ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Изобретение относится к устройству контроля сна и способу измерения биофизических сигналов живого существа, находящегося на матрасе. Биофизические переменные извлекаются из биологических сигналов. Состояние сна субъекта выводится из биофизических переменных.
УРОВЕНЬ ТЕХНИКИ
Документ US 6280392 описывает сенсорную простыню, имеющую сеть из множества датчиков нагрузки, помещенных под ребенка, контроль которого осуществляется (и контактирующих с ним). Сенсорная простыня является частью системы контроля состояния ребенка для контроля состояния здоровья спящего ребенка, не беспокоя его. Сигнал дыхания ребенка формируется из сигналов нагрузки датчиков нагрузки, по которым определяется состояние дыхания. Кроме того, другие биофизические сигналы, такие как движения тела и вес, также измеряются по сигналам нагрузки.
В указанном документе описана сенсорная простыня, имеющая высокую пространственную плотность датчиков нагрузки, с тем чтобы позу ребенка можно было вывести посредством измерения давления, вызываемого ребенком в различных частях тела ребенка. Кроме того, вследствие высокой пространственной плотности датчиков нагрузки, имеется множество датчиков нагрузки, контактирующих с ребенком и предоставляющих соответствующее множество сигналов нагрузки, по которым может быть измерен сигнал дыхания ребенка и другие биофизические сигналы.
В WO 2011/008175 A1 описан способ контроля пациента с применением группы датчиков давления. Способ включает в себя этапы: определения значения параметра выбора для каждого датчика давления из группы; выбора еще одного из датчиков давления на основании соответствующих значений параметра выбора; и измерения показателя жизнедеятельности пациента на основании данных, полученных от указанных одного или более выбранных датчиков давления.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Сенсорная простыня предшествующего уровня техники обычно помещается на кровать, покрывая поверхность кровати. Недостатком предшествующего уровня техники, следовательно, является то, что требуется множество датчиков нагрузки для контакта с ребенком в произвольном положении на кровати. Следовательно, множество датчиков нагрузки требуется для измерения биофизического сигнала ребенка независимо от положения ребенка на кровати.
Цель изобретения состоит в преодолении этих недостатков предшествующего уровня техники посредством предоставления устройства контроля сна, в котором используется только несколько датчиков для точного измерения относящихся ко сну биофизических переменных ребенка независимо от положения ребенка на кровати.
Раскрыто устройство контроля сна для измерения биофизической переменной живого существа, при этом устройство содержит датчики, представляющие собой по меньшей мере два датчика давления, которые размещены в пространстве в виде предварительно заданной плоской геометрической фигуры, при этом датчики размещены таким образом, чтобы они контактировали с опорным слоем для поддержки живого существа во время сна и генерировали соответствующие сигналы датчиков в качестве реакции на давление, оказываемое живым существом через опорный слой на датчики, при этом устройство контроля сна содержит блок обработки, выполненный с возможностью выполнения: (a) функции локализации, сконфигурированной для определения положения живого существа на опорном слое относительно датчиков на основании разностей между соответствующими сигналами датчиков посредством выполнения процедуры многопозиционного измерения на основании разности фаз между соответствующими сигналами датчиков или посредством выполнения процедуры трехстороннего измерения на основании разности величин между соответствующими сигналами датчиков, и (b) функции определения, сконфигурированной для определения коэффициента затухания величины на основании определенного положения живого существа и положения одного из датчиков, и определения биофизической переменной на основании сигнала датчика, сгенерированного посредством одного или более датчиков, и коэффициента затухания величины.
Устройство контроля сна измеряет биофизическую переменную, которая характеризует соответствующее биофизическое состояние живого существа, когда живое существо находится на поддерживающем слое. Живое существо может являться ребенком, взрослым человеком или даже животным. Например, устройство контроля сна измеряет частоту дыхания и интенсивность дыхания, которые характеризуют состояние дыхания ребенка, лежащего на матрасе.
