ОБЛАСТЬ ТЕХНИКИ
[0001] Раскрытие настоящего изобретения относится к области виртуальной реальности, а более конкретно - к способу, устройству и электронному оборудованию для управления виртуальной реальностью.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] На современном уровне техники взаимодействие между устройством виртуальной реальности (VR, Virtual Reality) и мобильным телефоном обычно осуществляется с помощью манипуляторов VR-устройств. Например, пользователь активизирует VR-устройство путем нажатия кнопок на сенсорном манипуляторе, таких как кнопки "вверх", "вниз", "влево", "вправо", "ввод" и т.д. Однако, когда пользователь носит на себе VR-устройство, то поскольку его взгляд направлен на дисплей этого устройства, он не видит кнопок, а только ощущает их при прикосновении. В такой ситуации пользователь может ошибиться при нажатии на кнопки, что создает для него неудобство в процессе работы с устройством.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] Для решения проблем, существующих в данной области техники, в рамках вариантов раскрытия настоящего изобретения предлагаются способ, устройство и электронное оборудование для повышения удобства при работе с VR-устройствами.
[0004] В соответствии с первым аспектом раскрытия настоящего изобретения предлагается способ управления виртуальной реальностью (VR), включающий:
[0005] Получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение заданного периода времени, определяемого первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления;
[0006] определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени; и
[0007] управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения.
[0008] В соответствии с одним из вариантов осуществления определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени, может включать:
[0009] определение направления передвижения, в котором носимое VR-устройство передвигается в трехмерном пространстве, на основе данных датчика, полученных в течение заданного периода времени; и
[0010] визуализацию траектории передвижения носимого VR-устройства на дисплее VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически по направлению передвижения.
[0011] В соответствии с одним из вариантов осуществления визуализация траектории передвижения носимого VR-устройства на дисплее VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически по направлению передвижения может включать:
[0012] в первый момент времени визуализацию первого набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства;
[0013] визуализацию траектории передвижения, соответствующей данным датчика, полученным в течение заданного периода времени, хронологически по направлению передвижения; и
[0014] во второй момент времени визуализацию последнего набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства, после чего указанная визуализация траектории передвижения носимого VR-устройства завершается.
[0015] В соответствии с одним из вариантов осуществления указанное управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения, может включать:
[0016] определение, существует ли целевая траектория, согласующаяся с формой траектории передвижения, в множестве опорных траекторий, соответствующих рабочей инструкции для управления устройством выполнения функций VR;
[0017] определение рабочей инструкции, соответствующей целевой траектории; и
[0018] управление устройством выполнения функций VR для выполнения операции, соответствующей рабочей инструкции.
[0019] В соответствии с вариантом осуществления настоящего изобретения способ может также включать:
[0020] генерацию сообщения с предложением передвижения носимого VR-устройства, если определяется, что целевая траектория отсутствует в множестве опорных траекторий; и
[0021] очистку данных датчика, накопленных в течение заданного периода времени.
[0022] Согласно одному из вариантов осуществления указанное получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение заданного периода времени, определяемого первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления, может включать:
[0023] получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение указанного периода времени, из первого гироскопического датчика, если принимается первая инструкция управления из манипулятора, прикрепленного к носимому VR-устройству; и
[0024] после приема второй инструкции управления из манипулятора, завершение получения данных из первого гироскопического датчика и завершение получения данных датчика в течение заранее заданного периода времени.
[0025] В соответствии с одним из вариантов осуществления указанное получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение указанного периода времени, может включать:
[0026] генерацию первой инструкции управления и определение первого момента времени, в который сгенерирована первая инструкция управления, если обнаруживается, что активизирована заранее заданная кнопка на носимом VR-устройстве;
[0027] получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве и собранных вторым гироскопическим датчиком носимого VR-устройства в соответствии с первой инструкцией управления;
[0028] генерацию второй инструкции управления и определение второго момента времени, в который сгенерирована вторая инструкция управления, если обнаруживается, что снова активизирована заранее заданная кнопка; и
[0029] завершение получения данных из второго гироскопического датчика в соответствии со второй инструкцией управления и завершение получения данных датчика в течение заданного периода времени.
[0030] В соответствии со вторым аспектом раскрытия настоящего изобретения предлагается устройство управления виртуальной реальностью (VR), содержащее:
[0031] модуль получения данных, сконфигурированный для получения данных датчика в течение заданного периода времени, в котором VR-устройство передвигается в трехмерном пространстве, при этом заданный период времени определяется первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления;
[0032] модуль определения траектории, сконфигурированный для определения траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени; и
[0033] модуль управления функционированием, сконфигурированный для управления устройством выполнения функций VR с целью выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения.
[0034] Согласно варианту осуществления указанный модуль определения траектории содержит:
[0035] модуль определения направления, сконфигурированный для определения направления передвижения, в котором носимое VR-устройство передвигается в трехмерном пространстве, на основе данных датчиков, полученных в течение заданного периода времени; и
[0036] подмодуль визуализации траектории, сконфигурированный для визуализации траектории передвижения носимого VR-устройства на дисплее VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически в направлении передвижения.
[0037] Согласно варианту осуществления указанный подмодуль визуализации траектории может быть сконфигурирован для:
[0038] в первый момент времени визуализации первого набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства;
[0039] визуализации траектории передвижения, соответствующей данным датчика, полученным в течение заданного периода времени, хронологически по направлению передвижения;
[0040] во второй момент времени визуализации последнего набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства, после чего указанная визуализация траектории передвижения носимого VR-устройства завершается.
[0041] Согласно варианту осуществления указанный модуль управления функционированием может содержать:
[0042] подмодуль определения траектории, сконфигурированный для определения целевой траектории, согласующейся с формой траектории передвижения, из множества опорных траекторий, соответствующих рабочей инструкции, для управления устройством выполнения функций VR;
[0043] подмодуль определения рабочей инструкции, сконфигурированный для определения рабочей инструкции, соответствующей целевой траектории; и
[0044] и подмодуль выполнения операции, сконфигурированный для управления устройством выполнения функций VR с целью выполнения операции, соответствующий рабочей инструкции.
[0045] Согласно одному из вариантов осуществления устройство также может содержать:
[0046] модуль генерации подсказки, сконфигурированный для генерации сообщения с предложением передвижения носимого VR-устройства, если определено, что целевая траектория отсутствует в множестве опорных траекторий; и
[0047] модуль очистки данных, сконфигурированный для очистки данных датчика, накопленных в течение заданного периода времени.
[0048] В соответствии с вариантом осуществления указанный модуль получения данных может содержать:
[0049] первый подмодуль получения данных, сконфигурированный для получения данных датчика электронного устройства, указывающих на передвижение носимого VR-устройства в трехмерном пространстве, из первого гироскопического датчика, если принимается первая инструкция управления из манипулятора, прикрепленного к носимому VR-устройству;
[0050] первый подмодуль завершения, сконфигурированный для завершения получения данных из первого гироскопического датчика и завершения получения данных датчика в течение заранее заданного периода времени после приема второй инструкции управления из манипулятора.
[0051] В соответствии с вариантом осуществления указанный модуль получения данных может содержать:
[0052] подмодуль генерации первой инструкции, сконфигурированный для генерации первой инструкции управления и определения первого момента времени, в который сгенерирована первая инструкция управления, если обнаруживается, что активизирована заранее заданная кнопка на носимом VR-устройстве;
[0053] второй подмодуль получения данных, сконфигурированный для получения данных датчика носимого VR-устройства, передвигающегося в трехмерном пространстве, собранных вторым гироскопическим датчиком носимого VR-устройства, в соответствии с первой инструкцией управления;
[0054] подмодуль генерации второй инструкции, сконфигурированный для генерации второй инструкции управления и определения второго момента времени, в который сгенерирована вторая инструкция управления, если обнаруживается, что снова активизирована заранее заданная кнопка; и
[0055] второй подмодуль завершения, сконфигурированный для завершения получения данных из второго гироскопического датчика в соответствии со второй инструкцией управления и завершения получения данных датчика в течение заданного периода времени.
[0056] В соответствии с третьим аспектом раскрытия настоящего изобретения предлагается электронное оборудование, содержащее:
[0057] процессор и
[0058] память, сконфигурированную для хранения инструкций, которые могут выполняться процессором,
[0059] при этом процессор сконфигурирован для выполнения следующих операций:
[0060] получение данных датчика в течение заданного периода времени, в котором VR-устройство передвигается в трехмерном пространстве, при этом заданный период времени определяется первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления;
[0061] определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени; и
[0062] управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения.
[0063] Путем реализации технического решения, соответствующего вариантам раскрытия настоящего изобретения, можно достичь следующих благоприятных результатов.
[0064] Путем определения траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчиков, полученных в течение заданного периода времени, и путем управления устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения, можно управлять операциями устройства выполнения функций VR на основе движений тела, определяемых данными датчиков, и предотвращать ручное нажатие пользователем различных кнопок на манипуляторе, активизирующих другие операции, и, таким образом, обеспечивать реализацию, устройством выполнения функций VR, требуемого пользователем действия, а также отображать траекторию передвижения, соответствующую визуальным эффектам операции, с помощью дисплея VR-устройства, благодаря чему повышается разнообразие режимов ввода VR-устройства и упрощается взаимодействие между пользователем и VR-устройством.
[0065] Путем отображения траектории передвижения на дисплее VR-устройства пользователь носимого VR-устройства может визуально представлять траекторию, по которой он передвигает носимое VR-устройство. Если траектория передвижения не совпадает с опорной траекторией, пользователь может отрегулировать направление, в котором он передвигает носимое VR-устройство, для улучшения режима работы с оборудованием носимого VR-устройства.
[0066] Путем последовательной визуализации данных датчика в течение заданного периода времени посредством черных точек на дисплее VR-устройства пользователь в реальном времени может визуально ощущать, как процесс управления инструкциями и процесс отображения данных об ускорении соответствуют друг другу, благодаря чему пользователь может более отчетливо ощущать чувство погружения в среду, вызываемое с помощью дисплея VR-устройства.
