Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству отображения транспортного средства, которое отображает информацию в транспортном средстве.
Уровень техники
[0002] В качестве традиционного устройства отображения транспортного средства известно устройство отображения на лобовом стекле (HUD) для дисплея в стиле дополненной реальности (AR), который отображает изображение способом наложения на внешний вид перед ветровым стеклом (см. патентный документ 1). Дисплей на лобовом стекле отображает монетовидные значки способом наложения на передний вид в направлении движения на дороге, по которой движется транспортное средство.
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2013-196359
Сущность изобретения
Техническая задача
[0004] В патентном документе 1, дисплей на лобовом стекле используется в комбинации с навигационным устройством, датчиком состояния транспортного средства, внешним датчиком, устройством связи транспортного средства и т.п., чтобы отображать изображения способом наложения на требующие внимания цели, такие как, например, дорожные знаки и знаки на поверхности дороги. Тем не менее, патентный документ 1 имеет такую проблему, что когда имеется объект около требующей внимания цели, и отображаемое изображение перекрывает этот объект, отображаемое изображение трудно читать.
[0005] Предмет задачи заключается в том, чтобы предоставлять устройство отображения транспортного средства, которое обеспечивает возможность простого чтения отображения, даже когда отображение выполняется поверх объекта.
[0006] В устройстве отображения транспортного средства согласно настоящему изобретению, модуль определения расположенных впереди объектов определяет объект на поверхности проезжей дороги впереди рассматриваемого транспортного средства на основе изображения переднего вида, захваченного посредством камеры переднего вида. Контроллер отображения рисует перекрывающийся участок, на котором маршрут навигации, вычисленный посредством навигационного устройства, и объект, определенный посредством модуля определения расположенных впереди объектов, перекрывают друг друга в области отображения на ветровом стекле, и неперекрывающийся участок, на котором маршрут навигации и объект не перекрывают друг друга в области отображения на ветровом стекле таким образом, что перекрывающийся участок должен представляться в режиме, отличающемся от режима для неперекрывающегося участка.
Краткое описание чертежей
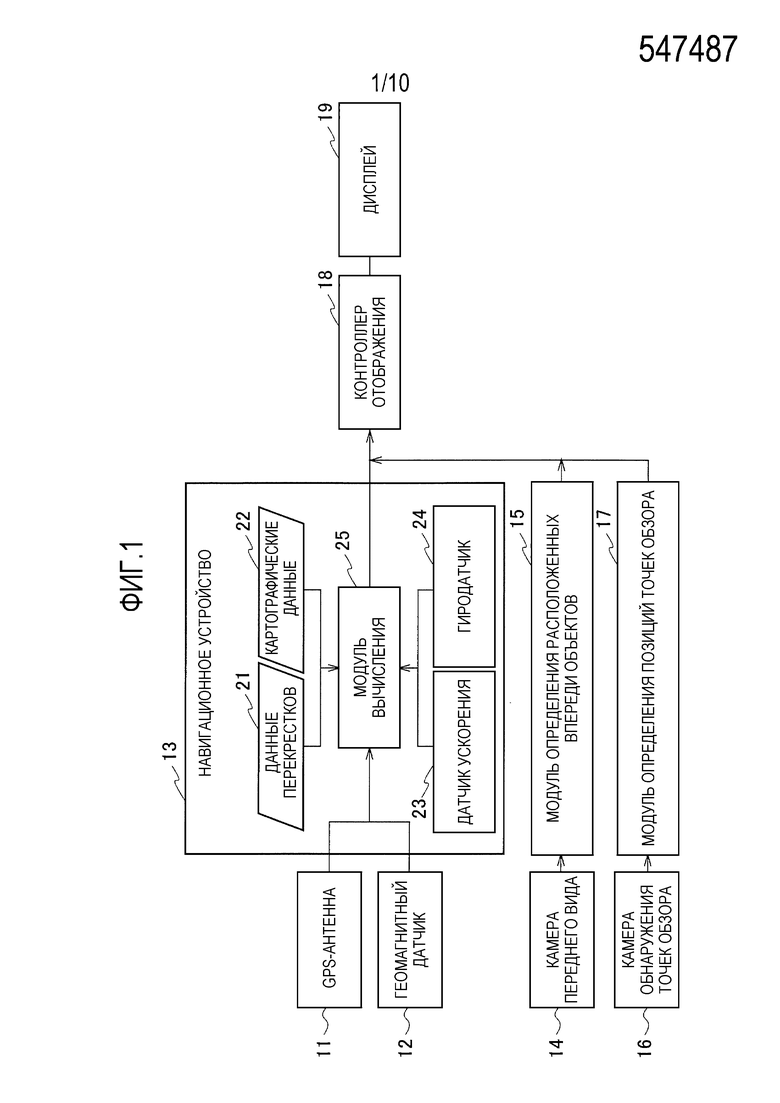
[0007] Фиг. 1 является схемой, иллюстрирующей конфигурацию устройства отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения.