Каждый из датчиков реагирует на давление, вызываемое живым существом через опорный слой, посредством генерации сигнала датчика. Датчики размещены в пространстве в виде предварительно заданной геометрической фигуры таким образом, чтобы положения датчиков относительно друг друга были фиксированными и известными устройству контроля сна. Кроме того, предварительно заданная геометрическая фигура является планарной с целью обеспечения настройки датчиков в слое, при этом сам слой имеет плоскую форму по определению.
Блок обработки определяет биофизическую переменную живого существа с учетом положения живого существа относительно датчиков. Датчики находятся в различных положениях на опорном слое, и, следовательно, расстояние между датчиком и положением живого существа является различным для каждого датчика. Волна давления, вызываемого живым существом, распространяется через опорный слой на расстояние от живого существа до датчика и затухает на величину, которая возрастает с расстоянием. Когда живое существо вызывает волну давления, каждый датчик воспринимает волну давления, затухшую на различную величину. В качестве реакции каждый датчик генерирует сигнал датчика с различной величиной.
Блок обработки определяет биофизическую переменную по сигналам датчика с применением функции локализации и функции определения.
Функция локализации определяет положение живого существа (относительно датчиков) на основании разностей между сигналами датчиков. А именно, функция локализации вычисляет указанное положение по разностям между сигналами датчиков посредством выполнения процедуры многопозиционного измерения на основании разности фаз или посредством выполнения процедуры трехстороннего измерения на основании разности величин.
Функция определения определяет фактор затухания величины, отражающий затухание давления, распространяющегося из положения живого существа (определенного посредством функции локализации) в положении датчика. Функция определения затем определяет биофизическую переменную по сигналу датчика, включая поправку, основанную на факторе затухания величины. Например, величина сигнала датчика корректируется с использованием фактора затухания величины, биофизический сигнал (например, сигнал дыхания) отфильтровывается от скорректированного сигнала датчика, и биофизическая переменная извлекается из биофизического сигнала. Или, в качестве вариации предыдущего примера, биофизический сигнал извлекается из сигнала датчика, величина биофизического сигнала корректируется с использованием фактора затухания величины, и биофизическая переменная извлекается из скорректированного биофизического сигнала.
Также раскрывается способ измерения биофизической переменной живого существа,
с применением датчиков, представляющих собой по меньшей мере два датчика давления, которые размещены в пространстве в виде предварительно заданной плоской геометрической фигуры, при этом датчики размещены таким образом, чтобы они контактировали с опорным слоем для поддержки живого существа во время сна и генерировали соответствующие сигналы датчиков в качестве реакции на давление, оказываемое живым существом через опорный слой на датчики,
при этом способ включает в себя этапы: определения положения живого существа на опорном слое относительно датчиков на основании разностей между соответствующими сигналами датчиков посредством выполнения процедуры многопозиционного измерения на основании разности фаз между соответствующими сигналами датчиков или посредством выполнения процедуры трехстороннего измерения на основании разности величин между соответствующими сигналами датчиков, определения фактора затухания величины на основании определенного положения живого существа и положения одного из датчиков, и определения биофизической переменной на основании сигнала датчика, сгенерированного одним из датчиков, и фактора затухания величины.
Смысл изобретения состоит в том, что устройство контроля сна использует только несколько датчиков для измерения биофизической переменной живого существа, в результате чего измеренная биофизическая переменная является устойчивой к положению живого существа относительно датчиков. Дополнительное преимущество состоит в том, что изобретение выдает полезный промежуточный параметр для контроля сна, а именно, положение живого существа.
Специалистам в данной области техники будет понятно, что два или более указанных выше вариантов, реализаций и/или аспектов изобретения могут быть объединены любым способом, считающимся целесообразным.
Модификации и вариации мобильного устройства, способа и/или компьютерного программного продукта, которые соответствуют описанным модификациям и вариациям мобильного устройства, могут быть выполнены специалистом в данной области техники на основании настоящего описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения будут очевидны и будут прояснены со ссылкой на варианты осуществления, описанные ниже в настоящем описании.