[0067] При этом у пользователя появляется возможность точно управлять устройством выполнения функций VR благодаря отображению сообщения с предложением повторного передвижения носимого VR-устройства. Путем очистки данных датчика, накопленных в течение заданного периода времени, возможно избежать ситуации, в которой электронное устройство или устройство выполнения функций VR сохраняет слишком много ненужных данных, и повысить эффективность использования области памяти.
[0068] Следует принимать во внимание, что как предшествующее общее описание, так и последующее подробное описание представлено только в качестве примера для разъяснения сути настоящего изобретения и никоим образом не ограничивает его объем.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0069] Прилагаемые чертежи, которые включены в состав этого описания и составляют одну из его частей, иллюстрируют варианты раскрытия настоящего изобретения и совместно с описанием помогают разобраться в принципах настоящего изобретения.
[0070] На фиг. 1А схематично показан алгоритм выполнения способа управления VR в соответствии с примером осуществления настоящего изобретения.
[0071] На фиг. 1В показан первый пример сценария выполнения способа управления VR в соответствии с примером осуществления настоящего изобретения.
[0072] На фиг. 1С показан второй пример сценария выполнения способа управления VR в соответствии с примером осуществления настоящего изобретения.
[0073] На фиг. 2А схематично показан алгоритм выполнения способа управления VR в соответствии с примером осуществления настоящего изобретения.
[0074] На фиг. 2В показан алгоритм выполнения шага 203 в соответствии с вариантом осуществления, изображенным на фиг. 2А.
[0075] На фиг. 3 схематично показан алгоритм выполнения способа управления VR в соответствии со вторым примером осуществления настоящего изобретения.
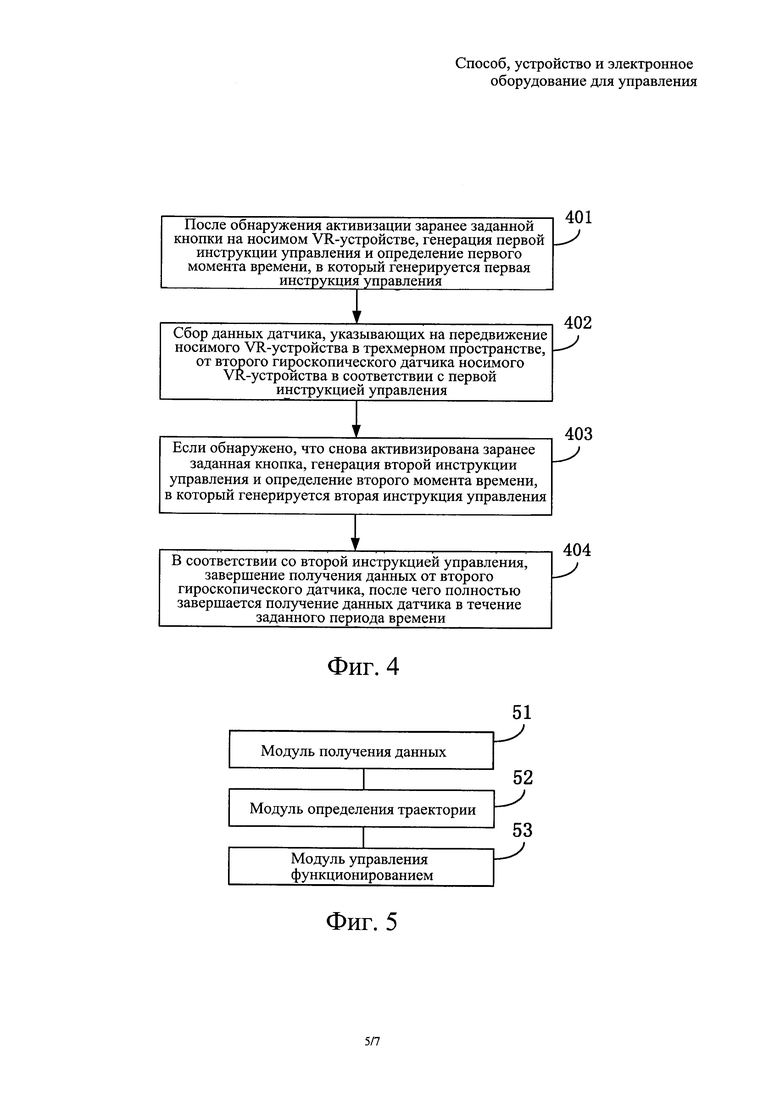
[0076] На фиг. 4 схематично показан алгоритм выполнения способа управления VR в соответствии с третьим примером осуществления настоящего изобретения.
[0077] На фиг. 5 показана структурная блок-схема устройства управления VR в соответствии с примером осуществления настоящего изобретения.
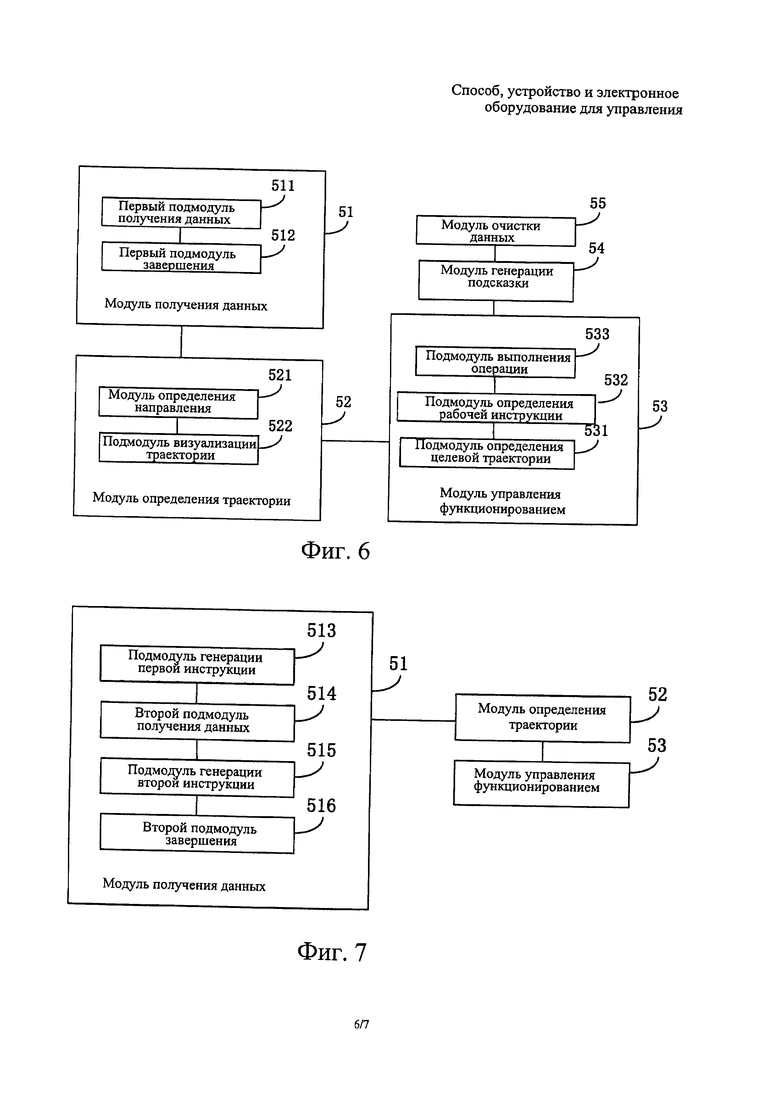
[0078] На фиг. 6 показана структурная блок-схема другого устройства управления VR в соответствии с примером осуществления настоящего изобретения.
[0079] На фиг. 7 показана структурная блок-схема еще одного устройства управления VR в соответствии с примером осуществления настоящего изобретения.
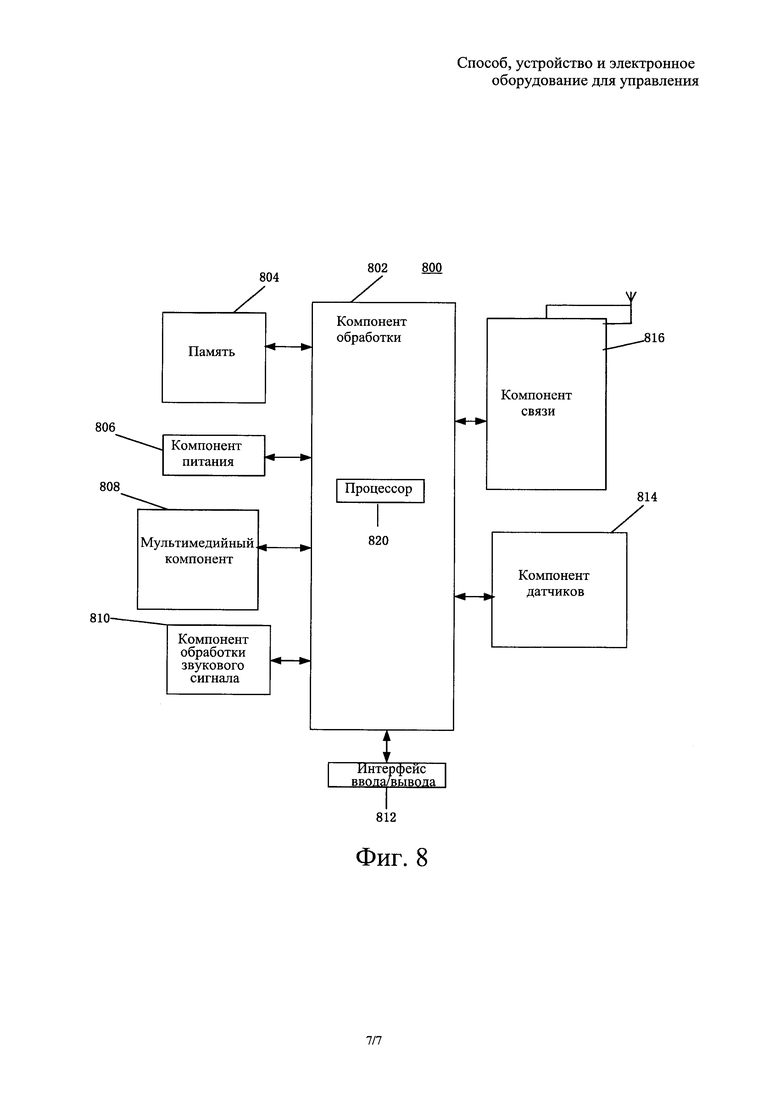
[0080] На фиг. 8 показана блок-схема другого устройства, подходящего для управления VR-устройством в соответствии с примером осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0081] Далее более подробно описываются примеры осуществления настоящего изобретения, проиллюстрированные на чертежах. Последующее описание приводится со ссылками на прилагаемые чертежи, на которых одинаковые цифровые метки обозначают одинаковые или схожие элементы, если явно не указано иное. Описываемые в приведенных ниже примерах варианты осуществления не исчерпывают всех вариантов осуществления, удовлетворяющих принципам настоящего изобретения. Наоборот, в этом описании приводятся только примеры реализации устройств и способов, соответствующих некоторым аспектам настоящего изобретения, сущность которого подробно излагается в прилагаемой формуле изобретения.
