Изобретение относится к области медицины, в частности - к ультразвуковой диагностике, и может использоваться в диагностических устройствах с фазированной решеткой при обработке сигналов в вычислительной системе акустической визуализации для оценки качества фокусировки изображения. Способ обнаружения искажений основан на оценке ширины луча; если луч достаточно узок - искажения отсутствуют.
Из уровня техники известен способ оценки наличия аберраций при ультразвуковой визуализации [1]. При реализации данного способа требуется в область интереса ввести гидрофон, который бы являлся точечным источником. Сигнал от гидрофона принимается приложенным к исследуемому объекту с другой стороны фазированным датчиком, принятый фронт сравнивается со сферическим, рассчитывались задержки и затухание и делался вывод о качестве фокусировки. Недостатком этого способа является инвазивность и необходимость использование точечного источника.
В другом способе [2] используются как минимум два ультразвуковых датчика, расположенных соосно так, что излучение от одного проходит сквозь исследуемый объект и приходит на другой. Сигнал принимается всеми элементами датчика, оценивается фазовый фронт и сравнивается с излученным. По присутствующим отклонениям делают вывод и наличии аберраций. Недостатком этого способа является необходимость использовать как минимум два ультразвуковых датчика.
Способ [2] является наиболее близким известным аналогом заявляемого изобретения и принят в качестве прототипа заявленного способа.
Технической задачей заявляемого изобретения является оценка наличия аберраций ультразвукового изображения.
Технический результат изобретения состоит в упрощении реализации способа обнаружения аберраций при ультразвуковом исследовании за счет использования лишь одного ультразвукового датчика.
