ОБЛАСТЬ ТЕХНИКИ
Изобретение относится к области вычислительной техники, в частности, к управлению устройствами, а точнее управлению устройствами посредством обработки электрических сигналов, возникающих в мышцах человека.
УРОВЕНЬ ТЕХНИКИ
Из уровня техники известно устройство с интерфейсом и способ для управления устройствами (см. US 20130096453, опубл. 18 апреля 2013 года), в которых описывается возможность управления устройствами. Недостатками такого способа и устройства являются необходимость использования сенсоров для регистрации сигналов мозга пользователя и использование нейрокомпьютерного интерфейса.
Также из уровня техники известен способ и устройство управления роботом с использованием сенсора электромиограммы и сенсора ускорения (см. US 20120221177, опубл. 30 августа 2012 года), который позволяет управлять роботом с использованием сенсора электромиограммы. Недостатками такого способа является необходимость использования в управляемом устройстве сенсора ускорения, а также необходимость сравнения показаний сенсора электромиограммы с ранее сохраненными данными сенсора электромиограммы, а также необходимость сравнения показаний сенсора ускорения с ранее сохраненными данными сенсора ускорения.
СУЩНОСТЬ ТЕХНИЧЕСКОГО РЕШЕНИЯ
Технический результат, достигаемый предлагаемым изобретением, состоит в повышении точности и скорости обработки электрического сигнала, возникающего, по крайней мере, в одной мышце человека, и управления устройствами.
Согласно одному из вариантов реализации, предлагается способ для управления устройствами, в котором сенсором электромиограммы осуществляется регистрирование, по крайней мере, одного электрического сигнала, возникающего, по крайней мере, в одной мышце пользователя при ее напряжении пользователем, причем регистрирование упомянутого сигнала осуществляется многоразовыми неинвазивными электродами сенсора электромиограммы непосредственно на поверхности кожи пользователя в местах размещения электродов сенсора электромиограммы; сенсором электромиограммы осуществляется обработка, по крайней мере, одного зарегистрированного электрического сигнала, причем в процессе упомянутой обработки осуществляется: а) предварительное усиление усилителем зарегистрированного электрического сигнала; б) фильтрация фильтром высокой частоты сигнала из (а); в) фильтрация полосно-заграждающим фильтром сигнала из (б); г) фильтрация фильтром нижних частот сигнала из (в); д) окончательное усиление сигнала из (г); аналогово-цифровым преобразователем микроконтроллера сенсора электромиограммы осуществляется преобразование сигнала из (д) в цифровое значение сигнала; микроконтроллером сенсора электромиограммы осуществляется формирование пакета данных, который содержит название сенсора электромиограммы и упомянутое цифровое значение сигнала; микроконтроллером сенсора электромиограммы осуществляется передача упомянутого сформированного пакета данных в вычислительный модуль; вычислительным модулем осуществляется обработка пакета данных, которая включает: осуществление накапливания массива упомянутых цифровых значений сигнала; осуществление расчета величины электрической мышечной активности пользователя после накопления количества цифровых значений сигнала; осуществление вычисления разницы между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала и осуществление умножения полученной разницы упомянутых значений на числовой множитель, принимающий значения от нуля до единицы и определяющий степень вклада вычисленного значения сигнала по отношению к вычисленному значению сигнала ранее, и прибавления к полученной разнице между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала, умноженного на единицу минус упоминаемый данный числовой множитель принимающий значение от нуля до единицы, причем при вычислении разницы между максимальным и минимальным значениями упомянутого сигнала в первый раз, при отсутствии вычисленной ранее разницы между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала, к вычисленной разнице между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала, умноженной на числовой множитель, принимающий значения от нуля до единицы и определяющий степень вклада вычисленного значения сигнала по отношению к вычисленному значению сигнала ранее, ничего не прибавляется; радиомодулем осуществляется передача, по крайней мере, одного управляющего сигнала на управляемое устройство для управления таким управляемым устройством или, по крайней мере, одним элементом такого управляемого устройства.
В одном из частных вариантов реализации частота среза фильтра высокой частоты составляет 0.02 Гц.
В одном из частных вариантов реализации частота частота полосно-заграждающего фильтра составляет 50 Гц.
В одном из частных вариантов реализации частота среза фильтра нижних частот частоты составляет 100 Гц.
В одном из частных вариантов реализации управляющий сигнал формируется посредством использования в качестве такового рассчитанной величины электрической мышечной активности пользователя для осуществления пропорционального управления управляемым устройством или, по крайней мере, одним элементом такого управляемого устройства, причем величина управляющего сигнала пропорциональна рассчитанной величине электрической мышечной активности пользователя.
В одном из частных вариантов реализации управляющий сигнал равен одному из двух значений: логическому «нулю» или логической «единице», причем выбор логической «единицы» осуществляется при превышении или равенстве величины электрической мышечной активности пользователя определенного порогового значения, предустановленного пользователем, и логическому «нулю» при невыполнении этого условия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Дополнительные цели, признаки и преимущества настоящего технического решения будут понятны из прочтения последующего описания осуществления технического решения со ссылкой на прилагаемые чертежи, на которых:
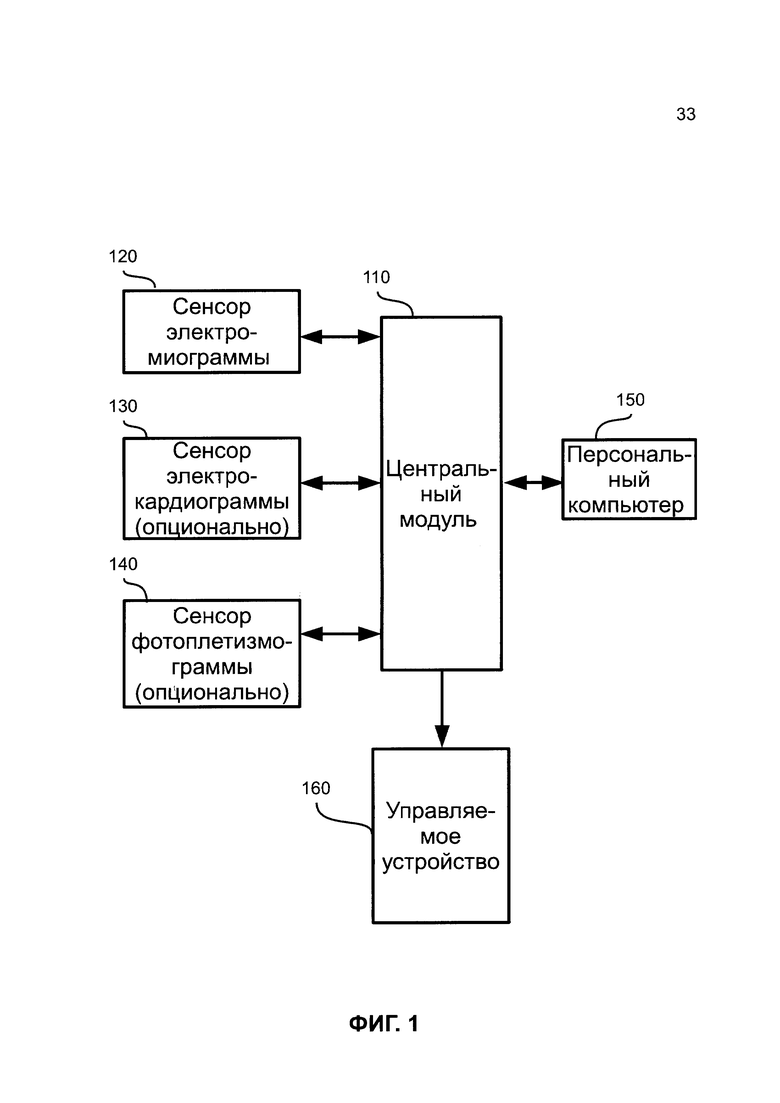
На ФИГ. 1 показан примерный вариант системы, в частном случае, реализующий способ, описываемый в рамках настоящего изобретения.
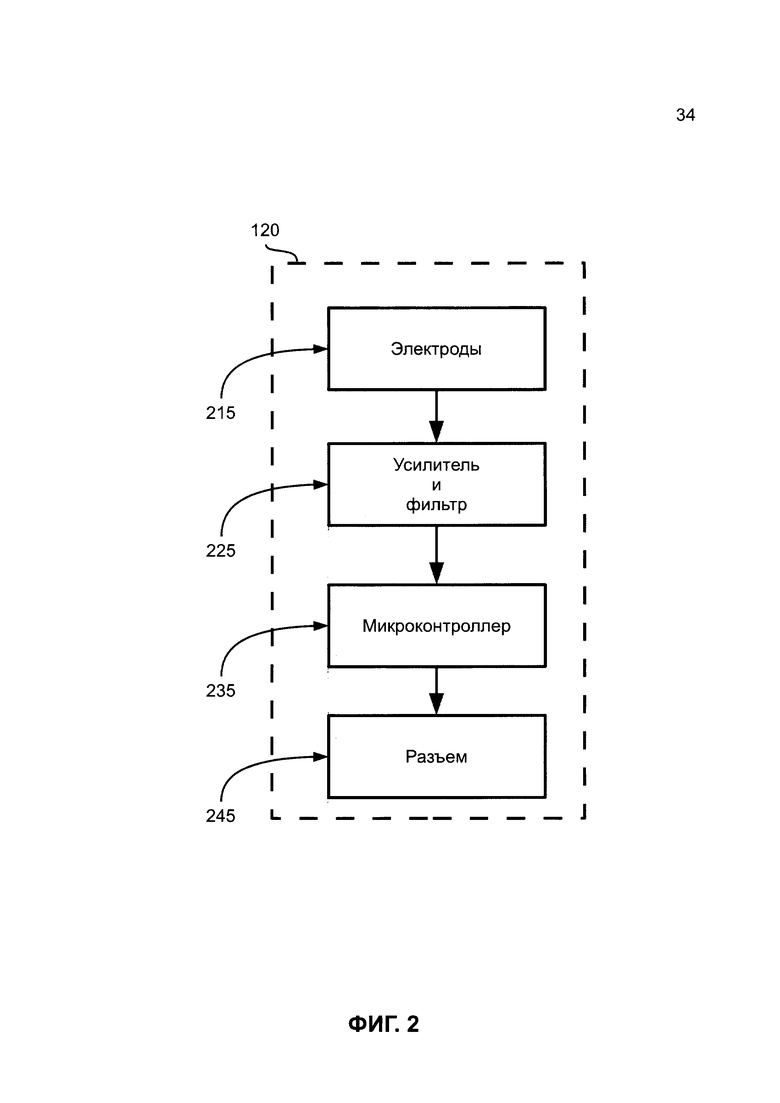
На ФИГ. 2 приведена (функциональная) блок-схема составных частей сенсора электромиограммы, согласно настоящему изобретению.