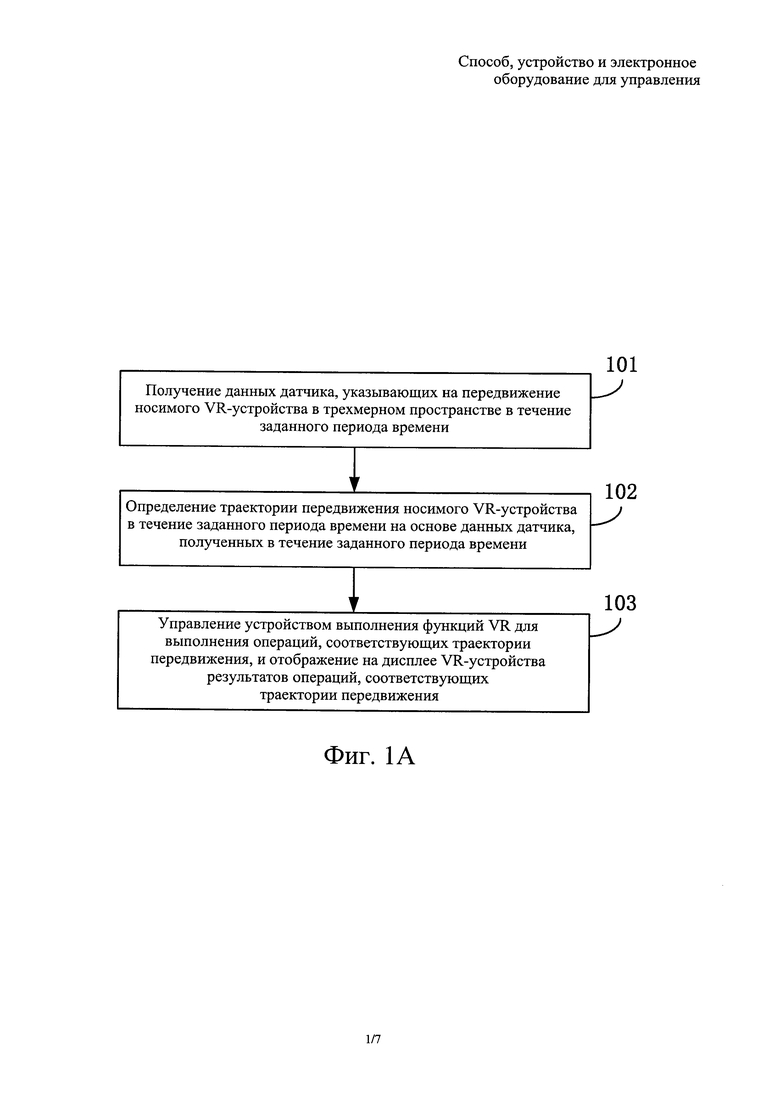
[0082] На фиг. 1А схематично показан алгоритм выполнения способа управления VR в соответствии с примером осуществления настоящего изобретения, на фиг. 1В показан первый пример сценария выполнения способа управления VR в соответствии с примером осуществления настоящего изобретения, и на фиг. 1С показан второй пример сценария выполнения способа управления VR в соответствии с примером осуществления настоящего изобретения. Способ управления VR может применяться в электронном устройстве (например, в смартфоне, планшете, персональном компьютере, VR-устройстве). Как показано на фиг. 1А, способ управления VR включает шаги 101-103.
[0083] На шаге 101 выполняется получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение заданного периода времени, определяемого первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления.
[0084] В соответствии с одним из вариантов осуществления, данные датчика могут представлять собой вращательное угловое ускорение, информация о котором накапливается с помощью гироскопического датчика, или трехмерные данные об ускорении, накопленные датчиком ускорения. Траектория передвижения носимого VR-устройства может идентифицироваться на основе распределения данных датчика, накопленных в течение заранее заданного периода времени. В этот период времени пользователь носит на голове свое VR-устройство. Согласно одному из вариантов осуществления первая и вторая инструкции управления могут быть введены путем нажатия клавиши на манипуляторе, прикрепленном к носимому VR-устройству, или путем нажатия заранее заданной клавиши непосредственно на носимом VR-устройстве.
[0085] Способ на шаге 102 также включает определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени.
[0086] Согласно одному из вариантов осуществления настоящего изобретения пользователь может управлять устройством выполнения функций VR в соответствии с инструкциями для передвижения устройства выполнения функций VR требуемым образом. Например, пользователь наклоняет голову вправо, а затем -влево, поднимает голову и опускает ее, поворачивает голову направо, а затем налево и т.д., в то время как тело остается неподвижным. Указанные выше передвижения могут идентифицироваться на основе накопленных данных датчика.
[0087] На шаге S103 осуществляется управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения.
[0088] Согласно одному из вариантов осуществления траектория передвижения и соответствующая операция могут устанавливаться пользователями с учетом своего привычного поведения при работе с устройством. Например, наклон головы вперед указывает на операцию "подтверждение", подъем головы вверх указывает на операцию "возврат", наклон головы вправо указывает на операцию "плавное передвижение направо", а наклон головы влево указывает на операцию "плавное передвижение налево" и т.д.
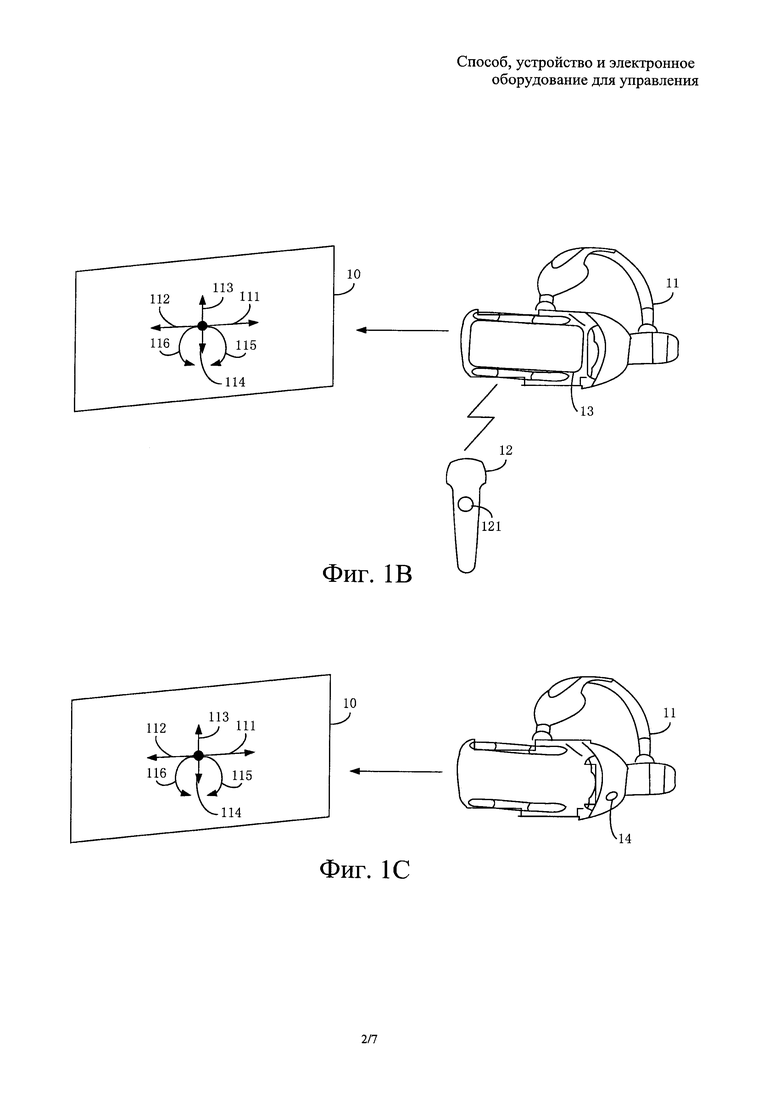
[0089] В одном из примеров сценария, как показано на фиг. 1В, носимое VR-устройство 11 непосредственно оснащено датчиком. Манипулятор 12 прикрепляется к носимому VR-устройству 11. На носимом VR-устройстве 11 может крепиться электронное оборудование 13, такое как дисплей VR-устройства, соединяемый с носимым VR-устройством, и в то же время электронное оборудование 13 в качестве устройства выполнения функций VR может реализовывать алгоритм выполнения способа, раскрываемого в этом описании. Пользователь, носящий VR-устройство 11, может передавать событие DownEvent активизации (то есть, первую инструкцию управления) в электронное оборудование 13 путем активизации кнопки 121 на ручном манипуляторе 12, в результате чего событие DownEvent активизации передается в электронное оборудование 13 по протоколу Bluetooth, если пользователь желает выполнить операцию "плавное передвижение налево". Электронное оборудование 13 после приема события DownEvent активизации получает данные датчика из носимого VR-устройства 11. Если пользователь отпускает кнопку 121, то событие UpEvent активизации (то есть, вторая инструкция управления) передается в электронное оборудование 13 по протоколу Bluetooth. Электронное оборудование 13 определяет траекторию передвижения носимого VR-устройства 11 на основе данных датчика в течение заданного периода времени между моментом приема первой инструкции управления и моментом приема второй инструкции управления. Например, если рассматривать траекторию 112 передвижения, показанную на фиг. 1В, электронное оборудование 13 выполняет операцию "плавное передвижение налево", соответствующую траектории 112 передвижения. В альтернативном варианте электронное оборудование 13 может представлять собой, например, персональный компьютер, и в этой ситуации дисплей VR-устройства может представлять собой экран дисплея, оснащенный носимым VR-устройством 11.