На чертежах,
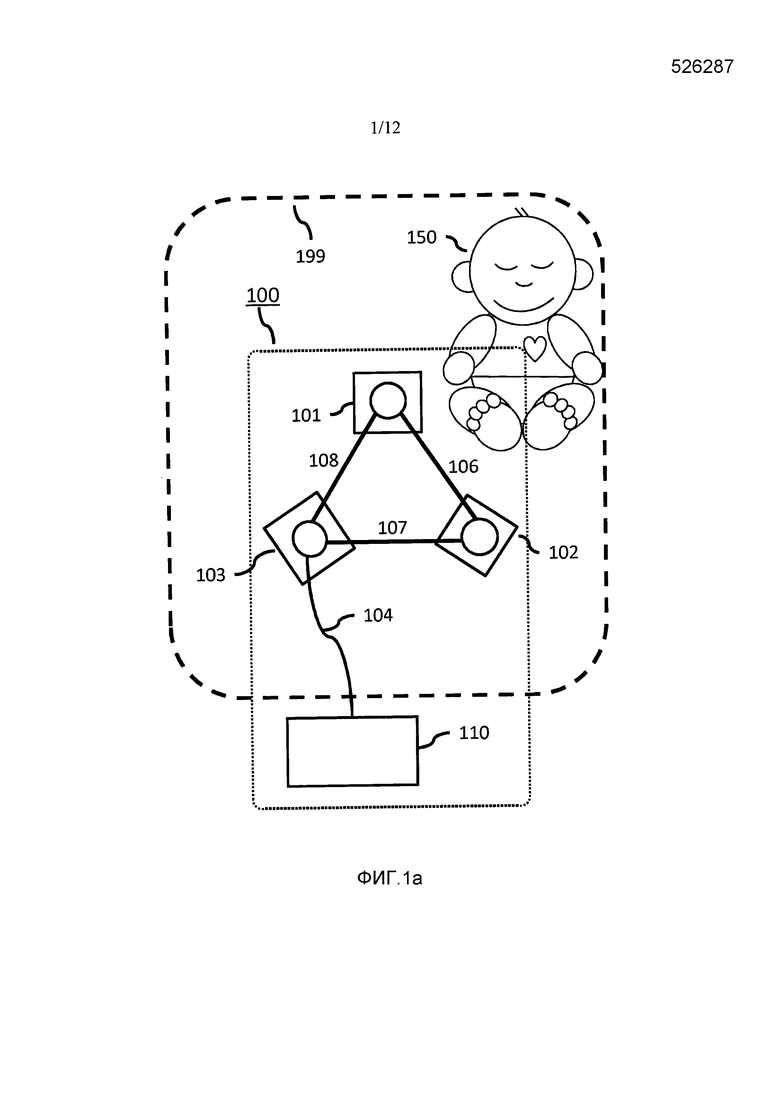
Фиг. 1a иллюстрирует устройство контроля сна в виде блочной диаграммы,
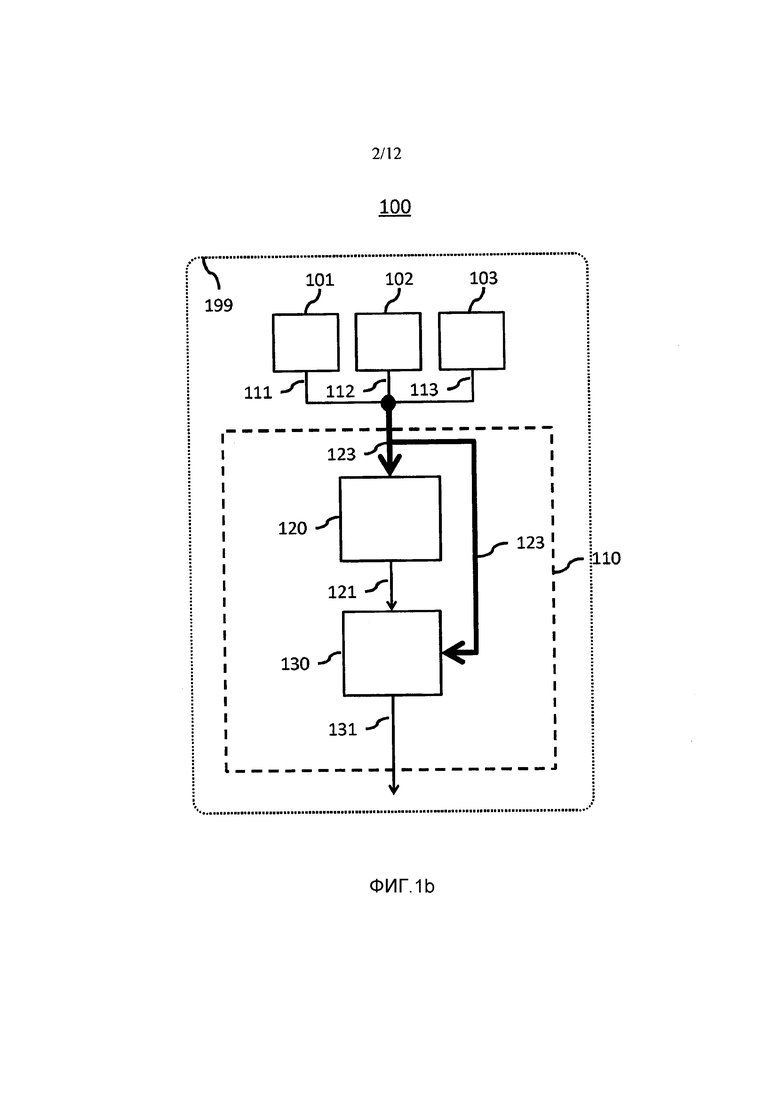
Фиг. 1b иллюстрирует устройство контроля сна, применяемое в матрасе, поддерживающем ребенка,
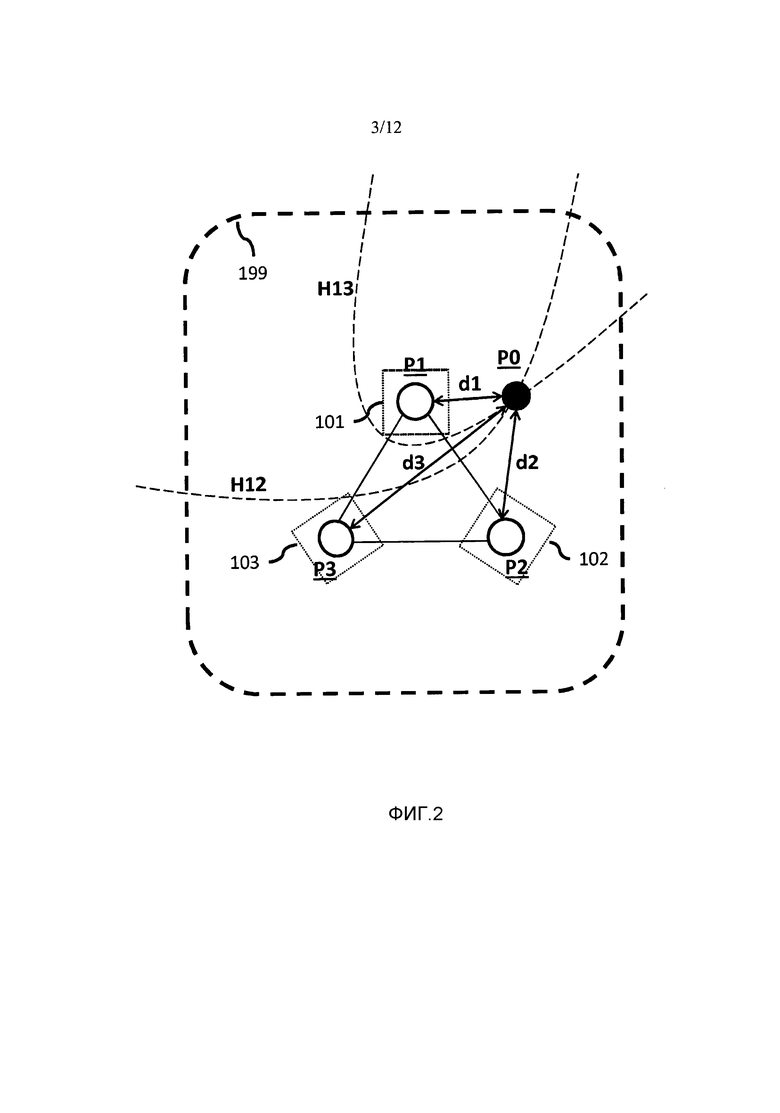
Фиг.2 иллюстрирует процедура многопозиционного измерения для определения местоположения ребенка на матрасе,
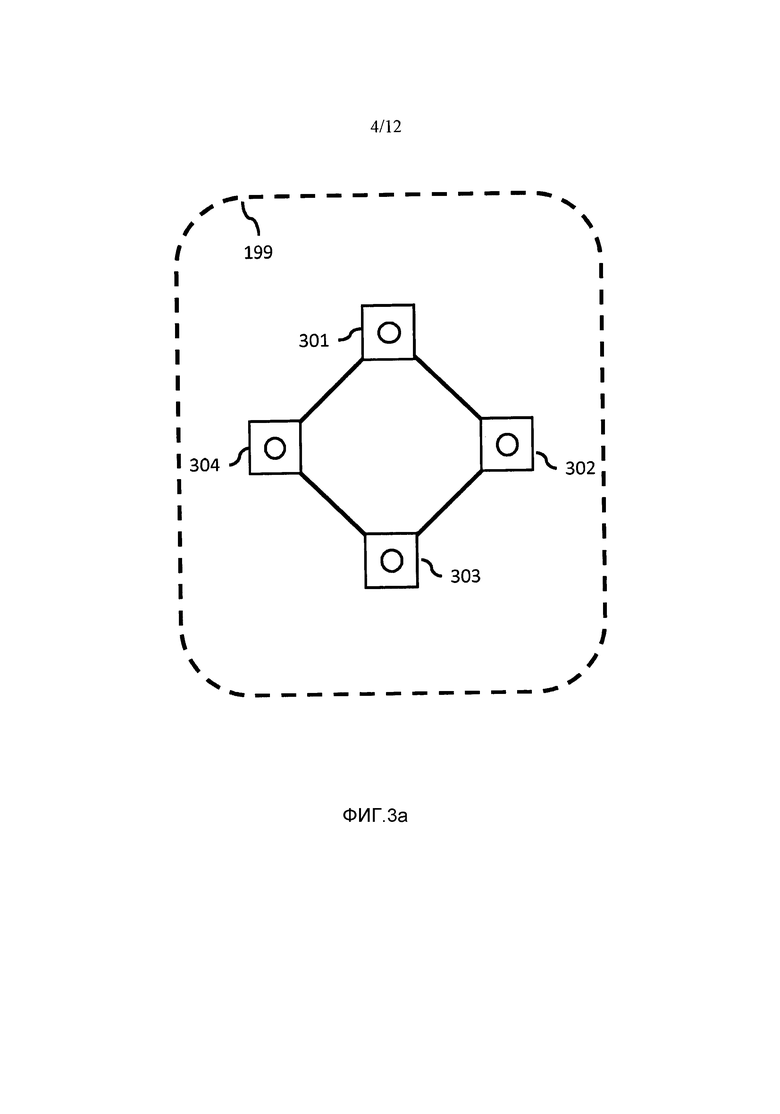
Фиг.3a иллюстрирует устройство контроля сна, использующее четыре датчика,
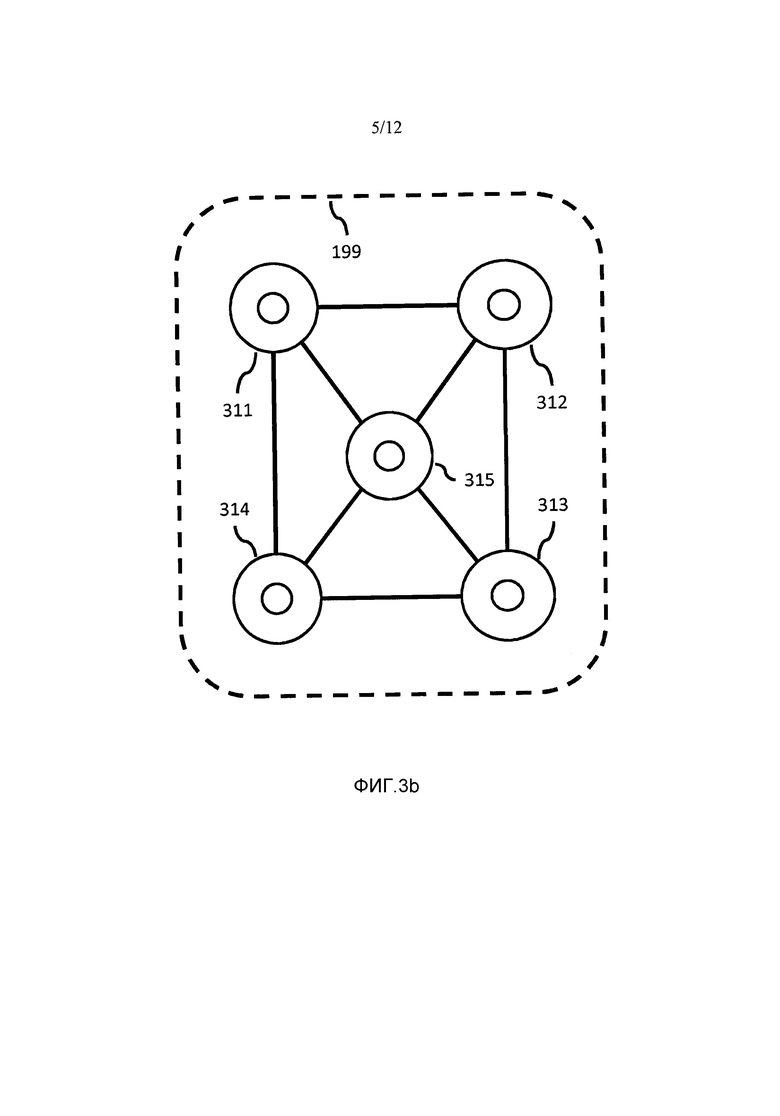
Фиг.3b иллюстрирует устройство контроля сна, использующее пять датчиков,
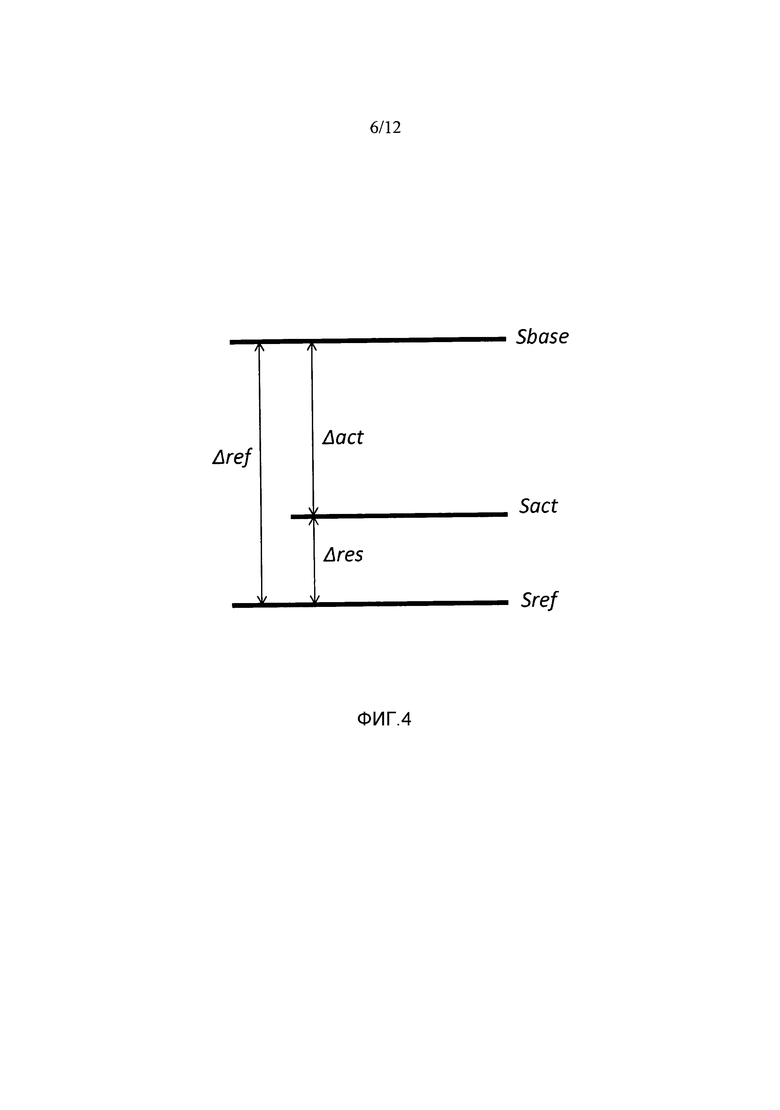
Фиг.4 иллюстрирует сдвиг сигнала датчика в соответствующих различных ситуациях,
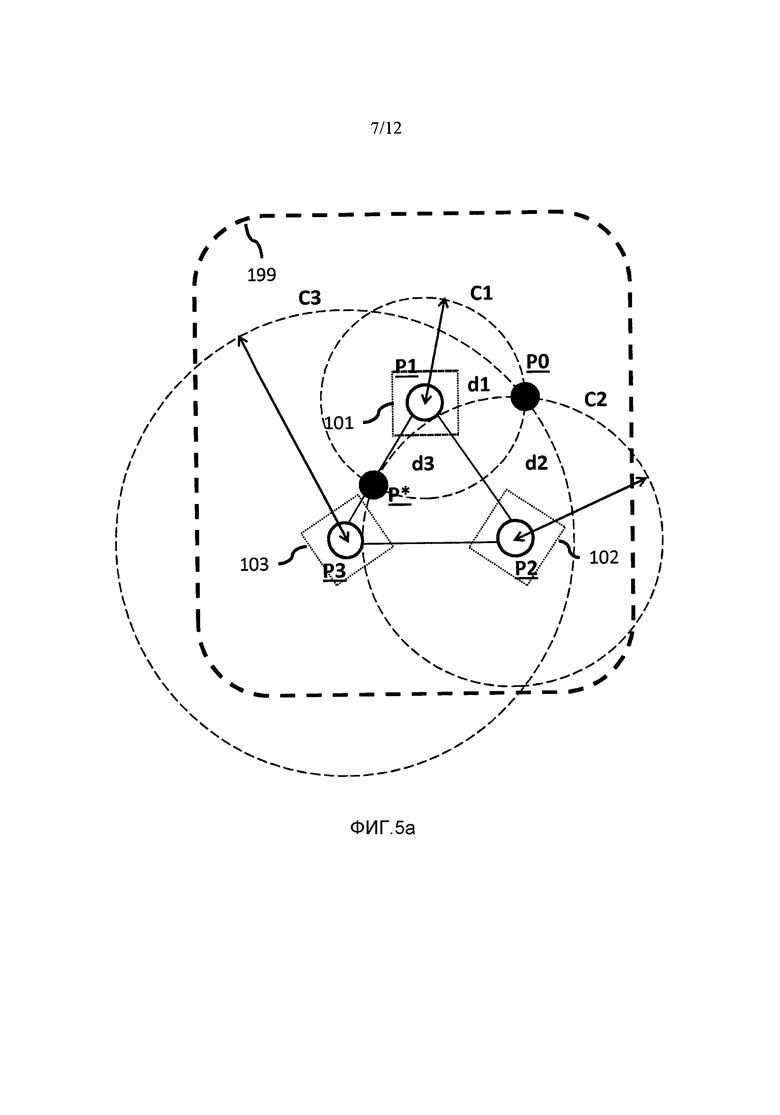
Фиг.5a иллюстрирует процедуры трехстороннего измерения для определения местоположения ребенка на матрасе,
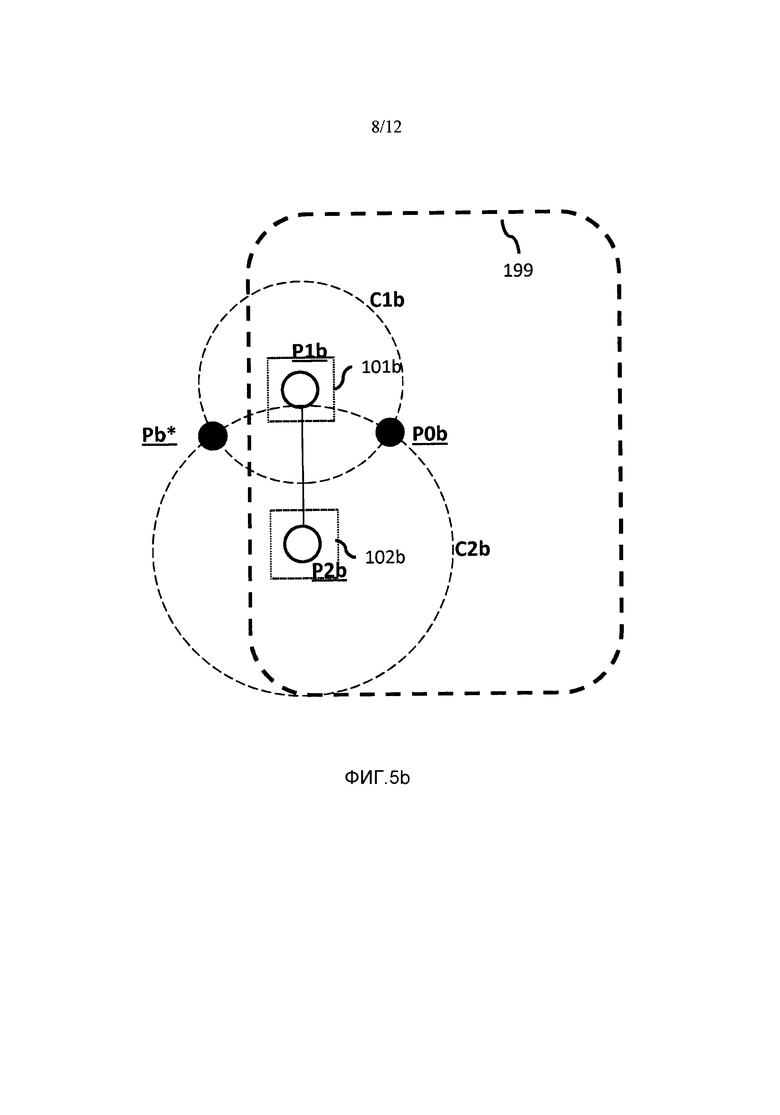
Фиг.5b иллюстрирует процедуры трехстороннего измерения с использованием только двух датчиков,
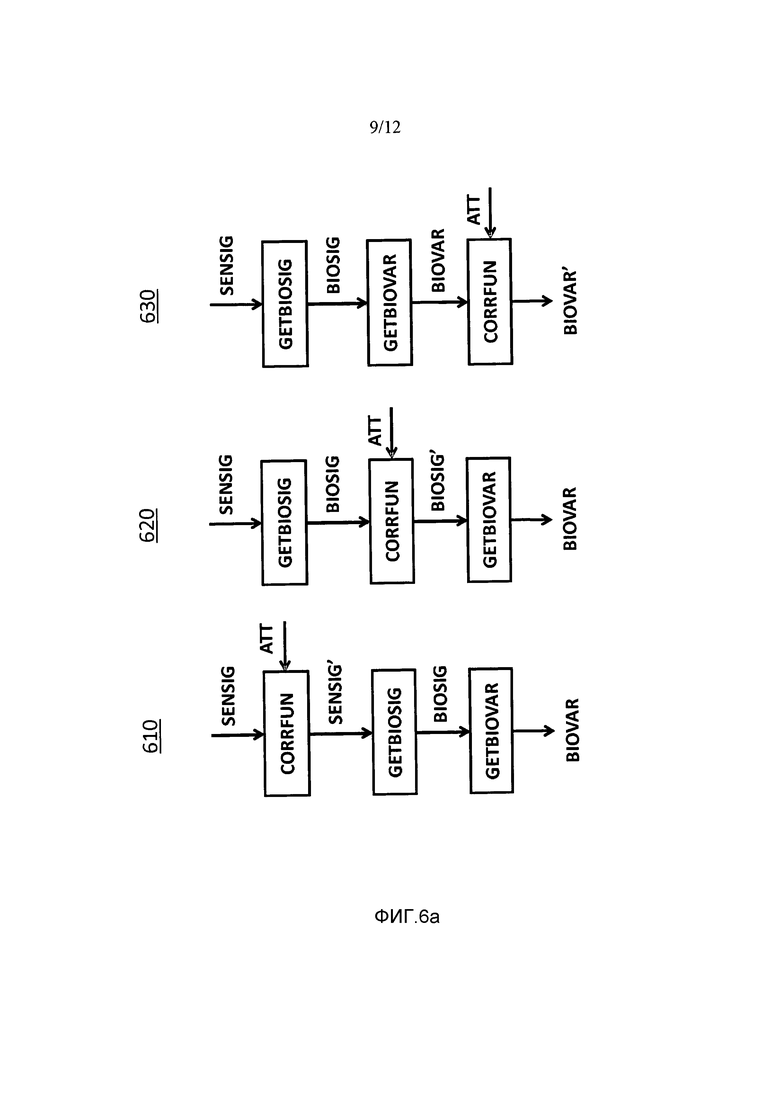
Фиг.6a иллюстрирует три процесса для определения биологической переменной по сигналу датчика,
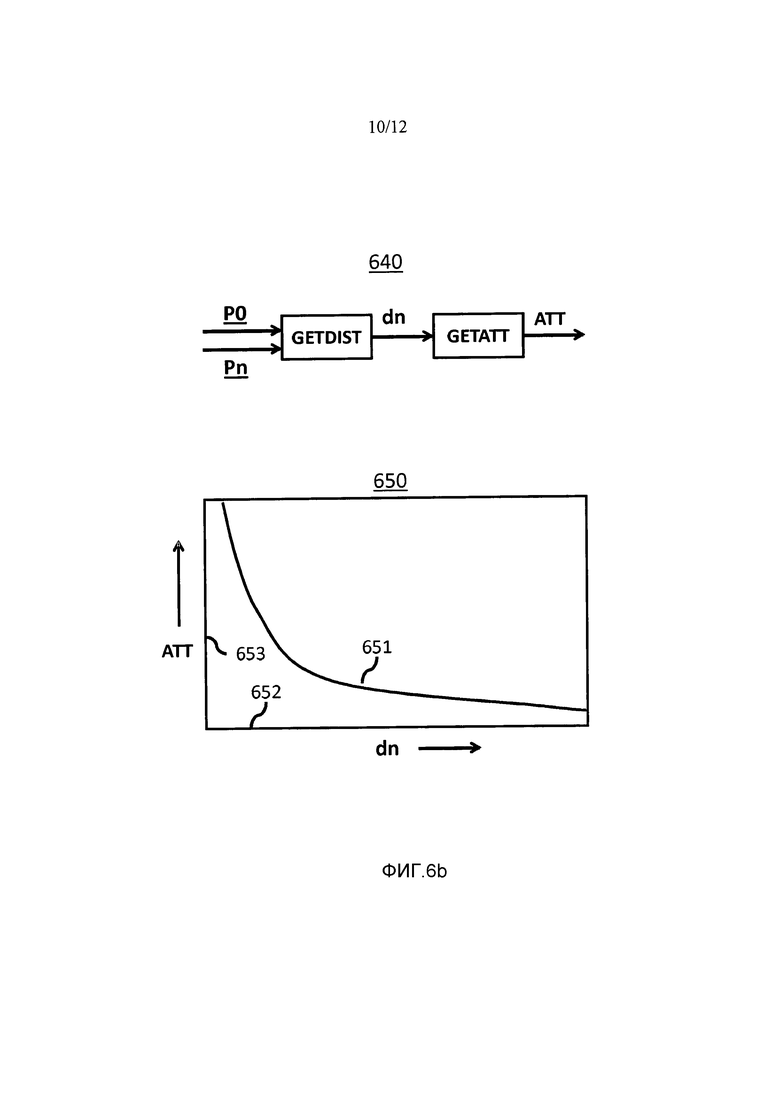
Фиг.6b иллюстрирует вспомогательный процесс, который определяет параметр затухания, используемый в трех процессах,
Фиг.7 иллюстрирует два состояния сна ребенка, и
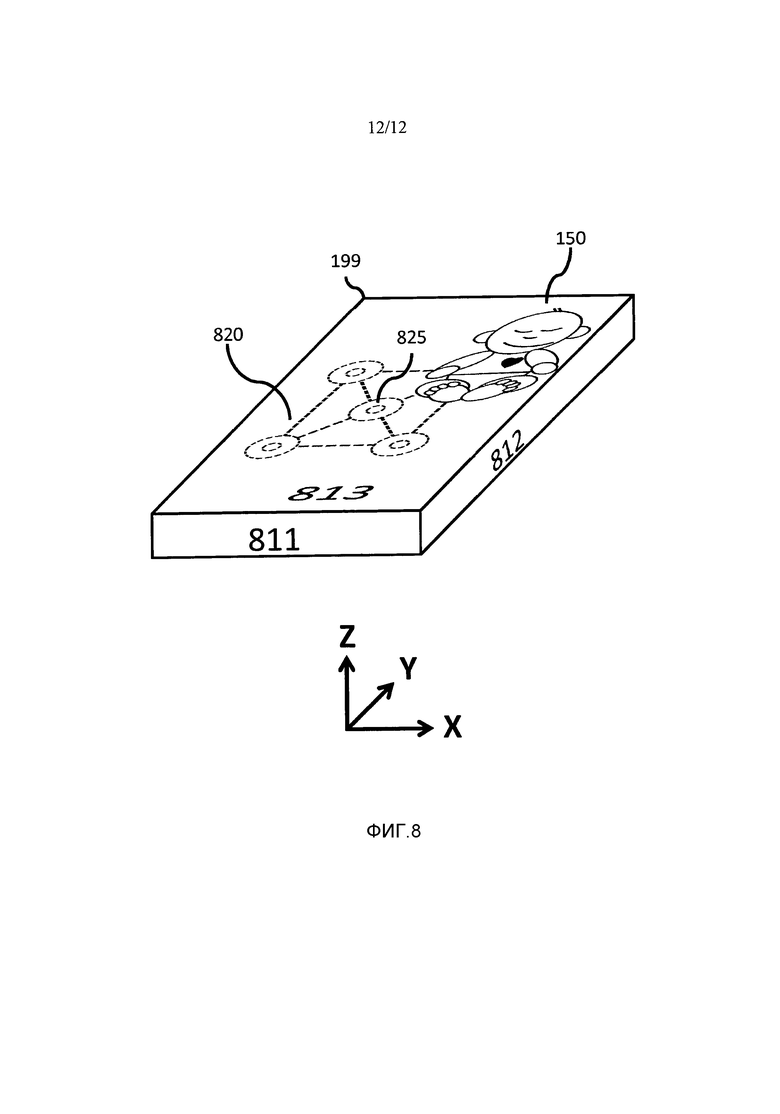
Фиг.8 иллюстрирует общую перспективу матраса, включая ребенка и устройство контроля сна, имеющего пять датчиков.
Следует понимать, что элементы, которые имеют одни и те же цифровые обозначения на различных фигурах, обладают одними и теми же структурными характеристиками и одними и теми же функциями. Если функция и/или структура такого элемента уже была объяснена, то отсутствует необходимость ее повторного объяснения в подробном описании.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Фиг. 1a иллюстрирует устройство 100 контроля сна, применяемое в матрасе 199, поддерживающем ребенка 150. Матрас 199 выполняет функцию опорного слоя, который поддерживает лежащего ребенка. Устройство 100 содержит три датчика (датчика давления) 101-103, которые генерируют соответствующие сигналы датчиков в качестве реакции на давлении, вызываемое ребенком 150 через матрас: сигнал датчика в датчике, таким образом, представляет давление в этом датчике. Давление может вызываться биофизическими действиями ребенка, такими как дыхание, баллистические движения сердца и движения тела. Датчики пространственно сконфигурированы в виде планарной геометрической фигуры таким образом, чтобы три датчика могли быть помещены внутрь матраса или непосредственно под матрас. Соединители 106-108 между тремя датчиками являются достаточно жесткими для поддержания планарной геометрической фигуры в ее предварительно заданной конфигурации.
Устройство 100 контроля сна содержит блок 110 обработки, который принимает сигналы датчиков от датчиков 101-103 через кабель 104 и через (вдоль) кабели, проходящие через соединители 106-108. Блок обработки 100 извлекает биофизическую переменную из сигналов датчиков, которые характеризуют биофизические действия ребенка. Например, биофизическая переменная представляет собой частоту дыхания и/или интенсивность дыхания, характеризующую состояние дыхания. Или биофизической переменной является частота сердцебиений и/или интенсивность сердцебиений, характеризующая состояние сердца. Или биофизической переменной является количество движений тела, которое может характеризовать состояние сна, например, большое продолжительное движение тела характеризует физическое беспокойство, или маленькие, короткие движения тела характеризуют состояние неглубокого сна.
Изобретение применяет (по меньшей мере) два датчика с целью измерения биофизической переменной, с тем чтобы она имела корректную величину, на основании следующего принципа. Величина давления в датчике является следствием двух факторов: (1) величины биофизического действия и (2) расстояния между датчиком и ребенком. Расстояние, таким образом, вызывает затухание давления, вызванного биофизическим действием. В целях получения величины биофизического действия, сигнал датчика должен быть скорректирован относительно затухания, вызываемого указанным расстоянием. Однако, такая коррекция невозможна при использовании одного датчика, поскольку указанное расстояние будет неизвестным и не может быть выведено из сигнала, сгенерированного посредством одного датчика. В изобретении, следовательно, применяется вычислительная процедура, в которой используются разности между сигналами датчиков от соответствующих датчиков для оценки указанного расстояния и для корректировки величины сигнала датчика на основании оцененного расстояния. Ниже две вычислительные процедуры объясняются подробнее: многопозиционная на основании разностей фазы/времени и трехпозиционная на основании разности величин.
