Настоящее изобретение относится к области технических средств автоматизации.
При наличии электромеханического компонента в системе автоматизации, например, при наличии переключающего устройства или защитного переключающего устройства, состояние и режим работы электромеханических компонентов могут изменяться в зависимости от условий окружающей среды. Причинами этого являются, например, изменения температуры, колебания динамической нагрузки, износ компонентов, износ контактов для электрических переключающих контактов или механический износ клапанов.
В настоящее время прогнозирование срока службы электромеханического компонента обычно производится на основе эмпирических испытаний. При этом обычно предполагается, что испытанные электромеханические компоненты являют собой репрезентативное представление дисперсии параметров и что результаты испытаний соответствуют статистически ожидаемой дисперсии. Наконец, из результатов испытаний получают прогноз, основанный на поведении в условиях износа. Что касается электромеханических компонентов, в частности реле, было обнаружено, что распределение Вейбулла (Weibull distribution) на основе экспериментально определенных опорных точек может быть пригодным к использованию в отношении износа переключающих контактов с точки зрения времени отказа.
В соответствии с определенным распределением Вейбулла можно затем получить прогноз количества циклов переключения, которое обычно производится некоторым процентом общего количества электромеханических компонентов. Недостатком такого подхода является то, что точность прогноза зависит от количества проверенных электромеханических компонентов и от способности представлять фактически возникающую дисперсию параметров. Другим недостатком является то, что предельное значение в конкретном случае использования электромеханического компонента обычно устанавливается слишком осторожно, т.е. периодичность технического обслуживания устанавливается чрезмерное количество раз и слишком часто, и, как следствие, электромеханические компоненты становятся слишком большими и излишне дорогими. Еще одним недостатком является то, что ряд электромеханических компонентов при использовании выходит из строя раньше, чем ожидается отказ, и, следовательно, могут возникнуть сбои, ошибки и даже потенциально опасные отказы.
Следовательно, целью настоящего изобретения является разработка эффективного технического решения для контроля электромеханического компонента системы автоматизации.
Цель достигается за счет признаков независимых пунктов формулы изобретения. Полезные разработки являются предметом зависимых пунктов формулы изобретения, описания и чертежей.
В соответствии с первым аспектом изобретение относится к способу контроля электромеханического компонента системы автоматизации. Способ включает в себя получение переменной механического состояния электромеханического компонента, получение переменной электрического состояния электромеханического компонента и определение состояния электромеханического компонента на основе многомерного поля характеристических линий с множеством состояний электромеханического компонента, причем переменная механического состояния и переменная электрического состояния связаны с каждым состоянием электромеханического компонента.
Кроме того, в соответствии с вариантом осуществления в многомерном поле характеристических линий геометрический параметр связан с каждым состоянием электромеханического компонента, причем способ включает в себя определение геометрического параметра электромеханического компонента и определение состояния электромеханического компонента на основе многомерного поля характеристических линий, причем определенное состояние связано с полученной переменной механического состояния, полученной переменной электрического состояния и геометрическим параметром.
В соответствии с вариантом осуществления многомерное поле характеристических линий представлено значениями цифровых данных, в частности значениями предварительно заданных цифровых данных. Значения цифровых данных могут быть предварительно сохранены в памяти электромеханического компонента.
В соответствии с вариантом осуществления способ включает в себя интерполяцию между опорными точками многомерного поля характеристических линий, чтобы определить состояние электромеханического компонента, причем опорные точки задаются переменными электрического состояния, переменными механического состояния и/или геометрическими параметрами.
В соответствии с вариантом осуществления способ включает в себя определение многомерного поля характеристических линий на основе модели поведения электромеханического компонента, причем модель поведения учитывает влияние полученной переменной механического состояния на полученную переменную электрического состояния.
В соответствии с вариантом осуществления многомерное поле характеристических линий определяется путем выполнения моделирования поведения электромеханического компонента, причем моделирование поведения реализует модель поведения.
В соответствии с вариантом осуществления способ дополнительно включает в себя отображение определенного состояния электромеханического компонента, в частности с помощью устройства отображения.
В соответствии с вариантом осуществления способ дополнительно включает в себя генерирование сигнала управления для управления электромеханическим компонентом в соответствии с определенным состоянием электромеханического компонента и управление электромеханическим компонентом с помощью сгенерированного сигнала управления.
В соответствии с вариантом осуществления переменную механического состояния и переменную электрического состояния получают электромеханическим компонентом.
В соответствии с вариантом осуществления переменная механического состояния представляет собой одну из следующих переменных механического состояния: дребезг контакта электромеханического компонента, длительность дребезга при дребезге контакта электромеханического компонента, число отскоков для отскоков контакта электромеханического компонента, температура элемента электромеханического компонента, температура окружающей среды электромеханического компонента, скорость движения элемента электромеханического компонента, в частности якоря, усилия контакта или усилия разъединения контакта электромеханического компонента.
В соответствии с вариантом осуществления переменная электрического состояния представляет собой ток через электромеханический компонент или напряжение электромеханического компонента.
В соответствии с вариантом осуществления определенное состояние электромеханического компонента представляет собой срок службы электромеханического компонента.
В соответствии с вариантом осуществления электромеханический компонент представляет собой электромеханический переключатель, в частности реле.
В соответствии со вторым аспектом изобретение относится к электромеханическому компоненту. Электромеханический компонент содержит устройство получения, выполненное с возможностью получать переменную механического состояния электромеханического компонента и переменную электрического состояния электромеханического компонента. Кроме того, электромеханический компонент содержит память, в которой сохраняется многомерное поле характеристических линий с множеством состояний электромеханического компонента, причем переменная механического состояния и переменная электрического состояния связаны с каждым состоянием электромеханического компонента. Кроме того, электромеханический компонент содержит процессор, который выполнен с возможностью определять состояние электромеханического компонента на основе многомерного поля характеристических линий.
Электромеханический компонент выполнен с возможностью осуществлять способ. Дополнительные признаки электромеханического компонента вытекают непосредственно из признаков способа.
В соответствии с третьим аспектом изобретение относится к компьютерной программе с программным кодом для осуществления способа. Электромеханический компонент может быть настроен с помощью программного обеспечения для осуществления программного кода или частей программного кода.
Изобретение может быть реализовано в виде аппаратного и/или программного обеспечения.
Дополнительные варианты осуществления разъясняются более подробно со ссылкой на прилагаемые чертежи.