Основа процесса получения данных заключается в том, что ультразвуковой преобразователь прикладывают к исследуемому объекту, для улучшения контакта промежуточное пространство между датчиком и поверхностью объекта заполняют специальным гелем. Затем ультразвуковой преобразователь в режиме синтезированной апертуры излучает и принимает сигналы, сигналы проходят предварительную обработку в тракте ультразвукового прибора.
Существенным признаком заявляемого технического решения, отличающим его от прототипа, является выполнение следующих шагов: из прошедших предварительную обработку сигналов строят изображение, для чего выполняется формирование луча. Для выявления наличия аберраций необходимо задать угловую координату, в которой находится область, для которой будет осуществляться оценка искажений. При формировании луча на передачу луч фиксируют на заданной угловой координате, а при формировании луча на прием выбирают любое направление в области интереса, не обязательно совпадающее с углом передатчика. Повторяют формирование луча на прием, меняя угол наклона луча, и таким образом сканируют всю область зондирования. Если аберрации отсутствуют, то при такой процедуре будет получено изображение, в котором наиболее яркая область соответствует заданной угловой координате, в которой находится область, для которой осуществляется оценка искажений. Наличие аберраций даст расширение углового распределения изображения.
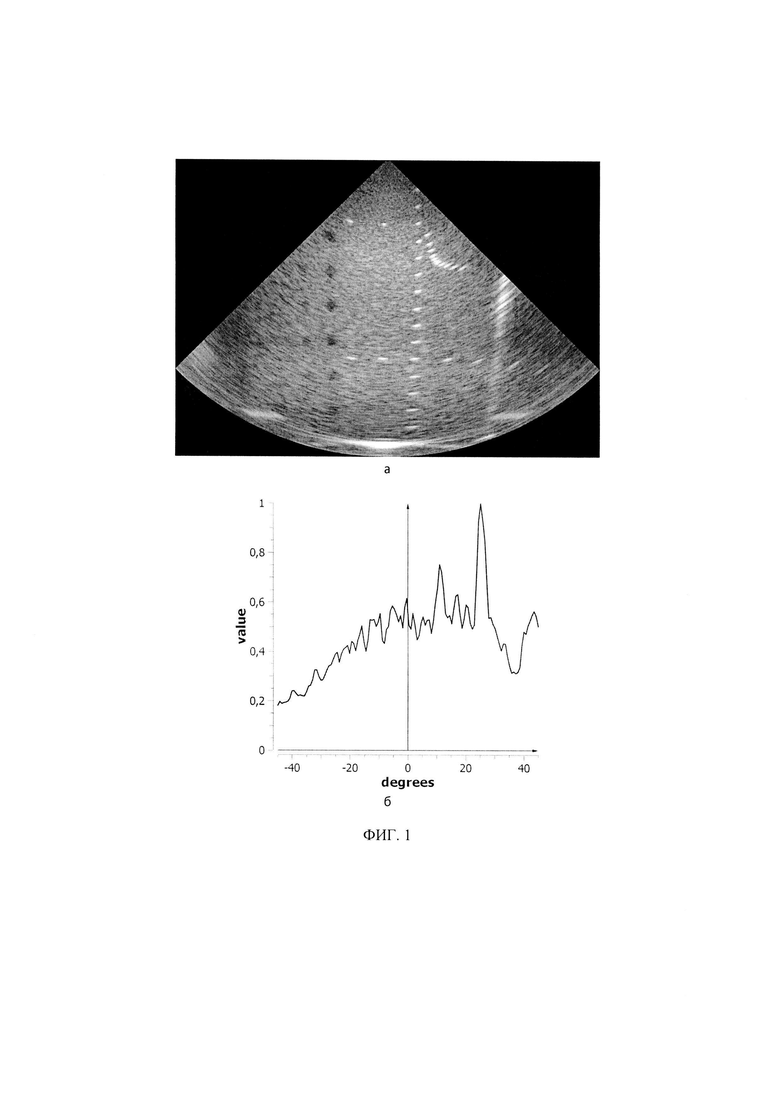
На Фиг. 1а приведен пример сонограммы, полученной при использовании традиционной схемы сканирования при отсутствии искажающего слоя между датчиком и исследуемым объектом.
На Фиг. 1б приведен пример углового распределения интенсивностей эхо-сигналов, полученного при использовании традиционной схемы сканирования при отсутствии искажающего слоя между датчиком и исследуемым объектом.
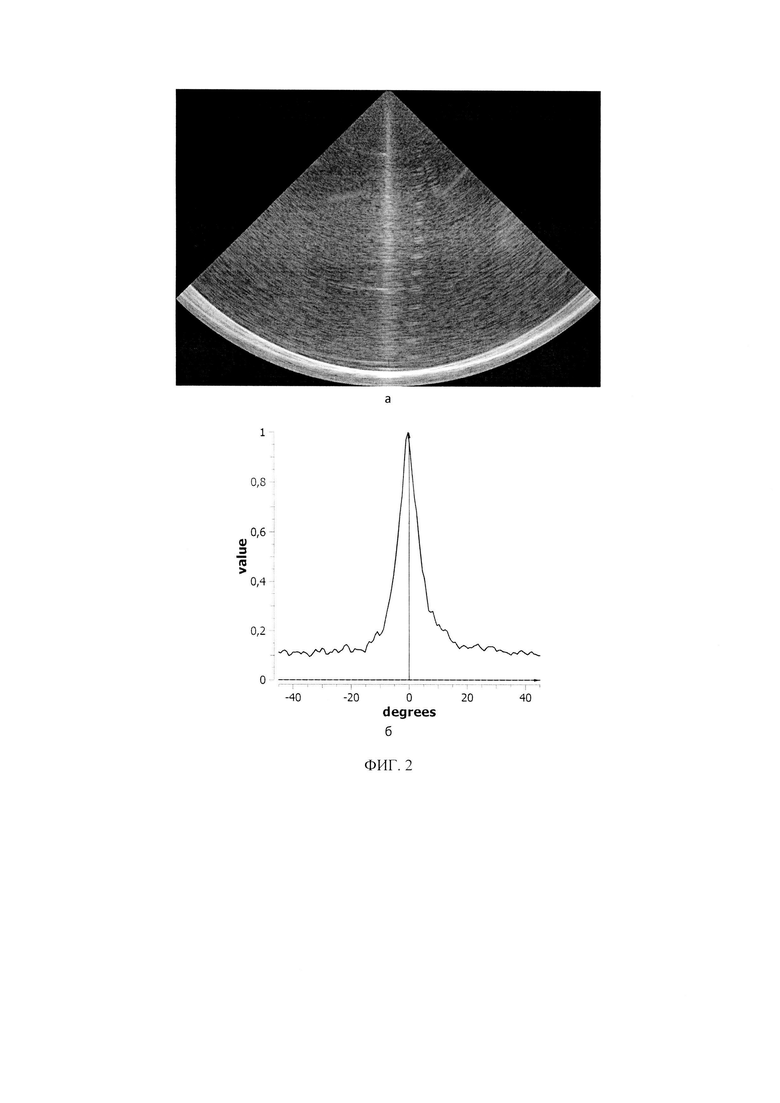
На Фиг. 2а приведен пример сонограммы, полученной при использовании предлагаемой схемы сканирования при отсутствии искажающего слоя между датчиком и исследуемым объектом.