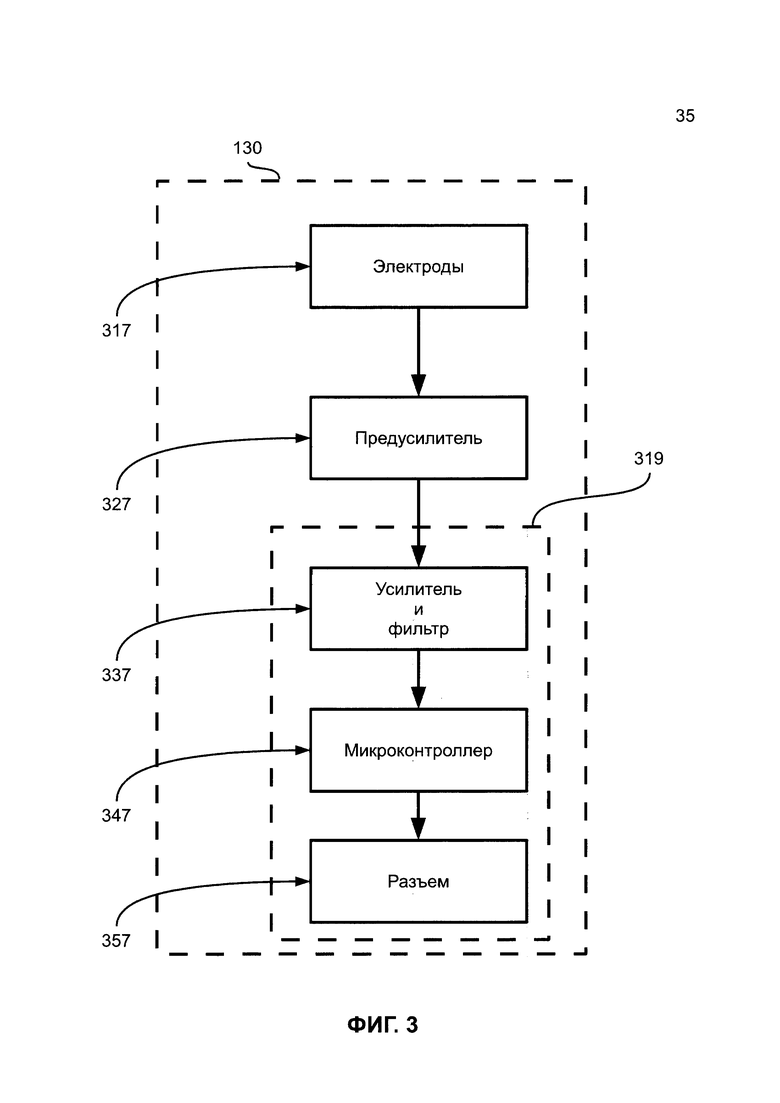
На ФИГ. 3 приведена (функциональная) блок-схема составных частей сенсора электрокардиограммы, согласно настоящему изобретению.
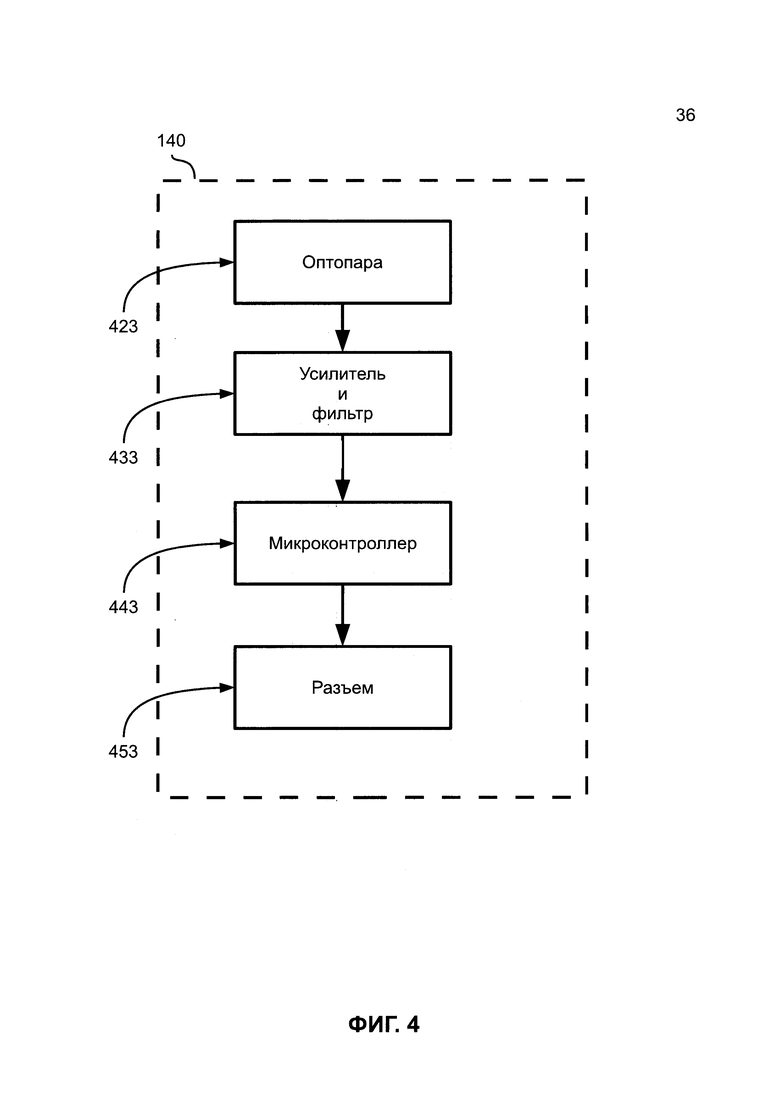
На ФИГ. 4 приведена (функциональная) блок-схема составных частей сенсора фотоплетизмограммы, согласно настоящему изобретению.
На ФИГ. 5 приведена блок-схема центрального модуля, согласно настоящему изобретению.
На ФИГ. 6 показана блок-схема описываемого способа, согласно реализации настоящего изобретения.
На ФИГ. 7 показана блок-схема обработки сигнала электромиограммы микроконтроллером центрального модуля, согласно одному из вариантов осуществления настоящего изобретения, в частности, показана блок-схема пропорциональной обработки сигнала электромиограммы.
На ФИГ. 8 показана блок-схема обработки сигнала электромиограммы микроконтроллером центрального модуля, согласно одному из вариантов осуществления настоящего изобретения, в частности, показана блок-схема частного случая пропорциональной обработки сигнала электромиограммы, в частности обработки сигнала электромиограммы для логического (триггерного) управления, при котором упомянутый диапазон возможных формируемых числовых значений состоит из двух чисел, в частности, логической единицы и нуля.
Объекты и признаки настоящего изобретения, способы для достижения этих объектов и признаков станут очевидными посредством отсылки к примерным вариантам осуществления. Однако настоящее изобретение не ограничивается примерными вариантами осуществления, раскрытыми ниже, оно может воплощаться в различных видах. Сущность, приведенная в описании, является ничем иным, как конкретными деталями, обеспеченными для помощи специалисту в области техники в исчерпывающем понимании изобретения, и настоящее изобретение определяется только в объеме приложенной формулы.
Используемые в настоящем описании изобретении термины «компонент», «элемент», «система», «модуль», «часть», в частности, «составная часть», и подобные используются для обозначения компьютерных сущностей (например, объектов, связанных с компьютером, вычислительных сущностей), которые могут являться аппаратным обеспечением, в частности, оборудованием (например, устройством, инструментом, аппаратом, аппаратурой, составной частью устройства, в частности, процессором, микропроцессором, печатной платой и т.д.), программным обеспечением (например, исполняемым программным кодом, скомпилированным приложением, программным модулем, частью программного обеспечения и/или кода и т.д.) или микропрограммой (прошивкой/firmware). Так, например, компонент может быть процессом, выполняющемся/исполняющимся на процессоре, процессором, объектом, исполняемым файлом, программой, функцией, методом, библиотекой, подпрограммой и/или вычислительным устройством (например, микрокомпьютером или компьютером) или комбинацией программного или аппаратного обеспечения. В качестве иллюстрации: как приложение, запущенное на сервере, может быть компонентом или модулем, так и сервер может быть компонентом или модулем. По крайней мере, один компонент может находиться (располагаться) внутри процесса. Компонент может располагаться на одном вычислительном устройстве (например, компьютере) и/или может быть распределен между двумя и более вычислительными устройствами. Так, например, в частном случае приложение (компонент), может быть представлено серверным компонентом (серверной частью) и клиентским компонентом (клиентской частью). В частном случае, клиентский компонент устанавливается, по крайней мере, на одно вычислительное устройство, а серверный компонент устанавливается на второе вычислительное устройство, с которого, в частном случае, производится управление и/или настройка первого вычислительного устройства (и/или его составных компонентов/частей.
На ФИГ. 1 показан примерный вариант системы, в частном случае, реализующий способ, описываемый в рамках настоящего изобретения.
Изображенная на ФИГ. 1 система для осуществления описываемого способа для управления устройствами (в том числе роботизированными устройствами) и составными частями (элементами) таких устройств (160) включает центральный модуль 110 (являющийся вычислительным модулем, в частности, вычислительным устройством) и сенсор электромиограммы 120, подключенный к центральному модулю 110, в частности, посредством AUX-соединения (в частности, AUX-кабеля) с использованием интерфейса UART, или посредством любого известного типа, в частности, способа связи или соединения (проводного или беспроводного).
Стоит отметить, что, в частном случае, к центральному модулю 110 также подключены сенсор электрокардиограммы 130 и сенсор фотоплетизмограммы 140, в частности, посредством AUX-соединения, или посредством любого известного типа, в частности, способа связи или соединения (проводного или беспроводного).
Также, центральный модуль 110 может быть подключен к вычислительному устройству, например, компьютеру, в частности, персональному компьютеру 150, например, посредством USB-соединения, или посредством любого известного типа, в частности, способа связи или соединения (проводного или беспроводного).