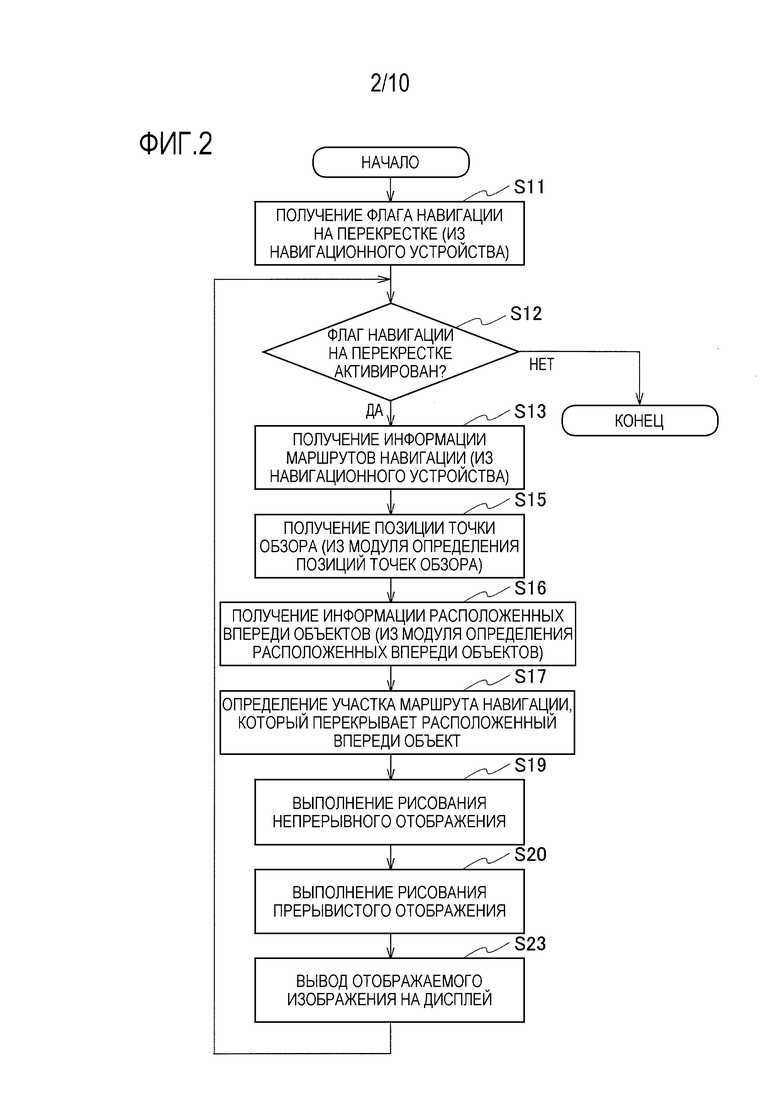
Фиг. 2 является блок-схемой последовательности операций способа для пояснения работы устройства отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения.
Фиг. 3 является видом для пояснения состояния, в котором маршрут навигации и объект перекрывают друг друга в устройстве отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения.
Фиг. 4 является видом, иллюстрирующим пример, в котором маршрут навигации на участке, на котором маршрут навигации и объект перекрывают друг друга в области отображения на ветровом стекле, отображается посредством использования непрерывной линии в устройстве отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения.
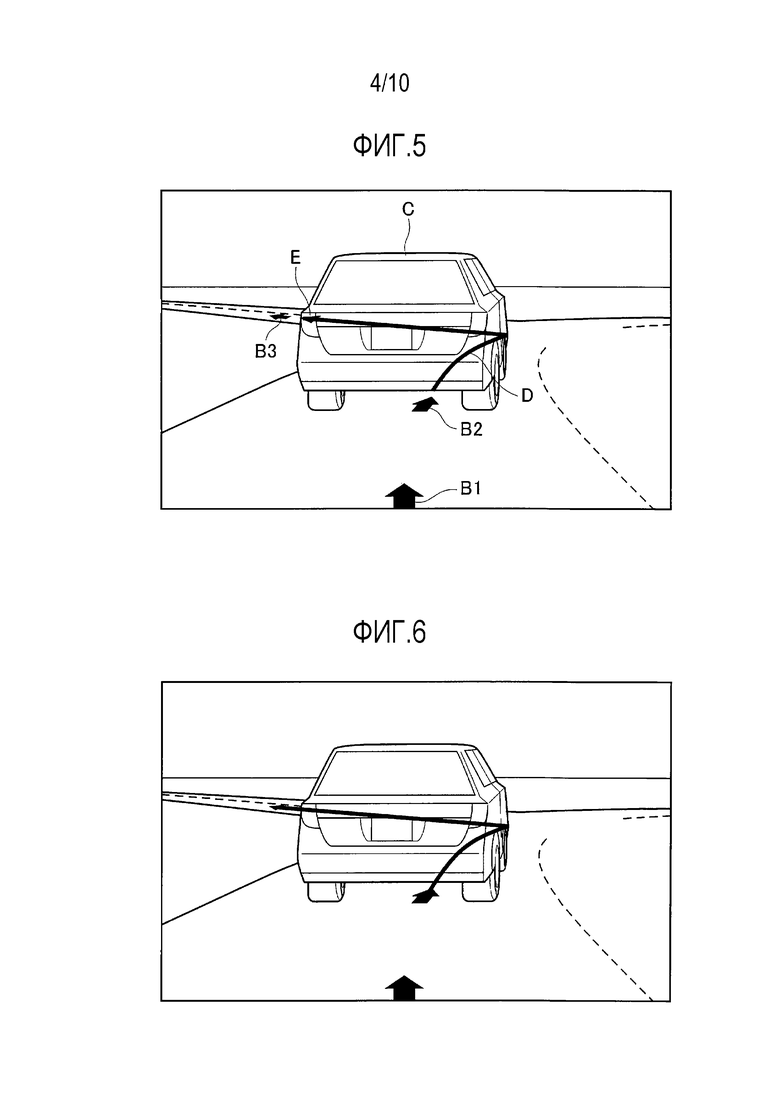
Фиг. 5 является видом, иллюстрирующим пример, в котором маршрут навигации на участке, на котором маршрут навигации и объект перекрывают друг друга в области отображения на ветровом стекле, отображается посредством использования непрерывной линии со стрелкой на переднем конце в устройстве отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения.
Фиг. 6 является видом, иллюстрирующим пример, в котором маршрут навигации на участке, на котором маршрут навигации и объект перекрывают друг друга в области отображения на ветровом стекле, отображается посредством использования продленной непрерывной линии в устройстве отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения.
Фиг. 7 является видом, иллюстрирующим пример, в котором маршрут навигации на участке, на котором маршрут навигации и объект перекрывают друг друга в области отображения на ветровом стекле, отображается посредством использования комбинации непрерывной линии и прерывистых стрелок в устройстве отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения.
Фиг. 8 является видом, иллюстрирующим пример, в котором маршрут навигации на участке, на котором маршрут навигации и объект перекрывают друг друга в области отображения на ветровом стекле, отображается посредством использования прерывистых линий, размещаемых с меньшими интервалами в устройстве отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения.
