способами, такими как полосовая фильтрация, децимация, разделение компонентов I и Q и гармоническое разделение сигналов, которые действуют так, чтобы разделять линейные и нелинейные сигналы таким образом, чтобы делать возможной идентификацию нелинейных (высших гармоник основной частоты) эхо-сигналов, возвращающихся от ткани и микропузырьков. Сигнальный процессор также может осуществлять дополнительное усиление сигнала, такое как уменьшение зернистости, объединение сигналов и устранение шума. Полосовой фильтр в сигнальном процессоре может представлять собой следящий фильтр, причем его полоса пропускания меняется от полосы более высоких частот до полосы более низких частот при приеме эхо-сигналов при возрастании глубины, что устраняет шум на более высоких частотах с большей глубины, где эти частоты не несут анатомической информации.
Обработанные сигналы передаются на процессор 26 B-режима и доплеровский процессор 28. Процессор 26 B-режима использует определение амплитуды принимаемого акустического сигнала для визуализации структур в организме, таких как ткань органов и сосуды в организме. Изображения структуры организма в B-режиме могут быть сформированы или в гармоническом режиме изображения, или в базовом режиме изображения, или в комбинации их обоих, как описано в патенте США 6,283,919 (Roundhill et al.) и в патенте США 6,458,083 (Jago et al.). Доплеровский процессор 28 обрабатывает разделенные во времени сигналы от движения ткани и потока крови для детектирования движения вещества, такого как поток клеток крови, в поле изображения. Доплеровский процессор обычно использует фильтр стенок с параметрами, которые могут быть установлены так, чтобы пропускать и/или отклонять эхо, возвращающееся от выбранных типов материалов в организме. Например, фильтр стенок может быть настроен так, чтобы он имел характеристику полосы пропускания, которая пропускает сигнал относительно низкой амплитуды от материалов с более высокой скоростью, в то же время отклоняя относительно сильные сигналы от материала с более низкой или нулевой скоростью. Данная характеристика полосы пропускания будет пропускать сигналы от текущей крови, в то же время отклоняя сигналы от ближайших неподвижных или медленно движущихся объектов, таких как стенка сердца. Обратная характеристика будет пропускать сигналы от движущейся ткани сердца, в то же время отклоняя сигналы потока крови, для того, что называют доплеровской визуализацией ткани, обнаруживающей и изображающей движение ткани. Доплеровский процессор принимает и обрабатывает последовательность дискретных во времени эхо-сигналов от различных точек на поле изображения, последовательность эха от конкретной точки называется ансамблем. Ансамбль эха, принятого в быстрой последовательности за относительно малый интервал, можно использовать для оценки частоты доплеровского сдвига текущей крови, указывающей, с помощью соотношения между доплеровской частотой и скоростью, на скорость потока крови. Ансамбль эха, принятого за продолжительный период времени, используют для оценки скорости медленно текущей крови или медленно движущейся ткани.
Структурные сигналы и сигналы движения, формируемые процессором B-режима и доплеровским процессором, передаются на скан-конвертер 32 и модуль 44 мультипланарной реформации. Скан-конвертер упорядочивает эхо-сигналы в пространственной взаимосвязи, в которой они приняты, в требуемом формате изображения. Например, скан-конвертер может переводить эхо-сигнал в двумерный (2D) формат в форме сектора или в пирамидальное трехмерное (3D) изображение. Скан-конвертер может накладывать на структурное изображение, полученное в B-режиме, цвета, соответствующие движению в точках на поле изображения, в соответствии с их скоростями, определенными доплеровским способом, для формирования цветового доплеровского изображения, которое изображает движение ткани и потока крови в поле изображения. Модуль мультипланарной реформации будет конвертировать эхо, которое принято из точек на обычной плоскости в волюметрической области организма, в ультразвуковое изображение этой плоскости, как описано в патенте США 6,443,896 (Detmer). Визуализатор 42 объема конвертирует эхо-сигналы набора 3D-данных в перспективное 3D-изображение, как оно выглядит из определенной исходной точки, как описано в патенте США 6,530,885 (Entrekin et al.). 2D или 3D-изображения передаются от скан-конвертера 32, модуля 44 мультипланарной реформации и визуализатора 42 объема на процессор 30 изображений для дальнейшего усиления, буферизации и временного хранения для отображения на графическом дисплее 40. В дополнение к использованию для визуализации параметры потока крови, сформированные доплеровским процессором 28, и информация о структуре ткани, сформированная процессором 26 B-режима, передаются на процессор 34 количественного выражения. Процессор количественного выражения выдает величины различных состояний потока, такие как объемный расход потока крови, а также структурные измерения, такие как размеры органов и гестационный возраст. Процессор количественного выражения может принимать ввод от пользовательской панели 38 управления, такой как точка в анатомии изображения, в которой должны быть сделаны измерения. Выходные данные от процессора количественного выражения передаются на графический процессор 36 для воспроизведения графических данных и величин измерения с помощью изображения на дисплее 40. Графический процессор 36 также может формировать накладывающиеся графические элементы для отображения с акустическими изображениями. Данные накладывающиеся графические элементы могут содержать стандартную идентификационную информацию, такую как имя пациента, дата и время изображения, параметры визуализации и тому подобное. Для данных целей графический процессор принимает ввод от пользовательского интерфейса 38, такой как имя пациента. Пользовательский интерфейс также соединен с контроллером 18 передачи для управления формированием акустических сигналов от массива 10' преобразователей и, следовательно, изображений, формируемых массивом преобразователей и акустической системой. Пользовательский интерфейс также соединен с модулем 44 мультипланарной реформации для выбора и управления плоскостями множества изображений, сформированных посредством мультипланарной реформации (MPR), что можно использовать для осуществления количественных измерений в поле изображения MPR-изображений.
