Изобретение относится к сельскохозяйственному производству для поточной автоматизированной комбайновой уборке плодово-ягодных и овощных культур, по технологии точного земледелия, на пунктах послеуборочной обработки зерна (при расфасовке и затаривании зерна), к кормопроизводству, на животноводческих фермах для дозированной раздачи кормов и др.
Технология точного земледелия предусматривает получение информации о плодородии на каждом конкретном участке поля для последующего его выравнивания дифференцированным внесением минеральных удобрений.
Известен способ выравнивания плодородия полей, включающий уборку зерновых культур зерноуборочным комбайном, оборудованным датчиком урожайности, бортовым компьютером и GPS-приемником. Датчик урожайности измеряет поток зерна, поступающего в бункер, в это же время система GPS собирает данные о местоположении комбайна и записывает их в память компьютера с указанием урожайности сельскохозяйственной культуры в данной точке. После окончания уборки данные из бортового компьютера переносятся в стационарный ПК (компьютер) агроменеджера, где составляется карта урожайности с привязками на местности. По этим картам устанавливаются проблемные участки с низкой урожайностью, производятся агрохимический или агрофизический анализ почвы этих участков, с помощью дифференцированного внесения удобрений разрабатываются пути выравнивания плодородия на этих участках для стабилизации посевов на всем полевом массиве. По этим материалам подготавливаются карты задания и расчеты доз удобрений, вносимых разбрасывателем на данном участке. Затем карта задания вносится в бортовой компьютер трактора, сагрегатированного с разбрасывателем минеральных удобрений, оборудованным системой автоматического дозирования, что обеспечивает при работе разбрасывателя минеральных удобрений дифференцированное их внесение.
Каждая сельскохозяйственная культура при уборке урожая выносит из почвы в большей или меньшей степени тот или иной вид минеральных удобрений (N, Р, K, Са) поэтому важно покоординатно измерить урожайность не только зерновых культур, но и плодово-ягодных и овощных культур.
Кроме того, тенденция мирового прогресса стремится к роботизации технологических процессов в сельскохозяйственном производстве. Для этого необходимо не только точно измерить урожайность, но и довести технологию уборки до завершения с расфасовкой и точным весовым дозированием каждой тары.
Известно устройство для измерения расхода зерна (Патент №2161396, МПК A01D 41/12 G01F 1/30, 10.01.2001), состоящее из лопасти, пружины, датчика-преобразователя, генератора импульсов и счетчика. Лопасть установлена на горизонтальном валу, на выходе выгрузного шнека и воспринимает напор зерна. Лопасть имеет криволинейную форму, обеспечивающую перпендикулярность ее рабочей поверхности к траектории движения потока зерна. Величина отклонения лопасти зависит от расхода зерна и фиксируется датчиком.
Наиболее близким по технической сущности является датчик расхода зерна в потоке A352, который выбран в качестве прототипа, включающий измеритель расхода зерна, состоящий из измерительной шахты с направляющей и рабочей лопатками, укрепленной на тензодатчике, электронным блоком с управляющим контроллером и RS485 интерфейсом. Недостатком известного устройства является низкая точность, помехоустойчивость и небольшой диапазон измерений.
Техническая задача заключается в повышении точности измерения и расширения области применения за счет возможности использования при уборке других культур.
Техническая задача достигается тем, что датчик расхода зерна, включающий измеритель расхода зерна, состоящий из измерительной шахты с направляющей лопаткой и рабочей лопаткой, закрепленной на тензодатчике, электронным блоком с управляющим контроллером и RS485 интерфейсом, отличающаяся тем, что измерительная шахта снабжена выгрузным барабаном с шаговым двигателем, транспортером перемещения тары шаговым двигателем, а измеритель количества измеряемого потока культуры выполнен в виде скобы, закрепленной на корпусе измерительной шахты с двумя соосными отверстиями с резьбой, в которых закреплены два датчика давления с частотными выходами сигналов, зажимающие конец рабочей лопатки, опирающейся на подвижную опору и установленную с возможностью изменения угла наклона, выходы датчиков соединены с входами D и С D-триггера, выход D-триггера соединен по RS485 интерфейсу с контроллером и входом драйвера управления шаговыми двигателями, к контроллеру подключены навигатор, флеш-память и GSM-GPRS модем сотовой связи, два выхода драйвера управления шаговыми двигателями подключены к шаговому двигателю регулировки угла наклона рабочей лопатки, другие два выхода драйвера подключены к шаговым двигателям выгрузного барабана и транспортера перемещения тары под загрузку.
