Область техники
Изобретение относится к устройству для измерения объемной производительности элеватора, в транспортирующем канале которого непрерывно движутся транспортирующие ковши, загруженные транспортируемым материалом, в частности зерновыми культурами, причем по существу параллельно поверхностям ковшей, предпочтительно плоским, ориентирован световой пучок фотоячейки, которая расположена на транспортирующем канале поперечно ему, и по сигналам светового и темнового времени которой процессор сигналов определяет в проходящих транспортирующих ковшах расстояние до кромки транспортируемого материала с учетом расстояния между транспортирующими ковшами и толщины ковшей и из этой величины и поперечного сечения транспортирующего канала определяет объем транспортируемого материала.
Уровень техники
Из патентного документа ФРГ №3045728 С2 известно устройство такого типа, в котором загруженные собранной продукцией, в частности зерновыми культурами, транспортирующие ковши непрерывно перемещаются с помощью бесконечной тяговой цепи в прямоугольном транспортирующем канале, причем ковши расположены примерно перпендикулярно боковым стенкам канала. Верхние поверхности слоя зерна в ковшах ориентированы примерно горизонтально, а транспортирующий канал в комбайне обычно расположен наклонно к вертикали в плоскости движения тяговой цепи. Параллельно ковшам между боковыми стенками транспортирующего канала установлена фотоячейка. Темновое время фотоячейки при проходе отдельных загруженных ковшей измеряют и по нему определяют объем перегруженного зерна с учетом затемнения от прохода самих ковшей в соответствии с их толщиной и высоты загрузки ковшей, а также с помощью умножения на площадь поперечного сечения транспортирующего канала или с помощью другой функции геометрии транспортирующего канала. Это устройство работает относительно точно только в тех случаях, когда при нормальном положении элеватора комбайн находится на горизонтальной плоскости, а также при полной загрузке элеваторных ковшей. При поперечных или продольных наклонах элеватора относительно его нормального положения, что происходит при движении по уклонам, при различной загрузке зернового бункера и при движении по рыхлому грунту, устройство работает крайне неточно, так что в большинстве случаев показывает завышенный объем зерна. Это устройство принято в качестве ближайшего аналога.
Далее, из патентного документа ФРГ №19544057 А1 известна корректировка измерений веса транспортируемого зерна с помощью датчика веса, который при наклонах элеватора систематически занижает вес. Корректировку производят путем вычислений с учетом сигнала датчика наклона, который определяет наклон в двух направлениях, для получения действительного количества перегруженного зерна. Такое взвешивающее устройство элеватора с разделением привода технически сложно и требует больших затрат.
Далее, из патентного документа ЕПВ №0702891 А1 известна система разработки сводного каталога урожайности путем увязки данных сбора продукции, непрерывно измеряемых в уборочной машине, с данными местоположения, сигналами скорости и константами времени продолжительности рабочего процесса. При этом используются записанные в памяти или вводимые стандартные данные веса на литр для отдельных типов зерновых культур в расчете на средние величины качества и влажности. На индикатор непрерывно выводится производительность уборки, как и связанные с ней относительные потери.
Сущность изобретения
Задачей, на решение которой направлено изобретение, является усовершенствование устройства указанного назначения с тем, чтобы оно при более простом выполнении имело более высокую точность.
Решение поставленной задачи обеспечивается в измерительном устройстве для измерения производительности элеватора, в транспортирующем канале которого непрерывно движутся транспортирующие ковши, загруженные транспортируемым материалом, в частности зерновыми культурами. По существу параллельно поверхностям ковшей ориентирован световой пучок фотоячейки, которая расположена на транспортирующем канале поперечно ему, и по сигналам светового и темнового времени которой процессор сигналов определяет в проходящих транспортирующих ковшах расстояние до кромки транспортируемого материала с учетом расстояния между транспортирующими ковшами и толщины ковшей и из этой величины и поперечного сечения транспортирующего канала определяет объем транспортируемого материала. Согласно изобретению к процессору сигналов подсоединены дополнительные измерительные средства, по измерительным сигналам которого устанавливается в данном случае наклон и/или конфигурация верхней поверхности транспортируемого материала, и в соответствии с ее направлением и положением относительно светового пучка определяется точный объем транспортируемого материала.
Предпочтительные варианты выполнения представлены в дополнительных пунктах формулы изобретения.
Для точного определения объема полученные с помощью фотоячейки данные объема корректируются с учетом наклона поверхности зернового материала к поверхности ковша как в направлении измерительного излучения, так и в перекрестном направлении, предпочтительно перпендикулярно ему. При этом наклоны определяются дополнительными измерительными средствами либо в виде фотоячеек, либо в виде отдельных датчиков наклона и/или ускорения, либо комбинированной системой.
Дополнительные измерительные средства могут представлять собой пару фотоячеек, которые расположены поперечно транспортирующему каналу параллельно друг другу и перекрестно с первой фотоячейкой.
Устройство для измерения объема зернового материала в первом предпочтительном исполнении оснащено тремя фотоячейками, из которых одна установлена точно посредине между двумя противолежащими сторонами транспортирующего канала, а две другие фотоячейки, т.е. пара фотоячеек, расположены перпендикулярно ей, предпочтительно на той же высоте. Каждая из фотоячеек пары предпочтительно расположена у одной из параллельных им стенок транспортирующего канала. При этом поворот транспортирующего канала только вокруг первого луча средней фотоячейки не оказывает никакого влияния на ее измерения темнового времени и соответственно расстояния, то есть на измерение времени прохода от корпуса ковша до поверхности зерна. Две другие фотоячейки показывают одинаковый уровень слоя зерна, который, однако, в зависимости от поворота и от величины, равной половине ширины транспортирующего канала, будет больше расстояния, измеряемого первой фотоячейкой.