Фиг. 9 является видом, иллюстрирующим пример, в котором маршрут навигации на участке, на котором маршрут навигации и объект перекрывают друг друга в области отображения на ветровом стекле, отображается посредством использования прерывистых стрелок, формы и размеры которых изменяются в устройстве отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения.
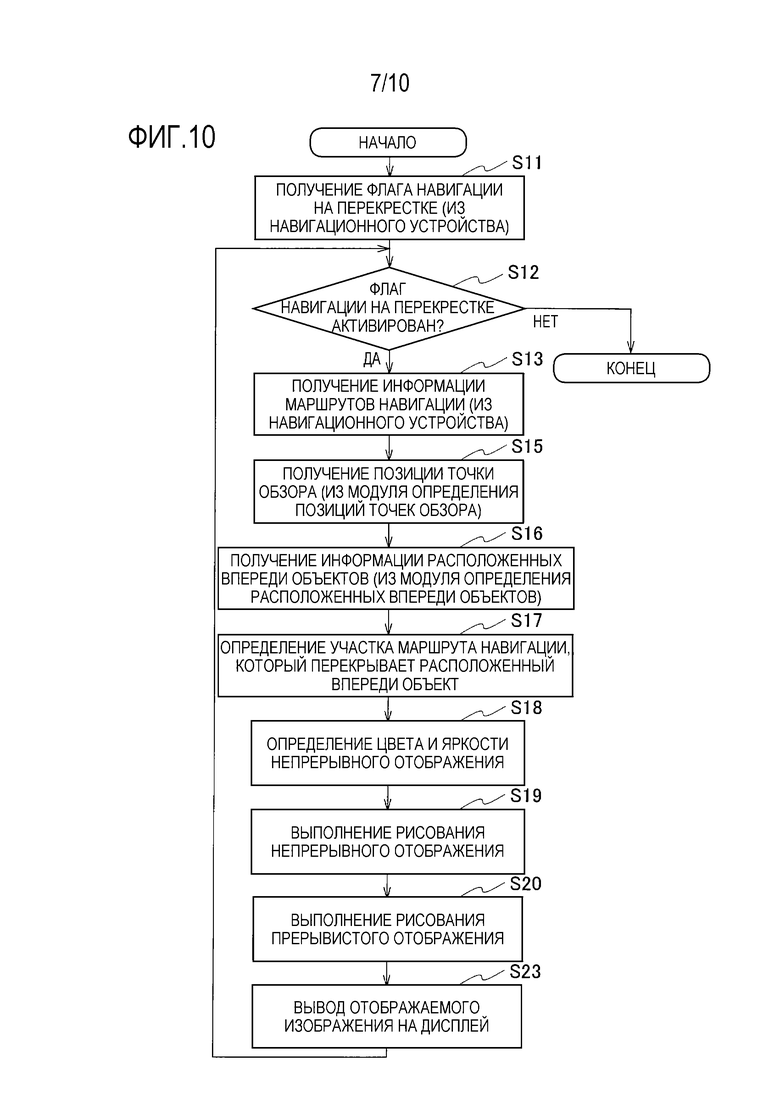
Фиг. 10 является блок-схемой последовательности операций способа для пояснения работы устройства отображения транспортного средства согласно варианту 2 осуществления настоящего изобретения.
Фиг. 11 является видом, иллюстрирующим пример, в котором цвет и яркость маршрута навигации на участке, на котором маршрут навигации и объект перекрывают друг друга в области отображения на ветровом стекле, изменяются и отображаются в устройстве отображения транспортного средства согласно варианту 2 осуществления настоящего изобретения.
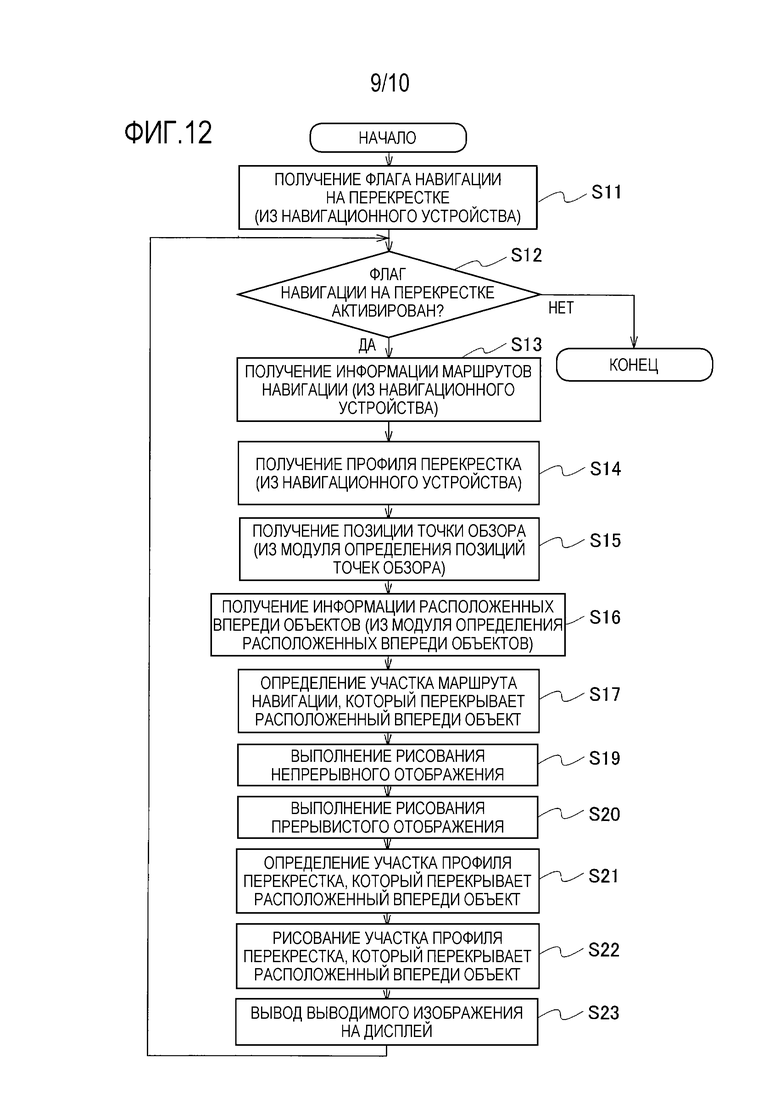
Фиг. 12 является блок-схемой последовательности операций способа для пояснения работы устройства отображения транспортного средства согласно варианту 3 осуществления настоящего изобретения.