Следует отметить, что термин «затухание» в текущем контексте относится к уменьшению величины давления или волны давления в результате распространения в пространстве через матрас (опорный слой). Также следует отметить, что, в текущем контексте, величина биофизического сигнала относится к тому же предмету, что и амплитуда биофизического сигнала. Величина биофизической переменной может (в зависимости от типа биофизической переменной) также иметь прямую зависимость от величины биофизического сигнала, например, когда интенсивность дыхания вычисляется как средняя величина биофизического сигнала за 30-секундный период. Напротив, величина скорости/частоты дыхания не связана с амплитудой сигнала дыхания.
Рассмотрим следующий пример из предыдущего абзаца. Действие дыхания ребенка создает волну давления, которая приводит к генерации соответствующих сигналов датчиков датчиками 101-103. Поскольку величина волны давления затухает с распространением волны через матрас, датчик рядом с ребенком (например, датчик 101) определяет большее давление, чем датчик, находящийся далеко от ребенка (например, датчик 103). Величина сигнал ближнего датчика, следовательно, больше, чем величина сигнала дальнего датчика. В результате, сигнал датчика с заданной величиной может соответствовать различным состояниям дыхания, например, следующим двум случаям: (1) тяжело дышащему ребенку (большая величина волны давления) от ребенка, находящегося далеко от датчика, и (2) нормально дышащему ребенку (меньшая величина волны давления) от ребенка, находящегося вблизи датчика. По сигналу только одного датчика невозможно различить эти состояния дыхания.
Фиг. 1b иллюстрирует устройство контроля сна 100 в виде блочной диаграммы. Устройство 100 контроля сна содержит три датчика 101-103, которые генерируют соответствующие сигналы датчиков в качестве реакции на давление, оказываемое ребенком. Сигналы датчиков передаются в блок 110 обработки через соответствующие кабели 111-113, соединяющиеся в кабель 123. Блок 110 обработки затем получает биофизическую переменную 131 из сигналов датчиков.
Блок 110 обработки содержит функцию 120 локализации и функцию 130 определения. Коротко говоря, функция 120 локализации определяет положение ребенка 121 по разностям между сигналами датчиков, тогда как функция 130 определения определяет биофизическую переменную 131, принимая во внимание определенное положение 121 ребенка 150 при вычислении величины биофизической переменной 131.
Фиг.2 иллюстрирует процедуру многопозиционного измерения для определения местоположения ребенка 150 на матрасе 199. Такой процесс реализуется посредством функции 120 локализации. Ситуация, изображенная на фиг. 2, соответствует фиг. 1a, показывающей три датчика 101-103 в матрасе 199. Положение P0 соответствует положению ребенка 150 на матрасе 199, тогда как положения P1, P2 и P3 соответствуют датчикам 101, 102 и 103, соответственно. Ребенок 150 выступает в качестве источника волн давления, вызывающих реакцию датчиков 101-103 в виде генерации соответствующих сигналов датчиков.
Волны давления, таким образом, распространяются от источника в положении P0 на расстояния d1, d2 и d3 датчик-источник к соответствующим датчикам 101, 102 и 103 в соответствующих положениях P1, P2 и P3. Свойства распространения волн давления зависят от свойства материала матраса 199. Свойства распространения включают в себя: (1) скорость распространения и (2) функцию затухания, которая описывает затухание величины волны давления как функцию расстояния (распространения). Поскольку положения датчиков P1-P3 различаются, то расстояния датчик-источник d1-d3 различаются и, следовательно, волна давления от источника дает волны давления в датчиках 101-103, которые различаются по величине и времени (задержки). Получаемые в результате сигналы датчиков, следовательно, различаются по величине и задержке. Например, когда датчики 101 и 103 генерируют соответствующие сигналы датчиков в качестве реакции на волну давления из источника, сигнал датчика от датчика 103 будет иметь большую задержку и меньшую величину по сравнению с сигналом датчика от датчика 101.