Устройство 300 акустической визуализации также включает в себя процессор 50 исключения помех, который может взаимодействовать с контроллером 18 преобразователей, формирователем 20 луча, сигнальным процессором 22 и процессором 30 изображений для использования избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве 10' акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий; и для формирования изображения области визуализации из компенсированных данных изображения. Примеры вариантов осуществления таких операций с помощью процессора 50 исключения помех будут ниже описаны более подробно.
Фиг. 4 представляет собой блок-схему, иллюстрирующую один вариант осуществления способа визуализации области визуализации, когда одно или более препятствий присутствуют между устройством визуализации и по меньшей мере частью области визуализации.
В операции 410 применяют массив акустических преобразователей для формирования данных изображения для области визуализации, когда одно или более препятствий присутствуют между массивом акустических преобразователей и по меньшей мере частью области визуализации.
В операции 420 используют избыточность в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий.
В операции 430 формируют изображение области визуализации из компенсированных данных изображения.
Избыточность особенно очевидна в поле в дальней зоне, где работает приближение Фраунгофера. В данном случае поле и распределение амплитуды в апертуре связаны простым преобразованием Фурье. Например, в поле в дальней зоне поле, формируемое одним элементом, будет представлять собой плоскую волну. Пусть ITx и IRx представляют собой индексы передающего и принимающего элементов. В поле в дальней зоне соответствующими полями будут exp(j.k.x(ITx)) (соотв. exp(j.k.x(IRx)), где k представляет собой номер волны, и x(ITx)) представляет собой физическую координату передающего элемента в массиве. Поле при прохождении в прямом и обратном направлении представляет собой произведение полей передачи и приема и выражается как exp(j.k.(x(ITx)+x(IRx))). Таким образом, все пар элементов с одинаковыми x(ITx)+x(IRx) будут давать одно и то же поле при прохождении в прямом и обратном направлении. Данные пары элементов называют избыточными.
Угловой спектр поля представляет собой его разложение по его боковым пространственным частотам. В данном случае термин «угловой спектр» используется по отношению к боковому пространственному спектру ФРТ. Он выражается как преобразование Фурье бокового профиля ФРТ. В поле в дальней зоне угловой спектр при прохождении в одном направлении (только передаче или приеме) пропорционален распределению амплитуды в апертуре в соответствии с приближением Фраунгофера, как рассмотрено выше. Если активная апертура представляет собой прямоугольник, то ФРТ при прохождении в одном направлении представляет собой функцию sinc. Функция рассеяния точки при прохождении в прямом и обратном направлении представляет собой функцию sinc2, и угловой спектр для ФРТ при прохождении в прямом и обратном направлении представляет собой функцию треугольника. Угловой спектр при прохождении в прямом и обратном направлении может быть вычислен как результат свертки распределений амплитуды в апертурах передачи и приема.
Фиг. 5 иллюстрирует примеры: (1) идеального углового спектра 510 (пунктирные линии) для прямоугольного массива акустических преобразователей, содержащей 200 элементов, по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий; и (2) углового спектра 520 (сплошные линии) для того же массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий.
На фиг. 5 можно видеть, что в случае, если препятствия (например, ребра 15) не больше, чем межреберные пространства, амплитуда для каждой частоты является ненулевой. Поэтому, истинный угловой спектр (и функция рассеяния точки) может быть восстановлен посредством добавления большего веса угловым частотам, которые меньше представлены вследствие присутствия препятствий (например, ребер 15). Вес для каждой частоты в угловом спектре представляет собой отношение идеальной амплитуды в отсутствие препятствий (значения спектра 510 на данной частоте) к фактической амплитуде (значению спектра 520 в данной точке), обусловленной присутствием препятствий. Совокупность этих весов или коэффициентов по всем угловым частотам массива акустических преобразователей называется в данном документе обратным фильтром.
