Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству представления информации и к способу представления информации, которые представляют информацию пассажиру в автономном транспортном средстве.
Уровень техники
[0002] Предложена технология, в которой смонтированное в транспортном средстве электронное устройство, к примеру, навигационное устройство изменяет содержимое для отображения и темп речи для передачи информации на нескольких стадиях вместо двух стадий, соответственно, для движения и остановки, в зависимости от скорости транспортного средства, чтобы надлежащим образом представлять информацию водителю в зависимости от окружения движения (см. патентный документ 1).
Список библиографических ссылок
Патентные документы
[0003] Патентный документ 1. Публикация заявки на патент (Япония) номер 2001-33256
Сущность изобретения
Техническая задача
[0004] Тем не менее, технология, описанная в патентном документе 1, представляет собой технологию для изменения способа представления информации в зависимости от скорости транспортного средства, и не учитывается время, требуемое водителю для того, чтобы выполнять определение и выбор, когда водитель выполняет выбор из представленной информации выбора.
[0005] С учетом проблемы, описанной выше, задача настоящего изобретения заключается в том, чтобы предоставлять устройство представления информации и способ представления информации, которые позволяют представлять соответствующую информацию выбора в зависимости от состояний транспортного средства.
Решение задачи
[0006] В автономном транспортном средстве установлено устройство представления информации, в котором возможный вариант действия для осуществления посредством транспортного средства может задаваться на основе выбора пассажиром из представленной информации выбора. Устройство представления информации задает возможный вариант действия для осуществления посредством автономного транспортного средства, вычисляет допустимый запас времени выбора от текущего момента времени до момента времени, в который пассажир должен завершать выбор из информации выбора, задает информацию выбора на основе возможного варианта действия в зависимости от допустимого запаса времени выбора и представляет заданную информацию выбора пассажиру.
Преимущества изобретения
[0007] Настоящее изобретение может предоставлять устройство представления информации и способ представления информации, которые позволяют представлять соответствующую информацию выбора в зависимости от состояний транспортного средства с учетом времени, необходимого для выбора информации.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой, поясняющей пример конфигурации устройства представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 2 является схемой, поясняющей работу устройства представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 3 является схемой, поясняющей способ вычисления допустимого запаса времени выбора в устройстве представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 4 является таблицей, иллюстрирующей пример пунктов для выбора, соответствующих возможным вариантам действий в устройстве представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 5 является таблицей, иллюстрирующей пример максимального числа вариантов выбора для каждого допустимого запаса времени выбора в устройстве представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 6 является схемой, поясняющей пример модуля представления в устройстве представления информации согласно первому варианту осуществления настоящего изобретения.
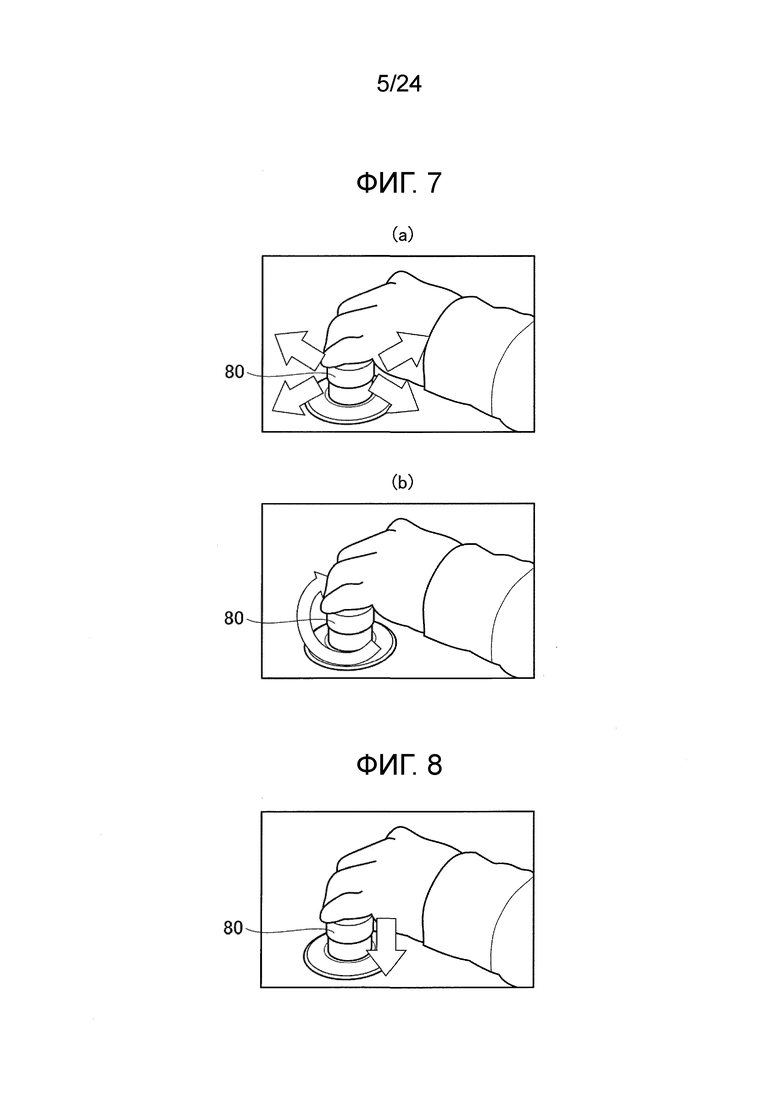
Части (a) и (b) по фиг. 7 являются примерами, иллюстрирующими модуль ввода в устройстве представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 8 является примером, иллюстрирующим модуль ввода в устройстве представления информации согласно первому варианту осуществления настоящего изобретения.
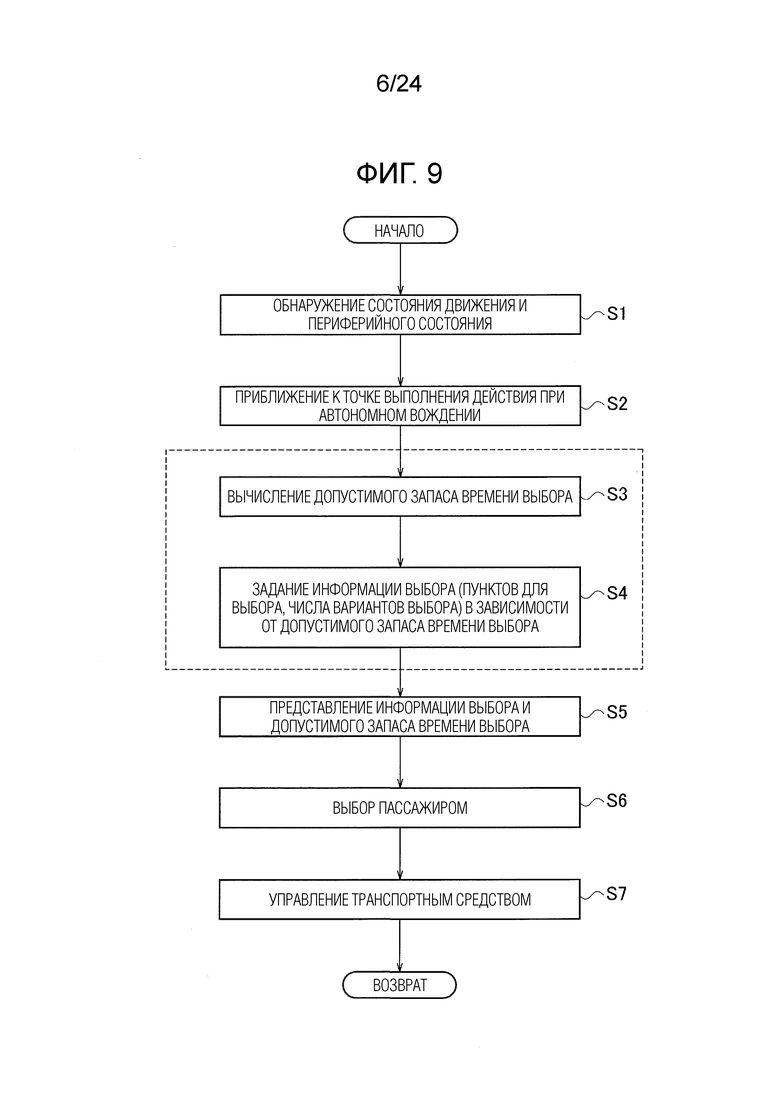
Фиг. 9 является блок-схемой последовательности операций, поясняющей пример способа представления информации с использованием устройства представления информации согласно первому варианту осуществления настоящего изобретения.
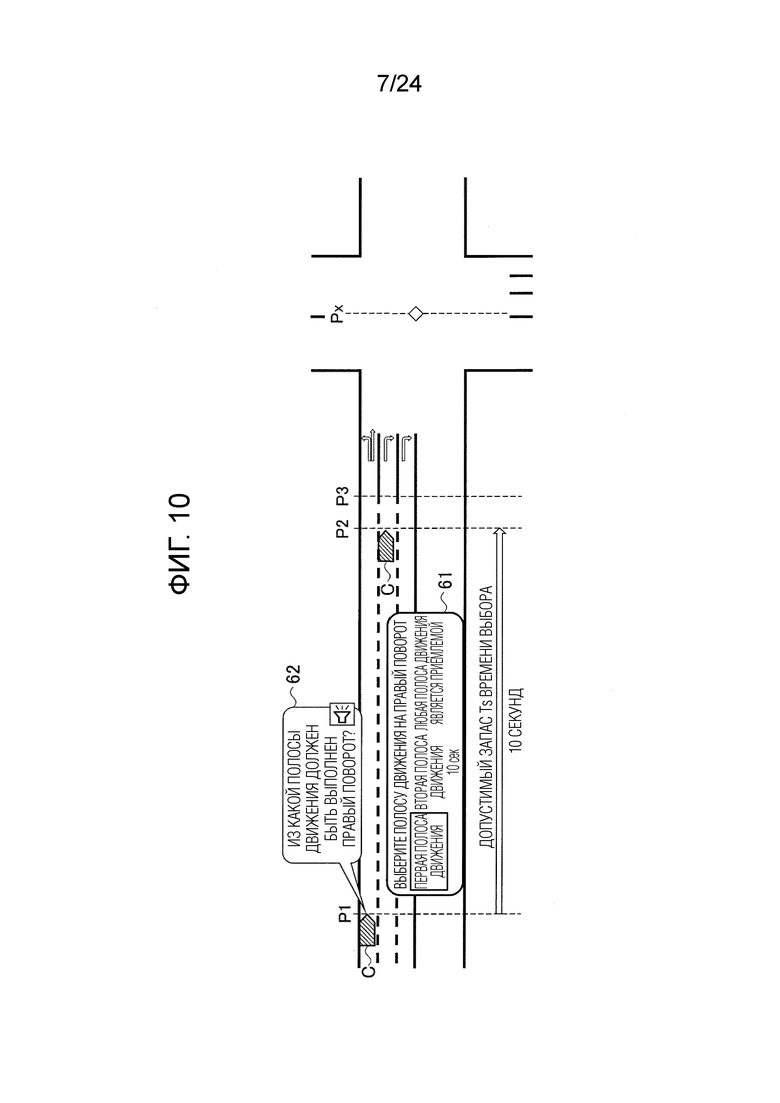
Фиг. 10 является схемой, поясняющей пример работы устройства представления информации согласно первому варианту осуществления настоящего изобретения.
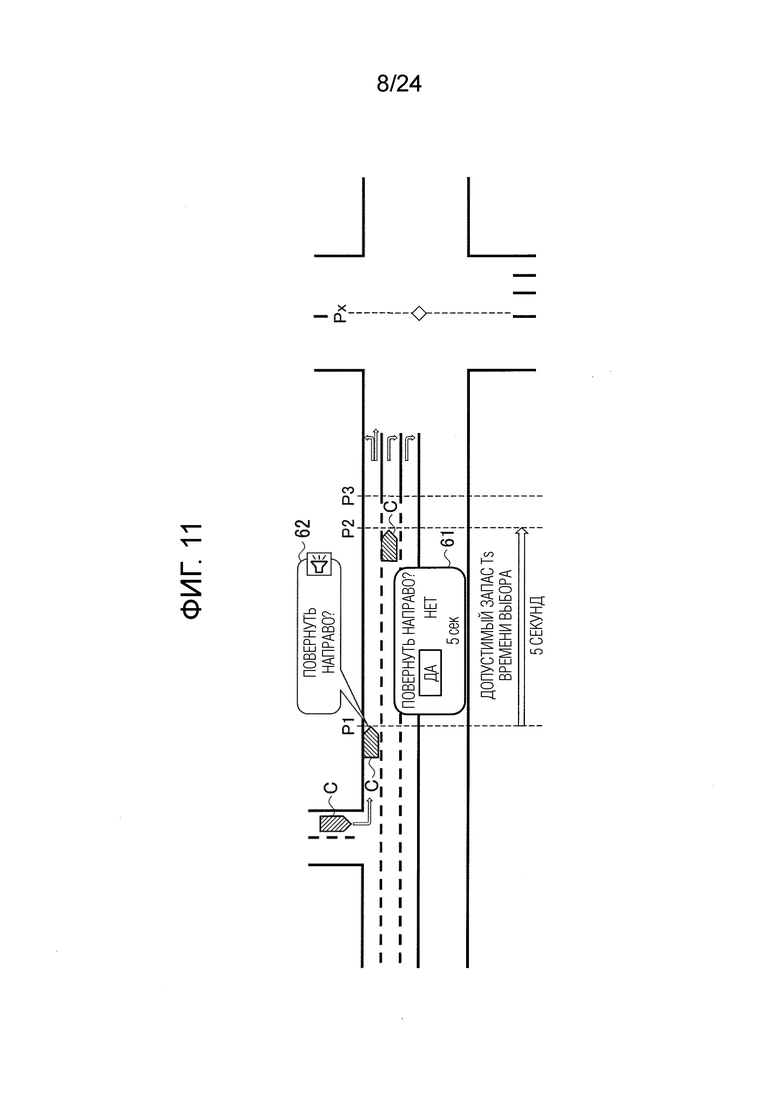
Фиг. 11 является схемой, поясняющей пример работы устройства представления информации согласно первому варианту осуществления настоящего изобретения в случае, если допустимый запас времени выбора является небольшим.