На Фиг. 2б приведен пример углового распределения интенсивностей эхо-сигналов, полученного при использовании предлагаемой схемы сканирования при отсутствии искажающего слоя между датчиком и исследуемым объектом.
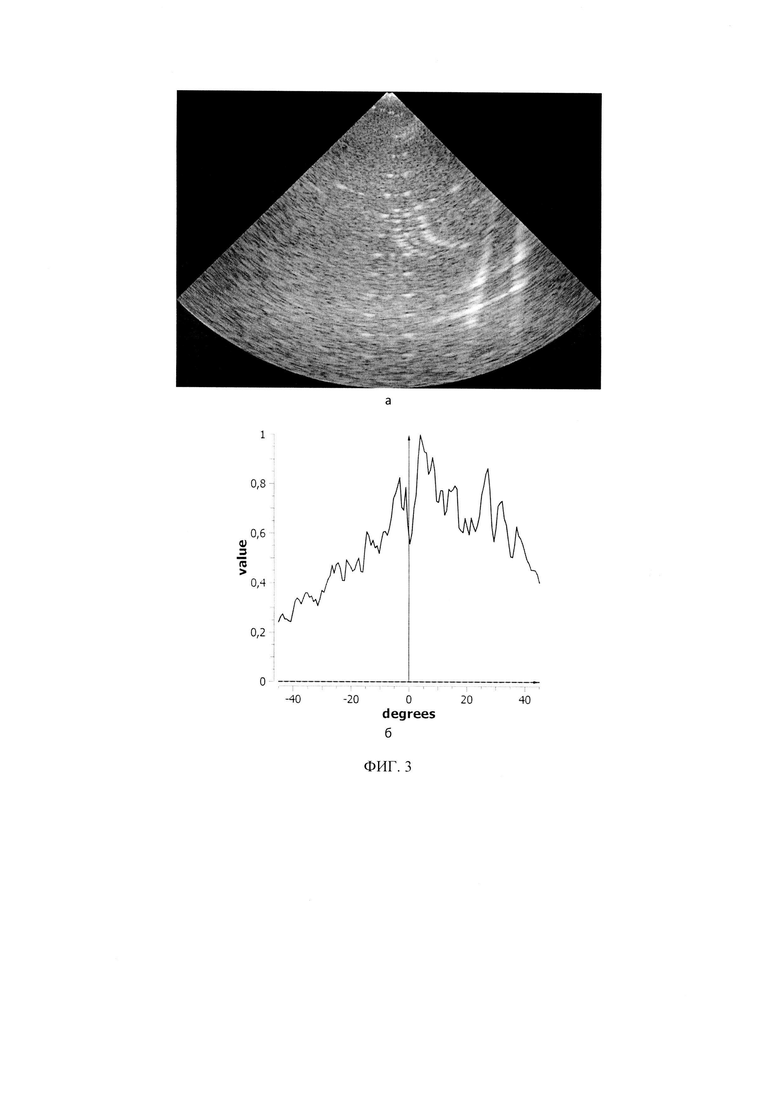
На Фиг. 3а приведен пример сонограммы, полученной при использовании традиционной схемы сканирования при наличии искажающего слоя между датчиком и исследуемым объектом.
На Фиг. 3б приведен пример углового распределения интенсивностей эхо-сигналов, полученного при использовании традиционной схемы сканирования при наличии искажающего слоя между датчиком и исследуемым объектом.
