Область техники, к которой относится изобретение
Настоящее раскрытие относится к способам передачи и приема передачи в радиосети. Более конкретно, раскрытие касается способа регулировки свойств передачи, связанных с передачей данных. Кроме того, раскрытие относится к приемо-передающему узлу в радиосети и соответствующей компьютерной программе.
Уровень техники
В современных системах мобильной связи используется несколько стандартов связи, известных как универсальная система мобильной связи (UMTS) и долгосрочное развитие (LTE). Проект партнерства в области связи третьего поколения (3GPP), действующий в LTE, упоминается также как развитая сеть наземного радиодоступа (E-UTRAN). LTE - это технология, предназначенная для реализации высокоскоростной пакетной связи, которая может достигать высоких скоростей передачи данных как в нисходящей линии связи, так и в восходящей линии связи, и по отношению к UMTS рассматривается как система мобильной связи следующего поколения. Для того чтобы поддерживать высокие скорости передачи данных, LTE позволяет использовать ширину полосы пропускания системы 20 МГц или вплоть до 100 МГц в случае, когда применяется агрегация несущих с использованием OFDM в качестве типа модуляции. LTE также способна работать в различных диапазонах частот и может работать по меньшей мере в режимах дуплексной связи с частотным разделением каналов (FDD) и дуплексной связи с временным разделением каналов (TDD).
Гибридный автоматический запрос повторной передачи (HARQ) является неотъемлемой частью стандартов 3G и 4G, которые обеспечивают надежную связь между беспроводным устройством и сетевым узлом посредством возрастающей избыточности. Транспортный блок, подлежащий передаче, подвергается кодированию с исправлением ошибок с упреждением, в результате чего вносится избыточность. Количество бит увеличивается вследствие внесенной избыточности, но не все биты отправляются одновременно. Результирующие биты сегментируются в несколько версий избыточности, где каждая такая версия избыточности содержит одинаковый набор информационных бит, но различные наборы битов контроля четности. Затем перед отправкой версии избыточности прокалываются для того, чтобы соответствовать ей в пределах заданного выделения (одной или более пар ресурсных блоков). В этом смысле "прокалывание" является термином, используемым в теории кодирования, при котором некоторые биты контроля по четности удаляются после кодирования с использованием кода с исправлением ошибок. То, сколько бит прокалывается, зависит от того, сколько бит (информационных плюс избыточных бит) можно переносить при выделении, что в дальнейшем зависит от ширины полосы пропускания выделения, используемой модуляции (например, QPSK, 16QAM, 256QAM) и наличия широковещательных сигналов и каналов в выделенной полосе пропускания. Отношение информационных бит к информационным битам плюс избыточные биты в транспортном блоке называется кодовой скоростью. При хороших условиях радиосвязи кодовая скорость может быть близка к 1 (очень маленькая избыточность), и она уменьшается с ухудшением условий радиосвязи (постепенное повышение избыточности информации). Комбинация кодовой скорости и типа модуляции упоминается как схема модуляции и кодирования или вкратце MCS. MCS и другие параметры, влияющие на надежность передачи, относятся к свойствам передачи.
На практике неправильно принятые кодированные блоки данных часто сохраняются в приемнике, а не отбрасываются, и после приема повторно переданного блока два блока объединяются. Хотя возможно, что две заданные передачи нельзя декодировать независимым образом без ошибок, возможен случай, когда объединение ошибочно принятых ранее передач предоставляет достаточно информации для правильного декодирования. Этот подход называется гибридным ARQ с мягким объединением, в котором возрастающая избыточность представляет собой возможность для такого мягкого объединения.
Возрастающая избыточность позволяет приемному узлу, например, пользовательскому устройству, пытаться принимать и декодировать первую версию избыточности транспортного блока. В случае неудачного приема, он принимает вторую версию избыточности транспортного блока, которая объединена с первым принятым блоком и снова декодирует. В случае, если требуется повторная передача того же самого транспортного блока, такое происходит обычно с минимальным интервалом 8 мс. В некоторых случаях используются такие функции, как группирование TTI, посредством которых несколько версий избыточности передаются в следующих подкадрах, не дожидаясь сигнала обратной связи относительно того, была ли успешно реализована предыдущая версия избыточности.
Приемный объект обеспечивает подтверждение для передающего объекта относительно того, успешно ли он декодировал транспортный блок (ACK), или был ли сбой (NACK). Затем передающий объект может принять решение относительно того, передавать ли другую версию избыточности для того же самого блока или отправить версию избыточности для следующего транспортного блока.
В случае, когда количество повторных передач достигает максимального значения при отсутствии возможности декодирования транспортного блока приемным блоком, он будет декодироваться на более высоких уровнях, например, используя управление линией радиосвязи (RLC), как правило, в течение 50-100 мс, когда отсутствует блок данных протокола (PDU), и повторная передача запрашивается для всех транспортных блоков, которые содержат PDU RLC, даже для тех, которые могут быть успешно декодированы. Это называется автоматическим запросом повторной передачи (ARQ) и имеет значительно большую задержку, чем повторные передачи HARQ.
В сети LTE беспроводное устройство (в LTE упоминается как пользовательское оборудование (UE)) выполняет измерения для предоставления указаний в базовую станцию (в LTE eNodeB) при выявленных условиях распространения радиоволн в так называемом отчете об индикаторе качества канала (CQI). Основываясь на отчетности, базовая станция может условно принять решение относительно схемы модуляции и кодирования, которые используются для поддержания связи с UE. Пример сопоставления между CQI и MCS представлен ниже в таблице 1, воспроизведенной из стандарта 3GPP TS 36.213 V10.12.0 раздел 7.2.3. При низком качестве канала (малый индекс CQI) для успешного декодирования информационных битов требуется более интенсивное кодирование с исправлением ошибок с упреждением, и, наоборот, при высоком качестве канала, то есть при высоком индексе CQI, требуется менее интенсивное кодирование с исправлением ошибок с упреждением. Следовательно, при высоком CQI пропускная способность информационных битов может быть выше, чем при низком CQI.
Таблица 1. Таблица 4-разрядных CQI из 3GPP
Для того, чтобы получить хорошую пропускную способность системы, eNodeB выполняет адаптацию линии связи, сопоставляя каждый отчет о качестве канала, отправленный UE, с MCS, которая обеспечивает правильный баланс между пропускной способностью системы и пропускной способностью для отдельного пользователя. MCS указывается в UE в управляющей информации нисходящей линии связи (DCI), предоставленной по физическому каналу управления данными (PDCCH), как показано в таблице 2, воспроизведенной из 3GPP TS 36.213 V10.12.0 раздел 7.1.7.1.
Таблица 2. Таблица индексов модуляции и TBS для PDSCH



В дополнение к отчетности CQI, eNodeB обычно имеет внешний контур, который настраивает значение MCS на основе отчетов ACK/NACK на подходящее значение, обеспечивающее BLER (отношение между NACK и общим количеством принятых или ожидаемых ACK/NACK), равное, например, 10%. Помимо обеспечения функциональной гибкости, при которой используется целевой BLER (например, 1%, 10%, 30%), он также решает проблему, что каждая модель UE или даже UE одной и той же модели могут иметь индивидуальное смещение в переданном отчете CQI. Таким образом, базовая станция поддерживает смещение CQI, характерное для UE, которое она настраивает, чтобы выдать желаемую цель BLER.
В случае UE с чрезмерными требованиями к надежной связи с низкой задержкой, например, с остаточным BLER порядка 10-9 и задержкой порядка 20 мс (то есть максимум одному транспортному блоку на миллиард разрешается иметь задержку, превышающую 20 мс), блочные ошибки на уровне MAC следует избегать в максимально возможной степени. Каждая блочная ошибка увеличивает риск сбоя при объединении HARQ MAC, что приводит к повторной передаче RLC (RLC ARQ), обычно связанной с задержкой 100 мс или более. Это связано с тем, что RLC должен ожидать некоторого время после того, как он обнаружил, что пакет был доставлен в нерабочем состоянии (сконфигурированный сетевым оператором) прежде, чем он может прийти к выводу, что PDU MAC был потерян, и может запросить повторную передачу.
Существующая реализация HARQ поддерживает только двоичную отчетность относительно того, был ли правильно декодирован транспортный блок, то есть получены ли ACK или NACK. Это означает, что операцию определения и компенсации уникального смещения CQI нельзя выполнить без увеличения риска возникновения блочных ошибок на уровне MAC HARQ, что может привести к увеличению задержки, так как каждая неудачная повторная передача HARQ занимает дополнительно по меньшей мере 8 мс. Причина состоит в том, что, когда блок правильно декодирован, положительное подтверждение (ACK) не будет сообщать отправителю то, насколько близко к своему пределу была операция декодирования, то есть была или нет ошибка, допускающая исправления.
Существующая реализация затрудняет сетевому узлу идентификацию смещения CQI, так как такая операция может привести к нарушению требований к задержке и/или требований к надежности. В результате, eNodeB должен сконфигурировать передачи DL и UL, используя гораздо более надежную MCS, чем требуется, чтобы не рисковать внесением задержек и/или блочных ошибок на уровне RLC. Более надежная MCS приводит к более высокому использованию ресурсов для конкретного UE, чем необходимо, с меньшим количеством ресурсов, доступных для других UE в соте, тем самым снижая общую пропускную способность системы.
Раскрытие сущности изобретения
Таким образом, существует потребность в способе, который предусматривает более гибкий подход.
Способ регулировки свойств передачи, связанных с передачей данных, выполняется в передающем узле радиосети. Способ содержит этапы, на которых передают первый транспортный блок с использованием набора свойств транспортной передачи на приемный узел. Зондирующий блок передается на приемный узел с использованием набора свойств зондирующей передачи, что приводит к пониженной надежности по отношению к набору свойств транспортной передачи, используемых для первого транспортного блока. Способ также содержит реконфигурирование набора свойств транспортной передачи для дополнительных транспортных блоков на основе информации, переданной приемным узлом и указывающей на успешное декодирование зондирующего блока приемным узлом. Предложенный способ позволяет реконфигурировать свойства передачи для того, чтобы высвободить ресурсы при сохранении требований к надежной связи с низкой задержкой. Это достигается за счет передачи зондирующего блока и оценки сигнала обратной связи, указывающего на успешное декодирование зондирующего блока.
В дополнительном аспекте способ может также содержать передачу второго транспортного блока с использованием свойств транспортной передачи после передачи зондирующего блока. Другими словами, зондирующий блок передается между первым и вторым транспортными блоками. Альтернативно или дополнительно, можно также принимать информацию, указывающую на успешное декодирование первого транспортного блока. Это позволит гибко выполнять зондирование за счет передачи зондирующего блока во время нормальной передачи данных.
В одном аспекте реконфигурирование содержит регулировку по меньшей мере части из набора свойств транспортной передачи для согласования соответствующей части из набора свойств зондирующей передачи. В качестве альтернативы, регулируется по меньшей мере часть из набора свойств транспортной передачи, что вызывает и/или приводит к надежности передачи ниже, чем надежность передачи набора свойств транспортной передачи, используемых при передаче первого транспортного блока, но выше, чем надежность передачи набора свойств зондирующей передачи. В связи с этим свойства передачи могут содержать, например, схему модуляции и кодирования, технологию радиодоступа, один или более режимов передачи "многоканальный вход - многоканальный выход", формирование луча, матрицу прекодирования, мощность передачи или любой другой параметр передачи, который влияет на надежность передачи.
В одном аспекте зондирующий блок содержит, данные полезной нагрузки, которые также включены в транспортный блок, использующий набор свойств транспортной передачи. Другими словами, зондирующий блок содержит те же самые данные полезной нагрузки, которые были уже запланированы или планируются для передачи в приемный узел в транспортном блоке. Полезная нагрузка в зондирующем блоке может быть отброшена после декодирования зондирующего блока и подтверждения успешного декодирования.
В дополнительном аспекте зондирующий блок, содержащий данные полезной нагрузки, равные полезной нагрузке транспортного блока, передается после приема приемным узлом сообщения, указывающего на успешное декодирование упомянутого транспортного блока. Так как включенная полезная нагрузка уже была успешно декодирована приемным узлом, приемный узел может отбросить зондирующий блок независимо от того, правильно ли декодирован зондирующий блок, таким образом только временно выделяя ресурсы для зондирования. В некоторых аспектах переход зондирующего блока происходит сразу после или перед передачей транспортного блока. Это позволяет отправлять зондирующий блок, не дожидаясь подтверждения приема данных полезной нагрузки.
В еще одном аспекте способ дополнительно содержит планирование данных полезной нагрузки, которые должны быть отправлены в соответствующие временные интервалы, и планирование зондирующего блока, который должен быть передан во время одного из этих временных интервалов. Чтобы компенсировать временной интервал, используемый для передачи зондирующего блока, данные полезной нагрузки, запланированные в одни временные интервалы, объединяются с данными полезной нагрузки, запланированными в следующем временном интервале. Второй транспортный блок генерируется с использованием объединенной полезной нагрузки. В одном аспекте следующий временной интервал представляет собой временной интервал, который сразу следует за предыдущим временным интервалом. Это позволит в среднем обеспечить непрерывную передачу данных, что в то же время позволит проводить зондирование.
В другом аспекте каждый из транспортных блоков содержит первый идентификатор, связанный с приемным узлом, и зондирующий блок содержит второй идентификатор, связанный с приемным узлом. В одном аспекте третий транспортный блок передается во время, когда передается зондирующий блок. В связи с этим третий транспортный блок и зондирующий блок могут содержать различные идентификаторы. Следовательно, одновременно используются два идентификатора, связанные с одинаковым приемным узлом - один для регулярного потока данных, а другой для зондирования. Это приводит к непрерывному регулярному потоку данных в приемный узел.
В одном аспекте свойства зондирующей передачи выбираются в ответ на частоту появления ошибок на уровне блока, причем упомянутая требуемая частота появления ошибок на уровне блока смещается на частоту появления ошибок на уровне блока в индикаторе качества канала, переданного приемным узлом. Такой подход позволяет приемному узлу выполнить требования к задержке и BLER эффективным образом с точки зрения использования ресурсов.