Упомянутые сенсоры (120, 130, 140) осуществляют считывание (регистрирование) и предварительную обработку биосигналов (биологических сигналов, далее сигналов) человека, в частности, пользователем системы, изображенной на ФИГ. 1, или, по крайней мере, одной части такой системы, которые (сигналы) далее в виде данных отправляются (передаются) в центральный модуль 110. Далее полученные центральным модулем ПО данные обрабатываются и передаются, по крайней мере, на одно управляемое устройство 160 (или, по крайней мере, одну составную часть, в частности, элемент, модуль и т.д. такого управляемого устройства 110) с целью управления таким устройством 160 или, по крайней мере, одной его составной частью. Упомянутыми управляемыми устройствами (110) могут являться, например, бытовая техника, персональные компьютеры, робототехнические устройства и т.д. Упомянутыми составными частями управляемых устройств (110) могут являться реле, двигатели, цифровые логические входы устройств (например, триггеров), актуаторы различных типов (сельсины, сервомашинки и тп.). Также (опционально) данные с центрального модуля 110 отправляются (передаются) на персональный компьютер 150, на котором установлено программное обеспечение для (последующей) обработки и визуализации сигналов, в частности, являющимися упомянутыми обработанными сигналами.
На ФИГ. 2 приведена (функциональная) блок-схема составных частей сенсора электромиограммы, согласно настоящему изобретению.
Сенсор (в частности, модуль) электромиограммы 120 осуществляет регистрирование (измерение, считывание), по крайней мере, одного сигнала электромиограммы, в частности, электрических сигналов, возникающих в мышце человека (пользователя) при их напряжении. Регистрирование упомянутого сигнала (сигналов) осуществляется посредством использования многоразовых неинвазивных электродов сенсора электромиограммы 120, которые представляют собой металлические полоски, вмонтированные на поверхность корпуса сенсора электромиограммы 120. Для осуществления считывания сигнала электромиограммы электроды должны плотно прилегать к тому месту на поверхности тела человека (пользователя), под которым располагаются мышцы человека (пользователя). Так, например, для этого корпус сенсора электромиограммы 120 может включать ремни (ремешки), которые могут быть обернуты и застегнуты вокруг руки или ноги человека (пользователя).
Сенсор электромиограммы 120 осуществляет усиление зарегистрированного сигнала (в частном случае, в 5000 раз по напряжению) посредством использования (модуля) усилителя и фильтра 225 (модуля усиления и фильтрации). Стоит отметить, что упомянутое усиление зарегистрированного сигнала состоит из двух этапов: предварительного усиления (предусиления) сигнала и окончательного усиления сигнала, как более подробно описано далее. В частном случае, сенсор электромиограммы 120 является одноканальным, т.е. считывает один сигнал электромиограммы: в частности, сигнал, который регистрируется непосредственно на поверхности кожи пользователя (человека) в месте (или местах) размещения электрода (электродов) 215 сенсора электромиограммы 120.
В частном случае, электроды сенсора электромиограммы 120 выполнены в виде трех металлических полосок (пластин, в частности различной толщины и сечения): две из которых подключены к входу усилителя и фильтра 225, а третья -является референсным электродом. Референсный электрод используется для выравнивания потенциалов тела человека и электрической схемы сенсора электромиограммы 120.
Считанный (полученный, измеренный зарегистрированный и т.д.) с электродов 215 сигнал усиливается и фильтруется модулем усилителя и фильтра 225, в частности, осуществляется предварительное усиление (предусиление) упомянутого сигнала (сигналов), например, в 10 раз по напряжению, и далее упомянутый сигнал последовательно проходит через каскад фильтров (в частности, через фильтр высокой частоты (например,
https://ru.wikipedia.org/wiki/Фильтр_верхних_частот) с частотой среза 0.02 Гц и далее через режекторный, он же полосно-заграждающий фильтр, (https://ru. wikipedia.org/wiki/Пoлocнo-зaгpaждaющий_фильтp) с частотой заграждения 50 Гц, и далее через фильтр нижних частот (например, https://ra.wikipedia.org/wiki/Фильтp_нижниx_чacтoт) с частотой среза 100 Гц) и осуществляется окончательное усиление сигнала (в частности в 500 раз по напряжению).
Далее, сигнал передается на аналогово-цифровой преобразователь микроконтроллера 235, который осуществляет оцифровку упомянутого аналогового сигнала электромиограммы (преобразование аналогового сигнала в цифровой сигнал). Далее микроконтроллер 235, в частности, посредством АЦП (аналогово-цифрового преобразователя) микроконтроллера, осуществляет преобразование аналогово сигнала в цифровой сигнал (цифровое значение сигнала) и формирует пакет данных на выходе (в частности, реализованный разъемом 245) сенсора электромиограммы 120, отправляемый (передаваемый) в центральный модуль 110, причем пакет данных содержит название (или идентификатор, идентификационный номер) сенсора электромиограммы 120 и цифровое значение измеренного сигнала электромиограммы (цифровое значение сигнала), в частности, значение отсчета АЦП («цифровое» значение измеренного аналогового сигнала).
На ФИГ. 3 приведена (функциональная) блок-схема составных частей сенсора электрокардиограммы, согласно настоящему изобретению.
Сенсор (в частности, модуль) электрокардиограммы 130 осуществляет считывание (в частности, получение) сигнала электрокардиограммы (ЭКГ), являющихся электрическими сигналами, возникающими при работе сердца человека (пользователя). Измерение осуществляется с использованием одноразовых ЭКГ-электродов. Сенсор электрокардиограммы 130 осуществляет усиление сигнала (в частности, в 1000 раз по напряжению) и является одноканал ьным.
В частном случае, конструктивно сенсор электрокардиограммы 130 выполнен в виде двух модулей (содержит два отдельных модуля): модуля предварительного усиления (предварительный усилитель, предусилитель, модуль предусиления) 327, и модуля 319, включающего усилитель и фильтр (модуль усиления и фильтрации) 337 и микроконтроллер 347, причем модуль предварительного усиления (предварительный усилитель) 327 и модуль 319 соединены посредством AUX-соединения (в частности, посредством использования AUX-кабеля). Причем модуль 319 также включает разъем 357 (являющийся выходом сенсора электрокардиограммы 130) для подключения (связи) сенсора электрокардиограммы 130 к центральному модулю 110.
Считываемый (регистрируемый) электродами 317 сенсора электрокардиограммы 130 сигнал усиливается в модуле предварительного усиления (предусилителе) 327 (например, в 10 раз по напряжению) и, после такого предварительного усиления (предусиления) передается, в частности, по AUX-кабелю, в модуль 319 для осуществления последующих (в частности, окончательных) фильтрации и усиления такого сигнала. Стоит отметить, что модуль предварительного усиления 327 реализован на операционном усилителе (операционным усилителем), в частном случае на инструментальном операционном усилителе (инструментальным операционным усилителем).
Подобное решение (осуществление) позволяет увеличить качество считываемого сигнала электродами 317 сенсора электрокардиограммы 130 за счет повышения соотношения сигнал/шум в непосредственной близости от места расположения электродов 317 сенсора электрокардиограммы 130, что, в свою очередь, снижает величину искажения такого сигнала при воздействии внешних помех на малосигнальную часть схемы (в частности, проводов от электродов 317 сенсора электрокардиограммы 130 до модуля предварительного усиления (предварительного усилителя, предусилителя) 327).
В усилителе и фильтре (модуле усиления и фильтрации) 337 осуществляется последующие (в частности, окончательные) фильтрация и усиление такого сигнала. Причем, сначала осуществляется фильтрация сигнала фильтром высоких частот (частота среза 0.1 Гц), затем фильтром нижних частот (в частном случае, частота среза составляет 250 Гц). Далее, сигнал усиливается, причем предусмотрена регулировка усиления сигнала, в частности, в диапазоне 10-100 раз (по напряжению). Стоит отметить, что регулировка усиления упомянутого сигнала реализована потенциометром (в частности, переменным резистором), который является частью сенсора, в частности, сенсора электрокардиограммы 130, и позволяет пользователю осуществлять упомянутую регулировку посредством регулировочного колесика потенциометра, посредством вращения которого и осуществляется настройка усиления сигнала. Стоит также отметить, что усиление сигнала может быть изменено при программировании, а также перепрограммировании (в частности, изменении прошивки, от англ. Firmware) сенсора, в частности, сенсора электрокардиограммы 130, для чего упомянутый сенсор электрокардиограммы 130 может содержать цифровой потенциометр, который также позволяет изменять упомянутое усиление сигнала. Далее, сигнал передается на аналогово-цифровой преобразователь микроконтроллера 347, который осуществляет формирование пакета данных, передаваемых на выход сенсора электрокардиограммы 130 (в частности, реализуемый разъемом 357) в центральный модуль 110. Стоит отметить, что данные (упомянутый пакет данных), в частном случае, передаются по интерфейсу UART через AUX-кабель, подключаемый к разъему 357 (или посредством любого известного типа, в частности, способа связи или соединения (проводного или беспроводного)), причем питание сенсора (в частности, модуля) электрокардиограммы 130 осуществляется через AUX-кабель (посредством AUX-соединения), или посредством любого известного типа, в частности, способа связи или соединения (проводного или беспроводного).
На ФИГ. 4 приведена (функциональная) блок-схема составных частей сенсора фотоплетизмограммы, согласно настоящему изобретению.
Сенсор фотоплетизмограммы 140 осуществляет считывание (измерение) сигнала фотоплетизмограммы (ФПГ) посредством использования оптической пары (оптопары) 423, в частности, реализуемой свето диодами и фотодиодом ((https://www.vishay.com/docs/8152/l/bpw34.pdf (smd-версией))). Принцип упомянутого измерения заключается в регистрации фотодиодом отраженного излучения от тканей человека в оптическом или около-оптическом диапазоне (ближний ИК-диапазон: длины волн 740 - 2500 нм). Стоит отметить, что в частном случае может быть использован, по крайней мере, один из типов упомянутого измерения, в частности, на просвет или на отражение (http://www.pef.unilj.si/eprolab/comlab/sttop/sttop-bm/bm-optical.htm). Стоит отметить, что в случае типа измерений на отражение за счет изменения количества крови в конечностях при работе сердца, такие изменения могут быть зарегистрированы, в частности, фотодиодом (за счет того, что в такт работе сердца пользователя изменяется кровенаполненность сосудов и изменяется количество отраженного света, попадающего на фотодиод, т.е. регистрируемого фотодиодом), причем такие зарегистрированные измерения являются синхронными с работой сердца пользователя (человека). Стоит отметить, что считывание упомянутого сигнала осуществляется неинвазивно, в частности, посредством крепления (установки) оптической пары к (или на) поверхности кожи пользователя, в частности, кожи пальцев рук(и), ладони (ладоней), по крайне мере, одного запястья пользователя и т.д.). Также, стоит отметить, что количество каналов считывания сигнала сенсором фотоплетизмограммы 140 равно единице (одному каналу).
