Изобретение относится к области электротехники и может быть использовано, например, в качестве шунтирующего реактора для регулирования напряжения и реактивной мощности в высоковольтных линиях электропередач.
Регулирование напряжения на линии электропередачи осуществляют путем компенсации ее реактивной мощности, для чего шунтируют линию управляемыми реакторами, используемыми в качестве регуляторов реактивного тока.
Известен управляемый электрический реактор (см. п. США №4837497 от 29.12 1987 г., опубл. 06.06.1989 г., МПК H01F 29/02, 30/10, 30/12, G05F 3/04), содержащий электронную систему управления и электромагнитную часть, включающую сетевую обмотку и управляющую обмотку, состоящие из намотанных проводами секций в каждой из фаз реактора, а также магнитопровод, выполненный в виде двух стержней, на каждом из которых размещены первичные и вторичные обмотки, причем первичные обмотки соединены параллельно, а вторичные последовательно. Электронная система управления для регулирования индуктивного сопротивления на стороне первичной обмотки содержит двунаправленный электронный ключ на тиристорах с фазовым управлением.
Известный управляемый электрический реактор обеспечивает регулирование тока только через первичную обмотку при низком уровне гармоник с порядковыми номерами 5, 7, 11, 13. При этом параметры электронного ключа должны соответствовать напряжению первичной обмотки, что при напряжении более 100 кВ приводит к необходимости использовать большое число последовательно соединенных мощных тиристоров, существенно недогруженных по току. Поэтому недостатками известного устройства является низкая надежность его работы и высокая стоимость реактора.
Наиболее близким по технической сущности и достигаемому результату к заявляемому техническому решению является управляемый электрический реактор (см. патент РФ №2518149, з. №2012139807 от 18.09.2012 г., опубл. 10.06.2014 г., МПК H02J 3/00), содержащий электронную систему управления и электромагнитную часть, включающую в каждой из фаз реактора сетевую и управляющую обмотки, состоящие из намотанных проводами секций, а также стержневой магнитопровод, стержни которого выполнены из элементов, расположенных последовательно по высоте и разделенных на две параллельные части - внутреннюю и внешнюю, при этом во внешней части каждого элемента стержня выполнен немагнитный зазор, витки проводов секций сетевой обмотки охватывают сечение стержня целиком, а витки проводов секций управляющей обмотки охватывают сечение стержня частично.
В известном управляемом реакторе необходимо, чтобы суммарная установленная мощность электронных ключей управления равнялась номинальной мощности трехфазного реактора. Для высоковольтных линий электропередач (110 кВ и выше) на практике мощность устанавливаемых реакторов меняется обычно от 10000 кВА до 200000 кВА. Это приводит к необходимости использования большого количества мощных высоковольтных электронных ключей управления и создания специальных дорогостоящих конструкций для их охлаждения и изоляции. Таким образом, недостатками известного устройства является низкая надежность его работы и высокая стоимость управляемого электрического реактора.
В основу изобретения поставлена задача усовершенствования управляемого электрического реактора, в котором путем введения новых элементов, новых связей между ними и нового выполнения элементов обеспечивается возможность управляемого низковольтного подмагничивания локальных элементов стержня магнитопровода, что снижает уровень установленной мощности электронной системы управления реактором при сохранении его функциональных возможностей, за счет чего повышается надежность работы устройства с одновременным снижением стоимости реактора.
Поставленная задача решается тем, что в известном управляемом электрическом реакторе, содержащем электронную систему управления и электромагнитную часть, включающую в каждой из фаз реактора сетевую и управляющую обмотки, состоящие из намотанных проводами секций, а также стержневой магнитопровод, стержни которого выполнены из элементов, расположенных последовательно по высоте и разделенных на две параллельные части - внутреннюю и внешнюю, при этом во внешней части каждого элемента стержня выполнен немагнитный зазор, витки проводов секций сетевой обмотки охватывают сечение стержня целиком, а витки проводов секций управляющей обмотки охватывают сечение стержня частично, новым является то, что число секций управляющей обмотки на стержне парное, концы расположенных рядом секций в управляющей обмотке соединены параллельно, а направление намотки в них - встречное, параллельные части, по крайней мере, одного элемента стержня реактора выполнены в виде дисков из радиально шихтованных по периметру пластин электротехнической стали, отделенных от других элементов стержня немагнитными зазорами, как во внешней, так и во внутренней частях, при этом секции управляющей обмотки расположены внутри внешнего диска, а секции сетевой обмотки расположены снаружи внешнего диска, электронная система управления выполнена в виде, по крайней мере, одного управляемого источника постоянного напряжения, выходные клеммы которого соединены с концами, по крайней мере, одной пары секций управляющей обмотки.
Новым является также то, что концы управляющих обмоток разных фаз соединены по схеме «разомкнутый треугольник», причем разомкнутые концы соединены с управляемым источником постоянного напряжения.
Новым является также то, что на стержнях магнитопровода установлены дополнительные компенсационные обмотки, концы разных фаз которых соединены по схеме «треугольник».
Новым является также то, что управляемый источник постоянного напряжения содержит последовательно соединенные трансформатор питания полупроводникового преобразователя, полупроводниковый преобразователь с блоком защиты от перенапряжений на входе и автономную систему автоматического управления.
Новым является также то, что компенсационные или сетевые обмотки каждой фазы содержат дополнительные отводы, соединенные с трансформатором питания управляемого источника постоянного напряжения.
Причинно-следственная связь между совокупностью существенных признаков устройства и достигаемым техническим результатом заключается в том, что в управляемом электрическом реакторе, который заявляется,
- число секций управляющей обмотки на стержне парное, концы расположенных рядом секций в управляющей обмотке соединены параллельно, а направление намотки в них - встречное,
- параллельные части, по крайней мере, одного элемента стержня реактора выполнены в виде дисков из радиально шихтованных по периметру пластин электротехнической стали, отделенных от других элементов стержня немагнитными зазорами, как во внешней, так и во внутренней частях, при этом секции управляющей обмотки расположены внутри внешнего диска, а секции сетевой обмотки расположены снаружи внешнего диска,
- электронная система управления выполнена в виде, по крайней мере, одного управляемого источника постоянного напряжения, выходные клеммы которого соединены с концами, по крайней мере, одной пары секций управляющей обмотки,
что в совокупности с известными признаками обеспечивает возможность управляемого низковольтного подмагничивания локальных элементов стержня магнитопровода, что снижает уровень установленной мощности электронной системы управления реактора при сохранении его функциональных возможностей, за счет чего достигается повышение надежности работы устройства с одновременным снижением стоимости реактора.
Объясняется это следующим.
Выполнение управляющей обмотки с четным числом секций на стержне, где концы расположенных рядом секций в управляющей обмотке соединены параллельно, а направление намотки в них - встречное, обеспечивает компенсацию наведенного напряжения от магнитного поля сетевой обмотки и, следовательно, отсутствие в секциях управляющей обмотки переменного тока, наведенного сетевой обмоткой. Это приводит к уменьшению потерь в управляющей обмотке и уменьшению искажений магнитного поля, создаваемого этой обмоткой в элементах стержня магнитной системы.
То, что параллельные части, по крайней мере, одного элемента стержня реактора выполнены в виде дисков из радиально шихтованных по периметру пластин электротехнической стали, отделенных от других элементов стержня немагнитными зазорами, как во внешней, так и во внутренней частях, при этом секции управляющей обмотки расположены внутри внешнего диска, а секции сетевой обмотки расположены снаружи внешнего диска, обеспечивает технологичность изготовления. Диски могут быть изготовлены отдельно, например, как в обычных шунтирующих реакторах с использованием автоматического технологического оборудования. Такие локальные элементы стержня с сосредоточенными в них секциями управляющей обмотки позволяют проводить подмагничивание этих элементов отдельно, независимо от других элементов стержня. Локальное подмагничивания требует меньших затрат энергии и позволяет выполнить управляющую обмотку на большие токи (до 2000 А), но низкое напряжение (до 500 В). Низковольтная управляющая обмотка, размещенная между двумя параллельными вертикальными частями стержня, не требует сложной изоляции и больших изоляционных расстояний, причем сетевая обмотка остается высоковольтной (от 10 кВ до 1200 кВ). Конструкция управляемого реактора выходит компактной, снижается расход материалов, а также снижаются потери.
То, что концы расположенных рядом секций в управляющей обмотке соединены параллельно, а направление намотки в них - встречное, обеспечивает то, что переменные токи, наведенные в них переменным магнитным полем сетевой обмотки, имеют встречное направление, а постоянные токи от управляемого источника постоянного напряжения являются однонаправленными.