Предложенный способ можно использовать в базовой станции, а также в пользовательском оборудовании в условиях эксплуатации радиосети. Следовательно, в одном аспекте этап передачи зондирующих блоков выполняется в ответ на соответствующий запрос приемным узлом. В другом аспекте принимается список запланированных временных интервалов, в течение которых должен передаваться по меньшей мере один из первого и второго транспортных блоков или зондирующего блока. В примере оба аспекта применимы к пользовательскому устройству в качестве передающего узла в радиосети.
В другом аспекте предложен способ обработки информации о качестве транспортных блоков. Упомянутый способ выполняется в приемном узле радиосети и содержит этапы, на которых принимают первый транспортный блок с использованием набора свойств транспортной передачи. Зондирующий блок принимается с использованием набора свойств передачи зондирующих блоков, содержащих пониженную надежность по отношению к набору свойств транспортной передачи, используемых для первого транспортного блока. В ответ на декодирование зондирующего блока приемный узел передает подтверждение, и декодированный зондирующий блок отбрасывается.
Так как зондирующий блок отбрасывается после его декодирования, данные полезной нагрузки не обрабатываются на более высоких уровнях, тем самым экономя время обработки и сокращая затраты. В частности, зондирующий блок может быть отброшен независимо от результата процесса декодирования, то есть от того, успешно или нет был декодирован блок. В одном аспекте передается информация, показывающая успешное декодирование первого транспортного блока. Кроме того, второй транспортный блок принимается после приема зондирующего блока. Другими словами, зондирующий блок принимается между приемом первого и второго транспортных блоков, соответственно. В связи с этим второй транспортный блок может содержать объединенные данные полезной нагрузки, причем упомянутые объединенные данные полезной нагрузки содержат данные полезной нагрузки, запланированные для передачи в период времени, в течение которого был передан зондирующий блок, и данные полезной нагрузки, запланированные для передачи после передачи зондирующего блока.
В одном аспекте зондирующий блок содержит данные полезной нагрузки, которые были уже включены в транспортный блок. Альтернативно, зондирующий блок может содержать заданные данные полезной нагрузки. Несмотря на другие меры для оценки того, правильно ли был декодирован зондирующий блок, известные данные полезной нагрузки позволяют приемному узлу быстро выполнить дополнительную проверку на согласованность перед их отбрасыванием. Для того, чтобы еще больше повысить надежность и сократить непроизводительные затраты на обработку, перед приемом упомянутых данных в зондирующем блоке может быть передано подтверждение для данных в принятом транспортном блоке.
В некоторых других аспектах каждый транспортный блок содержит первый идентификатор, связанный с приемным узлом, и зондирующий блок содержит второй идентификатор, связанный с приемным узлом. Использование двух идентификаторов, связанных с приемным узлом, позволяет приемному узлу принимать транспортные блоки по существу непрерывным образом без прерывания приема зондирующих блоков. В одном аспекте третий транспортный блок может быть принят в период времени, в течение которого принимается зондирующий блок, при этом блоки могут иметь различные идентификаторы.
Оба метода могут применяться в различных стандартах радиосети. Например, первый узел в радиосети, использующей стандарт радиосети, выполнен с возможностью выполнения одного или более аспектов способа регулировки свойств передачи, в то время как второй узел в радиосети выполнен с возможностью выполнения способа обработки информации о качестве. Компьютерная программа, содержащая код компьютерной программы, может вызывать выполнение узлом радиосети одного или более из вышеупомянутых аспектов при их исполнении в программируемом контроллере упомянутого узла. Кроме того, первый и второй зондирующие блоки можно передавать, например, по каналу для передачи данных полезной нагрузки, в частности, по физическому совместно используемому каналу нисходящей линии связи (PDSCH) или физическому совместно используемому каналу восходящей линии связи (PUSCH) в соответствии со стандартом LTE. На сегодняшний день используется текущий стандарт LTE версии 12, серии 36 с марта 2015, и его можно найти на сайте ftp://ftp.3gpp.org/Specs/2015-03/Rel-12/36_series/, который включен сюда путем ссылки.
В еще одном аспекте передающий узел в радиосети содержит модуль данных, зондирующий модуль, модуль связи и модуль свойств передачи. Модуль данных выполнен с возможностью обеспечения первого и второго транспортных блоков, каждый из которых содержит данные полезной нагрузки, использующие набор свойств транспортной передачи. Модуль зондирования выполнен с возможностью обеспечения зондирующего блока с использованием набора свойств зондирующей передачи, причем упомянутые свойств передачи зондирующих блоков содержат пониженную надежность по отношению к набору свойств транспортной передачи. Модуль связи выполнен с возможностью передачи первого и второго транспортных блоков в соответствующих временных интервалах и зондирующего блока во временном интервале между соответствующими временными интервалами в приемный узел. Модуль свойств передачи выполнен с возможностью реконфигурирования набора свойств транспортной передачи в ответ на успешное подтверждение декодирования зондирующего блока, выполненного приемным узлом.
В соответствии с этим аспектом передающий узел позволяет отрегулировать первый набор параметров передачи на менее надежную передачу, который, тем не менее, удовлетворяет требованиям к задержке и другим параметрам качества передачи. Следовательно, имеющиеся ресурсы будут использоваться более эффективно, и свойства передачи можно изменять более гибко в ответ на изменения условий эксплуатации. В дополнительном аспекте модуль свойств передачи выполнен с возможностью регулировки по меньшей мере части из набора свойств транспортной передачи для согласования соответствующей части из набора свойств зондирующей передачи. В результате, передающий узел использует свойства передачи, оцененные и протестированные во время любой операции зондирования.
В одном аспекте модуль зондирования передающего узла выполнен с возможностью обеспечения зондирующего блока содержащего данные полезной нагрузки, включенные в один из транспортных блоков. В еще одном аспекте модуль связи можно выполнить с возможностью передачи зондирующего блока после приема положительного подтверждения транспортного блока, содержащего упомянутые данные полезной нагрузки, приемным узлом. Это позволяет обеспечить некоторую форму приоритизации в той степени, в которой используется известная полезная нагрузка данных зондирования, для которых принято положительное подтверждение. Упомянутая полезная нагрузка известна приемному узлу и поэтому может быть отброшена независимо от того, успешно или нет декодирован зондирующий блок.
Дополнительный аспект относится к передаче транспортных блоков запланированным способом. В этом аспекте модуль данных содержит планировщик, выполненный с возможностью планирования данных полезной нагрузки, подлежащих отправке в соответствующие временные интервалы. Модуль данных также содержит устройство объединения, выполненное с возможностью объединения данных полезной нагрузки, запланированных для отправки во время передачи зондирующих данных, и данных полезной нагрузки, запланированных в следующем временном интервале. В связи с этим, устройство объединения можно выполнить с возможностью объединения полезной нагрузки и планирования полезной нагрузки для передачи, в частности, во временном интервале, который следует сразу после передачи зондирующих данных. Модуль упаковки обеспечивает транспортный блок, содержащий упомянутые упакованные данные полезной нагрузки. В соответствии с этим аспектом передающий узел может обеспечить функциональные возможности зондирования, при которых зондирующие блоки планируется отправлять в течение заданных периодов времени. Чтобы обеспечить по существу непрерывную передачу полезной нагрузки, предусмотрено устройство объединения, объединяющее данные полезной нагрузки в случае, когда данные полезной нагрузки планируются в периоды времени, в течение которых планируется зондирующий блок. Другими словами, устройство объединения обеспечивает объединение двух пакетов полезной нагрузки в одном транспортном блоке для передачи.
В другом аспекте модуль данных выполнен с возможностью обеспечения транспортных блоков, имеющих первый идентификатор, связанный с приемным узлом, и зондирующего блока, имеющего второй идентификатор, связанный с приемным узлом. Модуль связи можно выполнить с возможностью одновременной передачи третьего транспортного блока и зондирующего блока. Ассоциирование двух идентификаторов с одним и тем же приемным узлом позволяет передающему узлу по существу непрерывно передавать транспортные блоки без прерывания такой передачи в результате зондирования.
В некоторых случаях модуль связи выполнен с возможностью передачи зондирующего блока, следующего непосредственно перед или после транспортного блока, содержащего те же данные полезной нагрузки, что и зондирующий блок. В некоторых других аспектах модуль зондирования выполнен с возможностью подачи запроса в приемный узел для отбрасывания зондирующего блока после передачи сообщения подтверждения декодирования.
Другой аспект относится к узлу приема в радиосети. Узел содержит модуль декодирования, выполненный с возможностью декодирования первого и второго транспортных блоков для извлечения данных полезной нагрузки с использованием набора свойств транспортной передачи. Модуль зондирования выполнен с возможностью декодирования зондирующего блока с использованием набора свойств зондирующей передачи, причем упомянутый набор свойств зондирующей передачи имеет пониженную надежность по сравнению с набором свойств транспортной передачи. Модуль зондирования дополнительно выполнен с возможностью отбрасывания зондирующего блока после декодирования и предоставления подтверждения, указывающего на результат декодирования. Приемный узел также содержит модуль связи, выполненный с возможностью приема первого и второго транспортных блоков и зондирующего блока, расположенного между транспортными блоками из передающего узла, и передачи подтверждения в упомянутый передающий узел. Таким образом, приемный узел оценивает только то, успешно или нет декодирован зондирующий блок, однако будет отбрасывать зондирующий блок после попытки декодирования. Следовательно, процесс декодирования может выполняться на более низких уровнях, что приведет к уменьшению потребления ресурсов для зондирования.
В одном аспекте приемный узел выполнен с возможностью приема и декодирования зондирующего блока, связанного с идентификатором, который отличается от идентификатора, связанного с транспортными блоками. Прием зондирующего блока с другим идентификатором позволяет приемному узлу по существу непрерывно принимать транспортные блоки для обработки.
Во всех аспектах набор свойств передачи может содержать один или более параметров качества передачи или других настроек, влияющих на надежность передачи. Эти аспекты включают в себя, например, схему модуляции и кодирования, технологию радиодоступа, один или более режимов передачи "многоканальный вход - многоканальный выход", формирование луча, матрицу прекодирования или мощность передачи.
Краткое описание чертежей
Вышеизложенное будет очевидным из следующего более подробного описания примерных вариантов осуществления, которые проиллюстрированы на прилагаемых чертежах, на которых одинаковые ссылочные позиции относятся к одним и тем же частям на различных видах. Чертежи необязательно выполнены в масштабе, при этом акцент вместо этого делается на иллюстрации примерных вариантов осуществления.
На фиг. 1 показана блок-схема последовательности операций нескольких этапов способа, выполняемых в радиосети;
на фиг. 2 показана другая блок-схема последовательности операций, иллюстрирующая несколько этапов способа, выполняемых в радиосети;
на фиг. 3A показана временная диаграмма, показывающая несколько подкадров и транспортные блоки с использованием HARQ-процесса;
на фиг. 3B показана другая временная диаграмма, показывающая несколько подкадров и транспортные блоки с использованием HARQ-процесса;
на фиг. 4 показана блок-схема последовательности операций, иллюстрирующая этапы способа, выполняемые в радиосети;
на фиг. 5 показана другая временная диаграмма, показывающая несколько подкадров и транспортные блоки с использованием HARQ-процесса;
на фиг. 6 показана блок-схема последовательности операций, иллюстрирующая этапы способа, выполняемые в радиосети;
на фиг. 7 показана блок-схема последовательности операций, иллюстрирующая этапы способа, выполняемые в радиосети;
на фиг. 8 показана другая временная диаграмма, показывающая несколько подкадров и транспортные блоки с использованием HARQ-процесса;
на фиг. 9 показана блок-схема последовательности операций, иллюстрирующая этапы способа, выполняемые в радиосети;
на фиг. 10 показана блок-схема последовательности операций, иллюстрирующая этапы способа, выполняемые в радиосети;
на фиг. 11 показана блок-схема последовательности операций, иллюстрирующая этапы способа, выполняемые в радиосети;
на фиг. 12 показана примерная конфигурация узла передающего узла;
на фиг. 13 показана примерная конфигурация узла приемного узла;
на фиг. 14 показан узел радиосети и беспроводное устройство; и
на фиг. 15 показан схематичный чертеж нисходящей линии связи физического уровня LTE и обработки, выполняемой в восходящей линии связи;
Перечень сокращений
Приведенные ниже сокращения представляют собой неограничивающий перечень сокращений, обычно используемых в настоящем раскрытии. Раскрытие может содержать дополнительное сокращение, значение и определение, которое описано в настоящем раскрытии в соответствующем месте.
ACK - положительное подтверждение
ARQ - автоматический запрос повторной передачи
BLER - частота появления ошибочных блоков
CQI - индикатор качества канала
C-RNTI - временный идентификатор сотовой радиосети
CRS - характерные для соты опорные сигналы
CSI - информация о состоянии канала
DCI - управляющая информация нисходящей линии связи
DL - нисходящая линия связи
eICIC - усовершенствованная ICIC
FFT - быстрое преобразование Фурье
HARQ - гибридный автоматический запрос повторной передачи
ICIC - координация межсотовой интерференции
LTE - долгосрочное развитие
MAC - уровень доступа к среде
MCS - схема модуляции и кодирования
NACK - отрицательное подтверждение
OFDM - модуляция с ортогональным частотным разделением каналов
PCFICH - физический канал индикатора формата управления
PDCCH - физический канал управления нисходящей линии связи
PDSCH - физический совместно используемый канал нисходящей линии связи
PHICH - физический канал индикатора HARQ
PHY - физический уровень
PUCCH - физический канал управления восходящей линии связи
PUSCH - физический совместно используемый канал восходящей линии связи
PDU - блок данных протокола
QoS - качество обслуживания
RLC - управление линией радиосвязи
SG - грант планирования
SR - запрос планирования
SRS - зондирующие опорные сигналы
TTI - временной интервал передачи
UCI - управляющая информация восходящей линии связи
UE - пользовательское оборудование
UL - восходящая линия связи
Осуществление изобретения
Аспекты настоящего раскрытия будут более подробно описаны ниже со ссылкой на прилагаемые чертежи. Однако описанное здесь аппаратное устройство и способ могут быть реализованы во многих различных формах и не должны истолковываться как ограниченные аспектами, изложенными в настоящем документе. На всем протяжении описания одинаковые ссылочные позиции на чертежах относятся к одинаковым элементам.