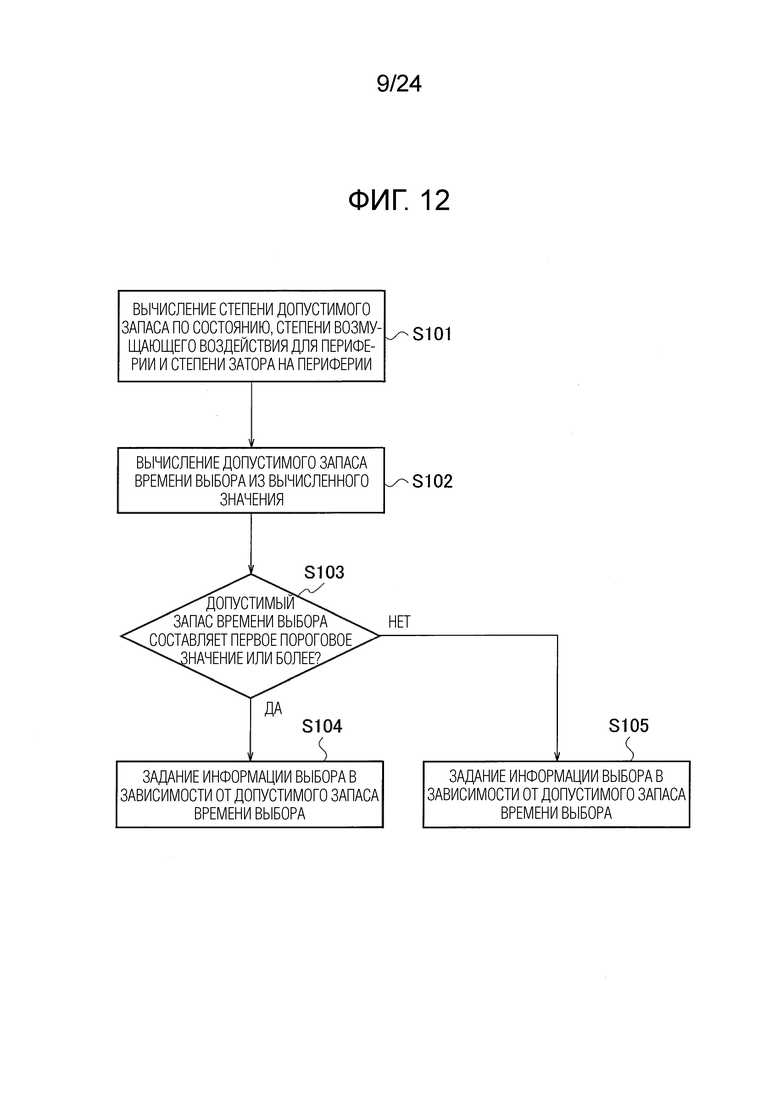
Фиг. 12 является блок-схемой последовательности операций, поясняющей пример способа представления информации с использованием устройства представления информации согласно второму варианту осуществления настоящего изобретения.
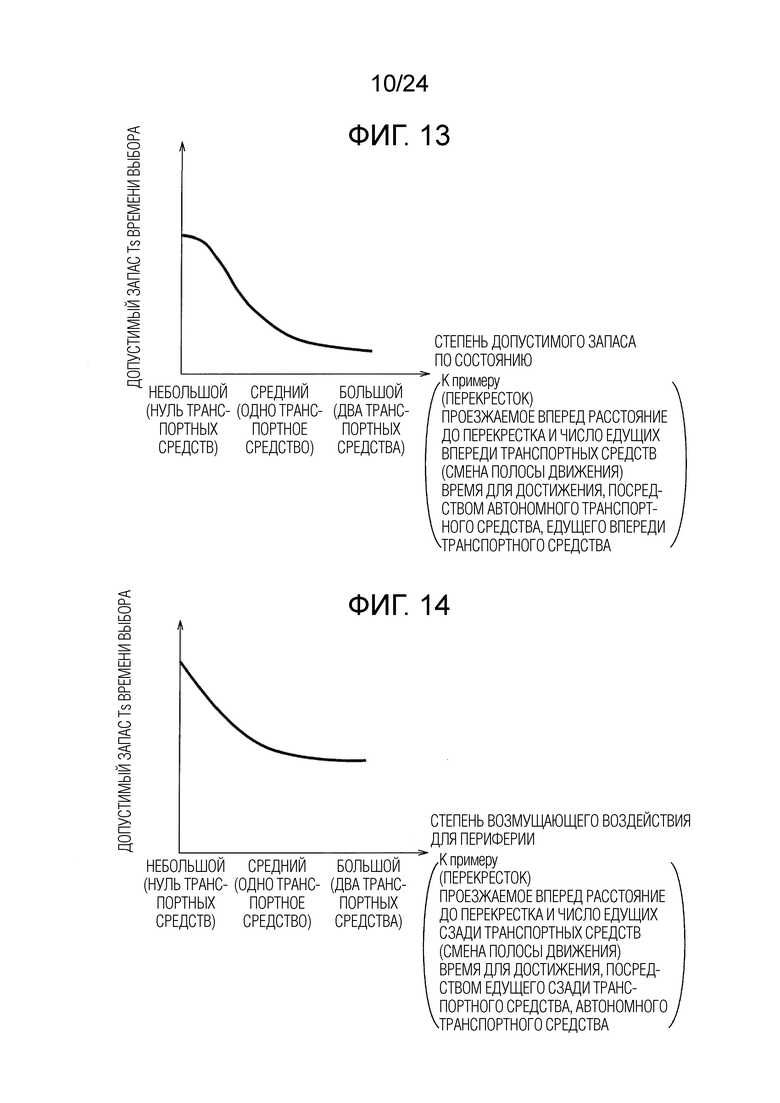
Фиг. 13 является схемой, поясняющей способ вычисления допустимого запаса времени выбора на основе степени допустимого запаса по состоянию в устройстве представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 14 является схемой, поясняющей способ вычисления допустимого запаса времени выбора на основе степени возмущающего воздействия для периферии в устройстве представления информации согласно второму варианту осуществления настоящего изобретения.
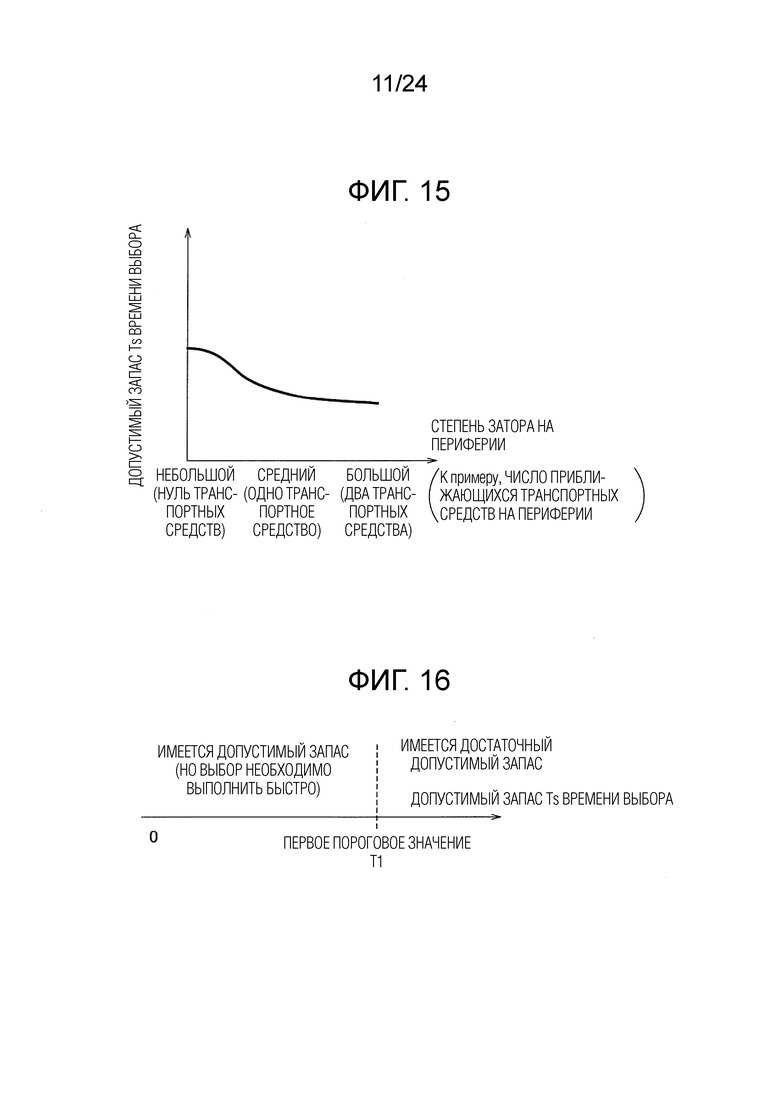
Фиг. 15 является схемой, поясняющей способ вычисления допустимого запаса времени выбора на основе степени затора на периферии в устройстве представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 16 является схемой, поясняющей первое пороговое значение, заданное для допустимого запаса времени выбора в устройстве представления информации согласно второму варианту осуществления настоящего изобретения.
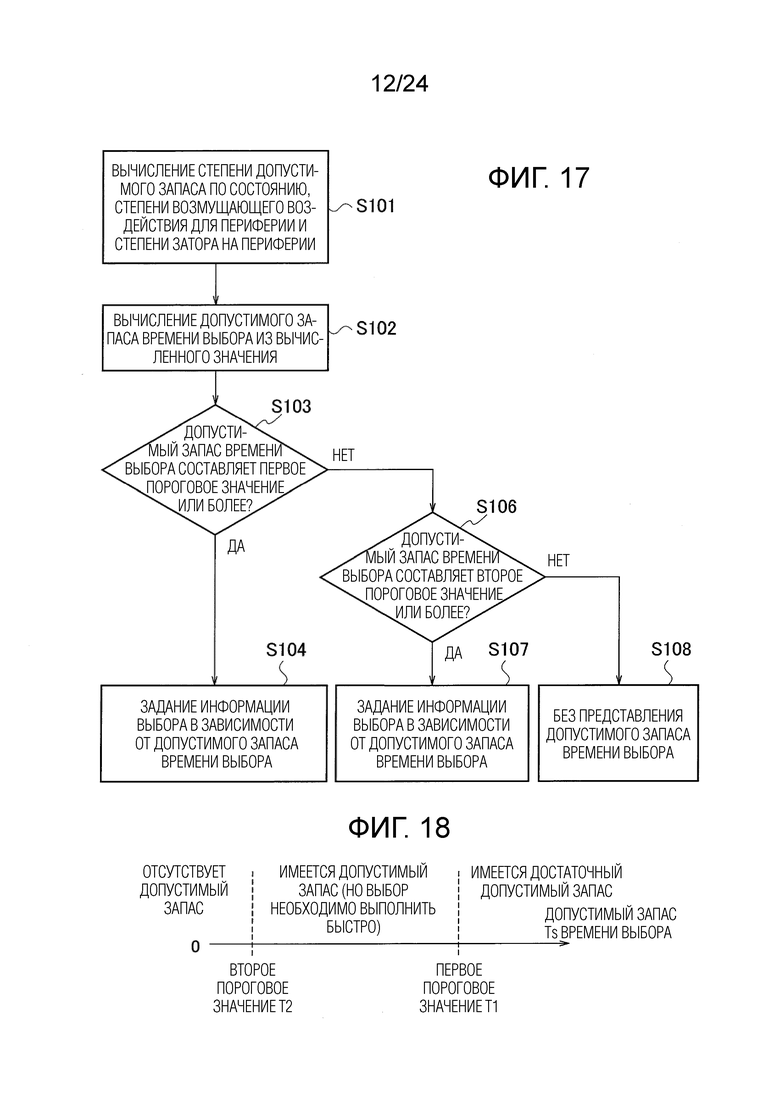
Фиг. 17 является блок-схемой последовательности операций, поясняющей пример способа представления информации с использованием устройства представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 18 является схемой, поясняющей первое пороговое значение и второе пороговое значение, заданные для допустимого запаса времени выбора в устройстве представления информации согласно второму варианту осуществления настоящего изобретения.
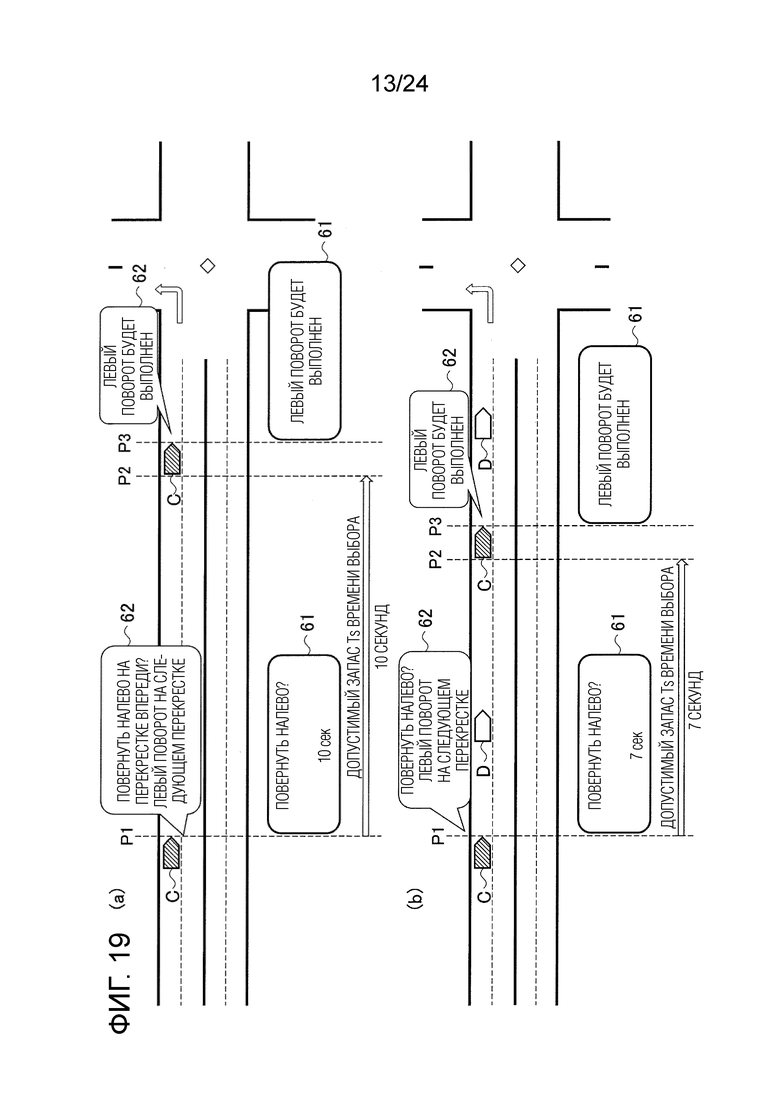
Части (a) и (b) по фиг. 19 являются схемами, поясняющими пример работы устройства представления информации согласно второму варианту осуществления настоящего изобретения.
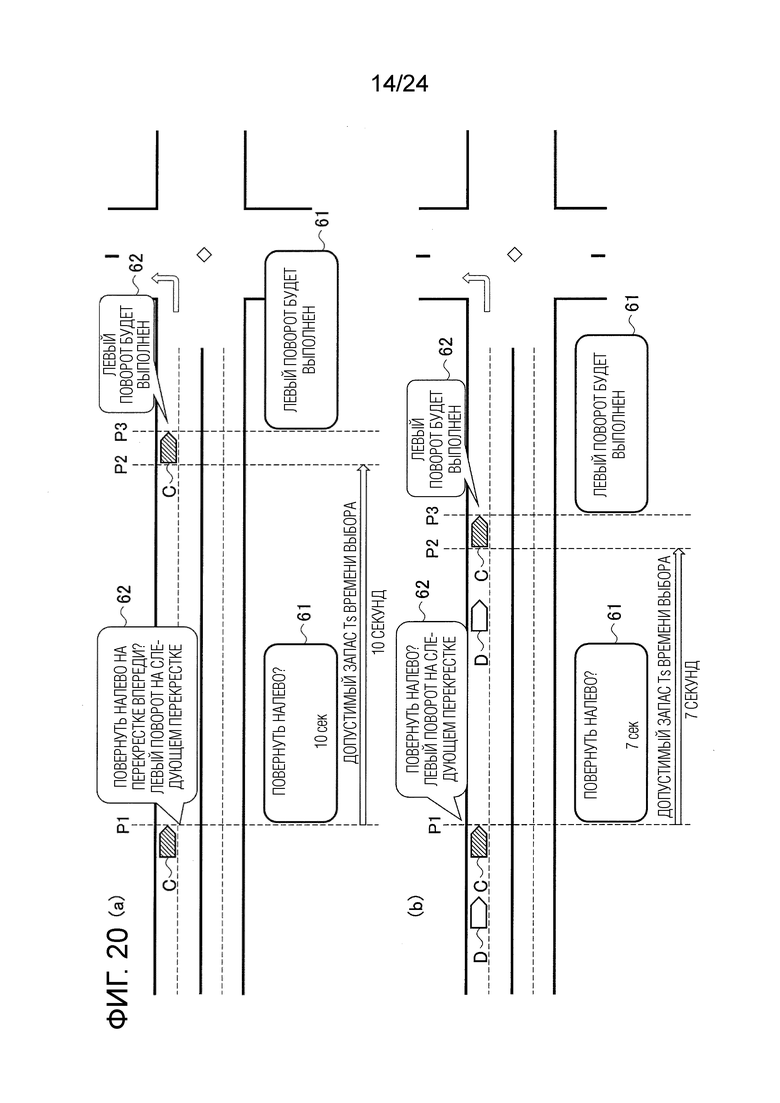
Части (a) и (b) по фиг. 20 являются схемами, поясняющими пример работы устройства представления информации согласно второму варианту осуществления настоящего изобретения.
