Изобретение относится к способу для контроля работы по меньшей мере одного компонента привода.
Кроме того, изобретение относится к системе для контроля работы по меньшей мере одного компонента привода.
Кроме того, изобретение относится к компьютерной программе для осуществления подобного способа при выполнении в центральной IT-инфраструктуре.
Кроме того, изобретение относится к компьютерному программному продукту с подобной компьютерной программой.
В рамках оцифровки и применения, в частности, облачных открытых IoT-систем (IoT - Интернет вещей), данные принимаются и сохраняются разнообразными компонентами. Данные для соответствующих компонентов упорядочены, например, в форме списков. Подобная компоновка не отражает функциональной взаимосвязи.
В частности, для приводных технических систем, рациональным является функциональное связывание данных компонентов приводного механизма, чтобы быстро и надежно определять измеренные значения, диагностику неисправности и функциональные взаимосвязи, например, проблем или неисправностей. Незамедлительная и детальная сопоставимость измеренных данных повышает эффективность диагностики и способствует распознаванию корреляций между неисправностями отдельных компонентов в системе в целом.
Выложенная заявка EP 3 322 088 A1 описывает способ для контроля работы электрической вращающейся машины с ротором, статором и машинным корпусом, в котором расположены ротор и статор. Чтобы обеспечить возможность выполнения способа без конструктивных изменений в электрической вращающейся машине, предложено, что снаружи машинного корпуса осуществляется измерение первого физического параметра статора и второго физического параметра ротора, причем из первого физического параметра и второго физического параметра определяется по меньшей мере один параметр состояния электрической вращающейся машины.
Выложенная заявка EP 3 118 605 A1 описывает способ для контроля системы подшипников, в частности, электрической машины, которая содержит участок вала. Регистрируют приложенный к участку вала первый крутящий момент и отбираемый от участка вала второй крутящий момент. Формируют разность первого крутящего момента и второго крутящего момента и идентифицируют неисправность, если разность больше, чем первое граничное значение.
Выложенная заявка US 2018/0106261 A1 описывает способ, который содержит следующие этапы: выявление, имеет ли компрессор неисправность, с применением моделирования на основе рабочих характеристик и моделирования на конструктивной основе физических аспектов, которые взаимосвязаны с работой компрессора; диагностирование каждой выявленной неисправности, чтобы определить причину или причины неисправности; и оценивание каждой диагностированной неисправности, чтобы судить о значимости неисправности.
Выложенная заявка US 2012/0239348 A1 описывает способ для контроля работоспособности механического приводного механизма. Способ содержит получение сигналов напряжения и тока от по меньшей мере одной фазы электрической машины, которая связана с механическим приводным механизмом. Способ также содержит представление электрической машины, которая имеет несинусоидальное распределение потока, как комбинацию нескольких соответствующих гармоническому порядку с синусоидальным распределением виртуальных электрических машин на основе полученных сигналов напряжения и тока. Способ также содержит определение профиля крутящего момента, который соотнесен с одной или несколькими комбинациями синусоидально распределенных виртуальных электрических машин. Наконец, способ содержит выявление присутствия аномалии в механическом приводном механизме на основе профиля или спектра крутящего момента.
В основе изобретения лежит задача предложить способ для контроля работы по меньшей мере одного компонента привода, который обеспечивает улучшение быстродействия и надежности.
Указанная задача решается способом для контроля работы по меньшей мере одного компонента привода, причем данные, которые относятся к по меньшей мере по меньшей мере одному компоненту привода и/или работе по меньшей мере одного компонента привода, передаются на центральную IT-инфраструктуру, причем переданные данные в центральной IT-инфраструктуре соотносятся с моделью по меньшей мере одного компонента привода, причем с моделью по меньшей мере одного компонента привода соотносится модель по меньшей мере одного виртуального компонента, причем модель виртуального компонента моделирует (воспроизводит) технические характеристики компонента, который электрически или механически связан с компонентом привода, причем с помощью корреляции моделей определяется рабочее состояние компонента привода.
Задача, кроме того, решается системой для контроля работы по меньшей мере одного компонента привода, которая содержит устройство для передачи данных, которые относятся к по меньшей мере одному компоненту привода и/или работе по меньшей мере одного компонента привода, на центральную IT-инфраструктуру, модель по меньшей мере одного компонента привода в центральной IT-инфраструктуре, с которой соотнесены переданные данные по меньшей мере одного компонента привода, модель по меньшей мере одного виртуального компонента, которая соотнесена с моделью по меньшей мере одного компонента привода, причем модель виртуального компонента моделирует технические характеристики компонента, который электрически или механически связан с компонентом привода, и блок оценки, который предусмотрен для того, чтобы с помощью корреляции моделей определять рабочее состояние компонента привода.