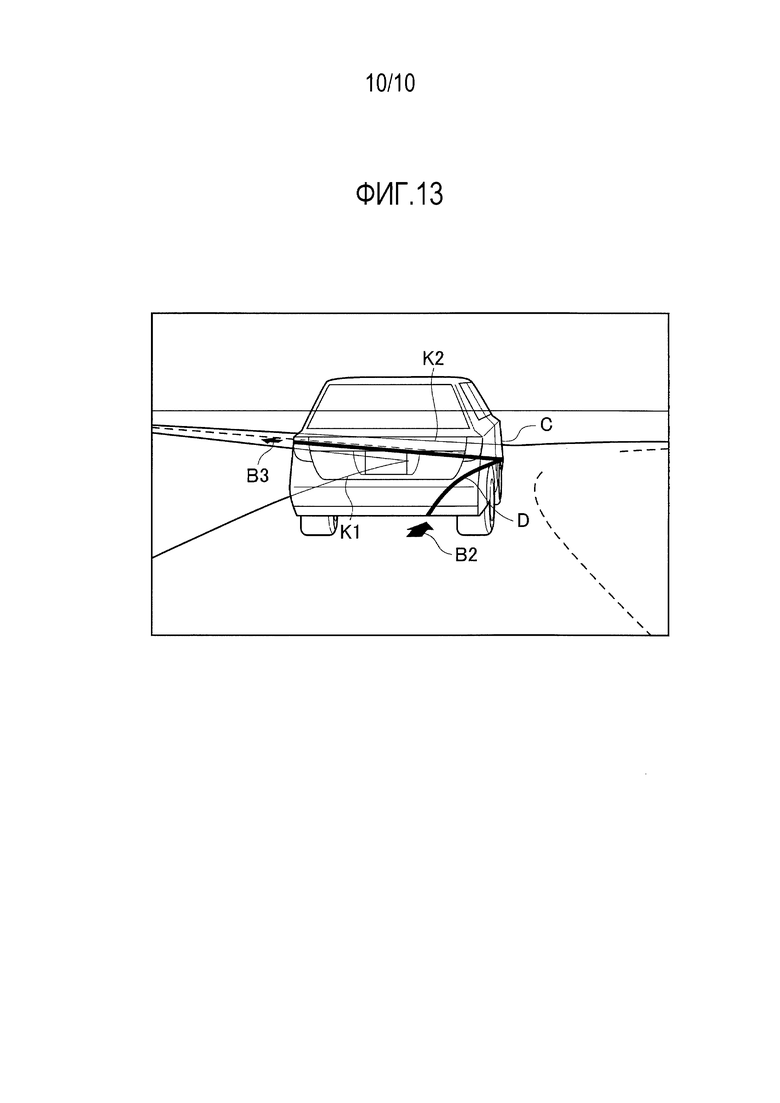
Фиг. 13 является видом, иллюстрирующим пример, в котором участок, на котором маршрут навигации и объект перекрывают друг друга в области отображения на переднем окне, отображается, как если водитель смотрит через объект в устройстве отображения транспортного средства согласно варианту 3 осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0008] Ниже подробно описывается устройство отображения транспортного средства согласно вариантам осуществления настоящего изобретения со ссылкой на чертежи.
[0009] Первый вариант осуществления
Фиг. 1 является схемой, иллюстрирующей конфигурацию устройства отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения. Устройство отображения транспортного средства отображает маршрут навигации в пункт назначения рассматриваемого транспортного средства. Устройство отображения транспортного средства включает в себя антенну 11 по стандарту GPS (глобальной системы позиционирования), геомагнитный датчик 12, навигационное устройство 13, камеру 14 переднего вида и модуль 15 определения расположенных впереди объектов. Устройство отображения транспортного средства дополнительно включает в себя камеру 16 обнаружения точек обзора, модуль 17 определения позиций точек обзора, контроллер 18 отображения и дисплей 19.
[0010] GPS-антенна 11 принимает GPS-сигналы из не проиллюстрированных GPS-спутников и выводит принимаемые GPS-сигналы в навигационное устройство 13 в качестве GPS-информации. Геомагнитный датчик 12 определяет азимут направления, в котором обращено транспортное средство (азимут направления движения транспортного средства), и выводит определенный азимут в навигационное устройство 13 в качестве информации азимута.
[0011] Навигационное устройство 13 вычисляет маршрут навигации, по которому должно двигаться рассматриваемое транспортное средство согласно инструкциям по навигации, посредством использования GPS-информации из GPS-антенны 11, информации азимута из геомагнитного датчика 12 и информации, полученной как таковой, и выводит маршрут навигации в контроллер 18 отображения. Навигационное устройство 13 извлекает форму перекрестка впереди рассматриваемого транспортного средства на основе картографических данных 22 и текущей позиции рассматриваемого транспортного средства, указываемой посредством GPS-информации из GPS-антенны 11. Навигационное устройство 13 формирует информацию профилей перекрестков, указывающую форму извлеченного перекрестка, и выводит информацию профилей перекрестков в контроллер 18 отображения. Ниже описываются подробности навигационного устройства 13.
[0012] Камера 14 переднего вида захватывает изображение переднего вида впереди рассматриваемого транспортного средства и выводит захваченное изображение переднего вида в модуль 15 определения расположенных впереди объектов в качестве информации изображений участка спереди.
[0013] Модуль 15 определения расположенных впереди объектов определяет объект на проезжей дороге впереди рассматриваемого транспортного средства на основе информации изображений участка спереди, отправленной из камеры 14 переднего вида, и выводит результат определения в контроллер 18 отображения в качестве информации объектов.
[0014] Камера 16 обнаружения точек обзора захватывает изображение, включающее в себя позиции глаз водителя, и выводит захваченное изображение в модуль 17 определения позиций точек обзора в качестве информации изображений точек обзора.
