Область техники
Изобретение относится к области автоматизированной оценки параметров двигательной активности, дыхания и сердцебиения человека или животного с помощью электромагнитных радиосигналов.
Уровень техники
Оценка параметров двигательной активности, дыхания и пульса человека может быть актуальна во многих случаях, например при оценке качества сна, диагностике различных типов нарушений дыхания во сне (обструктивное, центральное апноэ и др.). Кроме того, она позволит точно определить количество и характер движений пациента за определенный промежуток времени, сделать вывод о необходимости проведения противопролежневых мероприятий и предотвратить, таким образом, образование пролежней без применения специальных противопролежневых матрасов и подушек. Также оценка двигательной активности необходима при диагностике двигательных расстройств, например болезни Паркинсона или последствий перенесенного инсульта. Предлагаемый способ может быть использован для автоматизированной оценки состояния животных при проведении экспериментов в области фармакологии и зоопсихологии.
Способы для автоматизированной оценки параметров двигательной активности, дыхания и пульса человека существуют. Все они могут быть разделены на контактные и бесконтактные. Некоторые из них позволяют регистрировать эти параметры одновременно. Основным преимуществом бесконтактных методов является тот факт, что в отличие от контактных методов их применение не мешает пациенту, не влияет на качество сна испытуемых и не сказывается на результатах экспериментов.
Предложен контактный метод, в котором для регистрации перемещений человека используют шарик, помещенный в пустотелый корпус, в вершинах которого установлены замыкаемые шариком электрические контакты, корпус имеет возможность установки на верхней части тела пациента (патент РФ 2096995 С1, «Мобильное устройство для регистрации и накопления физиологических параметров распознавания и диагностирования сонно-апноэтического синдрома», опубл. 27.11.1997). Тот факт, что этот способ является по сути контактным, является его основным недостатком. Кроме того, применение такого рода датчика будет оказывать влияние на качество сна испытуемого (пациент не сможет спать на той части тела, к которой прикреплен датчик), для регистрации параметров дыхания и сердцебиения необходимо использование дополнительных датчиков.
Также движения конечностей человека могут быть зарегистрированы контактно при помощи акселерометров, фиксируемых на бедре (например, Tritrac-R3D, Hemokentics, Inc.,) или на запястье (ActiWatch AW64, MiniMitter Co.). Однако приборы данного типа позволяют оценивать движение только той части тела, на которой закреплены.
Для бесконтактной оценки двигательной активности предложен способ, в котором датчик выполнен в виде эластичной пневмоемкости (матраса или кресла), давление в которой изменяется при движении человека (А.с. СССР 348203, «Пневматический актограф», опубл. 23.08.1972). Основным недостатком такого типа датчиков является сложность конструкции и низкая точность метода.
Движение тела человека, его дыхание и сердцебиение также может быть оценено при помощи пьезоэлектрических датчиков, вмонтированных в основание кровати или расположенных под матрасом, в случае, если к ним прикладывается давление, вырабатывается электрический заряд, который может быть зарегистрирован, на этом принципе основан один из методов регистрации движений (патент США 5,724,990, «Устройство для мониторинга человека», опубл. 10.03.1998). Недостатки данного устройства аналогичны предыдущему.
Одним из методов бесконтактного мониторинга двигательной активности, дыхания и сердцебиения является оптическая интерферометрия (патент США 6,352,517, «Устройство для оптического мониторинга анатомических движений и способ его применения», опубл. 05.03.2002). К ограничениям данного способа следует отнести тот факт, что сигналы оптического диапазона частот блокируются одеждой и постельными принадлежностями, что делает его неприменимым в случае анализа качества сна или мониторинга малоподвижных больных.
Возможна регистрация движений, дыхания и сердцебиения при помощи ультразвука (выложенная патентная заявка США 2010/0027378, «Способ обнаружения людей», опубл. 04.02.2010), однако соотношение сигнал-шум для данного типа устройств низкое.
Также предложено использовать электромагнитное излучение радиочастотного диапазона для аналогичных целей (выложенная патентная заявка США 2009/0203972, «Способ, система и устройство для мониторинга физиологических сигналов», опубл. 13.08.2009), при этом возможна одновременная регистрация частот дыхания и пульса. Разделение сигналов двигательной активности, сердцебиения и дыхания предполагается осуществлять при помощи специально подобранных фильтров. В качестве ближайшего аналога (прототипа) выбран этот способ, так как в нем для мониторинга движений человека предлагается использовать электромагнитное излучение, но недостатком способа является тот факт, что отсутствует возможность распознавания различных типов движений, таких как движения конечностей, головы, туловища, что является особенно актуальным при оценке качества сна пациента и наблюдении за малоподвижными больными и больными, перенесшими операций. Другим недостатком способа является необходимость точного позиционирования прибора по дальности относительно человека, в противном случае возможны искажения полезного сигнала, падение его мощности, так как испытуемый будет выходить за пределы зоны действия прибора.