Изобретение поясняется чертежом.
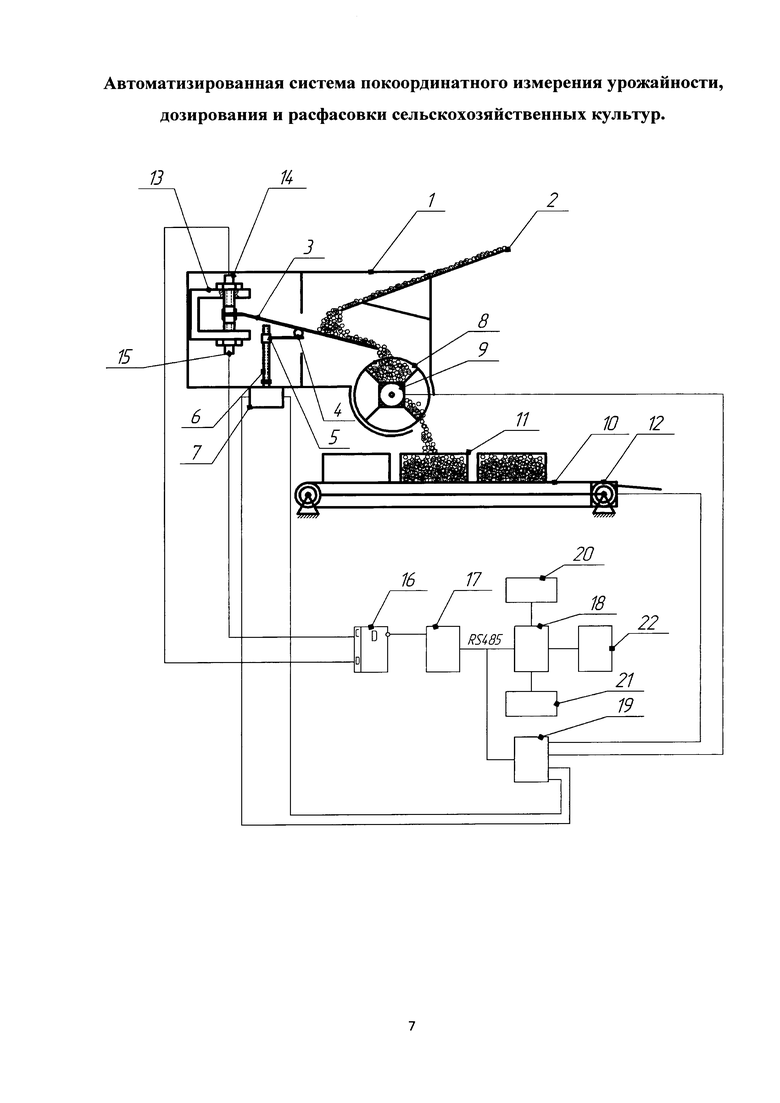
На чертеже изображена принципиальная схема автоматизированной системы покоординатного измерения урожайности с дозированием и расфасовкой сельскохозяйственных культур.