Многопозиционная процедура служит для вычисления положения источника по трем сигналам датчиков. Многопозиционная процедура основана на временных различиях между тремя сигналы датчиков (также обычно называемых временной разницей приема, или TDOA). Сигнал датчика от датчика 102 имеет задержку по отношению к сигналу датчика от датчика 101, допустим, на величину DELAY12. Гипербола H12 представляет все возможные положения, которые соответствуют задержке DELAY12. (Другими словами, гипербола H12 представляет все положения источника, из которых источник сгенерировал бы ту же самую задержку DELAY 12 между датчиками 101 и 102.) Аналогично, сигнал датчика от датчика 103 задерживается относительно сигнала датчика от датчика 101, допустим, на величину DELAY13. Гипербола H13, следовательно, представляет все возможные положения источника, которые соответствуют задержке DELAY13. Положения источника P0, таким образом, выводится из сигналов датчиков путем вычисления пересечения двух гипербол H12 и H13. (Считается, что специалист сможет вычислить пересечение двух гипербол с использованием учебника по численным методам).
Задержка между двумя сигналами (например, сигналами датчиков) может быть вычислена посредством взаимной корреляции между двумя сигналами. Время, в которое взаимная корреляция демонстрирует пиковое значение, показывает задержку. Альтернативно, обработка сигналов может быть применена для вычисления начала двух сигналов после периода тишины. Тогда временная разность между двумя началами показывает задержку.
Многопозиционность может также быть основана на третьей задержке, допустим, задержке DELAY23 между сигналами датчиков от датчиков 102 и 103. Задержка DELAY23 будет соответствовать третьей гиперболе H23 (не показана), представляющей возможные положения источника. Положение источника затем выводят посредством вычисления пересечения трех этих гипербол. В идеальном случае эти три гиперболы пересекаются точно в одном и том же положении P0. Однако, на практике эти три гиперболы пересекаются приблизительно в одном и том же положении вследствие шума в сигнале и других практических неточностей в процедуре. Итоговое положение источника может затем быть выведено посредством, во-первых, (a) вычисления (трех) пересечений соответствующих трех пар гипербол и последующего (b) вычисления среднего положения по трем пересечениям.
Хотя минимум три датчика требуется для выполнения многопозиционной процедуры, многопозиционная процедура также может быть выполнена с помощью более чем трех датчиков. Фиг. 3a иллюстрирует устройство контроля сна, использующее четыре датчика 301-304. Датчики сконфигурированы в виде геометрической фигуры, имеющей ромбовидную форму. Также возможна любая другая четырехугольная форма, например, ромбовидная форма. Фиг. 3b иллюстрирует устройство контроля сна, использующее пять датчиков 311-315. Пятый датчик 315 находится в центре прямоугольной геометрической фигуры, образованной первыми четырьмя датчиками 311-314. Другие конфигурации, имеющие более пяти датчиков в планарной геометрической фигуре и в любой возможной конфигурации, также могут использоваться. Формы и размеры, показанные на фиг. 3a и 3b, выбирают таким образом, чтобы датчики были распределены фактически однородно по матрасу. Таким образом, является вероятным, что по меньшей мере один из датчиков находится вблизи ребенка 150, в результате чего датчик измеряет сигналы вблизи ребенка и предоставляет сигнал датчика со сравнительно высоким отношением сигнал-шум (по сравнению с датчиком, расположенным дальше). Кроме того, расположение датчиков достаточно далеко друг от друга создает достаточно большие разности между сигналами датчиков, что является благоприятным для точности процедуры (такой как многопозиционная процедура), которая вычисляет положение источника по этим разностям. Если датчики расположены на более близком расстоянии друг от друга, то точность вычисленного положения источника имеет тенденцию к ухудшению.
Определение положения источника для более чем трех датчиков выполняется аналогично тому, как было описано в предыдущем абзаце. Из N датчиков может быть сформировано ½N(N-1) уникальных пар датчиков, при этом каждая пара соответствует гиперболе. Таким образом, 3 пары датчиков могут быть сформированы из 3 датчиков, 6 пар датчиков - из 4 датчиков, 10 пар датчиков из 5 датчиков, и так далее. Гипербола может быть определена для каждой пары датчиков, и пересечение может быть определено для каждой пары гипербол. Итоговое положение источника может быть выведено путем вычисления среднего определенных пересечений соответствующих пар гипербол.
Ребенок 150 может быть локализован на основании разности величин между сигналами датчиков, а не временных различий между сигналами датчиков. Сдвиг сигнала датчика зависит от статического давления, оказываемого ребенком 150. При отсутствии ребенка на матрасе 199, сигнал датчика имеет базовый сдвиг. При наличии ребенка 150 на матрасе, сигнал датчика имеет другой сдвиг. Разность между другим сдвигом и базовым сдвигом, таким образом, вызывается статическим давлением, оказываемым ребенком. Оказываемое статическое давление зависит от (a) веса ребенка и (b) положения P0 ребенка 150 относительно датчиков, но вклад веса ребенка в оказываемое статическое давление может быть взаимно уничтожен, в результате чего разность сдвигов в сигналах датчика может быть соотнесена с положением P0 ребенка.
Фиг.4 иллюстрирует сдвиги сигнала датчика в соответствующих различных ситуациях. Исключение вклада веса ребенка в разность сдвигов выполняется посредством калибровки сигнала датчика для датчика, например, датчика 101. Во-первых, базовый сдвиг Sbase сигнала датчика измеряют, когда ребенок не находится на матрасе. Во-вторых, контрольный сдвиг Sref измеряют, когда ребенок находится на матрасе, непосредственно над датчиком. Затем контрольную разность сдвигов Δref вычисляют как (абсолютную) разность Δref=|Sref-Sbase|, то есть, между контрольным сдвигом и базовым сдвигом. Когда ребенок не находится непосредственно над датчиком (например, ребенок находится в положении P0), измеряют фактический сдвиг Sact сигнала датчика. Фактическая разность сдвигов Δact затем вычисляют как Δact=|Sact-Sbase|, то есть, (абсолютную) разность между фактическим сдвигом и контрольным сдвигом. Фактическая разность сдвигов меньше, чем Δref, поскольку давление, оказываемое на датчик, становится меньше, когда ребенок перемещается в направлении от датчика. 'Остаточная' разность сдвигов, равная Δres=Δref-Δact, следовательно, возникает из разности d1 между положением P1 датчика 101 и положением P0 ребенка. Посредством вычисления остаточной разности сдвигов Δres вклад веса ребенка Δact в контрольную разность сдвигов Δref фактически взаимно уничтожается.
Остаточная разность сдвигов Δres может быть связана с расстоянием источник-датчик, например, расстоянием датчик-источник d1 между датчиком 101 и положением источника P0. Расстояние датчик-источник может быть определено с использованием функции затухания (то есть, аналогично кривой затухания 650), которая описывает, каким образом остаточная разность сдвигов Δres связана с расстоянием источник-датчик. Функция затухания может быть получена с помощью еще одной процедуры калибровки, в которой (1) объект такого же размера и веса, как ребенок, помещается на различных расстояниях от датчика, (2) сдвиг сигнала датчика измеряется для каждого из различных расстояний, и (3) остаточная разность сдвигов Δres вычисляется для каждого из измеренных сдвигов.
Посредством измерения соответствующих остаточных разностей сдвигов Δres для множества датчиков (например, для каждого из датчиков 101-103) расстояние датчик-источник (например, d1-d3) может быть определено для каждого из множества датчиков. Ребенок может быть локализован с применением процедуры трехстороннего измерения на основании множества расстояний датчик-источник d1-d3.
Альтернативно, изменения величины между сигналами датчиков выводятся не с использованием сдвига, как описано выше, а выводятся из амплитуды динамического компонента каждого сигнала датчика. В процедуре калибровки модель (манекен ребенка), вызывающая волны давления, аналогичные волнам ребенка, может быть помещена в различные положения на опорном слое.
Путем такой процедуры калибровки затухание величины биофизического сигнала (например, сигнал дыхания, сигнала сердечного ритма или момент тела) может быть определено как функция положения модели относительно положения датчика. Таким образом, и статический компонент (сдвиг) сигнала датчика, и динамический компонент (амплитуда) могут использоваться для определения положения ребенка на основании разностей величины между сигналами датчиков.
Фиг. 5a иллюстрирует процедуры трехстороннего измерения для определения положения ребенка 150 на матрасе 199. Такой процесс реализуется посредством функции локализации 120. Ситуация, изображенная на фиг. 5a, аналогична фиг. 2, но отличается в том смысле, что расстояние датчик-источник d1-d3 получают непосредственно только из (одного) соответствующего сигнала датчика (как описано выше). Положения источника, которые лежат на расстоянии d1 относительно датчика 101, показаны окружностью C1.
Аналогично, положения источника на расстоянии d2 относительно датчика 102, находятся на окружности C2, положения источника на расстоянии d2 относительно датчика 130 находятся на окружности C3. Ребенок 150 локализуется в положении P0 посредством определения пересечения между окружностями C1, C2 и C3 с использованием учебника по численным методам.
На фиг. 5a все три окружности C1-C3 требуются для определения положения P0 уникальным образом. Если используется только две окружности, уникальное местоположение не может быть определено. Например, окружности C1 и C2 пересекаются в двух положениях, P0 и P*. Таким образом, в этом примере требуется третья окружность C3 для определения положения P0 как уникального пересечения окружностей C1-C3.
Фиг. 5b иллюстрирует процедуры трехстороннего измерения с использованием только двух датчиков 101b и 102b. На фиг. 5b показан пример, в котором датчики 101b и 102b помещены на краю матраса 199 в соответствующих положениях P1 и P2. Следует отметить, что фиг. 5b аналогична фиг. 5a, но отличаются в том, что два датчика 101b и 102b помещены на краю, и что третий датчик 103 отсутствует. В данном примере только два датчика 101b и 102b являются необходимыми для определения уникального пересечения P0. Поскольку второе пересечение в положении P* лежит вне матраса, то положение P* может быть, следовательно, исключено из возможных положений ребенка. Следует отметить, что определение положения ребенка 150 с применением только двух датчиков выполняется на основании разностей величин между сигналами датчиков от датчиков 101b и 102b.
Фиг. 6a иллюстрирует три процесса для определения биофизической переменной BIOVAR по сигналу датчика SENSIG. Процесс, который проиллюстрирован блок-схемами 610-630, реализуется посредством функции определения 130. Каждый блок на фиг. 6a представляет подфункцию.
В соответствии с процессом 610, функция определения 130 работает следующим образом. Подфункция CORRFUN корректирует величину сигнала датчика SENSIG с использованием параметра затухания ATT и выдает скорректированный сигнал датчика SENSIG'. Подфункция GETBIOSIG отфильтровывает биофизический сигнал BIOSIG от скорректированного сигнала датчика SENSIG'. Подфункция GETBIOVAR извлекает биофизическую переменную BIOVAR из биофизического сигнала BIOSIG. Например, биофизический сигнал BIOSIG представляет собой сигнал дыхания, сигнал сердечных сокращений, или сигнал движения тела, и биофизическая переменная представляет собой интенсивность дыхания, интенсивность сердечных сокращений или интенсивность движений тела, соответственно.
Следует отметить, что терминология 'сигнал B отфильтровывается от сигнала A' подразумевает, что фильтр применяется к сигналу A, в результате чего получают сигнал B. Например, фильтр представляет собой полосовой фильтр.