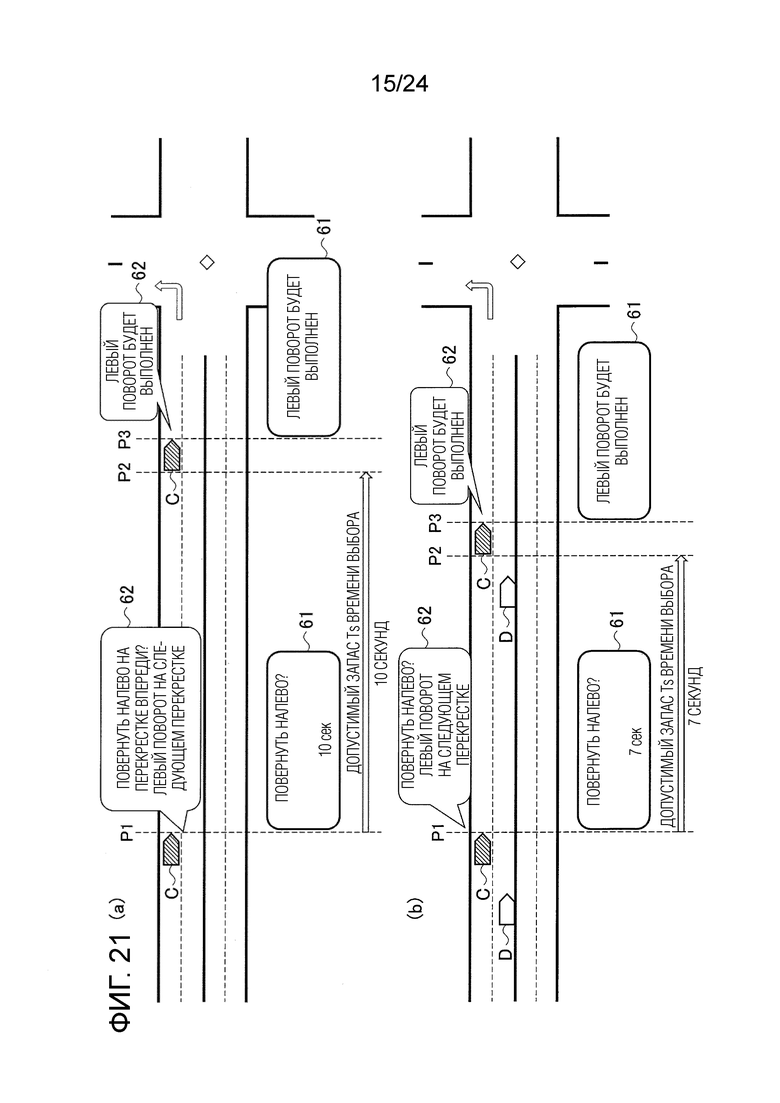
Части (a) и (b) по фиг. 21 являются схемами, поясняющими пример работы устройства представления информации согласно второму варианту осуществления настоящего изобретения.
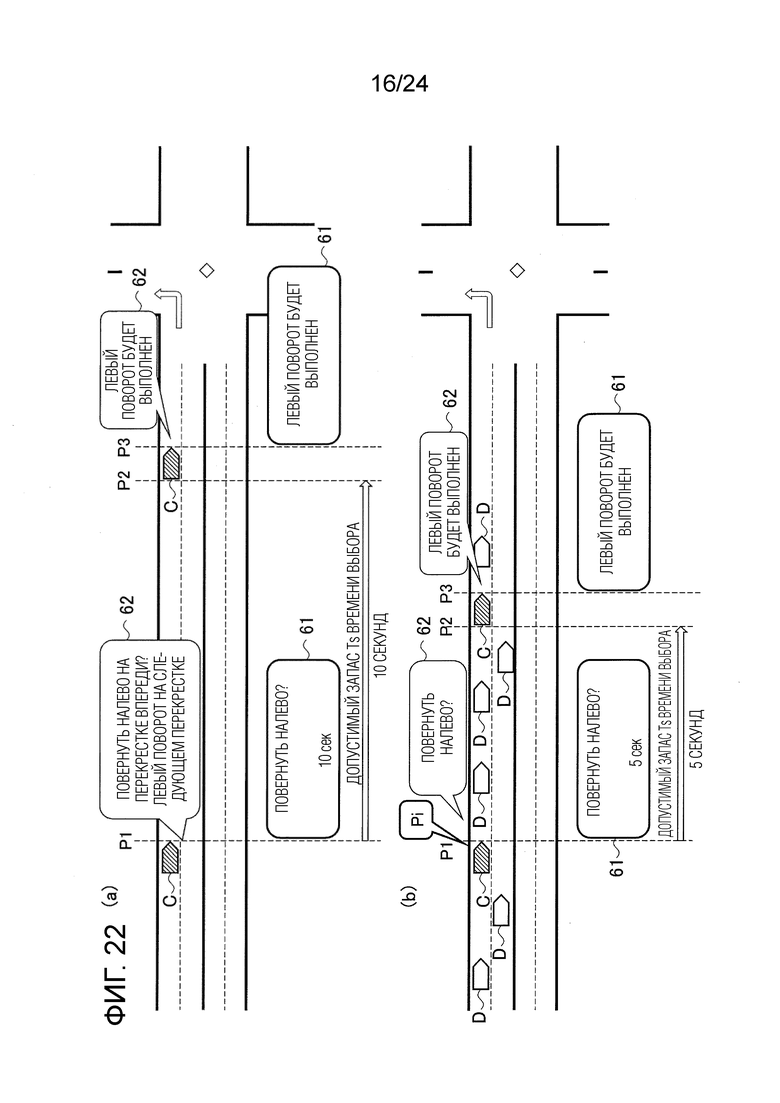
Части (a) и (b) по фиг. 22 являются схемами, поясняющими пример работы устройства представления информации согласно второму варианту осуществления настоящего изобретения.
Части (a) и (b) по фиг. 23 являются схемами, поясняющими пример работы устройства представления информации согласно второму варианту осуществления настоящего изобретения.
Части (a) и (b) по фиг. 24 являются схемами, поясняющими пример работы устройства представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 25 является схемой, поясняющей способ вычисления допустимого запаса времени выбора на основе степени затора на периферии, когда транспортное средство остановлено, в устройстве представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 26 является схемой, поясняющей способ вычисления допустимого запаса времени выбора на основе степени возмущающего воздействия для периферии, когда транспортное средство остановлено, в устройстве представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 27 является схемой, поясняющей способ вычисления допустимого запаса времени выбора на основе степени затора на периферии, когда транспортное средство остановлено, в устройстве представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 28 является схемой, поясняющей пример работы устройства представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 29 является схемой, поясняющей пример работы устройства представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 30 является схемой, поясняющей пример работы устройства представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 31 является схемой, поясняющей пример экрана отображения в устройстве представления информации согласно другому варианту осуществления настоящего изобретения.
Фиг. 32 является схемой, поясняющей пример экрана отображения в устройстве представления информации согласно другому варианту осуществления настоящего изобретения.
Подробное описание вариантов осуществления
[0009] Ниже описываются первый и второй варианты осуществления настоящего изобретения со ссылкой на чертежи. В описании чертежей, идентичные или аналогичные части обозначаются посредством идентичных или аналогичных ссылок с номерами, и перекрывающееся описание опускается.
[0010] Первый вариант осуществления
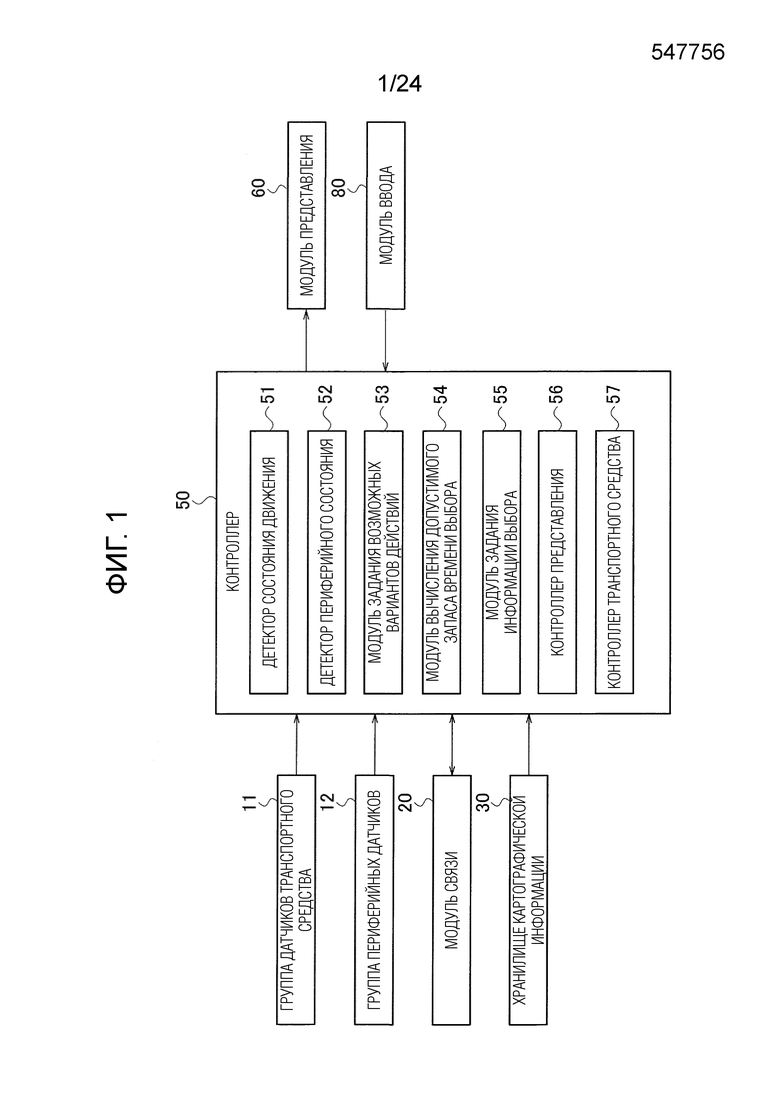
Как проиллюстрировано на фиг. 1, устройство представления информации согласно первому варианту осуществления настоящего изобретения включает в себя группу 11 датчиков транспортного средства, группу 12 периферийных датчиков, модуль 20 связи, хранилище 30 картографической информации, контроллер 50, модуль 60 представления и модуль 80 ввода. Устройство представления информации согласно первому варианту осуществления монтируется в автономном транспортном средстве C (см. фиг. 2), которое управляется в режиме автономного вождения на дорогах на основе выбора, выполненного пассажиром, и представляет информацию выбора, из которой выбор выполняется пассажиром. Автономное транспортное средство C может задавать возможный вариант действия для осуществления посредством транспортного средства на основе выбора пассажиром.
[0011] Группа 11 датчиков транспортного средства включает в себя датчики, такие как, например, датчик скорости, датчик ускорения, датчик угловой скорости и датчик угла поворота при рулении, которые соединяются с шиной CAN (контроллерной сети) и которые обнаруживают состояние движения автономного транспортного средства C, устройства, такие как приемное устройство на основе глобальной системы позиционирования (GPS), включенное в автомобильную навигационную систему, которые обнаруживают текущую позицию автономного транспортного средства C, и т.п. Группа 11 датчиков транспортного средства определяет величины перемещения, такие как скорость автономного транспортного средства C и трехосное ускорение и угловую скорость автономного транспортного средства C в трехмерной декартовой системе координат, посредством использования датчиков и регулярно выводит результаты определения в контроллер 50.
[0012] Группа 12 периферийных датчиков включает в себя датчики, такие как, например, камера, лазерный дальномер (LRF), ультразвуковой датчик, датчик миллиметрового диапазона и инфракрасный датчик, которые обнаруживают окружение около автономного транспортного средства C. Группа 12 периферийных датчиков регулярно выводит значения, обнаруженные посредством соответствующих датчиков, в контроллер 50.
[0013] Модуль 20 связи, например, представляет собой радиостанцию, которая в беспроводном режиме обменивается сигналами с внешним миром. Модуль 20 связи может получать число транспортных средств около автономного транспортного средства C, позиции этих транспортных средств, скорости этих транспортных средств и т.п. посредством выполнения связи между транспортными средствами, при которой модуль 20 связи обменивается позицией, скоростью и т.п. транспортного средства с другими транспортными средствами, либо посредством выполнения связи между транспортным средством и дорожной инфраструктурой, при которой модуль 20 связи обменивается позицией, скоростью и т.п. транспортного средства с придорожным устройством, установленным на обочине. Модуль 20 связи может получать различные фрагменты информации извне посредством использования интеллектуальной транспортной системы (ITS), которая отправляет информацию о погоде, информацию дорожного движения, такую как информация пробок и информация управления движением и т.п., в реальном времени. Модуль 20 связи регулярно выводит полученную информацию в контроллер 50.
[0014] Хранилище 30 картографической информации сохраняет картографическую информацию, включающую в себя дороги, полосы движения на каждой дороге, признаки вокруг дорог и т.п. Хранилище 30 картографической информации может быть сконфигурировано посредством полупроводникового запоминающего устройства, магнитного диска и т.п.
[0015] Контроллер 50 включает в себя детектор 51 состояния движения, детектор 52 периферийного состояния, модуль 53 задания возможных вариантов действий, модуль 54 вычисления допустимого запаса времени выбора, модуль 55 задания информации выбора, контроллер 56 представления и контроллер 57 транспортного средства.
[0016] Контроллер 50 может быть сконфигурирован, например, посредством микроконтроллера, который представляет собой интегральную схему, включающую в себя центральный процессор (CPU), запоминающее устройство, интерфейс ввода-вывода и т.п. В этом случае, несколько информационных процессоров (51-57), конфигурирующих контроллер 50, реализуются посредством CPU, выполняющего компьютерную программу, установленную заранее в микроконтроллере. Части, конфигурирующие контроллер 50, могут быть сконфигурированы посредством нераздельного элемента аппаратных средств или отдельных элементов аппаратных средств. Микроконтроллер также может служить в качестве, например, электронного модуля управления (ECU), используемого для другого управления, ассоциированного с транспортным средством, к примеру, управления автономным вождением.