Одним простым путем реализации способа является использование формирования синтезированной апертуры. Если положение(я) препятствия(ий) (например, ребер 15) известно, может быть вычислен угловой спектр 520 для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий (например, ребер 15), и веса или коэффициенты для каждой пары элементов передачи-приема могут быть сформированы как отношение углового спектра 520 и идеального углового спектра 510. В данном случае положение(я) или местоположение(я) препятствия(ий) может быть определено с помощью множества методов, включая, например использование алгоритма детектирования ребер, который может использовать изображение области 7 визуализации, формируемое с помощью устройства 300 акустической визуализации, вместе с алгоритмом распознавания признаков. Предварительная заявка на патент США 61/913,576, поданная 9 декабря 2013 года, раскрывает варианты осуществления алгоритмов детектирования ребер. Настоящим содержимое предварительной заявки на патент США 61/913,576 включено в настоящий документ путем ссылки. Можно использовать другие способы, включая использование данных изображения, полученных от других средств визуализации, включая рентгеновские данные, данные магнитно-резонансной томографии (МРТ) и так далее. Тем не менее, какой бы способ локализации положения(ий) препятствия(ий) (например, ребер 15) не применяли, если местоположение(я) определены, может быть вычислен угловой спектр 520 для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий (например, ребер 15), и могут быть получены веса или коэффициенты для каждой пары элементов передачи-приема как отношение углового спектра 520 и идеального углового спектра 510, как упоминалось выше. Во время моделирования синтезированной апертуры каждую пару элементов TX/RX взвешивали с помощью соответствующего весового коэффициента. Одним из недостатков этого способа может быть низкое отношение сигнал-шум (SNR) из-за использования передачи с помощью одного элемента.
Фиг. 6 представляет собой блок-схему, иллюстрирующую вариант осуществления способа 600 визуализации области визуализации, когда одно или более препятствий присутствуют (например, ребра 15) между устройством визуализации и по меньшей мере частью области визуализации. Следует понимать, что различные операции способа 600 могут быть выполнены в другом порядке, чем проиллюстрировано на фиг. 6 и описано ниже.
В операции 610 определяют идеальный угловой спектр для массива акустических преобразователей по отношению к области визуализации, который существовал бы в отсутствие препятствия(ий).
В операции 620 определяют угловой спектр для массива акустических преобразователей по отношению к области визуализации в присутствии препятствия(ий).
В операции 630 определяют обратный фильтр для массива акустических преобразователей.
В некоторых вариантах осуществления обратный фильтр может быть получен посредством деления идеального углового спектра для массива акустических преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий (например, 510 на фиг. 5), на угловой спектр для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий (например, 520 на фиг. 5), который может быть определен, как рассмотрено выше.
В операции 640 применяют массив акустических преобразователей для формирования данных изображения для области 7 визуализации.
В операции 650 сигнал, формируемый каждой парой элементов передачи-приема в массиве акустических преобразователей при операции визуализации, взвешивают по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема.
В операции 660 формируют изображение области визуализации из компенсированных данных изображения.
Приведенное выше описание упрощает воздействие препятствий, моделируя их, как если бы они были тонкими подобными экранам элементами, расположенными непосредственно перед массивом акустических преобразователей. В действительности препятствия (например, ребра 15) обычно являются толстыми и расположены на расстоянии от массива акустических преобразователей. Следовательно, «тень» от препятствий на апертуре будет изменяться в зависимости от положения точки визуализации. Таким образом, эффективная апертура Tx и Rx, а также угловой спектр изменяются для каждой точки в области визуализации. Однако, если определено местоположение(я) препятствия(ий), то для вычисления апертуры, «видимой» каждой точкой, можно использовать алгоритм трассировки лучей, может быть вычислен угловой спектр для каждой точки, и можно использовать алгоритм, описанный выше.
Соответственно, в некоторых вариантах осуществления способа 600, описанного выше, определение обратного фильтра для массива акустических преобразователей, взвешивание сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема, и формирование акустического изображения посредством суммирования взвешенных сигналов всех пар передачи-приема, могут включать осуществление алгоритма для каждой из множества интересующих точек в области визуализации. Данный алгоритм может включать в себя: определение обратного фильтра для массива акустических преобразователей по отношению к точке, причем, когда данный обратный фильтр умножают на угловой спектр для массива акустических преобразователей по отношению к точке в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива акустических преобразователей по отношению к точке который существовал бы в отсутствие одного или более препятствий; взвешивание сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, от точки по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема; и определение интенсивности акустического изображения в точке посредством суммирования взвешенных сигналов, формируемых каждой парой передачи-приема элементов в массиве акустических преобразователей, от точки.
В некоторых вариантах осуществления обратный фильтр для массива акустических преобразователей по отношению к каждой точке может быть определен посредством применения алгоритма трассировки лучей для вычисления эффективной апертуры, видимой данной точкой.