Раскрытие изобретения
Технической задачей предлагаемого изобретения является улучшение автоматизированной оценки параметров дыхания, сердцебиения, типа и интенсивности двигательной активности человека или животного с помощью электромагнитных сигналов радиочастотного диапазона и упрощение процедуры проведения исследования, а именно: отсутствие необходимости точного позиционирования по дальности относительно человека или животного и улучшение качества бесконтактного анализа движений пациента, паттерна его дыхания и сердцебиения.
Данная задача решается тем, что способ автоматизированной дистанционной оценки параметров двигательной активности, дыхания и пульса человека или животного включает прием сигнала, отраженного от указанного живого объекта; обработку и анализ отраженного сигнала путем определения разности фаз, обусловленной сигналом, отраженным от объекта; получение одного или нескольких физиологических параметров объекта. Вышеупомянутые физиологические параметры включают один или несколько параметров, характеризующих дыхание, сердечную активность и телодвижения объекта; преобразование выбранной полученной информации к виду, доступному пользователю. Способ отличается тем, что дополнительно включают распознавание типов телодвижений объекта, для этого используют зондирующий сигнал со ступенчатой частотной модуляцией, а в качестве приемника отраженных от объекта сигналов используют когерентный квадратурный приемник.
Зондирующий сигнал преимущественно формируют в виде пачек из N=4…64 парциальных частотных компонент гигагерцового частотного диапазона, причем величину k-й частотной составляющей в пачке определяют формулой fk=f1+k·Δf, где f1 - первая из N частот, Δf - шаг по частоте, k=1…N - порядковый номер частотной составляющей.
В способ включены последовательные стадии: 1) выбора зондирующей частоты, оптимальной для положения объекта относительно приемо-передающего блока устройства, 2) анализа и сопоставления записей, полученных для каждой из зондирующих частот; 3) разбиения записи сигнала на интервалы между периодами, соответствующими телодвижениям живого объекта; 4) определения параметров дыхания и сердечной деятельности.
Это приводит к повышению информативности бесконтактного анализа физиологических параметров живого объекта за счет распознавания различных типов движения, при этом в отличие от прототипа нет необходимости точного позиционирования приемника по дальности относительно человека.
Каждая из квадратур N частотных составляющих в регистрируемом сигнале содержит информацию о перемещении отражающей поверхности живого объекта, однако в силу того, что каждая из зондирующих частот отличается от последующей на Δf, информация, регистрируемая для каждой из них, отличается по амплитуде и спектральному составу, что позволяет обеспечить уверенную регистрацию полезного сигнала для любой дальности между антенным блоком и пациентом в пределах 20 м. Процедура подготовки к проведению исследования упрощается, так как нет необходимости располагать устройство на определенной дальности до человека для того, чтобы получить сигнал удовлетворительного качества.
Перечень чертежей
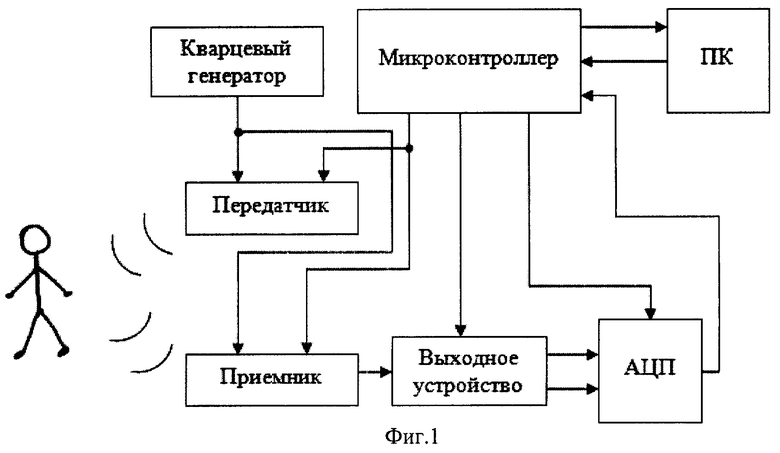
Фиг.1 - схема устройства для осуществления предлагаемого способа.
Фиг.2 - схема алгоритма распознавания различных типов движений при помощи устройства, реализующего способ.
Фиг.3, 4, 5 - графики фиксируемых сигналов.
Осуществление изобретения
Для осуществления способа используют устройство (схема фиг.1) со следующими функциональными компонентами. «Кварцевый генератор» синхронизирует работу передатчика и приемника. «Передатчик» формирует сигнал со ступенчатой частотной модуляцией в соответствии с заданными параметрами. «Приемник» построен по супергетеродинной схеме с двойным преобразованием частоты (этим обеспечивается высокая чувствительность, избирательность и помехозащищенность), обеспечивает прием сигнала, отраженного от биологического объекта, его преобразование и получение на выходе двух квадратурных компонент. Он предназначен для приема электромагнитного сигнала. «Выходное устройство» содержит усилители и аналоговый многоканальный полосно-пропускающий фильтр (АМППФ), предназначенный для фильтрации постоянной составляющей и высокочастотных помех на каждой из частот передатчика для каждой из квадратурных компонент. АЦП обеспечивает оцифровку каждой из двух квадратурных составляющих. «Микроконтроллер» предназначен для управления синтезатором частот в передатчике, синтезатором частот в приемнике, АМППФ, а также обеспечивает запись оцифрованных значений в файл, который передается в персональный компьютер (ПК) для дальнейшей обработки: выделения из зарегистрированного сигнала данных о параметрах дыхания, сердцебиения, типах и интенсивности телодвижений.