Задача также решается компьютерной программой для осуществления подобного способа при выполнении в центральной IT-инфраструктуре.
Задача, кроме того, решается компьютерным программным продуктом с подобной компьютерной программой.
Преимущества и предпочтительные варианты осуществления, описанные далее в отношении способа, могут быть соответственно отнесены к системе, компьютерной программе и компьютерному программному продукту.
В основе изобретения лежит идея о том, чтобы данные, которые относятся к по меньшей мере одному компоненту привода в системе привода и/или к работе по меньшей мере одного компонента привода, по возможности быстро и надежно интерпретировать, для чего данные передаются на центральную IT-инфраструктуру и там соотносятся с соответствующей моделью. Система привода содержит, например, по меньшей мере одну систему защиты, предохранитель, трансформатор, фильтр, преобразователь частоты, мотор, передаточный механизм и/или нагрузку. Центральная IT-инфраструктура представляет собой, например, локальную компьютерную систему и/или по меньшей мере одну, в частности, облачную открытую IoT-систему. Центральная IT-инфраструктура предоставляет пространство хранения, вычислительную мощность и/или программное обеспечение приложений. В IoT-системе, пространство хранения, вычислительная мощность и/или программное обеспечение приложений предоставляются в распоряжение через Интернет в качестве услуг. Соответствующая модель отображает, в частности, технические характеристики (поведение) компонента привода. Кроме того, с моделью по меньшей мере одного компонента привода соотносится модель по меньшей мере одного виртуального компонента. Путем соотнесения устанавливается функциональное связывание между моделями. В частности, модель виртуального компонента моделирует (имитирует, воспроизводит) техническое поведение компонента, который электрически или механически связан с компонентом привода. Модель виртуального компонента соотносится, например, пользователем или автоматически. Например, компонентом привода является генератор, и модель виртуального компонента отображает поведение турбины. С помощью корреляции моделей определяется рабочее состояние компонента привода. Посредством функционального связывания моделей и корреляции улучшается надежность при диагностике неисправностей и сокращается время реакции на возникающие неисправности. Кроме того, упрощается техническое обслуживание по меньшей мере одного компонента привода.
В предпочтительной форме выполнения, данные, которые относятся к по меньшей мере одному компоненту привода, содержат индивидуальную идентификацию продукта. Индивидуальная идентификация продукта представляет собой, например, серийный номер, который идентифицирует не только тип продукта, но и возможно индивидуализированное выполнение типа продукта. Посредством индивидуальной идентификации продукта, в центральной IT-инфраструктуре, модель соответствующего компонента привода может сохраняться по меньшей мере с одним индивидуализированным техническим параметром, так что компонент привода может быть очень точно смоделирован посредством модели.
Особенно предпочтительным образом, модель по меньшей мере одного компонента привода автоматически соотносится на основе индивидуальной идентификации продукта. Например, модель в базе данных однозначно соотнесена с серийным номером. Посредством автоматического соотнесения ускоряется обработка данных и повышается удобство обслуживания.
В другом предпочтительном варианте осуществления, при определении рабочего состояния компонента привода применяется по меньшей мере одна характеристическая (параметрическая) кривая. Характеристическая кривая соотнесена с моделью компонента привода и/или моделью по меньшей мере одного другого, в частности, виртуального компонента. В частности, характеристическая кривая отображает технические свойства компонента привода в зависимости от по меньшей мере одного параметра. Например, для асинхронной машины используется характеристическая кривая числа оборотов-крутящего момента. Опционально, применяется семейство характеристических кривых, которое отображает многомерную параметрическую зависимость. За счет применения характеристических кривых можно быстро и надежно определять сложные технические характеристики компонента.
В предпочтительной форме выполнения, по меньшей мере часть данных, которые относятся к работе по меньшей мере одного компонента привода, определяются по меньшей мере одним датчиком. За счет применения датчиков улучшается надежность контроля по меньшей мере одного компонента привода в системе привода. В частности, облегчается диагностика неисправностей.
Особенно предпочтительным образом, по меньшей мере одним датчиком измеряется температура, колебание (вибрация) и/или магнитное поле. Подобные сенсорные средства могут применяться без конструктивных изменений компонента привода и обеспечивают возможность надежного и точного измерения.