[0090] В другом примере сценария, как показано на фиг. 1С, носимое VR-устройство 11 оснащено датчиком и дисплеем. Манипулятор 12 прикрепляется к носимому VR-устройству 11. Носимое VR-устройство 11, устройство выполнения функций VR и дисплей VR-устройства являются интегральной структурой, которая формирует шлем, при этом носимое VR-устройство 11 может реализовывать алгоритм выполнения процесса, раскрываемого в этом описании. Пользователь, носящий VR-устройство 11, может активизировать заранее заданную кнопку 14 на носимом VR-устройстве 11, если он желает выполнить операцию "плавное передвижение налево". Носимое VR-устройство 11 обнаруживает активизацию заранее заданной кнопки 14 (событие активизации можно рассматривать как первую инструкцию управления, описываемую при раскрытии настоящего изобретения), и траектория передвижения носимого VR-устройства 11 распознается на основе данных датчика, полученных непосредственно этим устройством. Если пользователь отпускает заранее заданную кнопку 14, то носимое VR-устройство 11 может обнаружить событие отпускания (которое можно рассматривать как вторую инструкцию управления, описываемую при раскрытии настоящего изобретения), и затем носимое VR-устройство 11 может определить свою траекторию передвижения в течение заданного периода времени на основе данных датчика, при этом заданный период времени длится между моментом приема первой инструкции управления и моментом приема второй инструкции управления. Например, если рассматривать траекторию 112, показанную на фиг. 1С, носимое VR-устройство 11 управляется для выполнения операции "плавное передвижение налево", соответствующей траектории 112 передвижения.
[0091] На описанных выше фиг. 1В и 1С числовую ссылку 10 можно рассматривать как дисплей электронного устройства 13, применяемого пользователем, или дисплей VR-устройства 11. При раскрытии настоящего изобретения для удобства описания прямоугольник, показанный с помощью числовой ссылки 10, называется эквивалентным экраном 10. Эквивалентный экран 10 является только примером, приведенным с целью разъяснения содержимого, отображаемого на дисплее электронного устройства 13 или на дисплее VR-устройства 11. Во время передвижения носимого VR-устройства 11, например, ссылочный номер 111 может представлять траекторию передвижения пользователя, тело которого остается неподвижным, а голова наклоняется направо, что указывает на операцию "плавное передвижение направо"; ссылочный номер 112 может представлять траекторию передвижения пользователя, тело которого остается неподвижным, а голова наклоняется налево, что указывает на операцию "плавное передвижение налево"; ссылочный номер 113 может представлять траекторию передвижения пользователя, тело которого остается неподвижным, а голова поднимается наверх, что указывает на операцию "возврат"; ссылочный номер 114 может представлять траекторию передвижения пользователя, голова которого наклоняется вниз, что указывает на операцию "подтверждение"; ссылочный номер 115 может представлять траекторию передвижения пользователя, тело которого остается неподвижным, а лицо поворачивается направо, что указывает на операцию "поворот страницы направо"; и ссылочный номер 116 может представлять траекторию передвижения пользователя, тело которого остается неподвижным, а лицо поворачивается налево, что указывает на операцию "поворот страницы налево". Специалисту в этой области техники понятно, что при выполнении каждой операции пользователя на эквивалентном экране 10 отображается только траектория передвижения, совпадающая с этой операцией. Множество траекторий передвижения, показанных на фиг. 1В и 1С, представляют собой примеры различных траекторий передвижения, соответствующих различным операциям, и они не должны рассматриваться в качестве ограничений раскрытия настоящего изобретения.
[0092] Согласно варианту осуществления настоящего изобретения путем определения траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени, управления устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения, пользователь может активизировать различные кнопки на манипуляторе для реализации различных операций с помощью телодвижений таким образом, чтобы устройство выполнения функций VR могло осуществлять действия, которые на самом деле необходимы пользователю. Путем отображения на дисплее VR-устройства визуальных эффектов, соответствующих траекториям передвижения, возрастает многообразие различных режимов ввода устройства выполнения функций VR и упрощается взаимодействие пользователя с дисплеем VR-устройства.
[0093] В соответствии с одним из вариантов осуществления определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени, может включать:
[0094] определение направления передвижения, в котором носимое VR-устройство перемещается в трехмерном пространстве, на основе данных датчика, полученных в течение заданного периода времени; и
[0095] визуализацию траектории передвижения носимого VR-устройства на дисплее VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически по направлению передвижения.
[0096] В соответствии с одним из вариантов осуществления визуализация траектории передвижения носимого VR-устройства на дисплее VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически по направлению передвижения может включать:
[0097] в первый момент времени визуализацию первого набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства;
[0098] визуализацию траектории передвижения, соответствующей данным датчика, полученным в течение заданного периода времени, хронологически по направлению передвижения; и
[0099] во второй момент времени визуализацию последнего набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства, после чего указанная визуализация траектории передвижения носимого VR-устройства завершается.
[00100] В соответствии с одним из вариантов осуществления указанное управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, может включать:
[00101] определение, существует ли целевая траектория, согласующаяся с формой траектории передвижения, в множестве опорных траекторий, соответствующих рабочей инструкции для управления устройством выполнения функций VR;
[00102] определение рабочей инструкции, соответствующей целевой траектории; и
[00103] управление устройством выполнения функций VR для выполнения операции, соответствующей рабочей инструкции.
[00104] В соответствии с вариантом осуществления настоящего изобретения способ может также включать:
[00105] генерацию сообщения с предложением передвижения носимого VR-устройства, если определяется, что целевая траектория отсутствует в множестве опорных траекторий; и
[00106] очистку данных датчика, накопленных в течение заданного периода времени.
[00107] В соответствии с одним из вариантов осуществления указанное получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение указанного периода времени, может включать:
[00108] получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве, из первого гироскопического датчика электронного устройства после приема первой инструкции управления из манипулятора, прикрепленного к носимому VR-устройству; и
[00109] после приема второй инструкции управления из манипулятора завершение получения данных из первого гироскопического датчика для завершения получения данных датчика в течение заранее заданного периода времени.
[00110] В соответствии с одним из вариантов осуществления указанное получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение указанного периода времени, может включать:
[00111] генерацию первой инструкции управления и определение первого момента времени, в который сгенерирована первая инструкция управления, если обнаруживается, что активизирована заранее заданная кнопка на носимом VR-устройстве;
[00112] получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве и собранных вторым гироскопическим датчиком носимого VR-устройства в соответствии с первой инструкцией управления;
[00113] генерацию второй инструкции управления и определение второго момента времени, в который сгенерирована вторая инструкция управления, если обнаруживается, что снова активизирована заранее заданная кнопка; и
[00114] завершение получения данных из второго гироскопического датчика в соответствии со второй инструкцией управления и завершение получения данных датчика в течение заданного периода времени.
[00115] Описываемые далее варианты осуществления представлены для объяснения, каким образом выполняется получение данных датчика.
[00116] Посредством способа, раскрытого выше в рамках вариантов раскрытия настоящего изобретения, могут обнаруживаться телодвижения для управления работой устройства выполнения функций VR и для предотвращения ошибочного нажатия пользователем других кнопок на манипуляторе, активизирующих другую операцию, благодаря чему устройство выполнения функций VR может осуществлять действие, на самом деле требуемое пользователю, благодаря чему возрастает многообразие различных режимов ввода устройства выполнения функций VR и упрощается взаимодействие пользователя с дисплеем VR-устройства.
[00117] Далее на примерах подробно объясняются технические решения, реализуемые посредством вариантов раскрытия настоящего изобретения.
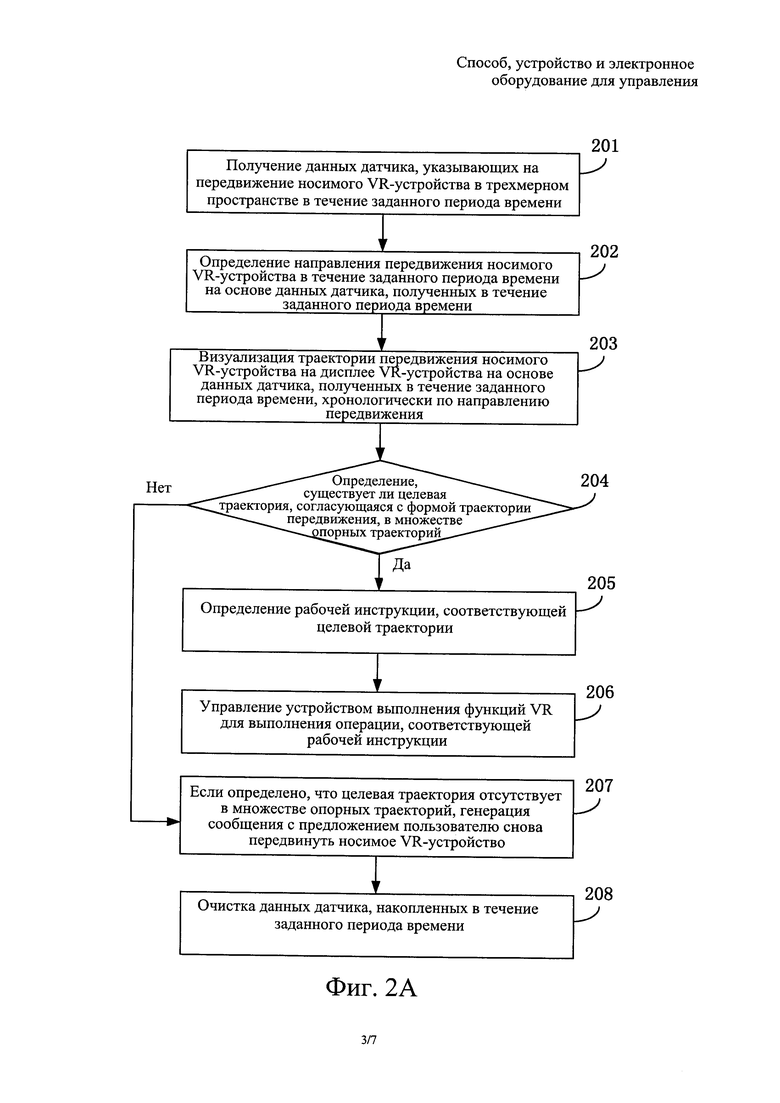
[00118] На фиг. 2А схематично показан алгоритм выполнения способа управления VR в соответствии с первым примером осуществления настоящего изобретения. На фиг. 2В показан алгоритм выполнения шага 203 в соответствии с вариантом осуществления, изображенным на фиг. 2А. Далее в рамках первого варианта осуществления описывается рассмотренный выше способ, представленный вариантами раскрытия настоящего изобретения. Объяснение способа визуализации траектории передвижения на дисплее VR-устройства приводится на примере со ссылкой на фиг. 1В и 1С. Как показано на фиг. 2А, способ включает следующие шаги.