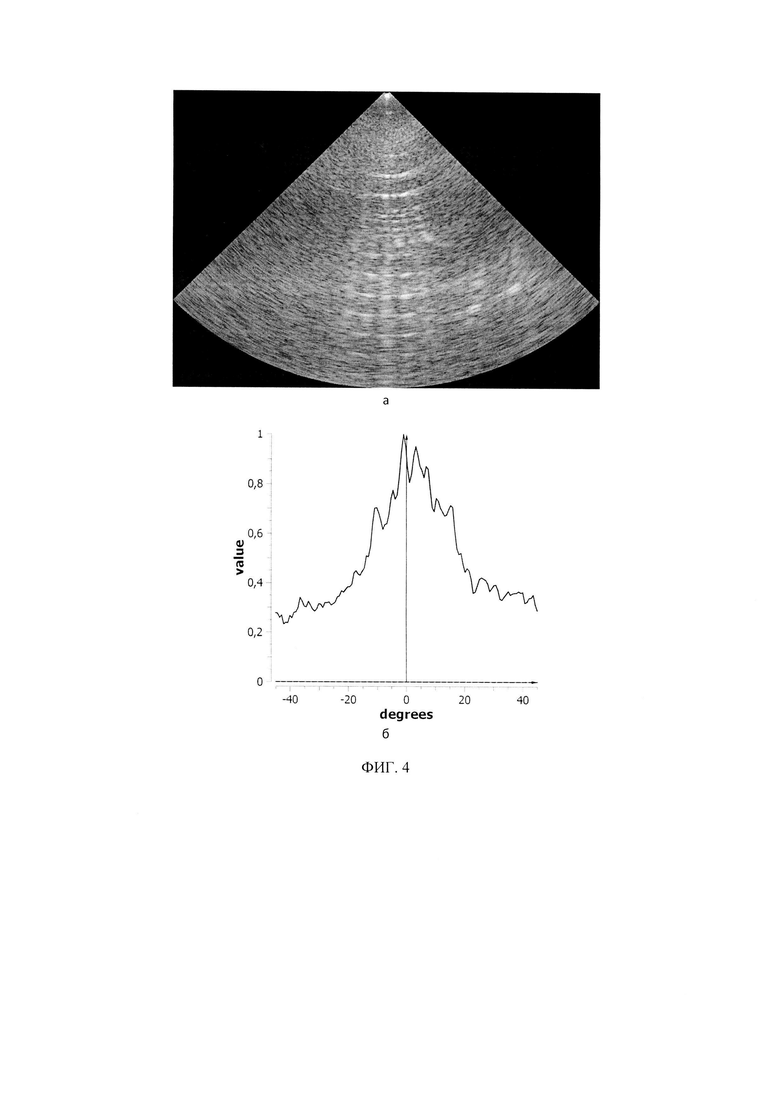
На Фиг. 4а приведен пример сонограммы, полученной при использовании предлагаемой схемы сканирования при наличии искажающего слоя между датчиком и исследуемым объектом.
На Фиг. 4б приведен пример углового распределения интенсивностей эхо-сигналов, полученного при использовании предлагаемой схемы сканирования при наличии искажающего слоя между датчиком и исследуемым объектом.
Для достижения заявленного технического результата предложено использовать разработанный способ оценки аберраций при транскраниальной ультразвуковой диагностике. Согласно разработанному способу ультразвуковую фазированную решетку прикладывают к одному из естественных окон прозрачности, где черепная кость является наиболее тонкой и гладкой; для улучшения контакта пространство между головой и решеткой заполняют водой или специальным гелем; проводят формирование и преобразование электрических импульсов в зондирующие сигналы; выполняют поэлементное сканирование зондирующими сигналами исследуемого объекта в режиме синтезированной апертуры посредством приемо-передающей ультразвуковой фазированной решетки; отраженные ультразвуковые сигналы принимают фазированной решеткой по каждому каналу раздельно, усиливают, оцифровывают, выполняют формирование квадратуры, например, через преобразование Гильберта, и получившийся набор комплексных значений записывают в память. Затем делят каждое комплексное значение на модуль комплексного числа для того, чтобы исключить влияние ярких рассеивателей на результат оценки качества фокусировки. После чего задают угловую координату для выполнения оценки; задают интервал по глубине, для которого надо выполнить оценку; рассчитывают задержки прихода сигнала от каждой точки исследуемой области с учетом сферического фронта ультразвуковой волны.