На чертежах:
Фиг. 1 представляет схематическое изображение способа контроля электромеханического компонента системы автоматизации;
Фиг. 2 представляет схематическое изображение электромеханического компонента;
Фиг. 3 представляет схематические изображения многомерных полей характеристических линий;
Фиг. 4а представляет схематическое изображение модели поведения для определения многомерного поля характеристических линий;
Фиг. 4а' представляет схематическое изображение модели поведения для определения многомерного поля характеристических линий;
Фиг. 4b представляет схематическое изображение модели поведения для определения многомерного поля характеристических линий;
Фиг. 4b' представляет схематическое изображение модели поведения для определения многомерного поля характеристических линий;
Фиг. 5а представляет схематическое изображение кривых времени для переменных состояния электромеханического компонента;
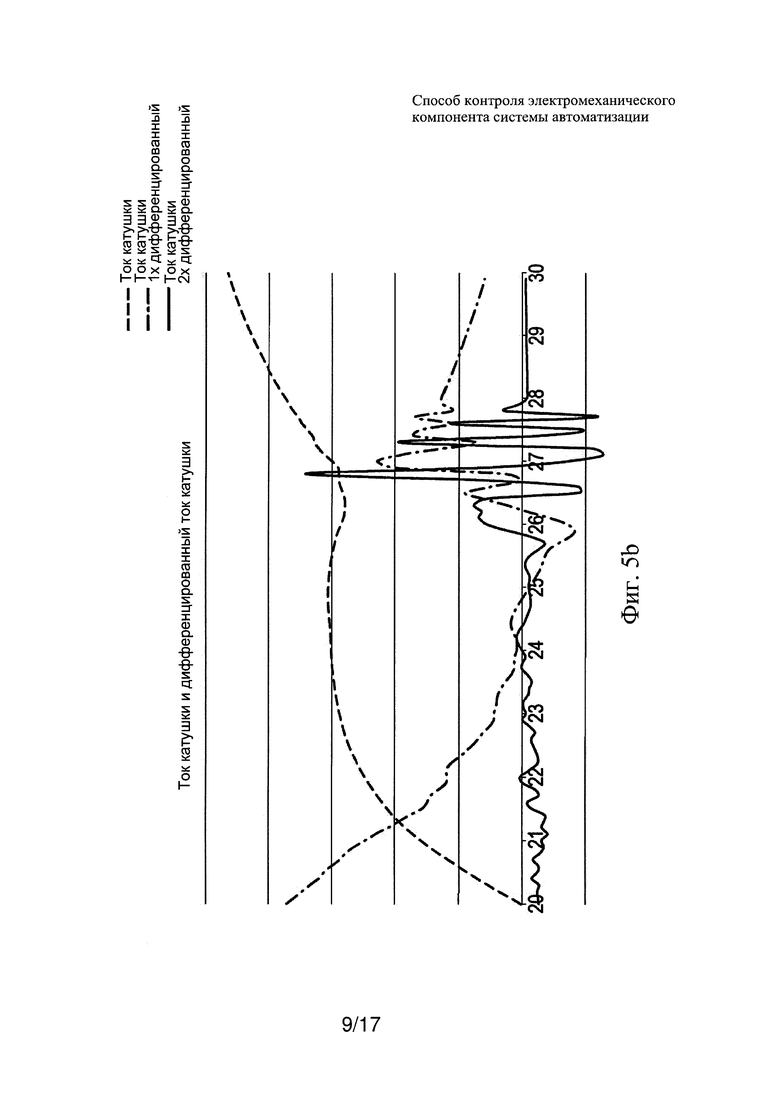
Фиг. 5b представляет схематическое изображение кривых времени для переменных состояния электромеханического компонента;
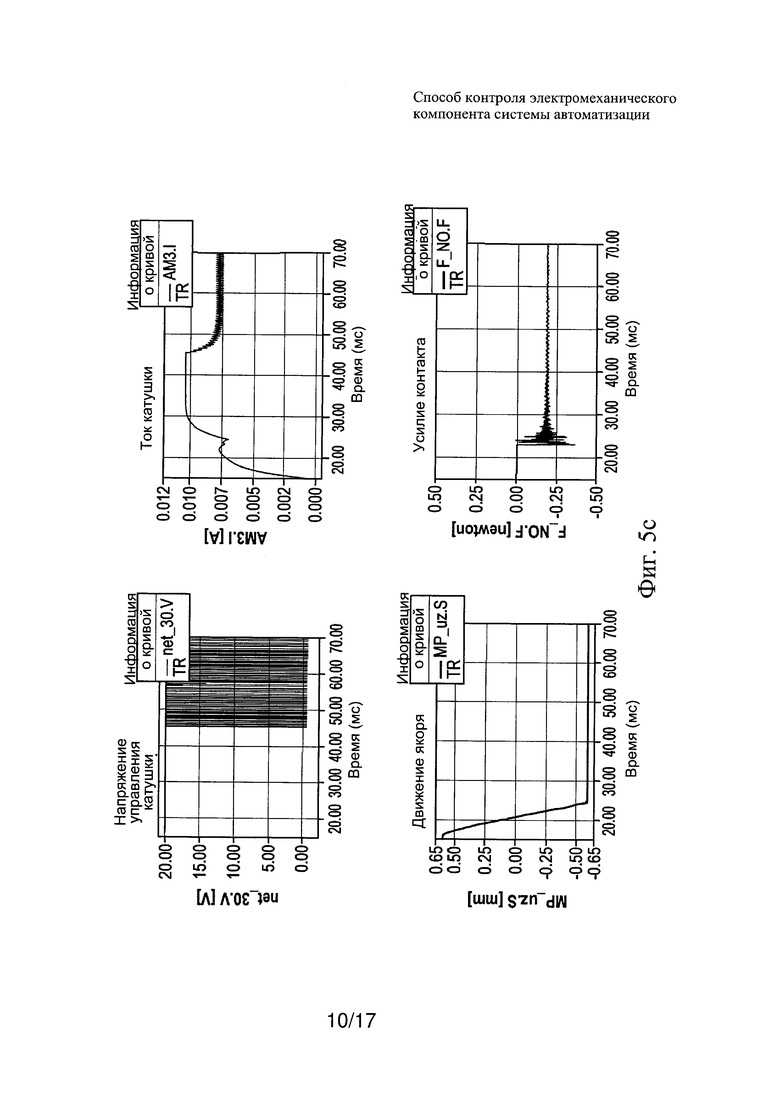
Фиг. 5с представляет схематическое изображение кривых времени для переменных состояния электромеханического компонента;
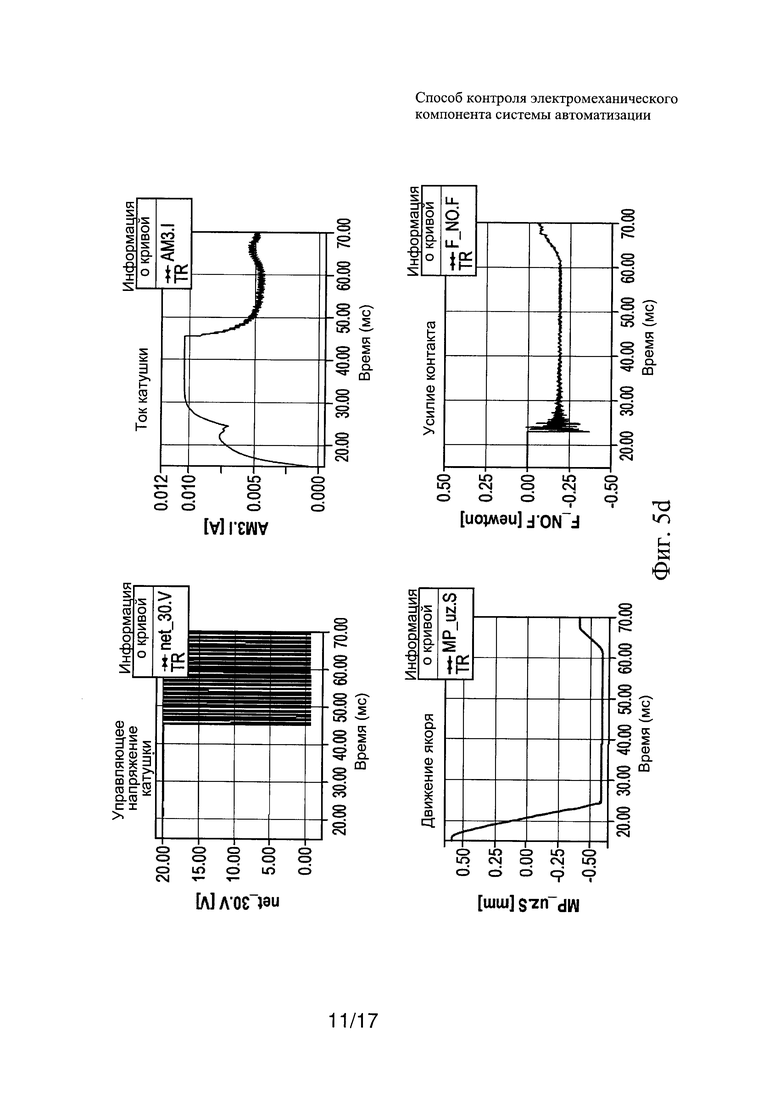
Фиг. 5d представляет схематическое изображение кривых времени для переменных состояния электромеханического компонента;
Фиг. 5е представляет схематическое изображение кривых времени для переменных состояния электромеханического компонента;
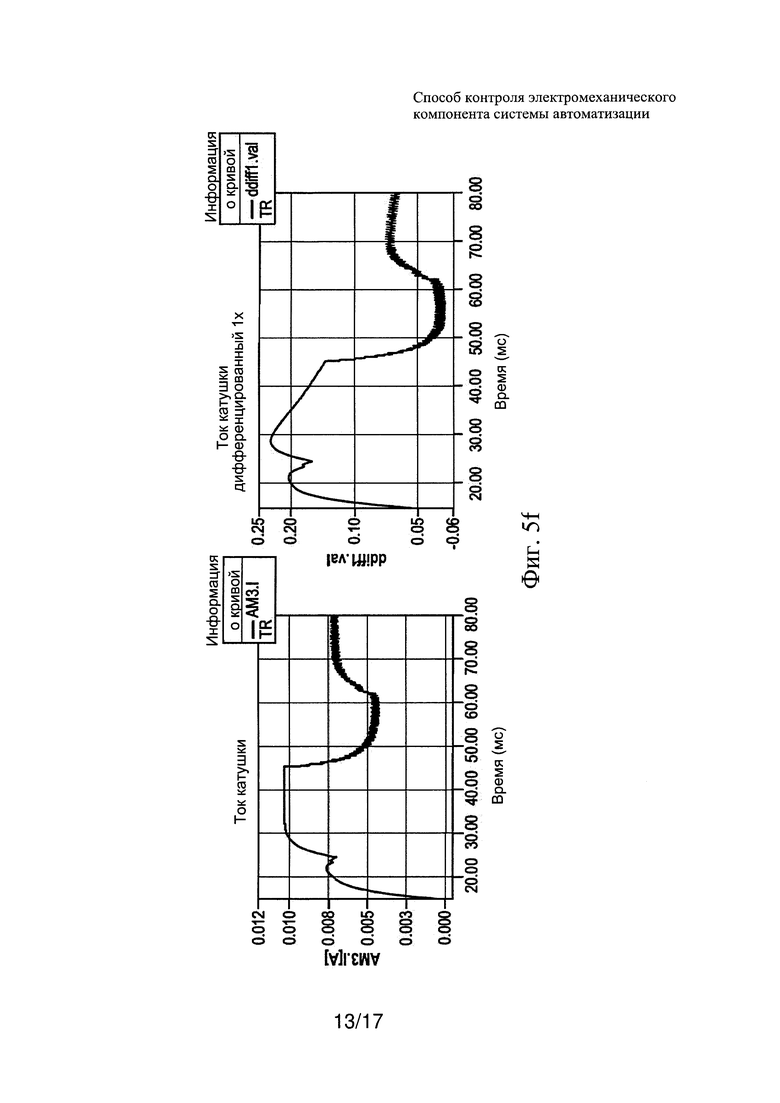
Фиг. 5f представляет схематическое изображение кривых времени для переменных состояния электромеханического компонента;
Фиг. 6а представляет схематическое изображение модели поведения для определения многомерного поля характеристических линий;
Фиг. 6а' представляет схематическое изображение модели поведения для определения многомерного поля характеристических линий;
Фиг. 6b представляет схематическое изображение модели поведения для определения многомерного поля характеристических линий;
Фиг. 6b' представляет схематическое изображение модели поведения для определения многомерного поля характеристических линий.