[0015] Модуль 17 определения позиций точек обзора определяет позицию точки обзора водителя на основе информации изображений точек обзора, отправленной из камеры 16 обнаружения точек обзора, и выводит результат определения в контроллер 18 отображения в качестве информации позиций точек обзора.
[0016] Контроллер 18 отображения принимает информацию маршрутов навигации и информацию профилей перекрестков, отправленную из навигационного устройства 13, информацию объектов, отправленную из модуля 15 определения расположенных впереди объектов, и информацию позиций точек обзора, отправленную из модуля 17 определения позиций точек обзора. Контроллер 18 отображения формирует изображение, которое должно отображаться на дисплее 19, на основе информации маршрутов навигации, информации профилей перекрестков, информации объектов и информации позиций точек обзора и выводит сформированное изображение на дисплей 19 в качестве информации выводимых изображений. Контроллер 18 отображения рисует маршрут навигации, вычисленный посредством навигационного устройства 13 таким образом, что участок, на котором маршрут навигации и объект, определенный посредством модуля 15 определения расположенных впереди объектов, перекрывают друг друга в области отображения на ветровом стекле, представляется в режиме, отличающемся от режима для участка, на котором маршрут навигации и объект не перекрывают друг друга в области отображения на ветровом стекле, и выводит изображение на дисплей 19 в качестве информации выводимых изображений.
[0017] Дисплей 19 включает в себя модуль проецирования, который проецирует видео, экран и зеркало Френеля, которые отражают видео и т.п., и отображает изображение в области отображения, предоставленной таким образом, что она перекрывает позицию ветрового стекла, включенного в транспортное средство. В частности, дисплей 19 представляет собой дисплей на лобовом стекле, который может отображать изображение способом наложения на передний вид впереди транспортного средства посредством отображения изображения, отражаемого посредством зеркала, на ближней стороне ветрового стекла в качестве виртуального изображения. Тем не менее, дисплей 19 не ограничен этим типом дисплея на лобовом стекле. Например, дисплей 19 может представлять собой комбинированный дисплей на лобовом стекле с использованием прозрачной панели вместо отображения изображения на ветровом стекле либо может использовать способ прямого отображения изображения на ветровом стекле. Другими словами, дисплей на лобовом стекле в варианте осуществления может представлять собой любой тип при условии, что водитель видит информацию, отображаемую посредством дисплея на лобовом стекле способом наложения на вид, наблюдаемый водителем из ветрового стекла, не смотря вниз. Следует отметить, что дисплей 19 соответствует дисплею по п. 1.
[0018] Далее описываются подробности вышеуказанного навигационного устройства 13. Навигационное устройство 13 включает в себя данные 21 перекрестков, картографические данные 22, датчик 23 ускорения, гиродатчик 24 и модуль 25 вычисления.
[0019] Данные 21 перекрестков являются данными, указывающими характеристики и т.п. каждого перекрестка, и получаются, например, из дискового устройства или центра через линию связи и устройство связи (оба не проиллюстрированы). Данные перекрестков считываются посредством модуля 25 вычисления.
[0020] Картографические данные 22 являются данными, полученными, например, из дискового устройства или центра через линию связи и устройство связи, к примеру, данными 21 перекрестков, и используются для рисования карты, вычисления маршрута навигации, формирования информации маршрутов навигации и т.п. Картографические данные 22 считываются посредством модуля 25 вычисления.
[0021] Датчик 23 ускорения определяет ускорение рассматриваемого транспортного средства и выводит определенное ускорение в модуль 25 вычисления в качестве информации ускорения.
[0022] Гиродатчик 24 определяет угловую скорость рассматриваемого транспортного средства и выводит определенную угловую скорость в модуль 25 вычисления в качестве информации угловой скорости.
[0023] Модуль 25 вычисления вычисляет текущую позицию рассматриваемого транспортного средства посредством использования картографических данных 22 и GPS-информации, отправленной из GPS-антенны 11. При вычислении, транспортное средство иногда не может принимать GPS-сигналы при движении, например, в туннеле, под эстакадной дорогой или между высокими зданиями. Соответственно, модуль 25 вычисления вычисляет текущую позицию посредством автономной навигации на основе картографических данных 22, информации азимута из геомагнитного датчика 12, информации ускорения из датчика 23 ускорения и информации угловой скорости из гиродатчика 24. Модуль 25 вычисления выводит информацию инструкций по навигации, созданную на основе вычисленной текущей позиции, в контроллер 18 отображения.
[0024] Далее описывается работа устройства отображения транспортного средства согласно варианту 1 осуществления настоящего изобретения, сконфигурированного так, как описано выше, со ссылкой на блок-схему последовательности операций способа, проиллюстрированную на фиг. 2.
[0025] Когда работа начинается, сначала получается флаг навигации на перекрестке (этап S11). В частности, контроллер 18 отображения получает флаг навигации на перекрестке из навигационного устройства 13. Здесь, флаг навигации на перекрестке представляет собой флаг, указывающий то, должна или нет выполняться навигация по маршруту и т.п. на перекрестке, и навигация по маршруту и т.п. выполняется на перекрестке только тогда, когда флаг навигации на перекрестке активирован.
[0026] Далее проверяется то, активирован или нет флаг навигации на перекрестке (этап S12). В частности, контроллер 18 отображения проверяет то, активирован или нет флаг навигации на перекрестке, полученный на этапе S11. Когда флаг навигации на перекрестке не активирован на этапе S12, контроллер 18 отображения определяет то, что навигация на перекрестке является необязательной, и обработка завершается.
[0027] Между тем, когда на этапе S12 определяется то, что флаг навигации на перекрестке активирован, после этого получается информация маршрутов навигации (этап S13). В частности, контроллер 18 отображения получает информацию маршрутов навигации из навигационного устройства 13. Информация маршрутов навигации вычисляется заранее и сохраняется в навигационном устройстве 13.
[0028] Далее получается позиция точки обзора (этап S15). В частности, контроллер 18 отображения получает информацию позиций точек обзора из модуля 17 определения позиций точек обзора.