Регистрируемый оптопарой (оптической парой) 423 сигнал поступает (передается) на усилитель и фильтр 433 (модуль усиления и фильтрации), причем модуль 433 включает фильтр высоких частот (в частности, с частотой среза 0.05 Гц), на который подается упомянутый сигнал, который в дальнейшем передается в (на) фильтр нижних частот (в частности, с частотой среза 5 Гц) и далее осуществляется усиление сигнала (в частности, в 100 раз по напряжению). Далее усиленный сигнал передается в микроконтроллер 443, в частности, в аналогово-цифровой преобразователь (АЦП) микроконтроллера 443, который (АЦП) является частью микроконтроллера 443 и осуществляет формирование (пакета) данных, передаваемых в центральный модуль 110 по интерфейсу UART через AUX-кабель (или посредством любого известного типа, в частности, способа связи или соединения (проводного или беспроводного)), подключаемый к разъему 453, причем питание модуля также осуществляется через упомянутый AUX-кабель.
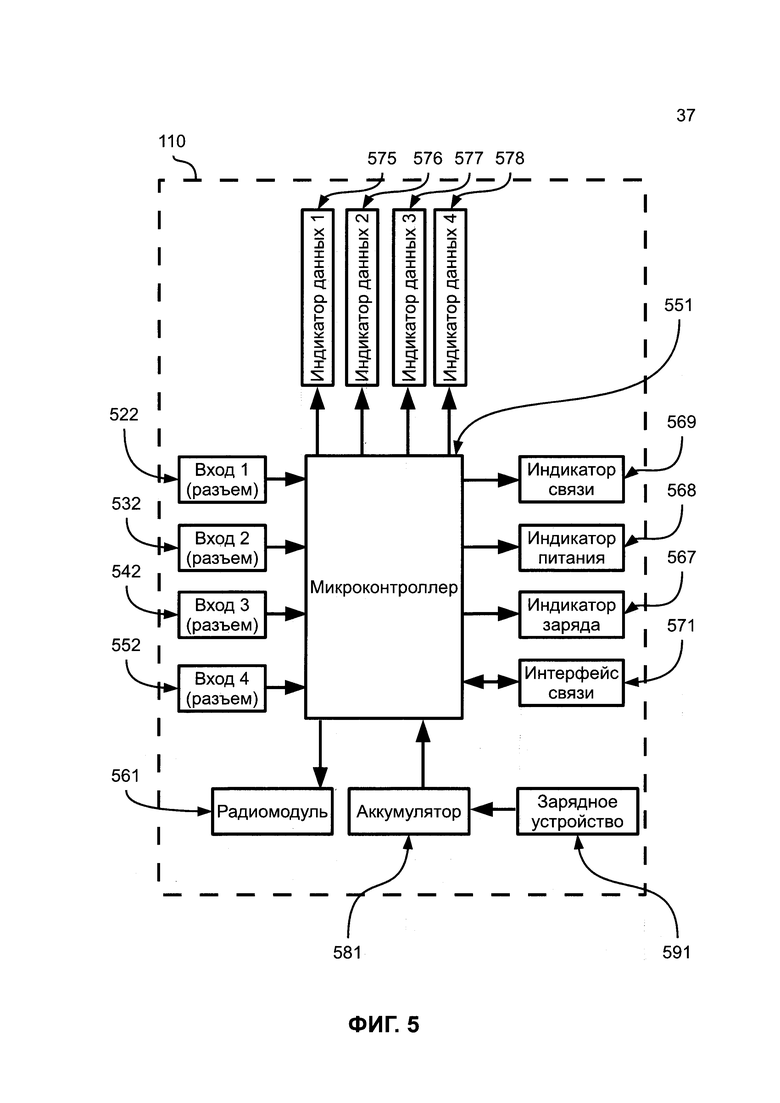
На ФИГ. 5 приведена блок-схема центрального модуля, согласно настоящему изобретению.
Центральный модуль 110 осуществляет прием (получение) данных (пакетов данных), передаваемых сенсорами 120, 130 и 140 на входы (в частности, реализованные контактами) (в частности, «гнездами») центрального модуля 110. Так, например, сигнал с выхода (в частности, реализованного разъемом 245) сенсора электромиограммы 120 передается на Вход 1 (522) центрального модуля 110, сигнал с выхода (в частности, реализованного разъемом 357) сенсора электрокардиограммы 130 передается на Вход 2 (532) центрального модуля 110, сигнал с выхода (в частности, реализованного разъемом 453) сенсора фотоплетизмограммы 140 передается на Вход 3 (542) центрального модуля 110.
Центральный модуль 110 осуществляет формирование пакетов данных (которые содержат название сенсора, номер разъема (входа) центрального модуля 110, к которому присоединен сенсор и цифровое значение сигнала) (значение отсчета АЦП («цифровое» значение измеренного аналогового сигнала)) и осуществляет передачу таких пакетов данных на персональный компьютер 150.
Центральный модуль 110 также посредством микроконтроллера 551 (и программы, в частности, кода, микроконтроллера) осуществляет обработку (пакетов) данных, в частности, математическую обработку данных, от сенсора электромиограммы 120 с целью формирования (в частности, вычисления) значений управляющих сигналов (значение переменной «ИТОГ», как более подробно описано далее), передаваемых на управляемое устройство посредством беспроводных типов связи (например, Bluetooth, Wi-Fi и т.д.), в частном случае, реализуемых радиомодулем 561. В частном случае микроконтроллер 551 имеет 5 интерфейсов UART (4 интерфейса для входов, к трем из которых подключены сенсоры 120, 130 и 140, а один (552, ФИГ. 5) является резервным для возможного подключения еще одного сенсора, и 1 интерфейс для подключения радиомодуля 561) и может быть реализован микроконтроллером STM32F105RCT6 (http://www.st.com/en/microcontrollers/stm32fl05rc.html). Радиомодуль 561 может быть реализован Bluetooth-радиомодулем (например, НС-05 https://arduino-kit.ru/catalog/id/modul-bluetooth-hc-05) или другими радиомодулями (https://ru.wikipedia.org/wiki/ESP8266,
ttps://www.silabs.com/products/wireless/bluetooth/bluetooth-low-energy-modules/ble112-bluetooth-smart-module и т.д.).
Стоит отметить, что сенсоры 120, 130 и 140, а также управляемое устройство 160 (или управляемые устройства) могут быть связаны с центральным модулем 110, а также центральный модуль 110 может быть связан с персональным компьютером 150, посредством локальной вычислительной сети (ЛВС), сети Интернет и/или посредством любого другого вида (способа) проводной связи (например, посредством USB-интерфейса, интерфейса стандарта RS-232/COM-порта и т.д.) и/или беспроводной связи, например, Bluetooth, Wi-Fi, мобильной сотовой связи (GSM), в том числе 3G, 4G, LTE, в частности, в диапазонах 850/900/1800/1900 МГц, транкинговой связи и каналов передачи данных со сверхнизким энергопотреблением, формирующие сложные беспроводные сети с ячеистой топологией (ZigBee) и т.д.
Полученные на входы 522, 532, 542 данные (пакеты данных) от сенсоров 120, 130 и 140 обрабатываются микроконтроллером 551 центрального модуля ПО, как описано далее. В зависимости от типа сенсора (сенсор электромиограммы 120, сенсор электрокардиограммы 130, сенсор фотоплетизмограммы 140) микроконтроллер 551 осуществляет (или в частном случае, не осуществляет) предварительную цифровую обработку сигналов упомянутых сенсоров, и далее микроконтроллер 551 осуществляет передачу полученных данных (предварительно обработанных и/или не обработанных) посредством (модуля) интерфейса связи 571 (в частности, реализованным USB-соединением), например, на персональный компьютер 150 и/или посредством радиомодуля 561 на управляемое устройство 160. Стоит также отметить, что (модуль) интерфейс связи 571 позволяет осуществлять прием (получение данных) различных (подтверждение приема и/или выполнения команд(ы) управления, преобразованных управляемым устройством 160 из управляющих сигналов, передаваемых на такое управляемое устройство; сигналы, обработанные посредством использования различных (сложных) алгоритмов, данные для настройки параметров работы центрального модуля 110 или обновления его прошивки) данных от, например, персонального компьютера 150. Так, в частном случае осуществления настоящего изобретения, предварительная обработка для сигналов сенсора электромиограммы 120 (или любого другого сенсора) включает формирование управляющих сигналов и фильтрацию упомянутых сигналов от помех. В частном случае интерфейсом связи 571 является высокоуровневая организация приема-передачи данных, частной реализацией которого является радиомодуль 561.
Также микроконтроллер 551 осуществляет управление индикаторами данных 575, 576, 577, 578 которые предназначены (используются) для отображения (осуществляют отображение, в частном случае, визуализацию) факта приема данных от подключенных сенсоров 120, 130, 140. Индикация индикаторами данных 575, 576, 577 578 может осуществляться, например, световым способом (с помощью лампы накаливания или светодиода, например, мигание или постоянное горение которых обозначает прием (получение) данных, негорение - отсутствие приема данных). Стоит отметить, что индикатор данных 578 является резервным.
Стоит отметить, что центральный модуль 110 включает радиомодуль 561, который позволяет осуществлять передачу обработанных или необработанных данных, как упомянуто выше, от сенсоров 120, 130, 140 к другим устройствам (например, в персональный компьютер 150 или, по крайней мере, на одно управляемое устройство 150).
Включение или выключение радиомодуля 561 (в частности получение или отправка таким радиомодулем данных, в частности, сигналов) сопровождается соответствующей индикацией посредством индикатора связи 569 и может быть выполнена (осуществлена) световым способом (например, с помощью (с использованием) лампы накаливания или светодиода, мигание или постоянное горение ((свето)индикация) которых обозначает работу радиомодуля 561, а негорение (отсутствие индикации) - его отключенное состояние).
В частном случае центральный модуль 110 может обеспечиваться питанием через встроенный аккумулятор 581 или через шину питания интерфейса связи 571 (например, в случае использования USB-соединения между центральным модулем 110 и персональным компьютером 150). Зарядка аккумулятора 581 осуществляется посредством зарядного устройства 591 (модуля зарядного устройства, блока зарядного устройства), питание (в частности, напряжение) на которое может быть подано с внешнего блока питания (в частном случае реализованным адаптером для зарядки сотовых телефонов, бытовой техники, портативных компьютеров, ноутбуков и т.д.) или с шины питания интерфейса связи 571 (например, в случае использования упомянутого USB-соединения). Таким упомянутым зарядным устройством 591 является, например, специализированные микросхемы для зарядки аккумуляторных батарей (https://dlnmh9ip6v2uc.cloudfront.net/datasheets/Prototyping/TP4056.pdf).