[0017] Детектор 51 состояния движения обнаруживает состояние движения автономного транспортного средства C, на основе значений, обнаруженных посредством группы 11 датчиков транспортного средства. Состояние движения включает в себя позицию движения, скорость и т.п. автономного транспортного средства C. Детектор 51 состояния движения обнаруживает позицию движения автономного транспортного средства C в картографической информации, сохраненной в хранилище 30 картографической информации, на основе текущей позиции и величины перемещения автономного транспортного средства C, которые обнаруживаются посредством группы 11 датчиков транспортного средства. Детектор 51 состояния движения дополнительно вычисляет позицию автономного транспортного средства C относительно признаков, записанных в картографической информации, на основе позиций признаков, обнаруженных посредством группы 12 периферийных датчиков, и в силу этого получает подробную позицию движения автономного транспортного средства C в картографической информации.
[0018] Детектор 52 периферийного состояния обнаруживает состояние около автономного транспортного средства C, на основе объектов около автономного транспортного средства C, которые обнаруживаются посредством группы 12 периферийных датчиков. Объекты около автономного транспортного средства C включают в себя участников дорожного движения, таких как другие транспортные средства и пешеходы, и различные признаки, включающие в себя разделительные полосы, светофоры, дорожные знаки и т.п. Детектор 52 периферийного состояния может обнаруживать состояние светового сигнала светофора посредством выполнения обработки изображений. Кроме того, детектор 52 периферийного состояния обнаруживает число, позиции и скорости других транспортных средств, которые обнаруживаются посредством, по меньшей мере, одного из группы 12 периферийных датчиков и модуля 20 связи.
[0019] Модуль 53 задания возможных вариантов действий задает возможный вариант действия для осуществления посредством автономного транспортного средства C, который представляет собой возможный вариант для действия, выполняемого посредством автономного транспортного средства C в области, в которую движется автономное транспортное средство C. Возможный вариант действия, заданный посредством модуля 53 задания возможных вариантов действий, связан, по меньшей мере, с одним из действий, включающих в себя, например, поворот, смену полосы движения, движение в режиме оптимального регулирования скорости, выезд из потока и въезд в поток. Модуль 53 задания возможных вариантов действий задает возможный вариант действия, выполняемый на дороге в направлении движения, посредством обращения к области картографической информации, которая находится в предварительно определенной дальности от автономного транспортного средства C в направлении его движения.
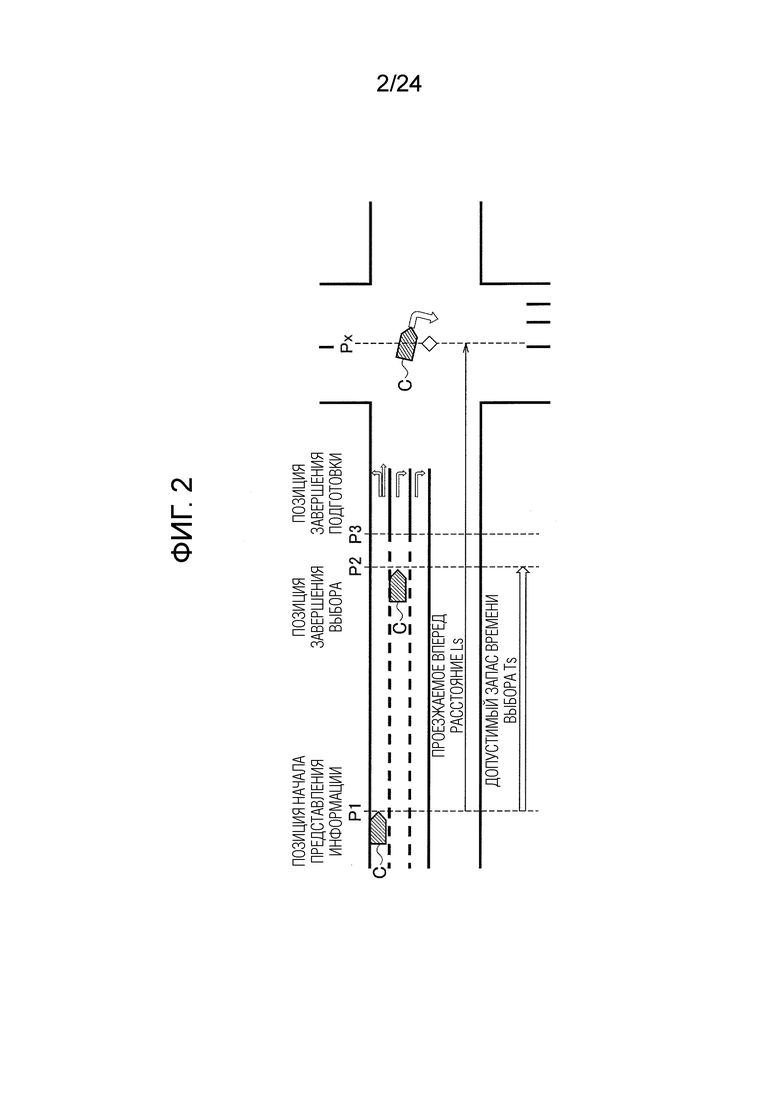
[0020] Как проиллюстрировано на фиг. 2, когда расстояние до точки Px выполнения действия, в которой выполняется заданный возможный вариант действия, опускается ниже предварительно определенного порогового значения, модуль 53 задания возможных вариантов действий определяет то, что автономное транспортное средство C приближается к точке Px выполнения действия.
[0021] Когда модуль 53 задания возможных вариантов действий определяет то, что автономное транспортное средство C приближается к точке Px выполнения действия, модуль 54 вычисления допустимого запаса времени выбора регулярно вычисляет допустимый запас Ts времени выбора от текущего момента времени до момента времени, в который пассажир должен завершать выбор из информации выбора. В примере, проиллюстрированном на фиг. 2, приводится описание случая, когда задается маршрут движения, на котором автономное транспортное средство C поворачивает направо на перекрестке, и пассажир выбирает то, следует или нет поворачивать направо, или выбирает полосу движения, чтобы въезжать на перекресток для правого поворота. Точка Px выполнения действия задается, например, в центре перекрестка.
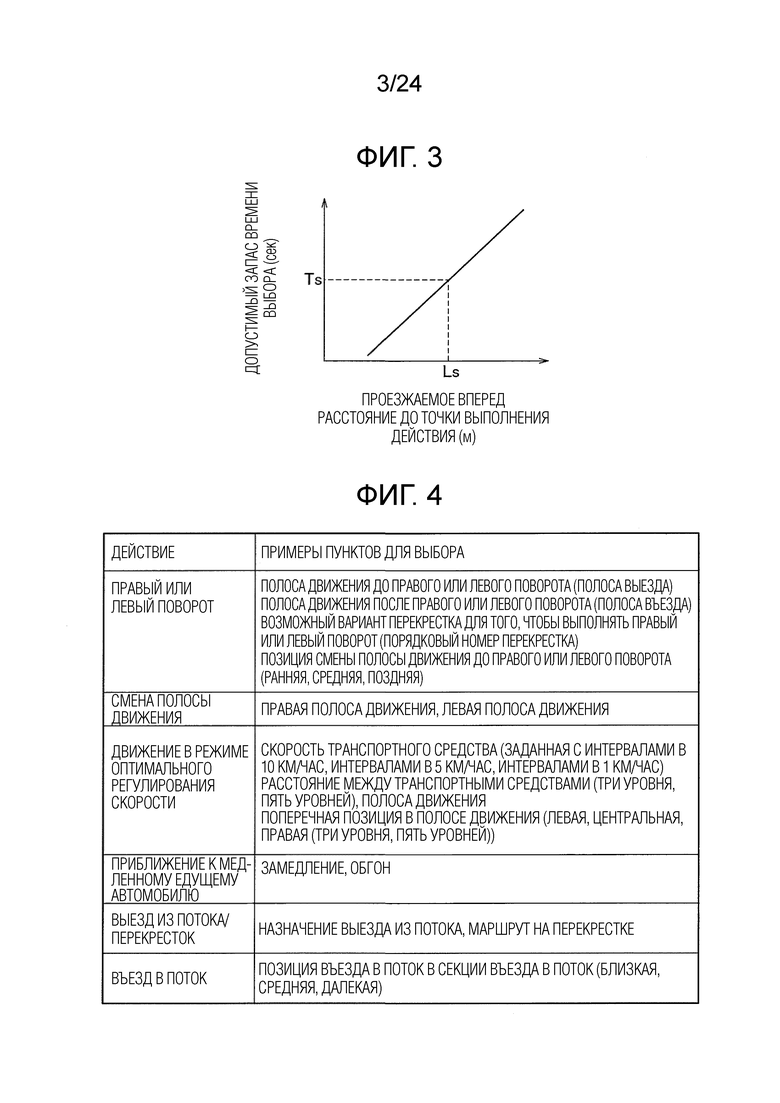
[0022] Например, как проиллюстрировано на фиг. 2 и 3, модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе скорости автономного транспортного средства C и проезжаемого передним ходом расстояния Ls от текущей позиции P1 автономного транспортного средства C до точки Px выполнения действия.
[0023] Допустимый запас Ts времени выбора представляет собой норму времени, которое требуется автономному транспортному средству C для того, чтобы двигаться из позиции P1 начала представления информации, в которой начинается представление информации выбора, в позицию P2 завершения выбора, в которой должен завершаться выбор из информации выбора. Позиция P2 завершения выбора задается не доезжая до позиции P3 завершения подготовки, расположенной от точки Px выполнения действия на минимальном расстоянии, требуемом для начала выполнения возможного варианта действия, так что перед позицией P3 завершения подготовки имеется определенный допустимый запас. Соответственно, как проиллюстрировано на фиг. 3, в профиле, который используется для вычисления допустимого запаса Ts времени выбора и который указывает взаимосвязь между допустимым запасом Ts времени выбора и проезжаемым передним ходом расстоянием Ls, расстояние Ls до точки Px выполнения действия имеет определенный допустимый запас даже в точке, в которой допустимый запас Ts времени выбора равен нулю. Следует отметить, что несколько профилей, к примеру, профиль, проиллюстрированный на фиг. 3, задаются, соответственно, для различных скоростей.
[0024] Модуль 55 задания информации выбора задает информацию выбора на основе возможного варианта действия, заданного посредством модуля 53 задания возможных вариантов действий, в зависимости от допустимого запаса времени выбора, вычисленного посредством модуля 54 вычисления допустимого запаса времени выбора. Информация выбора задается посредством задания пунктов для выбора и максимального числа вариантов выбора на основе возможного варианта действия.
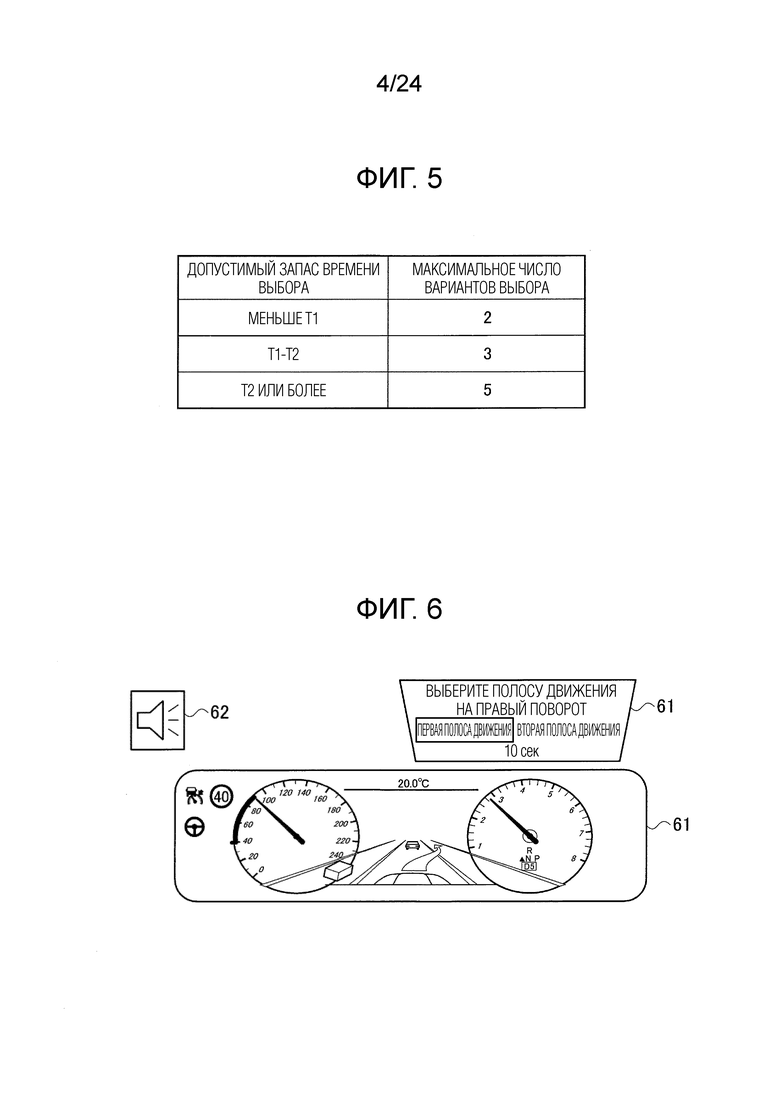
[0025] Модуль 55 задания информации выбора может задавать пункты для выбора таким образом, что чем меньше допустимый запас Ts времени выбора, тем более простыми являются пункты для выбора, и таким образом, что чем больше допустимый запас Ts времени выбора, тем более подробными являются пункты для выбора. Например, в примере, проиллюстрированном на фиг. 2, предусмотрено две полосы движения на правый поворот. Когда допустимый запас Ts времени выбора составляет предварительно определенное пороговое значение T1 или более, как проиллюстрировано на фиг. 4, то, следует или нет выполнять правый поворот или нет, полосы движения, по которым следует двигаться до и после правого поворота, и т.п., может задаваться в качестве пунктов для выбора. Между тем, когда допустимый запас Ts времени выбора меньше порогового значения T1, пункт для выбора может быть простым, включающим в себя только пункт того, следует или нет выполнять правый поворот. Кроме того, как проиллюстрировано на фиг. 5, модуль 55 задания информации выбора может задавать максимальное число вариантов выбора таким образом, что чем меньше допустимый запас Ts времени выбора, тем меньше максимальное число вариантов выбора, и чем больше допустимый запас Ts времени выбора, тем больше максимальное число вариантов выбора.
[0026] Кроме того, в качестве возможных вариантов действий и пунктов для выбора на основе возможного варианта действия, можно задавать число перекрестков перед перекрестком, чтобы выполнять поворот (правый или левый поворот), позицию, чтобы выполнять смену полосы движения для поворота, направление смены полосы движения, скорость транспортного средства при движении в режиме оптимального регулирования скорости, расстояние между транспортными средствами, полосу движения, позицию транспортного средства в полосе движения в направлении ширины транспортного средства, маршрут движения при выезде из потока и въезде в поток и т.п. Кроме того, модуль 53 задания возможных вариантов действий может задавать возможный вариант действия в зависимости от состояния около автономного транспортного средства C. Например, когда автономное транспортное средство C приближается к едущему впереди транспортному средству, движущемуся на меньшей скорости, модуль 53 задания возможных вариантов действий может задавать возможный вариант действия замедления или обгона. Например, временной интервал задания смены полосы движения в качестве возможного варианта действия представляет собой момент, когда расстояние до едущего впереди транспортного средства опускается ниже предварительно определенного порогового значения, момент, когда помеха обнаруживается впереди автономного транспортного средства C, и т.п.