Фотоячейка, которая служит для определения высоты кромки транспортируемого материала, может быть расположена посередине поперечного сечения транспортирующего канала между теми сторонами транспортирующего канала, к которым транспортирующие ковши устанавливаются перпендикулярно независимо от количества транспортируемого материала.
Измерительное устройство может содержать несколько, например две параллельные фотоячейки для определения расстояния до кромки транспортируемого материала посредине поперечного сечения относительно сторон транспортирующего канала, у которых они расположены. Параллельные фотоячейки могут быть расположены у параллельных им стенок.
Параметры чувствительности приемника фотоячейки предпочтительно имеют диаметр больше поперечного сечения наибольшего из элементов транспортируемого материала.
Для снижения погрешностей от допусков величины угла естественного откоса транспортирующие ковши вблизи зоны приближения к фотоячейкам могут подвергаться встряхиванию и/или стенки транспортирующего канала могут быть выполнены таким образом, чтобы тормозить транспортируемый материал.
По меньшей мере в одном направлении могут быть расположены несколько параллельных фотоячеек для определения контура поверхности транспортируемого материала.
Световые излучатели и фотоприемники фотоячеек могут быть расположены на различных стенках транспортирующего канала напротив друг друга, или расположены рядом друг с другом и направлены на отражатель на противоположной стороне.
Если поворот транспортирующего канала происходит только вокруг второго направления излучения, то наклон определяется по вызванным этим наклоном, отличающимся друг от друга сигналам темнового времени и соответственно расстояниям, отнесенным к расстоянию между фотоячейками. Далее средняя высота слоя зерна легко вычисляется из максимальной высоты кромки по измерениям первой фотоячейки и указанного наклона с отнесением к половине ширины транспортирующего канала.
Если же транспортирующий канал наклонен с различным поворотом вокруг обеих осей направления излучения, то необходимое для определения объема среднее расстояние до верхней поверхности зерна получают также из расстояния до верхней кромки, замеренного первой фотоячейкой, путем его уменьшения на вызванную наклоном разность высот кромки, приведенную к середине транспортирующего канала, что соответствует определенному двумя другими фотоячейками наклону, отнесенному к половине ширины транспортирующего канала.
Если в предыдущем случае две параллельные фотоячейки (пара фотоячеек), которые предназначены для определения наклона, установлены на расстоянии, равном половине ширины транспортирующего канала, то не требуется никаких дополнительных расчетов, и для получения необходимой величины среднего расстояния измеренную разность расстояний можно прямо вычитать из расстояния, измеренного первой фотоячейкой.
Однако в том случае, когда расстояние между двумя параллельными фотоячейками больше половины ширины транспортирующего канала, точность измерений повышается, хотя слишком близкое расположение фотоячеек к стенкам транспортирующего канала может привести к снижению точности, поскольку трение о стенки может тормозить движение зерна и несколько снижать уровень кромки. Кроме того, если крупность зерна меньше зазора между кромкой лопасти и стенкой, при транспортировании могут иметь место потери зерна на кромках.
Таким образом, из последовательности сигналов двух параллельных фотоячеек получают сигнал наклона, который может использоваться также и для других функций уборочной машины, например для компенсации эффекта наклона при просеивании, для облегчения управления при движении по склону или для дополнительного управления перегрузкой собранного материала на параллельно движущееся транспортное средство.
Далее, наклон во втором направлении, предпочтительно в направлении длины уборочной машины, можно определить из трех измеренных расстояний, если наиболее высокую величину уровня кромки зернового материала на боковых сторонах, измеренную параллельными фотоячейками, экстраполировать для получения наиболее высокого углового уровня (в углу ковша), из этого углового уровня установить разность с уровнем, измеренным одиночной фотоячейкой на другой боковой стенке в ее середине, и эту разность отнести к ширине транспортирующего канала. Эту величину наклона, полученную простым образом из наивысшего углового уровня по отношению к среднему боковому уровню, также можно использовать в уборочной машине для других целей, таких как управление мощностью двигателя или регулирование скорости.
Одно из дополнительных измерительных средств может представлять собой по меньшей мере один датчик ускорения и/или наклона. Величина наклона, измеренная дополнительным измерительным средством в виде такого датчика, может использоваться для корректировки измерений уровня одиночной фотоячейки, и при этом требуется только одна корректировка, если одиночная фотоячейка расположена на боковой стенке посредине, а наклон измеряется относительно горизонтальной оси, перпендикулярной фотоячейке.
Когда фотоячейка смещена в направлении отхода ковша от тяговой цепи, провисание ковша при повышенной загрузке не влияет на точность измерений, если фотоячейка расположена в середине поперечного сечения ковша, так как поперечное сечение объема зернового материала, определяемое из измеренного среднего расстояния и ширины транспортирующего канала, остается неизменным по отношению к наклону верхней поверхности, а также к наклону поверхности ковша к направлению измерения, то есть направлению транспортирования.