Используемая здесь терминология предназначена только для описания конкретных аспектов раскрытия и не предназначена для ограничения раскрытия. Используемые здесь формы единственного числа также должны включать в себя формы множественного числа, если только контекст документа явно не указывает на обратное.
С целью иллюстрации следующих вариантов осуществления раскрытие относится к современному телекоммуникационному стандарту 3GPP/LTE, который описан и включен в стандарты 3GPP, серия 36, версия 12, март 2015 года. Таким образом, используемые здесь термины взяты из упомянутого стандарта. Однако предложенные и раскрытые технологии, способы и устройства не сводятся к ограничению или не ограничивают этот стандарт, но в целом применимы ко всем стандартам радиосети или беспроводной связи (например, Wi-Fi, WCDMA, WiMax, UMB и GSM), а также к стандартам проводной связи, в которых применяются аналогичные принципы коррекции ошибок и изменений параметров передачи для достижения надежной передачи данных и управления радиоресурсами. Будущие стандарты радиосети, которые в настоящее время находятся на ранней стадии разработки, могут извлечь выгоду из раскрытых вариантов осуществления и принципов, как и будущие изменения существующих стандартов и их вариантов. Термины "передающие и приемные узлы" будут использоваться на всем протяжении данного описания. Следует отметить, что эти термины не должны ограничиваться толкованием, соответствующим конкретному объекту. Скорее всего, базовая станция, но также и пользовательское оборудование, могут действовать в качестве или осуществлять функции передающего узла. Аналогичным образом, пользовательское оборудование и/или базовая станция могут действовать в качестве или осуществлять функции приемного узла.
Следует также отметить, что различные фигуры могут содержать некоторые операции, которые показаны рамкой со сплошной линией, и некоторые операции, которые показаны пунктирной линией. Операции, которые ограничены рамкой со сплошной линией, представляют собой операции, которые представлены в более широком примерном варианте осуществления. Следующие операции, которые ограничены рамкой с пунктирной линией, представляют собой примерные варианты осуществления, могут содержаться в, или быть частью или представлять собой дополнительные операции, которые могут быть предприняты в дополнение к операции примерных вариантов осуществления, ограниченных рамкой со сплошной линией. Следует иметь в виду, что операции необязательно должны выполняться в раскрытом порядке, если в настоящем раскрытии не указано иное. Кроме того, следует понимать, что не все операции необходимо выполнять. Примерные операции могут выполняться в любом подходящем порядке и в любом сочетании вариантов осуществления, проиллюстрированных на фигурах.
Термины "транспортные блоки" и "зондирующие блоки" используются на всем протяжении настоящего раскрытия. Следует иметь в виду, что любой блок (транспортный или зондирующий), указанный в данном документе, будет передаваться в течение периода времени заданной длины с использованием конкретной схемы модуляции и кодирования (MCS) и/или других соответствующих свойств передачи. Период времени будет упоминаться как временной интервал или подкадр. Подкадры могут быть объединены в кадры там, где это необходимо. Подкадры, как правило, имеют одинаковую длину. Транспортные и/или зондирующие блоки, переданные или принятые в течение упомянутых временных интервалов, обычно содержат информацию о заголовке, в том числе один или более идентификаторов, а также информацию о полезной нагрузке. Полезная нагрузка и заголовок кодируются в ответ на выбранную схему модуляции и кодирования для формирования соответствующих блоков. В случаях, когда величина полезной нагрузки ниже, чем величина, которая помещается в блоке (MCS и длина подкадра определяют количество передаваемой информации), добавляется незначащая информация.
Современные радиосети, в частности, беспроводные радиосети, требуют использования нескольких технологий обнаружения коррекции ошибок для обеспечения высокой и надежной пропускной способности канала передачи данных предпочтительно на физическом уровне или рядом с ним, чтобы избежать и уменьшить задержку при передаче данных. В стандарте радиосети LTE такая коррекция ошибок содержит технологии гибридного автоматического запроса повторной передачи (HARQ) на уровне PHY и MAC, то есть на уровне 1 и 2 модели уровня абстракции для радиосетей.
LTE использует специфические технологии HARQ с мягким объединением, называемые возрастающей избыточностью. Возрастающая избыточность позволяет узлу предпринимать попытки отправки/приема и декодирования первой версии избыточности транспортного блока, и в случае, если они терпят неудачу, он отправляет/принимает вторую версию избыточности транспортного блока, которая объединяется с первой версией при так называемом мягком объединении, и пытается декодировать. Передачи (повторные передачи) одного и того же транспортного блока происходят с минимальным интервалом 8 мс, если не используются такие функции, как группирование интервалов времени передачи (TTI), с помощью которых несколько версий избыточности передаются в следующих подкадрах без ожидания сигнала обратной связи относительно того, успешно ли была декодирована предыдущая версия избыточности.
Приемный узел, беспроводное устройство или базовая станция обеспечивает передачу сигнала обратной связи в передающий узел относительно того, успешно (ACK) или неуспешно (NACK) они декодировали транспортный блок. Затем передающий узел может принять решение относительно того, передать ли другую версию избыточности для одного и того же блока, или отправить ли версию избыточности для следующего транспортного блока.
Свойства передачи, используемые передающим узлом для передачи транспортных блоков в приемный узел, согласуются или рекомендуются перед началом передачи. С этой целью приемный узел отправляет отчет об индикаторе качества канала (CQI), который используется передающим узлом для установки свойств передачи. Среди прочего, такие свойств передачи могут содержать схему модуляции и кодирования (MCS). На основании отчетности передающий узел, чаще всего базовая станция или eNodeB, может принять приблизительное решение относительно того, какую именно MCS использовать для связи с приемным узлом. Кроме того, CQI включает в себя информацию, позволяющую базовой станции устанавливать BLER (то есть отношение между успешно принятыми и декодированными блоками и общим количеством принятых блоков), после чего она может также настроить свойства передачи на подходящее значение.
Выбор MCS сетевым узлом (например, eNodeB) для DL-передач и UL-передач во многом основан на CQI и ACK/NACK, отчет о которых отправляет UE. Каждое UE может иметь индивидуальное смещение в отчетности CQI, которое должен устранять сетевой узел. Сетевой узел регулирует предполагаемое смещение MCS, характерное для UE, до тех пор, пока не будет достигнуто конкретное целевое значение BLER, например, 10%.
Как было изложено ранее, блочные ошибки на уровне MAC следует по мере возможности избегать в случаях надежной связи с низкой задержкой. Так как существующая реализация HARQ поддерживает только двоичную отчетность относительно того, правильно ли был декодирован транспортный блок, операция определения и компенсации уникального смещения CQI не может быть выполнена без увеличения риска внесения блочных ошибок на уровне HARQ MAC. Следовательно, сетевой узел будет настраивать DL и UL-передачи, используя гораздо более надежную MCS, чем требуется, а не рисковать внесением задержки и/или блочных ошибок на уровне RLC.
В документе WO 2011/112127, представленном в качестве ссылки на предшествующий уровень техники, показан способ проверки ряда настроек MCS или свойств передачи и регулировки оценок качества канала в зависимости от того, были ли успешно приняты зондирующие пакеты. Хотя в этом способе не нужно ждать отчетов ACK/NACK по каждому отдельному зондирующему пакету перед отправкой следующего зондирующего пакета, передача данных прерывается во время сеанса зондирования, так как несколько зондирующих пакетов отправляются последовательно.
Предлагаемое решение предлагает способ регулировки свойств передачи и надежности передачи без нарушения требований к надежности и максимальной задержке. В частности, передача данных может продолжаться и не прерываться, как в ссылке на предшествующий уровень техники. В результате, мощность, которая в противном случае была бы выделена для запаса по надежности, станет доступной для других UE, и повысится пропускная способность системы. Настройку и поиск из менее консервативных свойств передачи можно достичь, не внося искусственные ошибки в передачу данных. Кроме того, может быть полезным, чтобы передатчик знал, насколько близко к своему пределу, с точки зрения мощности на физическом уровне, работает приемник. Например, может быть полезным знать, сколько итераций турбодекодера остается при успешном декодировании блока, или аналогичные показатели.
Упрощенный схематичный чертеж физического уровня LTE в UE предоставлен на фиг. 15. Шаблоны принимаются из радиосети и подвергаются БПФ в OFDM-демодуляторе. Выходной сигнал содержит ресурсные элементы, несущие например, символы модуляции и опорные сигналы. Опорные сигналы используются блоком оценки канала для оценки радиоканала, и блок вычисления весовых коэффициентов для объединения получает оптимальные весовые коэффициенты для объединения из оценок канала, информации о режиме передачи и выделенной полосе пропускания. Некоторые опорные сигналы также используются блоком оценки CSI для вычисления информации о состоянии канала (CSI, в том числе CQI), которая передается по каналу обратной связи в сетевой узел. Принятые символы модуляции и весовые коэффициенты для объединения подаются в модуль объединения и распаковки для получения мягких бит, которые затем вводятся в любой из декодеров в зависимости от канала.
UE сначала принимает и декодирует физический канал управления нисходящей линии связи (PDCCH) для того, чтобы найти управляющую информацию нисходящей линии связи (DCI), обеспечивающую информацию о выделении ресурсов для физического совместно используемого канала нисходящей линии связи (PDSCH), а также используемые режим передачи и схему модуляции и кодирования (MCS), выделение ресурсов для восходящей линии связи (грант планирования (SG)), команды управления мощностью восходящей линии связи и т.д. Однако перед ее приемом UE декодирует физический канал индикатора формата управления (PCFICH), который показывает, насколько большой является область управления, то есть, сколько начальных OFDM-символов в подкадре несет PDCCH. Кроме того, перед декодированием необходимо оценить канал распространения радиоволн и получить весовые коэффициенты для объединения.
PDCCH подвергается сверточному кодированию и декодированию с помощью декодера управления. Декодированная DCI подается в блок управления, который используется для конфигурирования основной полосы частот. Декодер управления дополнительно выводит сигнал обратной связи из сетевого узла относительно того, успешно или нет были декодированы передачи по восходящей линии связи или (UL ACK/NACK; UL A/N), и также используется для декодирования блока служебной информации (MIB), переносимого по физическому широковещательному каналу (PBCH).
После декодирования DCI, как правило, в момент времени приблизительно посередине подкадра, PDSCH становится следующим. Оставшиеся опорные сигналы в подкадре используются для улучшения оценок канала, весовые коэффициенты для объединения адаптируются для используемого режима передачи, и затем принятые символы модуляции объединяются и распаковываются, в результате чего мягкие биты подвергаются декодированию. Так как весь подкадр должен быть принят до того, как может начаться декодирование, по времени это происходит в следующем подкадре конвейерным образом, когда принимается и декодируется управляющая информация.
PDSCH подвергается турбокодированию, и он декодируется с использованием декодера данных, который в основном содержит функциональные возможности HARQ со связанным с ними объединителем мягких бит, и турбодекодера. Турбодекодер многократно повторяет декодирование до тех пор, пока принятые данные не будут успешно декодированы (как показано с помощью успешной циклической проверки избыточности (CRC)) или не истечет время (не закончатся итерации). В случае неудачного декодирования, декодирование может завершиться раньше, если показатели указывают на то, что в следующих итерациях исправлено не так много информации, так называемая функция раннего завершения (EGF). В связи с конвейерным способом обработки турбодекодер должен завершить выполнение операции в течение одного подкадра. Сигнал обратной связи относительно того, были ли успешно или неуспешно (ACK/NACK; A/N DL) декодированы данные, подается в сетевой узел в подкадре n+4, где подкадр n является подкадром, где были приняты данные.
CSI-отчетность может быть периодической, при этом UE узнает заранее, когда оно должно отправить отчет, но может быть также периодической, при этом UE получает информацию в виде DCI о том, что отчет о CSI должен быть отправлен в подкадре n+4.
Время обработки для OFDM-демодулятора, блока оценки канала, блока вычисления весовых коэффициентов для объединения, модуля объединения и распаковки и декодера управления сильно зависит от используемой полосы пропускания, тогда как время обработки для декодера данных в основном зависит от категории UE, которая определяет размер буферов HARQ.
Когда UE принял SG в подкадре n, он должен передаваться по физическому совместно используемому каналу восходящей линии связи (PUSCH) в подкадре n+4. Запросы планирования (SR), A/N DL и CSI составляют управляющую информацию восходящей линии связи (UCI), которая кодируется кодером UCI. Данные, подлежащие передаче, кодируются кодером данных, который выполняет турбокодирование, и затем вставляется UCI. Символы модуляции подаются в блочный модуль упаковки, который отображает символы модуляции и опорные символы восходящей линии связи, выработанные генератором RSIG UL, в предоставленное выделение. Полученные в результате последовательности символов подаются в модулятор SC-FDMA, который по существу выполняет ОБПФ, и выходной сигнал отправляется в радиосеть.
В случае, если грант планирования не принят, но UE должно предоставить A/N UL, CSI и SR, информация передается по физическому каналу управления восходящей линии связи (PUCCH) согласно заданному формату.
Время обработки для генератора RSIG UL, блочного модуля упаковки и модулятора SC-FDMA сильно зависит от используемой полосы пропускания, тогда как время обработки для кодера данных зависит от категории UE.
Кроме того, с учетом продвижения синхронизации (TA) и стандарта, предусматривающего, что будет поддерживаться радиус соты вплоть до 100 км, подкадр n восходящей линии связи должен передаваться 0,67 мс до приема подкадра n нисходящей линии связи. Следовательно, UE должно иметь возможность выполнять всю обработку подкадра, связанную с данными и CSI, в течение приблизительно 2 мс, чтобы соответствовать периодам времени A/N DL, действующим по запросам на апериодическую передачу отчетов по CSI, действующим по A/N UL из сетевого узла и т. д.
Следует отметить, что из-за стоимости и энергоэффективности UE разрабатывается обычно с учетом только вычислительной мощности, объема памяти и т.д., которые необходимы для поддерживаемых функций и возможностей, например, для количества несущих DL и UL, соответственно, и поддерживаемой полосы пропускания для каждой из них. Например, это отражается в том факте, что БПФ и ОБПФ разрабатываются таким образом, чтобы соблюдались сроки, определенные на основе OFDM-символов, но не намного быстрее.