[0027] Контроллер 56 представления управляет модулем 60 представления таким образом, что информация выбора, заданная посредством модуля 55 задания информации выбора, представляется пассажиру автономного транспортного средства C.
[0028] Модуль 60 представления представляет информацию выбора, заданную посредством модуля 55 задания информации выбора, пассажиру автономного транспортного средства C, согласно управлению контроллером 56 представления. Модуль 60 представления представляет, пассажиру, различные фрагменты информации, включающие в себя информацию выбора, из которой выбор выполняется пассажиром. Как проиллюстрировано на фиг. 6, модуль 60 представления сконфигурирован, например, посредством, по меньшей мере, одного из дисплея 61, такого как жидкокристаллический дисплей или дисплей на лобовом стекле (HUD), который отображает изображения и символы, и динамика 62, который воспроизводит звуки.
[0029] В примере, проиллюстрированном на фиг. 6, в дополнение к сообщению "Выберите полосу движения на правый поворот", пункты для выбора "Первая полоса движения" и "Вторая полоса движения" и допустимый запас Ts времени выбора "10 секунд" отображаются в качестве информации выбора на дисплее 61, который представляет собой HUD, выполненный с возможностью отображать видео в качестве виртуального изображения посредством использования ветрового стекла автономного транспортного средства C и т.п. Первая полоса движения представляет собой полосу движения в правом конце. Кроме того, как проиллюстрировано на фиг. 6, дисплей 61 может отображать направление движения автономного транспортного средства C посредством стрелки вместе с дорогой, и динамик 62 может воспроизводить голос "Выберите полосу движения на правый поворот" вместе с отображением информации выбора.
[0030] Модуль 80 ввода управляется пассажиром автономного транспортного средства C, чтобы принимать выбор из информации выбора, представленной посредством модуля 60 представления. Например, как проиллюстрировано в частях (a) и (b) по фиг. 7, модуль 80 ввода представляет собой устройство ввода, работающее в горизонтальном направлении или в направлении вращения, и может инструктировать курсору для указания пункта для выбора перемещаться согласно операции пассажира. В примере, проиллюстрированном на фиг. 6, указывается пункт для выбора "Первая полоса движения". Как проиллюстрировано на фиг. 8, пассажир управляет модулем 80 ввода в вертикальном направлении, чтобы определять указанный пункт в качестве пункта для выбора на основе возможного варианта действия, который должен выполняться, и выбор пассажиром завершается.
[0031] Модуль 80 ввода может быть сконфигурирован как единое целое с дисплеем 61 в качестве дисплея с сенсорной панелью. Альтернативно, модуль 80 ввода может распознавать голос пассажира и принимать его в качестве операции пассажира.
[0032] Кроме того, модуль 80 ввода может иметь такую конфигурацию, в которой пункты для выбора являются повторно выбираемыми в течение допустимого запаса Ts времени выбора. В этом случае, модуль 60 представления только должен продолжать представление информации выбора в течение допустимого запаса Ts времени выбора.
[0033] Контроллер 57 транспортного средства управляет автономным транспортным средством C таким образом, что выполняется возможный вариант действия, соответствующий пункту для выбора, выбранному пассажиром через модуль 80 ввода. Контроллер 57 транспортного средства управляет приводной системой, системой рулевого управления и т.п. таким образом, что автономное транспортное средство C управляется в режиме автономного вождения вдоль заданного маршрута движения, на основе правил и т.п., заданных заранее, в дополнение к состоянию движения и периферийному состоянию, обнаруженным, соответственно, посредством детектора 51 состояния движения и детектора 52 периферийного состояния, картографической информации, сохраненной в хранилище 30 картографической информации, и т.п.
[0034] Способ представления информации
Ниже описывается пример способа представления информации с использованием устройства представления информации согласно первому варианту осуществления со ссылкой на блок-схему последовательности операций способа по фиг. 9.
[0035] Во-первых, на этапе S1 детектор 51 состояния движения и детектор 52 периферийного состояния обнаруживают состояние движения и периферийное состояние автономного транспортного средства C, на основе значений, обнаруженных посредством группы 11 датчиков транспортного средства и группы 12 периферийных датчиков.
[0036] На этапе S2 модуль 53 задания возможных вариантов действий обращается в хранилище 30 картографической информации и задает возможный вариант действия, выполняемый посредством автономного транспортного средства C на дороге в направлении движения. Кроме того, когда расстояние до точки Px выполнения действия, в которой выполняется заданный возможный вариант действия, опускается ниже предварительно определенного порогового значения, модуль 53 задания возможных вариантов действий определяет то, что автономное транспортное средство C приближается к точке Px выполнения действия. Например, как проиллюстрировано на фиг. 10, модуль 53 задания возможных вариантов действий определяет то, что автономное транспортное средство C приближается к точке Px выполнения действия в позиции P1. Позиция P1 представляет собой позицию P1 начала представления информации.
[0037] На этапе S3, когда модуль 53 задания возможных вариантов действий определяет то, что автономное транспортное средство C приближается к точке Px выполнения действия, модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора от текущего момента времени до момента времени, в который пассажир должен завершать выбор из информации выбора. Например, как проиллюстрировано на фиг. 10, модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора (10 секунд ≥ T1) в качестве времени, которое требуется автономному транспортному средству C для того, чтобы двигаться из позиции P1 начала представления информации в позицию P2 завершения выбора.
[0038] На этапе S4 модуль 55 задания информации выбора задает пункты для выбора и максимальное число вариантов выбора на основе возможного варианта действия, заданного на этапе S2, в зависимости от допустимого запаса Ts времени выбора, вычисленного на этапе S3. Например, как проиллюстрировано на фиг. 10, модуль 55 задания информации выбора задает "Первая полоса движения", "Вторая полоса движения" и "Любая полоса движения является приемлемой" в качестве пунктов для выбора. Следует отметить, что как проиллюстрировано на фиг. 10, относительно сообщений и т.п., представленных пассажиру, символы, отображаемые на дисплее 61, и голос, воспроизводимый посредством динамика 62, не обязательно должны быть идентичными и могут надлежащим образом задаваться таким образом, что пассажир может легко выяснять сообщения.
[0039] На этапе S5 контроллер 56 представления управляет модулем 60 представления таким образом, что пункты для выбора, заданные на этапе S4, представляются пассажиру автономного транспортного средства C. Как проиллюстрировано на фиг. 10, модуль 60 представления представляет пункты для выбора "Первая полоса движения", "Вторая полоса движения" и "Любая полоса движения является приемлемой" пассажиру.
[0040] На этапе S6 модуль 80 ввода управляется пассажиром и принимает выбор из информации выбора, представленной посредством модуля 60 представления. Например, модуль 80 ввода управляется пассажиром и принимает выбор пункта для выбора "Первая полоса движения".
[0041] На этапе S7 контроллер 57 транспортного средства управляет автономным транспортным средством C таким образом, что выполняется возможный вариант действия, соответствующий пункту для выбора, выбранному пассажиром через модуль 80 ввода. Автономное транспортное средство C начинает правый поворот из крайней правой полосы движения, согласно выбору, выполненному пассажиром через модуль 80 ввода.
[0042] Далее приводится описание случая, в котором допустимый запас Ts времени выбора является небольшим, такой как, например, случай, в котором автономное транспортное средство C въезжает на дорогу с точкой Px выполнения действия с боковой дороги, как проиллюстрировано на фиг. 11.
[0043] После того, как автономное транспортное средство C въезжает на дорогу с точкой Px выполнения действия, модуль 53 задания возможных вариантов действий определяет то, что автономное транспортное средство C уже приближается к точке Px выполнения действия. Соответственно, модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора (5 секунд<T1), меньший допустимого запаса времени выбора на фиг. 10.
[0044] Модуль 55 задания информации выбора задает, например, сообщение "Повернуть направо?" вместе с пунктами для выбора "Да" и "Нет" в качестве пунктов для выбора, более простых, чем пункты для выбора на фиг. 10, в зависимости от допустимого запаса Ts времени выбора. Соответственно, когда допустимый запас Ts времени выбора является небольшим, можно упрощать выяснение информации выбора для пассажира и уменьшать время до завершения выбора.
[0045] Как описано выше, устройство представления информации согласно первому варианту осуществления задает информацию выбора, которая должна представляться пассажиру в зависимости от допустимого запаса Ts времени выбора, и в силу этого может представлять, пассажиру, соответствующую информацию выбора, удовлетворяющую состоянию транспортного средства с учетом времени, необходимого для выбора информации.
[0046] Кроме того, устройство представления информации согласно первому варианту осуществления задает пункты для выбора, которые должны представляться пассажиру, и максимальное число вариантов выбора в зависимости от допустимого запаса Ts времени выбора, и в силу этого может представлять, пассажиру, соответствующую информацию выбора, удовлетворяющую состоянию транспортного средства с учетом времени, необходимого для выяснения и выбора информации.
[0047] Кроме того, в устройстве представления информации согласно первому варианту осуществления, чем меньше допустимый запас Ts времени выбора, тем более простыми являются пункты для выбора или тем меньше максимальное число вариантов выбора. Это может уменьшать время, необходимое для выяснения и выбора информации, и представлять, пассажиру, соответствующую информацию выбора, удовлетворяющую состоянию транспортного средства.
[0048] Кроме того, устройство представления информации согласно первому варианту осуществления задает информацию выбора на основе возможного варианта действия, связанного, по меньшей мере, с одним из поворота, смены полосы движения, движения в режиме оптимального регулирования скорости, выезда из потока и въезда в поток, и в силу этого может представлять, пассажиру, соответствующую информацию выбора, удовлетворяющую различным состояниям транспортного средства с учетом времени, необходимого для выбора информации.
[0049] Кроме того, устройство представления информации согласно первому варианту осуществления представляет допустимый запас Ts времени выбора пассажиру одновременно с информацией выбора. Пассажир в силу этого может легко выяснять временной предел для того, чтобы завершать выбор, и может повышаться уверенность в выборе информации выбора.
[0050] Кроме того, устройство представления информации согласно первому варианту осуществления вычисляет допустимый запас Ts времени выбора на основе расстояния от текущей позиции автономного транспортного средства C до точки Px выполнения действия и в силу этого может повышать точность допустимого запаса Ts времени выбора, который представляет собой время движения до точки, в которой должен завершаться выбор.
[0051] Кроме того, устройство представления информации согласно первому варианту осуществления обеспечивает возможность повторного выбора из информации выбора в течение допустимого запаса Ts времени выбора. Вследствие этого, когда пассажир выбирает неправильный пункт для выбора, пассажир может повторно выбирать требуемый пункт для выбора.
[0052] Второй вариант осуществления
Устройство представления информации согласно второму варианту осуществления настоящего изобретения отличается от устройства представления информации в первом варианте осуществления в таких аспектах, что модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора в зависимости от других транспортных средств около автономного транспортного средства C. Конфигурации, операции и преимущества, не описанные во втором варианте осуществления, являются практически идентичными конфигурациям, операциям и преимуществам в первом варианте осуществления, и перекрывающееся описание опускается.
[0053] Ниже описывается пример способа представления информации с использованием устройства представления информации согласно второму варианту осуществления со ссылкой на блок-схему последовательности операций способа по фиг. 12. Поскольку последовательность процессов, проиллюстрированных на блок-схеме последовательности операций способа по фиг. 12, соответствует этапам S3 и S4, проиллюстрированным на блок-схеме последовательности операций способа по фиг. 9, описание других этапов опускается.
[0054] На этапе S101, когда автономное транспортное средство C приближается к точке Px выполнения действия, модуль 54 вычисления допустимого запаса времени выбора вычисляет и определяет, по меньшей мере, одно из степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии.
[0055] Например, как проиллюстрировано на фиг. 13, когда возможный вариант действия представляет собой поворот на перекрестке, число других транспортных средств впереди автономного транспортного средства C и до перекрестка и расстояние от текущей позиции до перекрестка могут использоваться для определения степени допустимого запаса по состоянию. Кроме того, когда возможный вариант действия представляет собой смену полосы движения, может использоваться время, которое требуется автономному транспортному средству C для того, чтобы приближаться к другому транспортному средству впереди автономного транспортного средства C на предварительно определенное расстояние.
[0056] Например, как проиллюстрировано на фиг. 14, когда возможный вариант действия представляет собой поворот на перекрестке, число других транспортных средств позади автономного транспортного средства C и расстояние от текущей позиции до перекрестка может использоваться для определения степени возмущающего воздействия для периферии. Кроме того, когда возможный вариант действия представляет собой смену полосы движения, может использоваться время, которое требуется другому транспортному средству позади автономного транспортного средства C для того, чтобы приближаться к автономному транспортному средству C на предварительно определенное расстояние.
[0057] Например, как проиллюстрировано на фиг. 15, число других транспортных средств в предварительно определенной дальности от автономного транспортного средства C может использоваться для определения степени затора на периферии.
[0058] На этапе S102 модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе, по меньшей мере, одного из степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии, определенной на этапе S101.
[0059] Как проиллюстрировано на фиг. 13, когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени допустимого запаса по состоянию, чем больше число других транспортных средств впереди автономного транспортного средства C, тем меньше допустимый запас Ts времени выбора. Несколько профилей, указывающих взаимосвязь между степенью допустимого запаса по состоянию и допустимым запасом Ts времени выбора, к примеру, профиль, проиллюстрированный на фиг. 13, задаются, соответственно, для различных расстояний до перекрестка, и чем больше расстояние до перекрестка, тем больше допустимый запас Ts времени выбора.
[0060] Как проиллюстрировано на фиг. 14, когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени возмущающего воздействия для периферии, чем больше число других транспортных средств позади автономного транспортного средства C, тем меньше допустимый запас Ts времени выбора. Несколько профилей, указывающих взаимосвязь между степенью возмущающего воздействия для периферии и допустимым запасом Ts времени выбора, к примеру, профиль, проиллюстрированный на фиг. 14, задаются, соответственно, для различных расстояний до перекрестка, и чем больше расстояние до перекрестка, тем больше допустимый запас Ts времени выбора.
[0061] Как проиллюстрировано на фиг. 15, когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени затора на периферии, чем больше число транспортного средства на периферии, тем меньше допустимый запас Ts времени выбора. Следует отметить, что модуль 54 вычисления допустимого запаса времени выбора может произвольно использовать, по меньшей мере, одно из степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии, и взвешивание каждой степени при вычислении допустимого запаса Ts времени выбора может произвольно задаваться.
[0062] На этапе S103, как проиллюстрировано на фиг. 16, модуль 55 задания информации выбора определяет то, составляет или нет допустимый запас Ts времени выбора, вычисленный на этапе S102, первое пороговое значение T1 или более. Модуль 55 задания информации выбора инструктирует обработке переходить к этапу S104, когда допустимый запас Ts времени выбора составляет первое пороговое значение T1 или более, и инструктирует обработке переходить к этапу S105, когда допустимый запас Ts времени выбора меньше первого порогового значения T1.
[0063] На этапе S104 модуль 55 задания информации выбора задает пункты для выбора и максимальное число вариантов выбора на основе возможного варианта действия в зависимости от допустимого запаса Ts времени выбора, вычисленного на этапе S102, и в силу этого задает информацию выбора, которая должна представляться пассажиру.