Рассчитанные задержки используют при выполнении фокусировка на передачу для выбранного угла и интервала по глубине, причем динамической фокусировка является только по глубине; выполняют динамическую фокусировку на прием для всего диапазона углов и выбранного интервала по глубине. Термин «динамическая фокусировка» подразумевает, что выполняется фокусировка в каждую точку. После фокусировки получают изображение размером MxN, где М - это число лучей, а N - это число отсчетов по глубине. Эта изображение отличается от обычного ультразвукового изображения, так как было получено при фиксации угла зондирования. Примеры таких изображений в привычном для врача ультразвуковой диагностике сканконвертированном виде представлены на Фиг. 1а, 2а, 3а и 4а для традиционной и предлагаемой схем сканирования, причем на Фиг. 1а и 2а представлен случай без аберратора, а на Фиг. 3а и 4а показан случай с аберратором. Затем из полученной матрицы извлекают и сохраняют в память первую строку, представляющую собой дискретную функцию из М элементов. Эту строку будем называть вектор-строкой, ее сохраняют в память. Из полученного изображения извлекают следующую строку и поэлементно прибавляют к полученной на предыдущем шаге вектор-строке. Операцию извлечения строки и поэлементное прибавление к вектор-строке повторяют для каждой следующей строки N-2 раза. Такое накопление необходимо для борьбы с шумами. Результатом является дискретная функция из М элементов. Для этой дискретной функции выполняют аподизацию путем свертки с оконной функцией. В качестве оконной функции может быть использована, например, окно Гаусса или Кайзера. Затем результат нормируют делением на N. Если аберраций нет или они достаточно малы, то результат будет похож на график, представленный на Фиг. 2б, т.е. будет существовать ярко выраженный максимум при угле, соответствующем заранее выбранному углу зондирования. Можно сравнить Фиг. 2б и Фиг. 4б, поскольку данные для Фиг. 2 были получены без аберратора, а данные для Фиг. 4 были получены с аберратором. Видно расширение лепестка на нулевом угле. Для традиционной схемы функция будет выглядеть иначе, такая функция показана на Фиг. 1б, главный лепесток в ней не выделен и расширение его не возникает при наличии аберраций, как это видно на Фиг. 3б.
Затем для полученной вектор-строки рассчитывается количественный критерий наличия аберраций, роль которого выполняет среднеквадратичная ширина углового распределения интенсивности сигнала, определяемая по формуле:
где ϕ - угол, определяющий наклон зондирующего луча, А(ϕ) - распределение интенсивности, ϕ0 - позиция пика интенсивности, поскольку фокусировка на передачу выполняется для нулевого угла, то ϕ0=0°, а и b пределы интегрирования, определяемые спадом интенсивности, в нашем случае интегрирование выполнялось в пределах от -15° до 15°.
Записывают в память полученное значение среднеквадратичной ширины. Согласно одному из вариантов осуществления изобретения для оценки наличия аберраций необходимо эталонное исследование с параметром α, рассчитанным для которого, будет выполняться сравнение текущего параметра α. При этом для проведения эталонного исследования в качестве исследуемого объекта берут фантом, в котором заведомо отсутствуют аберрации и повторяют предыдущие шаги вплоть до расчета параметра α. Полученное значение среднеквадратичной ширины углового распределения интенсивности сигнала сравнивают с записанным в памяти значением, полученным для не эталонного исследования. В случае если записанное в память значение а больше полученного для эталонного исследования, считают, что аберрации есть.
Для графика на Фиг. 2б, полученного экспериментально по данным без аберратора, значение параметра а равно 6°. Для графика на Фиг. 4б, полученного экспериментально по данным с аберратором, значение параметра α равно 8°.