Фиг. 14 иллюстрирует систему связи, содержащую eNodeB 20 и UE 10. В этом примере, eNodeB 20 передает транспортный блок в UE 10, в результате чего UE подтверждает успешный прием после успешного декодирования. В соответствии с предложенными решениями eNodeB 20 передает один или более зондирующих блоков в течение следующего временного интервала (следующих нескольких временных интервалов), и UE подтверждает получение и успешное декодирование таких зондирующих блоков. Таким образом, eNodeB 20 принимает информацию о физическом уровне PHY и может реконфигурировать свойства передачи для транспортных блоков, запланированных для дальнейшей передачи. Таким же образом UE 10 может передать в течение заданного временного интервала один или более зондирующих пакетов, используя конкретные свойства передачи, которые декодируются после приема в eNodeB. Следовательно, eNodeB позволяет настроить свойства передачи для UL и DL на менее надежный уровень, но при этом соблюдая требования по надежности и задержке.
Пример работы узла и способа в соответствии с одним или более аспектами проиллюстрирован на фиг. 1. Способ выполняется в передающем узле радиосети для регулировки свойств передачи, связанных с передачей данных в подкадрах. В примере подкадры имеют длительность 8 мс. Передающий узел может содержать eNodeB или UE, так как способ охватывает оба направления DL и UL. Например, и со ссылкой на фиг. 14, передающий узел реализован в виде eNodeB 20. ENodeB 20 поддерживает связь через линию связи, передающую управляющую информацию и данные по нисходящей линии связи в UE 10. UE 10 также содержит передающий узел, способный использовать предложенный способ во время передачи данных по восходящей линии связи. На этапе S101 первый транспортный блок передается с использованием свойств транспортной передачи из передающего узла в приемный узел. Такие свойства передачи часто включают в себя MCS, но могут также содержать технологию радиодоступа, один или более режимов передачи "многоканальный вход - многоканальный выход", формирование луча, матрицу прекодирования, мощность передачи, параметры предискажения и т.п. При необходимости второй транспортный блок передается с использованием набора свойств транспортной передачи на этапе S103.
Далее, после передачи первого транспортного блока в способе предусмотрена дополнительная передача выделенного зондирующего блока в качестве этапа 102. Упомянутый зондирующий блок использует набор свойств зондирующей передачи, которые содержат пониженную надежность по отношению к набору свойств транспортной передачи. Другими словами, набор свойств зондирующей передачи более динамичный, чем набор свойств транспортной передачи. Например, набор свойств зондирующей передачи может содержать схему модуляции и кодирования, которая является более динамичной и, следовательно, менее надежной, чем схема модуляции и кодирования, используемая в свойствах транспортной передачи. Более конкретно, зондирование можно выполнить путем временного увеличения отображения CQI в MCS и передачи соответствующего зондирующего блока с использованием усовершенствованной MCS.
На этапе 104 набор свойств транспортной передачи реконфигурируется для дальнейшей передачи данных с использованием или на основании информации, переданной приемным узлом и указывающей на успешное декодирование зондирующего блока приемным узлом. В связи с этим следует отметить, что успешное декодирование относится не только к приему блока и символов IQ в соответствии с выбранным типом модуляции, но также к исправлению ошибок с упреждением и т.п., чтобы обеспечить окончательный статус для уровня линии связи в цепи приемника. В зависимости от статуса приемный узел передает сообщение ACK/NACK в передающий узел.
Реконфигурация может содержать регулировку по меньшей мере части свойств транспортной передачи для согласования соответствующей части из набора свойств зондирующей передачи. Например, MCS свойств транспортной передачи регулируется для согласования MCS, используемой в свойствах зондирующей передачи. В качестве альтернативы, часть из набора свойств транспортной передачи регулируется таким образом, чтобы результирующая надежность передачи была ниже, чем надежность передачи набора свойств передачи, используемых на этапе S101, но выше, чем надежность передачи набора свойств зондирующей передачи. Например, и со ссылкой на таблицу 2, свойства транспортной передачи содержат MCS, соответствующий индексу 10, и во время зондирования использовался индекс 12. В связи с этим следует отметить, что надежность передачи уменьшается с повышением индексов, представленных в таблице 2. После приема подтверждения успешного декодирования новые свойства транспортной передачи, отрегулированные на этапе S104, содержат MCS, соответствующую значению 11 индекса, представленного в таблице 2. Затем новый индекс 11 используется для дальнейшей передачи данных, так как он по-прежнему удовлетворяет требованию, предъявляемому к задержке и качеству.
В некоторых вариантах осуществления может быть целесообразным подготовить зондирующий блок с выделенными данными полезной нагрузки, как показано дополнительным блоком 102a. Такие данные полезной нагрузки также включены в транспортный блок, использующий набор свойств транспортной передачи, и передаются, например, на этапе S101. Затем, при необходимости, один или более дополнительных транспортных блоков передаются в приемный узел на этапе 102b. После отправки одного или более дополнительных транспортных блоков, передающий узел оценивает на дополнительном этапе 102c, было ли принято сообщение ACK/NACK, относящееся к приему зондирующего блока. Как указано ранее в LTE, использующем HARQ-процесс, такое сообщение подтверждения должно приниматься в подкадре n+4, где n - временной интервал или подкадр, в котором был передан зондирующий блок. Если сообщение подтверждения еще не принято, повторяется этап 102b, в противном случае, после положительного подтверждения декодирования 1-го транспортного блока, зондирующий блок, который использует полезную нагрузку, созданную на этапе 102a, передается в приемный узел. Сетевой узел будет использовать доступный HARQ-процесс для передачи зондирующего блока. HARQ-процессы должны быть доступными с 1-го набора свойств передачи, то есть MCS устанавливается таким способом, чтобы не нужны были повторные передачи HARQ, кроме случая, когда выполняется зондирование.
Так как полезная нагрузка в зондирующем блоке была уже успешно принята и декодирована приемным узлом, зондирующий блок содержит только избыточные данные, и он не нужен приемному узлу. Копии декодированных транспортных блоков будут удалены с помощью UE, MAC или RLC, поэтому повторная передача уже декодированного блока не является проблемой для UE. Дополнительно или альтернативно, передача зондирующего блока может также в необязательном порядке содержать этап S102f, на котором также передается инструкция для отбрасывания зондирующего блока после декодирования в приемный узел.
На фиг. 2 показаны некоторые другие дополнительные аспекты предложенного способа. На этапе S103a передающий узел обеспечивает подачу плана данных полезной нагрузки в транспортные блоки, которые будут передаваться в соответствующие временные интервалы. Кроме того, на этапе S103b запланирована передача зондирующего блока в выделенном одном из этих временных интервалов. Этот выделенный временной интервал для зондирующего блока может быть фактически равен одному временному интервалу, в котором запланирован транспортный блок для передачи. Другими словами, планирование транспортных блоков и зондирующего блока приводит к получению зондирующего блока и транспортного блока, запланированного для передачи в течение того же самого временного интервала и по существу при наличии конфликта планирования.
Чтобы разрешить этот конфликт, данные полезной нагрузки, запланированные для временного интервала, в течение которого не передавался зондирующий блок, объединяются с данными полезной нагрузки, запланированными для передачи в следующем временном интервале. Таким образом, это объединение, дополнительно показанное на этапе S103c, приводит к получению транспортного блока, содержащего пару данных полезной нагрузки. Объединение данных полезной нагрузки можно выполнить в любой момент времени, например, перед передачей 1-ого транспортного блока. После объединения данных полезной нагрузки, на этапе S103d из них вырабатывается транспортный блок и передается в качестве 2-ого транспортного блока, используя набор свойств транспортной передачи. В связи с этим большее количество ресурсов выделяется для передачи 2-го транспортного блока, но другие свойства транспортной передачи, в частности, MCS, будут такими же, как и для передачи 1-го транспортного блока.
Процесс приводит к появлению небольшого джиттера и задержки одного временного интервала, но в остальном передача транспортных блоков будет оставаться непрерывной. Способ продолжается на этапе 104. В качестве вспомогательной части такой реконфигурации, части из набора свойств транспортной передачи регулируются таким образом, чтобы согласовать соответствующие части из набора свойств зондирующей передачи. В качестве примера, MCS транспортного блока реконфигурируется для согласования MCS зондирующего блока на этапе S104a, если информация из приемного узла подтверждает положительный прием зондирующего(их) блока(ов) с использованием упомянутой MCS. Передающий узел может затем предположить, что измененная MCS будет все еще обеспечивает надежность, которая требуется для приемного узла.
На фиг. 3А и 3В показана временная диаграмма для передачи блоков для eNodeB в узел UE с использованием HARQ-процессов. Каждый транспортный блок SFrT с полезной нагрузкой TRB 0 - TRB 10 запланирован в соответствующем подкадре на фиг. 3A. Соответствующий транспортный блок назначается одному из 8 HARQ-процессов для передачи, например, транспортный блок SFrT с полезной нагрузкой TRB 0 назначается HARQ-процессу 0, с полезной нагрузкой TRB 1 назначается HARQ-процессу 1 и т.д. Полезная нагрузка, запланированная для передачи в подкадрах в буфере Tx DL, таким образом разделяется на различные HARQ-процессы, показанные на фиг. 3A, и передается с использованием набора свойств транспортной передачи. На фиг. 3B показан пример, в котором зондирующий блок SFpT вставляется с использованием HARQ-процесса 0. Зондирующий блок SFpT содержит такую же полезную нагрузку TrB 0, как и обычный запланированный транспортный блок SFrT1. Успешное декодирование этого транспортного блока было подтверждено приемным узлом (не показан на фиг. 3B). То же самое касается транспортного блока с полезной нагрузкой TrB 1 в HARQ-процесс 1.
HARQ-процесс 0 освобождается, и поэтому его можно использовать для передачи зондирующего блока SFpT с использованием набора свойств зондирующей передачи в 8-м подкадре. Полезная нагрузка TrB0 в зондирующем блоке SFpT становится известной приемному узлу и будет отброшена после декодирования зондирующего блока (не показан). Канал обратной связи (не показан) от приемного узла до передающего узла обеспечивает подачу информации относительно того, подходит ли набор свойств зондирующей передачи для дальнейшего использования. Кроме того, HARQ-процесс 0 освобождается снова и снова повторно используется для передачи нормальных транспортных блоков.
Однако следует отметить, что при сравнении с фиг. 3A транспортный блок SFrT2 с полезной нагрузкой TrB8 был изначально запланирован для передачи в упомянутом подкадре, при этом упомянутый подкадр теперь используется для передачи зондирующего блока SFpT. Следовательно, полезная нагрузка TrB8 должна планироваться повторно и передаваться в следующем подкадре. Это можно достичь путем объединения полезной нагрузки TrB8 и полезной нагрузки TrB9, запланированной для передачи в следующем временном интервале, в новый транспортный блок SFbT. HARQ-процесс 1 используется для передачи этого транспортного блока с объединенной полезной нагрузкой. Передача вызовет джиттер в потоке данных с помощью одного подкадра в приемном узле, но поток данных в среднем поддерживается постоянным, и в передачу не вносится значительная задержка.
В этом примере транспортный блок, непосредственно следующий за зондирующим блоком, используется для передачи объединенной полезной нагрузки. Однако некоторые другие транспортные блоки могут быть подходящими также до тех пор, пока будет обеспечиваться прием и успешное декодирование полезной нагрузки, пропущенной из-за передачи зондирующего блока, в течение времени, требуемого UE. Кроме того, можно передать объединенную полезную нагрузку до передачи зондирующего блока.
На фиг. 4 показан еще один пример способа регулировки схемы модуляции и кодирования (MCS). На этапе S401 принимается положительное подтверждение (ACK) для успешного декодирования полезной нагрузки TrBm. Так как зондирование выполняется периодически, на этапе S402 производится оценка того, выполняется ли зондирование в течение заданного периода времени или в пределах количества подкадров. Если это так, процесс прекращается и повторяется позже. В противном случае способ продолжается на этапе S403, на котором осуществляется планирование HARQ-процесса в выделенном подкадре n для передачи зондирующего блока. Зондирующий блок вырабатывается (S404), используя полезную нагрузку TrB m, для которой положительное подтверждение ACK было принято на этапе S401, и затем зондирующий блок передается в подкадре n, используя соответствующий назначенный HARQ-процесс на этапе S405.
Кроме того, на этапе S406 оценивается, предназначен ли используемый подкадр n для регулярной передачи транспортного блока, если транспортный блок был запланирован/планируется для передачи в упомянутом подкадре n. Если это не так, способ ожидает сигнал ACK/NACK по каналу обратной связи из приемного узла на этапе S409. Однако, если транспортный блок был запланирован для регулярной передачи, способ продолжается на этапе S407, объединяя данные полезной нагрузки в первоначальном плане DL, который будет передаваться в транспортных блоках в подкадрах n и n+1. Затем объединенная полезная нагрузка передается на этапе S408 в подкадре n+1 в виде нормального транспортного блока, и способ продолжается на этапе S409. В ответ на прием сигнала обратной связи обновляется статистика BLER для зондирующего блока, и при необходимости реконфигурируется MCS. Последний этап S410, в частности, обновление статистики BLER перед реконфигурированием MCS, является необязательным, но может быть подходящим. Передающий узел обычно должен гарантировать, чтобы менее стабильные свойства передачи не привели к более высокому BLER или любому другому риску, влияющему на требования к задержке приемного узла. Следовательно, зондирующий блок с набором свойств зондирующей передачи передается два раза перед тем, как произойдет реконфигурация набора свойств транспортной передачи.