То, что электронная система управления выполнена в виде, по крайней мере, одного управляемого источника постоянного напряжения, выходные клеммы которого соединены с концами, по крайней мере, одной пары секций управляющей обмотки, позволяет отказаться от использования ненадежных электронных компонентов, рассчитанных на высокое напряжение и большую мощность (до 100% мощности реактора). При этом обеспечивается управление током в секциях управляющей обмотки при низком напряжении (до 500 В) и мощности (5-10% мощности реактора). Такая система управления надежнее, компактнее и имеет меньшие расходы, как по стоимости, так и по трудоемкости изготовления.
Таким образом, обеспечивается повышение надежности работы устройства за счет обеспечения возможности управляемого низковольтного подмагничивания локальных элементов стержня магнитопровода, что снижает уровень установленной мощности электронной системы управления реактора при сохранении его функциональных возможностей, с одновременным снижением стоимости реактора.
Признаки, приведенные в развивающих и дополняющих пунктах, также позволяют повысить надежность работы устройства с одновременным снижением стоимости электрического реактора.
Развитие изобретения предусматривает оптимизацию заявленного решения в отдельных, часто встречающихся, случаях.
То, что концы управляющих обмоток разных фаз соединены по схеме «разомкнутый треугольник», причем разомкнутые концы соединены с управляемым источником постоянного напряжения, позволяет применить одну систему управления одновременно для регулирования токов в управляющих обмотках разных фаз. Обеспечивается возможность не только заменить три управляющие системы одной, но и отказаться от независимого фазного управления, не всегда необходимого.
То, что на стержнях магнитопровода установлены дополнительные компенсационные обмотки, концы разных фаз которых соединены по схеме «треугольник», обеспечивает создание проводящего контура, в котором циркулирует ток и его магнитное поле компенсирует наличие токов высших гармоник, кратных трем, в токе фаз сетевых обмоток. Нелинейные искажения от токов высших гармоник не попадают в сеть, чем улучшается качество электроэнергии.
То, что управляемый источник постоянного напряжения содержит последовательно соединенные трансформатор питания полупроводникового преобразователя, полупроводниковый преобразователь с блоком защиты от перенапряжений на входе и автономную систему автоматического управления, позволяет при оптимальных затратах обеспечить все необходимые для работы функции управляемого реактора с учетом требований по низкому напряжению, большому току, плавном и быстрому автоматическому регулированию тока в управляющей обмотке по заданным алгоритмам управления. В систему автоматического управления поступают сигналы текущих значений напряжения сети в точке подключения реактора и потребляемого тока сетевой обмотки. В зависимости от значений этих сигналов и заданных допустимых значений для обеспечения стабилизации напряжения сети в точке подключения реактора или потребляемой мощности сетевой обмотки управляемый источник постоянного напряжения меняет значение напряжения, питающего управляющую обмотку, и регулирует потребляемый реактивный ток реактора. Это обеспечивает стабилизацию напряжения сети в точке подсоединения или потребляемой мощности сетевой обмотки.
То, что компенсационные или сетевые обмотки каждой фазы содержат дополнительные отводы, соединенные с трансформатором питания управляемого источника постоянного напряжения, позволяет выполнить установку управляемого реактора без дополнительных затрат на прокладку кабелей для использования питания собственных нужд станции.
Таким образом, повышается надежность работы устройства за счет обеспечения возможности управляемого низковольтного подмагничивания локальных элементов стержня магнитопровода, что снижает уровень установленной мощности электронной системы управления реактора при сохранении его функциональных возможностей, с одновременным снижением стоимости реактора.
Для пояснения сущности заявляемого технического решения приведены следующие схемы и чертежи.
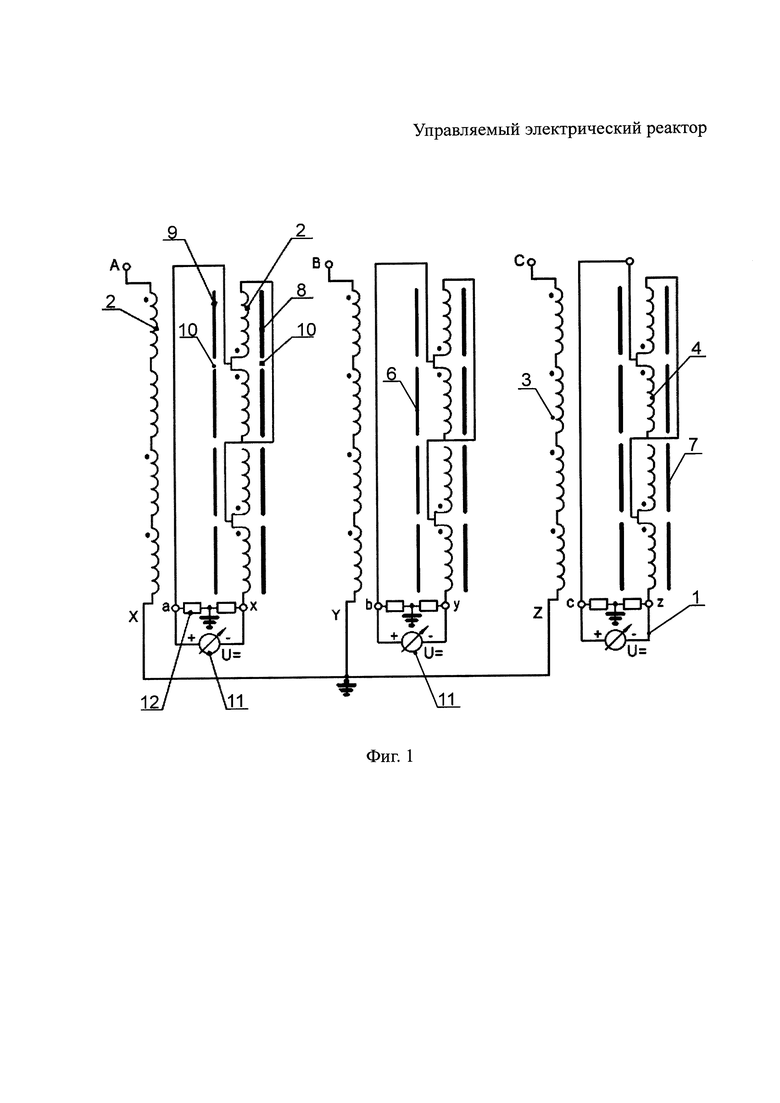
На фиг. 1 показан пример реактора с независимой регулировкой реактивного тока фаз.
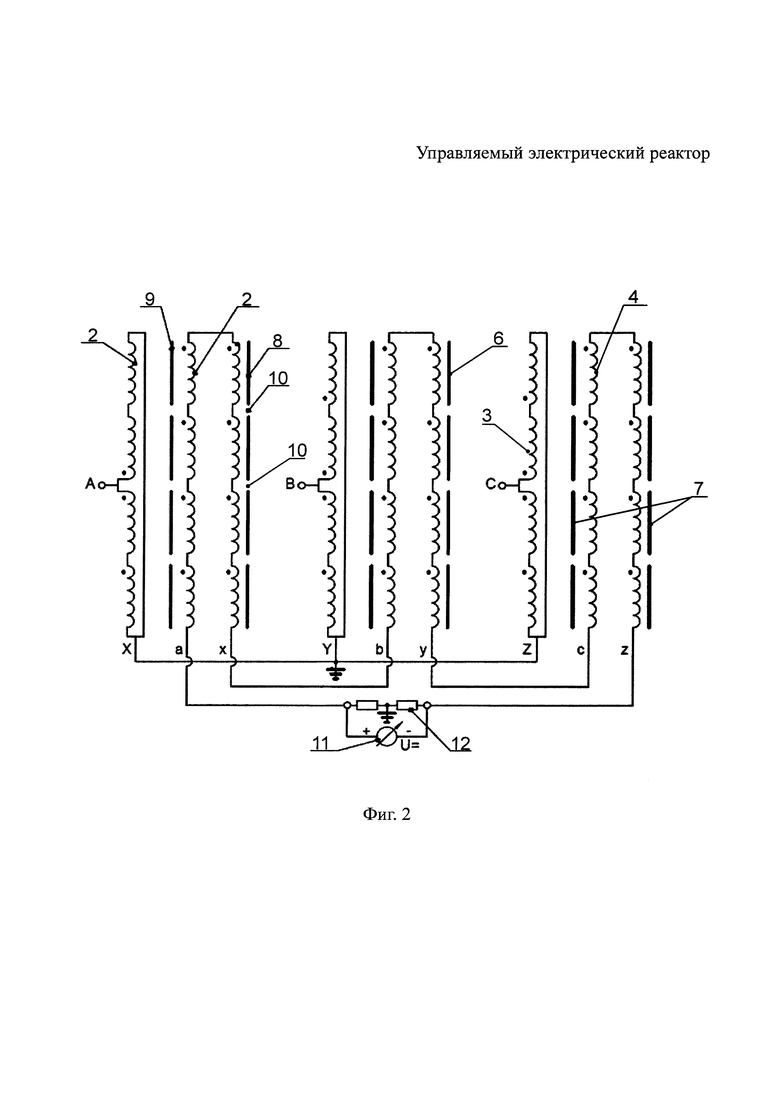
На фиг. 2 показан пример реактора с синхронным регулированием реактивного тока фаз.