[0029] Далее получается информация относительно объекта впереди рассматриваемого транспортного средства (этап S16). В частности, контроллер 18 отображения получает информацию объектов, полученную посредством определения объекта около требующей внимания цели и впереди рассматриваемого транспортного средства, из модуля 15 определения расположенных впереди объектов.
[0030] Далее определяется участок маршрута навигации, который перекрывает объект в передней части транспортного средства (этап S17). В частности, контроллер 18 отображения определяет участок, на котором объект, указываемый посредством информации объектов, полученной из модуля 15 определения расположенных впереди объектов, и маршрут навигации, указываемый посредством информации маршрутов навигации, полученной из навигационного устройства 13, перекрывают друг друга в области отображения на ветровом стекле. Например, в общем примере, проиллюстрированном на фиг. 3, определятся то, что три прерывистых стрелки A1, A2 и A3, указывающие маршрут навигации, перекрывают объект C (транспортное средство в этом примере) в области отображения на ветровом стекле. Следует отметить, что три прерывистых стрелки B1, B2 и B3, указывающие маршрут навигации, представляют собой участки, не перекрывающие транспортное средство C в области отображения на ветровом стекле. Кроме того, примеры объекта C включают в себя человека, другие объекты трафика, помехи и т.п.
[0031] Далее выполняется рисование непрерывного отображения (этап S19). В частности, как проиллюстрировано на фиг. 4, контроллер 18 отображения рисует маршрут навигации на участке, на котором маршрут навигации, определенный на этапе S17, и объект C перекрывают друг друга в области отображения на ветровом стекле, посредством использования непрерывной фигуры, в частности, непрерывной линии D.
[0032] Далее выполняется рисование прерывистого отображения (этап S20). В частности, как проиллюстрировано на фиг. 4, контроллер 18 отображения рисует маршрут навигации на участке, на котором маршрут навигации, определенный на этапе S17, и объект C не перекрывают друг друга в области отображения на ветровом стекле, посредством использования прерывистой фигуры, в частности, прерывистых стрелок B1, B2 и B3.
[0033] После этого, выводимое изображение выводится на дисплей 19 (этап S23). В частности, контроллер 18 отображения выводит изображения, нарисованные на этапе S19 и этапе 20, на дисплей 19 в качестве информации выводимых изображений.
[0034] Дисплей 19 за счет этого формирует изображение на основе информации выводимых изображений из контроллера 18 отображения и проецирует изображение на ветровое стекло, чтобы отображать изображение непосредственно в поле зрения человека. После этого, последовательность возвращается к этапу S12, и вышеуказанные процессы повторяются.
[0035] В устройстве отображения транспортного средства согласно варианту 1 осуществления, контроллер 18 отображения рисует маршрут навигации на участке, на котором маршрут навигации и объект C, определенный посредством модуля 15 определения расположенных впереди объектов, перекрывают друг друга, посредством использования непрерывной линии D и рисует маршрут навигации на участках, на которых маршрут навигации и объект C не перекрывают друг друга, посредством использования прерывистых стрелок B1, B2 и B3 в области отображения на ветровом стекле. Дисплей 19 отображает изображение, нарисованное посредством контроллера 18 отображения. Соответственно, водитель может легко читать отображаемое изображение, даже когда отображение выполняется поверх объекта около требующей внимания цели (маршрута навигации, дорожного знака, знака на поверхности дороги).
[0036] Кроме того, когда весь маршрут навигации отображается посредством использования непрерывной фигуры, объем вычислений для отображения является большим. Тем не менее, объем вычислений может уменьшаться посредством ограничения непрерывного отображения участком, перекрывающим объект C. Соответственно, вычислительный ресурс, который может выделяться другому отображению, может увеличиваться.
[0037] Следует отметить, что как проиллюстрировано на фиг. 5, рисование может выполняться таким образом, что стрелка E, указывающая направление движения, добавляется к переднему концу непрерывной линии D. Это проясняет направление, в котором рассматриваемое транспортное средство должно двигаться на перекрестке.
[0038] Кроме того, как проиллюстрировано на фиг. 6, рисование может выполняться таким образом, что оба конца D1 и D2 непрерывной линии D продлеваются в прерывистые стрелки B2 и B3 за рамками контура объекта C. Это позволяет увеличивать заметность маршрута навигации, нарисованного посредством непрерывной линии D и прерывистых стрелок B2 и B3.
[0039] Кроме того, как проиллюстрировано на фиг. 7, непрерывная линия F и прерывистые стрелки G1, G2 и G3 могут отображаться в комбинации. В этом случае, рисование предпочтительно выполняется таким образом, что цвет непрерывной линии F отличается от цвета прерывистых стрелок G1, G2 и G3. В этой конфигурации, поскольку непрерывная линия D, как проиллюстрировано на фиг. 4, рисуется в дополнение к прерывистым стрелкам A1, A2 и A3, как проиллюстрировано на фиг. 3, маршрут навигации выделяется, и его распознавание упрощается.
[0040] Кроме того, как проиллюстрировано на фиг. 8, отображение может выполняться таким образом, что прерывистые стрелки H1-H12 рисуются с меньшими интервалами, чем интервалы (предварительно определенные интервалы) между стрелками A1, A2 и A3 (составляющими элементами) в общем примере, проиллюстрированном на фиг. 3. Альтернативно, отображение может выполняться таким образом, что число стрелок (составляющих элементов) увеличивается относительно числа (предварительно определенного числа) стрелок A1, A2 и A3 (составляющих элементов) в общем примере, проиллюстрированном на фиг. 3. В этой конфигурации, проще распознавать маршрут навигации, чем в случае, если маршрут навигации рисуется посредством использования только линии.
[0041] Кроме того, как проиллюстрировано на фиг. 9, отображение может выполняться таким образом, что прерывистая фигура, в частности, прерывистые стрелки I1, I2 и I3 отображаются с изменением, по меньшей мере, одного из форм или размеров стрелок I1, I2 и I3. В этой конфигурации, маршрут навигации становится более заметным, и проще распознавать направление, в котором должно двигаться транспортное средство, чем в случае, если маршрут навигации рисуется посредством использования только линии.