[0064] На этапе S105 модуль 55 задания информации выбора задает пункты для выбора, более простые, чем пункты для выбора на этапе S104, и максимальное число вариантов выбора, меньшее максимального числа вариантов выбора на этапе S104, в зависимости от допустимого запаса Ts времени выбора, вычисленного на этапе S102, и в силу этого может задавать информацию выбора, которая должна представляться пассажиру.
[0065] Два или более пороговых значений могут задаваться для допустимого запаса Ts времени выбора. Например, фиг. 17 иллюстрирует блок-схему последовательности операций способа в случае, если первое пороговое значение T1 и второе пороговое значение T2, меньшее первого порогового значения T1, задаются для допустимого запаса Ts времени выбора. Процессы на этапах S101, S102 и S104 на блок-схеме последовательности операций способа по фиг. 17 являются идентичными процессам на блок-схеме последовательности операций способа по фиг. 16.
[0066] На этапе S103, как проиллюстрировано на фиг. 18, модуль 55 задания информации выбора определяет то, составляет или нет допустимый запас Ts времени выбора, вычисленный на этапе S102, первое пороговое значение T1 или более. Модуль 55 задания информации выбора инструктирует обработке переходить к этапу S104, когда допустимый запас Ts времени выбора составляет первое пороговое значение T1 или более, и инструктирует обработке переходить к этапу S106, когда допустимый запас Ts времени выбора меньше первого порогового значения T1.
[0067] На этапе S106 модуль 55 задания информации выбора определяет то, составляет или нет допустимый запас Ts времени выбора, вычисленный на этапе S102, второе пороговое значение T2 или более. Модуль 55 задания информации выбора инструктирует обработке переходить к этапу S107, когда допустимый запас Ts времени выбора составляет второе пороговое значение T2 или более, и инструктирует обработке переходить к этапу S108, когда допустимый запас Ts времени выбора меньше второго порогового значения T2.
[0068] На этапе S107 модуль 55 задания информации выбора задает пункты для выбора, более простые, чем пункты для выбора на этапе S104, и максимальное число вариантов выбора, меньшее максимального числа вариантов выбора на этапе S104, в зависимости от допустимого запаса Ts времени выбора, вычисленного на этапе S102, и в силу этого может задавать информацию выбора, которая должна представляться пассажиру.
[0069] На этапе S108 модуль 55 задания информации выбора не задает информацию выбора таким образом, чтобы не представлять допустимый запас времени выбора и информацию выбора, и отменяет заданный возможный вариант действия. Альтернативно, модуль 55 задания информации выбора может задавать пункты для выбора, более простые, чем пункты для выбора на этапах S104 и S107, и максимальное число вариантов выбора, меньшее максимальных чисел вариантов выбора на этапах S104 и S107.
[0070] Приводится описание случая, когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени допустимого запаса по состоянию, со ссылкой на фиг. 19. Как проиллюстрировано в части (a) по фиг. 19, модуль 53 задания возможных вариантов действий определяет в позиции P1 то, что автономное транспортное средство C приближается к перекрестку, который представляет собой точку выполнения действия для выполнения левого поворота без нахождения другого транспортного средства впереди автономного транспортного средства C. В этом случае, модуль 54 вычисления допустимого запаса времени выбора вычисляет то, что допустимый запас Ts времени выбора составляет, например, 10 секунд, на основе степени допустимого запаса по состоянию, и модуль 60 представления представляет информацию выбора, удовлетворяющую допустимому запасу Ts времени выбора, пассажиру посредством использования дисплея 61 и динамика 62. Когда автономное транспортное средство C достигает позиции P3 завершения подготовки, модуль 60 представления представляет выполнение левого поворота пассажиру, и автономное транспортное средство C выполняет левый поворот.
[0071] Между тем, как проиллюстрировано в части (b) по фиг. 19, когда другое транспортное средство D находится впереди автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора (например, 7 секунд), меньший допустимого запаса времени выбора в случае, если другие транспортные средства не находятся впереди автономного транспортного средства C, на основе степени допустимого запаса по состоянию. Модуль 54 вычисления допустимого запаса времени выбора в силу этого может повышать точность допустимого запаса Ts времени выбора, который представляет собой время движения до точки, в которой должен завершаться выбор, с учетом другого транспортного средства D впереди автономного транспортного средства C.
[0072] Приводится описание случая, когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени возмущающего воздействия для периферии, со ссылкой на фиг. 20. Как проиллюстрировано в части (a) по фиг. 20, в состоянии, в котором другие транспортные средства не находятся позади автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет то, что допустимый запас Ts времени выбора составляет, например, 10 секунд, на основе степени возмущающего воздействия для периферии, и модуль 60 представления представляет информацию выбора, удовлетворяющую допустимому запасу Ts времени выбора, пассажиру посредством использования дисплея 61 и динамика 62.
[0073] Между тем, как проиллюстрировано в части (b) по фиг. 20, когда другое транспортное средство D находится позади автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора (например, 7 секунд), меньший допустимого запаса времени выбора в случае, если другие транспортные средства не находятся позади автономного транспортного средства C, на основе степени возмущающего воздействия для периферии. Модуль 54 вычисления допустимого запаса времени выбора в силу этого может повышать точность допустимого запаса Ts времени выбора, который представляет собой время движения до точки, в которой должен завершаться выбор, с учетом степени возмущающего воздействия для периферии.
[0074] Приводится описание случая, когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени затора на периферии, со ссылкой на фиг. 21. Как проиллюстрировано в части (a) по фиг. 21, в состоянии, в котором другие транспортные средства не находятся около автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет то, что допустимый запас Ts времени выбора составляет, например, 10 секунд, на основе степени затора на периферии, и модуль 60 представления представляет информацию выбора, удовлетворяющую допустимому запасу Ts времени выбора, пассажиру посредством использования дисплея 61 и динамика 62.
[0075] Между тем, как проиллюстрировано в части (b) по фиг. 21, когда другое транспортное средство D находится около автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора (например, 7 секунд), меньший допустимого запаса времени выбора в случае, если другие транспортные средства не находятся позади автономного транспортного средства C, на основе степени затора на периферии. Модуль 54 вычисления допустимого запаса времени выбора в силу этого может повышать точность допустимого запаса Ts времени выбора, который представляет собой время движения до точки, в которой должен завершаться выбор, с учетом степени затора на периферии.
[0076] Приводится описание случая, когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии, со ссылкой на фиг. 22. Как проиллюстрировано в части (a) по фиг. 22, модуль 53 задания возможных вариантов действий определяет в позиции P1 то, что автономное транспортное средство C приближается к перекрестку, который представляет собой точку выполнения действия для выполнения левого поворота без нахождения другого транспортного средства впереди автономного транспортного средства C. В этом случае, модуль 54 вычисления допустимого запаса времени выбора вычисляет то, что допустимый запас Ts времени выбора составляет, например, 10 секунд, на основе степени допустимого запаса по состоянию, и модуль 60 представления представляет информацию выбора, удовлетворяющую допустимому запасу Ts времени выбора, пассажиру посредством использования дисплея 61 и динамика 62. Когда автономное транспортное средство C достигает позиции P3 завершения подготовки, модуль 60 представления представляет выполнение левого поворота пассажиру, и автономное транспортное средство C выполняет левый поворот.
[0077] Между тем, как проиллюстрировано в части (b) по фиг. 22, когда другие транспортные средства D находится впереди и позади автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора (например, 5 секунд), меньший допустимого запаса времени выбора в случае, если используется одно из степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии, на основе степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии. Модуль 54 вычисления допустимого запаса времени выбора в силу этого может повышать точность допустимого запаса Ts времени выбора, который представляет собой время движения до точки, в которой выбор должен завершаться, посредством вычисления допустимого запаса Ts времени выбора посредством использования степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии.
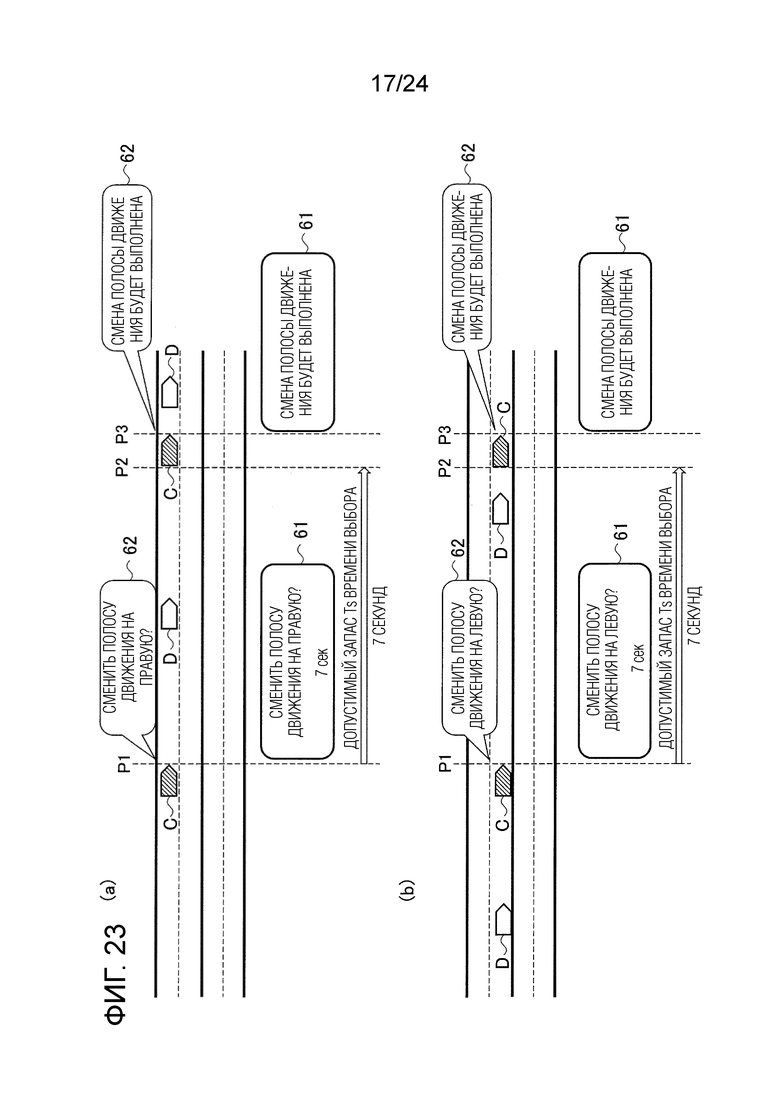
[0078] Приводится описание случая, когда возможный вариант действия представляет собой смену полосы движения, и модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии, со ссылкой на фиг. 23. Как проиллюстрировано в части (a) по фиг. 23, в состоянии, в котором другое транспортное средство D присутствует только впереди автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет то, что допустимый запас Ts времени выбора составляет, например, 7 секунд, на основе степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии. При достижении позиции P3 завершения подготовки, автономное транспортное средство C включает сигналы поворота и начинает смену полосы движения.
[0079] Между тем, как проиллюстрировано в части (b) по фиг. 23, когда другое транспортное средство D находится позади автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет то, что допустимый запас Ts времени выбора составляет, например, 7 секунд, на основе степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии. Другими словами, время движения до точки, в которой выбор должен завершаться, является идентичным в примерах, проиллюстрированных в частях (a) и (b) по фиг. 23.
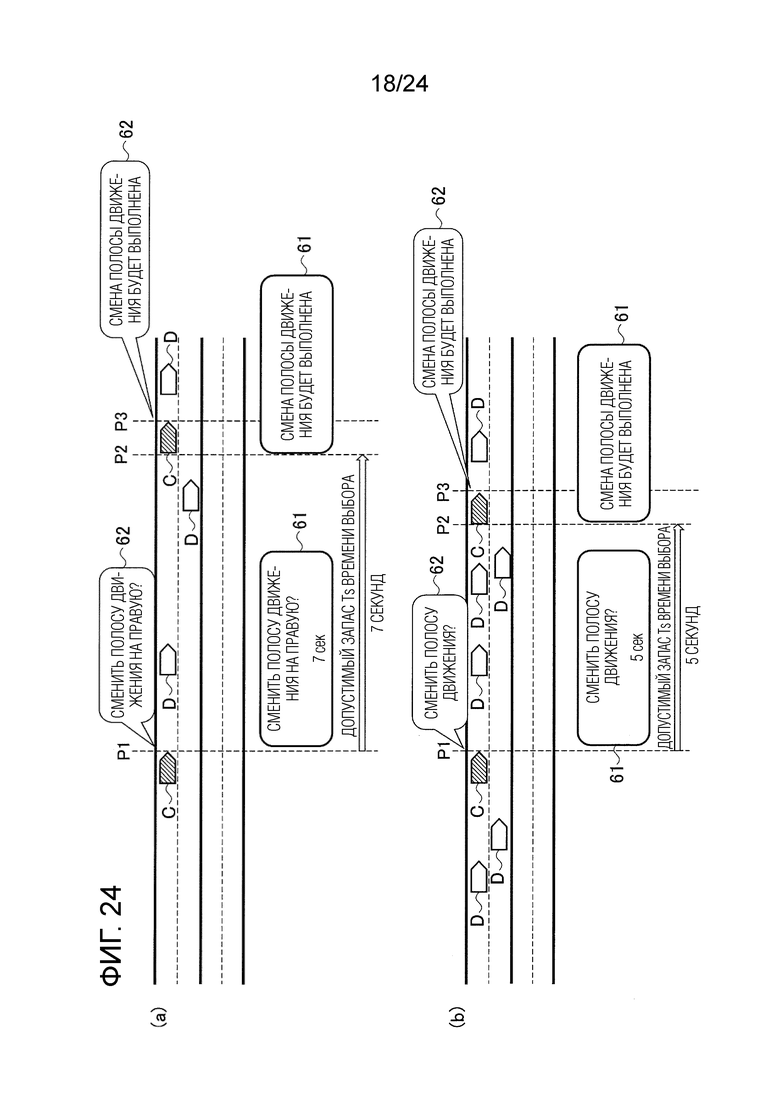
[0080] Приводится описание случая, когда возможный вариант действия представляет собой смену полосы движения, и модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии, со ссылкой на фиг. 24. Как проиллюстрировано в части (a) по фиг. 24, в состоянии, в котором два других транспортных средства D находятся впереди автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет то, что допустимый запас Ts времени выбора составляет, например, 7 секунд, на основе степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии.
[0081] Между тем, как проиллюстрировано в части (b) по фиг. 24, когда множество других транспортных средств D находятся около автономного транспортного средства C, модуль 54 вычисления допустимого запаса времени выбора вычисляет то, что допустимый запас Ts времени выбора составляет, например, 5 секунд, на основе степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии. Как описано выше, модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора таким образом, что чем больше число других транспортных средств D на периферии, тем меньше допустимый запас Ts времени выбора.
[0082] Способ вычисления допустимого запаса Ts времени выбора на основе степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии, когда автономное транспортное средство C является стационарным или движется со скоростью меньше предварительно определенной скорости (например, 10 км/ч), отличается от способа при нормальном движении (например, 10 км/ч или более).