Фиг. 7 показывает модель ребра, иллюстрирующую, как можно использовать алгоритм трассировки лучей для детектирования того, какая точка изображения видит какой преобразовательный элемент в массиве преобразователей, в способе 600 с фиг. 6 в присутствии препятствий 15. В частности, фиг. 7 иллюстрирует первые области, 722 которые могут быть видимыми для конкретного элемента 702, и вторые области 724, видимость которых для элемента 702 заблокирована препятствиями 15.
Одним решением для нивелирования низкого SNR визуализации с помощью синтезированной апертуры, использованной в способе 600, с сохранением при этом ее гибкости является использование подхода виртуальных преобразователей. В таком подходе создают набор сфокусированных пар передачи и приема. Каждый сфокусированный луч может быть видим как виртуальный преобразователь (но с большей интенсивностью, чем один элемент), расположенный в фокусе луча, и может быть применен алгоритм синтезированной апертуры с массивом виртуальных преобразователей. Идеальной глубиной для виртуального преобразователя будет глубина препятствий (например, ребер 15).
Соответственно, в некоторых вариантах осуществления способа 600, описанного выше, определение обратного фильтра для массива акустических преобразователей, взвешивание сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема, и формирование акустического изображения посредством суммирования взвешенных сигналов всех пар передачи-приема, могут включать осуществление алгоритма, который использует виртуальные преобразователи. В некоторых вариантах осуществления данный алгоритм может включать в себя: создание массива виртуальных преобразователей из массива акустических преобразователей; определение обратного фильтра для массива виртуальных преобразователей, причем, когда данный обратный фильтр умножают на угловой спектр для массива виртуальных преобразователей по отношению к области визуализации в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива виртуальных преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий; взвешивание сигнала, формируемого каждой парой элементов передачи-приема в массиве виртуальных преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема, и формирование акустического изображения посредством суммирования взвешенных сигналов всех пар передачи-приема.
Другие варианты осуществления могут использовать избыточность в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей непосредственно в пространстве луча. Такие варианты осуществления могут использовать обычное формирование луча, которое может повышать SNR по сравнению с вариантом осуществления с фиг. 6, поскольку энергия от нескольких точек в пространстве может быть сфокусирована в одном местоположении. В данных вариантах осуществления используют сфокусированную передачу вместо передачи с помощью одного элемента. С этой целью вычисляемые веса при прохождении в прямом и обратном направлении должны быть разделены на веса для апертуры передачи и веса для апертуры приема. Это может быть сделано с использованием алгоритма разложения, такого как сингулярное разложение, разложение по собственным значениям или другое разложение. Тем не менее, желаемая функция рассеяния точки при прохождении в прямом и обратном направлении не может быть получена с помощью одной операции передачи-приема, для нее требуется сумма двух или более операций передачи-приема (например, вторая функция рассеяния точки передачи-приема может фактически содержать только боковой лепесток и может вычитаться из первой, которая содержит как основной лепесток, так и боковые лепестки).
Например, пусть W представляет собой матрицу весов при прохождении в прямом и обратном направлении. Например, Wi,j представляет собой вес, соответствующий паре, состоящей из передачи i и приема j, получаемый по значению углового спектра для соответствующей пары Tx/Rx.
Пусть U (соотв. V) представляет собой вектор аподизации при передаче (соотв. приеме) (каждый элемент U представляет собой вес для применения к элементу в массиве при передаче). Для определенных U и V получают W как W=UV*, где * обозначает транспонирование матрицы.
В данном документе автором интересует обратная задача: W известна, но всегда ли можно найти набор соответствующих апертур передачи и приема? Если ранг W составляет 1, то W может быть разложена на произведение 1 апертуры передачи и 1 приема. Однако, если ранг W больше чем 1, как в случае алгоритма компенсации промежутков, W можно разложить только на сумму произведения нескольких апертур передачи и приема с помощью сингулярного разложения (SVD):
W=USV*, где S представляет собой диагональную матрицу сингулярных значений, и U (соотв. V) представляет собой матрицу, столбцами которой являются различные векторы аподизации передачи (соотв. приема).
На практике было установлено, что только 2 сингулярных значения являются значимыми (остальные очень малы), так что W может в очень хорошем приближении быть выражена в виде суммы двух лучей передачи-приема
(1) W= S(1,1).U1.V1+S(2,2).U2.V2
Благодаря симметрии W аподизации передачи и приема идентичны: U1 =V1.
Фиг. 8 иллюстрирует аподизации 810 (U1) и 820 (U2) для моделированной апертуры, описанной выше в связи с фиг. 2. Обе аподизации 810 и 820 имеют большие веса вблизи краев субапертур. Одна лишь аподизация 810 продолжает формировать сильные боковые лепестки. Однако, когда функции рассеяния точки, сформированные с использованием каждой из аподизаций 810 и 820 по отдельности, объединяют в соответствии с уравнением (1) выше, дифракционные лепестки исчезают из итоговой функции рассеяния точки. Фактически, аподизация 820 формирует функцию рассеяния точки без основного лепестка и только с дифракционными лепестками, которые могут быть вычтены из первой функции рассеяния точки, сформированной с использованием аподизации 810.