Автоматизированная система покоординатного измерения урожайности с дозированием и расфасовкой сельскохозяйственных культур содержит измерительную шахту 1 с направляющей 2 и рабочей лопаткой 3. Рабочая лопатка 3 опирается на подвижную опору 4 с гайкой 5, перемещаемой с помощью винта 6, вращаемой шаговым двигателем 7. Выгрузной барабан 8 с шаговым двигателем 9, транспортером 10, перемещающим тару 11 с помощью шагового двигателя 12. Измеритель поступающего потока убираемой культуры, состоит из скобы 13, закрепленной на корпусе измерительной шахты 1 с двумя соосными отверстиями с резьбой, в которых закреплены два частотных датчика давления 14 и 15, зажимающих конец рабочей лопатки 3. Сигнальные выходы с датчиков давления 14 и 15, подаются на D и С входы D-триггера 16, выход D-триггера подключен к модулю частотного ввода 17. Выход модуля частотного ввода подключен по RS485 интерфейсу к контроллеру 18 и драйверу 19 управления шаговыми двигателями. Контроллер оснащен навигатором 20, флеш-памятью 21 и GSM-GPRS модемом сотовой связи 22. Сигналы с выхода драйвера 19 осуществляет управление шаговым двигателем 7, изменяющим наклон рабочей лопатки 3, шаговым двигателем 9 - для прокручивания выгрузного барабана 8 и шаговым двигателем 12 для перемещения транспортера 10 с тарами 11.
Автоматизированная система покоординатного измерения урожайности с дозированием и расфасовкой сельскохозяйственных культур работает следующим образом
При комбайновой уборке зерна, плодово-ягодных и овощных культур продукт поступает в измерительную шахту 1 на направляющую лопатку 2 для подачи с наименьшей кинетической составляющей давления на рабочую лопатку 3. Рабочая лопатка 3 опирается на регулируемую по высоте опору 4 с гайкой 5, перемещаемую с помощью винта 6, закрепленного на оси вращения шагового двигателя 7. С измерительной лопатки 3 продукт поступает в выгрузной барабан 8, поделенный на 4 сектора, который приводится во вращение шаговым двигателем 9. После заполнения одного сектора запрограммированной дозой продукта, происходит перегрузка его в тару 11, размещенную под барабаном 9 на транспортере 10 и перемещаемую с помощью шагового двигателя 12. Дозирование производится измерителем, выполненным на скобе 13, закрепленной на корпусе измерительной шахты 1. Скоба выполнена с двумя соосными отверстиями с резьбой, в которых закреплены два датчика давления 14 и 15 с частотными выходами сигналов, которые зажимают конец рабочей лопатки 3. Сигнальные выходы в виде частот с датчиков давления 14 и 15 подаются на D и С входы D-триггера 16. При отсутствии продукта на рабочей лопатке 3, давление на оба датчика 14, 15 будет одинаковым и, соответственно, частоты выходных так же будут одинаковыми. В этом случае на выходе D-триггера 16 будет нулевой сигнал. При поступлении измеряемой массы продукта на рабочую лопатку 3, давление на датчик 14 будет увеличиваться, а на датчик 15 уменьшаться, что вызовет увеличение частоты на выходе 14 датчика и уменьшение на выходе 15. В результате на выходе D-триггера 16 появляется частота равная разности частот 14 и 15 датчика. Модуль частотного ввода 17 преобразует частоту в цифровой код подсчетом количества импульсов за определенный промежуток времени, и по RS485 интерфейсу передаст информацию в контроллер 18. Эта информация вместе с информацией о местоположении мобильного агрегата на поле, получаемой от навигатора 20, записывается контроллером 18 во флеш-память 21 и GSM-GPRS модемом сотовой связи 22 передается на сервер диспетчерского центра. Драйвер 19 управления шаговыми двигателями получает от контроллера 18 команду управления по RS485 интерфейсу шаговым двигателем 7 для изменения наклона рабочей лопатки 3 с помощью винта 6, перемещающего опору 4. В этом случае контроллер 18 дает команду по RS485 интерфейсу модулю частотного ввода 17 на соответствующее изменение времени подсчета импульсов. Кроме того, контроллер 18 дает команду драйверу 19 управления шаговыми двигателями 9 и 12 о своевременном прокручивании на 90° барабана 8 и перемещении тары 11 при ее заполнении транспортером 10.