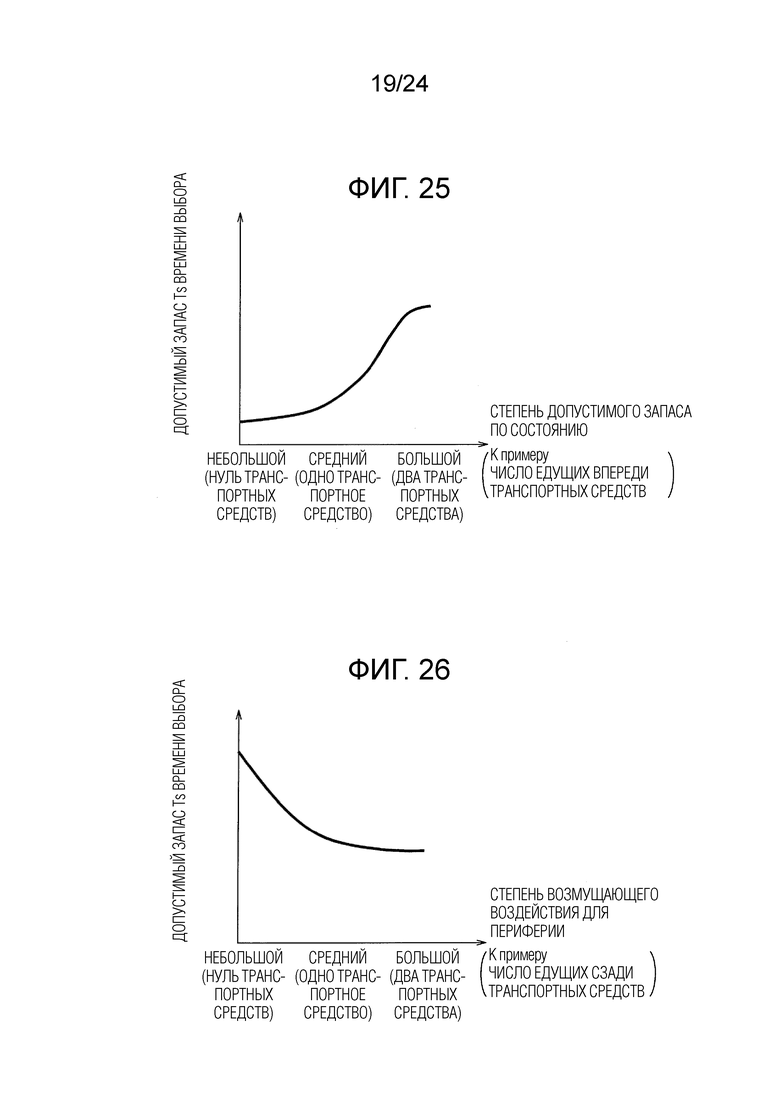
[0083] Например, как проиллюстрировано на фиг. 25, число других транспортных средств впереди автономного транспортного средства C может использоваться для определения степени допустимого запаса по состоянию. Когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени допустимого запаса по состоянию, чем больше число других транспортных средств впереди автономного транспортного средства C, тем больше допустимый запас Ts времени выбора.
[0084] Например, как проиллюстрировано на фиг. 26, число других транспортных средств позади автономного транспортного средства C может использоваться для определения степени возмущающего воздействия для периферии. Когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени возмущающего воздействия для периферии, чем больше число других транспортных средств позади автономного транспортного средства C, тем меньше допустимый запас Ts времени выбора.
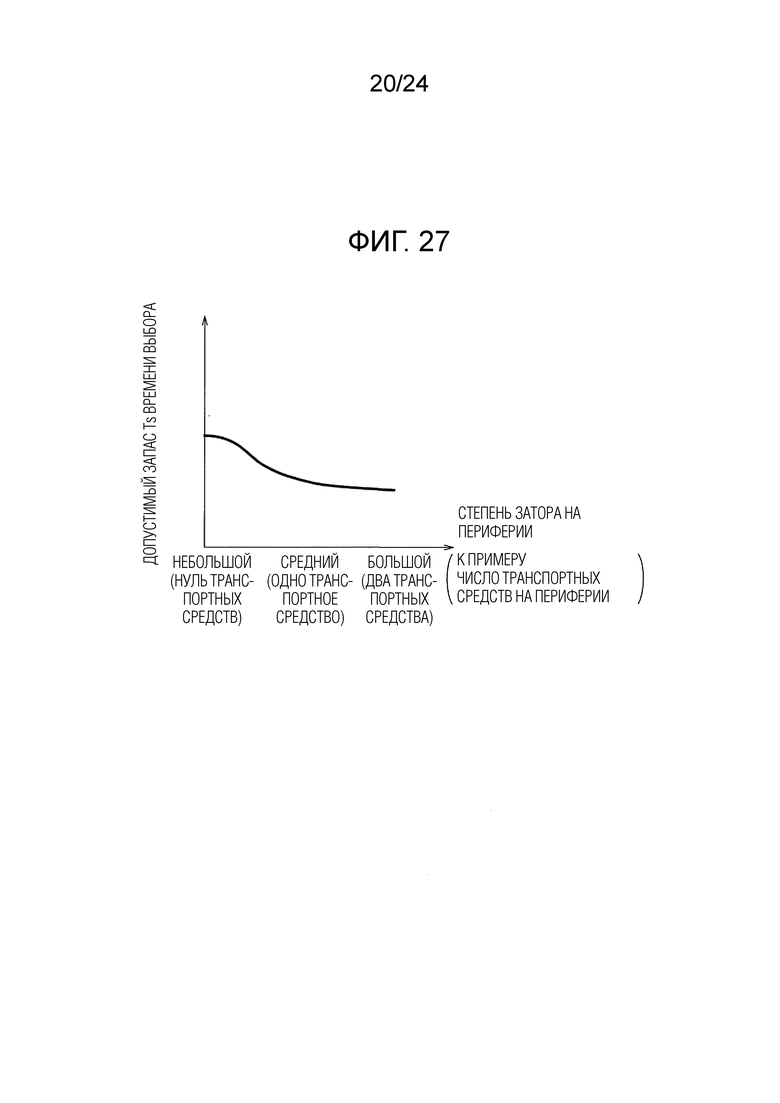
[0085] Например, как проиллюстрировано на фиг. 27, число других транспортных средств около автономного транспортного средства C, которые находятся в пределах предварительно определенной дальности от автономного транспортного средства C, может использоваться для определения степени затора на периферии. Когда модуль 54 вычисления допустимого запаса времени выбора вычисляет допустимый запас Ts времени выбора на основе степени затора на периферии, чем больше число других транспортных средств около автономного транспортного средства C, тем меньше допустимый запас Ts времени выбора.
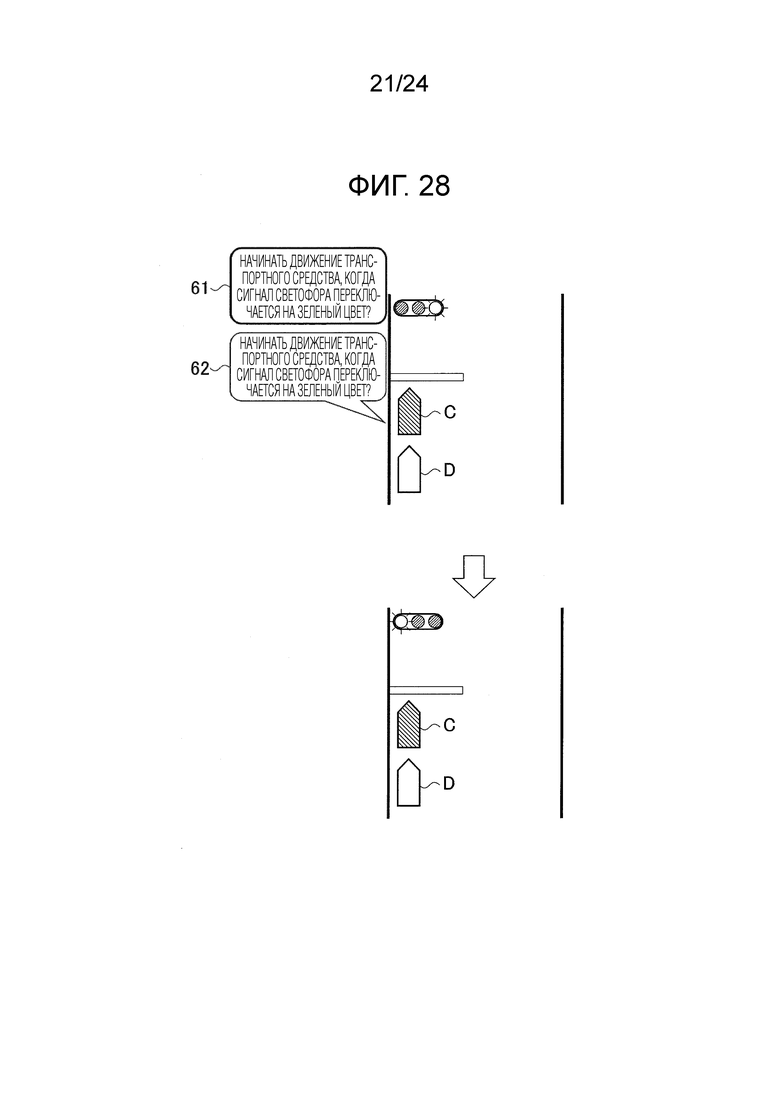
[0086] Фиг. 28 является схемой случая, в котором начало движения или отсутствие начала движения задаются в качестве возможного варианта действия, и допустимый запас Ts времени выбора практически равен 0 (равен или меньше второго порогового значения). Автономное транспортное средство C останавливается в позиции остановки первым в линии вследствие красного сигнала светофора. Поскольку допустимый запас Ts времени выбора практически равен 0, модуль 60 представления представляет, пассажиру, сообщение, такое как, например, "Начинать движение транспортного средства, когда сигнал светофора переключается на зеленый цвет?" и пункты для выбора, указывающие "Да" и "Нет" для этого сообщения в то время, когда сигнал светофора является красным. Пассажир в силу этого может выбирать то, следует или нет начинать движение автономного транспортного средства C до того, как сигнал светофора переключается на зеленый цвет.
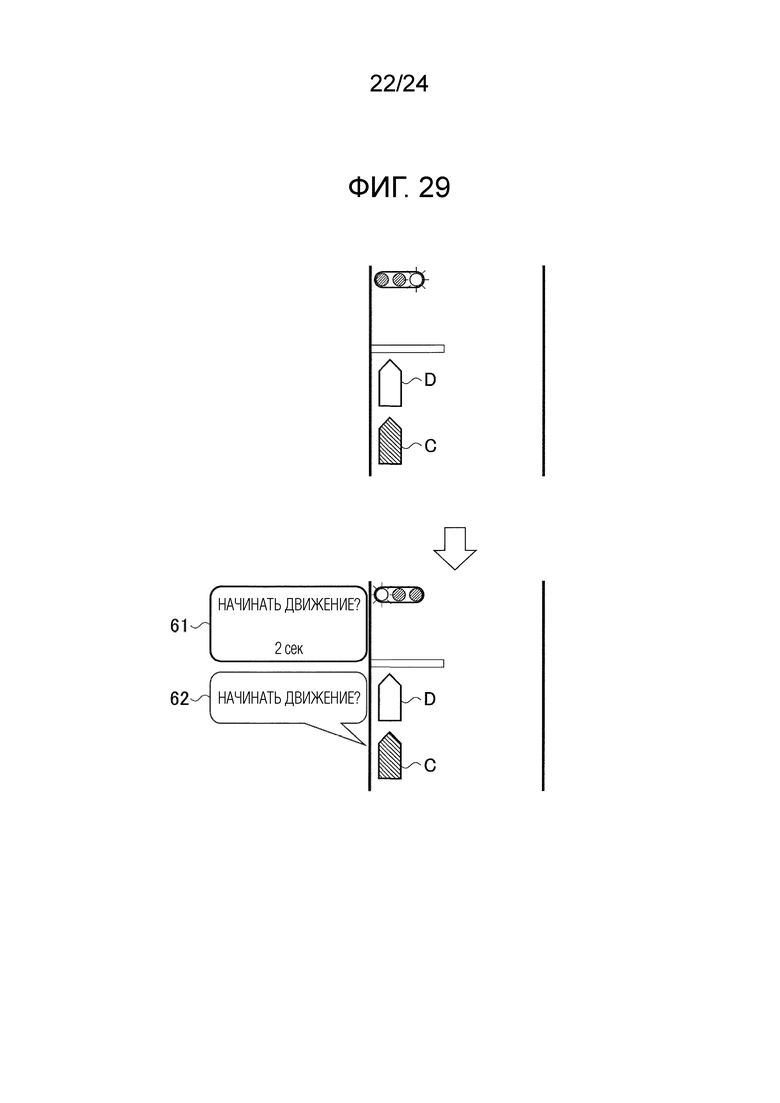
[0087] Фиг. 29 является схемой, поясняющей случай, в котором допустимый запас Ts времени выбора меньше первого порогового значения и составляет второе пороговое значение или более. Автономное транспортное средство C находится позади еще одного транспортного средства D. В этом случае, модуль 60 представления представляет, пассажиру, допустимый запас Ts времени выбора, простое сообщение, к примеру, "Начинать движение транспортного средства?", и пункты для выбора, указывающие "Да" и "Нет" для этого сообщения, в ответ на изменение сигнала светофора на зеленый цвет.
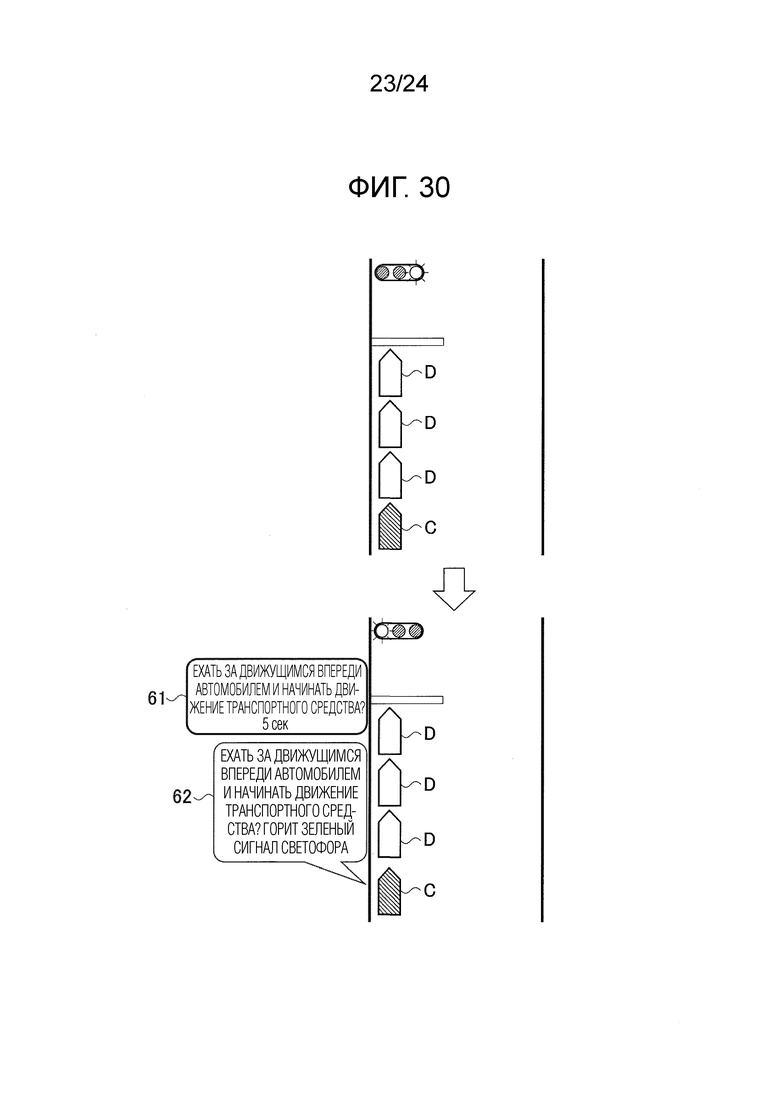
[0088] Фиг. 30 является схемой, поясняющей случай, в котором допустимый запас Ts времени выбора составляет первое пороговое значение или более. Автономное транспортное средство C находится позади нескольких других транспортных средств D. В этом случае, модуль 60 представления представляет, пассажиру, допустимый запас Ts времени выбора, относительно подробное сообщение, к примеру, "Ехать за движущимся впереди автомобилем и начинать движение транспортного средства?", и пункты для выбора, указывающие "Да" и "Нет" для этого сообщения, в ответ на изменение сигнала светофора на зеленый цвет.