Приведенные выше рассуждения действительны при нормальном заполнении ковшей, когда они покрыты по всей поверхности. При малой загрузке маленькие объемы принимают форму кососрезанных колонн, призм и пирамид с протяжением в направлении транспортирования и контурами кромок в соответствии с наклонами транспортирующего канала. Для определения таких относительно малых объемов имеет преимущество то, что фотоячейки определяют наиболее высокую кромку уровня. Когда фотоячейки пары лежат вблизи боковых стенок, по меньшей мере один из измеряющих лучей воспринимает также и наименьшую остаточную величину.
Величины измерения остаточных количеств, которые воспринимаются только одной или двумя фотоячейками, сами по себе позволяют производить только оценку объема. Однако, если имеется возможность получать соответствующие внешние сигналы наклона, то возможно точное расчетное определение остаточных объемов по наивысшей измеренной величине высоты с учетом положения соответствующей фотоячейки и по сигналам наклона, а также с учетом геометрии транспортирующего канала и ковша. Если нет возможности получать внешние сигналы наклона, то используется экстраполяция по времени ранее полученных сигналов наклона при полностью загруженных ковшах. Непрямоугольные поперечные сечения транспортирующего канала и неплоские поверхности ковшей должны учитываться расчетным путем при определении объемов.
Проверка и калибровка сигналов фотоячейки проводится по временному соотношению расстояний между следующими друг за другом ковшами и чередованию светового и темнового временных периодов. Таким образом, устанавливают отношение измеренного темнового времени к общему времени светового и темнового периодов, а из него выводят относительное темновое время ковша с тем, чтобы получить величину расстояния по отношению к расстоянию между ковшами.
Повышение точности измерений достигается при параллельном использовании величин наклона, которые определены по сигналам фотоячеек, и величин наклона, генерируемых внешним источником, причем соответствующие величины либо усредняются, либо производится соответствующий выбор между величинами, когда результат одного из измерений представляется искаженным.
Разумеется, измерение конфигурации и положения поверхности зернового материала имеет более высокую точность по сравнению с их определением посредством сигналов от датчиков наклона и ускорения, поскольку поверхность сыпучего материала в зоне угла естественного откоса в обычном случае не изменяется и устанавливается заново только при переполнении и при динамическом возмущении. Однако постоянное трение сыпучего материала о стенки транспортирующего канала при транспортировании побуждает зерновой материал снова и снова создавать плоскую поверхность, перпендикулярную суммарному вектору ускорения, включая вектор гравитации. Поэтому целесообразно выполнять боковую стенку транспортирующего канала по меньшей мере перед входом в зону измерения слегка профилированной для встряхивания материала или обеспечить передачу зерновому материалу вибрационного движения от ковшей с их возбуждением, например, в зоне присоединения к тяговой цепи посредством соответствующего отклонения направляющей цепи.
Если место установки фотоячейки выбирается в верхней части транспортирующего канала с тем, чтобы при подъеме ковшей уже произошло полное выравнивание поверхности зерна, а потерь зерна на кромках ковшей в дальнейшем практически уже не было, следует учитывать, что там возникают относительно высокие ускорения транспортирующего канала при движении по неровностям грунта, причем эти ускорения обычно отличаются от тех, которым подвержены датчики наклона и ускорения, расположенные близко к земле.
Другой способ повышения точности путем избыточности измерений достигается при увеличении числа фотоячеек и соответствующем их распределении в одной плоскости, т.е. в одном направлении могут быть расположены несколько фотоячеек. Посредством оценки большего числа сигналов соседних фотоячеек можно дополнительно определять профиль верхней поверхности зерна для учета при расчете объема или среднего наклонного уровня. Фотоячейки в угловых зонах позволяют также точно определять малые объемы в неполностью загруженных ковшах без использования величин наклона от внешних источников или по результатам экстраполяции, при этом наклоны уровня выводятся по сигналам соседних датчиков, затемняемых в функции времени.
Ввиду того, что в компьютерах уборочных машин обычно заложена информация о виде и влажности убираемого материала, целесообразно при определенных обстоятельствах в дополнение к корреляционной функции, которая может быть записана в памяти, например, в виде таблицы, использовать также функцию конфигурации для корректировки объема с учетом неплоского профиля верхней поверхности.
Далее, поскольку поверхность зернового материала имеет грубую структуру, а диаметр кукурузных зерен, фасоли, гороха может доходить почти до 1 см, для достижения повторяемых величин измерения целесообразно производить усреднение положения кромки уже посредством выбора диаметров световых пучков фотоячеек. Световые пучки должны охватывать несколько зерен или объектов. Даже пустые ковши должны полностью затемнять фотоячейку при своем проходе за счет полки соответствующей высоты.
Для того, чтобы по возможности уменьшить влияние старения и загрязнения источника светового излучения на точность измерений, целесообразно, чтобы в памяти были записаны максимальный световой и минимальный темновой сигналы и посредине между крайними величинами была установлена пороговая величина для опознавания переходов, определяющих положение нижней или верхней кромки.
Фотоячейки могут быть выполнены из двух частей - излучателя и приемника, которые расположены на противоположных, т.е. различных, стенках транспортирующего канала напротив друг друга или парой рядом друг с другом на одной стороне, и направлены на отражатель на противоположной стороне транспортирующего канала, что облегчает монтаж.