[00119] На шаге 201 выполняется получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение заданного периода времени, определяемого первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления.
[00120] Подробная информация о выполнении шага 201 приведена при описании фиг. 1А, обсуждавшегося выше, или при описании вариантов осуществления, показанных на фиг. 3 или фиг. 4, которые обсуждаются ниже, поэтому в данном случае подробности выполнения этого шага опускаются.
[00121] На шаге 202 определяется направление передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени.
[00122] Согласно одному из вариантов осуществления в качестве примера данных датчика приводятся описания для углового ускорения в шести направлениях, накопленного гироскопическим датчиком. Согласно одному из вариантов осуществления путем преобразования значений углового ускорения в шести направлениях в кватернион вычисляется положение носимого VR-устройства в трехмерном пространстве на основе кватерниона, и на основе положения далее определяется направление передвижения носимого VR-устройства в трехмерном пространстве. Способ вычисления положения носимого VR-устройства в трехмерном пространстве приводится в описании, касающемся соответствующей области техники, и в данном раскрытии подробная информация опускается.
[00123] На шаге 203 выполняется визуализация траектории передвижения носимого VR-устройства на дисплее VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически по направлению передвижения.
[00124] Подробную информацию о выполнении шага 203 можно получить из последующего описания фиг. 2В, и при описании данного шага эта информация не приводится.
[00125] На шаге 204 определяется, существует ли целевая траектория, согласующаяся с формой траектории передвижения, в множестве опорных траекторий, при этом каждая из множества опорных траекторий соответствует рабочей инструкции для управления устройством выполнения функций VR; если такая траектория существует, осуществляется переход к шагу 205; в противном случае осуществляется переход к шагу 207.
[00126] Например, согласно одному из вариантов осуществления множество опорных траекторий отображаются на эквивалентном экране 10, как показано на фиг. 1В и 1С, при этом каждая из опорных траекторий соответствует форме, которая может включать направление передвижения и расстояние передвижения по траектории. Описание траекторий приводится в документах, относящихся к соответствующей области техники, поэтому здесь такое описание не приводится.
[00127] На шаге 205 определяется рабочая инструкция, соответствующая целевой траектории.
[00128] На шаге 206 выполняется управление устройством выполнения функций VR для выполнения операции, соответствующей рабочей инструкции.
[00129] Согласно одному из вариантов осуществления, например, если траектория передвижения согласуется с формой траектории, указанной посредством числовой ссылки 111, показанной на фиг. Fig. 1В, то носимое VR-устройство 11 управляется для выполнения операции "плавное передвижение направо", поскольку траектория 111 соответствует инструкции управления операцией "плавное передвижение направо". В соответствии с одним из вариантов осуществления, если электронное оборудование 13 выполняет способ согласно варианту осуществления настоящего изобретения, то электронное оборудование 13 может управлять устройством выполнения функций VR для осуществления операции "плавное передвижение направо", то есть электронное оборудование 13 выполняет операцию "плавное передвижение направо".
[00130] На шаге 207, если определено, что целевая траектория отсутствует в множестве опорных траекторий, генерируется сообщение с предложением пользователю снова переместить носимое VR-устройство.
[00131] На шаге 208 очищаются данные датчика, накопленные в течение заданного периода времени.
[00132] Например, если положение пользователя, носящего VR-устройство 11, является нестандартным, возможно, что форма траектории передвижения не может сбыть согласована с формой одной из множества опорных траекторий. Таким образом, необходимо проинформировать пользователя о необходимости повторного передвижения носимого VR-устройства 11. Согласно одному из вариантов осуществления путем отображения текстового сообщения на эквивалентном экране 10 пользователю может быть предложено снова передвинуть носимое VR-устройство 11. Согласно другому варианту осуществления пользователь может быть проинформирован о необходимости повторного передвижения носимого VR-устройства 11 путем воспроизведения звукового сигнала.
[00133] Благодаря предложению пользователю повторно передвинуть носимое VR-устройство у пользователя появляется возможность точно управлять передвижением носимого VR-устройства. Путем очистки данных датчика, накопленных в течение заданного периода времени, возможно избежать ситуации, в которой электронное оборудование или носимое VR-устройство сохраняет слишком много ненужных данных, и повысить эффективность использования области памяти.
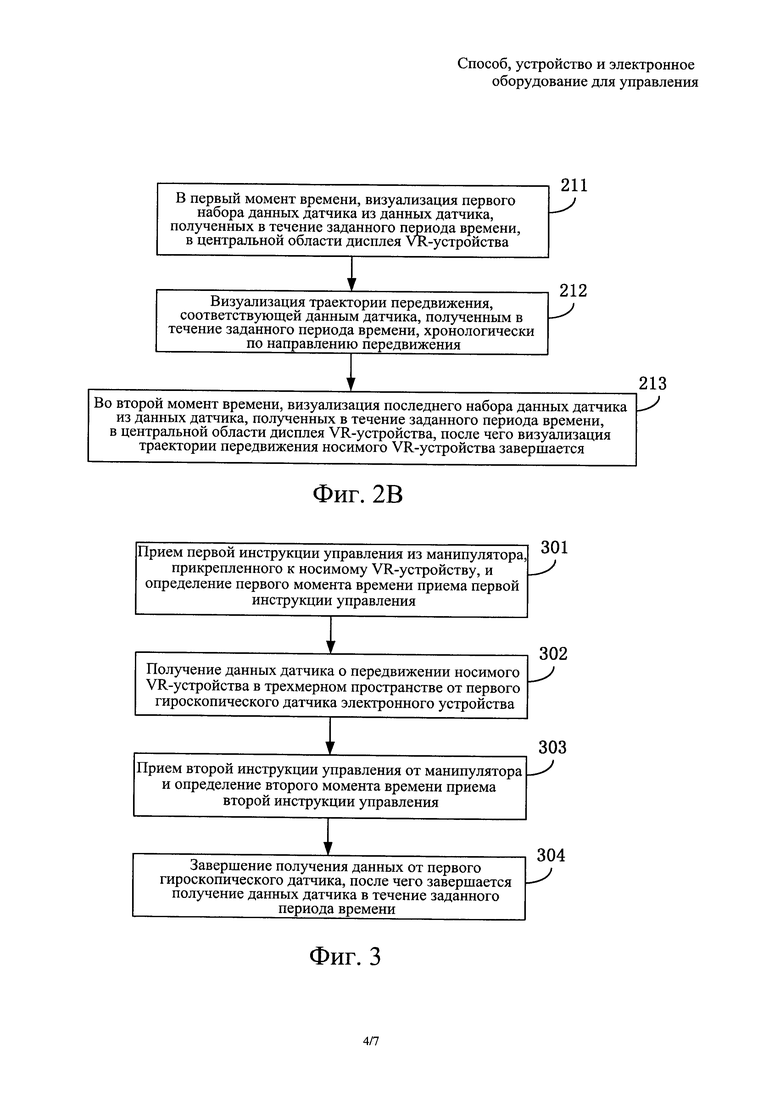
[00134] Как показано на фиг. 2В, шаг 203 может включать следующие дополнительные шаги.
[00135] На шаге 211 в первый момент времени выполняется визуализация первого набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства.
[00136] Например, если датчик накопил 100 наборов данных в течение заранее заданного периода времени, и каждый набор данных датчика содержит данные в каждом направлении, то первый набор данных датчика из 100 наборов может визуализироваться в центральной области дисплея VR-устройства. Например, пользователь может видеть, что первый набор данных датчика визуализируется на эквивалентном экране 10 черными точками, которые указывают центральную позицию дисплея VR-устройства.
[00137] На шаге 212 траектория передвижения, соответствующая данным датчика, полученным в течение заданного периода времени, хронологически визуализируется по направлению передвижения.
[00138] На шаге 213 во второй момент времени выполняется визуализация последнего набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства, после чего указанная визуализация траектории передвижения носимого VR-устройства завершается.
[00139] В соответствии с одним из вариантов осуществления настоящего изобретения первый набор данных датчика может последовательно перемещаться по направлению передвижения носимого VR-устройства, в результате чего черными точками на эквивалентном экране 10 один за другим отображаются второй набор данных датчика, третий набор данных датчика, до тех пор пока не будет принята вторая инструкция управления, после чего на дисплее носимого VR-устройства черными точками визуализируется последний набор данных датчика, что позволяет пользователю визуально ощущать в реальном времени соответствие процессов управления инструкциями и отображения данных об ускорении, благодаря чему более отчетливо ощущается чувство погружения в среду при работе с носимым VR-устройством. Согласно одному из вариантов осуществления данные датчика, совпадающие с направлением передвижения, могут идентифицироваться на основе данных датчика для соответствующих координат в процессе визуализации траектории передвижения, для того чтобы передвижение траектории на дисплее VR-устройства в точности совпадало с направлением передвижения пользователя.
[00140] Согласно варианту осуществления настоящего изобретения данные датчика, полученные в течение заданного периода времени, хронологически визуализируются в виде траектории передвижения носимого VR-устройства, и траектория передвижения отображается на дисплее VR-устройства, что предоставляет пользователю, носящему VR-устройство, визуально представлять траекторию передвижения носимого VR-устройства. Если траектория передвижения не согласуется с опорными траекториями, пользователи могут своевременно отрегулировать направление носимого VR-устройства таким образом, чтобы улучшить режим взаимодействия с носимым VR-устройством.