В предпочтительном варианте осуществления, на основе данных по меньшей мере одного датчика определяется фактическое значение для по меньшей мере одного рабочего параметра, причем на основе корреляции моделей определяется заданное значение для по меньшей мере одного рабочего параметра, причем из заданного значения и фактического значения по меньшей мере одного рабочего параметра определяется рабочее состояние компонента привода. За счет корреляции функционально взаимосвязанных моделей с привлечением измеренных данных датчиков улучшается надежность контроля работы компонента привода.
Особенно предпочтительным образом, рабочее состояние компонента привода определяется с помощью по меньшей мере одной операции сравнения. Например, по меньшей мере одно заданное значение и фактическое значение сравниваются между собой для определения рабочего состояния. Подобная операция сравнения может быть реализована простым способом, причем неисправное рабочее состояние может быть установлено быстро и надежно.
В другом предпочтительном варианте осуществления, по меньшей мере один компонент привода выполнен как электрическая вращающаяся машина, причем данные, которые относятся к работе по меньшей мере одной электрической вращающейся машины, включают в себя по меньшей мере число оборотов и/или крутящий момент. Число оборотов и/или крутящий момент проявили себя как простые и надежные параметры, чтобы характеризовать работу электрической вращающейся машины.
В другой предпочтительной форме выполнения, по меньшей мере один компонент привода выполнен как преобразователь частоты (к работе по меньшей мере одного преобразователя частоты, включают в себя по меньшей мере напряжение промежуточного контура и/или входной ток преобразователя частоты. Напряжение промежуточного контура и/или входной ток оказались простыми и надежными параметрами, чтобы характеризовать работу преобразователя частоты.