В некоторых вариантах осуществления первую аподизацию 810 (U1) можно использовать в операциях как передачи, так и приема для формирования первого набора данных изображения. Аналогичным образом, второй набор данных изображения формируют с использованием второй аподизации 820 (U2) для операций передачи и приема. Два набора суммарных данных затем взвешивают по их соответствующим сингулярным значениям, как показано в уравнении 1, и объединяют для получения итоговых данных изображения.
Фиг. 9 представляет собой блок-схему, иллюстрирующую вариант осуществления способа 900 визуализации области визуализации, когда одно или более препятствий (например, ребер 15) присутствуют между устройством визуализации и по меньшей мере частью области визуализации, который может использовать обычное формирование луча. Следует понимать, что различные операции способа 900 могут быть выполнены в другом порядке, чем проиллюстрировано на фиг. 9 и описано ниже.
В операции 910 первую и вторую функции аподизации определяют из обратного фильтра для массива акустических преобразователей по отношению к области визуализации.
Фиг. 8 иллюстрирует пример первой и второй функций аподизации 810 и 820 для двух наборов апертур передачи-приема, которые могут быть использованы в способе 900 с фиг. 9.
В операции 920 к массиве акустических преобразователей применяют первую функцию аподизации.
В операции 930 выполняют первую операцию передачи и приема с первой аподизацией для формирования первых данных изображения.
В операции 940 к массиве акустических преобразователей применяют вторую функцию аподизации.
В операции 950 выполняют вторую операцию передачи и приема со второй аподизацией для формирования вторых данных изображения.
В операции 960 формируют изображение области визуализации посредством объединения первых данных изображения и вторых данных изображения.
Другие варианты осуществления способов, которые используют избыточность в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей, могут использовать основанную на изображении обратную свертку. Как упоминалось выше, в поле в дальней зоне преобразование Фурье функции рассеяния точки при определенной частоте пропорционально апертуре. Для широкополосных сигналов можно применять пространственное 2D преобразование Фурье функции рассеяния точки, известное как k-пространство. Спектр при определенном волновом числе k представляет собой пересчитанный вариант углового спектра при прохождении в прямом и обратном направлении, полученного как описано выше. Коэффициентом пересчета является само волновое число k. Это может быть получено из приближения Фраунгофера: как видно выше, один элемент апертуры связан с плоской волной exp(j.k.x(ITx)). Пространственная частота пропорциональна k.
Поэтому обратный фильтр может быть реализован непосредственно в k-пространстве, а не на парах при прохождении синтезированной апертуры в прямом и обратном направлении.
В некоторых вариантах осуществления k-пространство изображения вычисляют посредством применения 2D преобразования Фурье суммарных РЧ-данных (до детектирования огибающей). Веса обратного фильтра вычисляют, как описано выше, пересчитывают для каждого значения k и перемножают со спектром. В данной точке можно учесть временную ширину полосы сигнала. Наконец, вычисляют обратное 2D преобразование Фурье для получения компенсированного изображения. В качестве альтернативы, поскольку умножение в k-пространстве эквивалентно свертке в пространстве изображений, можно непосредственно выполнять обратную свертку в пространстве изображений. В данном случае 2D преобразование Фурье обратного фильтра вычисляют для получения ядра, которое сворачивают с изображением (суммарными РЧ-данными). Размер ядра представляет собой примерно размер функции рассеяния точки.
Было замечено, что предположения, лежащие в основе использования основанной на изображении обратной свертки, не настолько устойчивы к ошибкам, насколько предположения, лежащие в основе использования алгоритма синтезированной апертуры, как описано выше. Даже в поле в дальней зоне спектр в k-пространстве значительно изменяется в зависимости от бокового положения точки. Тем не менее, эту проблему можно решить посредством применения зависимого от пространства обратного фильтра. Веса фильтра могут быть вычислены посредством моделирования функций рассеяния точки. Подход с ядром свертки особенно подходит для зависимой от пространства фильтрации, поскольку ядро может изменяться в зависимости от положения.
Фиг. 10 иллюстрирует функцию рассеяния точки для такой же ситуации, как проиллюстрированная на фиг. 2, когда применяют алгоритм компенсации, как описано в связи с фиг. 6, для межреберных пространств. В данном случае четыре точечных рассеивателя снова расположены на глубине, составляющей 4, 8, 12 и 16 см соответственно. Для двух наиболее глубоких точек на 12 см и 16 см изображение значительно улучшено по сравнению с фиг. 2. Дифракционные лепестки подавляются, и функции рассеяния точки выглядят аналогично тем, которые могли бы быть получены с полной апертурой без каких-либо промежутков. Для самой неглубокой точки на 4 см приближение для дальней зоны не работает, и реконструкция не удачна. Точка на 8 см находится в переходной области.