На фиг. 5 показан пример передачи зондирующего пакета в обстановке, в которой приемный узел не требует приема данных более одного раза в k>1 подкадрах, хотя он может по-прежнему иметь строгие требования к задержке и надежности. В проиллюстрированном примере буфер Tx DL содержит данные полезной нагрузки TrB 0, … TrB 5, запланированные для передачи каждого второго подкадра (показанные сплошными и пунктирными линиями, пустые квадраты на линии буфера Tx DL). Следовательно, только каждый второй HARQ-процесс используется для передачи, оставляя другие HARQ-процессы неиспользуемыми. Эти неиспользуемые HARQ-процессы можно использовать для зондирования, не вызывая какого-либо джиттера при передаче. Например, зондирующий блок SFp1T запланирован для передачи с использованием ранее неиспользованного HARQ-процесса 1 во время неиспользуемого в остальных случаях подкадра. Кроме того, блок SFp1T содержит выдержанную опорную полезную зондирующую нагрузку, известную приемному узлу. Передача использует набор свойств зондирующей передачи, например, отображение CQI в MCS, MCS с меньшей надежностью, с меньшей избыточностью, с другими уровнями мощности и т.п. Можно использовать все неиспользуемые HARQ-процессы для процесса зондирования, поэтому соответствующие статистические данные об успешном декодировании зондирующих блоков можно быстро найти в паре кадров. Это подходит при предположении, что условия эксплуатации (например, шум, отражение, затухание) не изменяются так быстро, чтобы влиять на статистику зондирования.
В предыдущих примерах использовался буфер Tx DL для передачи зондирующих блоков. Для передачи транспортных блоков и/или зондирующих блоков соответствующий блок, который содержит их, связан с идентификатором, позволяющим приемному узлу извлекать и декодировать правильный транспортный блок. Этот уникальный идентификатор, называемый C-RNTI, предоставляется eNodeB и по отдельности назначается каждому UE в сети. В случае, если крайне важно иметь приемный узел или UE для приема данных в каждом подкадре, а джиттер был бы неприемлемым, UE может поддерживать декодирование двух C-RNTI одновременно, где один их них используется для регулярной полезной нагрузки, а другой для выделенной полезной нагрузки зондирования.
На фиг. 6 показан пример соответствующего способа, в котором используются больше идентификаторов, связанных с одним и тем же приемным узлом. Два идентификатора, например, два различных C-RNTI назначаются UE, в результате чего один идентификатор используется для транспортного блока, и второй идентификатор используется для зондирующих блоков. На этапе S101 передается 1-й транспортный блок с данными полезной нагрузки. 1-й транспортный блок содержит 1-й идентификатор, связанный с приемным узлом. Приемный узел принимает транспортный блок и декодирует его в соответствии с идентификатором. На этапе S201e передается зондирующий блок. Упомянутый зондирующий блок содержит 2-й идентификатор, также связанный с приемным узлом. При необходимости на этапе 102g узел также передает 3-й транспортный блок, используя первый идентификатор и набор свойств транспортной передачи. В связи с этим следует отметить, что дополнительная передача 3-го транспортного блока и зондирующего блока может очень хорошо происходить одновременно, но также и последовательно друг за другом. В случае непрерывной передачи транспортных блоков может быть полезной одновременная передача зондирующего блока с использованием другого 2-го идентификатора, связанного с приемным узлом, для того, чтобы гарантировать непрерывную передачу транспортных блоков. Этапы 103 и 104 способа аналогичны тем, которые уже были описаны.
На фиг. 7 показан аналогичный вариант осуществления предложенного способа для использования 2-ого идентификатора, связанного с приемным узлом. В ходе оценки, выполняемой на этапе S701, проверяется, истекло ли заданное количество времени с момента последнего зондирования, и способ продолжается на этапе S702, если оценка выдает истинное значение. Зондирующий блок вырабатывается с различным C-RNTI, связанным с приемным узлом (который в данном случае называется сотой). Зондирующий блок и регулярный транспортный блок, причем последний имеет другой идентификатор, связанный с приемным узлом, передаются в течение одного и того же периода времени на этапе S703. Передающий узел ожидает сигнала обратной связи на этапе S704 и на этапе S705 обновляет статистику BLER для зондирующего блока соответственно. На основании сигнала обратной связи и статистики выполняется регулировка свойств передачи, например, можно выполнить регулировку MCS.
С целью передачи зондирующих блоков со 2-м идентификатором можно использовать выделенный HARQ-процесс зондирования. На фиг. 8 показана соответствующая временная диаграмма. В этом примере используются все регулярные HARQ-процессы или регулярная передача данных SFrT, и буфер Tx DL полностью заполняется данными полезной нагрузки TrB, которые запланированы для непрерывной передачи в следующих подкадрах. В выделенных подкадрах зондирующие блоки TrPD запланированы для отправки с использованием выделенного HARQ-процесса зондирования. Зондирующие блоки передаются одновременно с транспортными блоками SFrT, используя различные идентификаторы, которые отличаются от идентификаторов транспортных блоков. Передающий узел может также принимать сигнал обратной связи для зондирующих блоков SFpT, а также для блоков SFrT передачи (не показаны).
В дополнение к вышеизложенному, передающий узел может выполнить процесс оценки для реконфигурирования набора свойств транспортной передачи в ответ на сигнал обратной связи относительно передачи зондирующих блоков. На фиг. 9 показан в качестве примера вариант осуществления такого подхода, в котором реконфигурируется схема модуляции и кодирования для транспортных пакетов. Конечно, можно повторно отрегулировать другие параметры свойств передачи, используя, соответственно, иллюстрированный подход. После приема сигнала обратной связи HARQ на этапе S901 из приемного узла результат сигнала обратной связи оценивается на этапе S902. Если сигналом обратной связи является NACK, это означает, что соответствующий зондирующий блок был неудачно декодирован, выполнение способа продолжается на этапе S905. NACK, обеспеченный приемным узлом, показывает, что MCS (или, более обобщенно, свойство передачи) переданного зондирующего блока не является достаточно надежным, чтобы гарантировать безошибочную передачу (или, более обобщенно, выбранные свойства передачи для зондирующего блока могут не соответствовать требованиям к задержке и BLER). Следовательно, свойства передачи, например, MCS регулируется до более умеренного или нижнего уровня для следующих зондирующих блоков для того, чтобы повысить надежность и/или BLER. Кроме того, статистика BLER при зондировании сбрасывается на этапе S906 для того, чтобы отразить отрегулированные настройки.
С другой стороны, если оценка показывает успешную передачу (ACK в сигнале обратной связи), способ продолжается на этапе S903, чтобы оценить, имеет ли текущая статистика BLER для зондирующих блоков достаточно большую базу для обоснования регулировки свойств транспортной передачи. Если оценка является отрицательной, выполнение способа продолжается с текущими настройками, и они применяются для следующих передач зондирующих и транспортных блоков на этапе S909. В случае, если база статистических данных является достаточно большой, на этапе S904 оценивается, является ли BLER ниже определенного порогового значения. В связи с этим пороговое значение может зависеть от требования к низкой задержке, установленного или рекомендованного приемным узлом. Если критерии, описанные на этапе S904, выполнены, свойства передачи, например, значение MCS, регулируются также для передачи транспортных блоков на этапе S907. Следовательно, будущие транспортные блоки будут передаваться с использованием обновленных, но менее надежных настроек CQI-MCS, так как эти настройки по-прежнему удовлетворяют требованиям к BLER или задержке, как оценивается на этапе S904. Опять же, статистика BLER для зондирующего блока сбрасывается, и применяются новые настройки для будущей передачи транспортных блоков.
На фиг. 10 показан другой пример способа согласно настоящему раскрытию. В зависимости от сетевого стандарта передача данных или транспортных блоков может быть разрешена только в определенные временные интервалы. Например, UE в сети LTE разрешено передавать только в течение выделенных временных интервалов, заданных eNodeB. Кроме того, eNodeB управляет свойствами передачи, которые передаются в UE перед передачей. Тем не менее, eNodeB подходит для получения информации о качестве канала UL для экономии доступных ресурсов. В этом случае eNodeB предписывает UE передавать зондирующие пакеты с выделенной полезной нагрузкой в определенные временные интервалы. После приема и декодирования этих зондирующих пакетов eNodeB извлекает информацию и может, в ответ на это, предписать UE регулировать свои свойства передачи для будущих транспортных блоков. На этапе S106 UE принимает список временных интервалов для транспортных блоков, которые должны быть отправлены по UL. В соответствии с упомянутым списком первый транспортный блок передается с использованием набора свойств транспортной передачи. Затем UE принимает запрос на передачу зондирующего блока. Такой запрос может, как и в этом примере на этапе S107, приниматься отдельно, но также может быть уже включен в список временных интервалов на этапе S106. Запрос может не только содержать информацию о том, когда передать зондирующий блок, но также и свойства передачи для такой передачи зондирующего блока. В ответ на это UE передает зондирующий блок, используя набор свойств зондирующей передачи на этапе S102 и 2-й транспортный блок на этапе S103. Зондирующий блок, а также второй транспортный блок передаются с использованием одной или нескольких из раскрытых ранее технологий.
Другой аспект настоящего раскрытия относится к способу обработки информации о качестве транспортных блоков в приемном узле радиосети. На фиг. 11 показан соответствующий пример. При необходимости свойства передачи для транспортных блоков, подлежащих приему, передаются и принимаются на этапе S201. Затем 1-й транспортный блок, имеющий набор свойств транспортной передачи, принимается на этапе S202. Зондирующий блок принимается на этапе S203, причем упомянутый зондирующий блок имеет набор свойств зондирующей передачи. Следует отметить, что процесс декодирования транспортных блоков и/или зондирующего блока может занимать некоторое время, в течение которого принимаются дополнительные транспортные и/или зондирующие блоки. Для этого процесса приемный узел может также использовать HARQ или аналогичные процессы, в том числе турбодекодирование.
В примере, показанном на фиг. 11, зондирующий блок принимается на этапе S207 после передачи сигнала обратной связи, подтверждающего декодирование полезной нагрузки в принятом 1-м транспортном блоке. Этот подход позволяет принимать данные полезной нагрузки в зондирующем блоке, которые уже были успешно декодированы. 2-й и даже дополнительные транспортные блоки (не показаны) принимаются и декодируются на этапе S204. 2-е транспортные блоки содержат набор свойств транспортной передачи. Спустя некоторое время зондирующий блок полностью декодируется, или процесс декодирования заканчивается неудачно, и соответствующий сигнал обратной связи передается обратно в передающий узел на этапе S205. Зондирующий блок, а также любые результаты декодирования отбрасываются на этапе S206, так как зондирующий блок не используется непосредственно для передачи данных, а скорее всего для зондирования свойств передачи.
Следует отметить, что передача или прием 1-го и соответствующего 2-го транспортных блоков также включают в себя передачу и/или прием множества таких 1-х и 2-х транспортных блоков. В связи с этим предполагается, что транспортный блок использует HARQ-процесс, хотя он повторно не принимается, так как выбранные свойства транспортной передачи являются достаточно умеренными, поэтом повторная передача не требуется.
На фиг. 12 показан вариант осуществления передающего узла, реализованный, например, в базовой станции или в UE. Передающий узел содержит одну или более схем обработки, одновременно основополосные и ВЧ компоненты, а также блоки памяти и другие компоненты аппаратных средств. Функциональные возможности реализованы в виде программного обеспечения, аппаратных средств или их сочетания. Например, любые функциональные возможности можно реализовать с помощью компонентов аппаратных средств типа блоков памяти, блоков FFT, модуляторов, усилителей, блоков фильтрации и обработки, а также с помощью компонентов программного обеспечения, например, кодеров, или их сочетания. Передающий узел, показанный в данном примере, содержит несколько модулей, которые, в свою очередь, используются или осуществляются в виде аппаратных средств, программного обеспечения и их сочетания. Кроме того, передающий узел может образовывать неотъемлемую часть eNodeB или UE. По своей природе такие модули реализуются различными способами. Передающий узел 300 содержит, помимо прочего, схему 300a обработки, включающую в себя несколько модулей, взаимосвязанных и поддерживающих связь друг с другом. Модуль 301 данных выполнен с возможностью предоставления данных полезной нагрузки и размещения их в одном или более транспортных блоках для следующей передачи модулем 302 связи. Модуль 301 данных также содержит планировщик 301a и устройство 301b объединения полезной нагрузки. Планировщик выполнен с возможностью размещения транспортных блоков для дальнейшей передачи в заранее определенном порядке и назначения каждого блока конкретным подкадрам. Планировщик может также отвечать за подачу соответствующего транспортного блока в модуль 302 связи. Модуль 302 связи передает соответствующие блоки, предоставленные модулем 301 данных и модулем 303 зондирования, в приемный узел. Модуль 302 также принимает любой сигнал обратной связи или подтверждения из приемного узла относительно декодирования блоков и обрабатывает сигнал обратной связи.
Устройство 301b объединения полезной нагрузки выполнено с возможностью объединения данных полезной нагрузки, если данные полезной нагрузки были первоначально запланированы для дальнейшей передачи в следующем временном интервале, теперь необходимы для передачи в том же самом временном интервале. Модуль 303 зондирования, который представляет собой часть схемы 300a обработки, выполнен с возможностью выработки полезной нагрузки для зондирования и предоставления зондирующего блока для передачи. Модуль 304 свойств передачи выбирает соответствующий набор свойств передачи как для данных, так и для модуля зондирования, или, более конкретно, для транспортных блоков, подаваемых модулем данных, и зондирующих блоков, подаваемых модулем зондирования.
На фиг. 13 показан вариант осуществления приемного узла. Приемный узел можно реализовать в виде базовой станции, eNodeB радиосети, а также в виде мобильного устройства или UE. Аналогично передающему узлу, приемный узел содержит одну или более схем обработки, как однополосную, так и ВЧ часть, а также блоки памяти и другие компоненты аппаратных средств. Функциональные возможности приемного узла реализуются в виде программного обеспечения, аппаратных средств или их сочетания. Например, функциональные возможности связи могут содержать компоненты аппаратных средств типа блоков памяти, блоков FFT, модуляторов, усилителей, блоков фильтрации и обработки, а также и программных компонентов, таких как кодеры.
Приемный узел 400 содержит одну или более схем 400a обработки, реализующих различные модули для обеспечения работы в соответствии с предложенным принципом. Модуль 402 связи выполнен с возможностью приема транспортных и зондирующих блоков через линию связи радиосети из передающего узла и ретрансляции приемных блоков в соответствующие модули декодирования и зондирования. Он позволяет оценить любой идентификатор, включенный или связанный с принятыми транспортными и зондирующими блоками, для инициирования ретрансляции. В случае, когда используются различные идентификаторы для транспортного блока и зондирующего блока, модуль 402 связи может использовать эту информацию для ретрансляции соответствующих блоков в модуль транспортировки и модуль зондирования, соответственно.