Фиг. 1 представляет схематическое изображение способа 100 контроля электромеханического компонента системы автоматизации. Способ 100 включает в себя получение 101 переменной механического состояния электромеханического компонента, получение 103 переменной электрического состояния электромеханического компонента, и определение 105 состояния электромеханического компонента на основе многомерного поля характеристических линий с множеством состояний электромеханического компонента, причем переменная механического состояния и переменная электрического состояния связаны с каждым состоянием электромеханического компонента.
Фиг. 2 представляет схематическое изображение электромеханического компонента 200. Электромеханический компонент 200 содержит устройство 201 получения, которое выполнено с возможностью получать переменную механического состояния электромеханического компонента 200 и переменную электрического состояния электромеханического компонента 200. Кроме того, электромеханический компонент 200 содержит память 203, в которой сохраняют многомерное поле характеристических линий с множеством состояний электромеханического компонента 200, причем переменная механического состояния и переменная электрического состояний связаны с каждым состоянием электромеханического компонента 200. Кроме того, электромеханический компонент 200 содержит процессор, который выполнен с возможностью определять состояние электромеханического компонента 200 на основе многомерного поля характеристических линий.
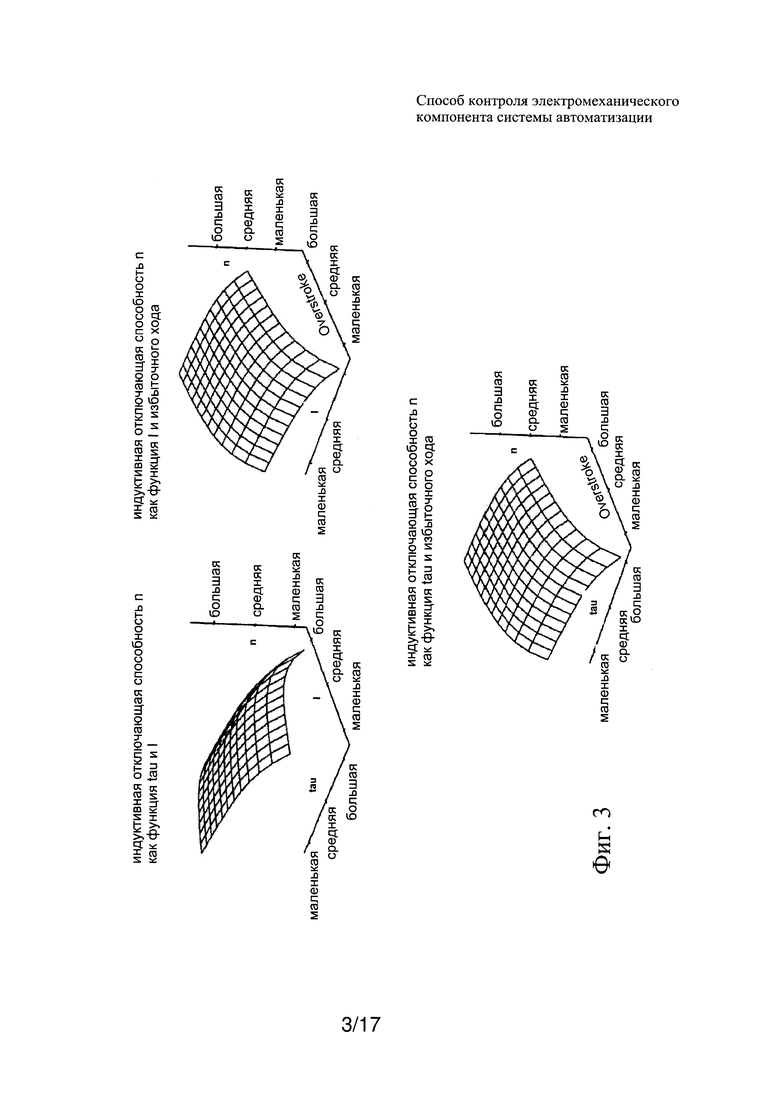
Фиг. 3 представляет схематические изображения многомерных полей характеристических линий. Многомерные поля характеристических линий могут представлять модель поведения для описания состояния, например срока службы, для электромеханического компонента, например реле. Описание состояния может происходить посредством модели поведения, с помощью которой может быть сделан прогноз состояния, например, с учетом условий нагрузки, условий окружающей среды и геометрических параметров.
Концепция может тогда заключаться в том, что экспериментально определенные состояния электромеханического компонента, например значения срока службы, представлены в модели поведения с учетом условий нагрузки, условий окружающей среды, переменных механического состояния, переменных электрического состояния и/или геометрических параметров для того, чтобы получить прогноз ожидаемого состояния, например срока службы, в смысле надежности.
В этом процессе, например, нагрузка, подлежащая переключению, может быть ассоциирована с диапазонами нагрузок, каждый из которых характеризуется одним и тем же механизмом отказа, но разными силами нагрузки. Примерами являются:
- напряжение постоянного тока/напряжение переменного тока;
- индуктивная нагрузка/резистивная нагрузка/емкостная нагрузка и комбинации; или
- низкая нагрузка или прерывание контакта.
В результате может быть установлено поле характеристических линий, которое представляет состояние, например срок службы, электромеханического компонента в зависимости от условий нагрузки, условий окружающей среды, переменных механического состояния, переменных электрического состояния и/или геометрических параметров.
В частности, для этой цели могут быть выполнены следующие шаги:
Шаг 1:
Запись всех соответствующих переменных электрического состояния, переменных механического состояния, геометрических параметров и - при желании - дополнительных параметров каждого проверяемого электромеханического компонента.
Шаг 2:
Установление и/или определение диапазонов нагрузок и определение выбранных нагрузок, которые достаточным образом представляют диапазоны нагрузок, например максимальное значение, среднее значение и минимальное значение.
Шаг 3:
Выполнение испытаний в выбранных точках определенных диапазонов нагрузок с различными параметрами, например избыточным ходом, шагом между контактами, силой возврата в начальное состояние и временем отскока.
Шаг 4:
Подготовка модели поведения на основе результатов испытаний с учетом отклонения или дисперсии параметров.
Использование прогноза, основанного на многомерном поле характеристических линий, происходит путем получения ожидаемого состояния из поля характеристических линий с учетом характеристических значений электромеханического компонента, например избыточного хода, шага между контактами, силы возврата в начальное состояние или времени отскока. Принимая во внимание уже завершенные циклы переключения, можно, например, спрогнозировать оставшийся срок службы.
Примером использования этой модели поведения является представление фактического электромеханического компонента, например, реле с электроникой и программно-аппаратным обеспечением, в котором характеристические значения, которые важны для срока службы электрики, определяются или измеряются во время текущей работы, и должен быть получен остаточный срок службы с учетом коммутируемой нагрузки с напряжением/током по контакту, уже завершенных циклов переключения и/или условий окружающей среды.
В случае отказа, ожидаемого в течение определенного времени из-за большого количества циклов переключения, система автоматизации может поддерживаться в превентивном режиме или электромеханический компонент может быть заменен. Интегрирование этой модели поведения в модель системы с помощью многомерного поля характеристических линий составляет преимущество.
Ниже описаны более подробно дополнительные варианты осуществления способа 100 и электромеханического компонента 200.
Способ 100 позволяет производить анализ и контроль электромеханического компонента 200 с использованием многомерного поля характеристических линий, которое может быть определено на основе модели поведения. Для этой цели может быть использован имитатор поведения. Электромеханический компонент 200 может быть, например, переключающим устройством. Концепция позволяет представлять поведение электромеханического компонента 200 с помощью многомерного поля характеристических линий, используя переменные состояния, полученные от фактического электромеханического компонента 200, которые могут быть характеристическими значениями.