Фиг. 11A и 11B иллюстрируют изображения, которые моделируют присутствие межреберных промежутков в большой апертуре с компенсацией (фиг. 11B) и без нее (фиг. 11A). В частности, использовали одну 80-элементную апертуру и искусственно вводили «миниребра» посредством блокировки некоторых из элементов. Использовали две 13-элементные преграды, оставляя три 18-элементные апертуры. Следует отметить, что фиг. 11A показывает сильные дифракционные лепестки, тогда как фиг. 11B показывает уменьшение и в некоторых случаях исчезновение дифракционных лепестков благодаря применению алгоритма компенсации промежутков, как описано в настоящем документе.
Фиг. 12A-D иллюстрируют моделированные трансторакальные эхокардиограммы, сформированные с использованием большой апертуры при моделировании двух преград (например, из-за двух ребер 15). Как и на фиг. 11A-B, одну 80-элементную апертуру разделяли на три 18-элементные апертуры, разделенные двумя 13-элементными преградами.
Фиг. 12A иллюстрирует моделированную трансторакальную эхокардиограмму, сформированную с использованием большой апертуры при моделировании двух преград (например, из-за двух ребер).
Фиг. 12B иллюстрирует трансторакальную эхокардиограмму, сформированную с использованием большой апертуры при моделировании двух преград (например, из-за двух ребер) и применении алгоритма компенсации межреберных промежутков.
Фиг. 12C иллюстрирует эталонную трансторакальную эхокардиограмму, сформированную с использованием большой апертуры, как и на фиг 12A, но когда преград нет.
Фиг. 12D иллюстрирует трансторакальную эхокардиограмму, сформированную с использованием меньшей апертуры, чем использованная для создания фиг. 12A-C.
Фиг. 13 иллюстрирует когерентное изображение, сформированное в присутствии препятствий (например, 15). Как и на фиг. 2 и 10, четыре точечных рассеивателя расположены на глубине, составляющей 4, 8, 12 и 16 см соответственно. Дифракционные лепестки 1304 показаны рядом с основными лепестками 1302.
Фиг. 14A иллюстрирует изображение, сформированное в присутствии ребер, аналогичное показанному на фиг. 13, при применении когерентного объединения с использованием алгоритма «компенсации межреберных промежутков», как описано выше. Фиг. 14B иллюстрирует изображение, аналогичное показанному на фиг. 13 и 14A, которое было бы сформировано при отсутствии каких бы то ни было препятствий. При сравнении фиг. 13, 14A и 14B можно видеть, что для глубины больше чем 10 см изображение через препятствия (например, ребра), когда применяют алгоритм компенсации, почти также хорошо, как когда препятствий не было.
Фиг. 15A иллюстрирует угловой спектр для точки в центре поля в дальней зоне в модели, проиллюстрированной на фиг. 8. Фиг. 15B иллюстрирует угловой спектр для точки ближе к массиве акустических преобразователей и на краю изображения в модели, проиллюстрированной на фиг. 8. Как показано на фиг. 15B, угловой спектр имеет промежутки 1505, которые не могут быть закрыты с помощью алгоритмов, описанных выше, которые используют избыточность в трактах TX/RX при прохождении в прямом и обратном направлении, поскольку минимальная амплитуда равна нулю или очень мала. Алгоритм когерентного объединения по прежнему можно использовать для части 1510 спектра, показанной стрелкой. Другую часть спектра можно добавлять некогерентно.
Фиг. 16 иллюстрирует для примера с фиг. 8 максимальный размер апертуры при прохождении в прямом и обратном направлении, который может быть реконструирован с помощью алгоритма для различных точек изображения. Препятствия расположены вдоль левого края.
Фиг. 17 иллюстрирует результаты алгоритма компенсации, когда препятствия (например, ребра) так же велики, как и межреберные пространства. В данном случае используют только одно межреберное пространство для каждой точки, поскольку промежутки не могут быть закрыты. Можно использовать некогерентное объединение для улучшения результатов.
При том, что в настоящем документе подробно раскрыты предпочтительные варианты осуществления, возможно множество изменений, которые остаются в пределах концепции и объема настоящего изобретения. Такие изменения станут понятны среднему специалисту в данной области техники после изучения описания изобретения, чертежей и формулы изобретения в настоящем документе. Настоящее изобретение, следовательно, не ограничено ничем, кроме объема приложенной формулы изобретения.










Устройство и способ визуализации области (7) визуализации используют массив (10') акустических преобразователей для формирования данных изображения для области (7) визуализации, причем между массивом (10') акустических преобразователей и по меньшей мере частью (5) области (7) визуализации присутствуют одно или более препятствий (15-1, 15-2, 15-3). Один или более процессоров используют избыточность в трактах пар передачи-приема среди акустических преобразователей в массиве (10') акустических преобразователей для компенсации недостающих данных изображения области (7) визуализации из-за одного или более препятствий (15-1, 15-2, 15-3) и формирования изображения области (7) визуализации из компенсированных данных изображения. 2 н. и 13 з.п. ф-лы, 23 ил.