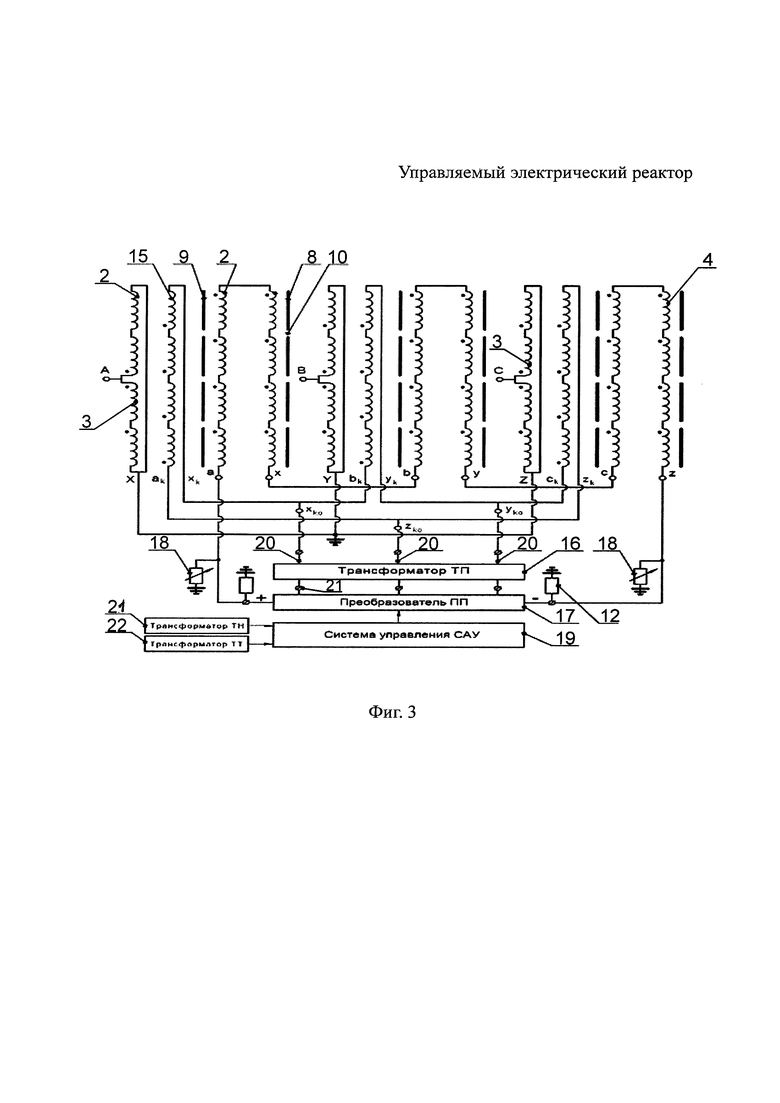
На фиг. 3 показан пример реактора с синхронным регулированием реактивного тока фаз, содержащего дополнительную компенсационную обмотку.
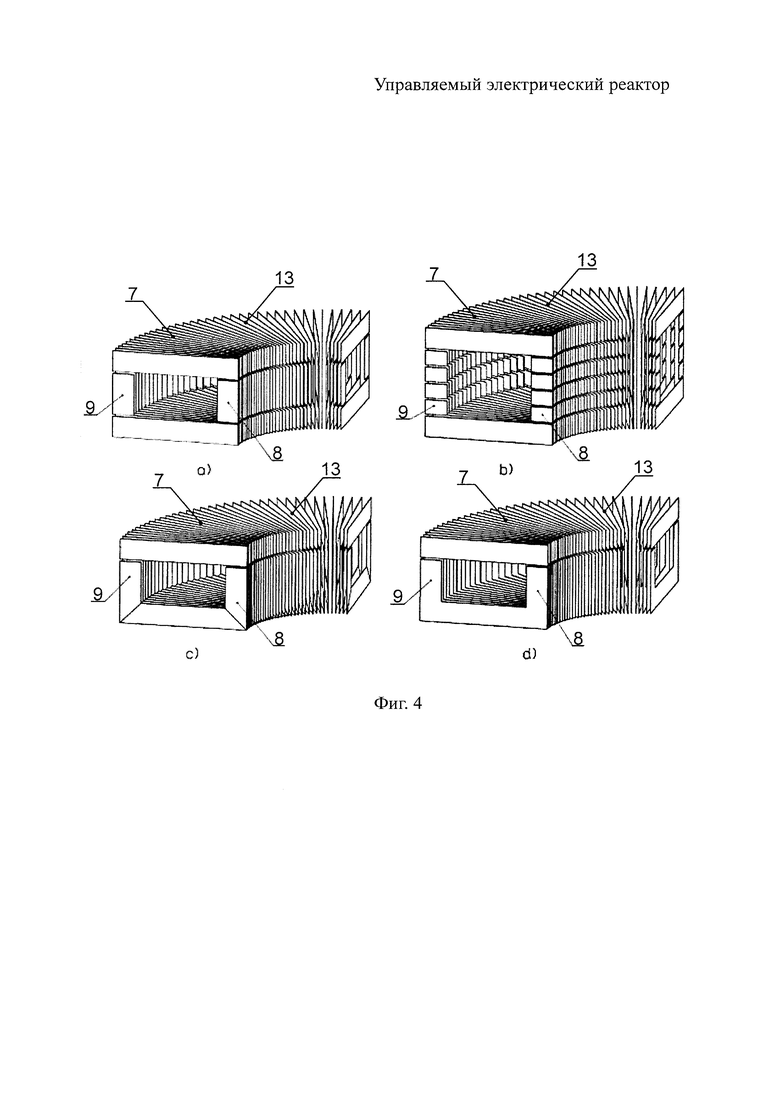
На фиг. 4 показаны примеры шихтовки дисков элементов стержня.
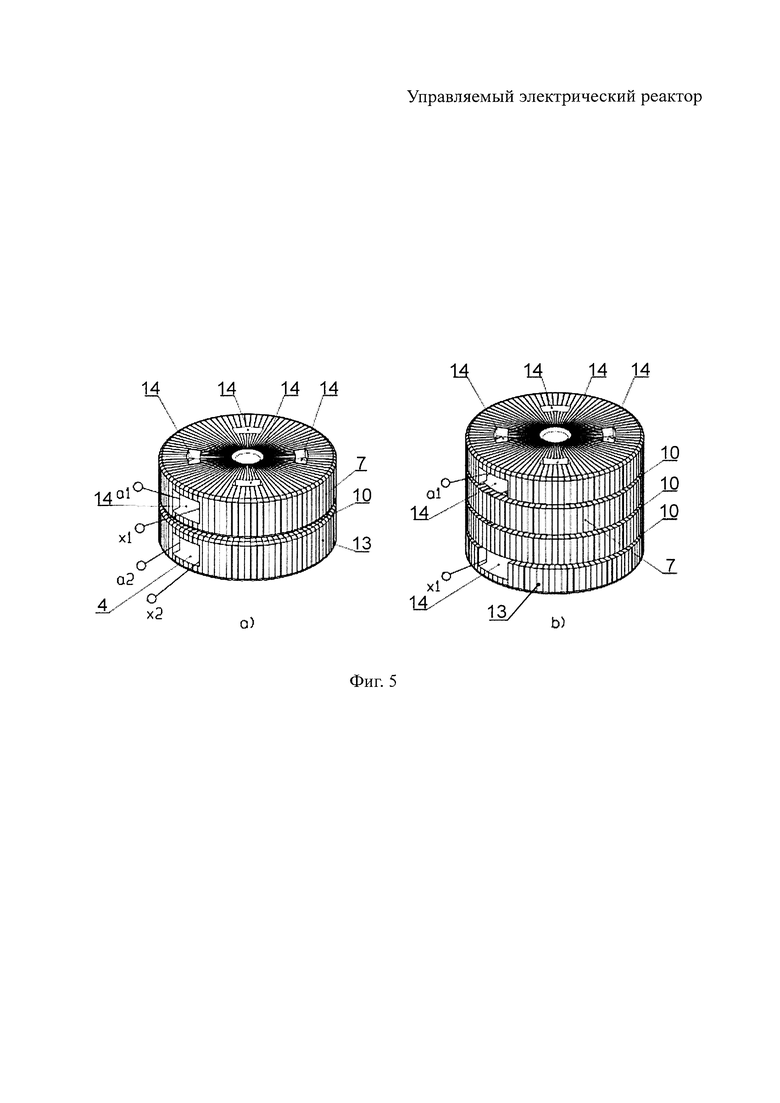
На фиг. 5 показаны примеры общего вида элементов стержня (дисков) с каналами.