Краткое описание фигур чертежей
Далее изобретение будет описано на примере выполнения со ссылками на чертежи, на которых:
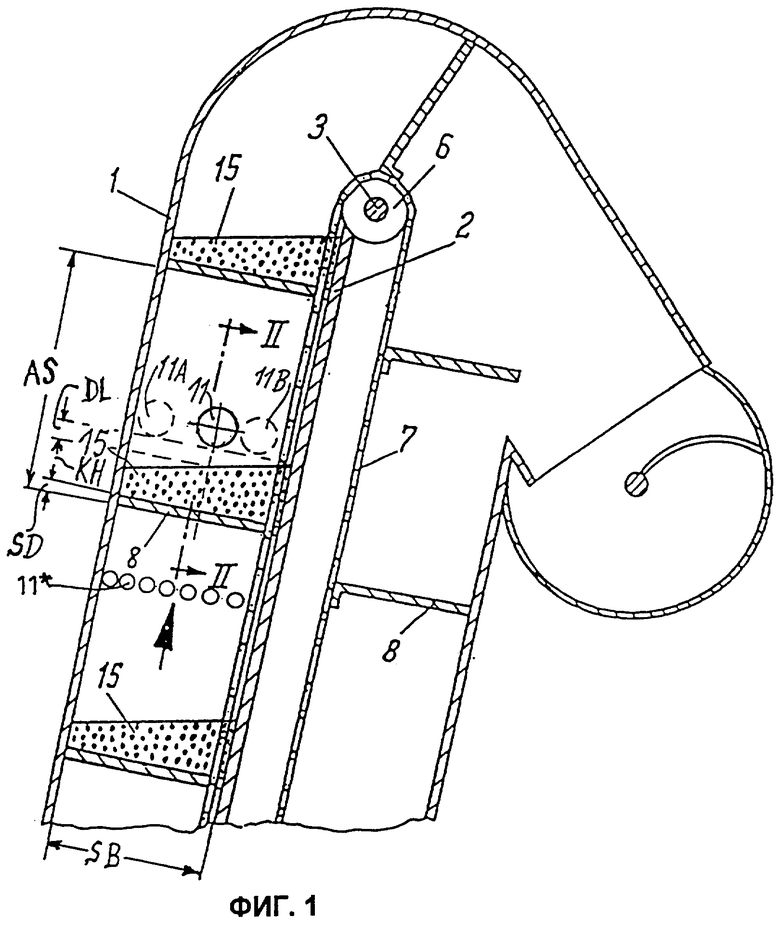
фиг.1 изображает в продольном разрезе участок транспортирующего канала;
фиг.2 изображает участок транспортирующего канала в разрезе по линии II-II на фиг.1;
фиг.3 схематично представляет объем зерна с наклоном вокруг первой оси 1;
фиг.4 схематично представляет объем зерна с наклоном вокруг второй оси 2;
фиг.5 схематично представляет объем зерна с двойным наклоном;
фиг.6 представляет блок-схему измерительного устройства.
Сведения, подтверждающие возможность осуществления изобретения
На фиг.1 показан верхний участок элеватора в открытом сбоку виде. Ковши 8 элеватора, загруженные убираемым материалом 15, в частности, в виде зерна, приводятся цепью 7, которая огибает звездочку 6 на верхнем валу 3, и движутся вверх, поднимая материал, с разгрузкой в верхней зоне разворота ковшей.
Отдельные объемы зерна в ковшах 8 ограничены с боковых сторон и с наружной стороны прямоугольным транспортирующим каналом 1, а с внутренней стороны разделительной стенкой 2. Между двумя боковыми стенками установлена фотоячейка 11 таким образом, что ее световой пучок ориентирован параллельно проходящему мимо нее ковшу 8. Предпочтительно фотоячейка 11 расположена в поперечном сечении посредине между внутренней стенкой 2 и наружной стенкой 1.
В той же плоскости элеватора, что и плоскость расположения фотоячейки 11, или с небольшим смещением в направлении транспортирования между внутренней стенкой 2 и наружной стенкой 1 находятся дальнейшие фотоячейки 21, 21А, так что их световые пучки расположены параллельно друг другу и перекрестно световому пучку фотоячейки 11 при их смещенном положении.
Очевидно, что при проходе нижних кромок ковшей 8 мимо отдельной фотоячейки 11 создается начальный световой сигнал, так что при по существу постоянной скорости транспортирования временной интервал между стартовыми импульсами световых сигналов соответствует расстоянию AS между ковшами 8. Следует определить соотношение с этим расстоянием темновых интервалов при проходе зернового материала 15 и ковшей 8 для получения относительной высоты загрузки КН вместе с толщиной SD ковша. Искомый объем зерна получают по данным расстояния загрузки КН и площади поперечного сечения транспортирующего канала в тех случаях, когда поверхность зерна является плоской и параллельной световому пучку от фотоячейки. Наклон ковша относительно транспортирующего канала и наклон транспортирующего канала относительно вертикали и относительно светового пучка не оказывают никакого влияния на указанное определение объема.
Дальнейшее повышение точности обеспечивается оценкой конфигурации поверхности, для чего вместо одной фотоячейки 11 устанавливают параллельно целый ряд фотоячеек 11*. По различным временным интервалам прохода зерновых объемов и особенно по различным моментам начала темнового времени получают профиль поверхности, по конфигурации которого определяют объем профилированной части.