1. Способ (600,900) визуализации области (7) визуализации, причем способ содержит этапы, на которых:
применяют массив (640) акустических преобразователей для формирования данных изображения для области визуализации, причем между массивом акустических преобразователей и по меньшей мере частью области визуализации присутствуют одно или более препятствий (15);
используют избыточность в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации (650) недостающих данных изображения области визуализации из-за одного или более препятствий посредством
(i) определения обратного фильтра (610-630) для массива акустических преобразователей, причем, когда данный обратный фильтр умножают на угловой спектр для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива акустических преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий;
(ii) взвешивания (650) сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема; и
формируют (660) изображение области визуализации из компенсированных данных изображения посредством суммирования взвешенных сигналов всех пар передачи-приема.
2. Способ по п. 1, в котором применение массива акустических преобразователей для формирования данных изображения для области визуализации содержит этап, на котором осуществляют получение синтезированной апертуры.
3. Способ по п. 1, в котором определение обратного фильтра для массива акустических преобразователей, взвешивание сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема, и формирование акустического изображения посредством суммирования взвешенных сигналов всех пар передачи-приема содержат этапы, на которых:
для каждой из множества интересующих точек в области визуализации:
определяют обратный фильтр для массива акустических преобразователей по отношению к данной точке, причем, когда данный обратный фильтр умножают на угловой спектр для массива акустических преобразователей по отношению к данной точке в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива акустических преобразователей по отношению к данной точке, который существовал бы в отсутствие одного или более препятствий;
взвешивают сигнал, формируемый каждой парой элементов передачи-приема в массиве акустических преобразователей, от данной точки по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема; и
определяют интенсивность акустического изображения в данной точке посредством суммирования взвешенных сигналов, формируемых каждой парой передачи-приема элементов в массиве акустических преобразователей, от данной точки.
4. Способ по п. 3, в котором определение обратного фильтра для массива акустических преобразователей по отношению к точке включает в себя этап, на котором применяют алгоритм трассировки лучей для вычисления эффективной апертуры, видимой данной точкой.
5. Способ по п. 1, в котором использование избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей, для того чтобы компенсировать недостающие данные изображения области визуализации из-за одного или более препятствий, и формирование изображения области визуализации из компенсированных данных изображения содержат этапы, на которых:
осуществляют по меньшей мере первую и вторую операции передачи и приема с использованием по меньшей мере первой и второй функций аподизации, включающие в себя этапы, на которых:
осуществляют (920-930) первую операцию передачи и приема посредством применения массива акустических преобразователей для передачи первой акустической волны в область визуализации, и для приема обратно из области визуализации первого акустического эха, и для формирования из него первых данных изображения, причем к массиву акустических преобразователей применяют первую функцию аподизации для формирования первой апертуры передачи и первой апертуры приема для первой операции передачи и приема, и
осуществляют (940-950) вторую операцию передачи и приема посредством применения массива акустических преобразователей для передачи второй акустической волны в область визуализации, и для приема обратно из области визуализации второго акустического эха, и для формирования из него вторых данных изображения, причем к массиву акустических преобразователей применяют вторую функцию аподизации для формирования второй апертуры передачи и второй апертуры приема для второй операции передачи и приема; и
формируют (960) изображение области визуализации посредством объединения первых данных изображения со вторыми данными изображения,
причем по меньшей мере первую и вторую функции аподизации определяют (910) из обратного фильтра для массива акустических преобразователей по отношению к области визуализации.
6. Способ по п. 5, в котором по меньшей мере первую и вторую функции аподизации определяют из обратного фильтра для массива акустических преобразователей по отношению к области визуализации посредством применения алгоритма разложения.
7. Способ по п. 1, в котором использование избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирование изображения области визуализации из компенсированных данных изображения содержат этап, на котором выполняют основанный на РЧ-данных (до детектирования) или основанный на изображении алгоритм обратной свертки.
8. Устройство (300) для визуализации области (7) визуализации, причем устройство содержит:
массив (10') акустических преобразователей, выполненный с возможностью формирования данных изображения для области визуализации, причем между массивом акустических преобразователей и по меньшей мере частью области визуализации присутствуют одно или более препятствий (15); и
один или более процессоров (50), выполненных с возможностью использования избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий посредством:
(i) определения обратного фильтра для массива акустических преобразователей, причем, когда данный обратный фильтр умножают на угловой спектр для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива акустических преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий;
(ii) взвешивания сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема; и
причем процессоры дополнительно выполнены с возможностью формирования изображения области визуализации из компенсированных данных изображения посредством суммирования взвешенных сигналов всех пар передачи-приема.