В моделировании поведения или моделировании системы компоненты различных доменов, которые присутствуют в системе автоматизации, представлены в моделях поведения и связаны посредством переменных состояния или переменных действия, например, через силу тока, силу, поток или логическое состояние. Преимущество моделирования поведения заключается, например, в том, что влияние переменных состояния и влияние обратной связи для переменных состояния могут быть приняты во внимание. Так, например, могут быть представлены влияния обратной связи механических систем на электромагнитные и электрические системы.
Таким образом, моделирование поведения представляет состояние электромеханического компонента 200. То есть, например, могут быть получены значения и изменения переменных механического или электрического состояния.
В дополнение к представлению в моделях поведения с двунаправленным потоком переменных состояния, модели сложного поведения могут быть представлены с помощью метамоделей и интегрированы в моделирование поведения. Использование метамоделей является преимуществом, например, в представлении в характеристике надежности электрических контактов в зависимости от нагрузки, механического чрезмерного хода, шага между контактами, силы контакта, силы возврата в исходное состояние, зависящего от времени дребезга или скорости открытия. Более того, благодаря интеграции метамоделей вероятность отказа может быть определена с помощью полученных переменных состояния, а в случае потенциально опасного состояния может быть выполнено отключение системы автоматизации.
Модель поведения или имитационная модель обычно содержат объекты из следующих областей:
- электрические, например электронные схемы, датчики, например фотоэлектрические датчики, или переключатели;
- магнитные, например язычковые магнитоуправляемые контакты, датчики;
- электромагнитные, например реле, экраны, клапаны, датчик Холла;
- текучие среды, например клапаны давления, сопла;
- источники тепла, например нагрузочные резисторы, нагреватели, вентиляторы, кулеры;
- программные объекты, например блоки программно-аппаратного обеспечения, PWM, OSSD; и
- метамодели для представления стохастических связей.
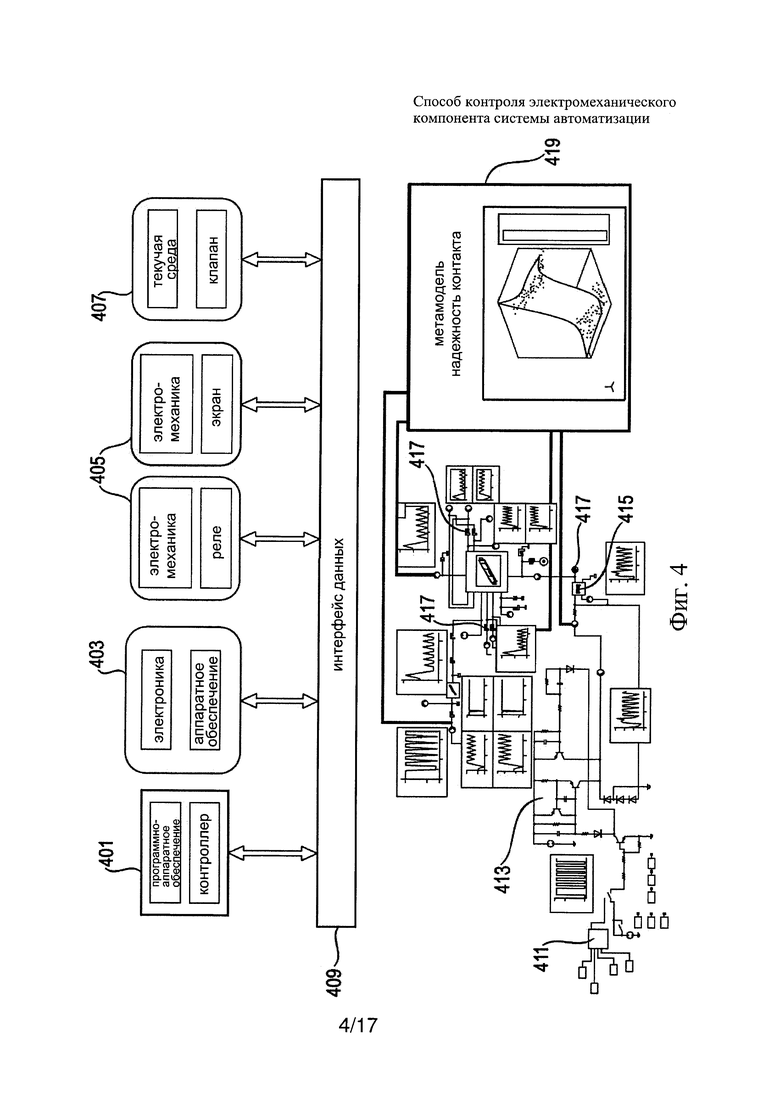
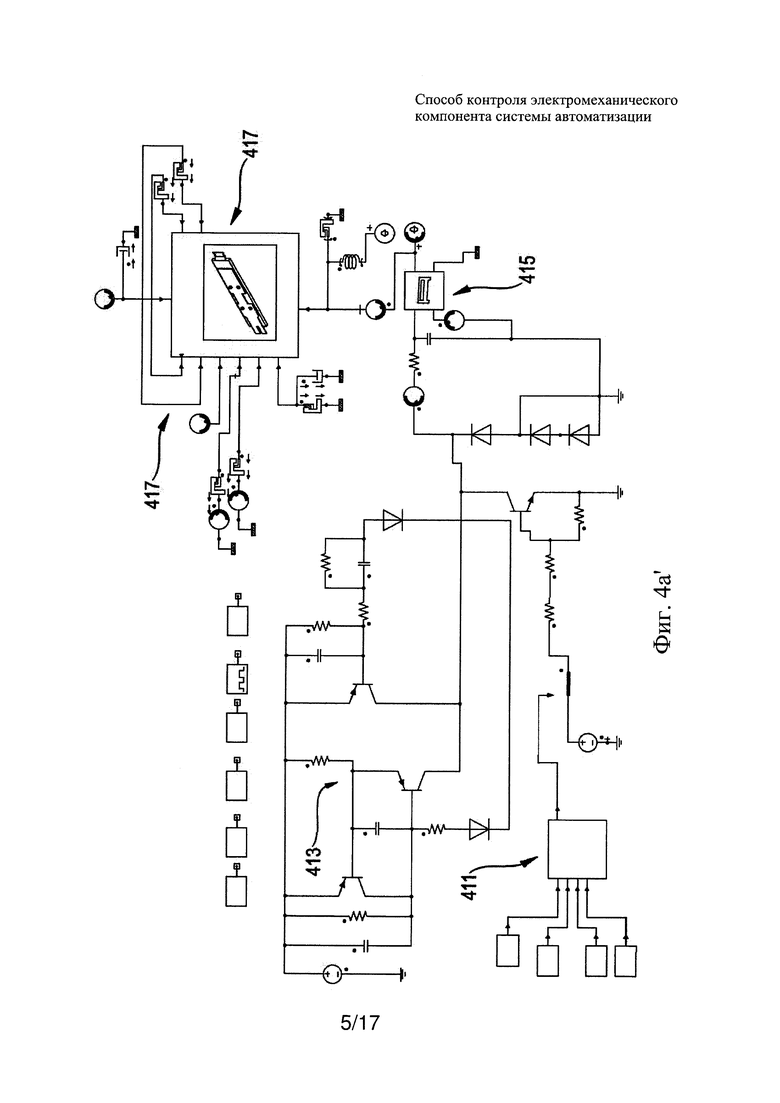
На фиг. 4а и Fig. 4а' показано схематическое изображение модели поведения для определения многомерного поля характеристических линий. Модель поведения относится, например, к электромеханическому переключающему устройству в качестве электромеханического компонента. На схеме показан компонент 401 программно-аппаратного обеспечения, компонент 403 электроники, компонент 405 электромеханики, компонент 407 текучей среды и интерфейс 409 данных для двунаправленной передачи данных. Кроме того, на схеме показан модуль 411 программно-аппаратного обеспечения, модуль 413 электроники, модуль 415 электромагнетизма, модуль 417 механики и модуль 419 метамодели для определения надежности контакта в качестве состояния электромеханического компонента.
Путем проведения моделирования поведения, основанного на модели поведения, можно определить многомерное поле характеристических линий, которое представляет переменные механического состояния и переменные электрического состояния электромеханического компонента относительно состояния электромеханического компонента.