Процесс 620 отличается от процесса 610 в том, что подфункции CORRFUN и GETBIOSIG меняются местами в порядке следования в процессе 620 по сравнению с процессом 610. Таким образом, корректируется величина биофизического сигнала, а не величина сигнала датчика. В соответствии с процессом 620, функция определения 130 затем работает следующим образом. Подфункция GETBIOSIG отфильтровывает биофизический сигнал BIOSIG от сигнала датчика SENSIG. Подфункция CORRFUN корректирует величину биофизического сигнала BIOSIG с использованием параметра затухания ATT и выдает скорректированный биофизический сигнал BIOSIG'. Подфункция GETBIOVAR извлекает биофизическую переменную BIOVAR из скорректированного биофизического сигнала BIOSIG'.
Процесс 630 представляет собой третий вариант для определения биофизической переменной BIOVAR' по сигналу датчика SENSIG. В этом варианте подфункция CORRFUN применяется к биофизической переменной BIOVAR, которая извлекается из биофизического сигнала BIOSIG. Подфункция CORRFUN корректирует величину биофизической переменной BIOVAR с использованием параметра затухания ATT и выдает скорректированную биофизическую переменную BIOVAR'.
В качестве примера подфункции GETBIOSIG, рассмотрим сигнал дыхания, отфильтровываемый от (скорректированного или нескорректированного) сигнала датчика с применением полосного фильтра, имеющего полосу пропускания, например, 0,1-2 цикла дыхания в секунду (Гц). Нижняя часть полосы пропускания служит для исключения компонента DC при 0 Гц. Высокая часть полосы пропускания служит для включения самых высоких частот сигнала дыхания. Частота дыхания ребенка, обычно составляющая около 0,5-1 цикл дыхания в секунду, попадает в эту полосу пропускания. Сигнал дыхания получают посредством применения полосного фильтра к скорректированному сигналу датчика.
В качестве еще одного примера подфункции GETBIOSIG, сигнал сердечных сокращений отфильтровывается от (скорректированного или нескорректированного) сигнала датчика аналогичным образом, но в диапазоне высоких частот, например, 1-250 Гц. Сигнал сердечных сокращений вызывается баллистическими движениями сердца, которые генерируют волны давления, и получаемый в результате сигнал сердечных сокращений обычно называют баллистической кардиограммой.
В качестве примера подфункции GETBIOVAR, биофизическая переменная, являющаяся частотой дыхания или интенсивностью дыхания, извлекается из (скорректированного или нескорректированного) сигналов дыхания. Например, частота дыхания извлекается посредством применения обработки сигналов для определения средней базовой частоты сигнала дыхания в течение предварительно заданного (например, 30-сек) периода. Аналогично, интенсивность дыхания извлекается посредством применения общей обработки сигналов для определения средней амплитуды сигнала дыхания в течение указанного предварительно заданного периода.
В качестве еще одного примера подфункции GETBIOVAR, биофизическая переменная, являющаяся частотой сердечных сокращений или интенсивностью сердечных сокращений, извлекается из (скорректированного или нескорректированного) сигнала сердечных сокращений. Например, частота сердечных сокращений извлекается посредством применения обработки сигналов для определения средней базовой частоты сигнала сердечных сокращений в течение предварительно заданного (например, 30-секундного) периода. Аналогично, интенсивность сердечных сокращений извлекается посредством применения общей обработки сигналов для определения средней амплитуды сигнала сердечных сокращений в течение такого предварительно заданного периода.
В качестве примера подфункции CORRFUN, параметр затухания ATT, являющийся числом между 0,0 и 1,0 выражающим степень, до которой величина (амплитуда) на которую сигнал датчика SENSIG (или биофизический сигнал BIOSIG) затухает в результате распространения на расстояние между источником сигнала и датчиком, который генерирует сигнал датчика SENSIG. Например, число 0,8 выражает, что величина сигнала датчика (или биофизического сигнала BIOSIG) в датчике составляет 80% величины сигнала датчика в положении источника P0. Другими словами, сигнал датчика теряет 20% своей величины в результате распространения от источника к датчику. При применении в процессе 610, подфункция CORRFUN затем получает скорректированный сигнал датчика SENSIG' посредством умножения сигнала датчика SENSIG на 1/0,8. При применении в процессе 620, подфункция CORRFUN получает скорректированный биофизический сигнал BIOSIG' посредством умножения биофизического сигнала BIOSIG на 1/0,8. При применении в процессе 630, подфункция CORRFUN получает скорректированную биофизическую переменную BIOVAR' посредством умножения биофизической переменной BIOVAR на 1/0,8. (Следует отметить, что коррекции в приведенном выше примере посредством подфункции CORRFUN выполняются в предположении, что все частоты волн давления распространяются через матрас аналогичным образом).
Фиг. 6b иллюстрирует вспомогательный процесс 640, который определяет параметр затухания ATT в трех процессах 610-630. Подфункция GETDIST вычисляет расстояние источник-датчик dn между положением источника (предоставленным/определенным посредством функции локализации 120) и (известным) положением датчика Pn. Например, датчик 101 генерирует сигнал датчика SENSIG, положение датчика Pn=P1 и расстояние dn=d1 (см. также фиг. 2). Подфункция GETATT затем определяет параметр затухания ATT посредством использования кривой затухания, которая связывает расстояние источник-датчик dn с фактором затухания величины ATT.
Например, график 650 показывает кривую затухания 651, имеющую расстояние источник-датчик dn на x-оси 652 и параметр затухания ATT (то есть, фактора затухания величины в данном примере) на y-оси 653. Кривая затухания 651 описывает, что величина сигнала датчика/биофизического сигнала постепенно становится меньше с увеличением расстояния источник-датчик dn. Подфункция GETATT, таким образом, связывает вычисленное расстояние источник-датчик dn с параметром затухания ATT через кривую затухания 651.
Кривая затухания 651 может быть задана как параметр затухания ATT, обратно пропорциональный расстоянию датчик-источник dn. Например, ATT=dn0/dn для dn>dn0 и ATT=1 для dn<=dn0, где dn0 представляет минимальное расстояние до источника (например, dn0=15 см). Альтернативно, кривая затухания 651 может быть обратно пропорциональна степени K обратного расстояния датчик-источник dn: ATT=(dn0/dn)K для dn>dn0 и ATT=1 для dn<=dn0, например, K=2.
В конечном счете, кривая затухания 651 определяется свойствами распространения в матрасе. В случае, когда затухание может быть описано в соответствии с последней формулой, процедура калибровки может быть применена для определения параметров K и dn0. Например, в процедуре калибровки применяется устройство, которое генерирует колебания (имеющие частоту в диапазоне представляющих интерес биофизических сигналов) и кривая затухания 651 квантуется (замеряется) на различных расстояниях датчик-источник dn. Метод наименьшего квадратичного отклонения затем выдает параметры K и dn0. Или, если один из двух параметром K и dn0 уже известен, метод наименьшего квадратичного отклонения выдает другой, неизвестный, параметр.
Свойства распространения могут различаться для различных частот волн давления, проходящих через матрас. Например, может быть необходимым определить кривую затухания 651 для каждой полосы частот. Например, первая полоса частот включает сигнал дыхания и вторая полоса частот включает сигнал сердечных сокращений: первая полоса частот, таким образом, соответствует первой кривой затухания 651, и вторая полоса частот, таким образом, соответствует второй (отличающейся) кривой затухания 651. В процессе 620 подфункция CORRFUN затем корректирует величину биофизического сигнала BIOSIG с использованием параметра затухания ATT, соответствующего полосе частот биофизического сигнала BIOSIG. Аналогично, процесс 630, подфункция CORRFUN затем корректирует величину биофизической переменной BIOVAR с использованием параметра затухания ATT, соответствующего полосе частот биофизического сигнала BIOSIG.
Различия в свойствах распространения могут включать в себя различные скорости распространения в пределах соответствующих различных полос частот. Каждый из сигнала дыхания и сигнала частоты сердечных сокращений может, таким образом, распространяться со своей собственной скоростью распространения. Многопозиционная процедура может затем быть выполнена на основании сигнала дыхания или сигнала сердечных сокращений, а не сигнала датчика. На фиг. 2 это может происходить следующим образом. Сигналы датчика от соответствующих трех датчиков 101-103 фильтруют таким образом, что соответствующие три сигнала дыхания получают из сигналов датчиков. Многопозиционная процедура затем выполняется на основании трех сигналов дыхания и скорости распространения сигналов дыхания в матрасе. Аналогичным образом, многопозиционная процедура выполняется на основании сигнала сердечных сокращений.
Функция определения 130 может выбирать сигнал датчика, имеющий наибольшую величину из имеющихся сигналов датчиков с целью определения биофизической переменной. Например, рассмотрим фиг. 2. Если сигнал датчика, сгенерированный датчиком 101, имеет большую величину (амплитуду), чем сигналы датчиков, то есть, сгенерированные датчиками 102 и 103, то функция определения 130 выбирает сигнал датчика от датчика 101. Биофизическую переменную определяют по выбранному сигналу датчика в соответствии с одним из процессов 610-630.
Аналогичным образом, функция определения 130 может выбирать биофизический сигнал (а не сигнал датчика), имеющий наибольшую величину из имеющихся биофизических сигналов из имеющихся биофизических сигналов. С этой целью, функция определения 130 отфильтровывает сигнал дыхания из каждого сигнала датчиков и выбирает сигнал дыхания, имеющий наибольшую величину. Биофизическая переменная может затем быть определена по выбранному сигналу дыхания, например, в соответствии с процессом 620.
Альтернативно, функция определения 130 может определять биофизическую переменную по множеству сигналов датчиков (то есть, сгенерированному соответствующим множеством датчиков), а не по единственному сигналу датчика. Рассмотрим следующий пример в соответствии с процессом 610. Множество сигналов датчиков от соответствующего множества датчиков (например, 101-103) сдвигают вдоль оси времени с целью выравнивания соответствующих фаз множества сигналов датчиков. Величину каждого из сдвинутых по времени сигналы датчиков затем корректируют с применением подфункции CORRFUN. 'Суперсигнал датчика' затем получают посредством вычисления среднего для (величины) скорректированных сдвинутых по времени сигналов датчиков, биофизический сигнал отфильтровывается от суперсигнала датчика, и биофизическая переменная извлекается из биофизического сигнала.
Аналогично предыдущему абзацу, рассмотрим следующий пример в соответствии с процессом 620. Множество биофизических сигналов отфильтровывают от каждого из соответствующего множества сигналов датчиков от соответствующего множества сигналов датчиков. Аналогично предыдущему абзацу, множество биофизических сигналов являются сдвинутыми по времени и скорректированными по величине, и 'биофизический суперсигнал' получают посредством вычисления среднего скорректированных по величине сдвинутых по времени биофизических сигналов. Биофизическую переменную затем извлекают из биофизических суперсигналов.
Альтернативно, биофизическую переменную извлекают из каждого сигнала датчика. Биофизические переменные затем корректируют в соответствии с процессом 630 и усредняют с получением 'биофизической суперпеременной'.
Необязательно, среднее, описанное в трех предыдущих абзацах, может представлять собой взвешенное среднее, при этом веса зависят от величины (возрастают с величиной) соответствующего сигнала датчика. Более низкая величина дает низкий вес, и большая величина дает высокий вес. Если предположить, что уровень шума в сигнале датчика является постоянным, то вес отражает отношение сигнал-шум, и вклад во взвешенное среднее, таким образом, возрастает с отношением сигнал-шум.
Движение тела представляет другую биофизическую переменную ребенка. Движения тела ребенка обычно создают волны давления, намного большие, чем волны давления, вызываемые баллистическими движениями сердца или вызываемые дыханием ребенка: в величине (необработанного) сигнала датчика доминирует движение тела. Движение тела, таким образом, количественно выражается простым способом посредством усреднения величины сигнала датчика в предварительно заданном интервале времени, например, 30-секундном интервале. Аналогично другим указанным выше биофизическим сигналам, волны давления, вызываемые движениями тела, также затухают в результате распространения через матрас.