[00141] На фиг. 3 схематично показан алгоритм выполнения способа управления VR-устройством в соответствии со вторым примером осуществления настоящего изобретения. Далее в рамках второго варианта осуществления описывается рассмотренный выше способ, представленный вариантами раскрытия настоящего изобретения. Объяснение способа сбора данных датчика из первого гироскопического датчика электронного оборудования приводится на примере со ссылкой на фиг 1В. Как показано на фиг. 3, способ включает описываемые ниже шаги.
[00142] На шаге 301 принимается первая инструкция управления из манипулятора, прикрепленного к носимому VR-устройству, и определяется первый момент времени приема первой инструкции управления.
[00143] На шаге 302 выполняется получение данных датчика о передвижении носимого VR-устройства в трехмерном пространстве, накопленных первым гироскопическим датчиком электронного устройства.
[00144] На шаге 303 принимается вторая инструкция управления из манипулятора, и определяется второй момент времени приема второй инструкции управления.
[00145] На шаге 304 завершается получение данных из первого гироскопического датчика, после чего завершается получение данных датчика в течение заданного периода времени.
[00146] В примере сценария, показанного на фиг. 1В, если пользователь нажимает кнопку 121 на манипуляторе 12, то манипулятор 12 генерирует первую инструкцию управления. Электронное оборудование 13 принимает первую инструкцию управления по протоколу Bluetooth и определяет первый момент времени, в который принята первая инструкция управления. Поскольку электронное оборудование 13 установлено на носимом VR-устройстве 11 и функционирует в качестве дисплея VR-устройства, первый гироскопический датчик на электронном оборудовании 13 может собирать данные датчика о передвижении носимого VR-устройства, передвигающегося в трехмерном пространстве, если пользователь носит VR-устройство 11. Если пользователь отпускает кнопку 121, манипулятор 12 генерирует вторую команду управления, и электронное оборудование 13 завершает прием данных датчика из первого гироскопического датчика после приема второй инструкции управления из манипулятора 12, а затем прием данных датчика в течение заданного периода времени завершается.
[00147] Согласно настоящему варианту осуществления передвижение носимого VR-устройства пользователем управляется посредством активизации кнопки на манипуляторе. Поскольку для реализации процесса управления устройством выполнения функций VR требуется только одна кнопка на манипуляторе, конструкция манипулятора упрощается, и затраты на оборудование уменьшаются. Путем использования первого гироскопического датчика, встроенного в электронное оборудование, может упрощаться аппаратная конфигурация носимого VR-устройства и могут снижаться затраты на аппаратуру носимого VR-устройства.
[00148] На фиг. 4 схематично показан алгоритм выполнения способа управления VR в соответствии с третьим примером осуществления настоящего изобретения. Далее в рамках третьего варианта осуществления описывается рассмотренный выше способ, представленный вариантами раскрытия настоящего изобретения. Объяснение способа сбора данных датчика из второго гироскопического датчика носимого VR-устройства приводится на примере со ссылкой на фиг 1С. Как показано на фиг. 4, способ включает описываемые ниже шаги.
[00149] На шаге 401 после обнаружения активизации заранее заданной кнопки на носимом VR-устройстве генерируется первая инструкция управления, и определяется первый момент времени, в который генерируется первая инструкция управления.
[00150] На шаге 402 выполняется сбор данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве, вторым гироскопическим датчиком носимого VR-устройства в соответствии с первой инструкцией управления.
[00151] На шаге 403, если обнаруживается, что заранее заданная кнопка снова активизируется, генерируется вторая инструкция управления, и определяется второй момент времени, в который генерируется вторая инструкция управления.
[00152] На шаге 404 в соответствии со второй инструкцией управления завершается получение данных из второго гироскопического датчика, после чего полностью завершается получение данных датчика в течение заданного периода времени.
[00153] В примере сценария, показанного на фиг. 1С, если пользователь нажимает заранее заданную кнопку 14 на носимом VR-устройстве 11, то это устройство генерирует первую инструкцию управления, и определяется первый момент времени, в который генерируется первая инструкция управления. Если носимое VR-устройство 11 интегрировано с дисплеем носимого VR-устройства и носимое VR-устройство 11 оборудовано вторым гироскопическим датчиком, то когда пользователь, носящий VR-устройство 11, передвигается, данные датчика о передвижении носимого VR-устройства 11 в трехмерном пространстве могут накапливаться вторым гироскопическим датчиком, установленным на носимом VR-устройстве 11. Если пользователь отпускает заранее заданную кнопку 14, носимое VR-устройство 11 генерирует вторую инструкцию управления для завершения получения данных датчика из второго гироскопического датчика, после чего завершается накопление данных датчика в течение заданного периода времени.
[00154] Согласно варианту осуществления настоящего изобретения, поскольку носимое VR-устройство интегрировано с дисплеем VR-устройства и носимое VR-устройство 11 оборудовано вторым гироскопическим датчиком, появляется возможность избежать выполнения излишнего взаимодействия между носимым VR-устройством и электронным оборудованием и, таким образом, повысить эффективность операций управления и работоспособность носимого VR-устройства.
[00155] На фиг. 5 показана структурная блок-схема устройства управления VR в соответствии с примером осуществления настоящего изобретения. Как показано на фиг. 5, носимое VR-устройство содержит:
[00156] модуль 51 получения данных, сконфигурированный для получения данных датчика в течение заданного периода времени, в котором VR-устройство передвигается в трехмерном пространстве, при этом заданный период времени определяется первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления;
[00157] модуль 52 определения траектории, сконфигурированный для определения траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени; и
[00158] модуль 53 управления функционированием, сконфигурированный для управления устройством выполнения функций VR с целью выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения.
[00159] На фиг. 6 показана структурная блок-схема другого устройства управления VR в соответствии с примером осуществления настоящего изобретения. Согласно одному из вариантов осуществления модуль 52 определения траектории содержит:
[00160] модуль 521 определения направления, сконфигурированный для определения направления передвижения, в котором носимое VR-устройство передвигается в трехмерном пространстве, на основе данных датчика, полученных в течение заданного периода времени; и
[00161] подмодуль 522 визуализации траектории, сконфигурированный для визуализации на дисплее VR-устройства траектории передвижения носимого VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически в направлении передвижения, определенном модулем 521 определения направления.
[00162] Согласно одному из вариантов осуществления подмодуль 522 визуализации траектории сконфигурирован для:
[00163] в первый момент времени визуализации первого набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства;
[00164] визуализации траектории передвижения, соответствующей данным датчика, полученным в течение заданного периода времени, хронологически по направлению передвижения;
[00165] во второй момент времени визуализации последнего набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства, после чего указанная визуализация траектории передвижения носимого VR-устройства завершается.
[00166] Согласно одному из вариантов осуществления модуль 53 управления функционированием содержит:
[00167] подмодуль 531 определения траектории, сконфигурированный для определения целевой траектории, согласующейся с формой траектории передвижения, в множестве опорных траекторий, соответствующих рабочей инструкции для управления устройством выполнения функций VR;
[00168] подмодуль 532 определения рабочей инструкции, сконфигурированный для определения рабочей инструкции, соответствующей целевой траектории, определенной подмодулем 531 определения траектории; и
[00169] подмодуль 533 выполнения операции, сконфигурированный для управления устройством выполнения функций VR с целью выполнения операции, соответствующий рабочей инструкции, определенной подмодулем 532 определения рабочей инструкции.
[00170] Согласно одному из вариантов осуществления устройство также может содержать:
[00171] модуль 54 генерации подсказки, сконфигурированный для генерации сообщения с предложением пользователю повторно передвинуть носимое VR-устройство, если определено, что целевая траектория отсутствует в множестве опорных траекторий; и
[00172] модуль 55 очистки данных, сконфигурированный для очистки данных датчика, накопленных в течение заданного периода времени, после того как подмодуль 54 генерации подсказки сгенерировал уведомительное сообщение.
[00173] В соответствии с вариантом осуществления модуль получения данных может содержать:
[00174] первый подмодуль 511 получения данных, сконфигурированный для получения данных датчика электронного устройства, указывающих передвижение носимого VR-устройства в трехмерном пространстве, из первого гироскопического датчика, если принимается первая инструкция управления из манипулятора, прикрепленного к носимому VR-устройству;
[00175] первый подмодуль 512 завершения, сконфигурированный для завершения получения данных из первого гироскопического датчика и завершения получения данных датчика в течение заранее заданного периода времени после приема второй инструкции управления из манипулятора.
[00176] На фиг. 7 показана структурная блок-схема еще одного устройства управления VR в соответствии с примером осуществления настоящего изобретения. Как показано на фиг. 7, на основе варианта осуществления, показанного на фиг. 5, согласно одному из вариантов осуществления модуль 51 получения данных может содержать:
[00177] подмодуль 513 генерации первой инструкции, сконфигурированный для генерации первой инструкции управления и определения первого момента времени, в который сгенерирована первая инструкция управления, если обнаруживается, что активизирована заранее заданная кнопка на носимом VR-устройстве;
[00178] второй подмодуль 514 получения данных, сконфигурированный для получения данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве и собранных вторым гироскопическим датчиком носимого VR-устройства в соответствии с первой инструкцией управления;
[00179] подмодуль 515 генерации второй инструкции, сконфигурированный для генерации второй инструкции управления, если обнаруживается, что снова активизирована заранее заданная кнопка; и
[00180] второй подмодуль 516 завершения, сконфигурированный для завершения получения данных из второго гироскопического датчика в соответствии со второй инструкцией управления, сгенерированной подмодулем 515 генерации второй инструкции, и, таким образом, для завершения получения данных датчика в течение заданного периода времени.
[00181] В том что касается устройства, задействованного в вариантах осуществления настоящего изобретения, приведенных выше, конкретный режим, в котором каждый модуль выполняет операции, был подробно описан в рамках варианта осуществления, относящегося к способу, обсуждавшемуся выше, и поэтому описание такого режима далее подробно не рассматривается.