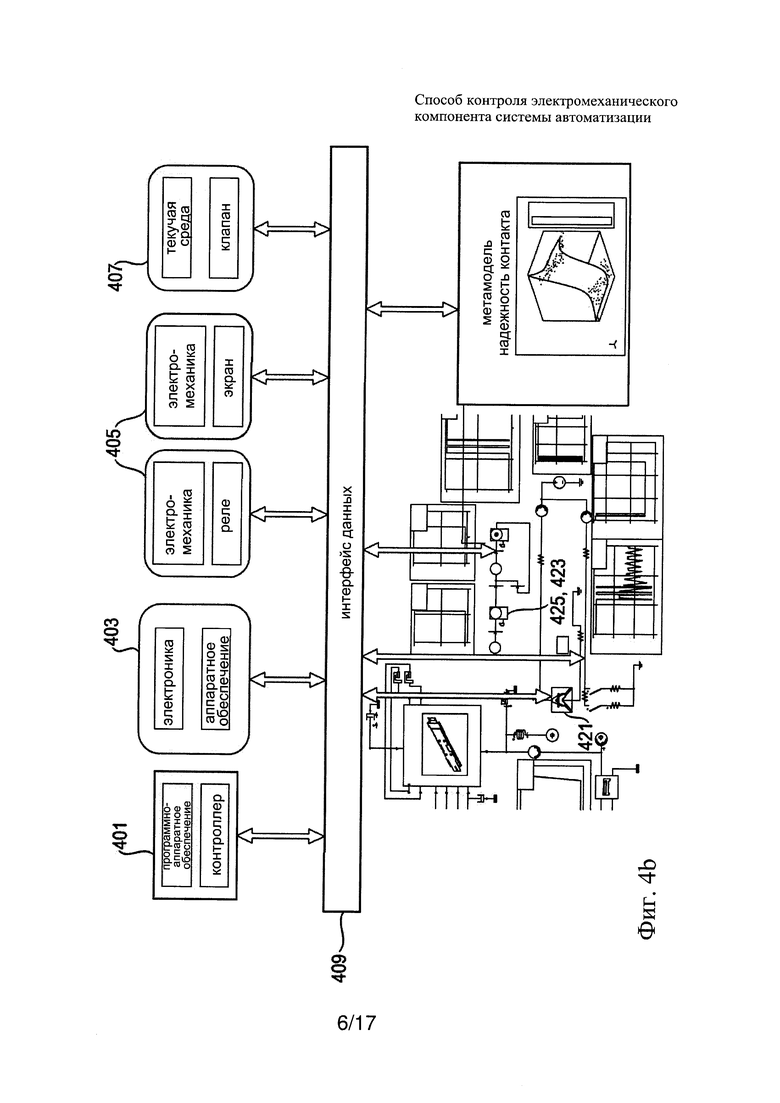
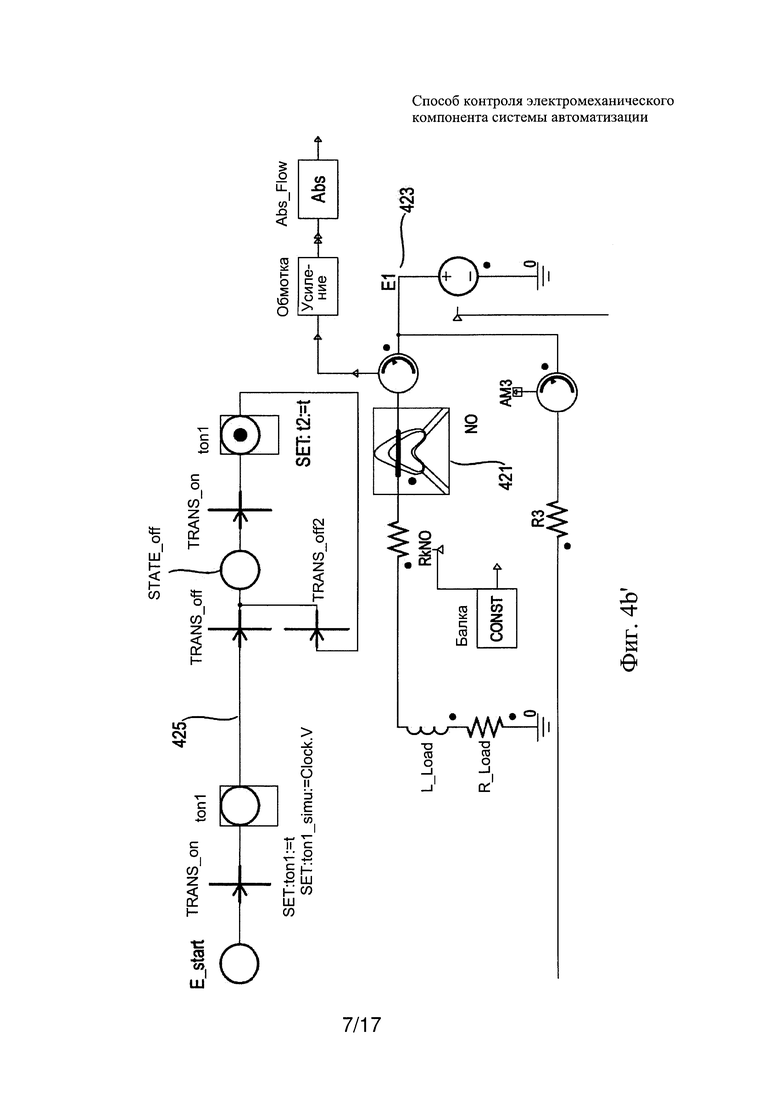
На фиг. 4b и фиг. 4b' показано схематическое изображение модели поведения для определения многомерного поля характеристических линий. Модель поведения относится, например, к электромеханическому переключающему устройству в качестве электромеханического компонента. Схема представляет компонент 401 программно-аппаратного обеспечения, компонент 403 электроники, компонент 405 электромеханики, компонент 407 текучей среды и интерфейс 409 данных для двунаправленной передачи данных. Кроме того, на схеме показан объект 421 для определения длительности электрического дугового разряда в качестве состояния электромеханического компонента, объект 423 для определения характеристик дребезга контактов как состояния электромеханического компонента и объект 425 для определения сопротивления контакта как состояния электромеханического компонента, которое может быть использовано опционально или дополнительно.
Путем проведения моделирования поведения, основанного на модели поведения, можно определить многомерное поле характеристических линий, которое представляет переменные механического состояния и переменные электрического состояния электромеханического компонента относительно состояния электромеханического компонента.
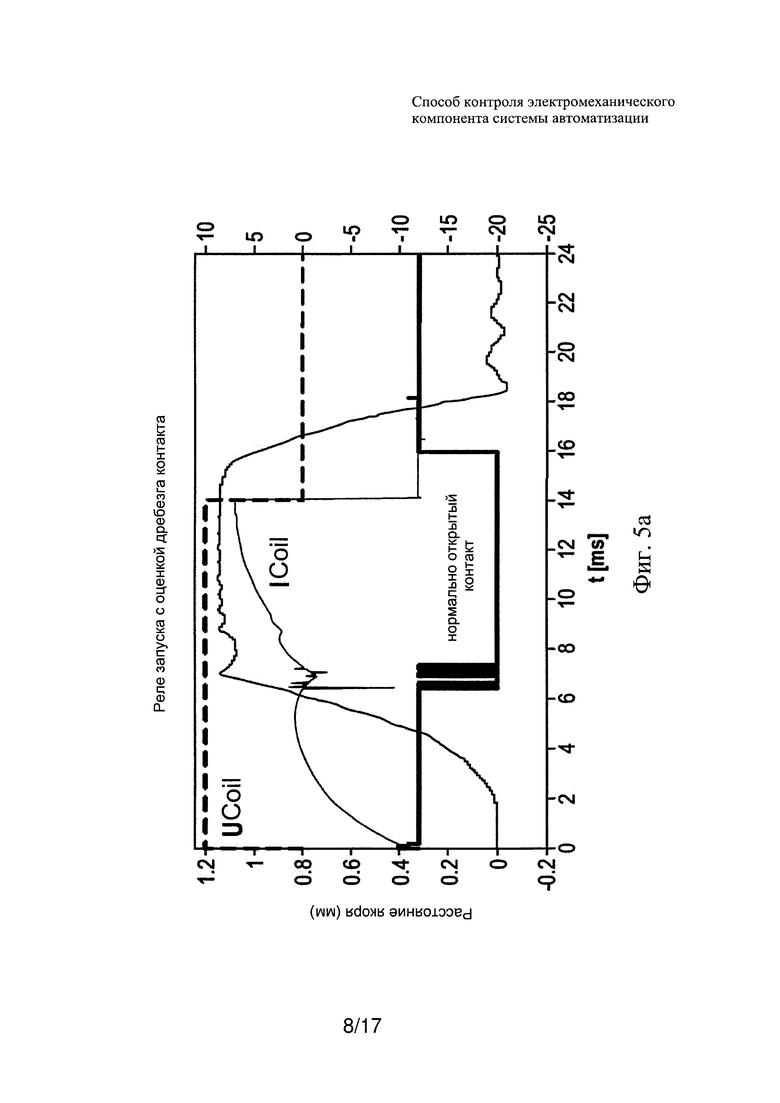
На фиг. 5а-5f показаны схематические изображения кривых зависимости переменных состояния электромеханических компонентов от времени. Ниже приведены более подробные примеры двух вариантов осуществления настоящего изобретения.
Пример первого варианта осуществления:
В случае нагрузок с высоким током включения, например в случае защитных экранов или двигателей, срок службы контакта реле в качестве электромеханического компонента сильно зависит от характеристик дребезга при включении контакта.