Особенно предпочтительным образом, данные считываются по меньшей мере частично из оптически считываемого кода. Оптически считываемый код представляет собой, например, штрих-код, QR-код или код матричных данных. Подобные оптически считываемые коды могут просто и быстро считываться.
В предпочтительной форме выполнения, данные по меньшей мере частично передаются через сетевой интерфейс на центральную IT-инфраструктуру. Например, передача данных осуществляется посредством Ethernet-интерфейса или беспроводным способом через Wi-Fi. Передача данных через сетевой интерфейс является простой и надежной.
В другом предпочтительном варианте осуществления, по меньшей мере один параметр, характеризующий рабочее состояние компонента привода, представляется графически. За счет графического представления улучшается наглядность, так что время реакции при возникающих неисправностях сокращается.
Далее изобретение описывается и поясняется более подробно с помощью примеров выполнения, представленных на чертежах, где показано следующее:
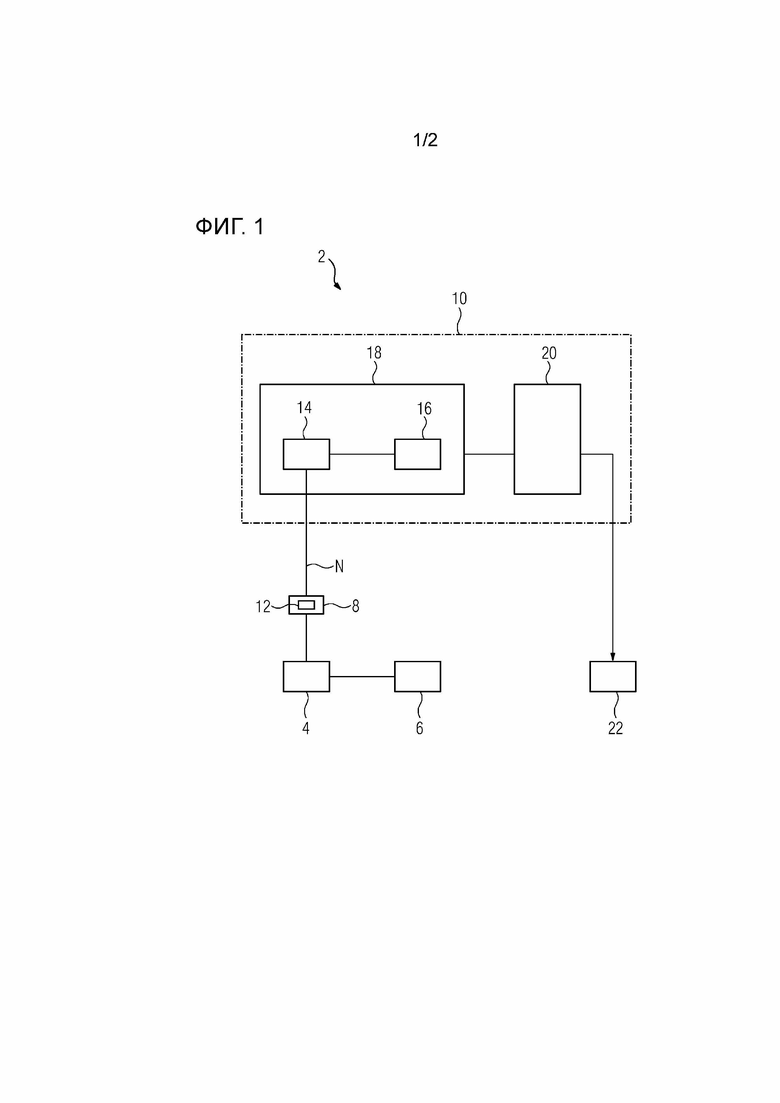
Фиг. 1 - блок-схема первой формы выполнения системы для контроля работы компонента привода и
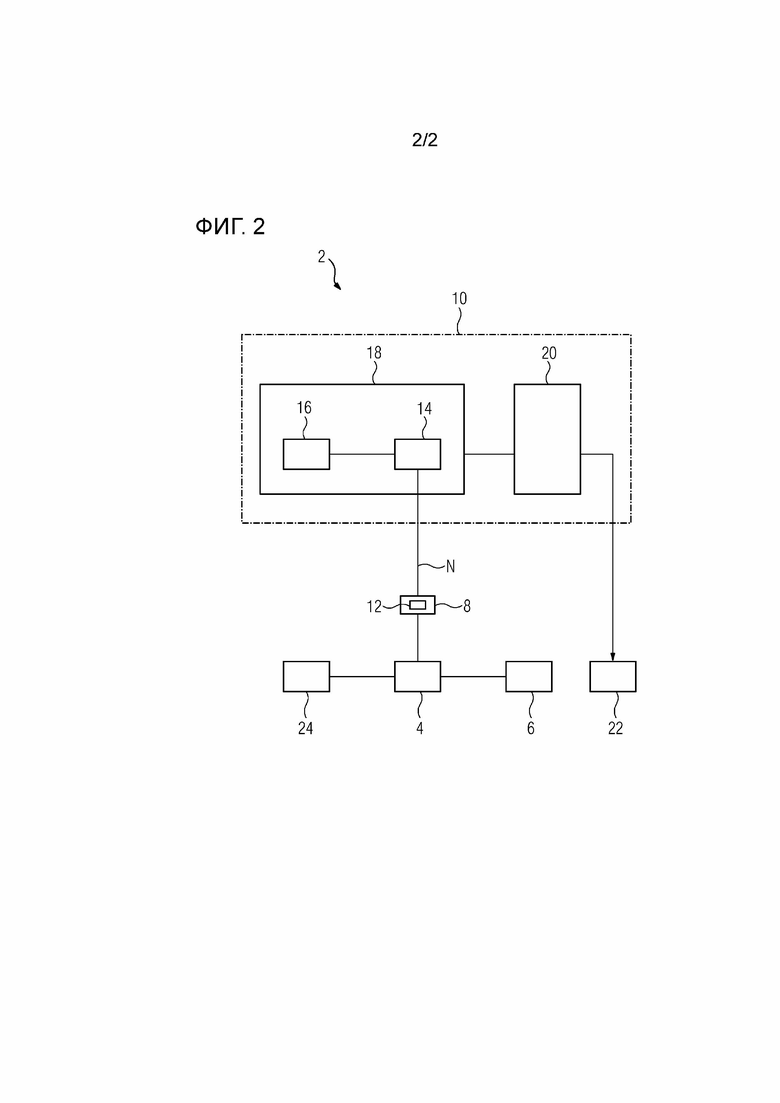
Фиг. 2 - блок-схема второй формы выполнения системы для контроля работы компонента привода.
Обсуждаемые далее примеры выполнения представляют собой предпочтительные формы выполнения изобретения. В примерах выполнения, описанные компоненты форм выполнения представляют, соответственно, отдельные, рассматриваемые независимо друг от друга признаки изобретения, которые соответственно развивают изобретение также независимо друг от друга и поэтому также должны рассматриваться в отдельности или в иной, чем показанная, комбинации как составная часть изобретения. Кроме того, описанные формы выполнения также могут дополняться другими из уже описанных признаков изобретения.