[0042] Второй вариант осуществления
Конфигурация устройства отображения транспортного средства согласно варианту 2 осуществления настоящего изобретения является идентичной конфигурации устройства отображения транспортного средства согласно варианту 1 осуществления, проиллюстрированного на фиг. 1, и только его работа отличается. Соответственно, ниже главным образом приводится описание работы.
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей работу устройства отображения транспортного средства согласно варианту 2 осуществления настоящего изобретения. Следует отметить, что в нижеприведенном описании, этапы, на которых выполняются процессы, идентичные процессам устройстве отображения транспортного средства согласно варианту 1 осуществления, обозначаются посредством ссылок с номерами, идентичных ссылкам с номерами для этапов процессов в устройстве отображения транспортного средства согласно варианту 1 осуществления, проиллюстрированном на фиг. 2, и их описание опускается.
[0043] Поскольку процессы на этапах S11-S17 являются идентичными процессам, проиллюстрированным на фиг. 2, их описание опускается в данном документе.
[0044] После процесса этапа S17, определяются цвет и яркость непрерывного отображения (этап S18). В частности, контроллер 18 отображения определяет цвет и яркость непрерывной фигуры, в частности, непрерывной линии, которая должна использоваться при рисовании непрерывного отображения, выполняемом на следующем этапе S19.
[0045] Далее выполняется рисование непрерывного отображения (этап S19). В частности, контроллер 18 отображения рисует маршрут навигации на участке, на котором маршрут навигации, определенный на этапе S17, и объект (транспортное средство) перекрывают друг друга в области отображения на ветровом стекле, посредством использования непрерывной фигуры, в частности, непрерывной линии с цветом и яркостью, определенными на этапе S18. Далее выполняется рисование прерывистого отображения (этап S20).
[0046] Далее выводимое изображение выводится на дисплей 19 (этап S23). После этого, последовательность возвращается к этапу S12, и вышеуказанные процессы повторяются.
[0047] Как описано выше, устройство отображения транспортного средства согласно варианту 2 осуществления настоящего изобретения рисует маршрут навигации на участке, на котором маршрут навигации, вычисленный посредством навигационного устройства 13, и объект, определенный посредством модуля 15 определения расположенных впереди объектов, перекрывают друг друга в области отображения на ветровом стекле, посредством использования непрерывной линии, выделенной посредством изменения цвета и яркости. Соответственно, как проиллюстрировано на фиг. 11, цвет участка J, на котором маршрут навигации и едущий впереди объект C перекрывают друг друга в области отображения на ветровом стекле, может изменяться, в зависимости от цвета объекта C, на дополнительный цвет фона, или перекрывающийся участок J может становиться более ярким, когда фон является ярким. Таким образом, отображаемое изображение может становиться более заметным.
[0048] Следует отметить, что, хотя устройство отображения транспортного средства выполнено с возможностью изменять цвет и яркость непрерывной линии, используемой для того, чтобы рисовать маршрут навигации на участке, на котором маршрут навигации и объект (транспортное средство) перекрывают друг друга в области отображения на ветровом стекле в вышеуказанном варианте осуществления 2, устройство отображения транспортного средства может быть выполнено с возможностью изменять, по меньшей мере, одно из цвета и яркости.
[0049] Третий вариант осуществления
Конфигурация устройства отображения транспортного средства согласно варианту 3 осуществления настоящего изобретения является идентичной конфигурации устройства отображения транспортного средства согласно варианту 1 осуществления, проиллюстрированного на фиг. 1, и только его работа отличается. Соответственно, ниже главным образом приводится описание работы.
[0050] Фиг. 12 является блок-схемой последовательности операций способа, иллюстрирующей работу устройства отображения транспортного средства согласно варианту 3 осуществления настоящего изобретения. Следует отметить, что в нижеприведенном описании, этапы, на которых выполняются процессы, идентичные процессам устройстве отображения транспортного средства согласно варианту 1 осуществления, обозначаются посредством ссылок с номерами, идентичных ссылкам с номерами для этапов процессов в устройстве отображения транспортного средства согласно варианту 1 осуществления, проиллюстрированном на фиг. 2, и их описание упрощается.
[0051] Поскольку процессы на этапах S11-S19 являются идентичными процессам, проиллюстрированным на фиг. 2, их описание опускается в данном документе.
[0052] После процесса этапа S19, выполняется рисование прерывистого отображения (этап S20). Далее определяется участок, на котором профиль перекрестка и объекта в передней части транспортного средства перекрывают друг друга в области отображения на переднем ветровом стекле (этап S21). В частности, контроллер 18 отображения определяет участок, на котором профиль перекрестка, указываемый посредством информации профилей перекрестков, полученной на этапе S14, и форма объекта, полученная на этапе S16, перекрывают друг друга.
[0053] Далее рисуется участок профиля перекрестка, который перекрывает объект в передней части транспортного средства (этап S22). В частности, контроллер 18 отображения рисует профиль перекрестка, определенный на этапе S21. Далее выводимое изображение выводится на дисплей 19 (этап S23). После этого, последовательность возвращается к этапу S12, и вышеуказанные процессы повторяются.
[0054] Устройство отображения транспортного средства согласно варианту 3 осуществления настоящего изобретения рисует участок, на котором профиль перекрестка, полученный из навигационного устройства 13, и объект, определенный посредством модуля 15 определения расположенных впереди объектов, перекрывают друг друга в области отображения на ветровом стекле. Соответственно, как проиллюстрировано на фиг. 13, перекрестки K1 и K2, которые представляют собой участки, скрытые позади едущего впереди объекта C, могут отображаться, как если водитель смотрит через объект C. Следовательно, водитель может подробно знать условия перекрестков K1 и K2.
[0055] Следует отметить, что хотя приводится описание примера, в котором профиль перекрестка рисуется, как если водитель смотрит через транспортное средство, в вышеуказанном варианте осуществления 3, это может применяться не только к профилю перекрестка, но также и к профилю общей дороги. Например, когда маршрут навигации искривлен, и состояние кривой скрывается позади объекта (транспортного средства) и является невидимым, кривая может отображаться, как если водитель смотрит через объект (транспортное средство). Соответственно, водитель может подробно знать то, как дорога искривлена.