9. Устройство по п. 8, в котором один или более процессоров дополнительно выполнены с возможностью:
определения одного или более местоположений одного или более препятствий по отношению к массиву акустических преобразователей; и
определения углового спектра для массива акустических преобразователей по отношению к области визуализации в присутствии одного или более препятствий с использованием определенных одного или более местоположений.
10. Устройство по п. 9, причем устройство выполнено с возможностью формирования данных изображения посредством осуществления получения синтезированной апертуры.
11. Устройство по п. 8, в котором один или более процессоров выполнены с возможностью определения обратного фильтра для массива акустических преобразователей, взвешивания сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема, и формирования акустического изображения посредством суммирования взвешенных сигналов всех пар передачи-приема посредством:
для каждой из множества интересующих точек в области визуализации:
определения обратного фильтра для массива акустических преобразователей по отношению к данной точке, причем, когда данный обратный фильтр умножают на угловой спектр для массива акустических преобразователей по отношению к данной точке в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива акустических преобразователей по отношению к данной точке, который существовал бы в отсутствие одного или более препятствий;
взвешивания сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, от данной точки по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема;
определения интенсивности акустического изображения в данной точке посредством суммирования взвешенных сигналов, формируемых каждой парой передачи-приема элементов в массиве акустических преобразователей, от данной точки; и причем один или более процессоров выполнены с возможностью определения обратного фильтра для массива акустических преобразователей по отношению к точке посредством применения алгоритма трассировки лучей для вычисления эффективной апертуры, видимой данной точкой.
12. Устройство по п. 8, в котором один или более процессоров выполнены с возможностью определения обратного фильтра для массива акустических преобразователей, взвешивания сигнала, формируемого каждой парой элементов передачи-приема в массиве акустических преобразователей, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема, и формирования акустического изображения посредством суммирования взвешенных сигналов всех пар передачи-приема посредством:
создания массива виртуальных преобразователей из массива акустических преобразователей;
определения обратного фильтра для массива виртуальных преобразователей, причем, когда данный обратный фильтр умножают на угловой спектр для массива виртуальных преобразователей по отношению к области визуализации в присутствии одного или более препятствий, он обеспечивает идеальный угловой спектр для массива виртуальных преобразователей по отношению к области визуализации, который существовал бы в отсутствие одного или более препятствий;
взвешивания сигнала, формируемого каждой парой элементов передачи-приема в массиве виртуальных преобразователей из эха, по значению обратного фильтра, соответствующему угловой частоте пары передачи-приема, и
формирования акустического изображения посредством суммирования взвешенных сигналов всех пар передачи-приема из эха.
13. Устройство по п. 8, в котором один или более процессоров выполнены с возможностью использования избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирования изображения области визуализации из компенсированных данных изображения посредством:
осуществления по меньшей мере первой и второй операций передачи и приема с использованием по меньшей мере первой и второй функций аподизации, включающих в себя:
осуществление первой операции передачи и приема посредством применения массива акустических преобразователей для передачи первой акустической волны в область визуализации, и для приема обратно из области визуализации первого акустического эха, и для формирования из него первых данных изображения, причем к массиву акустических преобразователей применяют первую функцию аподизации для формирования первой апертуры передачи и первой апертуры приема для первой операции передачи и приема, и
осуществление второй операции передачи и приема посредством применения массива акустических преобразователей для передачи второй акустической волны в область визуализации, и для приема обратно из области визуализации второго акустического эха, и для формирования из него вторых данных изображения, причем к массиву акустических преобразователей применяют вторую функцию аподизации для формирования второй апертуры передачи и второй апертуры приема для второй операции передачи и приема; и
формирования изображения области визуализации посредством объединения первых данных изображения со вторыми данными изображения,
причем по меньшей мере первую и вторую функции аподизации определяют из обратного фильтра для массива акустических преобразователей по отношению к области визуализации.
14. Устройство по п. 13, в котором один или более процессоров выполнены с возможностью определения по меньшей мере первой и второй функций аподизации из обратного фильтра для массива акустических преобразователей по отношению к области визуализации посредством применения алгоритма разложения.
15. Устройство по п. 8, в котором один или более процессоров выполнены с возможностью использования избыточности в трактах пар передачи-приема среди акустических преобразователей в массиве акустических преобразователей для компенсации недостающих данных изображения области визуализации из-за одного или более препятствий и формирования изображения области визуализации из компенсированных данных изображения посредством выполнения основанного на РЧ-данных (до детектирования) или основанного на изображении алгоритма обратной свертки.
| US 20120095343 A1, 19.04.2012 | |||
| US 5278757 A1, 11.01.1994 | |||
| US 20060074313 A1, 06.04.2006 | |||
| US 6755787 B2, 29.06.2004 | |||
| US 5640959 A1, 24.06.1997 | |||
| FR 2862763 B1, 15.12.2006. |