Если контакт не отскакивает или если время дребезга меньше 0,1 мкс, так что электрическая дуга при включении обычно не может образоваться, происходит меньше износа контактов из-за нагрева электрической дугой при включении, чем в случае дребезга контактов с временем дребезга обычно более 1-5 мкс и числом отскоков от 2 до 5. Если критические значения, например критическое число отскоков или длительность дребезга, превышены, контакт нагрузки может привариваться без возможности отсоединения, и, следовательно, нагрузка может оставаться включенной, что может представлять потенциально опасное состояние.
Изменение в характеристиках дребезга может происходить в результате множества воздействий, например числа циклов переключения на контакте нагрузки, влияния температуры окружающей среды или механического износа, влияния управляющего напряжения или усталости контактных пружин.
В этом примере осуществления изобретения определяют характеристики дребезга, в частности, число отскоков или продолжительность дребезга контакта нагрузки. В случае изменений, влияющих на то, что характеристики дребезга изменяются до критических значений в отношении числа отскоков или продолжительности дребезга, информация об этом изменении состояния становится доступной электромеханическому компоненту. В дальнейшем, например, может возникнуть предупреждение для пользователя или может быть выполнено выключение в соответствующее время перед отказом, а значит, перед критическим состоянием.
Определение характеристик дребезга может проявиться в том, что ток нагрузки получают с помощью датчика тока, например язычкового магнитоуправляемого контакта, и получают эффект механической обратной связи при дребезге контакта по управляющему току катушки реле. В случае отскакивающих контактов ток нагрузки отключается на короткое время открытым контактом. В случае высоких нагрузок между открытыми контактами может образовываться электрическая дуга. Получение прерывания и/или изменения тока нагрузки может быть затруднительным, если напряжение нагрузки очень велико, например, при напряжении сети, и, таким образом, оставшееся напряжение источника питания изменяется лишь незначительно из-за формирования электрической дуги.
Следовательно, дополнительно или параллельно может быть определено механическое влияние дребезга контакта на управляющий ток катушки. На фиг. 5а представлены напряжение возбуждения катушки реле, ток катушки, ток контакта при нормально открытом контакте и движение якоря. Эти переменные состояния могут быть получены с помощью измерительной техники. При этом очевидно, что импульсы при отскоке нормально открытого контакта оказывают влияние на ток катушки. Это влияние на ток катушки может быть определено и оценено с помощью измерительной техники.
Одна из возможностей оценки состоит в том, чтобы дифференцировать ток катушки от 1 до 2 раз, чтобы получить изменение тока катушки, как показано на фиг. 5b, например. После того, как первый контакт был установлен, импульсы при отскоке могут быть идентифицированы как нули после того, как ток катушки был продифференцирован 2 раза. Из числа и продолжительности нулей можно идентифицировать на стороне управления количество и продолжительность импульсов при отскоке контакта.
Другим возможным использованием является анализ причин импульсов при отскоке контакта и опционально коррекция во время текущей работы. Одной из причин возникновения импульсов при отскоке может быть, например, нагрев реле и связанное с этим увеличение сопротивления катушки. Благодаря этому воздействию ток катушки для возбуждения реле уменьшается, что может одновременно повлечь за собой уменьшение силы магнитной системы и связанное с этим увеличение длительности отскоков или количество импульсов при отскоке.
Другими возможностями являются изменения механических параметров, например, из-за трения или усталости, и, следовательно, изменения кинетических условий, когда контакт установлен. Чтобы определить причины этого, возможно сравнение определенных переменных состояния модели поведения при изменении параметров реле и измеренных переменных состояния фактического объекта. Путем оптимизации параметров модели с целью минимального отклонения характеристики модели, например, дифференцированного тока катушки и измеренного дифференцированного тока катушки, могут быть определены параметры, которые определяют измененное поведение фактического объекта и их значение. Основываясь на полученных данных, возможно, например, путем изменения управляющей характеристики, например, увеличения тока, величины напряжения, формы импульса, длительности импульса, частоты импульса в широтно-импульсной модуляции (ШИМ), влиять на управление характеристиками дребезга таким образом, что количество или продолжительность импульсов при отскоке минимизируется, и, таким образом, время достижения критического состояния, например приваренного без возможности отсоединения контакта, может быть отсрочено.
Пример второго варианта осуществления
Для уменьшения управляющей мощности реле часто выбирается ШИМ-управление. Это имеет преимущество, заключающееся в том, что после включения катушкой реле можно управлять с помощью циклического напряжения, достаточного для поддержания рабочего состояния. Поскольку параметры реле могут проявлять разброс, ширина импульса обычно выбирается таким образом, что это рабочее состояние поддерживалось для всех возможных реле даже в наихудших условиях. Однако, поскольку реле, которые требуют этих наихудших условий, очень мало (в процессах нормального распределения <<0.1%), оставшееся подавляющее большинство управляется с большей мощностью, чем необходимо. Это приводит к нагреву и проблемам, особенно в случае большого количества одновременно управляемых реле.
Концепция состоит в том, что оптимальная мощность для соответствующего реле должна быть получена, например, с помощью отношения импульс-пауза, и управление должно устанавливаться на минимуме таким образом, чтобы всегда поддерживалось рабочее положение.
Обычная последовательность представляет собой следующее:
Шаг 1:
Возбуждение реле в период включения с полным напряжением до тех пор, пока не будет надежно достигнуто конечное положение.
Шаг 2:
ШИМ-настройка рабочего напряжения и измерение тока катушки.
Шаг 3:
В начале движения якоря, которое может быть идентифицировано на основании роста напряжения катушки, изменение скважности импульсов таким образом, что якорь остается надежно в рабочем положении.
На фиг. 5с представлен пример кривой управляющего напряжения, тока катушки, перемещения якоря и усилия контакта в нормальных условиях. Через 45 мс напряжение катушки переключается на ШИМ, выполненную таким образом, что якорь остается в рабочем положении. На фиг. 5d представлен пример случая, когда назначенная ШИМ недостаточна, так что после времени задержки приблизительно 62 мс якорь начинает отделяться от конечного положения и, таким образом, также уменьшается усилие контакта. На фиг. 5е и фиг. 5f показано состояние, в котором обнаружено движение якоря, при этом ток катушки дифференцируется, и движение якоря обнаруживается положительным переходом через ноль дифференцированного тока якоря. С помощью этого сигнала ШИМ теперь изменяется таким образом, что, например, при увеличении значения нагрузки якорь немедленно снова достигает конечного положения надежным образом. Результирующее оставшееся движение якоря минимально, и усилие контакта на контакте нагрузки остается практически неизменным, как показано на фиг. 5е.