Следует отметить, что для определения биофизической переменной, являющейся движением тела, не является необходимым вычисление 'промежуточного сигнала движения тела'. Вместо этого, движение тела, таким образом, непосредственно извлекают из сенсорного сигнала. Или, другими словами, сигнал движения тела равен сенсорному сигналу (что фактически делает подфункцию GETBIOSIG на фиг. 6a всечастотным фильтром), и движение тела затем извлекают из сигнала движения тела.
Состояние сна ребенка характеризуется посредством различных биофизических переменных, находящихся в определенных соответствующих диапазонах. Различные биофизические переменные обычно включают в себя частоту сердечных сокращений, частоту дыхания (или 'частоту дыхательных движений') и движение тела. Например, в одном состоянии сна ребенок обычно демонстрирует множество движений тела, высокую частоту сердечных сокращений и высокую частоту дыхания, тогда как в другом состоянии сна ребенок обычно демонстрирует низкую частоту дыхательных движений, умеренную частоту сердечных сокращений и мало движений тела. Таким образом, объединенные различные биофизические переменные являются показателем состояния сна ребенка. Пять различных состояний сна обычно различают для ребенка: спокойный сон, активный сон, спокойная бдительность, активная бдительность, и издавание звуков. Фиг. 7 иллюстрирует два состояния сна ребенка S1 и S5. Например, состояние сна S1 соответствует спокойному сну, тогда как состояние сна S5 соответствует издаванию звуков.
Для целей контроля состояния сна, биофизические переменные обычно измеряют в предварительно заданных интервалах, например, 20- или 30-секундных интервалах. Например, для определения интенсивности сердечных сокращений, среднюю величину (скорректированного по величине) сигнала сердечных сокращений определяют в пределах предварительно определенного интервала; или для определения интенсивности дыхания среднюю величину (скорректированного по величине) сигнала дыхания определяют в пределах предварительно определенного интервала; или для определения движения тела, среднюю величину (скорректированного по величине) сигнала датчика определяют в пределах предварительно определенного интервала.
Устройство 100 контроля сна может контролировать положение ребенка 150 посредством определения положения ребенка 150 через регулярные интервалы, например, раз в минуту или 30 секунд. Устройство 100 определения сна может определять, насколько сильно положение ребенка изменяется во время периода сна. Большое изменение положения ребенка может показывать беспокойство. Маленькое изменение положения ребенка может показывать, что ребенок находится в спокойном состоянии. Слишком маленькое изменение положения ребенка в течение долгого периода времени может показывать, что ребенок слишком тихий и может иметься проблема. Как процедура многопозиционного измерения (фиг. 2), так и процедура трехстороннего измерения (фиг. 5) могут применяться для определения положения ребенка.
Корректировка для затухания волн давления (например, в соответствии с процессами 610-630) является особенно актуальной для биофизических переменных, которые зависят от величины сигнала датчика или биофизического сигнала. Например, движение тела вычисляют как среднюю величину (за предварительно заданный интервал времени) сигнала датчика. Следовательно, если коррекция величины не выполняется для сигнала датчика, то движение тела будет недооцененным из-за затухания вследствие расстояния между датчиком и ребенком. Аналогично, корректировка величины таких биофизических переменных, как интенсивность дыхания и интенсивность сердечных сокращений, предотвращает недооценку этих биофизических переменных.
Хотя варианты осуществления описаны для ребенка, являющегося источником волн давления, варианты осуществления не обязательно ограничиваются детьми, и могут также применяться для взрослых или даже животных. Коротко говоря, любое живое существо, способное вызывать волны давления через матрас посредством, например, дыхания, сердечных сокращений или движения тела, может играть роль источника волн давления.
Хотя матрас используется как вариант осуществления опорного слоя в приведенных выше описаниях, другие типы опорных слоев также могут быть использованы. Например, опорный слой может представлять подкладку стула. Стул обычно является изогнутым, в отличие от матраса, который обычно является плоским. Стул может поддерживать взрослого человека. Датчики могут быть помещены непосредственно под подкладку стула, обеспечивая контакт с подкладкой. Альтернативно, датчики размещают внутри подкладки стула. Поскольку стул является изогнутым и подкладка стула следует кривизне стула, планарная геометрическая фигура, содержащая датчика, должна быть изогнутой аналогичным образом, с тем чтобы она также следовала кривизне (подкладки) стула. Следовательно, планарная геометрическая фигура может иметь форму ровной плоскости или изогнутой плоскости в зависимости от того, что подходит для опорного слоя.
Аналогично многопозиционной процедуре фиг. 2, трехпозиционная процедура фиг. 5 также может применяться для определения положения P0 ребенка 150 и для использования предварительно определенного положения для коррекции величины биофизической переменной или биофизического сигнала, например, для корректировки величины сигнала сердечных сокращений в соответствии с описанным в приведенных выше вариантах осуществления. Следует отметить, что кривая затухания 651 для сигнала сердечных сокращений может отличаться от функции затухания на остаточную разность сдвигов. Вследствие свойств распространения в опорном слое, частоты (матраса) для сигнала сердечных сокращений могут затухать по-другому как функции расстояния источник-датчик, чем сдвиг сигнала датчика (то есть, статическое давление, оказываемое ребенком).
Датчик может быть выполнен как пьезоэлемент, вклиненный между двумя пластинами материала PVC (или другого жесткого или полужесткого материала). Фиг. 3a иллюстрирует датчики в виде пьезоэлементов, вклиненных между двумя квадратными по форме пластинами. Фиг. 3b иллюстрирует датчики в виде пьезоэлементов, вклиненных между двумя имеющими круглую форму пластинами. С одной стороны, поверхность такой пластины не должна быть слишком большой по сравнению с матрасом, с тем чтобы измерения проводились точно в отношении положения на матрасе. С другой стороны, поверхность пластин не должна быть слишком маленькой, с тем чтобы она могла накапливать достаточное давление для фиксации волн давления со сравнительно небольшими величинами (например, такими как вызываются баллистическим движениями сердца).
Пьезоэлемент имеет предпочтительное направление в том смысле, что пьезоэлемент реагирует сильнее всего на давление в предпочтительном направлении и реагирует меньше на давление в направлении, ортогональном предпочтительному направлению. Пьезоэлемент вклинивается между двумя пластинами таким образом, чтобы предпочтительное направление было в основном ортогонально поверхностям соответствующих двух пластин, между которыми вклинен датчик. Другими словами, предпочтительное направление выровнено с вектором нормали к поверхности(-ям). Датчик, содержащий пьезоэлемент, вклиненный между двумя пластинами, таким образом, является наиболее чувствительным (и реагирует с наибольшей величиной) на давление в указанном предпочтительном направлении, ортогональном поверхностям двух пластин. Датчики, проиллюстрированные выше (например, на фиг. 1 или фиг. 4a, 4b) имеют предпочтительное направление, которое ортогонально планарной геометрической фигуре, в форме которой датчики расположены в пространстве. Датчики и планарная геометрическая фигура ориентированы в одном и том же направлении.
Датчик может содержать акселерометр, который генерирует сигнал датчика в качестве реакции на волны давления, вызываемые ребенком. Акселерометр может быть особенно предпочтительным для определения относительно слабых сигналов, вызываемых баллистическими движениями бьющегося сердца ребенка. Датчик может иметь один или более акселерометров в дополнение или вместо пьезоэлемента. Устройство контроля сна может иметь смесь различных типов датчиков, при этом типы датчиков представляют собой один из содержащих только пьезоэлемент датчиков, содержащих только акселерометр датчиков и датчиков, имеющих и акселерометр(-ы), и пьезоэлемент.
Фиг. 8 иллюстрирует общую перспективу матраса 199, включая ребенка 150 и устройство контроля сна 820, имеющее пять датчиков. Ребенок 150 и матрас 199 являются такими же, как на фиг. 2, тогда как устройство 820 является таким же, как на фиг. 3b. Матрас 199 имеет нижнюю сторону 811, боковую сторону 812 и верхнюю поверхность 813. Ребенок 150 лежит на верхней поверхности 813, закрывая один из пяти датчиков (следует отметить, что ребенок выглядит плоским на данной фигуре, но при этом предполагается, что он имеет неплоскую форму). Устройство 820, предпочтительно, находится внутри матраса или непосредственно под матрасом. Матрас 199, как показано на фиг. 5, имеет три главных оси: X вдоль нижней стороны 811, Y вдоль боковой стороны 812, и Z, ортогональную верхней поверхности 813.
В вариантах осуществления, описанных выше, предпочтительным направлением датчиков устройства 820 является Z-направление, например, в котором они являются наиболее чувствительными к давлению, вызываемому посредством «придавливания» матраса 199. Датчик, имеющий свое предпочтительное направление в Z-направлении, оптимально ориентирован для измерения давления, вызываемого дыханием, движениями тела и весом ребенка, все из которых создают давление вниз в Z-направлении.
Однако, для измерения волн давления, вызываемых баллистическим движениями бьющегося сердца, наилучшей ориентацией датчика является Y- или X-направление. Сердце ребенка 15 генерирует баллистические движения в основном вдоль продольной оси ребенка, которая соответствует Y-направлению на фиг. 8. Если ребенок 150 изменяет свою ориентацию таким образом, что его продольная ось выравнивается (то есть, становится параллельной) с X-направлением, то бьющееся сердце генерирует баллистические движения в X-направлении. В любом случае, сердце ребенка 150, который лежит на матрасе, вызывает волны давления в основном в плоскости X-Y и до существенно меньшей степени в Z-направлении. Датчик, имеющий в качестве своего предпочтительного направления Z-направление, будет, следовательно, измерять меньший сигнал (имеющий более плохое отношение сигнал-шум), чем датчик со своим предпочтительным направлением в X- или Y-плоскости.
Устройство 820 может быть настроено посредством ориентации центрального датчика 825 (из пяти датчиков) таким образом, чтобы его предпочтительным направлением являлось Y-направление. Центральный датчик 825, таким образом, лучше ориентирован для измерения волн давления, вызываемых баллистическими движениями сердца ребенка 150, в соответствии с его ориентацией, показанной на фиг. 8. Альтернативно, устройство может быть настроено посредством ориентации центрального датчика 825 таким образом, чтобы его предпочтительным направлением являлось X-направление. Тогда центральный датчик 825 лучше ориентирован для измерения волн давления, вызываемых баллистическими движениями, когда ребенок изменяет свое положение, допустим, на 90 градусов (или на другой существенный угол, например, 60 градусов).
Устройство 820 также может быть настроено посредством ориентации двух датчиком (а не одного датчика) в другом направлении, отличном от Z-направления. Например, первый датчик ориентирован в X-направлении и второй датчик ориентирован в Y-направлении, с тем чтобы по меньшей мере один из двух датчиков не был ортогонален основному направлению волн давления, вызываемых баллистическими движениями. Остальные три датчика могут затем применяться (функцией локализации 120) для определения положения ребенка 150 на матрасе. С использованием определенного положения ребенка 150, фактор затухания величины ATT может затем быть определен (посредством функции определения 130) для одного из остальных трех датчиков, с тем чтобы величина сигнала сердечных сокращений в положении ребенка 150 могла быть определена (в соответствии с приведенным выше вариантами осуществления). Сигнал сердечных сокращений от первого или второго датчика может затем быть настроен путем сопоставления его величины с определенной величиной сигнала сердечных сокращений в положении ребенка. Таким образом, сигнал сердечных сокращений имеет улучшенное отношение сигнал-шум, поскольку он измеряется через первый и/или второй датчик и имеет правильную величину вследствие коррекции величины.