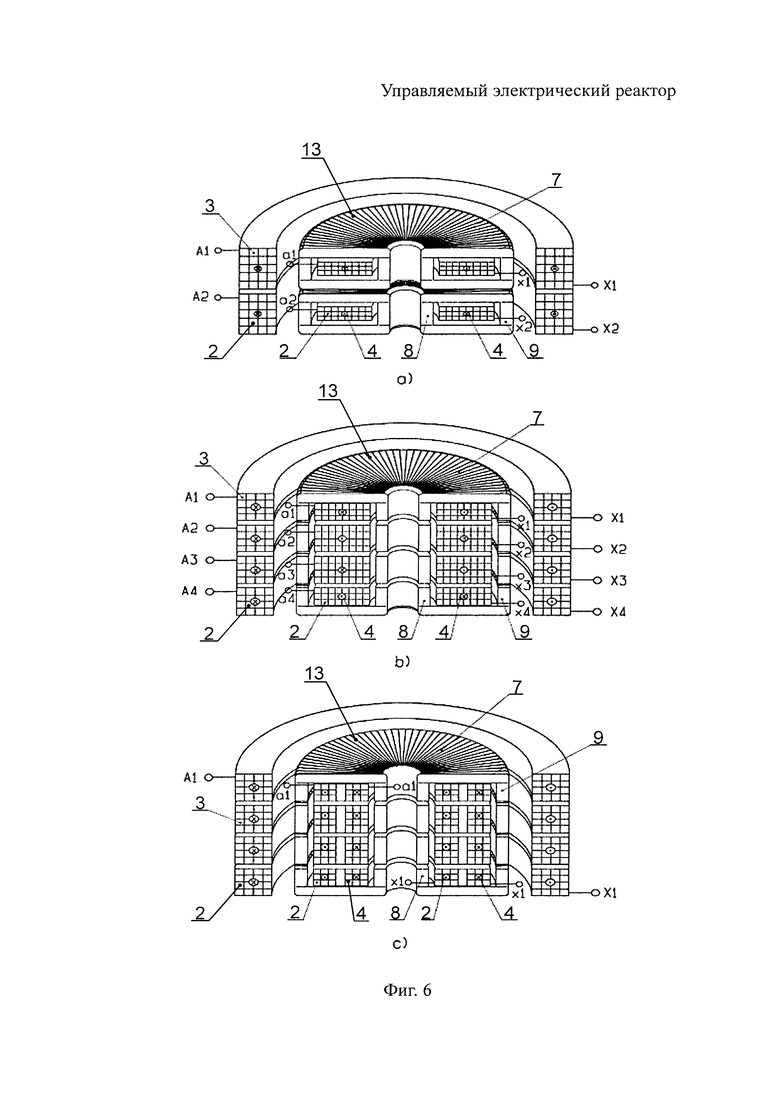
На фиг. 6 показаны примеры расположения элементов стержня, секций сетевой обмотки и управляющей обмотки в разрезе.
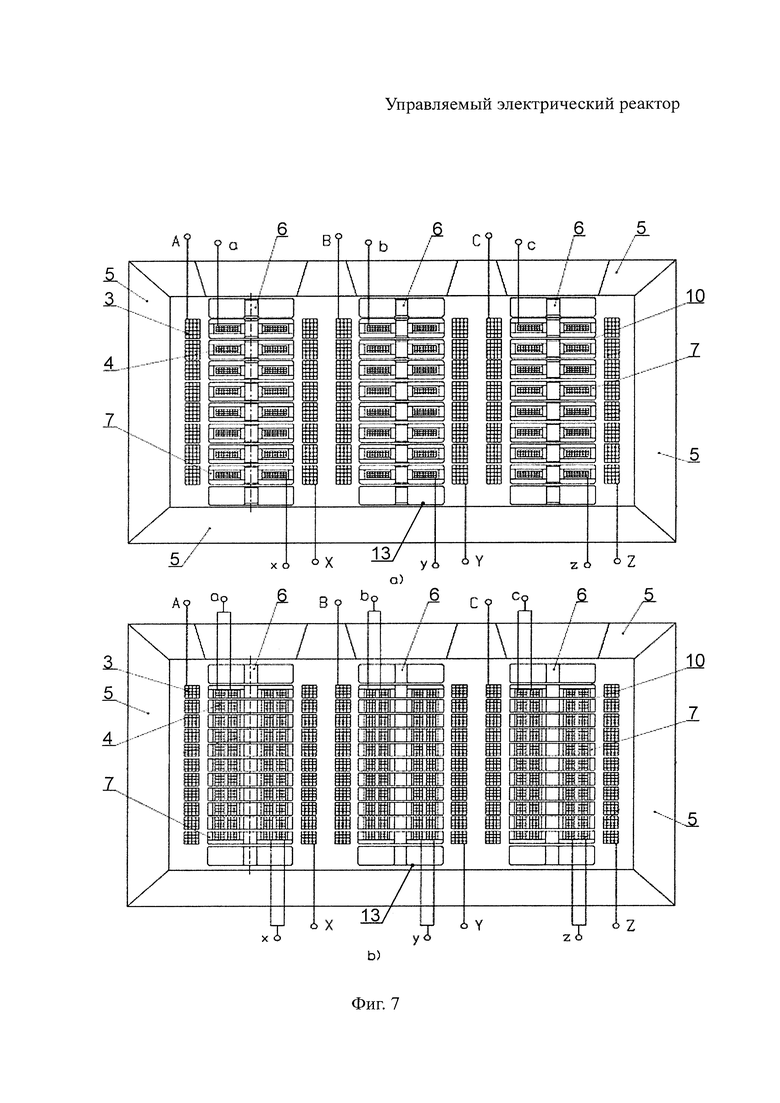
На фиг. 7 показаны примеры компоновки активной части управляемого реактора.
Управляемый электрический реактор, который заявляется, содержит электронную систему 1 управления и электромагнитную часть, которая включает намотанные проводами секции 2 сетевой обмотки 3 и управляющей обмотки 4 в каждой из фаз реактора, а также стержневой магнитопровод 5, стержни 6 которого выполнены из элементов 7, расположенных последовательно по высоте и разделенных на две параллельные части 8, 9, соответственно, внутреннюю и внешнюю. При этом во внутренней части 8 и наружной части 9 элемента 7 стержня 6 выполнен немагнитный зазор 10, а витки проводов секций 2 сетевой обмотки 3 размещены так, что они охватывают сечение стержня 6 целиком, а витки проводов секций 2 управляющей обмотки 4 охватывают сечение стержня 6 частично.
Электронная система 1 управления содержит, по крайней мере, один управляемый источник 11 постоянного напряжения, выходные клеммы которого соединены с концами не менее одной пары секций 2 управляющей обмотки 4 в каждой из фаз реактора, и заземлены через дополнительно установленные резисторы 12.
Число секций 2 управляющей обмотки 4 на стержне 6 парное, а концы расположенных рядом секций 2 в управляющей обмотке 4 соединены встречно параллельно, то есть концы расположенных рядом секций в управляющей обмотке 4 соединены параллельно, а направление намотки в них - встречное. При таком соединении переменные токи, наведенные в расположенных рядом секциях 2 управляющей обмотки 4 переменным магнитным полем сетевой обмотки 3, имеют встречное направление, а постоянные токи от управляемого источника 11 постоянного напряжения являются одинаково направленными.