Модуль 402 связи также выполнен с возможностью передачи сигнала обратной связи в передающий узел относительно результатов процесса декодирования, выполненного модулем 403 зондирования и модулем 401 декодирования. Модуль 401 декодирования выполнен с возможностью извлечения транспортного блока из модуля 402 связи и декодирования блока для получения данных полезной нагрузки, включенных в него. С этой целью модуль 401 декодирования использует информацию, которая относится к свойствам передачи, связанным с соответствующим транспортным блоком. Например, если транспортный блок использовал конкретную схему модуляции и кодирования для кодирования полезной нагрузки, модуль декодирования использует соответствующую схему для декодирования данных полезной нагрузки, которая содержится в транспортном блоке. Свойства передачи, необходимые для декодирования, могут передаваться параллельно в соответствующем транспортном блоке в некоторой форме управляющей информации или иным образом подаваться в модуль декодирования. Модуль 401 декодирования также выполнен с возможностью передачи сигнала обратной связи в модуль связи, который сообщает о результате процесса декодирования. Модуль 402 связи передает сигнал ACK/NACK по каналу обратной связи обратно в передающий узел, что может зависеть от результата запуска повторной передачи или передачи нового транспортного блока.
Модуль 403 зондирования выполнен с возможностью извлечения зондирующих блоков и декодирования упомянутых блоков. Зондирующие блоки содержат различные свойств передачи, например, различные MCS, по сравнению с транспортными блоками, принятыми узлом 400. Как и в случае транспортных блоков, любая информация, необходимая для декодирования полезной нагрузки зондирующих блоков, может быть включена непосредственно в зондирующие блоки или отправлена одновременно с управляющей информацией. Поэтому модуль 403 зондирования содержит подмодуль 403a декодирования, извлекающий зондирующий блок, имеющий набор свойств зондирующей передачи. Требования к декодированию, например, к конкретной MCS, связанной с набором свойств зондирующей передачи, используются для получения полезной нагрузки. Подмодуль 403a декодирования также оценивает результат процесса декодирования, то есть проверяет, был ли успешно декодирован зондирующий блок. Декодированная полезная нагрузка может содержать выделенные данные, особенно подходящие для зондирующих блоков или полезной нагрузки предыдущего или следующего принятого транспортного блока. В любом случае декодированные данные отбрасываются подмодулем 403b. В случае ошибок, возникающих во время процесса декодирования, подмодуль 403b может включать в себя функциональные возможности для анализа того, почему процесс декодирования завершился неудачно. Такая информация может быть передана обратно в передающий узел для регулировки передачи следующих зондирующих блоков. Модуль 403 зондирования также содержит подмодуль подтверждения, извлекающий результаты из подмодуля 403a декодирования и подмодуля 403b отбрасывания для подготовки соответствующего сообщения, передаваемого по каналу обратной связи. Упомянутое сообщение, передаваемое по каналу обратной связи, перенаправляется в модуль 402 связи для обратной передачи в передающий узел.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧНОЕ СМЕЩЕНИЕ MCS ДЛЯ КОРОТКОГО TTI | 2018 |
|
RU2718120C1 |
| СЕТЕВАЯ АРХИТЕКТУРА, СПОСОБЫ И УСТРОЙСТВА ДЛЯ СЕТИ БЕСПРОВОДНОЙ СВЯЗИ | 2017 |
|
RU2693848C1 |
| (ДЕ)АКТИВАЦИЯ КОМПОНЕНТНОЙ НЕСУЩЕЙ В СИСТЕМАХ СВЯЗИ, ИСПОЛЬЗУЮЩИХ АГРЕГАЦИЮ НЕСУЩИХ | 2011 |
|
RU2574610C2 |
| БАЗОВЫЕ СТАНЦИИ И СПОСОБЫ | 2019 |
|
RU2795823C2 |
| СТРУКТУРА УПРАВЛЕНИЯ ТРАНЗИТНОЙ РЕТРАНСЛЯЦИЕЙ ДЛЯ ПОДДЕРЖКИ НЕСКОЛЬКИХ ПРОЦЕССОВ HARQ | 2010 |
|
RU2485686C1 |
| ФИЛЬТРАЦИЯ ЛОЖНЫХ ТРЕВОГ ПОЛУПОСТОЯННОГО ПЛАНИРОВАНИЯ | 2009 |
|
RU2449508C1 |
| Способ планирования повторных передач для сконфигурированных грантов в системе NR с нелицензированным спектром | 2019 |
|
RU2784411C1 |