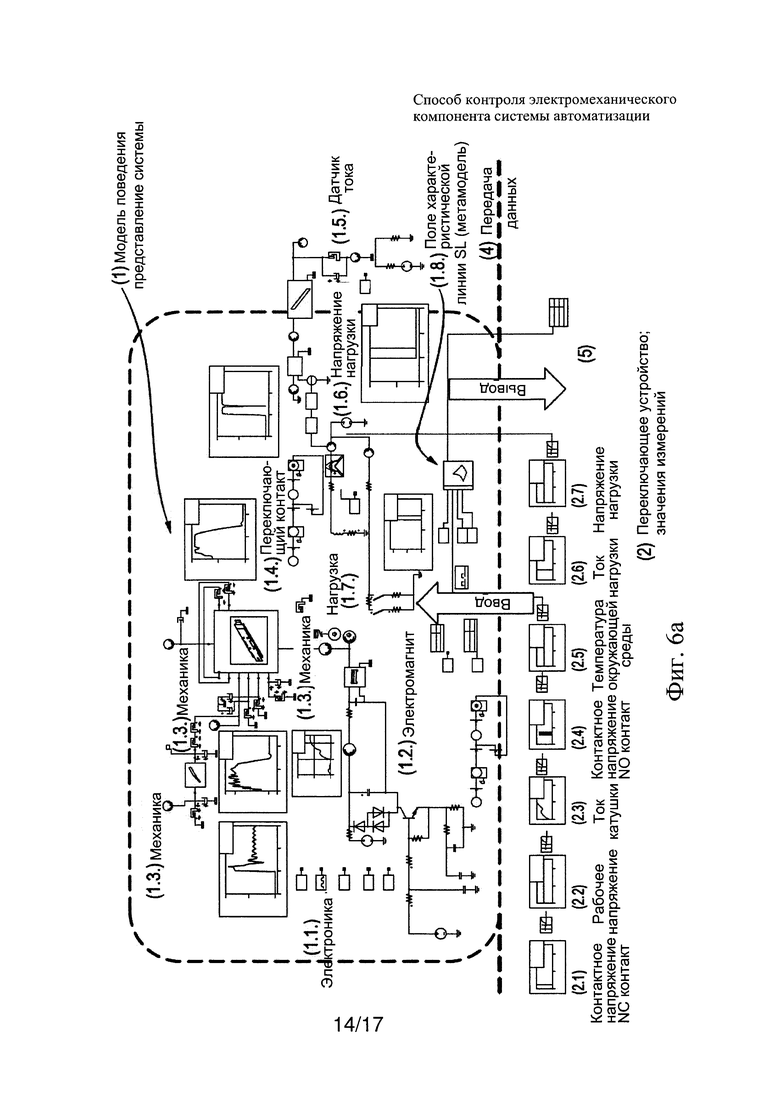
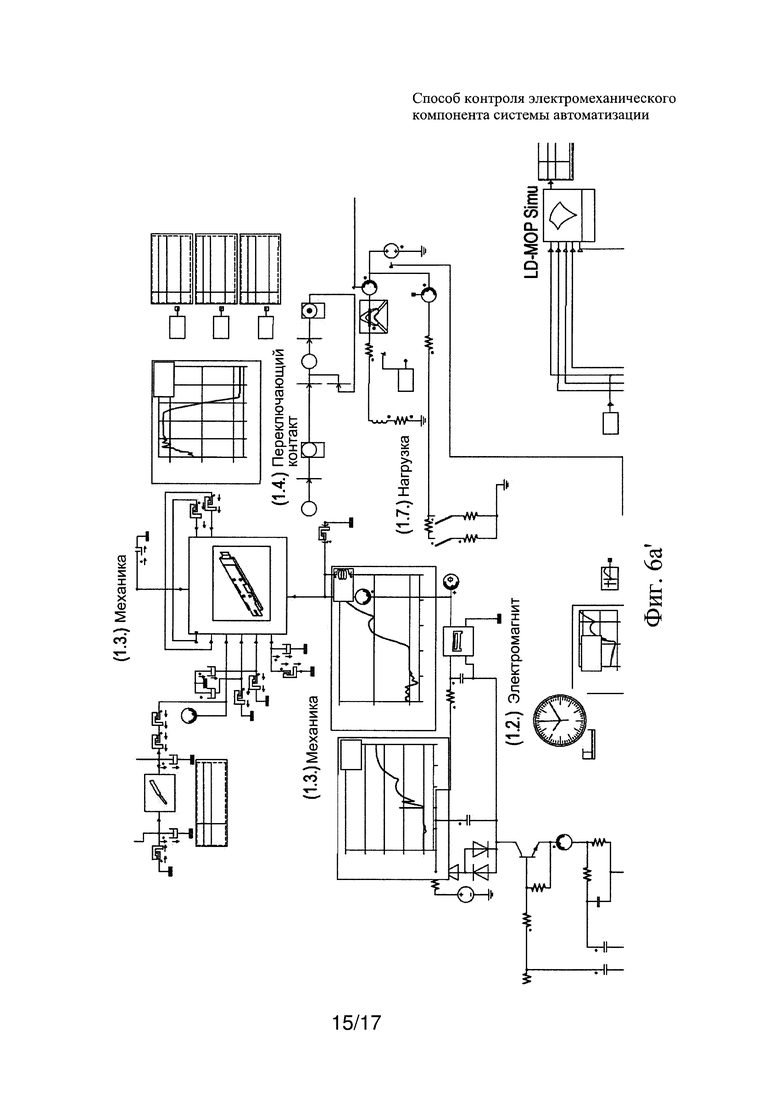
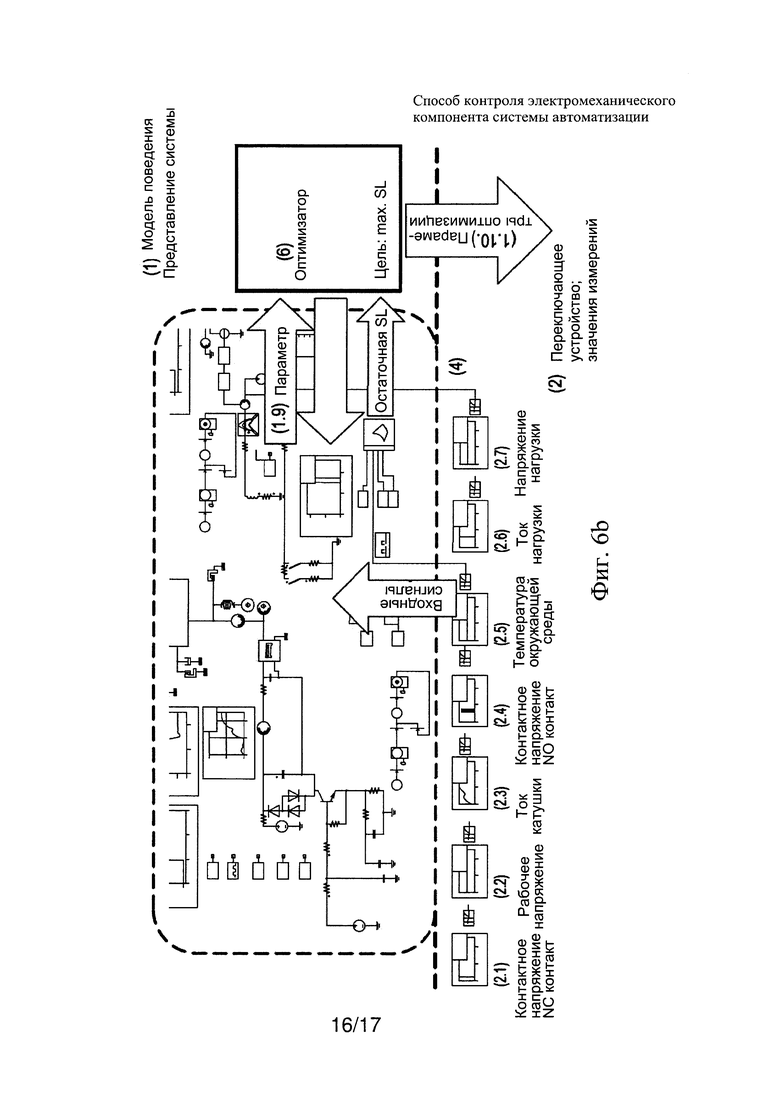
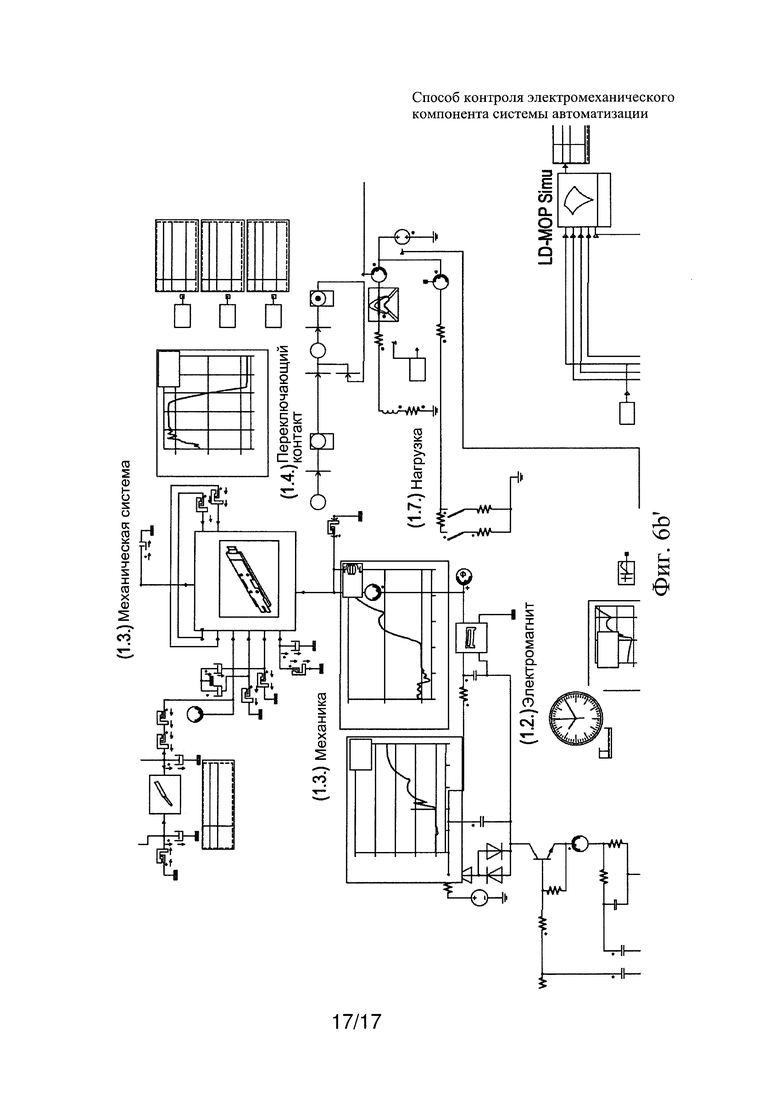
Фиг. 6а, фиг. 6а', фиг. 6b и фиг. 6b' представляют схематическое изображение модели поведения для определения многомерного поля характеристических линий. Модель физического поведения электромеханического компонента может создавать «цифрового двойника» электромеханического компонента. Модель поведения может быть реализована с помощью имитатора поведения и использована для определения многомерного поля характеристических линий.