По крайней мере, один элемент 7 стержня 6 реактора выполнен в виде не менее одного диска 13 из радиально шихтованных по периметру пластин электротехнической стали, при этом секции 2 управляющей обмотки 4 расположены внутри элемента 7 стержня 6, а секции сетевой обмотки 3 - снаружи элемента 7 стержня 6. Элемент 7 стержня 6, выполненный в виде диска 13, отделен от других элементов стержня 6 немагнитными зазорами 10, как во внешней части 9, так и во внутренней части 8, и имеет, по крайней мере, один канал 14 от внутренней части 8 диска 13 до внешней части 9.
Концы управляющих обмоток 4 разных фаз могут быть соединены по схеме «разомкнутый треугольник», причем разомкнутые концы соединены с управляемым источником 11 постоянного напряжения.
На стержнях 6 магнитопровода 5 могут быть установлены дополнительные компенсационные обмотки 15, концы разных фаз которых соединены по схеме «треугольник».
Управляемый источник 11 постоянного напряжения может содержать последовательно соединенные трансформатор 16 питания полупроводникового преобразователя 17, полупроводниковый преобразователь 17 с блоком 18 защиты от перенапряжений на входе и автономную систему 19 автоматического управления.
Компенсационные обмотки 15 или сетевые обмотки 3 каждой фазы могут содержать дополнительные отводы 20, соединенные с трансформатором питания управляемого источника 11 постоянного напряжения, расположенные внутри электромагнитной системы реактора или на ее внешней поверхности.
Фиг. 1 иллюстрирует пример схемы трехфазного (фазы А, В, С) реактора по заявленному техническому решению, содержащего на стержне 6 магнитопровода 5 каждой фазы сетевую обмотку 3 и управляющую обмотку 4. Стержень 6 каждой фазы состоит из четырех последовательно расположенных по вертикали элементов 7, разделенных на две параллельные части - внутреннюю часть 8 и внешнюю часть 9. Элементы 7 стержня 6 отделены друг от друга немагнитными зазорами 10 во внутренней и внешней частях 8, 9, соответственно. Сетевая обмотка 3 состоит из четырех секций 2, соединенных последовательно сверху вниз. Начало направлений намотки витков секций 2 показано на фиг. 1 в виде точек. Секции 2 сетевой обмотки 3 охватывают внутренние и внешние части 8, 9 элементов 7 стержня 6. Концы (X, Y, Z) сетевой обмотки 3 разных фаз соединены по схеме «звезда» и заземлены в общей точке. Управляющая обмотка 4 в каждой фазе состоит из четырех секций 2, которые попарно (первая со второй и третья с четвертой) соединены встречно параллельно. Между собой эти пары соединены последовательно. Секции 2 сетевой обмотки 3 охватывают только внутренние части 8 элементов 7 стержня 6. К началам (а, в, с) и концам (x, y, z) управляющих обмоток 4 разных фаз присоединены три управляемых источника 11 постоянного напряжения. На фиг. 1 клеммы «+» и «-» управляемых источников 11 заземлены через резисторы 12. Такое подключение обеспечивает независимое пофазное регулирование тока реактора.
Фиг. 2 иллюстрирует второй пример схемы трехфазного (фазы А, В, С) реактора по заявленному техническому решению, содержащего на стержне 6 магнитопровода 5 каждой фазы сетевую обмотку 3 и управляющую обмотку 4. Стержень 6 каждой фазы состоит из четырех последовательно расположенных по вертикали элементов 7, разделенных на внутреннюю и внешнюю параллельные части 8, 9, соответственно. Элементы 7 стержня 6 отделены друг от друга немагнитными зазорами 10 во внешней и внутренней частях 8, 9, соответственно. Сетевая обмотка 3 состоит из четырех секций 2, попарно соединенных последовательно сверху вниз (первая секция 2 соединена последовательно со второй, а третья секция 2-е четвертой). Между собой пары секций 2 соединены параллельно. Начало направлений намотки витков секций 2 показано на фиг. 2 в виде точек. Секции 2 сетевой обмотки 3 охватывают внутренние и внешние части 8, 9 элементов 7 стержня 6. Концы (X, Y, Z) сетевой обмотки 3 разных фаз соединены по схеме «звезда» и заземлены в общей точке. Управляющая обмотка 4 в каждой фазе состоит из восьми секций 2, которые состоят из двух групп, соединенных встречно параллельно. В первую группу входят четыре секции 2, расположенные на внутренних частях 8 элементов 7 стержня 6, а во вторую группу входят четыре секции 2, охватывающие секции 2 первой группы. Секции 2 управляющей обмотки 4 охватывают только внутренние части 8 элементов 7 стержня 6. Начало (а, в, с) и концы (x, y, z) управляющих обмоток 4 разных фаз соединены по схеме «открытый треугольник», в разрыв которого присоединены выходы «+» и «-» одного управляемого источника 11, заземленные через резисторы 12. Такое подключение обеспечивает синхронное регулирование тока реактора в каждой из фаз.
Фиг. 3 иллюстрирует третий пример схемы трехфазного реактора по заявленному техническому решению, содержащего все элементы магнитопровода 5, сетевой обмотки 3 и управляющей обмотки 4, аналогично показанному на фиг. 2, но содержащего на стержне 6 магнитопровода 5 каждой фазы дополнительную компенсационную обмотку 15. На фиг. 3 компенсационная обмотка 15 состоит из четырех последовательно соединенных секций, охватывающих элементы 7 магнитопровода 5, и секции 2 управляющей обмотки 4. Начало (аk, вk, ck) и концы (xk, yk, zk) компенсационных обмоток 15 разных фаз соединены по схеме «треугольник».
Вершины «треугольника» компенсационной обмотки 15, как показано на фиг. 3, с помощью дополнительных отводов 20 присоединены к трансформатору 16 питания полупроводникового преобразователя 17, который преобразует переменный ток компенсационной обмотки 15 в ток управляющей обмотки 4. Управление значением тока обмотки 4 осуществляется по сигналам автономной системы 19 автоматического управления. Для защиты от перенапряжений полупроводникового преобразователя 17 его вход соединен с блоком 18 защиты от перенапряжений.
Такое исполнение управляемого источника 11 постоянного напряжения обеспечивает автономность эксплуатации реактора без использования сети собственных нужд подстанции.
В качестве полупроводникового преобразователя 17 можно использовать тиристорный мост, выполненный на базе регулируемых фазой угла включения управляемых тиристоров. При этом на тиристорах выбирается ток до 2000-3000 А. При необходимой мощности реакторов, устанавливаемых в высоковольтных сетях (110 кВ и выше), от 10000 кВА до 200000 кВА, в заявленном устройстве установленная мощность управляемого источника 11 постоянного напряжения составит от 5% до 10% установленной мощности реактора, а не 100%, как в прототипе.
В качестве блока 18 защиты от перенапряжений можно использовать ограничители перенапряжений, выпускаемые промышленностью. За счет схемы соединения секций 2 управляющей обмотки 4, которая использована в заявляемом устройстве, напряжение на концах управляющей обмотки 4, наведенное переменным магнитным потоком, низкое. Поэтому можно использовать ограничители перенапряжений на напряжение до 1 кВ - 5 кВ.
В качестве автономной системы 19 автоматического управления можно использовать микропроцессорное устройство, соединенное с полупроводниковым преобразователем 17 и измерительными трансформаторами 21 напряжения и трансформаторами 22 тока, которые измеряют напряжение в точке подключения реактора и ток сетевой обмотки 3 каждой фазы реактора. Соединение может осуществляться с помощью медных кабелей (при передаче аналоговых сигналов) или с помощью оптоволоконных кабелей и беспроводной связи (при передаче цифровых сигналов). Программное обеспечение автономной системы 19 автоматического управления, содержащее, например, компьютер, контроллеры, микропроцессоры, обеспечивает в режиме реального времени анализ фактически измеренных значений напряжения в точке подключения реактора и тока сетевой обмотки 3. При этом выполняется оценка отклонения этих данных от установленных заранее допустимых значений. Вырабатываются сигналы, регулирующие фазы включения управляемых тиристоров полупроводникового преобразователя 17. Аналогичные автономные системы 19 автоматического управления изготавливаются в промышленности и используются в энергетике.