| СПОСОБ И ПОЛЬЗОВАТЕЛЬСКОЕ ОБОРУДОВАНИЕ ДЛЯ СЖАТИЯ ОБРАТНОЙ СВЯЗИ HARQ | 2016 |
|
RU2679245C1 |
| КАДРИРОВАНИЕ, ДИСПЕТЧЕРИЗАЦИЯ И СИНХРОНИЗАЦИЯ В СИСТЕМАХ БЕСПРОВОДНОЙ СВЯЗИ | 2016 |
|
RU2694586C1 |
| ДЕТЕРМИНИСТИЧЕСКОЕ ПОВЕДЕНИЕ UE ДЛЯ СООБЩЕНИЯ CSI/SRS ВО ВРЕМЯ DRX | 2013 |
|
RU2739584C2 |
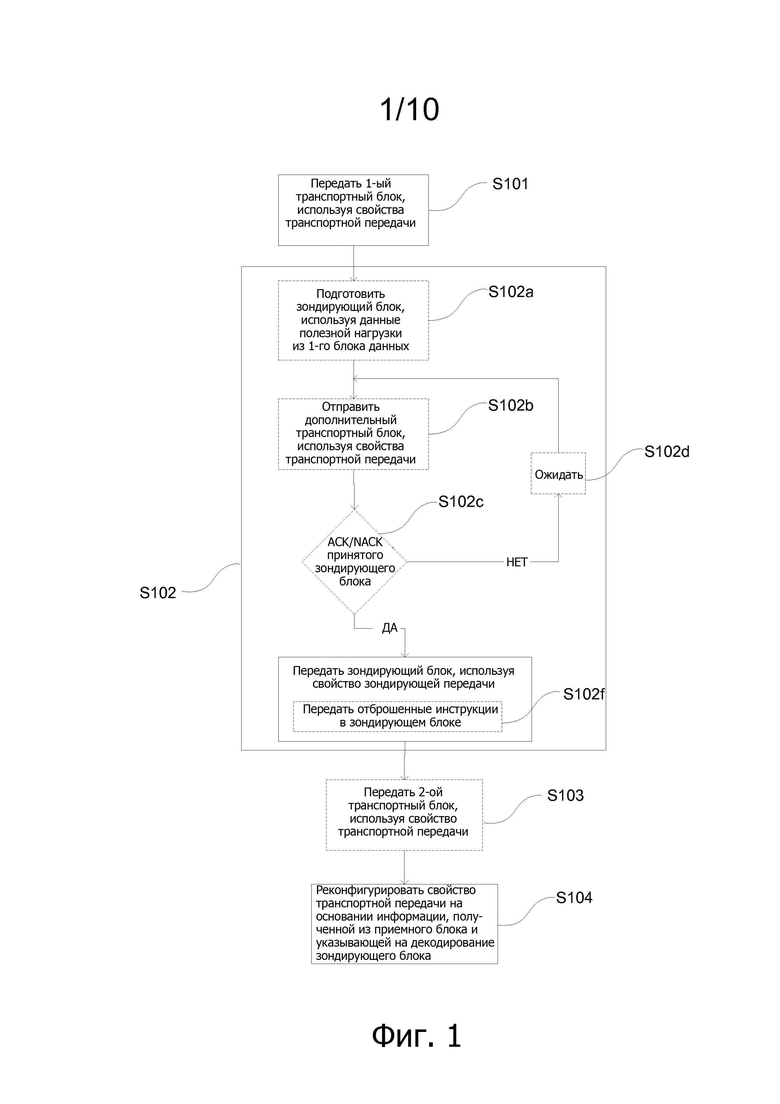
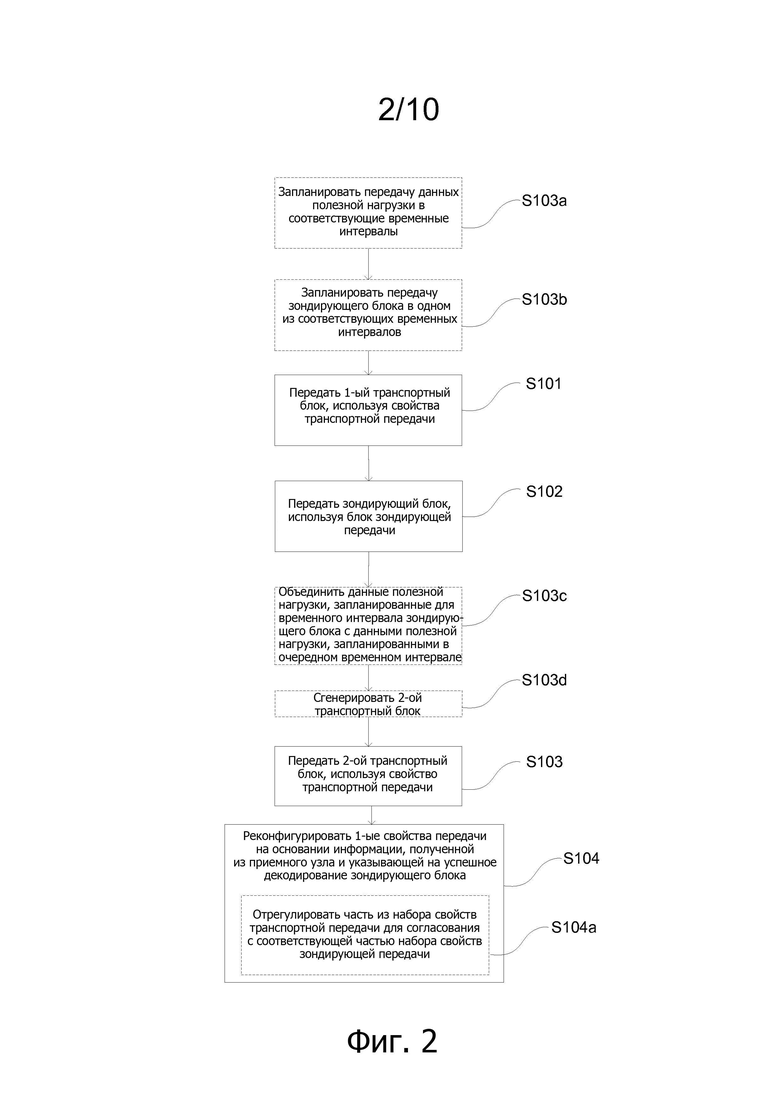
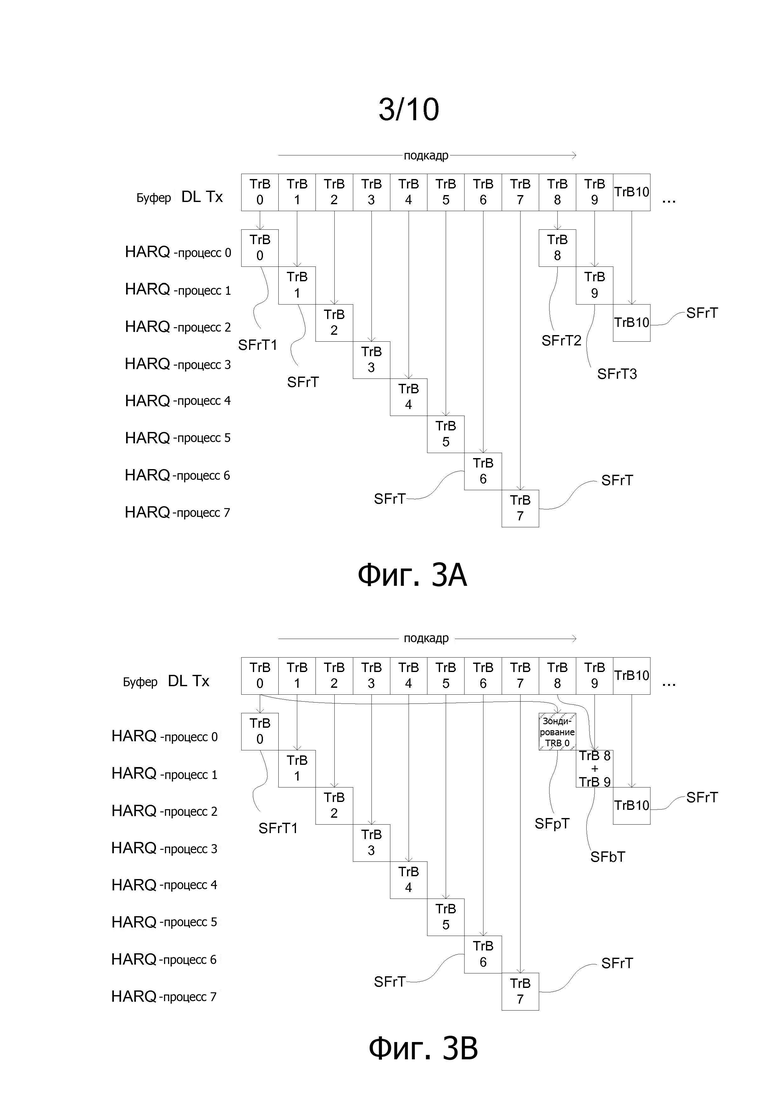
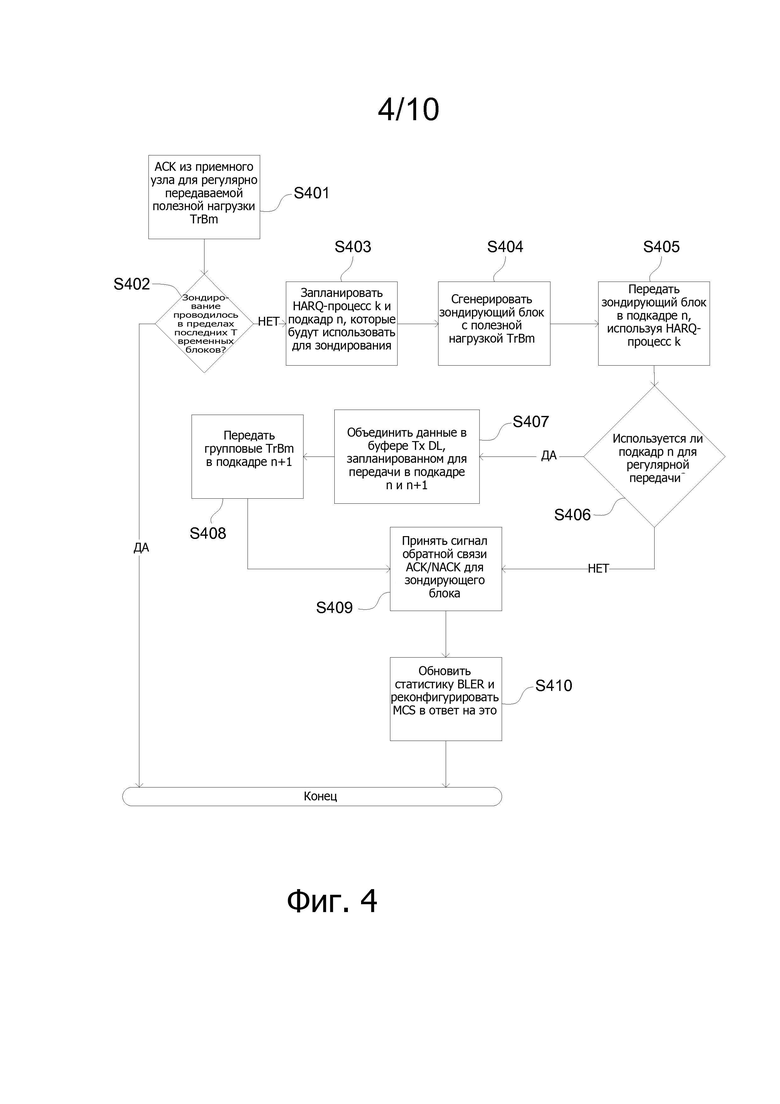
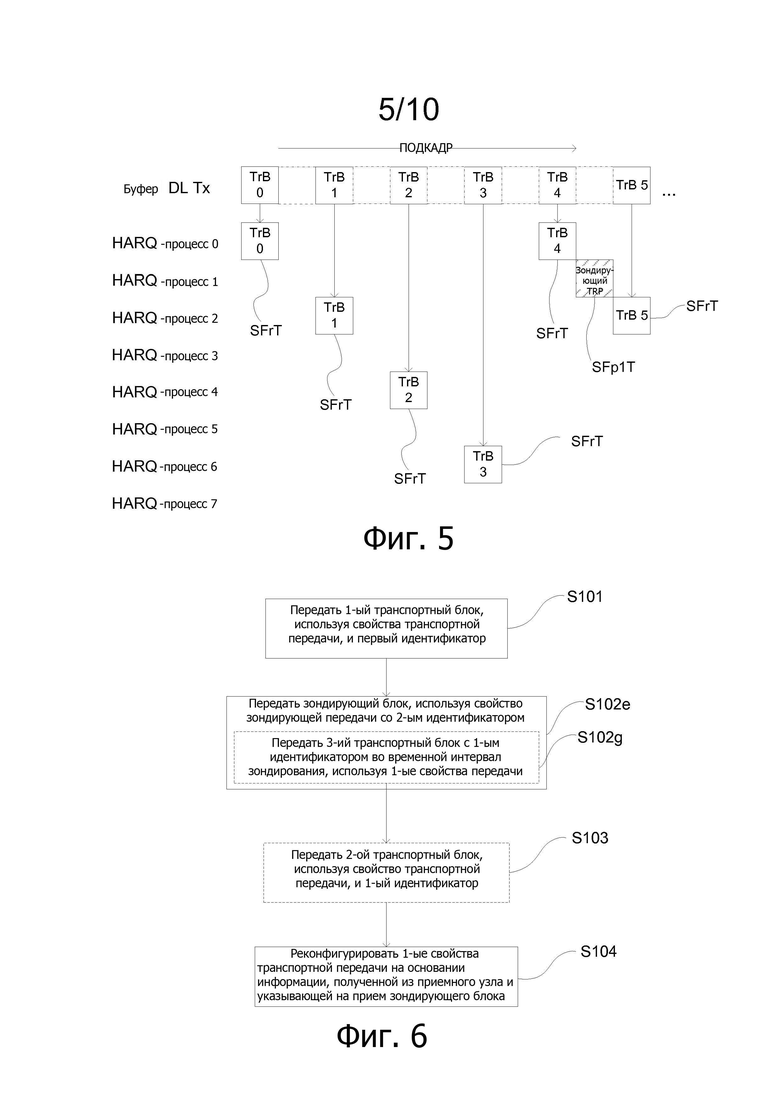
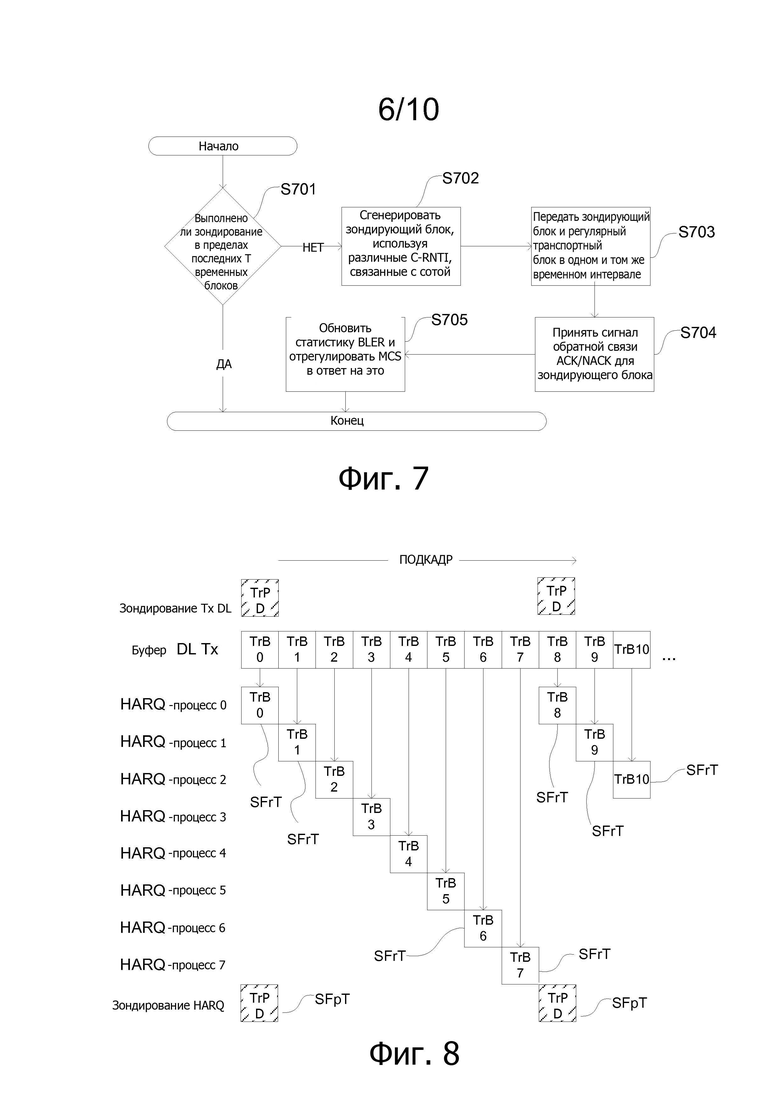
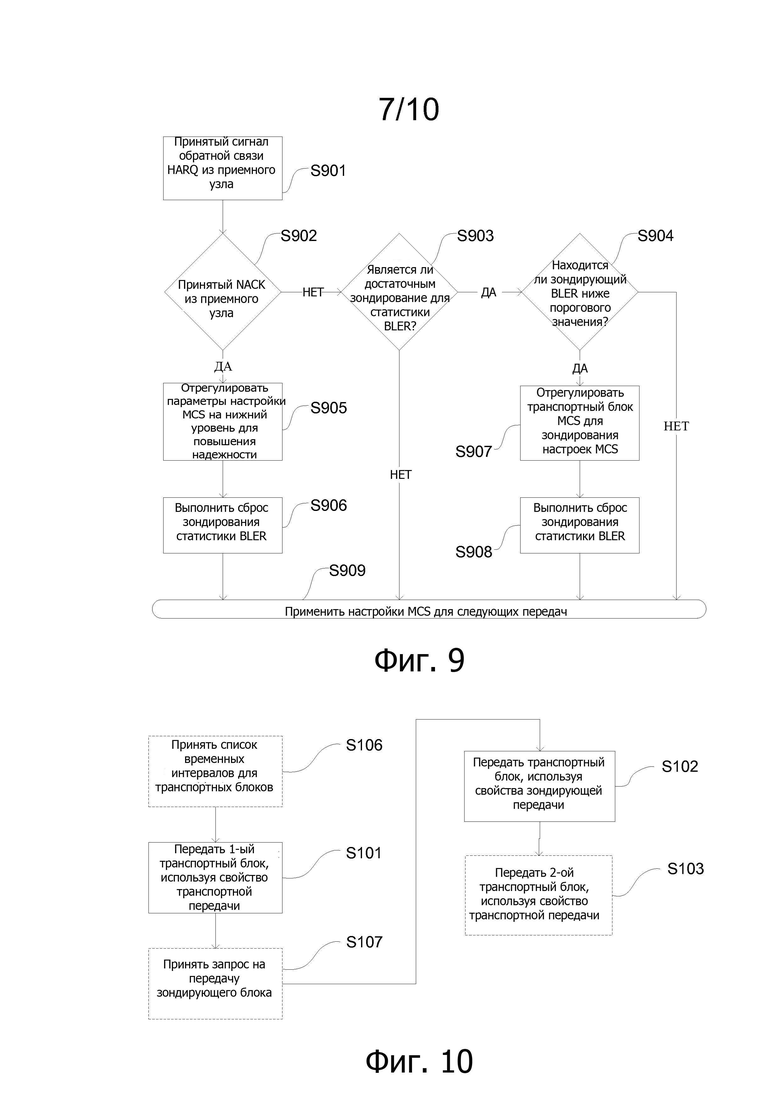
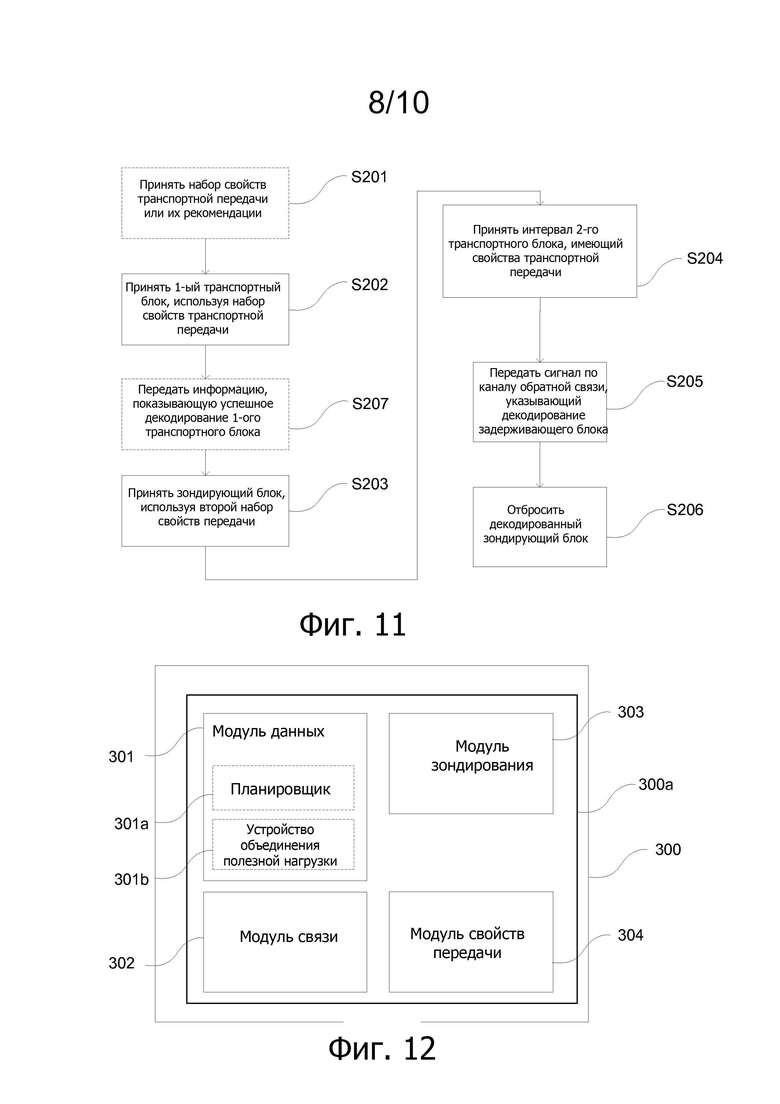
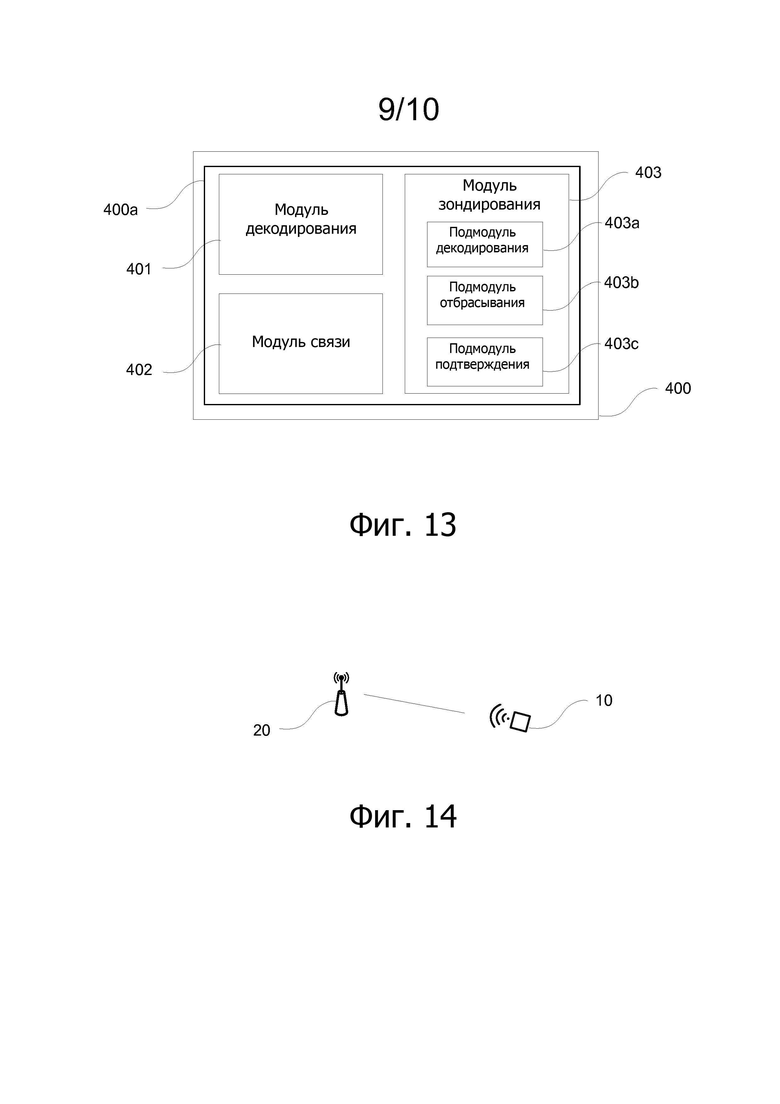
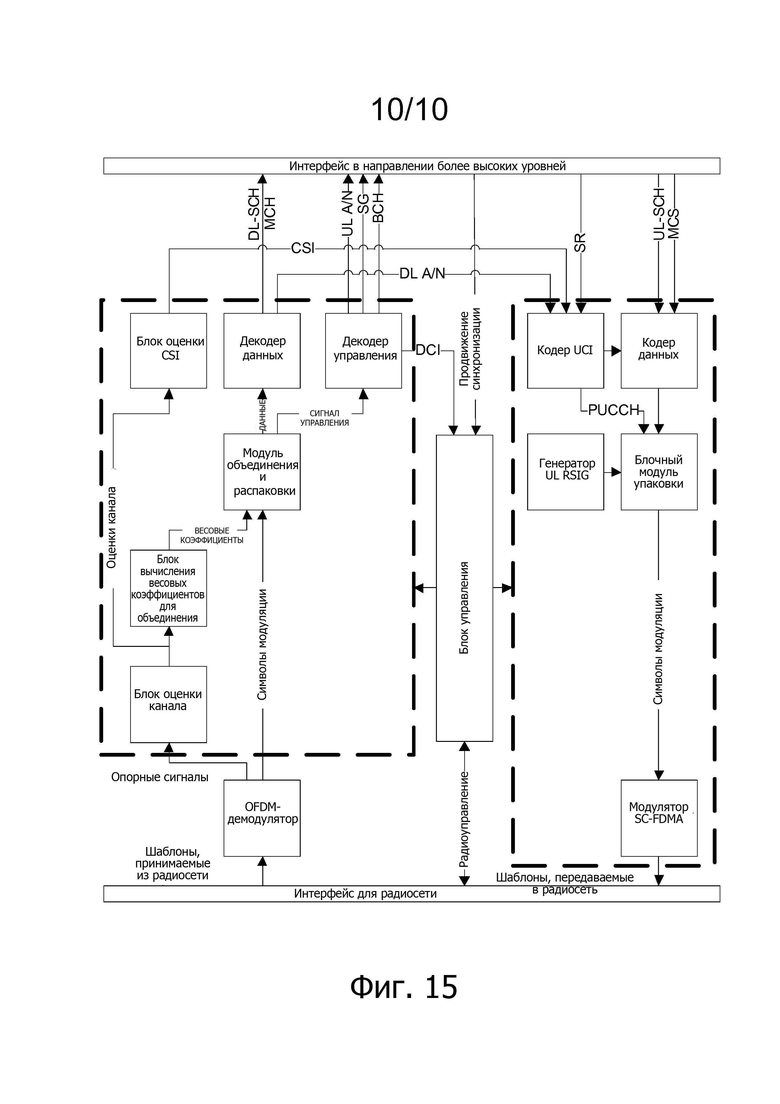
Изобретение относится к области вычислительной техники. Технический результат заключается в эффективном использовании ресурсов. Способ содержит этапы, на которых: передают первый транспортный блок с использованием набора свойств транспортной передачи на приемный узел; передают зондирующий блок на приемный узел с использованием набора свойств зондирующей передачи, причем зондирующий блок содержит данные полезной нагрузки, также содержащиеся в указанном транспортном блоке; реконфигурируют набор свойств транспортной передачи для дополнительных транспортных блоков на основании информации, переданной приемным узлом и указывающей на успешное декодирование зондирующего блока приемным узлом. 3 н. и 12 з.п. ф-лы, 15 ил., 2 табл.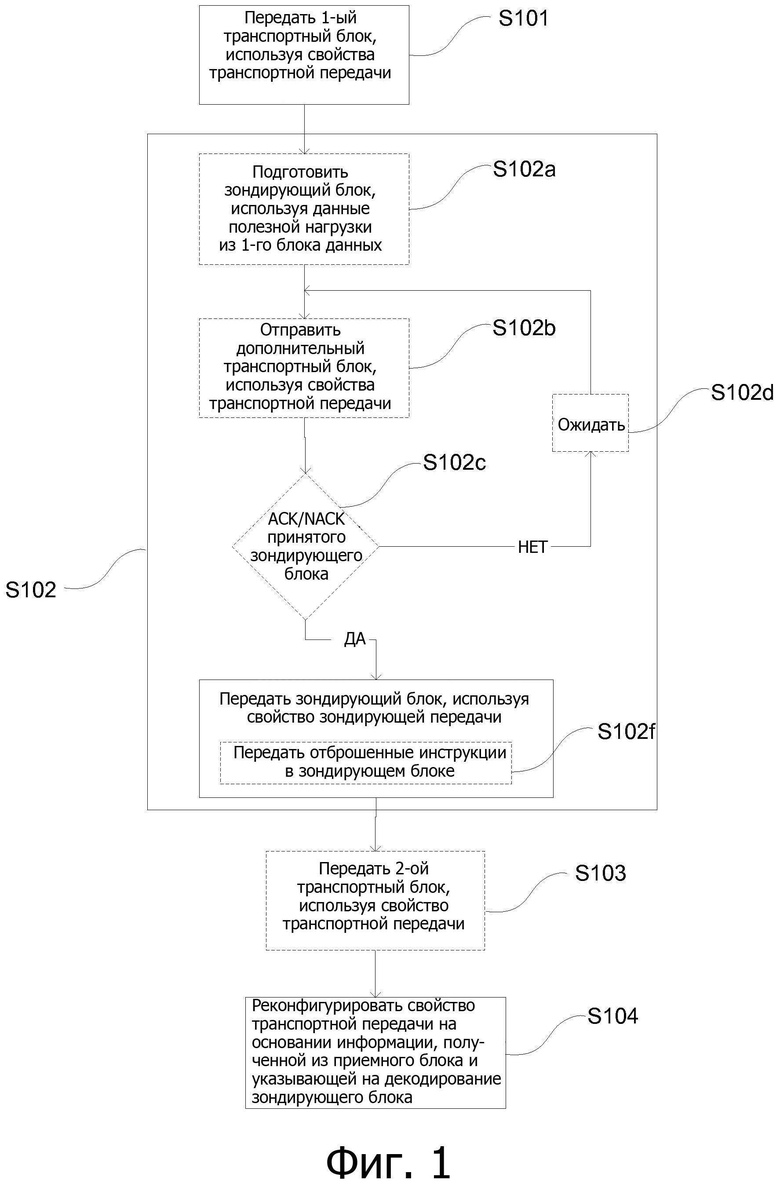
1. Способ, выполняемый передающим узлом радиосети для регулировки свойств передачи для передачи данных, содержащий этапы, на которых:
передают первый транспортный блок (S101) с использованием набора свойств транспортной передачи на приемный узел; передают зондирующий блок (S102) на приемный узел с использованием набора свойств зондирующей передачи, которые приводят к снижению надежности передачи по отношению к набору свойств транспортной передачи, используемых для первого транспортного блока, причем зондирующий блок содержит данные полезной нагрузки, также содержащиеся в указанном транспортном блоке;
реконфигурируют (S104) набор свойств транспортной передачи для дополнительных транспортных блоков на основании информации, переданной приемным узлом и указывающей на успешное декодирование зондирующего блока приемным узлом.
2. Способ по п. 1, дополнительно содержащий по меньшей мере один из этапов, на которых:
передают вторичный транспортный блок (S103) с использованием набора свойств транспортной передачи после передачи зондирующего блока и
принимают информацию (S102c), указывающую на успешное декодирование первого транспортного блока.
3. Способ по п. 1 или 2, в котором этап реконфигурирования содержит подэтап, на котором регулируют (S104a) по меньшей мере часть из набора свойств транспортной передачи для согласования соответствующей части из набора свойств зондирующей передачи.
4. Способ по п. 1 или 2, в котором этап реконфигурирования содержит подэтап, на котором регулируют (S104a) по меньшей мере часть из набора свойств транспортной передачи для того, чтобы добиться надежности передачи, которая ниже, чем надежность передачи набора свойств транспортной передачи, используемых при передаче первого транспортного блока, но выше, чем надежность передачи набора свойств зондирующей передачи.
5. Способ по любому из пп. 1-4, дополнительно содержащий этапы, на которых:
планируют данные полезной нагрузки (S103a), подлежащие передаче в транспортных блоках в соответствующие временные интервалы;
планируют зондирующий блок (S103b), подлежащий передаче во время одного из соответствующих временных интервалов;
объединяют данные полезной нагрузки (S103c), запланированные во время одного из соответствующих временных интервалов, с данными полезной нагрузки, запланированными в следующем временном интервале; и
генерируют второй транспортный блок (S103d) с использованием объединенной полезной нагрузки.