Список номеров ссылок
[0056] 11 - GPS-антенна
12 - геомагнитный датчик
13 - навигационное устройство
14 - камера переднего вида
15 - модуль определения расположенных впереди объектов
16 - камера обнаружения точек обзора
17 - модуль определения позиций точек обзора
18 - контроллер отображения
19 - дисплей
21 - данные перекрестков
22 - картографические данные
23 - датчик ускорения
24 - гиродатчик
25 - модуль вычисления




Изобретение относится к области навигационного приборостроения и может найти применение в устройствах отображения состояния транспортных средств. Технический результат – расширение функциональных возможностей. Для этого устройство отображения транспортного средства выполнено с возможностью отображать маршрут навигации в пункт назначения рассматриваемого транспортного средства и включает в себя навигационное устройство 13, камеру 14 переднего вида, модуль 15 определения расположенных впереди объектов, контроллер 18 отображения и дисплей 19. Камера переднего вида захватывает передний вид впереди рассматриваемого транспортного средства. Модуль определения расположенных впереди объектов определяет объект на поверхности проезжей дороги впереди рассматриваемого транспортного средства на основе изображения переднего вида, захваченного посредством камеры переднего вида. Контроллер отображения рисует перекрывающийся участок, на котором маршрут навигации, вычисленный посредством навигационного устройства, и объект, определенный посредством модуля определения расположенных впереди объектов, перекрывают друг друга в области отображения на ветровом стекле, и неперекрывающийся участок, на котором маршрут навигации и объект не перекрывают друг друга в области отображения на ветровом стекле таким образом, что перекрывающийся участок должен представляться в режиме, отличающемся от режима для неперекрывающегося участка, и выводит нарисованное изображение на дисплей. 4 з.п. ф-лы, 13 ил.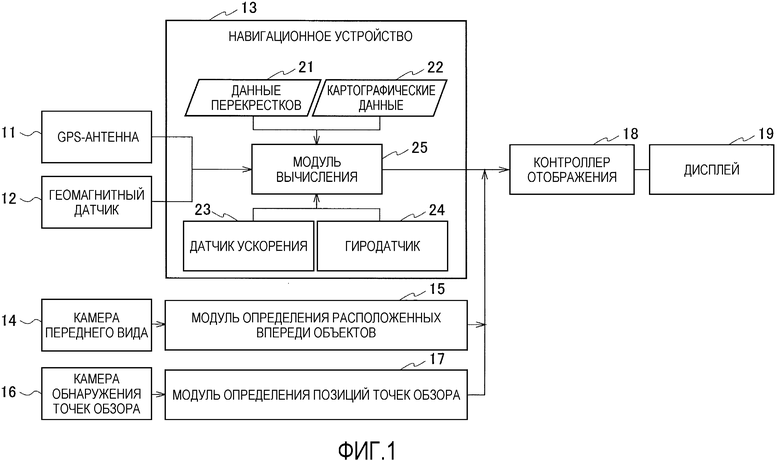
1. Устройство отображения транспортного средства, выполненное с возможностью отображать маршрут навигации в пункт назначения рассматриваемого транспортного средства, причем устройство отображения транспортного средства содержит:
- навигационное устройство, выполненное с возможностью вычислять маршрут навигации, по которому должно двигаться рассматриваемое транспортное средство согласно инструкциям по навигации;
- камеру переднего вида, выполненную с возможностью захватывать передний вид впереди рассматриваемого транспортного средства;
- модуль определения расположенных впереди объектов, выполненный с возможностью определять транспортное средство на поверхности проезжей дороги впереди рассматриваемого транспортного средства на основе изображения переднего вида, захваченного посредством камеры переднего вида;
- контроллер отображения, выполненный с возможностью рисовать перекрывающийся участок с помощью непрерывной линии и неперекрывающийся участок с помощью прерывистой фигуры, причем перекрывающийся участок представляет собой участок маршрута навигации, вычисленного посредством навигационного устройства, перекрывающий транспортное средство на поверхности проезжей дороги впереди рассматриваемого транспортного средства, определенного посредством модуля определения расположенных впереди объектов, в области отображения на ветровом стекле, причем неперекрывающийся участок представляет собой участок маршрута навигации, вычисленного посредством навигационного устройства, не перекрывающий транспортное средство на поверхности проезжей дороги впереди рассматриваемого транспортного средства, определенного посредством модуля определения расположенных впереди объектов, в области отображения на ветровом стекле; и
- дисплей, выполненный с возможностью отображать изображение, нарисованное посредством контроллера отображения в области отображения, предоставленной таким образом, что она перекрывает позицию ветрового стекла.
2. Устройство отображения транспортного средства по п. 1, в котором контроллер отображения выполнен с возможностью рисовать стрелку, указывающую направление движения, на переднем конце непрерывной линии в перекрывающемся участке.
3. Устройство отображения транспортного средства по п. 1, в котором контроллер отображения выполнен с возможностью рисовать непрерывную линию в перекрывающемся участке таким образом, что оба конца непрерывной линии продлеваются в прерывистую фигуру в неперекрывающемся участке.
4. Устройство отображения транспортного средства по п. 1, в котором контроллер отображения выполнен с возможностью рисовать перекрывающийся участок отличающимся образом по сравнению с неперекрывающимся участком по меньшей мере по одному из цвета или яркости.
5. Устройство отображения транспортного средства по п. 1, в котором контроллер отображения выполнен с возможностью рисовать профиль дороги в перекрывающемся участке.
| JP 2008542746 А, 27.11.2008 | |||
| JP 2010156608 А, 15.07.2010 | |||
| EP 1530025 A2, 11.05.2005 | |||
| US 20050246096 A1, 03.11.2005 | |||
| EP 1533592 A1, 25.05.2005 | |||
| Состав и структура средств управления удаленным доступом, рис | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
| - М.: Солон-Пресс, 2006. | |||