Фиг. 4 иллюстрирует различные примеры выполнения элементов 7 магнитопровода 5 в виде радиальных шихтованных дисков 13. На фиг. 4а показан элемент, собранный и склеенный из четырех отдельных частей, состоящих из радиально шихтованных пластин: внутренней вертикальной части 8, внешней вертикальной части 9, нижней горизонтальной части и верхней горизонтальной части. При такой сборке получается диск, имеющий внутри полость. В эту полость, при сборке, перед установкой и склеиванием верхней горизонтальной части диска 13 устанавливают секции 2 управляющей обмотки 4. На фиг. 4b показан элемент, у которого, в отличие от элемента, показанного на фиг. 4а, есть несколько вертикальных частей, отделенных друг от друга немагнитными зазорами 10. На фиг. 4b показан элемент, у которого четыре внутренние и четыре внешние вертикальные части. В полость, образовавшуюся между вертикальными и горизонтальными частями, при сборке элемента также устанавливаются секции 2 управляющей обмотки 4.
На фиг. 4с и фиг. 4d показаны элементы магнитопровода 5, аналогичные элементам магнитопровода 5, показанным на фиг. 4а и фиг. 4b, но собранные не из изготовленных отдельно частей, а из шихтованных пластин в каждом радиальном сечении. На фиг. 4с показано выполнение вертикальных и нижней горизонтальной частей в виде пластин, шихтованных в радиальных сечениях диска по схеме с косым стыком.
На фиг. 4d показано выполнение вертикальных и нижней горизонтальной частей диска 13 в виде целостных пластин п-образной формы.
На фиг. 5 показан общий вид элементов магнитопровода 5 в виде дисков 13 в сборе. На фиг. 5а показано выполнение двух отдельных дисков 13, каждый из которых может быть выполнен по схеме шихтовки, показанной на фиг. 4а, или фиг. 4с, или фиг. 4d. Диски 13 разделены немагнитным зазором 10. На фиг. 5b показано выполнение составного диска 13 с четырьмя внешними и четырьмя внутренними вертикальными частями 8, 9, который выполнен по схеме, приведенной на фиг. 4b. В дисках 13 могут быть выполнены каналы 14 для прохода масла, охлаждающего секции 2 управляющей обмотки 4, расположенные внутри элементов 7 стержня 6 и, при необходимости, для вывода концов секций 2 управляющей обмотки 4. Каналы 14 могут располагаться на вертикальных или горизонтальных частях дисков 13. Эти локальные каналы 14 формируют при изготовлении соответствующих частей диска 13 за счет уменьшения размеров шихтуемых пластин или их отдаления в отдельных секторах частей диска 13. Начала намотки витков секций 2 управляющей обмотки 4, расположенные внутри дисков 13 стержня 6, на фиг. 5а обозначены, как a1 и а2, концы намотки секций 2 обозначены как x1 и х2 соответственно, для первой и второй секций 2. Секции 2 управляющей обмотки 4, как показано на фиг. 5b, соединены между собою внутри элемента 7 стержня 6. Наружу, через каналы 14, выведены начала (a1) и концы (x1) витков группы секций 2 управляющей обмотки 4.
Подробнее расположение частей дисков 13 элементов 7 стержня 6, секций 2 сетевой обмотки 3 и управляющей обмотки 4 иллюстрирует фиг. 6, где показан вид элементов 7 магнитопровода 5 в виде дисков 13 в разрезе. На фиг. 6 показаны элементы 7 стержней 6 магнитопровода 5 в виде дисков 13, секции 2 управляющей обмотки 4, расположенные внутри этих дисков 13, секции 2 сетевой обмотки 3, расположенные снаружи этих дисков 13. Начала секций 2 по направлению намотки на фиг. 6 обозначены: A1, А2, A3, А4 для сетевой обмотки 3 и a1, а2, а3, а4 для управляющей обмотки 4. Концы секций 2 по направлению намотки на фиг. 6 обозначены: X1, Х2, Х3, Х4 для сетевой обмотки 3 и x1, х2, x3, х4 для управляющей обмотки 4. Различные направления переменного тока в секциях 2 обмоток отмечены кругами. На фиг. 6а показано выполнение устройства, содержащего две секции 2 управляющей обмотки 4, каждая из которых расположена внутри отдельных дисков 13 и две секции 2 сетевой обмотки 3.
На фиг. 6b показано выполнение устройства, содержащего четыре секции 2 управляющей обмотки 4, которые расположены внутри элемента, собранного из четырех вертикальных внутренних дисков 13, четырех вертикальных внешних дисков 13, верхнего и нижнего горизонтальных дисков 13. Начала a1, а2, а3, а4 управляющей обмотки 4 и концы x1, х2, x3, х4 управляющей обмотки 4 в таком исполнении должны быть соединены между собой попарно встречно параллельно, как было показано на фиг. 1. В этом случае ток в этих секциях 2, наведенный переменным магнитным полем от тока сетевой обмотки 3, будет иметь различное направление в рядом расположенных по высоте секциях 2 управляющей обмотки 4. При этом начала A1, А2, A3, А4 и концы X1, Х2, X3, Х4 секций 2 сетевой обмотки 3 можно соединить, как последовательно так и параллельно.
На фиг. 6с представлено устройство, отличающееся от устройства, показанного на фиг. 6b, наличием восьми секций 2 управляющей обмотки 4, разделенных на две группы и расположенных концентрично по четыре секции 2 в каждой группе. Секции 2 внутри группы соединены последовательно, а между группами - встречно параллельно, как показано на схеме фиг. 2. При этом направления тока, наведенного переменным магнитным полем сетевой обмотки 3, будут иметь различное направление в рядом расположенных в радиальном направлении секциях 2 управляющей обмотки 4.
Фиг. 7 иллюстрирует различное исполнение компоновки активной части реактора по заявляемому техническому решению. На фиг. 7 показана схема магнитопровода 5 трехфазного реактора, содержащего три стержня 6, два вертикальных боковых ярма и горизонтальные ярма. Ярма собраны из пластин электротехнической стали по одной из известных схем шихтовки, например, по схеме с косым стыком пластин. Каждый стержень 6 состоит из нескольких последовательно расположенных по высоте элементов 7. Крайние элементы 7 выполнены в виде радиальных шихтованных дисков 13, обычных для конструкций высоковольтных реакторов, а другие - в виде радиальных шихтованных дисков 13, содержащих внутри секции 2 управляющей обмотки 4 (конструкция диска фиг. 4, фиг. 5). Секции 2 управляющей обмотки 4 охватывают только внутренние вертикальные части дисков 13, а секции 2 сетевой обмотки 3 охватывают как внутренние, так и внешние части. Элементы 7 стержня 6 отделены немагнитными зазорами 10, которые могут выполняться известными способами, например, с помощью керамических дистанционных прокладок. Секции 2 сетевой обмотки 3, показанные на фиг. 7, соединенные последовательно. Сетевая обмотка 3 имеет ввод с конца Начало намотки сетевых обмоток 3 разных фаз обозначены А, В, С, а концы X, У, Z. Концы могут быть соединены, например, по схеме «звезда», как показано на фиг. 1, фиг. 2, фиг. 3. Секции 2 управляющей обмотки 4, показанной на фиг. 7, соединены попарно по высоте встречно параллельно, аналогично показанному на фиг. 6а или фиг. 6b. Секции 2 управляющей обмотки 4, показанные на фиг. 7b, соединены по группам встречно параллельно, аналогично фиг. 6с.
Концы управляющих обмоток 4 разных фаз обозначены на фиг. 7 строчными буквами а, в, с и x, y, z. Эти концы подключаются к клеммам «+» и «-» управляемого источника 11 постоянного напряжения, например, по схемам фиг. 1, фиг. 2, фиг. 3.
Управляемый электрический реактор работает следующим образом.
Сетевые обмотки 3 (см. фиг. 7) каждой фазы реактора подключают к соответствующим фазам электрической сети. Концы этих обмоток, как правило, соединяют по схеме «звезда» и заземляют (фиг. 1, фиг. 2, фиг. 3). В витках секций 2 сетевой обмотки 3 после такого соединения протекает переменный ток. Концы секций 2 управляющей обмотки 4 «а, в, с, x, y, z» подключают к управляемому источнику 11 постоянного напряжения (фиг. 1, фиг. 2). Затем их заземляют с помощью резисторов 12 (фиг. 1, фиг. 2). Питание управляемого источника 11 постоянного напряжения осуществляют или от сети собственных нужд станции, или от обмоток электромагнитной части реактора (фиг. 3). В секциях 2 (фиг. 7) управляющей обмотки 4 после этого протекает переменный ток, наведенный магнитным полем тока сетевой обмотки 3. Встречно параллельное соединение пар (фиг. 7а) или групп (фиг. 7b) секций 2 управляющей обмотки 4 обеспечивает то, что этот наведенный переменный ток практически равен нулю.