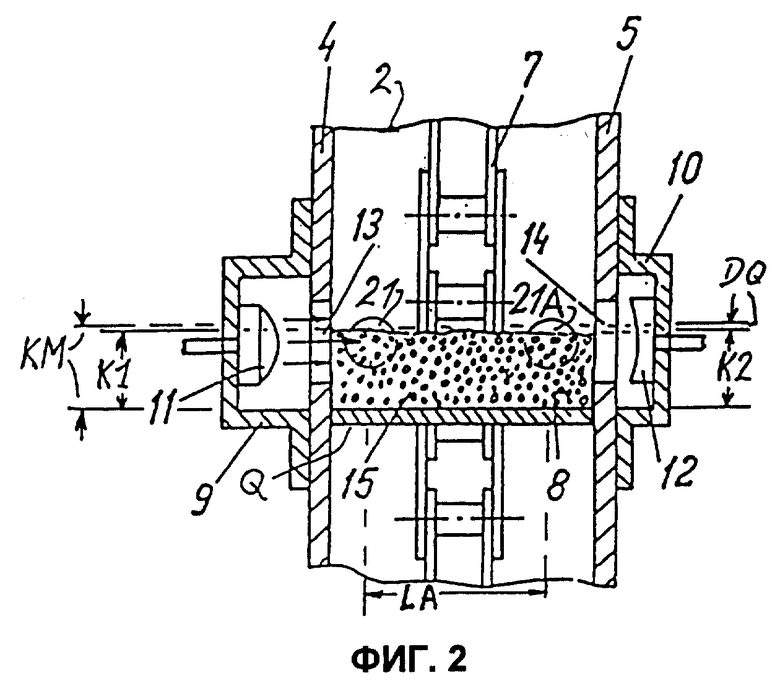
На фиг.2 представлен разрез транспортирующего канала по линии II-II, где показаны в разрезе боковые стенки 4 и 5 с установленными на них частями 11, 12 фотоячейки, а именно излучателем 11 инфракрасного излучения и фотодетектором 12. Части фотоячейки закрыты снаружи защитными корпусами 9, 10 и установлены за окошками 13, 14, внутренние поверхности которых расположены заподлицо со стенками 4, 5.
Световой пучок фотоячейки 11 и параметры чувствительности приемника предпочтительно имеют поперечное сечение больше, чем транспортируемые объекты, то есть зерновой материал, с тем, чтобы обеспечить получение как можно более точного передаваемого сигнала для определения переходов между светом и затемнением.
Далее, две дополнительные фотоячейки 21, 21А показаны расположенными по обеим сторонам от тяговой цепи 7 вблизи боковых стенок 4, 5, но на некотором удалении от них, таким образом, что их световые пучки лежат в одной плоскости с лучами первой фотоячейки 11. При таком расположении моменты начала отдельных темновых сигналов дают величины положения К1, К2 верхней кромки загрузки в зоне световых лучей. Разность по времени, а соответственно и определяемая по ней пространственная разность DQ между высотными положениями К1, К2, отнесенная к расстоянию LA между фотоячейками, дает величину поперечного наклона уровня в транспортирующем канале.
Далее, разность DL (фиг.1) между средней величиной КМ точных положений К1, К2 кромки и положением кромки в зоне первой фотоячейки 11, отнесенная к половине ширины SB транспортирующего канала, дает величину продольного наклона.
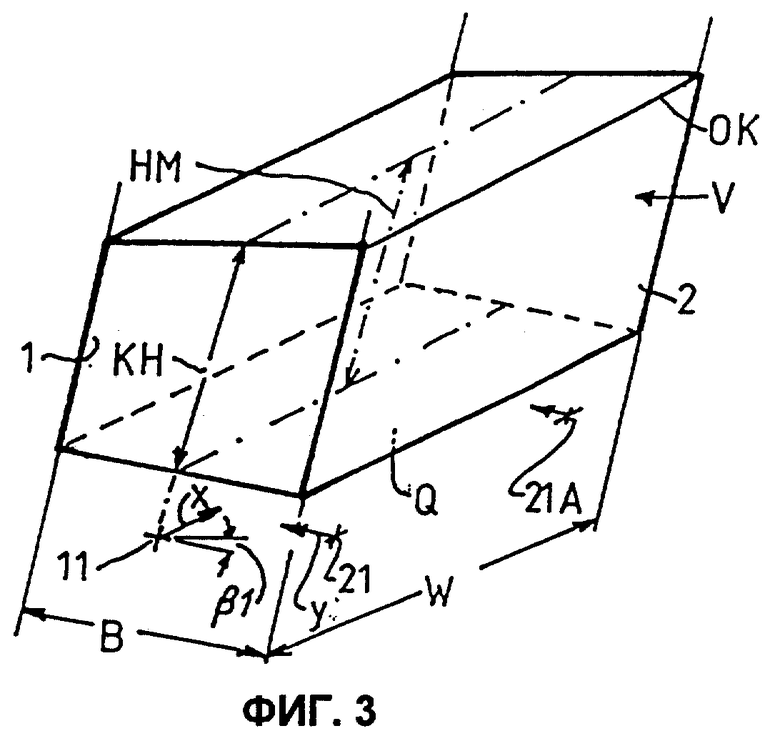
Фиг.3-5 иллюстрируют использование указанных величин наклона для точного определения объема. Если ковш полностью загружен зерновым материалом, а его поверхность может рассматриваться по существу как плоская, то объем транспортируемого материала определяется как произведение величины Q поперечного сечения транспортирующего канала на расстояние НМ загрузки в середине ковша. Следовательно, задача в основном сводится к тому, чтобы по одному из сигналов фотоячейки измерить локальное расстояние загрузки, а по относительному к ней положению других фотоячеек и по их сигналам о положении кромки посредством определяемых по ним наклонов определить среднее расстояние НМ загрузки в середине ковша.