Также в отсутствии эталонных данных сравнение можно выполнять с теоретическим значением количественного критерия наличия аберраций. Тогда выполняют следующие действия:
1) полученную после аподизации вектор-строку, именуемую также дискретной функцией из М элементов, записывают в память;
2) упорядочивают значения полученной вектор-строки по возрастанию;
3) упорядоченные по возрастанию значения вектор-строки записывают в память;
4) для упорядоченной по возрастанию вектор-строки вычисляют вектор-строку дискретных производных по формуле:
ai=ƒi+1 - ƒi,
где а - вектор-строка дискретных производных из М-1 элементов, i - порядковый номер элемента или ячейки вектор-строки, ƒ - упорядоченная по возрастанию вектор-строка из М элементов;
5) находят порядковый номер ячейки вектор-строки дискретных производных, в которой содержится наименьшее значение дискретной производной;
6) найденный порядковый номер ячейки признают позицией моды;
7) значение элемента упорядоченной по возрастанию вектор-строки под номером, равным позиции моды, признают модой;
8) из записанной в память на шаге 1 вектор-строки вычитают полученную на шаге 7 моду;
9) для полученной после вычитания моды вектор-строки рассчитывают среднеквадратичную ширину углового распределения интенсивности сигнала;
10) рассчитанное на предыдущем шаге значение среднеквадратичной ширины углового распределения интенсивности сигнала сравнивают с теоретическим значением среднеквадратичной ширины углового распределения интенсивности сигнала. Теоретическое значение среднеквадратичной ширины углового распределения интенсивности сигнала рассчитывается из описанных далее принципов.
Распределение акустического давления в пространстве описывается уравнением Гельмгольца:

где  - это оператор Лапласа,
- это оператор Лапласа,  - модуль волнового вектора, ƒ - характеристика источника, Р - искомое распределение давления, которое после регистрации фазированным датчиком можно представить в частотной области следующей функцией:
- модуль волнового вектора, ƒ - характеристика источника, Р - искомое распределение давления, которое после регистрации фазированным датчиком можно представить в частотной области следующей функцией:


где G(ω, x) - функция Грина уравнения Гельмгольца; а(х) - апертурная функция,
включающая в себя аподизацию, а также фазовый сдвиг, обеспечивающий фокусировку на глубину z, ω - частота ультразвукового колебания; с - скорость звука в среде; z - расстояние от исследуемого рассеивателя до апертуры фазированного датчика; х - координата вдоль апертуры.
Формулу (3) в приближении Френеля можно представить в следующем виде:

где используется замена переменной  Формула (5) представляет собой Фурье-преобразование от апертурной функции.
Формула (5) представляет собой Фурье-преобразование от апертурной функции.
В нашей реализации способа использовалась прямоугольная функция аподизации:

где D - это размер апертуры ультразвукового датчика.



Затем рассчитывают величину параметра а относительно х, называемую αлин:

где х0 - координата пика распределения; пределы интегрирования хк и xl определяются из ранее выбранного диапазона для расчета в формуле (1):

Далее переходят к расчету среднеквадратичной ширины углового распределения интенсивности эхосигнала через рассчитанное значение αлин:

Значение а сравнивают с полученным на шаге 9 в результате эксперимента и делают вывод о наличии аберраций. Для наших параметров теоретическое значение среднеквадратичной ширины углового распределения интенсивности, полученное в результате численных расчетов по формуле (12), равно 5,2°. Оно на 1,7% меньше, чем полученное экспериментально для фантома без аберратора, это может быть связано с неточным значением размера апертуры, возможным смещением несущей частоты и влиянием спекл-шума. От полученных экспериментально значений для аберраторов и УЗИ мозга теоретическое значение отличается на 22-45%.
В одном из вариантов предлагаемого способа в качестве ультразвуковой фазированной решетки используется матричный ультразвуковой датчик. Это позволит формировать трехмерные изображения, в которых заложено больше информации, чем в классических двумерных ультразвуковых изображениях.
Предлагаемый способ может осуществляться не только для одного луча, но можно выполнить оценку для каждой точки в зоне сканирования, при этом область сканирования делят на фрагменты и оценивают наличие аберраций поочередно для каждой части каждого фрагмента области сканирования.
Хотя настоящее изобретение описано на примере конкретных вариантов его осуществления, для специалистов будут ясны возможности многочисленных модификаций данного изобретения, не выходящие за границы объема его правовой охраны, определяемого прилагаемой формулой.
Источники информации
1. Fink, М. (1997). "Time reversed acoustics," Phys. Today 50(3), 34-40.
2. Lindsey B.D, Smith S.W. Pitch-catch phase aberration correction of multiple isoplanatic patches for 3-D transcranial ultrasound imaging // IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control. 2013. Vol. 60. PP. 463-480.