Следует отметить, что датчик не обязательно должен быть ориентирован точно в одном из направлений X, Y или Z, но также может быть ориентирован в промежуточных направлениях. Например, два датчика в предыдущем абзаце могут быть ориентированы в некотором направлении между Z-направлением и направлением в плоскости X-Y. Такая ориентация улучшит чувствительность для измерения сигнала сердечных сокращений, при этом сохраняя большую чувствительность для измерения сигнала дыхания. Подводя итого, предпочтительное направление датчика может быть непараллельным Z-направлению и иметь значимый компонент направления в плоскости X-Y, но указанное предпочтительное направление не обязательно должно быть точно ортогональным Z-направлению. Например, угол между указанным предпочтительным направлением и Z-направлением составляет более чем от 5 до 10 градусов.
Настоящее изобретение также включает в себя способ измерения биофизической переменной живого существа, соответствующий устройству 100 контроля сна. Способ выполняет этапы в соответствии с функцией локализации и функцией определения устройства 100 контроля сна. Способ может быть реализован в виде инструкций компьютерного программного продукта, которые вызывают выполнение процессором этапов в соответствии со способом.
Следует отметить, что указанные выше варианты осуществления иллюстрируют, а не ограничивают изобретение, и специалисты в данной области техники будут в состоянии спроектировать множество альтернативных вариантов осуществления без отклонения от объема прилагаемой формулы изобретения.
В формуле изобретения любые условные обозначения, помещенные между скобками, не должны рассматриваться как ограничивающие пункт формулы изобретения. Использование глагола «содержит» и его спряжений не исключает наличия элементов или этапов, отличных от изложенных в пункте формулы изобретения. Если элемент приведен в единственном числе, это не исключает наличия множества таких элементов. Изобретение может быть реализовано посредством аппаратного обеспечения, содержащего несколько различных элементов, и посредством должным образом запрограммированного компьютера. В пункте формулы изобретения, относящемся к устройству, в котором перечисляется несколько средства, несколько этих средств может быть воплощено посредством одного и того же элемента аппаратного обеспечения. Сам факт того, определенные меры изложены во взаимно различных зависимых пунктах формулы изобретения, не показывает, что комбинациях этих мер не может применяться с выгодой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗИРОВАННОЙ ДИСТАНЦИОННОЙ ОЦЕНКИ ПАРАМЕТРОВ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ, ДЫХАНИЯ И ПУЛЬСА ЧЕЛОВЕКА ИЛИ ЖИВОТНОГО | 2010 |
|
RU2463949C2 |
| СИСТЕМА ДЛЯ СКРИНИНГА СОСТОЯНИЯ ОКСИГЕНАЦИИ СУБЪЕКТА | 2014 |
|
RU2677765C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СНА | 2014 |
|
RU2689177C1 |
| УСТРОЙСТВО БЕСКОНТАКТНОЙ РЕГИСТРАЦИИ БИОМЕТРИЧЕСКИХ ПОКАЗАТЕЛЕЙ ПАЦИЕНТА В СОСТОЯНИИ ЛЕЖА | 2017 |
|
RU2698441C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЧЕЛОВЕКА | 2010 |
|
RU2462990C2 |
| УСТРОЙСТВО И СПОСОБ ПРЕОБРАЗОВАНИЯ СИГНАЛА СНА | 2017 |
|
RU2732117C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЖИВОГО ОРГАНИЗМА | 2012 |
|
RU2533683C2 |
| СПОСОБ И АППАРАТ ДЛЯ ПОДДЕРЖАНИЯ И ТЕКУЩЕГО КОНТРОЛЯ КАЧЕСТВА СНА ВО ВРЕМЯ ТЕРАПИИ | 2003 |
|
RU2338457C2 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ОРГАНИЗМА | 2005 |
|
RU2295911C1 |
| УСТРОЙСТВО И СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ ОБ ОСНОВНЫХ ПОКАЗАТЕЛЯХ СОСТОЯНИЯ ОРГАНИЗМА ЖИВОГО СУЩЕСТВА | 2013 |
|
RU2675083C2 |
Группа изобретений относится к медицине. Способ контроля сна для измерения биофизической переменной живого существа осуществляют с помощью устройства. Устройство контроля сна содержит датчики давления, которые размещены в пространстве в виде предварительно заданной плоской геометрической фигуры и приспособлены для контактирования с опорным слоем для поддержки живого существа во время сна и генерации соответствующих сигналов датчиков в качестве реакции на давление, оказываемое живым существом через опорный слой на датчики. Блок обработки устройства контроля сна приспособлен для выполнения функции локализации и функции определения. Функция локализации сконфигурирована для определения положения живого существа на опорном слое относительно датчиков на основании разностей между соответствующими сигналами датчиков посредством выполнения процедуры измерения на основании разности фаз между соответствующими сигналами датчиков или посредством выполнения процедуры измерения на основании разности величин между соответствующими сигналами датчиков. Функция определения сконфигурирована для определения фактора затухания величины на основании определенного положения живого существа и положения одного из датчиков и определения биофизической переменной на основании сигнала датчика и коэффициента затухания величины. Достигается контроль сна с более точным измерением относящихся ко сну биофизических переменных пациента независимо от положения пациента на кровати. 3 н. и 10 з.п. ф-лы, 12 ил.
1. Устройство (100) контроля сна для измерения биофизической переменной (131) живого существа (150), при этом устройство (100) содержит датчики (101-103), представляющие собой по меньшей мере два датчика давления, которые размещены в пространстве в виде предварительно заданной плоской геометрической фигуры, при этом датчики приспособлены для
контактирования с опорным слоем (199) для поддержки живого существа во время сна и
генерации соответствующих сигналов датчиков в качестве реакции на давление, оказываемое живым существом через опорный слой на датчики,
при этом устройство контроля сна содержит блок (110) обработки, приспособленный для выполнения:
(a) функции локализации (120), сконфигурированной для
определения положения (Р0) живого существа на опорном слое относительно датчиков на основании разностей между соответствующими сигналами датчиков посредством выполнения процедуры измерения на основании разности фаз между соответствующими сигналами датчиков или посредством выполнения процедуры измерения на основании разности величин между соответствующими сигналами датчиков, и
(b) функции определения (130), сконфигурированной для
определения фактора затухания величины на основании определенного положения живого существа и положения (Р1-Р3) одного из датчиков, и
определения биофизической переменной (131) на основании сигнала датчика, сгенерированного посредством одного или более датчиков, и коэффициента затухания величины.
2. Устройство контроля сна по п.1, в котором
функция определения сконфигурирована для выбора из датчиков одного из датчиков (101-103), генерирующего сигнал датчика, имеющий максимальную величину среди величин соответствующих сигналов датчиков.
3. Устройство контроля сна по п. 1 или 2, в которомфункция определения сконфигурирована для определения биофизической переменной посредством
определения множества коэффициентов затухания величины на основании определенного положения живого существа и соответствующего множества положений (Р1-Р3) соответствующего множества датчиков (101-103) из датчиков, и
определения биофизической переменной на основании соответствующих сигналов датчиков, сгенерированных посредством соответствующих датчиков и на основании множества коэффициентов затухания величины.
4. Устройство контроля сна по п. 1 или 2, в котором
функция определения сконфигурирована для определения биофизической физической переменной, представляющей собой одно из частоты интенсивности дыхания, интенсивности сердечных сокращений, веса тела, движений тела, частоты сердечных сокращений и частоты дыхания.
5. Устройство контроля сна по п. 1 или 2, в котором
предпочтительное направление первого датчика из датчиков является непараллельным вектору нормали к поверхности (Z) предварительно заданной планарной геометрической фигуры,
при этом предпочтительное направление является направлением, в котором первый датчик сильнее всего реагирует на волну давления по сравнению с другими направлениями, отличными от предпочтительного направления.
6. Устройство контроля сна по п. 5, в котором
предпочтительное направление второго датчика из датчиков является непараллельным вектору нормали к поверхности (Z) и предпочтительному направлению первого датчика,
при этом предпочтительное направление второго датчика является направлением, в котором второй датчик сильнее всего реагирует на волну давления по сравнению с другими направлениями.
7. Устройство контроля сна по п. 1 или 2,
приспособленное для измерения биофизической переменной живого существа, являющегося взрослым человеком, человеческим ребенком или животным.
8. Устройство контроля сна по п. 1 или 2, содержащее (а) три датчика (101-103), расположенных в пространстве в виде предварительно заданной планарной геометрической фигуры, имеющей треугольную форму, или (b) четыре датчика (301-304), расположенных в пространстве в виде предварительно заданной планарной геометрической фигуры, имеющей четырехугольную форму.
9. Устройство контроля сна по п. 1 или 2, содержащее пять датчиков давления (311-315), при этом (а) пять датчиков расположены в пространстве в виде предварительно заданной планарной геометрической фигуры, имеющей пятиугольную форму, или (b) первые четыре (311-314) из пяти датчиков расположены в пространстве в форме четырехугольника и пятый датчик (315) из пяти датчиков находится внутри четырехугольной формы.
10. Устройство контроля сна по п. 1 или 2, в котором
по меньшей мере один из датчиков (101-103) представляет собой датчик давления, который приспособлен для генерации сигнала датчика в качестве реакции на давление, оказываемое живым существом, посредством использования по меньшей мере одного из (а) пьезоэлемента и (b) акселерометра.
11. Устройство контроля сна по п. 1 или 2, в котором предварительно заданная планарная геометрическая фигура имеет плоскую форму для встраивания в опорный слой, имеющий плоскую форму, таким образом, что плоская форма предварительно заданной планарной геометрической фигуры следует плоской форме опорного слоя.
12. Способ измерения биофизической переменной (131) живого существа (150), с применением датчиков (101-103), представляющих собой по меньшей мере два датчика давления, которые размещены в пространстве в виде предварительно заданной плоской геометрической фигуры, при этом датчики приспособлены для
контактирования с опорным слоем (199) для поддержки живого существа во время сна и
генерации соответствующих сигналов датчиков в качестве реакции на давление, оказываемое живым существом через опорный слой на датчики,
при этом способ включает в себя этапы:
определения положения (Р0) живого существа на опорном слое относительно датчиков на основании разностей между соответствующими сигналами датчиков посредством выполнения процедуры измерения на основании разности фаз между соответствующими сигналами датчиков или посредством выполнения процедуры измерения на основании разности величин между соответствующими сигналами датчиков,
определения фактора затухания величины на основании определенного положения живого существа и положения (Р1-РЗ) одного из датчиков, и
определения биофизической переменной (131) на основании сигнала датчика, сгенерированного одним из датчиков, и фактора затухания величины.
13. Компьютер, содержащий процессор и компьютерную программу со средствами программного кода, сконфигурированный для выполнения процессором этапов способа по п.12 при выполнении указанной компьютерной программы на компьютере.
| US 2007149883 A1, 28.06.2007 | |||
| US 6280392 B1, 28.08.2001 | |||
| CN 103040474 A, 17.04.2013 | |||
| JP 2009082511 A, 23.04.2009 | |||
| CN 102232825 A, 09.11.2011 | |||
| CN 102415879 A, 18.04.2012 | |||
| CN 202654115 U, 09.01.2013 | |||
| WO 2011008175 A1, 20.01.2011 | |||
| RU 2009134887 A, 20.03.2011 | |||
| RU 2004124247 A, 10.03.2005. |