В случае, когда напряжение управляемого источника И постоянного напряжения (фиг. 1, фиг. 2) равно нулю (режим холостого хода), в управляющей обмотке 4 (фиг. 7) постоянный ток также равен нулю. В этом режиме заявленное устройство работает как обычный шунтирующий реактор с немагнитными зазорами (фиг. 7). При этом ток сетевой обмотки 3 (фиг. 7) создает магнитный поток, у которого индукция магнитного поля имеет осевую Во и радиальную Br составляющие. Осевая составляющая индукции Во проходит по элементам 7 стержня 6 так, что ее значения в вертикальных внешних частях 9 и вертикальных внутренних частях 8 практически одинаковы. Активным сечением стержня 6 магнитопровода 5 является сумма активных сечений вертикальных внешних частей 9 и вертикальных внутренних частей 8 элемента 7 стержня 6 магнитопровода 5. Радиальная составляющая индукции Br этого магнитного поля входит в боковую шихтованную поверхность внешней части 9 элемента 7 и не создает дополнительные потери в стержне 6 магнитопровода 5. Значение осевой составляющей Во в стержне 6 выбирается так, что пластины электротехнической стали элементов 7 стержня 6 не насыщены. В этом случае магнитная проницаемость электротехнической стали и индуктивность сетевой обмотки 3 достигает максимального значения для конкретной геометрии и числа витков сетевой обмотки 3, а так же, для конкретных размеров элементов 7 стержня 6 магнитопровода 5 и немагнитных зазоров 10 между ними.
В случае необходимости изменения потребляемой мощности и, соответственно, тока реактора по сигналам автономной системы 19 автоматического управления (фиг. 3) изменяется напряжение, вырабатываемое управляемым источником 11 (фиг. 1, фиг. 2) постоянного напряжения, и по виткам секций 2 управляющей обмотки 4 течет ток. Этот ток создает в элементах 7 стержня 6 магнитопровода 5 дополнительный магнитный поток, проходящий по вертикальным и горизонтальным частям элементов 7 стержня 6. Величина индукции Вт этого дополнительного магнитного потока (потока подмагничивания) зависит от величины тока, вырабатываемого управляемым источником 11 постоянного напряжения, конкретной геометрии и числа витков секций 2 сетевой обмотки 3, а так же конкретных размеров элементов 7 стержня 6 магнитопровода 5 и немагнитных зазоров 10 между ними. При этом, результирующий магнитный поток - сумма потоков переменного магнитного поля секций 2 сетевой обмотки 3 и постоянного магнитного поля секций 2 управляющей обмотки 4 во внешних 8 и внутренних 9 вертикальных частях элементов 7 стержней 6 магнитопровода 5 будет разной. Величина индукции Bs этого результирующего потока будет меняться во внешних 8 и внутренних 9 вертикальных частях элементов 7 каждый полупериод частоты переменного магнитного поля Во секций 2 сетевой обмотки 3. Индукция Bs будет равна или сумме индукций (Bo+Bm) или их разности (Bo-Bm), в зависимости от направления индукции переменного магнитного поля Во. Если ток в секциях 2 управляющей обмотки 4 достигает такого значения, при котором величина индукции Bm такова, что сумма Bs=(Bo+Bm) превышает величину индукции Bn насыщения электротехнической стали (Bn=2,0-2,2 тесла), то магнитная проницаемость соответствующего вертикального участка резко уменьшается.
Режим, при котором в течении всего полупериода частоты переменного магнитного поля Bo во внутренней 8 и внешней 9 вертикальных частях элементов 7 стержней 6 суммарная индукция Bs=(Bo+Bm) больше величины индукции Bn технического насыщения электротехнической стали, а величина разницы (Bo-Bm) меньше Bn, далее называется режимом «полупериодного насыщения». Активное сечение элемента 7 стержня 6 в режиме «полупериодного насыщения» уменьшается на величину площади сечения соответствующего вертикального участка элемента 7 стержня 6. Такие изменения приводят к резкому уменьшению индуктивности сетевой обмотки 3 и, соответственно, росту потребляемого реактором тока.
При дальнейшем увеличении постоянного напряжения и тока в секциях 2 управляющей обмотки 4, соответственно возрастет результирующая индукция магнитного поля Bs, проходящая по горизонтальным частям элемента 7 стержня 6. Поскольку в горизонтальных частях индукции Во и Вт направлены практически перпендикулярно друг другу, то электротехническая сталь в горизонтальных участках насытится, когда результирующая индукция в них Bs, приблизительно равная корню квадратному из суммы квадратов индукций Во и Bm, будет превышать индукцию насыщения стали Bn. Величина результирующей индукции Bs в горизонтальных участках элементов 7 стержня 6 не зависит от изменения полупериодов основной гармоники. Режим, при котором, в дополнение к режиму полупериодного насыщения одного из вертикальных участков, происходит насыщение горизонтальных участков элементов 7 стержня 6 магнитопровода 5, в течении всего полупериода частоты магнитного поля Во, далее будет называться режимом «полупериоднного продольно поперечного подмагничивания».
В этом режиме, дополнительно к режиму полупериодного насыщения, резко уменьшается величина магнитной проницаемости горизонтальных участков элементов 7 стержня 6 и индуктивность сетевой обмотки 3 дополнительно уменьшается, а ток в ней дополнительно увеличивается.
При дальнейшем, довольно значительном, увеличении постоянного напряжения и тока в секциях 2 управляющей обмотки 4 можно добиться такой величины результирующей индукции Bs, когда все вертикальные и горизонтальные участки элементов 7 стержня 6 магнитопровода 5 будут насыщены в течении всего полупериода частоты переменного магнитного поля Во. Такой режим называется дальше режимом «полнопериодного насыщения». В этом режиме магнитная проницаемость элементов 7 стержня 6 и индуктивность сетевой обмотки 3 еще больше уменьшатся, а потребляемый ток еще больше увеличится.
Уменьшение тока в секциях 2 управляющей обмотки 4 с помощью регулируемого источника 11 постоянного напряжения, подключенного к этим секциям 2, приводит к обратному процессу размагничивания. При этом относительная магнитная проницаемость соответствующих участков элементов 7 стержня 6 магнитопровода 5 изменяется от десятков тысяч в режиме холостого хода до нескольких единиц в режиме «полнопериодного насыщения». Изменение магнитной проницаемости элементов 7 стержня 6 магнитопровода 5 приводит к изменению индуктивности сетевой обмотки 3 и, следовательно, к изменению потребляемой реактором реактивной мощности.
Значительное, до одного-двух десятков, уменьшение относительной магнитной проницаемости элементов 7 стержня 6 магнитопровода 5 происходит уже при переходе от режима холостого хода к режиму «полупериодного насыщения» и к режиму «полупериодного продольно поперечного подмагничивания». Этот переход можно обеспечить при мощности управляемого источника 11 постоянного напряжения, равной от 5% до 10% установленной мощности реактора. Дальнейший переход к режиму «полнопериодного насыщения» требует значительного увеличения мощности управляемого источника 11 постоянного напряжения. При этом относительная магнитная проницаемость элементов 7 стержня 6 изменяется незначительно (от одного-двух десятков до нескольких единиц). В связи с этим рабочий диапазон изменения тока в секциях 2 управляющей обмотки 4 в заявленном устройстве выбирается в диапазоне от значений тока в одном из режимов «полупериодного насыщения» (в большинстве случае этот режим выбирается номинальным) до значений этого тока в режиме холостого хода. При этом изменение тока в сетевой обмотке 3 и ее индуктивности происходит в большом диапазоне, при малой установленной мощности управляемого источника 11 постоянного напряжения (от 5% до 10% номинальной установленной мощности реактора). Кроме того, при необходимости можно увеличить напряжение управляемого источника 11 постоянного напряжения на короткое время, обеспечив форсированный режим подмагничивания или размагничивания.
В заявленном устройстве достигается основной технический результат: обеспечивается возможность управляемого низковольтного подмагничивания локальных элементов стержня магнитопровода, что снижает уровень установленной мощности электронной системы управления реактором при сохранении его функциональных возможностей, за счет чего повышается надежность работы устройства с одновременным снижением стоимости реактора.
С помощью заявляемого реактора можно решать различные проблемы электрических сетей - компенсацию реактивной мощности сети, стабилизацию напряжения в точке подключения реактора к сети, снижение потерь в сети и другие.