[00182] На фиг. 8 показана блок-схема другого устройства, подходящего для управления VR-устройством в соответствии с примером осуществления настоящего изобретения. Например, устройство 800 может быть реализовано с помощью электронного оборудования, такого как интеллектуальное устройство, VR-устройство (шлем) и т.п.
[00183] На фиг. 8 показано, что устройство 800 может содержать один или более следующих компонентов: компонент 802 обработки, память 804, компонент 806 питания, мультимедийный компонент 808, компонент 810 обработки звукового сигнала, интерфейс 812 ввода/вывода (I/O, input/output), компонент 814 датчиков и компонент 816 связи.
[00184] Компонент 802 обработки обычно управляет всеми операциями, выполняемыми устройством 800, такими как операции, связанные с отображением, телефонными вызовами, передачей данных, работой видеокамеры и записью данных. Блок 802 обработки может включать в свой состав один или более процессоров 820, предназначенных для выполнения инструкций, осуществляющих все или некоторые шаги способа, описанного выше. Кроме того, компонент 802 обработки может содержать один или более модулей, которые облегчают взаимодействие между компонентом 802 обработки и другими компонентами. Например, компонент 802 обработки может содержать мультимедийный модуль, который облегчает взаимодействие между мультимедийным компонентом 808 и компонентом 802 обработки.
[00185] Память 804 сконфигурирована для хранения данных различных типов, необходимых для функционирования устройства 800. К примерам таких данных относятся инструкции, контактные данные, данные телефонной книги, сообщения, изображения, видеофайлы и т.п. для любых приложений или способов, выполняемых в устройстве 800. Память 804 может быть реализована с использованием любого типа устройств энергозависимой или энергонезависимой памяти, или комбинации таких устройств, например, с помощью статической оперативной памяти (SRAM, Static Random Access Memory), электрически стираемой программируемой постоянной памяти (EEPROM, Electrically Erasable Programmable Read-Only Memory), стираемой программируемой постоянной памяти (EPROM, Erasable Programmable Read-Only Memory), программируемой постоянной памяти (PROM, Programmable Read-Only Memory), постоянной памяти (ROM, Read-Only Memory), магнитного запоминающего устройства, флэш-памяти, диска или CD.
[00186] Компонент 806 питания обеспечивает электропитание для различных компонентов устройства 800. Компонент 806 питания может включать в свой состав систему управления режимом электропитания, один или более источников питания и другие компоненты, связанные с функциями генерации, управления и распределения электропитания в устройстве 800.
[00187] Мультимедийный компонент 808 содержит экран, обеспечивающий выходной интерфейс между устройством 800 и пользователем. В некоторых вариантах осуществления настоящего изобретения экран может представлять собой жидкокристаллический дисплей (LCD, Liquid Crystal Display) и сенсорную панель (TP, Touch Panel). Экран, реализованный в виде сенсорной панели, позволяет принимать входные сигналы от пользователя. На сенсорной панели расположены один или более тактильных датчиков, предназначенных для распознавания прикосновений, сдвига и иных жестикуляций. Тактильные датчики могут не только определять область прикосновения или сдвига, но также реагировать на период времени и давление, связанное с прикосновением или сдвигом. В некоторых вариантах осуществления настоящего изобретения мультимедийный компонент 808 содержит фронтальную видеокамеру и/или тыльную видеокамеру. Фронтальная видеокамера и/или тыльная видеокамера могут принимать внешние мультимедийные данные при нахождении устройства 800 в рабочем режиме, например в режиме выполнения фотосъемки или видеосъемки. Как фронтальная, так и тыльная видеокамера могут оснащаться фиксированной оптической системой линз или средствами оптического масштабирования.
[00188] Компонент 810 обработки звукового сигнала сконфигурирован для передачи и/или приема звукового сигнала. Например, компонент 810 обработки звукового сигнала содержит микрофон (MIC), позволяющий принимать внешний звуковой сигнал, когда устройство 800 находится в рабочем режиме, например в режиме выполнения вызова, записи и распознавания голоса. Принятый звуковой сигнал далее может сохраняться в памяти 804 или передаваться через компонент 816 связи. В некоторых вариантах осуществления компонент 810 обработки звукового сигнала может также содержать громкоговоритель, предназначенный для вывода звуковых сигналов.
[00189] Интерфейс 812 ввода/вывода поддерживает интерфейс между компонентом 802 обработки и модулем периферийного интерфейса, который может представлять собой клавиатуру, колесо мыши, кнопку и т.п. Кнопки, помимо прочего, могут представлять собой кнопку возврата, кнопку настройки уровня звука, кнопку запуска и кнопку блокировки.
[00190] Компонент 814 датчиков содержит один или более датчиков, служащих для условной оценки различных аспектов работы устройства 800. Например, компонент 814 датчиков может обнаруживать открытие/закрытие устройства 800, относительное позиционирование компонентов, например дисплея и клавиатуры, устройства 800. Компонент 814 датчиков также может обнаруживать изменение позиции устройства 800 или компонента устройства 800, наличие или отсутствие контакта пользователя с устройством 800, ориентацию или ускоренное/замедленное передвижение устройства 800 и изменение температуры устройства 800. Компонент 814 датчиков может содержать бесконтактный датчик, сконфигурированный для обнаружения расположенных вблизи объектов без физического контакта с ними. Компонент 814 датчиков также может включать в свой состав светочувствительный элемент, такой как датчик изображения CMOS или CCD, предназначенный для использования в приложениях формирования изображений. В некоторых вариантах осуществления настоящего изобретения компонент 814 датчиков также может содержать акселерометр, гироскоп, магнитный датчик, датчик давления или температуры.
[00191] Компонент 816 связи сконфигурирован для облегчения процесса проводной или беспроводной связи между устройством 800 и другими устройствами. Устройство 800 может получать доступ к беспроводной сети с использованием таких стандартов связи, как WiFi, 2G или 3G, или комбинации этих стандартов. Согласно одному из примеров осуществления настоящего изобретения компонент 816 связи принимает широковещательный сигнал или передает соответствующую информацию в широковещательном режиме из внешней системы управления широковещательной передачей через широковещательный канал. В одном из примеров осуществления настоящего изобретения компонент 816 связи может также содержать модуль ближней связи (NFC, Near Field Communication), позволяющий передавать сигналы на небольшие расстояния. Например, модуль NFC может быть реализован на основе технологии идентификации по радиочастотному коду (RFID, Radio Frequency Identification), технологии ассоциации по средствам передачи данных в инфракрасном диапазоне (IrDA, Infrared Data Association), технологии сверхширокополосной сети (UWB, Ultra-Wideband), технологии Bluetooth (ВТ) и других технологий.
[00192] Согласно примерам осуществления настоящего изобретения устройство 800 может быть реализовано с использованием одного или более таких компонентов, как специализированные интегральные схемы (ASIC, Application Specific Integrated Circuit), цифровые сигнальные процессоры (DSP, Digital Signal Processor), устройства цифровой обработки сигналов (DSPD, Digital Signal Processing Device), программируемые логические устройства (PLD, Programmable Logic Device), программируемые пользователем вентильные матрицы (FPGA, Field Programmable Gate Array), контроллеры, микроконтроллеры, микропроцессоры или другие электронные компоненты, посредством которых выполняется описанный выше способ управления VR, включающий:
[00193] получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение заданного периода времени, определяемого первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления; определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени; и управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения.
[00194] Согласно примеру осуществления настоящего изобретения также предлагается постоянный машиночитаемый носитель информации, на котором хранятся инструкции, такой как память 804, в которой записаны инструкции, исполняемые процессором 820 устройства 800 для реализации описанного выше способа. Например, машиночитаемый носитель информации может представлять собой ROM, оперативную память (RAM, Random Access Memory), CD-ROM, магнитную ленту, дискету, оптическое запоминающее устройство и т.п. Процессор 820 сконфигурирован для выполнения следующих операций:
[00195] получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение заданного периода времени, определяемого первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления; определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени; и управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения.
[00196] Специалисту в этой области техники должны быть очевидны другие варианты осуществления настоящего изобретения, основанные на соображениях, изложенных в данном описании, и на практическом применении раскрытого в этом описании изобретения. Настоящая заявка предназначена для охвата любых изменений или адаптаций раскрытия настоящего изобретения, соответствующих основным его принципам, и включает общие сведения или стандартные технические средства в этой области техники, не выходящие за рамки настоящего изобретения. Это описание и примеры следует рассматривать только в качестве иллюстраций, и объем изобретения определяется приведенной ниже формулой изобретения.
[00197] Следует принимать во внимание, что раскрытие настоящего изобретения не ограничено в точности теми формулировками, которые были приведены выше и проиллюстрированы на чертежах, и различные модификации и изменения могут выполняться в объеме настоящего изобретения. Объем настоящего изобретения определяется только прилагаемой формулой изобретения.