Одинаковые ссылочные позиции имеют на различных чертежах одинаковое значение.
Фиг. 1 показывает блок-схему системы 2 для контроля работы компонента 4 привода. Компонент 4 привода выполнен как мотор, который соединен с нагрузочным устройством 6, которое выполнено в виде насоса, и применяется для приведения в действие нагрузочного устройства 6.
Компонент 4 привода содержит устройство 8, которое передает данные, которые относятся к компоненту 4 привода и/или работе компонента 4 привода, на центральную IT-инфраструктуру 10. Подобное устройство 8 представляет собой, например, сенсорный блок, который предоставляет зарегистрированные сенсорным блоком данные, в частности, центральной IT-инфраструктуре 10 через коммуникационный интерфейс. Центральная IT-инфраструктура 10 представляет собой, например, по меньшей мере одну локальную компьютерную систему и/или по меньшей мере одну, в частности, облачную открытую IoT-систему. Центральная IT-инфраструктура 10 предоставляет пространство хранения, вычислительную мощность и/или программное обеспечение приложений. В IoT-системе, пространство хранения, вычислительная мощность и/или программное обеспечение приложений предоставляются в распоряжение в качестве услуг через Интернет. Данные, которые относятся к компоненту 4 привода, включают в себя индивидуальную идентификацию продукта, например, серийный номер. Дополнительно, данные, которые относятся к работе компонента 4 привода, включают в себя сенсорные данные, которые определяются по меньшей мере одним датчиком 12. Датчик 12 выполнен как датчик температуры, датчик колебаний и/или как датчик магнитного поля. В частности, с помощью датчика колебаний регистрируется вибрация, которая сдержит зависимые от числа оборотов ротора частотные составляющие, так что с помощью данных вибрации можно, например, определить число оборотов ротора. Датчик магнитного поля регистрирует, например, частоту статора и/или частоту проскальзывания.
Данные по меньшей мере частично передаются через сетевой интерфейс N на центральную IT-инфраструктуру 10. Например, передача данных осуществляется через Ethernet-интерфейс или беспроводным способом через Wi-Fi. Опционально, по меньшей мере часть данных, например, серийный номер компонента 4 привода считывается с помощью считывающего устройства из оптически считываемого кода. Оптически считываемый код представляет собой, например, штрих-код, QR-код или код матричных данных, причем считывающее устройство представляет собой, например, смартфон или планшет с камерой. Опционально, оптически считываемый код включает в себя по меньшей мере часть сенсорных данных и изменяется динамически, так что часть сенсорных данных оптически считываемого кода посредством считывающего устройства передается на центральную IT-инфраструктуру 10. Динамически изменяемый код может отображаться на дисплее или на электронной бумаге.
В центральной IT-инфраструктуре 10, на основе переданного серийного номера, с компонентом 4 привода, в частности, автоматически, соотносится модель 14, причем серийный номер определяет индивидуальную модель 14. Индивидуальная модель 14 компонента 4 привода представляет собой модель 14, которая соотнесена с этим специальным серийным номером и имеет по меньшей мере один индивидуализированный технический параметр, как, например, диапазон рабочей мощности.
С моделью 14 компонента 4 привода соотносится модель 16 виртуального компонента, причем виртуальный компонент отображает технические характеристики нагрузочного устройства 6. Модели 14, 16 сохранены в базе данных 18 моделей в центральной IT-инфраструктуре 10 и могут извлекаться оттуда. Например, модель 16 виртуального компонента включает в себя по меньшей мере одну характеристическую кривую насоса для нагрузочного устройства 6, выполненного как насос. Модель 16 виртуального компонента опционально включает в себя диапазон допусков, соотнесенный по меньшей мере с одной характеристической кривой насоса. Соотнесение виртуального компонента осуществляется, например, вручную пользователем или осуществляется автоматически, например, на основе сохраненных в центральной IT-инфраструктуре 10 данных для серийного номера.
С помощью сенсорных данных определяется фактическое значение для по меньшей мере одного рабочего параметра компонента 4 привода. Например, из данных вибрации, определенных датчиком колебаний, и из данных поля, определенных датчиком магнитного поля, определяется число оборотов компонента 4 привода, выполненного в виде мотора, а также крутящий момент.