На фиг.3 схематично показан объем зернового материала в транспортирующем канале прямоугольного сечения Q с шириной В и длиной W. Поверхность является плоской и горизонтальной, а передняя и задняя стенки 1, 2 транспортирующего канала наклонены с поворотом только вокруг оси Х фотоячейки 11 на угол β1. Объем материала проходит мимо фотоячейки 11 по середине ширины транспортирующего канала, так что после вычитания темнового времени на толщину ковша расстояние КН загрузки определяется по темновому времени, отнесенному ко времени периода прохода. Обе фотоячейки 21, 21А, которые установлены между внутренней и наружной стенками, показывают практически одновременно начало темновой фазы, поскольку верхняя кромка ОК одновременно пересекает обе фотоячейки. Это показывает, что нет никакого наклона с поворотом вокруг оси Y транспортирующего канала, и замеренное первой фотоячейкой 11 расстояние КН загрузки соответствует также среднему расстоянию НМ загрузки в середине ковша.
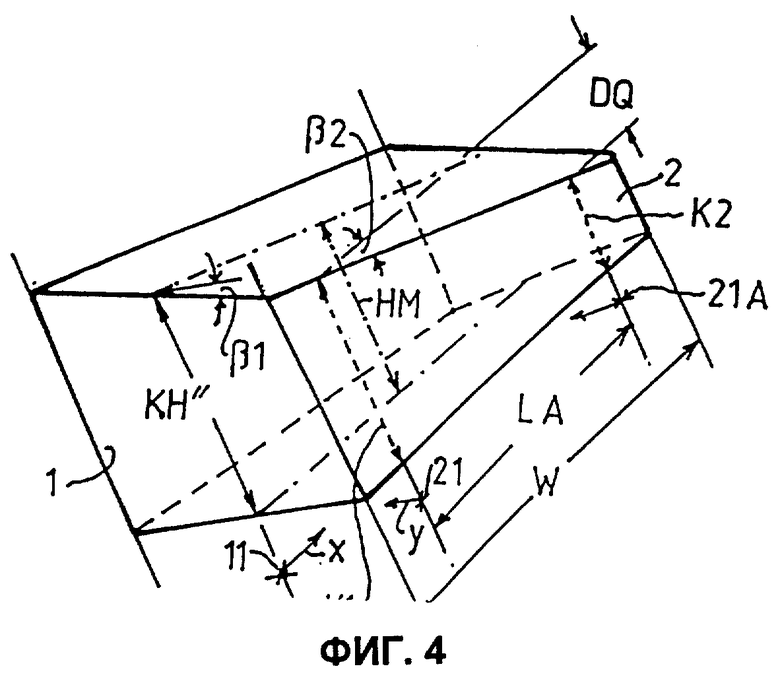
На фиг.4 показан объем зернового материала в транспортирующем канале с наклоном посредством поворота вокруг оси Y, проходящей параллельно обеим фотоячейкам 21, 21А. В этом случае определяемые обеими фотоячейками высотные положения К1, К2 кромки различны, а отношение их разности DQ к половине расстояния LA между ячейками определяет наклон β2. Соответственно максимальное боковое расстояние КН’ загрузки, измеренное фотоячейкой 11, следует откорректировать в соответствии с наклоном и уменьшить, чтобы получить среднее расстояние НМ загрузки. Это осуществляется в соответствии с зависимостью
НМ=КН’-(DQ×W)/(LA×2),
то есть в соответствии с разностью между боковым расстоянием КН’ загрузки и наклоном β2, умноженным на половину расстояния W.
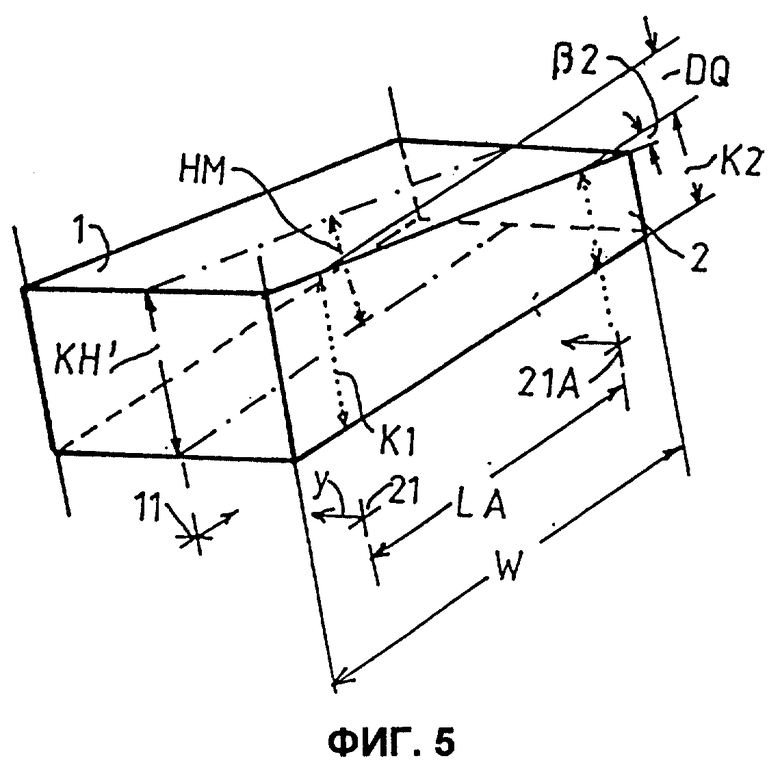
На фиг.5 показан объем зернового материала в транспортирующем канале, который имеет наклон с поворотом вокруг осей X, Y на углы β1, β2. Наклон β2 опять определяется как отношение разности DQ положений К1, К2 кромки у внутренней или наружной стенок 1, 2 к половине расстояния LA между фотоячейками. Очевидно, что среднее расстояние НМ загрузки определяется здесь также из бокового расстояния КН’’, измеренного фотоячейкой 11, посредством его уменьшения на наклон β2, отнесенный к половине расстояния W, и вычисляется по той же формуле НМ=КН’’-(DQ×W)/(LA×2). К схеме по фиг.3 применима та же формула, но корректирующий член уравнения в том случае равен нулю.