Использование: для обнаружения аберраций при ультразвуковом исследовании. Сущность изобретения заключается в том, что осуществляется количественная оценка расширения углового распределения интенсивности. Технический результат: упрощение обнаружения аберраций при ультразвуковом исследовании за счет использования лишь одного ультразвукового датчика. 5 з.п. ф-лы, 4 ил.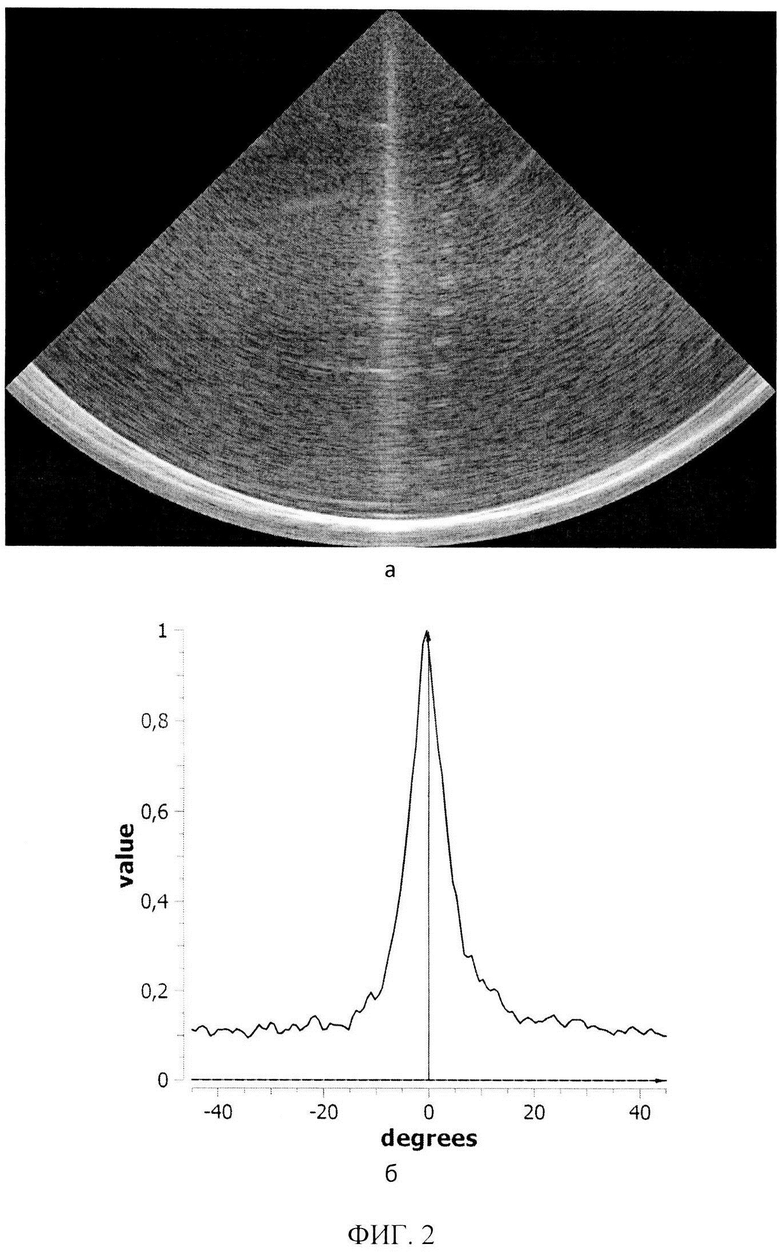
1. Способ обнаружения аберраций при ультразвуковом исследовании, состоящий в том, что ультразвуковую фазированную решетку прикладывают к исследуемому объекту, для улучшения контакта пространство между исследуемым объектом и решеткой заполняют водой или гелем для ультразвуковых исследований, формируют и преобразуют электрические импульсы в зондирующие сигналы, отличающийся тем, что
- выполняют поэлементное сканирование зондирующими сигналами исследуемого объекта в режиме синтезированной апертуры посредством приемо-передающей ультразвуковой фазированной решетки;
- отраженные ультразвуковые сигналы принимают фазированной решеткой по каждому каналу раздельно, усиливают, оцифровывают, выполняют формирование квадратуры и получившийся набор комплексных значений отраженных сигналов записывают в память;
- делят каждое комплексное значение на модуль комплексного числа;
- задают интервал по глубине отностиельно положения фазированной решетки, в котором находится область, для которой необходимо выполнить оценку наличия аберраций;
- рассчитывают задержки прихода сигнала от каждой точки заданного интервала по глубине с учетом сферического фронта ультразвуковой волны;
- задают угол, который сооветствует положению области, для которой необходимо выполнить оценку наличия аберраций;
- рассчитанные задержки прихода сигнала используют при выполнении фокусировки на передачу для заданного угла и интервала по глубине, причем динамической фокусировка является только по глубине при заданном значении угла для оценки наличия аберраций;
- выполняют динамическую фокусировку на прием для всего диапазона углов и заданного интервала по глубине, в результате чего получают матрицу, число строк которой равно числу отсчетов по глубине, а число столбцов - это число лучей;
- из полученной матрицы извлекают первую строку, в результате чего получают вектор-строку, которую сохраняют в память;
- из полученной матрицы извлекают следующую строку и поэлементно прибавляют к полученной на предыдущем шаге вектор-строке;
- операцию по предыдущему шагу повторяют число раз, на два меньшее, чем число отсчетов по глубине;
- полученную вектор-строку делят на число отсчетов по глубине;
- выполняют аподизацию путем свертки с оконной функцией;
- проводят оценку количественного критерия наличия аберраций посредством расчета величины, характеризующей ширину углового распределения интенсивности сигнала;