Кроме того, для по меньшей мере одного рабочего параметра компонента 4 привода определяется заданное значение из корреляции модели 14 компонента 4 привода и модели 16 виртуального компонента. Например, выполняется корреляция требуемого крутящего момента насоса в зависимости от числа оборотов с характеристической кривой числа оборотов-крутящего момента мотора, чтобы получить заданное значение для рабочей точки.
В блоке 20 оценки из фактического значения и заданного значения по меньшей мере одного рабочего параметра компонента 4 привода определяется рабочее состояние. Определение рабочего состояния осуществляется, например, с помощью по меньшей мере одной операции сравнения. Рабочее состояние выдается на блок 22 вывода. Блок 22 вывода представляет собой, например, дисплей. Например, выводится, работает ли мотор в допустимом для насоса рабочем состоянии. Если нет, то выдается сообщение о неисправности. Опционально, по меньшей мере один параметр, характерный для рабочего состояния компонента 4 привода, представляется графически. Например, характеристика крутящего момента и/или числа оборотов представляется графически на дисплее. Дополнительно или альтернативно, рабочее состояние представляется акустически или кодируется в цвете посредством по меньшей мере одного LED.
Фиг. 2 показывает блок-схему второй формы выполнения системы 2 для контроля работы компонента 4 привода, причем компонент 4 привода выполнен как преобразователь частоты, который запитывается через сетевой трансформатор 24 применяется для электроснабжения нагрузочного устройства 6. Нагрузочное устройство представляет собой, например, мотор. Выполненный как преобразователь частоты компонент 4 привода содержит, как на фиг. 1, устройство 8, которое передает данные, которые относятся к компоненту 4 привода и/или работе компонента 4 привода, на центральную IT-инфраструктуру 10. Данные, которые относятся к компоненту 4 привода, включают в себя индивидуальную идентификацию продукта, например, серийный номер. Дополнительно, данные, которые относятся к работе компонента 4 привода, включают в себя сенсорные данные, которые определяются по меньшей мере одним датчиком 12. Датчик 12 выполнен как устройство измерения напряжения и/или устройство измерения частоты. Как и в случае фиг. 1, данные по меньшей мере частично передаются на центральную IT-инфраструктуру 10 через сетевой интерфейс N.
В центральной IT-инфраструктуре 10, на основе переданного серийного номера осуществляется, в частности, автоматически, соотнесение модели 14 преобразователя частоты, при этом посредством серийного номера определяется индивидуальная модель 14.
С моделью 14 преобразователя частоты соотносится модель 16 виртуального компонента, при этом виртуальный компонент отображает технические параметры сетевого трансформатора 24, такие как, в частности, комплексный коэффициент трансформации и/или, в частности, зависимый от выходного тока коэффициент полезного действия. Соотнесение виртуального компонента осуществляется, например, вручную пользователем или автоматически, например, на основе сохраненных в центральной IT-инфраструктуре 10 данных для серийного номера.
С помощью сенсорных данных определяется фактическое значение для по меньшей мере одного рабочего параметра компонента 4 привода, выполненного как преобразователь частоты. Например, определяется фактическое значение для по меньшей мере одной нагрузочной точки из напряжения промежуточного контура и входного тока преобразователя частоты.
Кроме того, для по меньшей мере одного рабочего параметра компонента 4 привода, выполненного как преобразователь частоты, определяется заданное значение из корреляции модели 14 компонента 4 привода и модели 16 виртуального компонента. Например, определяется заданное значение для по меньшей мере одной нагрузочной точки на основе параметров модели для модели 14 преобразователя и модели 16 сетевого трансформатора 24.
В блоке 20 оценки из фактического значения и заданного значения определяется рабочее состояние. Рабочее состояние выводится на блоке 22 вывода. Например, выводится, работает ли преобразователь частоты исправным образом, и/или имеет место аномалия сетевого трансформатора 24. Если это имеет место, то, например, выдается сообщение о неисправности. В остальном выполнение системы 2 согласно фиг. 2 соответствует показанному на фиг. 1.