Изобретение относится к способам управления виртуальной реальностью (VR). Технический результат заключается в повышении точности ввода данных. Такой результат достигается за счет получения данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение заданного периода времени, определяемого первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления; определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени; управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения; получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве, от первого гироскопического датчика электронного устройства после приема первой инструкции управления от манипулятора; завершение получения данных от первого гироскопического датчика и завершение получения данных датчика в течение заранее заданного периода времени после приема второй инструкции управления манипулятора. 2 н. и 10 з.п. ф-лы, 11 ил.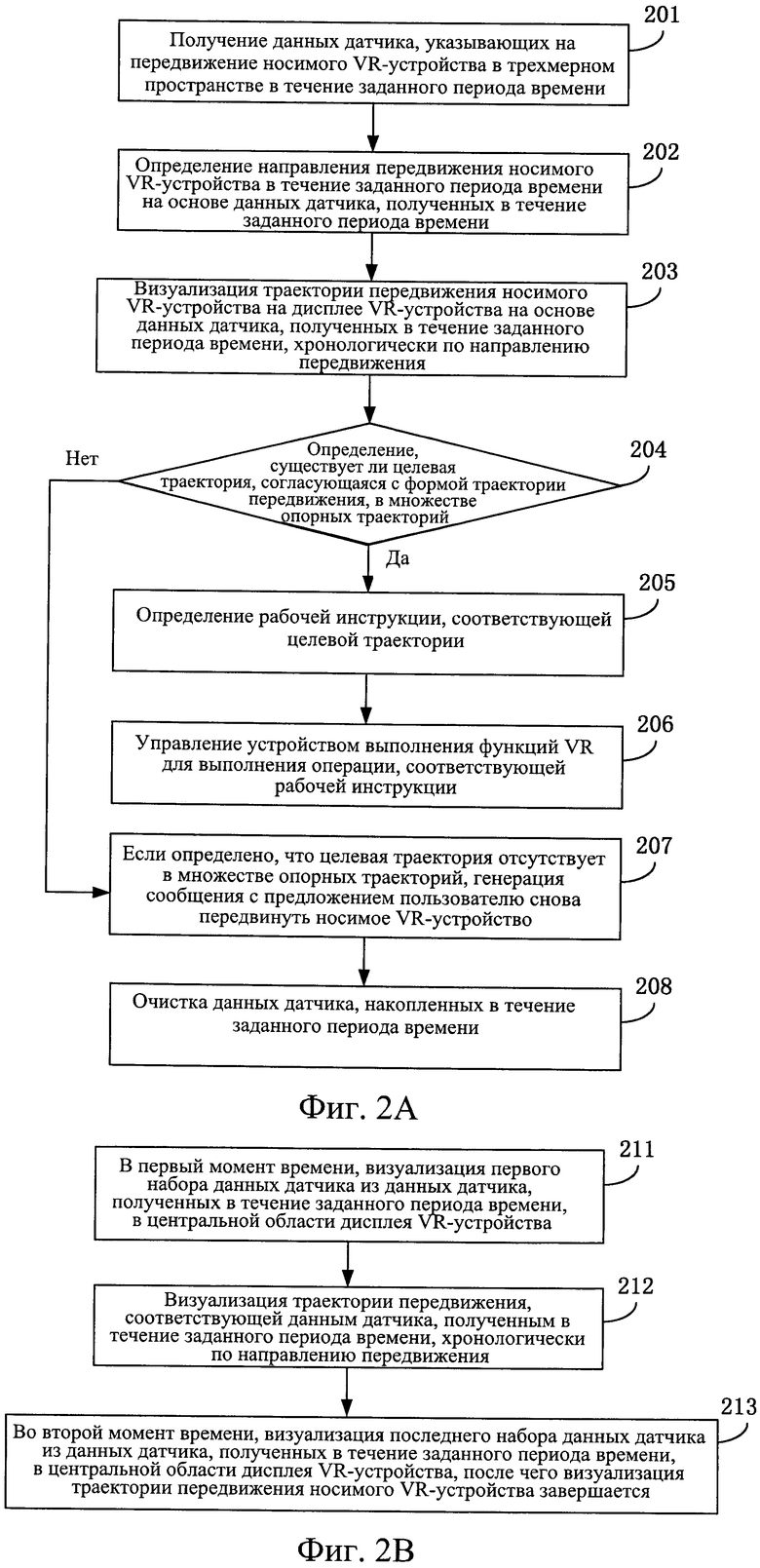
1. Способ управления виртуальной реальностью (VR), включающий:
получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение заданного периода времени, определяемого первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления (101);
определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени (102); и
управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, и для отображения на дисплее VR-устройства результатов операций, соответствующих траектории передвижения (103);
при этом указанное получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение указанного периода времени, включает:
получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве, от первого гироскопического датчика электронного устройства после приема первой инструкции управления от манипулятора, привязанного к носимому VR-устройству; и
завершение получения данных от первого гироскопического датчика и завершение получения данных датчика в течение заранее заданного периода времени после приема второй инструкции управления от упомянутого манипулятора.
2. Способ по п. 1, отличающийся тем, что указанное определение траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени, включает:
определение направления передвижения, в котором носимое VR-устройство передвигается в трехмерном пространстве, на основе данных датчика, полученных в течение заданного периода времени; и
визуализацию траектории передвижения носимого VR-устройства на дисплее VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически по направлению передвижения.
3. Способ по п. 2, отличающийся тем, что указанная визуализация траектории передвижения носимого VR-устройства на дисплее VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически по направлению передвижения, включает:
в первый момент времени визуализацию первого набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства;
визуализацию траектории передвижения, соответствующей данным датчика, полученным в течение заданного периода времени, хронологически по направлению передвижения; и
во второй момент времени визуализацию последнего набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства, после чего указанная визуализация траектории передвижения носимого VR-устройства завершается.
4. Способ по любому из пп. 1-3, отличающийся тем, что указанное управление устройством выполнения функций VR для выполнения операций, соответствующих траектории передвижения, включает:
определение, существует ли целевая траектория, согласующаяся с формой траектории передвижения, в множестве опорных траекторий, соответствующих рабочей инструкции для управления устройством выполнения функций VR;
определение рабочей инструкции, соответствующей целевой траектории; и
управление устройством выполнения функций VR для выполнения операции, соответствующей рабочей инструкции.
5. Способ по любому из пп. 1-4, также включающий:
генерацию сообщения с предложением повторно передвинуть носимое VR-устройства, если определено, что целевая траектория отсутствует в множестве опорных траекторий; и
очистку данных датчика, накопленных в течение заданного периода времени.
6. Способ по любому из пп. 1-5, отличающийся тем, что указанное получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение указанного периода времени, включает:
генерацию первой инструкции управления и определение первого момента времени, в который сгенерирована первая инструкция управления, если обнаруживается, что активизирована заранее заданная кнопка на носимом VR-устройстве;
получение данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве, от второго гироскопического датчика носимого VR-устройства в соответствии с первой инструкцией управления;
генерацию второй инструкции управления и определение второго момента времени, в который сгенерирована вторая инструкция управления, если обнаруживается, что снова активизирована заранее заданная кнопка; и
в соответствии со второй инструкцией управления завершение получения данных от второго гироскопического датчика и завершение получения данных датчика в течение заданного периода времени.
7. Устройство управления VR, содержащее:
модуль получения данных, сконфигурированный для получения данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве в течение заданного периода времени, при этом заданный период времени определяется первым моментом времени, в который принимается первая инструкция управления, и вторым моментом времени, в который принимается вторая инструкция управления;
модуль определения траектории, сконфигурированный для определения траектории передвижения носимого VR-устройства в течение заданного периода времени на основе данных датчика, полученных в течение заданного периода времени; и
модуль управления функционированием, сконфигурированный для управления устройством выполнения функций VR для выполнения операции, соответствующей траектории передвижения, и отображения на дисплее VR-устройства результатов операции, соответствующей траектории передвижения;
при этом указанный модуль получения данных содержит:
первый подмодуль получения данных, сконфигурированный для получения данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве, от первого гироскопического датчика электронного устройства после приема первой инструкции управления от манипулятора, привязанного к носимому VR-устройству;
первый подмодуль завершения, сконфигурированный для завершения получения данных от первого гироскопического датчика и завершения получения данных датчика в течение заранее заданного периода времени после приема второй инструкции управления из манипулятора.
8. Устройство по п. 7, отличающееся тем, что указанный модуль определения траектории содержит:
модуль определения направления, сконфигурированный для определения направления передвижения, в котором носимое VR-устройство передвигается в трехмерном пространстве, на основе данных датчиков, полученных в течение заданного периода времени; и
подмодуль визуализации траектории, сконфигурированный для визуализации траектории передвижения носимого VR-устройства на дисплее VR-устройства на основе данных датчика, полученных в течение заданного периода времени, хронологически в направлении передвижения.
9. Устройство по п. 8, отличающееся тем, что указанный подмодуль визуализации траектории также сконфигурирован для
визуализации в первый момент времени первого набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства;
визуализации траектории передвижения, соответствующей данным датчика, полученным в течение заданного периода времени, хронологически по направлению передвижения;
визуализации во второй момент времени последнего набора данных датчика из данных датчика, полученных в течение заданного периода времени, в центральной области дисплея VR-устройства, после чего указанная визуализация траектории передвижения носимого VR-устройства завершается.
10. Устройство по любому из пп. 7-9, отличающееся тем, что указанный модуль управления функционированием содержит:
подмодуль определения траектории, сконфигурированный для определения целевой траектории, согласующейся с формой траектории передвижения, из множества опорных траекторий, при этом каждая из множества опорных траекторий соответствует рабочей инструкции для управления устройством выполнения функций VR;
подмодуль определения рабочей инструкции, сконфигурированный для определения рабочей инструкции, соответствующей целевой траектории; и
подмодуль выполнения операции, сконфигурированный для управления устройством выполнения функций VR для выполнения операции, соответствующей рабочей инструкции.
11. Устройство по любому из пп. 7-10, также содержащее:
модуль генерации подсказки, сконфигурированный для генерации сообщения с предложением повторного передвижения носимого VR-устройства, если определяется, что целевая траектория отсутствует в множестве опорных траекторий; и
модуль очистки данных, сконфигурированный для очистки данных датчика, накопленных в течение заданного периода времени, после того как подмодуль генерации подсказки сгенерировал уведомительное сообщение.
12. Устройство по любому из пп. 7-11, отличающееся тем, что указанный модуль получения данных содержит:
подмодуль генерации первой инструкции, сконфигурированный для генерации первой инструкции управления и определения первого момента времени, в который сгенерирована первая инструкция управления, если обнаруживается, что активизирована заранее заданная кнопка на носимом VR-устройстве;
второй подмодуль получения данных, сконфигурированный для получения данных датчика, указывающих на передвижение носимого VR-устройства в трехмерном пространстве, от второго гироскопического датчика носимого VR-устройства в соответствии с первой инструкцией управления;
подмодуль генерации второй инструкции, сконфигурированный для генерации второй инструкции управления и определения второго момента времени, в который сгенерирована вторая инструкция управления, если обнаруживается, что снова активизирована заранее заданная кнопка; и
второй подмодуль завершения, сконфигурированный для завершения получения данных от второго гироскопического датчика в соответствии со второй инструкцией управления и завершения получения данных датчика в течение заданного периода времени.
| US 8947323 B1, 02.03.2015 | |||
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| RU 2004131050 A, 10.04.2006 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