Индикатор питания 568 осуществляет (обеспечивает) отображение уровня заряда аккумулятора 581. В частном случае индикатор питания 568 реализован световым способом (например, по крайней мере, одной лампой накаливания или, по крайней мере, одним светодиодом). Индикация индикатором питания используется для информирования пользователя о разряде (в частном случае, низком уровне заряда) аккумулятора 581 и необходимости подзарядки аккумулятора 581. Индикация может осуществляться, например, следующим образом: индикатор питания 568 не горит - уровень заряда аккумулятора 581 является нормальным (в частности, достаточным для стабильной работоспособности центрального модуля 110 и, соответственно, подключенных к нему сенсоров 120, 130 и 140); индикатор питания 568 мигает - уровень заряда аккумулятора 581 является приемлемым (в частности, центральный модуль 110, и, соответственно, подключенные к нему сенсоры 120, 130 и 140, функционирует еще стабильно, но через, например, 20 минут, выключится из-за разрядки аккумулятора 581 или может работать нестабильно), но уже требуется подзарядка аккумулятора 581; индикатор питания 568 горит постоянно - обязательно требуется подзарядка аккумулятора 581.
Индикатор заряда 567 осуществляет (обеспечивает) отображение процесса зарядки при подключении зарядного устройства 591 и/или упомянутой шины питания. Индикатор заряда 567 может быть реализован световым способом (например, по крайней мере, одной лампой накаливания или, по крайней мере, одним светодиодом).
В частном случае, индикация индикатором заряда 567 может осуществляться следующим образом: индикатор заряда 567 мигает - осуществляется зарядка аккумулятора 581; индикатор заряда 567 горит постоянно - окончание зарядки аккумулятора 581 (аккумулятор 581 заряжен).
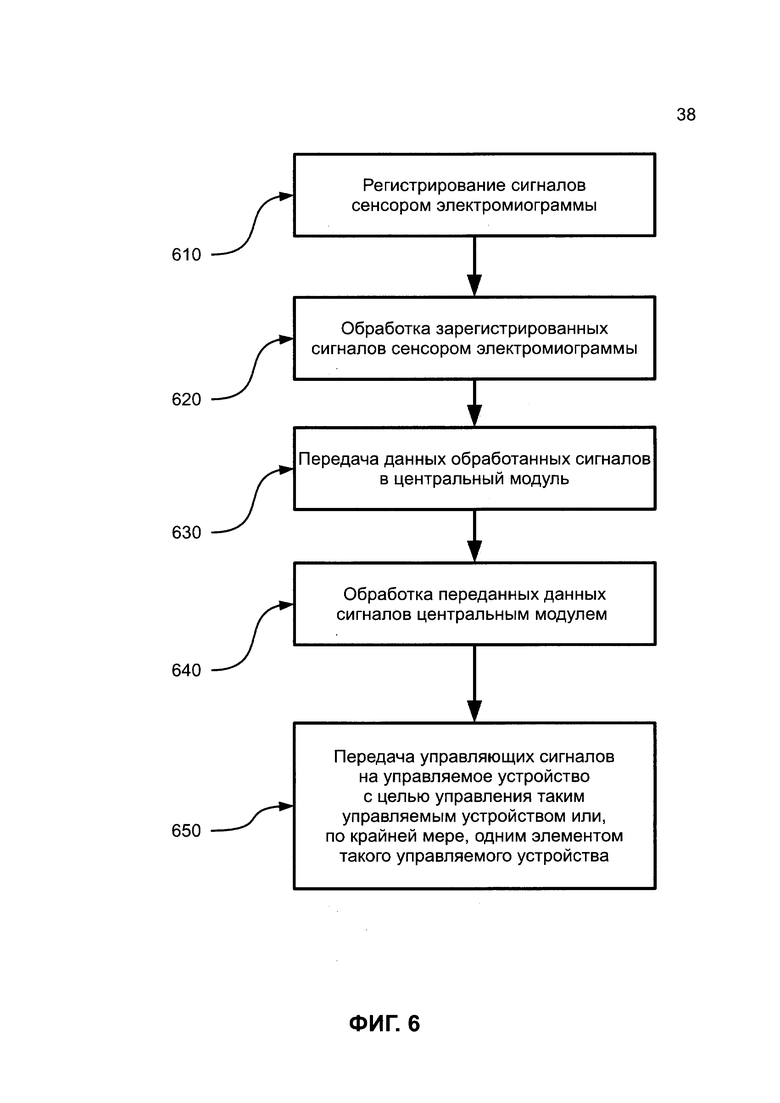
На ФИГ. 6 показана блок-схема описываемого способа, согласно реализации настоящего изобретения.
В шаге 610 осуществляется регистрирование сигналов электромиограммы пользователя сенсором электромиограммы 120, как описано в рамках настоящего изобретения (в частности, в описании к ФИГ. 2).
Далее в шаге 620 осуществляется обработка зарегистрированных сенсором электромиограммы 120 упомянутых сигналов, в частности, осуществляется усиление (и предварительное усиление, если это необходимо, как описано в рамках настоящего изобретения) и фильтрация зарегистрированного сигнала посредством использования усилителя и фильтра 225, как описано в рамках настоящего изобретения.
Далее в шаге 630 осуществляется передача данных обработанных сигналов сенсором электромиограммы 120 в центральный модуль 110.
Далее в шаге 640 центральным модулем 110, в частности, микроконтроллером 551 центрального модуля 110, осуществляется обработка данных (как более подробно показано на ФИГ. 7 с соответствующим описанием), переданных сенсором электромиограммы 120 в центральный модуль 110.
Далее в шаге 650 центральным модулем 110, в частности, радиомодулем 561 осуществляется передача управляющих сигналов, по крайней мере, на одно управляемое устройство 160 (или, по крайней мере, одну его часть, в частности, составной элемент, модуль и т.д.), как описано в рамках настоящего изобретения (в частности, в описании к ФИГ. 1 и ФИГ. 5).
Как было сказано выше, центральный модуль 110, в частности, микроконтроллер 551 центрального модуля 110 осуществляет обработку данных, в частности, по крайне мере, одного сигнала от сенсора электромиограммы (ЭМГ) 120 (в том числе обработанных сигналов, как было описано выше), в частном случае с целью формирования (в частности, вычисление) управляющих сигналов, которые передаются (отправляются) на управляемое устройство 160 посредством радиомодуля 561, где в дальнейшем преобразуются управляемым устройством 160, например, микроконтроллером управляемого устройства 160, в управляющие команды.
Упомянутая обработка данных, в частности, по крайне мере, одного сигнала от сенсора электромиограммы 120, осуществляется микроконтроллером 551 центрального модуля 110 с целью формирования (цифровых) управляющих сигналов для управления, по крайней мере, одним управляемым устройством 160 (в частном случае являющимся техническим, роботизированным и т.д. устройством) или, по крайней мере, одним составным элементом (частью, модулем и т.д.) такого управляемого устройства 160. Упомянутые (цифровые) управляющие сигналы передаются (отправляются) из центрального модуля 110 на управляемое устройство 160 посредством радиомодуля 561.
В частном случае, формирование (цифровых) управляющие сигналы для управления, по крайней мере, управляемым устройством 160 (после их преобразования в управляющие команды, как описано в рамках настоящего изобретения) осуществляется посредством оценки (вычисления) величины упомянутого сигнала электромиограммы, как описано далее.
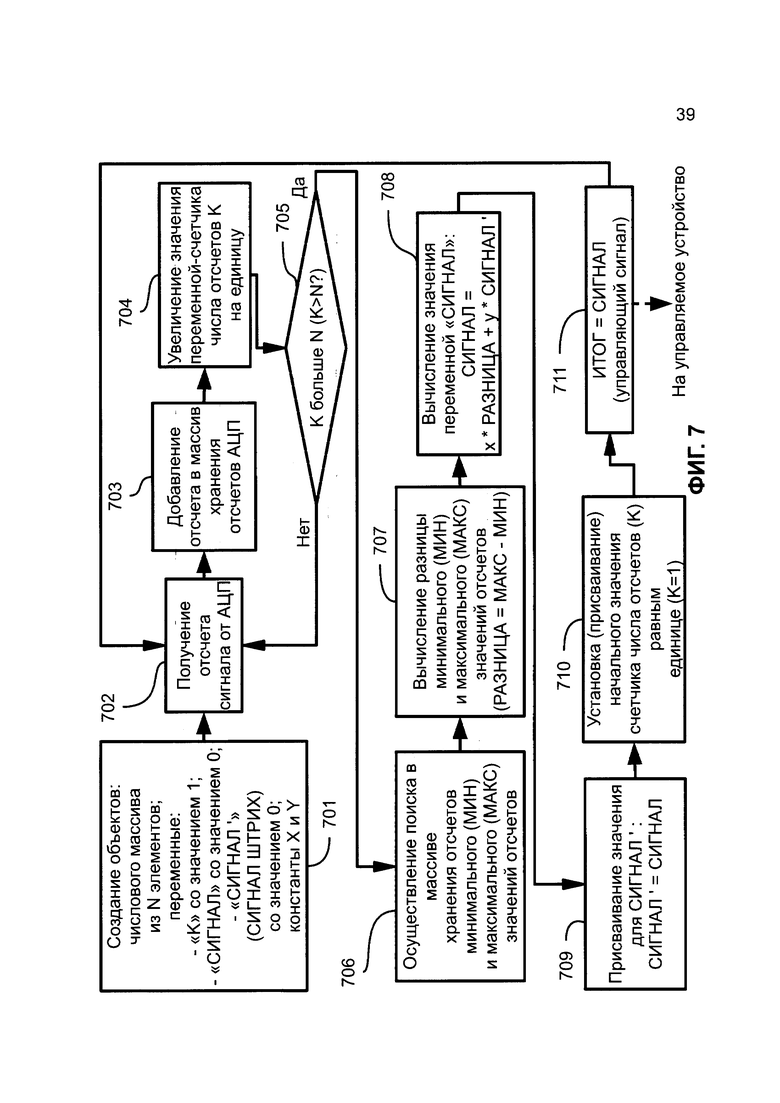
На ФИГ. 7 показана блок-схема обработки сигнала электромиограммы микроконтроллером центрального модуля, согласно одному из вариантов осуществления настоящего изобретения, в частности, показана блок-схема пропорциональной обработки сигнала электромиограммы.