Таким образом, изобретение относится к способу для контроля работы по меньшей мере одного компонента 4 привода. Для того чтобы улучшить быстродействие и надежность контроля, предложено, что данные, которые относятся к по меньшей мере одному компоненту 4 привода и/или работе по меньшей мере одного компонента 4 привода, передаются на центральную IT-инфраструктуру 10, причем переданные данные в центральной IT-инфраструктуре 10 соотносятся с моделью 14 по меньшей мере одного компонента 4 привода, при этом с моделью 14 по меньшей мере одного компонента 4 привода соотносится модель 16 по меньшей мере одного виртуального компонента, причем с помощью корреляции моделей 14, 16 определяется рабочее состояние компонента 4 привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕЛЛЕКТУАЛЬНАЯ СЕТЬ | 2011 |
|
RU2546320C2 |
| ОБНАРУЖЕНИЕ И АНАЛИЗ ЗЛОУМЫШЛЕННОЙ АТАКИ | 2011 |
|
RU2583703C2 |
| СПОСОБЫ И СИСТЕМЫ ДЛЯ ОСНОВАННОЙ НА ТОКЕНАХ ПРИВЯЗКИ ФИЗИЧЕСКИХ ОБЪЕКТОВ В СРЕДЕ РАСПРЕДЕЛЕННОГО РЕЕСТРА | 2020 |
|
RU2809976C2 |
| ОБУСЛОВЛЕННОЕ ОКРУЖАЮЩЕЙ СРЕДОЙ УПРАВЛЕНИЕ ДОСТУПОМ | 2014 |
|
RU2679983C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ, КОМПОНЕНТЫ И МОБИЛЬНОЕ СЕРВИСНОЕ УСТРОЙСТВО ДЛЯ HVAC-СИСТЕМЫ | 2014 |
|
RU2653926C2 |
| СПОСОБ ПЕРЕРАБОТКИ ПО МЕНЬШЕЙ МЕРЕ ОДНОГО КОММУТАЦИОННОГО ШКАФА | 2019 |
|
RU2754581C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБРАБОТКИ ЦЕННЫХ ДОКУМЕНТОВ | 2014 |
|
RU2668046C2 |
| ФОРМИРОВАНИЕ БИНАУРАЛЬНЫХ СИГНАЛОВ | 2009 |
|
RU2505941C2 |
| ГРУППА УЗЛОВ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ ГЕНЕРАЦИИ ЖИЗНЕННОГО ЦИКЛА МАШИННОГО КОМПОНЕНТА, А ТАКЖЕ СПОСОБ ОБСЛУЖИВАНИЯ ДЛЯ ТЕХНИЧЕСКОГО ОБСЛУЖИВАНИЯ | 2016 |
|
RU2682371C1 |
| МОНИТОРИНГ ЭЛЕМЕНТОВ ИНФРАСТРУКТУРЫ ПОСРЕДСТВОМ ГЕО-КЛАСТЕРИЗАЦИИ | 2017 |
|
RU2722370C1 |
Изобретение относится к области использования облачных открытых IoT-систем для контроля работы привода. Техническим результатом является увеличение быстродействия системы контроля привода. Технический результат заявляемого решения достигается за счет того, что данные с компонента привода передают на центральную IT-инфраструктуру и осуществляют автоматическое соотнесение внутри центральной IT-инфраструктуры первой модели компонента привода на основании данных, которые относятся к индивидуальной идентификации продукта компонента привода, а также автоматическое соотнесение с первой моделью внутри центральной IT-инфраструктуры второй модели виртуального компонента на основании данных, которые относятся к индивидуальной идентификации продукта компонента привода, и с помощью корреляции двух моделей определяют рабочее состояние компонента привода. 2 н. и 13 з.п. ф-лы, 2 ил.
1. Способ для контроля работы по меньшей мере одного компонента (4) привода, содержащий
передачу данных, которые относятся к индивидуальной идентификации продукта по меньшей мере одного компонента (4) привода и/или данных, которые относятся к работе упомянутого по меньшей мере одного компонента (4) привода, определенных по меньшей мере одним датчиком (12), на центральную IT-инфраструктуру (10),
автоматическое соотнесение внутри центральной IT-инфраструктуры (10) первой модели (14) упомянутого по меньшей мере одного компонента (4) привода на основании данных, которые относятся к индивидуальной идентификации продукта по меньшей мере одного компонента (4) привода,
автоматическое соотнесение с первой моделью внутри центральной IT-инфраструктуры (10) второй модели (16) по меньшей мере одного виртуального компонента на основании данных, которые относятся к индивидуальной идентификации продукта по меньшей мере одного компонента (4) привода, причем вторая модель моделирует технические характеристики компонента, который электрически или механически соединен с компонентом (4) привода,
определение из данных по меньшей мере одного датчика (12) фактического значения по меньшей мере одного рабочего параметра,
определение заданного значения для упомянутого по меньшей мере одного рабочего параметра на основе корреляции первой (14) и второй (16) моделей,
определение посредством проведения по меньшей мере одной операции сравнения рабочего состояния компонента (4) привода из заданного значения и фактического значения упомянутого по меньшей мере одного рабочего параметра.