Очевидно, что подобный подход позволяет легко произвести нужную модификацию для определения объема при другом расположении фотоячеек, при наклонном положении ковша относительно транспортирующего канала и в случаях неполной загрузки ковшей.
Выбранное в данном примере исполнения расположение фотоячеек имеет преимущество почти синхронного восприятия ими поверхности, так что за относительно короткий промежуток времени начала всех трех темновых сигналов практически не происходит никакого смещения поверхности.
Очевидно далее, что также легко можно произвести вычисление среднего расстояния НМ загрузки с помощью получаемых извне сигналов наклона β1, β2 и сигнала КН" расстояния загрузки. Однако при этом следует учитывать проблемы возможных различных ускорений на датчике наклона и в зоне измерений в транспортирующем канале, а также задержку по времени изменения уровня зернового материала при изменениях вектора ускорения и при необходимости предусмотреть соответствующую корректировку.
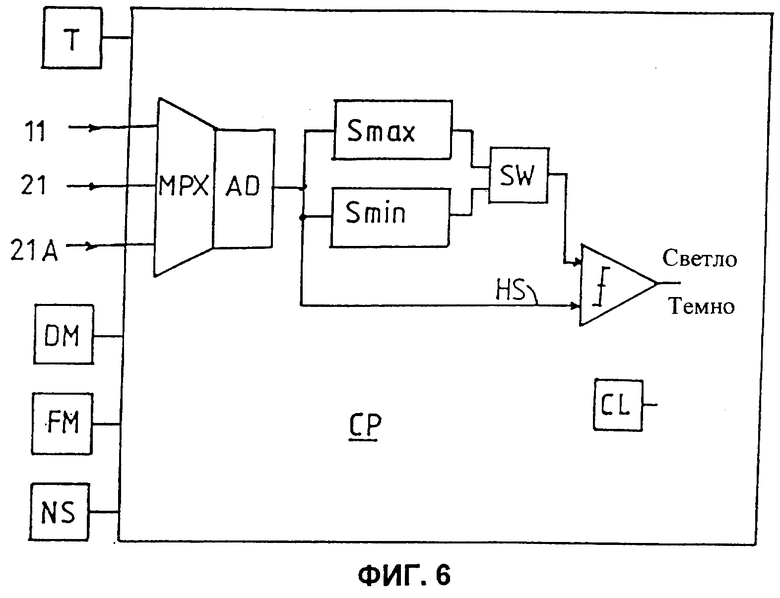
На фиг.6 представлена блок-схема устройства, которое состоит из программируемого процессора СР, на вход которого подаются сигналы датчиков фотоячеек 21, 21А, 11 и, кроме того, требуемые данные перегружаемого материала, такие как удельный вес, влажность, вид зерновой культуры. Это может осуществляться известным образом с помощью линии ввода данных, коммуникационного устройства, клавиатуры или посредством измерительных датчиков, в частности прибора DM для измерения плотности, и прибора FM для измерения влажности.
Вводимые сигналы от фотоячеек подвергаются численной оценке и анализу с помощью тактовых сигналов датчика CL тактовых импульсов в отношении длительности их световых и темновых фаз и/или их относительной последовательности во времени и длительности по отношению друг к другу. Далее, как уже указывалось, эти данные пересчитываются вместе с заложенными в памяти геометрическими данными транспортирующего канала и измеренными величинами плотности и влажности в количественные величины потока и суммарные количественные величины в расчете на более продолжительное время транспортирования и непрерывно либо сохраняются в состоянии готовности или выдаются для дальнейшего установления величин урожайности площади и составления карт урожайности, либо подаются на индикатор для оператора.
В тех случаях, когда имеется меньше фотоячеек, чем три указанные, ко входу процессора подсоединяется по меньшей мере один датчик NS ускорения/наклона, сигнал от которого используется описанным образом для корректировки измерений высоты слоя зернового материала и вычислений объема. При этом возникает проблема допусков угла естественного откоса, которые привносят неточность и погрешности в величины объема. Эти погрешности успешно снижают с помощью корректирующих величин, которые получены с помощью измерительной техники или эмпирически и заложены в памяти в виде таблиц или функций в зависимости от вида зерновой культуры и ее относительной влажности.