Использование автоматизированной системы покоординатного измерения урожайности с дозированием и расфасовкой сельскохозяйственных культур позволит автоматизировать процесс комбайновой уборки сельскохозяйственных культур, повысить производительность труда, сократить сроки уборки и как следствие сократить потери урожая.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная система поточного измерения урожайности зерна | 2018 |
|
RU2670718C9 |
| Автоматизированная система поточного измерения урожайности зерна | 2019 |
|
RU2704331C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2011 |
|
RU2460268C1 |
| Автоматизированный агрегат для дифференцированного внесения жидких минеральных удобрений | 2017 |
|
RU2676319C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2011 |
|
RU2489832C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2013 |
|
RU2518737C1 |
| Полевой опрыскиватель для автоматического регулирования технологического процесса внесения жидких минеральных удобрений | 2015 |
|
RU2629784C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПРОЦЕССА СЕЛЬХОЗМАШИНЫ | 2009 |
|
RU2399185C1 |
| Устройство для автоматизации процесса высева семян | 2022 |
|
RU2789549C1 |
| Ягодоуборочный комбайн с автоматической системой затаривания | 2019 |
|
RU2707528C1 |
Изобретение относится к сельскохозяйственному машиностроению. Автоматизированная система покоординатного измерения урожайности, дозирования и расфасовки сельскохозяйственных культур включает измеритель расхода зерна, который состоит из измерительной шахты с направляющей лопаткой и рабочей лопаткой, закрепленной на тензодатчике, электронный блок с управляющим контроллером и RS485 интерфейсом. Измерительная шахта снабжена выгрузным барабаном с шаговым двигателем, транспортером, который перемещает тару с помощью шагового двигателя. Измеритель поступающего потока убираемой культуры состоит из скобы, закрепленной на корпусе измерительной шахты с двумя соосными отверстиями с резьбой, в которых закреплены два частотных датчика давления с частотными выходами сигналов, зажимающих конец рабочей лопатки. Сигнальные выходы с датчиков давления подаются на входы D-триггера. Выход D-триггера подключен к модулю частотного ввода. Выход модуля частотного ввода подключен по RS485 интерфейсу к контроллеру и драйверу управления шаговыми двигателями. Контроллер оснащен навигатором, флеш-памятью и GSM-GPRS модемом сотовой связи. Сигналы с выхода драйвера осуществляют управление шаговым двигателем, изменяющим наклон рабочей лопатки, шаговым двигателем для прокручивания выгрузного барабана и шаговым двигателем для перемещения транспортера с тарами. Использование автоматизированной системы покоординатного измерения урожайности с дозированием и расфасовкой сельскохозяйственных культур позволит автоматизировать процесс комбайновой уборки сельскохозяйственных культур, повысить производительность труда, сократить сроки уборки и, как следствие, сократить потери урожая. 1 ил.
Автоматизированная система покоординатного измерения урожайности, дозирования и расфасовки сельскохозяйственных культур, характеризующаяся наличием измерительной шахты с направляющей лопаткой и рабочей лопаткой, электронного блока с управляющим контроллером и RS485 интерфейсом, при этом измерительная шахта снабжена выгрузным барабаном с шаговым двигателем, транспортером перемещения тары шаговым двигателем, а измеритель количества измеряемого потока культуры выполнен в виде скобы, закрепленной на корпусе измерительной шахты с двумя соосными отверстиями с резьбой, в которых закреплены два датчика давления с частотными выходами сигналов, зажимающие конец рабочей лопатки, опирающейся на подвижную опору и установленной с возможностью изменения угла наклона, выходы датчиков соединены с входами D и С D-триггера, выход D-триггера соединен по RS485 интерфейсу с контроллером и входом драйвера управления шаговыми двигателями, к контроллеру подключены навигатор, флеш-память и GSM-GPRS модем сотовой связи, два выхода драйвера управления шаговыми двигателями подключены к шаговому двигателю регулировки угла наклона рабочей лопатки, другие два выхода драйвера подключены к шаговым двигателям выгрузного барабана и транспортера перемещения тары под загрузку.
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ОБЪЕМНОЙ ПРОИЗВОДИТЕЛЬНОСТИ ЭЛЕВАТОРА, В ОСОБЕННОСТИ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ | 1999 |
|
RU2249324C2 |
| СПОСОБ ОЦЕНКИ УРОЖАЙНОСТИ ЗЕРНОВЫХ КУЛЬТУР В ЗАВИСИМОСТИ ОТ ПОГОДНЫХ УСЛОВИЙ | 2004 |
|
RU2281644C9 |
| US 20020014116 A1, 07.02.2002. | |||