[0089] В примерах, проиллюстрированных на фиг. 28-30, временной интервал представления информации выбора не ограничен временным интервалом сигнала светофора и, например, может представлять собой время, когда участник дорожного движения, такой как пешеход, блокирующий автономное транспортное средство C в направлении движения, уходит.
[0090] Как описано выше, устройство представления информации согласно второму варианту осуществления задает информацию выбора, которая должна представляться пассажиру в зависимости от допустимого запаса Ts времени выбора, и в силу этого может представлять, пассажиру, соответствующую информацию выбора, удовлетворяющую состоянию транспортного средства с учетом времени, необходимого для выбора информации.
[0091] Кроме того, устройство представления информации согласно второму варианту осуществления вычисляет допустимый запас Ts времени выбора на основе, по меньшей мере, одного из степени допустимого запаса по состоянию, степени возмущающего воздействия для периферии и степени затора на периферии, которые определяются в зависимости от состояния около автономного транспортного средства C, и в силу этого может с высокой точностью вычислять допустимый запас Ts времени выбора, который представляет собой время движения до точки, в которой должен завершаться выбор, с учетом состояния около автономного транспортного средства C.
[0092] Другие варианты осуществления
Хотя настоящее изобретение описано выше посредством использования вышеуказанных первого и второго вариантов осуществления, не следует понимать, что описание и чертежи, составляющие часть этого раскрытия сущности, ограничивают настоящее изобретение. Из этого раскрытия сущности, различные альтернативные варианты осуществления, примеры и рабочие технологии должны становиться очевидными для специалистов в данной области техники.
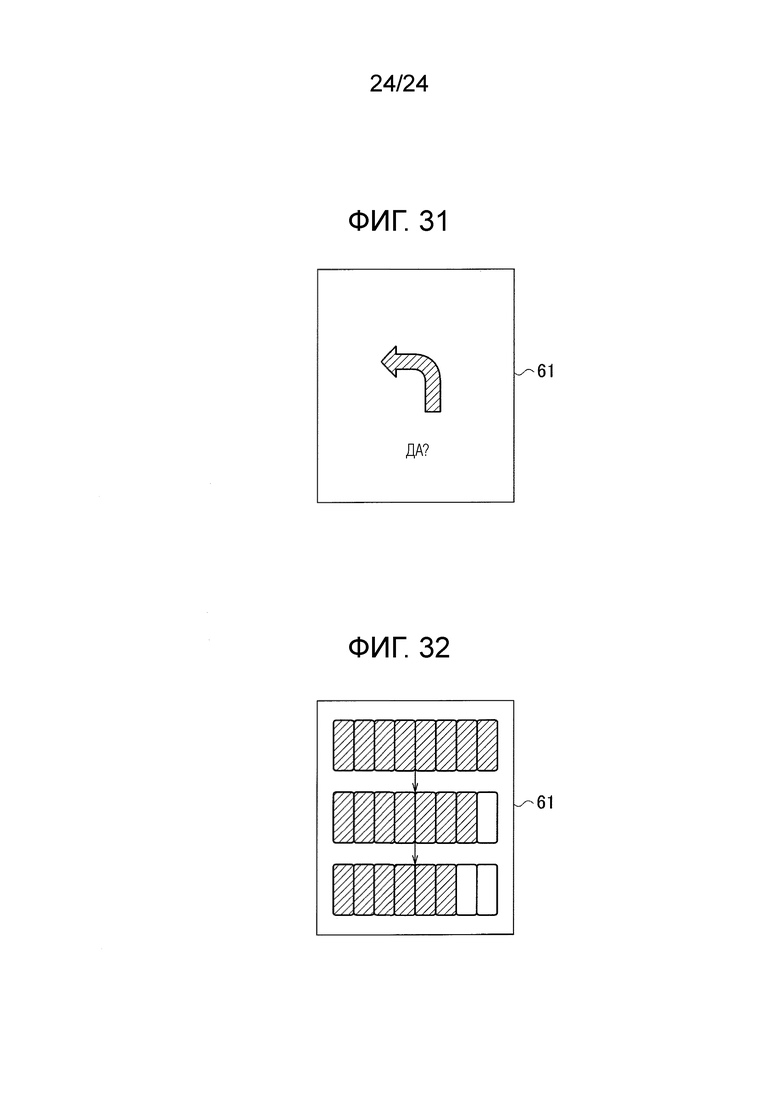
[0093] Например, в первом и втором вариантах осуществления, как проиллюстрировано на фиг. 31, модуль 60 представления может отображать, например, значок стрелки, идущей в направлении движения, на дисплее 61 в качестве пункта для выбора, указывающего выполнение или отсутствие выполнения левого поворота. Это дополнительно может уменьшать время, необходимое для пассажира, чтобы выяснять информацию выбора. Кроме того, как проиллюстрировано на фиг. 32, дисплей 61 может представлять допустимый запас Ts времени выбора посредством использования, вместо обратного отсчета с использованием арабских цифр, дисплей в виде измерительного прибора, подсвечиваемая область которого уменьшается. Кроме того, модуль 60 представления может изменять состояние представления допустимого запаса Ts времени выбора посредством регулирования длины, интервала, частоты и т.п. звука, воспроизводимого посредством динамика 62, либо посредством считывания допустимого запаса Ts времени выбора. Пассажир в силу этого может интуитивно выяснять допустимый запас Ts времени выбора.
[0094] Кроме того, первый и второй варианты осуществления могут иметь такую конфигурацию, в которой модуль 55 задания информации выбора определяет наиболее рекомендуемый пункт для выбора из пунктов для выбора, и когда пассажир выбирает пункт для выбора, отличный от наиболее рекомендуемого пункта для выбора, модуль 60 представления подтверждает содержимое выбора с помощью пассажира. Намерение пассажира в силу этого может подтверждаться, и можно уменьшать случай, в котором автономное транспортное средство C предпринимает действие, которое не предназначено пассажиром.
[0095] Кроме того, функции, описанные в первом и втором вариантах осуществления, могут выполняться посредством одной или более схем обработки. Схема обработки включает в себя программируемое обрабатывающее устройство, к примеру, обрабатывающее устройство, включающее в себя электрическую схему. Схема обработки может включать в себя такие устройства, как схемные компоненты и специализированная интегральная схема (ASIC), спроектированные с возможностью выполнять описанные функции.
[0096] Настоящее изобретение включает в себя различные варианты осуществления и т.п., которые не описываются в данном документе, к примеру, конфигурации, взаимно приспосабливающие вышеуказанные конфигурации, как и следовало ожидать. Соответственно, объем настоящего изобретения должен определяться только посредством предметов, задающих изобретение в пределах объема формулы изобретения, считающегося надлежащим на основе описания.
Список номеров ссылок
[0097] 51 - детектор состояния движения
52 - детектор периферийного состояния
53 - модуль задания возможных вариантов действий
54 - модуль вычисления допустимого запаса времени выбора
55 - модуль задания информации выбора
56 - контроллер представления
60 - модуль представления
80 - модуль ввода
C - автономное транспортное средство
D - другое транспортное средство
Группа изобретений относится к устройству и способу представления информации в автономном транспортном средстве. Устройство представления информации задает возможный вариант действия для осуществления автономным транспортным средством. Вычисляет допустимый запас времени выбора от текущего момента времени до момента времени, в который пассажир должен завершить выбор из информации выбора. Информацию выбора задает на основе возможного варианта действия в зависимости от допустимого запаса времени выбор, представляет заданную информацию выбора пассажиру и принимает выбор, который выполнен посредством операции пассажира. Обеспечивается представление информации выбора в зависимости от состояний транспортного средства. 2 н. и 15 з.п. ф-лы, 32 ил.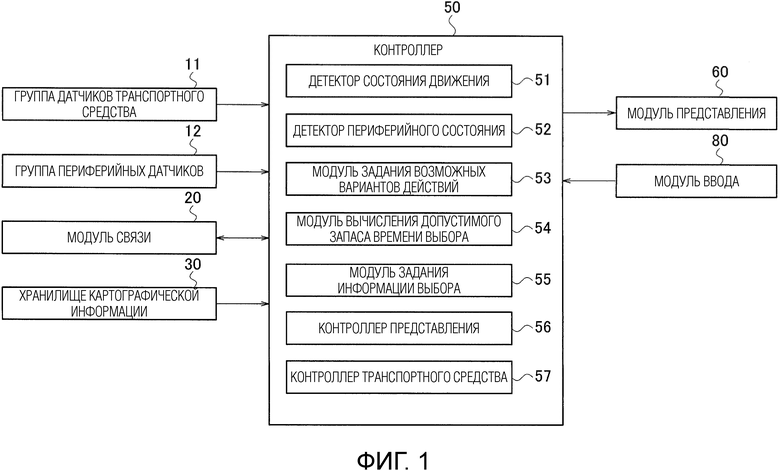
1. Устройство представления информации в автономном транспортном средстве, в котором возможный вариант действия для осуществления посредством транспортного средства задается на основе выбора пассажиром, причем устройство представления информации выполнено с возможностью представлять информацию выбора, из которой выбор выполняется пассажиром, содержащее:
модуль вычисления допустимого запаса времени выбора, выполненный с возможностью вычислять допустимый запас времени выбора на основе позиции, в которой начинается выполнение возможного варианта действия, выбранного из информации выбора пассажиром;
модуль задания информации выбора, выполненный с возможностью задавать информацию выбора в зависимости от допустимого запаса времени выбора;
модуль представления, выполненный с возможностью представлять информацию выбора, заданную посредством модуля задания информации выбора, пассажиру; и
модуль ввода, выполненный с возможностью принимать выбор из информации выбора, представленной посредством модуля представления, который выполняется посредством операции пассажира.
2. Устройство представления информации по п. 1, содержащее модуль задания возможных вариантов действий, выполненный с возможностью задавать возможный вариант действия для автономного транспортного средства, при этом модуль задания информации выбора задает информацию выбора на основе возможного варианта действия в зависимости от допустимого запаса времени выбора.
3. Устройство представления информации по п. 2, в котором модуль задания информации выбора задает информацию выбора посредством задания пунктов для выбора и максимального числа вариантов выбора на основе возможного варианта действия в зависимости от допустимого запаса времени выбора.
4. Устройство представления информации по п. 3, в котором модуль задания информации выбора задает пункты для выбора таким образом, что чем меньше допустимый запас времени выбора, тем более простыми являются пункты для выбора.
5. Устройство представления информации по п. 3 или 4, в котором модуль задания информации выбора задает максимальное число вариантов выбора таким образом, что чем меньше допустимый запас времени выбора, тем меньше максимальное число вариантов выбора.
6. Устройство представления информации по п. 3 или 4, в котором модуль задания информации выбора задает информацию выбора на основе возможного варианта действия, связанного, по меньшей мере, с одним из поворота, смены полосы движения, движения в режиме оптимального регулирования скорости, выезда из потока и въезда в поток.
7. Устройство представления информации по п. 3 или 4, в котором:
модуль задания информации выбора определяет наиболее рекомендуемый пункт для выбора из пунктов для выбора, и
когда пассажир выбирает пункт для выбора, отличный от наиболее рекомендуемого пункта для выбора, модуль представления подтверждает содержимое выбора с помощью пассажира.
8. Устройство представления информации по любому из пп. 1-4, в котором модуль представления представляет допустимый запас времени выбора и информацию выбора пассажиру.
9. Устройство представления информации по п. 8, в котором модуль представления изменяет состояние представления допустимого запаса времени выбора в зависимости от допустимого запаса времени выбора.
10. Устройство представления информации по п. 2, в котором модуль вычисления допустимого запаса времени выбора вычисляет допустимый запас времени выбора на основе расстояния от текущей позиции автономного транспортного средства до точки выполнения действия, в которой выполняется возможный вариант действия.
11. Устройство представления информации по п. 2, в котором модуль вычисления допустимого запаса времени выбора вычисляет допустимый запас времени выбора на основе степени допустимого запаса по состоянию, определенной из числа других транспортных средств впереди автономного транспортного средства и из расстояния от текущей позиции автономного транспортного средства до точки выполнения действия, в которой выполняется возможный вариант действия.
12. Устройство представления информации по любому из пп. 1-4, 10 и 11, в котором модуль вычисления допустимого запаса времени выбора вычисляет допустимый запас времени выбора на основе степени возмущающего воздействия для периферии, определенной из числа других транспортных средств позади автономного транспортного средства.
13. Устройство представления информации по любому из пп. 1-4, 10 и 11, в котором модуль вычисления допустимого запаса времени выбора вычисляет допустимый запас времени выбора на основе степени затора на периферии, определенной из числа других транспортных средств около автономного транспортного средства.
14. Устройство представления информации по любому из пп. 1-4, 10 и 11, в котором модуль задания информации выбора задает информацию выбора в зависимости от транспортных средств около автономного транспортного средства.
15. Устройство представления информации по любому из пп. 1-4, 10 и 11, в котором:
модуль представления продолжает представление информации выбора в течение допустимого запаса времени выбора, и
модуль ввода обеспечивает возможность повторного выбора из информации выбора в течение допустимого запаса времени выбора.
16. Устройство представления информации по любому из пп. 1-4, 10 и 11, в котором модуль представления представляет информацию выбора пассажиру посредством использования, по меньшей мере, одного из изображения и звука.
17. Способ представления информации в устройстве представления информации в автономном транспортном средстве, в котором возможный вариант действия для осуществления посредством транспортного средства задается на основе выбора пассажиром, причем устройство представления информации выполнено с возможностью представлять информацию выбора, из которой выбор выполняется пассажиром, причем способ представления информации содержит этапы, на которых:
вычисляют допустимый запас времени выбора на основе позиции, в которой начинается выполнение возможного варианта действия, выбранного из информации выбора пассажиром;
задают информацию выбора в зависимости от допустимого запаса времени выбора;
представляют заданную информацию выбора пассажиру; и
принимают выбор из представленной информации выбора, который выполнен посредством операции пассажира.
| DE 102013110909 A1, 02.04.2015 | |||
| МОДУЛЬ И СПОСОБ, ОТНОСЯЩИЕСЯ К ВЫБОРУ РЕЖИМА ПРИ ОПРЕДЕЛЕНИИ ЗНАЧЕНИЙ КОНТРОЛЬНОЙ ТОЧКИ СКОРОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2556829C2 |
| US 20150149088 A1, 28.05.2015 | |||
| JP 2013196359 A, 30.09.2013. | |||