В тех случаях, когда устройство в представленном на фиг.6 виде оснащено по меньшей мере тремя фотоячейками 11, 21, 21А и, кроме того, еще по меньшей мере одним датчиком NS наклона, определяющим наклон в направлении фотоячеек, имеется возможность получения корректирующих величин при различных условиях, в частности уточнения величины наклона после его изменения. Эта возможность обеспечивается за счет сравнения результатов определения объема по сигналам нескольких фотоячеек 11, 21, 21А и результатов определения объема по сигналам одной фотоячейки 11 и датчика NS наклона. Указанные корректирующие величины могут быть представлены в виде таблиц или функций и заложены для использования в более простых устройствах, содержащих меньшее число фотоячеек и один датчик NS наклона.
Сигналы от фотоячеек непосредственно в аналоговом виде подаются в аналого-цифровой преобразователь AD и получают цифровую оценку, при этом через мультиплексор МРХ периодически производится считывание множества сигналов. Для обеспечения максимально высокой точности определения времени прохождения кромок ковшей и границ зернового материала от отдельных фотоячеек непрерывно поступают данные максимальных и минимальных величин светового сигнала. По средней между ними величине для отдельной фотоячейки определяется пороговая величина, при которой происходит переход сигнала фотоячейки от темнового к световому и обратно, и фиксируется момент времени этого перехода. Разумеется, выработка пороговой величины и сравнение с пороговой величиной может осуществляться также и в аналоговой области, и вырабатываемый в компараторе цифровой сигнал подается к цифровому вводу устройства обработки данных. Обработка сигнала схематично представлена на примере одного сигнала. При этом обозначены: последняя максимальная величина - Smax, последняя минимальная величина - Smin, и полученная по ним пороговая величина - SW. Пороговая величина через короткие промежутки сравнивается с величиной HS светового состояния, и по результатам сравнения определяется состояние светового или темнового интервала.
Альтернативно или в дополнение к центральной фотоячейке 11 могут быть предусмотрены также две параллельные фотоячейки 11А, 11В, как показано на фиг.1. Их сигналы могут использоваться посредством усреднения таким же образом, как сигнал одной фотоячейки. Кроме того, с их помощью можно измерять прохождение нижней кромки ковша и определять ее наклон, когда желательно определять малый объем в неполном ковше. Если система фотоячеек выполнена с двумя парами фотоячеек 11А, 11В; 21, 21А, то избыточность четырех дистанционных сигналов дает благоприятную возможность производить двойное определение объема и выводить средний результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ДАННЫХ О МАССЕ СХОДА С РЕШЕТА ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2004 |
|
RU2350067C2 |
| УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ И ОПРЕДЕЛЕНИЯ СОСТАВА СЫПУЧЕГО МАТЕРИАЛА | 2011 |
|
RU2566989C2 |
| КОВШОВЫЙ ЭЛЕВАТОР (НОРИЯ) ДЛЯ СЫПУЧИХ МАТЕРИАЛОВ | 2020 |
|
RU2737177C1 |
| СПОСОБ КОНТРОЛЯ ТРАНСПОРТИРОВКИ БАНКНОТ | 2011 |
|
RU2562766C2 |
| ЗЕРНОУБОРОЧНЫЙ КОМБАЙН | 2011 |
|
RU2572310C2 |
| Оптоэлектронное запоминающее устройство | 1977 |
|
SU737990A1 |
| Ковшовый элеватор | 1988 |
|
SU1661085A1 |
| ОПТИЧЕСКИЙ УРОВНЕМЕР ЖИДКОСТИ | 1999 |
|
RU2159411C1 |
| КОВШОВЫЙ ЭЛЕВАТОР | 2017 |
|
RU2664610C1 |
| УСТРОЙСТВО ДЛЯ УПАКОВКИ КОЛБАС, ПРЕДНАЗНАЧЕННОЕ ДЛЯ ЗАПОЛНЕНИЯ ПАСТООБРАЗНЫМ НАПОЛНИТЕЛЕМ ТРУБЧАТОЙ ОБОЛОЧКИ | 2004 |
|
RU2340194C2 |
Устройство, в транспортирующем канале которого непрерывно движутся транспортирующие ковши, загруженные транспортируемым материалом, в частности зерновыми культурами, содержащее фотоячейку, расположенную на транспортирующем канале поперечно ему. Световой пучок фотоячейки ориентирован по существу параллельно поверхностям ковшей. Устройство также включает процессор сигналов для определения в транспортирующих ковшах расстояния до кромки транспортируемого материала с учетом расстояния между транспортирующими ковшами и толщины ковшей, и для определения из этой величины и поперечного сечения транспортирующего канала объема транспортируемого материала. К процессору сигналов подсоединены дополнительные измерительные средства для определения наклона и/или конфигурации поверхности транспортируемого материала. Обеспечивается более высокая точность измерения. 10 з.п. ф-лы. 6 ил.
| DE 3045728 A1, 08.07.1982 | |||
| DE 19522441 A1, 02.01.1997 | |||
| СПОСОБ ФОРМИРОВАНИЯ ПОТОКА КРОВИ В ХИРУРГИЧЕСКИ РЕКОНСТРУИРУЕМЫХ СЕГМЕНТАХ СИСТЕМЫ КРОВООБРАЩЕНИЯ И УСТРОЙСТВА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2445046C2 |
| Устройство для определения производительности зерноуборочной машины | 1981 |
|
SU948323A1 |