В частном случае, управление управляемым устройством 160 осуществляется посредством передачи на управляемое устройство 160 сформированного цифрового сигнала (управляющего сигнала), пропорционального амплитуде ЭМГ-сигнала. В частном случае таким упомянутым цифровым сигналом является число из заранее заданного диапазона числовых значений, причем такое число пропорционально амплитуде ЭМГ-сигнала, т.е. является пропорциональным управлением управляемым устройством 160 (или способом, в частности, вариантом, пропорционального управления управляемым устройством 160). Пропорциональное управление (способ, в частности, вариант, управления) управляемым устройством 160 может использоваться для управления такими управляемыми устройствами 160, как сервоприводы, регуляторы громкости, регуляторы напряжения и т.д., т.е. такими управляемыми устройствами 160, режимы работы которых задаются в диапазоне значений более двух.
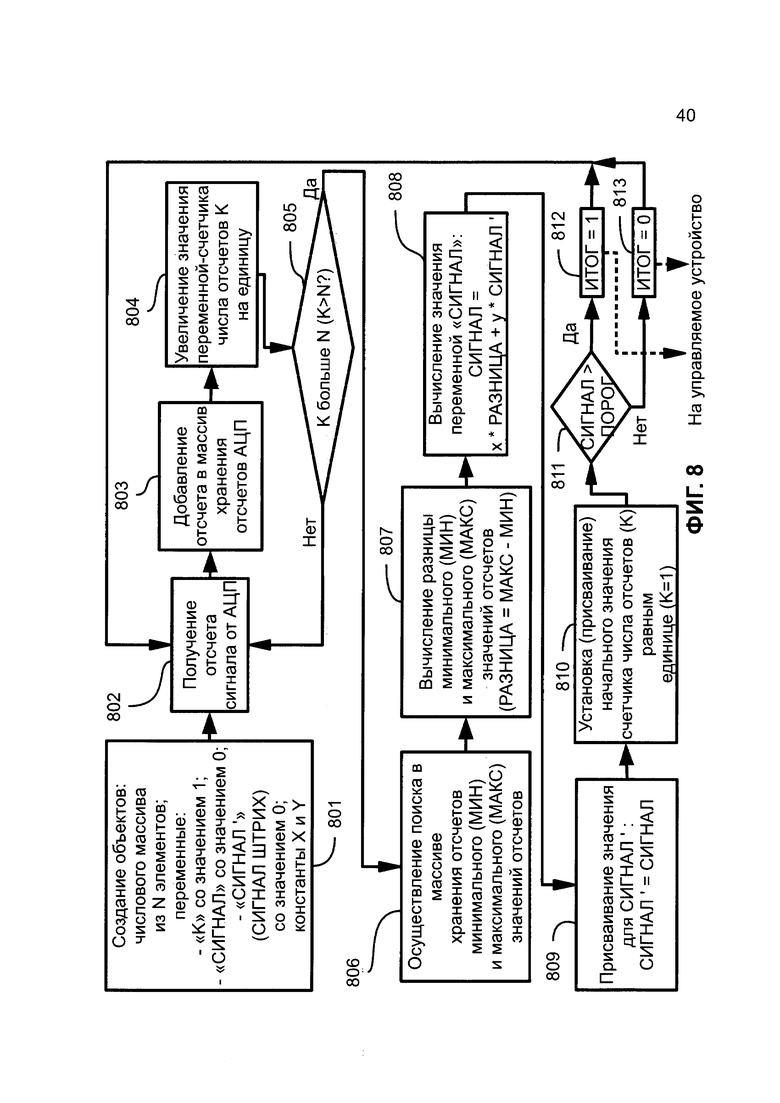
Стоит отметить, что частным случаем пропорционального управления управляемого устройства 160 является логическое (триггерное) управление, показанное на ФИГ. 8, при котором упомянутый диапазон возможных формируемых числовых значений состоит из двух чисел, в частности, логической единицы и нуля. Такой вариант (в частности, способ) управления может быть использован (применяться) для управляемых устройств 160, которые имеют только два (2) режима работы, например, «включено» и «выключено», причем такими управляемыми устройствами 160 в частном случае могут являться выключатели, реле, электронные ключи и т.д.
В частном случае упомянутая обработка, по крайней мере, одного электромиографического сигнала (в частности, данных (обработанных) электромиографических сигналов) в шаге 640 (ФИГ. 6) заключается в вычислении цифрового значения, пропорционального силе напряжения мышцы пользователя (человека). Так, например, в модуле хранения данных (например, ОЗУ, ППЗУ, флеш-память и т.д.) центрального модуля 110 микроконтроллера создается N-битная переменная («СИГНАЛ»), в которую осуществляется запись микроконтроллером 551 упомянутого вычисляемого цифрового значения. Упомянутая переменная («СИГНАЛ») может принять два в степени N минус один (2∧N-1) значение, т.е., например, для однобайтной переменной такой набор дискретных значений составляет от 0 до 255. Таким образом, реализуется упомянутый пропорциональный вариант управления, т.е. чем выше сила напряжения мышцы пользователя (пользователем), тем выше (больше) числовое значение в переменной («СИГНАЛ»).
Далее микроконтроллером 551 осуществляется вычисление (расчет) амплитуды ЭМГ-сигнала и, в частном случае, может осуществляться нормирование на упомянутый набор дискретных значений, в частности для «проецирования» диапазона выходных значений упомянутой переменной («СИГНАЛ») в один байт.
Вычисление (расчет) амплитуды ЭМГ-сигнала может осуществляться посредством использования различных подходов, в частности, посредством вычисления значения огибающей ЭМГ-сигнала в определенный момент времени t (т.е. когда осуществляется вычисление значения управляющих сигналов, таким образом в цикле осуществляется считывание ЭМГ-сигнала, заполнение буфера и т.д. для получения в цикле (циклически) набора (значений) управляющих сигналов). Данный подход обработки ЭМГ-сигнала является относительно простым с точки зрения его аппаратной реализации. Данный подход также известен как «амплитудный детектор». Посредством подключения выхода амплитудного детектора к компаратору с порогом срабатывания (Апор) осуществляется реализация устройства (в частности, модуля) для управления управляемыми устройствами (160) посредством ЭМГ-сигнала. В частном случае, когда сигнал на выходе амплитудного детектора ниже порога срабатывания (Апор), то выход компаратора содержит практически (приближенное к) нулевое значение (логический нуль), в противоположном случае - логическая единица.
Подобный подход может быть реализован ресурсами микроконтроллера 551 (посредством микроконтроллера 551), однако, в частном случае подход обладает тем недостатком, что при колебаниях базовой линии ЭМГ-сигнала (среднего значения ЭМГ-сигнала) могут происходить ложные срабатывания или несрабатывания триггера (так, например, при появлении ЭМГ-сигнала относительно опорного уровня в 2.5 Вольт, а триггер срабатывает при достижении амплитудой сигнала (или огибающей) 3 Вольта, тогда при смещении опорного уровня до 1 Вольта, то в части случаев, когда размах электромиограммы был достаточен для срабатывания триггера при 3 Вольт, то срабатывания относительно опорного уровня в 1 Вольт уже не будет), которые зависят от смещения базовой линии ЭМГ-сигнала относительно ее изначального положения, по отношению к которому осуществлялась калибровка, в процессе которого осуществляется установка заданного (некоего) уровня напряжения, в частности, уровня срабатывания триггера, при превышении ЭМГ-сигналом которого срабатывает триггер. Ложные срабатывания при изменении опорного уровня упомянутого сигнала затрудняют практическое использование упомянутых подходов и систем в частности, для управления управляемыми устройствами (160) с помощью (использованием) ЭМГ-сигналов. Причем упомянутые затруднения с практическим применением, в частном случае, связано с частым «плаванием» базовой линии сигнала при движении пользователя (человека) или при движениях конечностями пользователем, на которых, в частном случае, закреплены электроды 215. Также, упомянутые затруднения с практическим применением связаны с изменением качества контакта электродов 215 с поверхностью кожи пользователя (человека).
В описываемом изобретении обработка данных (обработанных) сигналов центральным модулем 110 (в частности микроконтроллером 551) осуществляется посредством (усовершенствованной) обработки упомянутых данных (в частности, по крайней мере, одного сигнала, в том числе обработанного сигнала сенсором 120, которая позволяет устранить, по крайней мере, один из упомянутых выше недостатков. Так, центральным модулем 110 осуществляется получение упомянутых данных (обработанных) сигналов, в частности, оцифрованного аналогового сигнала (оцифрованного сигнала и сформированного, по крайней мере, в один пакет данных на выходе сенсора электромиограммы 120, как описано выше), в частности, набором дискретных чисел (так называемых далее «отсчетов»), пропорциональных амплитуде упомянутого оцифрованного аналогового сигнала, где обработка таких дискретных чисел осуществляется группами (таких дискретных чисел) через определенный промежуток времени (период оцифровки, в частности время семплирования), из сенсора электромиограммы 120 (в частности с выхода сенсора электромиограммы 120, например, реализованным разъемом 245).
В частном случае, упомянутая обработка данных (обработанных), по крайней мере, одного сигнала (оцифрованного аналогового сигнала (оцифрованного сигнала и сформированного, по крайней мере, в один пакет данных на выходе сенсора электромиограммы 120, далее - сигнала) центральным модулем 110 (в частности микроконтроллером 551) осуществляется посредством вычисления разницы максимального и минимального значений упомянутого сигнала в определенном (исходя из требований и скорости срабатывания триггера) временном диапазоне (окне) с длиной в N отсчетов. Такая обработка упомянутого сигнала позволяет избавиться от качания базовой линии сигнала, в частности, абсолютные значения сигнала (сигналов) могут меняться, однако их (максимального и минимального значений в диапазоне (окне)) разница остается всегда неизменной (поскольку не зависит от опорного значения).
В шаге 701 осуществляется создание и начальная инициализация структур данных, необходимых для работы описываемой обработки данных, в частности, осуществляется создание:
- числового массива из «N» элементов для хранения отсчетов от АЦП, причем числовой массив изначально заполняется нулями, a «N» может равняться 32;
- числовой переменной-счетчика «К» для подсчета числа отсчетов АЦП, причем значение числовой переменной-счетчика «К» изначально равна единице (''1'');
- переменных «СИГНАЛ» и «СИГНАЛ'» («СИГНАЛ ШТРИХ»), причем СИГНАЛ' инициализируется нулевым значением;
- констант «X» и «Y», сумма которых равняется единице (например, «X» может равняться 0.6, a «Y» может равняться 0.4, или «X» может равняться 0.5, а «Y» может равняться 0.5 и т.д.), т.е. удовлетворять требованию (условию нормировки): X+Y - 1.
В шаге 702 осуществляется считывание аналогового сигнала посредством аналогово-цифрового преобразователя (АЦП) микроконтроллера 551 центрального модуля 110 и результатом оцифровки посредством упомянутого АЦП в (упомянутый) некоторый момент времени такого полученного аналогового сигнала является цифрового значение аналогового сигнала («отсчет»), формируемого посредством АЦП.