- полученное значение количественного критерия наличия аберраций сравнивают с теоретическим значением, рассчитанным для случая отсутствия аберраций, или со значением количественного критерия наличия аберраций, полученным для фантома, в котором заведомо отсутствуют аберрации;
- в случае, если полученное значение больше, считают, что аберрации присутствуют.
2. Способ обнаружения аберраций при ультразвуковом исследовании по п. 1, отличающийся тем, что при проведении оценки количественного критерия наличия аберраций в качестве такого критерия рассчитывается среднеквадратичная ширина углового распределения интенсивности сигнала путем выполнения следующей последовательности действий:
- полученную после аподизации вектор-строку записывают в память;
- упорядочивают значения полученной вектор-строки по возрастанию;
- упорядоченные по возрастанию значения вектор-строки записывают в память;
- для упорядоченной по возрастанию вектор-строки вычисляют вектор-строку дискретных производных;
- находят порядковый номер ячейки вектор-строки дискретных производных, в которой содержится наименьшее значение дискретной производной;
- найденный порядковый номер ячейки признают позицией моды;
- значение элемента упорядоченной по возрастанию вектор-строки под номером, равным позиции моды, признают модой;
- из записанной в память после аподизации вектор-строки вычитают определенную на предыдущем шаге моду;
- для полученной после вычитания моды вектор-строки рассчитывают среднеквадратичную ширину углового распределения интенсивности сигнала.
3. Способ обнаружения аберраций при ультразвуковом исследовании по п. 1, отличающийся тем, что в качестве ультразвуковой фазированной решетки используется матричный ультразвуковой датчик.
4. Способ обнаружения аберраций при ультразвуковом исследовании по п. 1, отличающийся тем, что область сканирования делят на фрагменты и оценивают наличие аберраций поочередно для каждой части каждого фрагмента области сканирования.
5. Способ обнаружения аберраций при ультразвуковом исследовании по п. 1, отличающийся тем, что в качестве оконной функции при аподизации сигналов используется окно Гаусса.
6. Способ обнаружения аберраций при ультразвуковом исследовании по п. 1, отличающийся тем, что в качестве оконной функции при аподизации сигналов используется окно Кайзера.
| Lindsey B.D, Smith S.W., Pitch-catch phase aberration correction of multiple isoplanatic patches for 3-D transcranial ultrasound imaging, IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2013, Vol | |||
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| Приспособление для автоматического перевода стрелок машинистом | 1922 |
|
SU463A1 |
| СПОСОБ ИСПРАВЛЕНИЯ ФАЗОВЫХ ИСКАЖЕНИЙ В СИГНАЛАХ ПРИ ТРАНСКРАНИАЛЬНОЙ УЛЬТРАЗВУКОВОЙ ВИЗУАЛИЗАЦИИ | 2020 |
|
RU2744313C1 |
| Пневматическая аэрозольная насадка | 1959 |
|
SU125451A1 |
| WO 2007030016 A1, 15.03.2007 | |||
| US 6023977 A, 15.02.2000. | |||