6. Способ по п. 5, в котором этап объединения данных полезной нагрузки (S103c) содержит подэтап, на котором объединяют данные полезной нагрузки, запланированные в одном из соответствующих временных интервалов, с данными полезной нагрузки, запланированными во временном интервале непосредственно после одного из соответствующих временных интервалов.
7. Способ по любому из пп. 1-6, в котором каждый из транспортных блоков содержит первый идентификатор, ассоциированный с приемным узлом, а зондирующий блок содержит второй идентификатор, ассоциированный с приемным узлом.
8. Способ по любому из пп. 1-7, в котором этап передачи зондирующих блоков выполняется в ответ на соответствующий запрос от приемного узла.
9. Блок памяти, хранящий компьютерную программу, содержащую код компьютерной программы, который при исполнении на программируемом контроллере узла в радиосети вызывает выполнение упомянутым узлом способов по любому из пп. 1-8.
10. Узел (300) передачи в радиосети, содержащий одну или более схем обработки, при этом схема обработки содержит:
модуль (301) данных, выполненный с возможностью обеспечения первого и второго транспортных блоков, содержащих данные полезной нагрузки, с использованием набора свойств транспортной передачи;
модуль (303) зондирования, выполненный с возможностью обеспечения зондирующего блока с использованием набора свойств зондирующей передачи, имеющего пониженную надежность передачи по отношению к набору свойств транспортной передачи, при этом модуль (303) зондирования выполнен с возможностью обеспечения зондирующего блока, содержащего данные полезной нагрузки, включенные в по меньшей мере один из первого и второго транспортных блоков;
модуль (302) связи, выполненный с возможностью передачи первого и второго транспортных блоков и зондирующего блока между передачей первого и второго транспортных блоков на приемный узел;
модуль (304) свойств передачи, выполненный с возможностью реконфигурирования набора свойств транспортной передачи в ответ на успешное подтверждение декодирования зондирующего блока, обеспечиваемого приемным узлом.
11. Узел по п. 10, в котором модуль (304) свойств передачи выполнен с возможностью регулировки по меньшей мере части из набора свойств транспортной передачи для согласования соответствующей части из набора свойств зондирующей передачи.
12. Узел по п. 10, в котором модуль (304) свойств передачи выполнен с возможностью регулировки по меньшей мере части из набора свойств транспортной передачи для обеспечения надежности передачи, которая ниже, чем надежность передачи набора свойств транспортной передачи, используемых при передаче первого транспортного блока, но выше, чем надежность передачи набора свойств зондирующей передачи.
13. Узел по любому из пп. 10-12, в котором модуль (302) связи выполнен с возможностью передачи зондирующего блока после приема приемным узлом положительного подтверждения транспортного блока, содержащего упомянутые данные полезной нагрузки.
14. Узел по любому из пп. 10-13, в котором модуль (301) данных содержит:
планировщик (301a), выполненный с возможностью планирования данных полезной нагрузки, подлежащих передаче в течение соответствующих временных интервалов, и
устройство (301b) объединения, выполненное с возможностью объединения данных полезной нагрузки, запланированных для передачи во временном интервале, в течение которого запланирована передача зондирующих данных, и данных полезной нагрузки, запланированных в следующем временном интервале, в частности, во временном интервале, следующем сразу после передачи зондирующих данных, и для обеспечения транспортного блока, содержащего упомянутые объединенные данные полезной нагрузки.
15. Узел по любому из пп. 10-14, в котором
модуль (301) данных выполнен с возможностью обеспечения транспортного(ых) блока(ов), имеющего(их) первый идентификатор, ассоциированный с приемным узлом; а модуль (303) зондирования выполнен с возможностью обеспечения зондирующего блока, имеющего второй идентификатор, ассоциированный с приемным узлом.
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| RU 2011139711 A, 10.04.2013. | |||