Заявляемое техническое решение может быть изготовлено на существующем оборудовании с использованием известных материалов и средств, что подтверждает промышленную применимость заявленного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| УПРАВЛЯЕМЫЙ ЭЛЕКТРИЧЕСКИЙ РЕАКТОР С ПОПЕРЕЧНЫМ ПОДМАГНИЧИВАНИЕМ | 2015 |
|
RU2584821C1 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ РЕАКТИВНОЙ МОЩНОСТИ ЭЛЕКТРИЧЕСКОЙ СЕТИ (ВАРИАНТЫ) | 2015 |
|
RU2585007C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ЭЛЕМЕНТА МАГНИТНОЙ СИСТЕМЫ ТРАНСФОРМАТОРА ИЛИ РЕАКТОРА | 2015 |
|
RU2585008C1 |
| Устройство для измерения токов в обмотках высоковольтных маслонаполненных трансформаторов, автотрансформаторов или электрических реакторов | 2018 |
|
RU2678330C1 |
| ЭЛЕКТРИЧЕСКИЙ РЕАКТОР С РЕГУЛИРУЕМЫМ ПОДМАГНИЧИВАНИЕМ | 1993 |
|
RU2063084C1 |
| ЭЛЕКТРИЧЕСКИЙ ТРЕХФАЗНЫЙ РЕАКТОР С ПОДМАГНИЧИВАНИЕМ | 2012 |
|
RU2486619C1 |
| ТРЕХФАЗНЫЙ КОЛЬЦЕВОЙ РЕАКТОР | 2007 |
|
RU2339109C1 |
| Система предупреждения взрыва пожара высоковольтного электрического оборудования | 2020 |
|
RU2729888C1 |
| ЭЛЕКТРИЧЕСКИЙ ТРЕХФАЗНЫЙ РЕАКТОР С ПОДМАГНИЧИВАНИЕМ | 2010 |
|
RU2418332C1 |
| ЭЛЕКТРИЧЕСКИЙ УПРАВЛЯЕМЫЙ ПОДМАГНИЧИВАНИЕМ ТРЕХФАЗНЫЙ РЕАКТОР | 1998 |
|
RU2132581C1 |
Управляемый электрический реактор относится к области электротехники и может быть использован как шунтирующий реактор для регулирования напряжения и реактивной мощности в высоковольтных линиях электропередач. Реактор содержит электронную систему управления и электромагнитную часть, включающую намотанные проводами секции сетевой обмотки и управляющей обмотки в каждой из фаз реактора, а также стержневой магнитопровод, стержни которого выполнены из элементов, расположенных последовательно по высоте и разделенных на две параллельные части, соответственно, внутреннюю и внешнюю. Во внутренней части и наружной части элемента стержня выполнен немагнитный зазор, витки проводов секций сетевой обмотки охватывают сечение стержня целиком, а витки проводов секций управляющей обмотки - частично. Число секций управляющей обмотки парное, концы расположенных рядом секций в управляющей обмотке соединены параллельно, направление намотки в них - встречное, параллельные части элемента стержня реактора выполнены в виде дисков из радиально шихтованных по периметру пластин электротехнической стали, отделенных от других элементов стержня немагнитными зазорами, секции управляющей обмотки расположены внутри внешнего диска, секции сетевой обмотки расположены снаружи внешнего диска, электронная система управления выполнена в виде управляемого источника постоянного напряжения, выходные клеммы которого соединены с концами пары секций управляющей обмотки. Технический результат: обеспечивается возможность управляемого низковольтного подмагничивания локальных элементов стержня магнитопровода. 4 з.п. ф-лы, 7 ил.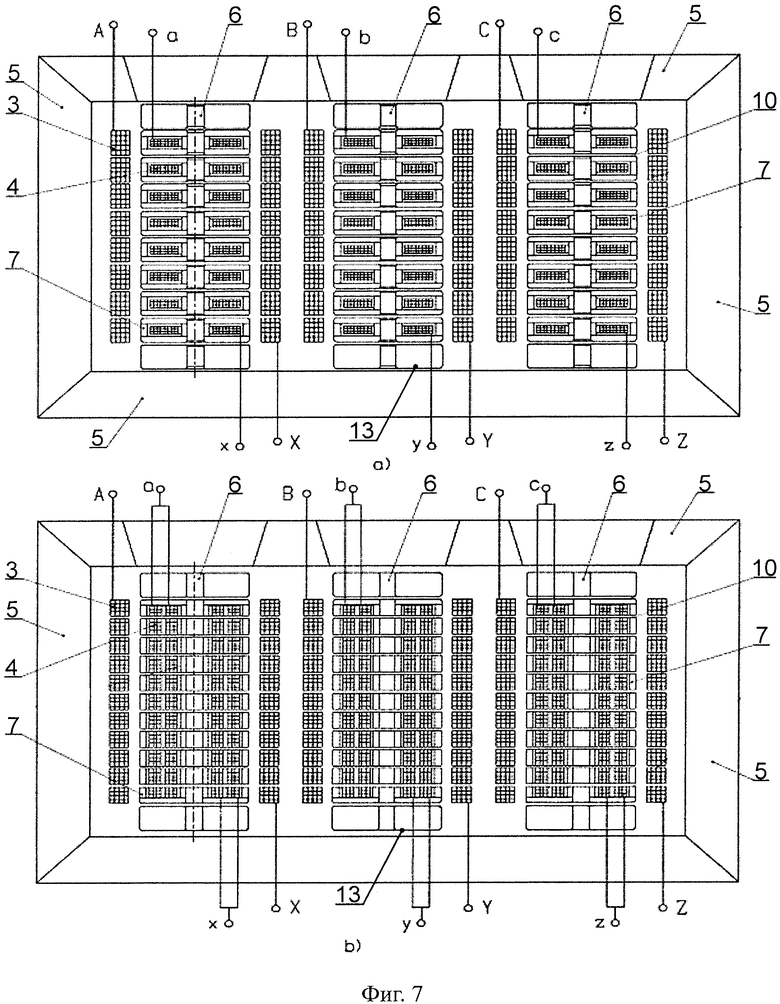
1. Управляемый электрический реактор, содержащий электронную систему управления и электромагнитную часть, включающую в каждой из фаз реактора сетевую и управляющую обмотки, состоящие из намотанных проводами секций, а также стержневой магнитопровод, стержни которого выполнены из элементов, расположенных последовательно по высоте и разделенных на две параллельные части - внутреннюю и внешнюю, при этом во внешней части каждого элемента стержня выполнен немагнитный зазор, витки проводов секций сетевой обмотки охватывают сечение стержня целиком, а витки проводов секций управляющей обмотки охватывают сечение стержня частично, отличающийся тем, что число секций управляющей обмотки на стержне парное, концы расположенных рядом секций в управляющей обмотке соединены параллельно, а направление намотки в них - встречное, параллельные части по крайней мере одного элемента стержня реактора выполнены в виде дисков из радиально шихтованных по периметру пластин электротехнической стали, отделенных от других элементов стержня немагнитными зазорами, как во внешней, так и во внутренней частях, при этом секции управляющей обмотки расположены внутри внешнего диска, а секции сетевой обмотки расположены снаружи внешнего диска, электронная система управления выполнена в виде по крайней мере одного управляемого источника постоянного напряжения, выходные клеммы которого соединены с концами по крайней мере одной пары секций управляющей обмотки.
2. Управляемый электрический реактор по п. 1, отличающийся тем, что концы управляющих обмоток разных фаз соединены по схеме «разомкнутый треугольник», причем разомкнутые концы соединены с управляемым источником постоянного напряжения.
3. Управляемый электрический реактор по п. 1, отличающийся тем, что на стержнях магнитопровода установлены дополнительные компенсационные обмотки, концы разных фаз которых соединены по схеме «треугольник».
4. Управляемый электрический реактор по п. 1, отличающийся тем, что управляемый источник постоянного напряжения содержит последовательно соединенные трансформатор питания полупроводникового преобразователя, полупроводниковый преобразователь с блоком защиты от перенапряжений на входе и автономную систему автоматического управления.
5. Управляемый электрический реактор по п. 4, отличающийся тем, что компенсационные или сетевые обмотки каждой фазы содержат дополнительные отводы, соединенные с трансформатором питания управляемого источника постоянного напряжения.
| УПРАВЛЯЕМЫЙ ШУНТИРУЮЩИЙ РЕАКТОР-ТРАНСФОРМАТОР | 2011 |
|
RU2478236C1 |
| УПРАВЛЯЕМЫЙ РЕАКТОР С ТРЕХСТЕРЖНЕВЫМ МАГНИТОПРОВОДОМ | 2012 |
|
RU2518149C2 |
| CN 103500633 A, 08.01.2014 | |||
| Приспособление для ограничения хода бабы парового молота | 1929 |
|
SU18428A1 |