Модель (1) поведения, в качестве представления системы, охватывает физические модели всех компонентов электрического компонента, таких как, например:
(1.1) Электроника (реле схемы управления, в том числе блок запроса на переключение);
(1.2) Электромагнит (реле магнитной системы);
(1.3) Механика (контактная пружина, реле с пружинами возврата в начальное состояние);
(1.4) Переключающий контакт (контактный резистор модели, реле переключающего контакта с электрической дугой);
(1.5) Датчик тока (ток нагрузки датчика);
(1.6) Напряжение нагрузки;
(1.7) Нагрузка (сопротивление, индуктивность, емкость); и
(1.8) Поле характеристических линий срока службы.
Для этой цели результаты испытаний и связанные с ними параметры могут быть представлены в замещающей модели или метамодели, подобно полю характеристических линий. При этом может оказаться полезным генерировать различные модели для разных типов нагрузки, например постоянного тока или переменного тока, а также для различных механизмов отказа, например контакта, который не открывается, как потенциально опасного сбоя, или контакта, который не закрывается. Генерация замещающей модели производится, например, с помощью способа на основе метамодели оптимального прогноза (Metamodel of Optimal Prognosis, MOP).
Переменные состояния включают в себя, например:
(2.1) Контактное напряжение нормально замкнутого контакта (NC-contact);
(2.2) Схема управления рабочим напряжением;
(2.3) Реле тока катушки;
(2.4) Контактное напряжение нормально открытого контакта (NO-contact) (контакт нагрузки);
(2.5) Температура окружающей среды;
(2.6) Ток нагрузки; и
(2.7) Напряжение нагрузки.
Теперь происходит моделирование поведения электромеханического компонента. Для этой цели, например, на основании моделирования получают внутренние параметры, которые не могут быть обнаружены с помощью измерительной техники, но которые могут быть релевантными для поведения (например, отказ/срок службы), например, избыточный ход контакта нагрузки или путь трения контакта нагрузки.
Кроме того, значения измерений, передаваемые в виде сигналов, преобразуются посредством математических операций, таких как, например, операции интегрирования, преобразования или дифференцирования, таким образом, что характеристические свойства сигналов могут быть представлены, например, коэффициентами. Эти коэффициенты могут быть представлены и обработаны аналогично нормальным параметрам.
Переданные значения измерений и параметры, определенные из них при моделировании, а также параметры, определенные с помощью модели поведения в имитационных моделях, например, обрабатываются в по меньшей мере одной метамодели для прогнозирования характеристик отказа, например оставшегося числа циклов переключения.
Переменные состояния или сами состояния выводятся и визуализируются. В случае явного сокращения ожидаемого остаточного срока службы или низкого остаточного срока службы можно избежать неожиданного сбоя, например посредством профилактического обслуживания. В случае оставшегося длительного срока службы запланированное техническое обслуживание может быть, например, отложено.
В другом применении активное воздействие или оптимизация электромеханического компонента происходит при изменении устанавливаемых параметров, таких как, например:
- рабочее напряжение;
- значение нагрузки ШИМ; или
- последовательность переключения в случае резервирования.
Для этой цели на уровне имитационной модели оптимизатор (6) может оптимизировать результаты моделирования, например остаточный срок службы, при изменении параметров (1.9) моделирования, например, значений характеристик реле, так что находят оптимальный набор (1.10) параметров, в котором, например, достигается наивысший возможный остаточный срок службы.
Все признаки, описанные и показанные в связи с отдельными вариантами осуществления, могут быть представлены в разных комбинациях, чтобы одновременно достичь полезных эффектов изобретения.
Список номеров позиций (на чертежах)
100 Способ контроля электромеханического компонента
101 Получение переменной механического состояния
103 Получение переменной электрического состояния
105 Определение состояния электромеханического компонента
200 Электромеханический компонент
201 Устройство получения
203 Память
205 Процессор
401 Компонент программно-аппаратного обеспечения
403 Компонент электроники
405 Компонент электромеханики
407 Компонент текучей среды
409 Интерфейс данных
411 Модуль программно-аппаратного обеспечения
413 Модуль электроники
415 Электромагнитный модуль
417 Модуль механики
419 Модуль метамодели
421 Объект
423 Объект
425 Объект

Изобретение относится к области технических средств автоматизации. Способ (100) контроля электромеханического компонента (200) автоматизированной системы включает получение (101) переменной механического состояния электромеханического компонента (200); получение (103) переменной электрического состояния электромеханического компонента (200); и определение (105) состояния электромеханического компонента (200) на основе многомерного поля характеристических линий с множеством состояний электромеханического компонента (200), причем переменная механического состояния и переменная электрического состояния связаны с каждым состоянием электромеханического компонента (200). 2 н. и 12 з.п. ф-лы, 6 ил.
1. Способ (100) контроля электромеханического компонента (200) автоматизированной системы, включающий:
получение (101) переменной механического состояния электромеханического компонента (200);
получение (103) переменной электрического состояния электромеханического компонента (200); и
определение (105) состояния электромеханического компонента (200) на основе многомерного поля характеристических линий с множеством состояний электромеханического компонента (200), причем переменная механического состояния и переменная электрического состояния связаны с каждым состоянием электромеханического компонента (200).
2. Способ (100) по п. 1, в котором в многомерном поле характеристических линий геометрический параметр связан с каждым состоянием электромеханического компонента (200), при этом способ также включает:
определение геометрического параметра электромеханического компонента (200); и
определение состояния электромеханического компонента (200) на основе многомерного поля характеристических линий, при этом определенное состояние связано с полученной переменной механического состояния, полученной переменной электрического состояния и геометрическим параметром.
3. Способ (100) по любому из предшествующих пунктов, в котором многомерное поле характеристических линий представлено значениями цифровых данных, в частности предварительно сохраненными значениями цифровых данных.
4. Способ (100) по любому из предшествующих пунктов, также включающий:
интерполяцию между опорными точками многомерного поля характеристических линий для определения состояния электромеханического компонента (200), при этом опорные точки задают переменными электрического состояния, переменными механического состояния и/или геометрическими параметрами.
5. Способ (100) по любому из предшествующих пунктов, также включающий:
определение многомерного поля характеристических линий на основе модели поведения электромеханического компонента (200), при этом модель поведения учитывает влияние полученной переменной механического состояния на полученную переменную электрического состояния.
6. Способ (100) по п. 5, в котором многомерное поле характеристических линий определяют путем выполнения моделирования поведения электромеханического компонента (200), при этом моделирование поведения реализует модель поведения.
7. Способ (100) по любому из предшествующих пунктов, также включающий отображение определенного состояния электромеханического компонента (200), в частности, с помощью устройства отображения.
8. Способ (100) по любому из предшествующих пунктов, также включающий генерирование управляющего сигнала для управления электромеханическим компонентом (200) в ответ на определенное состояние электромеханического компонента (200) и управление электромеханическим компонентом (200) с помощью генерированного управляющего сигнала.
9. Способ (100) по любому из предшествующих пунктов, в котором переменную механического состояния и переменную электрического состояния получают электромеханическим компонентом (200).
10. Способ (100) по любому из предшествующих пунктов, в котором переменная механического состояния представляет собой одну из следующих переменных механического состояния: дребезг контакта электромеханического компонента (200), длительность дребезга при дребезге контакта электромеханического компонента (200), число отскоков для дребезга контакта электромеханического компонента (200), температура элемента электромеханического компонента (200), температура окружающей среды электромеханического компонента (200), скорость движения элемента электромеханического компонента (200), в частности якоря, усилия контакта или усилия разъединения контакта электромеханического компонента (200).
11. Способ (100) по любому из предшествующих пунктов, в котором переменная электрического состояния представляет собой ток через электромеханический компонент (200) или напряжение электромеханического компонента (200).
12. Способ (100) по любому из предшествующих пунктов, в котором определенное состояние электромеханического компонента (200) представляет собой срок службы электромеханического компонента (200).
13. Способ (100) по любому из предшествующих пунктов, в котором электромеханический компонент (200) является электромеханическим переключателем, в частности реле.
14. Электромеханический компонент (200), включающий:
устройство (201) получения, выполненное с возможностью получать переменную механического состояния электромеханического компонента (200) и переменную электрического состояния электромеханического компонента (200),
память (203), в которой хранится многомерное поле характеристических линий с множеством состояний электромеханического компонента (200), при этом переменная механического состояния и переменная электрического состояния связаны с каждым состоянием электромеханического компонента (200); и
процессор (205), выполненный с возможностью определять состояние электромеханического компонента (200) на основе многомерного поля характеристических линий.
| DE 112005001085 B4, 23.01.2014 | |||
| US 2015276877 A1, 01.10.2015 | |||
| DE 102010040426 A1, 14.04.2011 | |||
| Способ корректировки состава электролита алюминиевых электролизеров фтористыми солями | 1961 |
|
SU146951A1 |