В частном случае, нумерация элементов числового массива из «N» отсчетов начинается с единицы.
В шаге 703 «отсчет» (цифровое значение) из шага 702 дописывается в массив из «N» отсчетов. Запись осуществляется в элемент, номер которого равен текущему значению переменной-счетчика «К».
Далее в шаге 704, значение счетчика «К» увеличивается на единицу.
Далее в шаге 705 осуществляется проверка условия на превышение значения переменной-счетчика «К» длины массива из «N» элементов. Если «К» меньше либо равно «N» (K≤N), то осуществляется переход в шаг 702. В противном случае (если «К» больше «N» (K>N), то осуществляется переход в шаг 706. В шаге 706 осуществляется поиск минимального и максимального значений в массиве чисел из «N» элементов. Найденные значения записываются в переменные «МИН» и «МАКС» соответственно.
Далее в шаге 707 осуществляется вычисление разницы (переменная «РАЗНИЦА») переменных «МИН» и «МАКС»: «РАЗНИЦА» = «МАКС» - «МИН».
Далее в шаге 708 осуществляется вычисление значения переменной «СИГНАЛ», которое вычисляется по следующей формуле (формуле вычисления переменной «СИГНАЛ»: «СИГНАЛ» = «X» * «РАЗНИЦА» + «Y» * «СИГНАЛ'» (т.е. переменная «СИГНАЛ» равна сумме произведения переменной «X» на переменную «РАЗНИЦА» и произведения переменной «Y» на переменную «СИГНАЛ'» («СИГНАЛ ШТРИХ»)).
Данное выражение (формула) позволяет сглаживать сигнал электромиограммы (также называемого ЭМГ-сигналом или сигналом ЭМГ), в частности, текущее значение переменной «СИГНАЛ» зависит от нового вычисленного значения переменной «РАЗНИЦА» и предыдущего значения переменной «СИГНАЛ», которая обозначается как «СИГНАЛ'» («СИГНАЛ ШТРИХ»), которые берутся с весовыми коэффициентами X и Y соответственно. Иными словами, текущее значение сигнала зависит от предыдущего, что позволяет сглаживать резкие броски сигнала (так называемые «спайки», от англ. «spikes»), тем самым реализуя фильтр низких частот (в частности аналог фильтра низких частот) и повышая стабильность работы обработки алгоритма к данному типу помех, которые часто встречаются при практическом использовании данного устройства.
После того, как значение переменной «ИТОГ» (переменная «ИТОГ» содержит значение управляющих сигналов управляемым устройством 160) вычислено, упомянутое значение команд(ы) управления (значение переменной «ИТОГ»), как описано в рамках настоящего изобретения, отправляется (передается) на управляемое устройство 160. Отправка (передача) упомянутого значения «ИТОГ» (значений управляющих сигналов) может осуществляться посредством проводов или по радиоканалу (в частном случае, реализованным радиомодулем 561), например, посредством Bluetooth-радиомодуля и т.д. Стоит отметить, что оцифровка данных посредством АЦП, накопление массива и т.д. осуществляется циклически. По мере накопления «N» отсчетов вычисляются значения переменной «ИТОГ» (управляющие сигналы) и передаются на управляемое устройство 160.
Стоит отметить, что передаваемые (отправляемые) управляющие сигналы на управляемое устройство 160 могут иметь следующую структуру и содержать следующие данные:
<Название сенсора> <цифровое значение> <символ переноса строки>,
где
-<название сенсора> содержит название (или идентификатор) одного из описываемых сенсоров, который используется управляемым устройством 160 для идентификации сенсора, данные с которого были переданы в центральный модуль 110, обработаны центральным модулем 110 и переданы на управляемое устройство 160 в виде управляющих сигналов;
-<цифровое значение> является значением переменной «ИТОГ», содержащей значение управляющих сигналов;
-<символ переноса строки> является продолжением печати текста с новой строки (https://ru.wikipedia.org/wiki/Перевод_строки).
В частном случае, по крайней мере, один управляющий сигнал, отправляемый на управляемое устройство 160 может иметь формат сообщения, в частности являться текстовым сообщением, например, по крайней мере, в виде одной строки.
Каждая такая строка может быть обработана управляемым устройством 160, в частности, по крайней мере, одной частью управляемого устройства, например, микроконтроллером, бортовым компьютером и т.д., следующим образом:
- осуществляется парсинг (от англ. parsing) строки (разбиение на составляющие) упомянутой строки;
- в зависимости от сценария управления управляемым устройством 160 цифровое значение сигнала преобразуется, по крайней мере, в одну команду управления. Так, например, множество значений цифрового значения управляющего сигнала может быть преобразовано в такие команды, как множество значений угла поворота (например, значение переменной «ИТОГ» (значение управляющей команды), в частности, от 0 до 255 может быть преобразовано в управляющую команду - угол поворота в диапазоне от 0 до 270 градусов) одного из элементов управляемого устройства 160, например, сервопривода, т.е., в частном случае, напряжение мышцы пользователя (человека) приводит к повороту сервопривода на управляемом устройстве 160.
Как было сказано выше, константы «X» и «Y» удовлетворяют условию нормировки: X+Y=1, т.е. сумма констант «X» и «Y» равна единице.
Далее в шаге 709 осуществляется присваивание значения СИГНАЛ' (СИГНАЛ ШТРИХ) значению СИГНАЛ (т.е. СИГНАЛ*=СИГНАЛ), после чего в шаге 710 осуществляется сброс значения переменной-счетчика «К» на значение, равное единице.
Далее в шаге 711 в переменную "ИТОГ" осуществляется запись значения переменной «СИГНАЛ» и осуществляется возврат к шагу 702. Таким образом, в переменную «ИТОГ» записывается значение управляющего сигнала, в частном случае, пропорциональное значению амплитуды ЭМГ-сигнала.
На ФИГ. 8 показана блок-схема обработки сигнала электромиограммы микроконтроллером центрального модуля, согласно одному из вариантов осуществления настоящего изобретения, в частности, показана блок-схема частного случая пропорциональной обработки сигнала электромиограммы, в частности обработки сигнала электромиограммы для логического (триггерного) управления, при котором упомянутый диапазон возможных формируемых числовых значений состоит из двух чисел, в частности, логической единицы и нуля.
В шаге 801 осуществляется создание и начальная инициализация структур данных, необходимых для работы описываемой обработки данных, в частности, осуществляется создание:
- числового массива из «N» элементов для хранения отсчетов от АЦП, причем числовой массив изначально заполняется нулями, a «N» может равняться 32;
- числовой переменной-счетчика «К» для подсчета числа отсчетов АЦП, причем значение числовой переменной-счетчика «К» изначально равно единице
(«1»);
- переменных «СИГНАЛ» и «СИГНАЛ'» («СИГНАЛ ШТРИХ»), причем СИГНАЛ' инициализируется нулевым значением;
- констант «X» и «Y», сумма которых равняется единице (например, «X» может равняться 0.6, a «Y» может равняться 0.4, или «X» может равняться 0.5, а «Y» может равняться 0.5 и т.д.), т.е. удовлетворять требованию (условию нормировки): X+Y=1.
В шаге 802 осуществляется считывание аналогового сигнала посредством аналогово-цифрового преобразователя (АЦП) микроконтроллера 551 центрального модуля 110 и результатом оцифровки посредством упомянутого АЦП в (упомянутый) некоторый момент времени такого полученного аналогового сигнала является цифрового значение аналогового сигнала («отсчет»), формируемого посредством АЦП.
В частном случае, нумерация элементов числового массива из «N» отсчетов начинается с единицы.
В шаге 803 «отсчет» (цифровое значение) из шага 802 дописывается в массив из «N» отсчетов. Запись осуществляется в элемент, номер которого равен текущему значению переменной-счетчика «К».
Далее в шаге 804, значение счетчика «К» увеличивается на единицу.
Далее в шаге 805 осуществляется проверка условия на превышение значения переменной-счетчика «К» длины массива из «N» элементов. Если «К» меньше либо равно «N» (K≤N), то осуществляется переход в шаг 802. В противном случае (если «К» больше «N» (K>N), то осуществляется переход в шаг 806. В шаге 806 осуществляется поиск минимального и максимального значений в массиве чисел из «N» элементов. Найденные значения записываются в переменные «МИН» и «МАКС» соответственно.
Далее в шаге 807 осуществляется вычисление разницы (переменная «РАЗНИЦА») переменных «МИН» и «МАКС»: «РАЗНИЦА» = «МАКС» - «МИН».
Далее в шаге 808 осуществляется вычисление значения переменной «СИГНАЛ», которое вычисляется по следующей формуле (формуле вычисления переменной «СИГНАЛ»: «СИГНАЛ» = «X» * «РАЗНИЦА» + «Y» * «СИГНАЛ'» (т.е. переменная «СИГНАЛ» равна сумме произведения переменной «X» на переменную «РАЗНИЦА» и произведения переменной «Y» на переменную «СИГНАЛ'» («СИГНАЛ ШТРИХ»)).
Данное выражение (формула) позволяет сглаживать сигнал
электромиограммы (также называемого ЭМГ-сигналом или сигналом ЭМГ), в частности, текущее значение переменной «СИГНАЛ» зависит от нового вычисленного значения переменной «РАЗНИЦА» и предыдущего значения переменной «СИГНАЛ», которая обозначается как «СИГНАЛ'» («СИГНАЛ ШТРИХ»), которые берутся с весовыми коэффициентами X и Y соответственно. Иными словами, текущее значение сигнала зависит от предыдущего, что позволяет сглаживать резкие броски сигнала (так называемые «спайки», от англ. «spikes»), тем самым реализуя фильтр низких частот (в частности аналог фильтра низких частот) и повышая стабильность работы обработки алгоритма к данному типу помех, которые часто встречаются при практическом использовании данного устройства.
После того, как значение переменной «ИТОГ» (переменная «ИТОГ» содержит значение управляющих сигналов управляемым устройством 160) вычислено, упомянутое значение команд(ы) управления (значение переменной «ИТОГ»), как описано в рамках настоящего изобретения, отправляется (передается) на управляемое устройство 160. Отправка (передача) упомянутого значения «ИТОГ» (значений управляющих сигналов) может осуществляться посредством проводов или по радиоканалу (в частном случае, реализованным радиомодулсм 561), например, посредством Bluetooth-радиомодуля и т.д. Стоит отметить, что оцифровка данных посредством АЦП, накопление массива и т.д. осуществляется циклически. По мере накопления «N» отсчетов вычисляются значения переменной «ИТОГ» (управляющие сигналы) и передаются на управляемое устройство 160.