2. Способ по п.1, дополнительно содержащий определение рабочего состояния компонента (4) привода из по меньшей мере одной характеристической кривой.
3. Способ по п.1, в котором данные, которые относятся к работе упомянутого по меньшей мере одного компонента (4) включают температуру, колебание и/или магнитное поле или их комбинацию.
4. Способ по п.1,
в котором по меньшей мере один компонент (4) привода выполнен как электрическая вращающаяся машина,
причем данные, которые относятся к работе по меньшей мере одной электрической вращающейся машины, включают в себя данные, выбранные из числа оборотов и/или крутящего момента.
5. Способ по п.1, в котором
по меньшей мере один компонент (4) привода выполнен как преобразователь частоты,
причем данные, которые относятся к работе упомянутого по меньшей мере одного преобразователя частоты, включают в себя данные, выбранные из напряжения промежуточного контура и входного тока преобразователя частоты.
6. Способ по п.1, в котором данные считывают по меньшей мере частично из оптически считываемого кода.
7. Способ по п.1, в котором данные по меньшей мере частично передают через сетевой интерфейс (N) на центральную IT-инфраструктуру (10).
8. Способ по п.1, в котором представляют графически по меньшей мере один параметр, характеризующий рабочее состояние компонента (4) привода.
9. Система (2) для контроля работы по меньшей мере одного компонента (4) привода, содержащая
- устройство (8) для передачи данных, которые относятся к индивидуальной идентификации продукта упомянутого по меньшей мере одного компонента (4) привода и/или относятся к работе упомянутого по меньшей мере одного компонента (4) привода, определенных по меньшей мере одним датчиком (12), на центральную IT-инфраструктуру (10),
- первую модель (14) упомянутого по меньшей мере одного компонента (4) привода, автоматически соотнесенную внутри центральной IT-инфраструктуры (10), на основании данных, которые относятся к индивидуальной идентификации продукта по меньшей мере одного компонента (4) привода,
- вторую модель (16) по меньшей мере одного виртуального компонента, которая автоматически соотнесена с первой моделью (14) на основании данных, которые относятся к индивидуальной идентификации продукта по меньшей мере одного компонента (4) привода, причем вторая модель моделирует технические характеристики компонента, который электрически или механически соединен с компонентом (4) привода, и
- блок (20) оценки, который предусмотрен для
определения из данных по меньшей мере одного датчика (12) фактического значения по меньшей мере одного рабочего параметра,
определения заданного значения для упомянутого по меньшей мере одного рабочего параметра на основе корреляции первой (14) и второй (16) моделей,
определения посредством проведения по меньшей мере одной операции сравнения рабочего состояния компонента (4) привода из заданного значения и фактического значения упомянутого по меньшей мере одного рабочего параметра.
10. Система по п.9, причем по меньшей мере одна из первой (14) и второй (16) моделей включает в себя характеристическую кривую.
11. Система по п.9, причем упомянутый по меньшей мере один датчик (12) выполнен как датчик температуры, датчик колебаний и/или как датчик магнитного поля, или их комбинация.
12. Система по п.9,
причем по меньшей мере один компонент (4) привода выполнен как электрическая вращающаяся машина,
причем данные, которые относятся к работе упомянутой по меньшей мере одной электрической вращающейся машины, включают в себя данные, выбранные из числа оборотов и крутящего момента.
13. Система по п.9,
причем по меньшей мере один компонент (4) привода выполнен как преобразователь частоты,
причем данные, которые относятся к работе упомянутого по меньшей мере одного преобразователя частоты, включают в себя данные, выбранные из напряжения промежуточного контура и входного тока преобразователя частоты.
14. Система по п.9,
причем по меньшей мере один компонент (4) привода содержит оптически считываемый код, который содержит по меньшей мере часть передаваемых данных.
15. Система по п.9, содержащая сетевой интерфейс (N), через который по меньшей мере часть данных может передаваться на центральную IT-инфраструктуру (10).
| EP 3118605 A1, 18.01.2017 | |||
| Способ получения цианистых соединений | 1924 |
|
SU2018A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |
| ДОВГАЛЬ В.А | |||
| и др.: "Проблемы и задачи безопасности интеллектуальных сетей, основанных на Интернете Вещей", "Вестник АГУ", выпуск 4 (211), 2017. | |||