Стоит отметить, что передаваемые (отправляемые) управляющие сигналы на управляемое устройство 160 могут иметь следующую структуру и содержать следующие данные:
<Названис сснсора><цифровое значение> <символ переноса строки>,
где
- <название сенсора> содержит название (или идентификатор) одного из описываемых сенсоров, который используется управляемым устройством 160 для идентификации сенсора, данные с которого были переданы в центральный модуль 110, обработаны центральным модулем 110 и переданы на управляемое устройство 160 в виде управляющих сигналов;
- <цифровое значение> является значением переменной «ИТОГ», содержащей значение управляющих сигналов;
-<символ переноса строки> является продолжением печати текста с новой строки (https://ru.wikipedia.org/wiki/Перевод_строки).
В частном случае, по крайней мере, один управляющий сигнал, отправляемый на управляемое устройство 160 может иметь формат сообщения, в частности являться текстовым сообщением, например, по крайней мере, в виде одной строки.
Каждая такая строка может быть обработана управляемым устройством 160, в частности, по крайней мере, одной частью управляемого устройства, например, микроконтроллером, бортовым компьютером и т.д., следующим образом:
- осуществляется парсинг (от англ. parsing) строки (разбиение на составляющие) упомянутой строки.
Причем, в частном случае осуществляется управление управляемыми устройствами, которые могут находиться в двух состояния, в частности, принимать две управляющие команды.
Как было сказано выше, константы «X» и «Y» удовлетворяют условию нормировки: X+Y=1, т.е. сумма констант «X» и «Y» равна единице.
Далее в шаге 809 осуществляется присваивание значения СИГНАЛ' (СИГНАЛ ШТРИХ) значению СИГНАЛ (т.е. СИГНАЛ*=СИГНАЛ), после чего в шаге 810 осуществляется сброс значения переменной-счетчика «К» на значение, равное единице.
Далее в шаге 811 осуществляется сравнение значения переменной «СИГНАЛ» со значением «ПОРОГ» ((предустановленным) пороговым значением переменной «ПОРОГ») микроконтроллер 551 осуществляет формирование логических (триггерных) значений переменной «ИТОГ». Если в шаге 811 значение переменной «СИГНАЛ» больше значения переменной «ПОРОГ», то переменной «ИТОГ» присваивается значение, равное единице («1») в шаге 812, и далее осуществляется переход в шаг 802. В противном случае, если в шаге 811 значение переменной «СИГНАЛ» меньше значения переменной «ПОРОГ», то переменной «ИТОГ» присваивается значение, равное единице («1») в шаге 813 и далее осуществляется переход в шаг 802.
В заключение следует отметить, что приведенные в описании сведения являются примерами, которые не ограничивают объем настоящего изобретения, определенного формулой. Специалисту в данной области становится понятным, что могут существовать и другие варианты осуществления настоящего изобретения, согласующиеся с сущностью и объемом настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления устройствами посредством обработки сигналов ЭЭГ | 2019 |
|
RU2717213C1 |
| Система и способ для безманжетного определения артериального давления | 2017 |
|
RU2759708C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНОЙ БИОНИЧЕСКОЙ КОНЕЧНОСТЬЮ | 2016 |
|
RU2635632C1 |
| СПОСОБ И СИСТЕМА УПРАВЛЕНИЯ ЭЛЕКТРОННЫМИ УСТРОЙСТВАМИ С ПОМОЩЬЮ ЭЛЕКТРОМИОГРАФИЧЕСКОГО УСТРОЙСТВА СЧИТЫВАНИЯ | 2017 |
|
RU2683859C1 |
| Способ формирования изображений с дополненной и виртуальной реальностью с возможностью взаимодействия внутри виртуального мира, содержащего данные виртуального мира | 2021 |
|
RU2764375C1 |
| Цифровой обучающий комплекс для подготовки к перспективным профессиям в области нейрофизиологии | 2019 |
|
RU2698994C1 |
| СПОСОБ БИОНИЧЕСКОГО УПРАВЛЕНИЯ ТЕХНИЧЕСКИМИ УСТРОЙСТВАМИ | 2017 |
|
RU2673151C1 |
| Способ оценки произвольного внимания на основе глазодвигательных показателей и амплитудно-частотных характеристик электроэнцефалограммы | 2019 |
|
RU2722447C1 |
| Способ и система для определения потенциала развития высших психических функций и навыков человека посредством нейрометрии | 2017 |
|
RU2671869C1 |
| Способ для оценки чувства ритма человека | 2018 |
|
RU2685774C1 |
Способ для управления устройствами посредством обработки электрических сигналов, возникающих в мышцах человека, относится к медицине. При этом сенсор электромиограммы регистрирует электрический сигнал, возникающий в мышце пользователя при ее напряжении. Регистрирование сигнала осуществляется многоразовыми неинвазивными электродами на поверхности кожи пользователя. Сенсор обрабатывает зарегистрированный электрический сигнал, в процессе обработки осуществляется усиление и фильтрация. Микроконтроллер сенсора электромиограммы преобразовывает сигнал в цифровое значение аналогово-цифровым преобразователем, формирует пакет данных, который содержит название сенсора электромиограммы и цифровое значение сигнала, передает сформированный пакет данных в вычислительный модуль. Вычислительный модуль накапливает массив цифровых значений сигнала, рассчитывает величину электрической мышечной активности пользователя после накопления количества цифровых значений сигнала, вычисляет разницу между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала и умножает полученную разницу упомянутых значений на числовой множитель, принимающий значения от нуля до единицы и определяющий степень вклада вычисленного значения сигнала по отношению к вычисленному значению сигнала ранее, и прибавляет к полученной разнице между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала, умноженного на единицу минус упоминаемый данный числовой множитель, принимающий значение от нуля до единицы. При вычислении разницы между максимальным и минимальным значениями упомянутого сигнала в первый раз, при отсутствии вычисленной ранее разницы между максимальным и минимальным значениями сигнала в накопленном количестве цифровых значений сигнала, к вычисленной разнице между максимальным и минимальным значениями сигнала в накопленном количестве цифровых значений сигнала, умноженной на числовой множитель, принимающий значения от нуля до единицы и определяющий степень вклада вычисленного значения сигнала по отношению к вычисленному значению сигнала ранее, ничего не прибавляется. Радиомодуль предает управляющий сигнал на управляемое устройство для управления управляемым устройством или элементом управляемого устройства. Достигается повышение точности и скорости обработки электрических сигналов, возникающих в мышцах человека, и управление устройствами. 5 з.п. ф-лы, 8 ил.
1. Способ для управления устройствами посредством обработки электрических сигналов, возникающих в мышцах человека, в котором:
- сенсором электромиограммы осуществляется регистрирование по крайней мере одного электрического сигнала, возникающего по крайней мере в одной мышце пользователя при ее напряжении пользователем, причем регистрирование упомянутого сигнала осуществляется многоразовыми неинвазивными электродами сенсора электромиограммы непосредственно на поверхности кожи пользователя в местах размещения электродов сенсора электромиограммы;
- сенсором электромиограммы осуществляется обработка по крайней мере одного зарегистрированного электрического сигнала, причем в процессе упомянутой обработки осуществляется:
а) предварительное усиление усилителем зарегистрированного электрического сигнала;
б) фильтрация фильтром высокой частоты сигнала из (а);
в) фильтрация полосно-заграждающим фильтром сигнала из (б);
г) фильтрация фильтром нижних частот сигнала из (в);
д) окончательное усиление сигнала из (г);
- аналогово-цифровым преобразователем микроконтроллера сенсора электромиограммы осуществляется преобразование сигнала из (д) в цифровое значение сигнала;
- микроконтроллером сенсора электромиограммы осуществляется формирование пакета данных, который содержит название сенсора электромиограммы и упомянутое цифровое значение сигнала;
- микроконтроллером сенсора электромиограммы осуществляется передача упомянутого сформированного пакета данных в вычислительный модуль;
- вычислительным модулем осуществляется обработка пакета данных, которая включает:
- осуществление накапливания массива упомянутых цифровых значений сигнала;
- осуществление расчета величины электрической мышечной активности пользователя после накопления количества цифровых значений сигнала;
- осуществление вычисления разницы между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала и осуществление умножения полученной разницы упомянутых значений на числовой множитель, принимающий значения от нуля до единицы и определяющий степень вклада вычисленного значения сигнала по отношению к вычисленному значению сигнала ранее, и прибавления к полученной разнице между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала, умноженного на единицу минус упоминаемый данный числовой множитель, принимающий значение от нуля до единицы,
причем при вычислении разницы между максимальным и минимальным значениями упомянутого сигнала в первый раз, при отсутствии вычисленной ранее разницы между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала, к вычисленной разнице между максимальным и минимальным значениями упомянутого сигнала в накопленном количестве цифровых значений сигнала, умноженной на числовой множитель, принимающий значения от нуля до единицы и определяющий степень вклада вычисленного значения сигнала по отношению к вычисленному значению сигнала ранее, ничего не прибавляется;
- радиомодулем осуществляется передача по крайней мере одного управляющего сигнала на управляемое устройство для управления таким управляемым устройством или по крайней мере одним элементом такого управляемого устройства.
2. Способ по п. 1, характеризующийся тем, что частота среза фильтра высокой частоты составляет 0.02 Гц.
3. Способ по п. 1, характеризующийся тем, что частота полосно-заграждающего фильтра составляет 50 Гц.
4. Способ по п. 1, характеризующийся тем, что частота среза фильтра нижних частот частоты составляет 100 Гц.
5. Способ по п. 1, характеризующийся тем, что управляющий сигнал формируется посредством использования в качестве такового рассчитанной величины электрической мышечной активности пользователя для осуществления пропорционального управления управляемым устройством или по крайней мере одним элементом такого управляемого устройства, причем величина управляющего сигнала пропорциональна рассчитанной величине электрической мышечной активности пользователя.
6. Способ по п. 1, характеризующийся тем, что управляющий сигнал равен одному из двух значений: логическому «нулю» или логической «единице», причем выбор логической «единицы» осуществляется при превышении или равенстве величины электрической мышечной активности пользователя определенного порогового предустановленного пользователем значения и логическому «нулю» при невыполнении этого условия.
| US 2012221177 A1, 30.08.2012 | |||
| WO 2017204694 A1, 30.11.2017 | |||
| US 2016744181 A1, 17.03.2016 | |||
| DE 102005021412 A1, 09.11.2006 | |||
| СИСТЕМА УПРАВЛЕНИЯ ПРОТЕЗОМ ОТ КУЛЬТИ | 2006 |
|
RU2419399C2 |
| RU 95107479 A1, 10.02.1997. | |||