Способ автоматизированной дистанционной оценки параметров двигательной активности, дыхания и пульса человека или животного заключается в следующем. Сигнал, излучаемый передатчиком, отражается от границы раздела сред с различными диэлектрическими свойствами. При этом сигнал, отраженный от человека или животного, приобретает специфическую модуляцию, обусловленную движением тела в целом, его дыханием и сердцебиением. Отраженный сигнал улавливается приемником и поступает в выходное устройство, после чего сигнал оцифровывается при помощи АЦП и передается на ПК. В ПК при помощи алгоритмов фильтрации принимаемый сигнал разделяется на реализации дыхания, сердцебиения и двигательной активности. Далее по зарегистрированным записям квадратур для 16-и частот проводится поиск начальных моментов отдельных последовательностей движений, сравнение отрезков записи, соответствующей движению для каждой из зондирующих частот, после чего делается вывод о принадлежности выбранной последовательности движений к определенному типу.
Для распознавания различных типов двигательной активности предложен алгоритм распознавания различных типов движений, состоящий из следующих стадий:
- выбор квадратуры записанного сигнала, имеющей максимальную спектральную плотность мощности;
- определение для выбранной квадратуры величины порогового уровня, характерного для двигательной активности;
- локализация в выбранной квадратуре с помощью выбранного порогового уровня интервалов времени, когда наблюдаются артефакты движения (tA, А=1,2…М, где М - количество артефактов движения) и когда они отсутствуют (tC, С=1,2…М+1);
- определение для каждого из интервалов tC квадратуры записанного сигнала (QNumС), имеющей максимальную спектральную плотность мощности на заданном временном интервале;
- сопоставление спектральной плотности мощности для выбранных квадратур на соседних участках tС и tС+1 и спектральной плотности мощности для артефактов движения на интервале времени tА, для А=С, с целью определения типа артефакта движения, имеющего место в период времени tА.
Пример реализации способа
Испытуемый (человек) располагался на кровати в положении лежа на спине, на расстоянии 3 м от него устанавливались и направлялись на кровать приемная и передающая антенны устройства. В качестве зондирующего сигнала был использован сигнал, сформированный в виде пачек из 16 частотных компонент в диапазоне от 3,6 до 4,0 ГГц. Запись отраженного от испытуемого сигнала велась в течение 30 минут.
В течение этого времени испытуемый по команде оператора выполнял следующие действия:
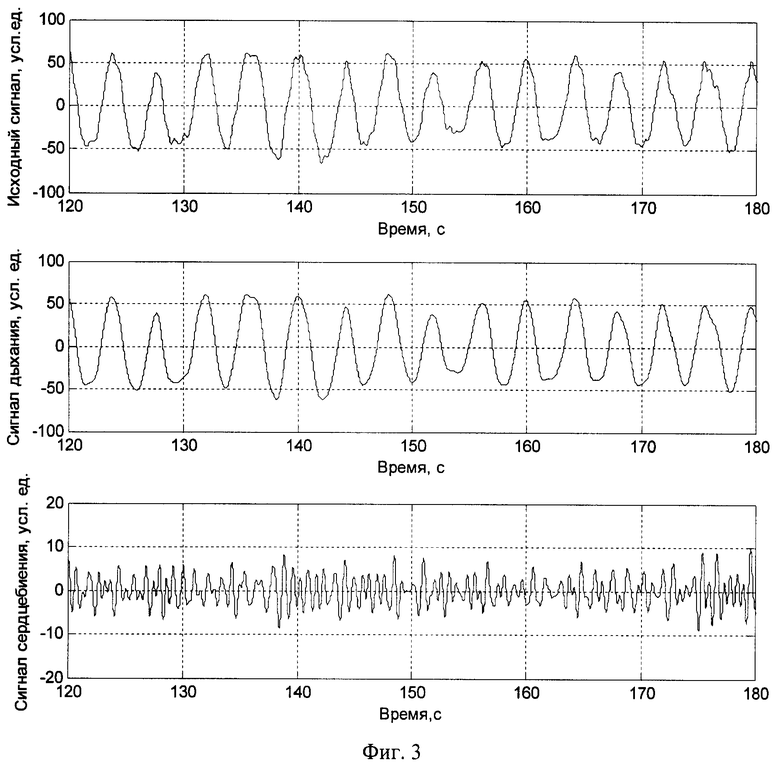
1) лежал не двигаясь, при этом с помощью предложенного способа осуществлялось выделение сигналов дыхания и сердцебиения из исходного сигнала, принимаемого устройством (Фиг.3);
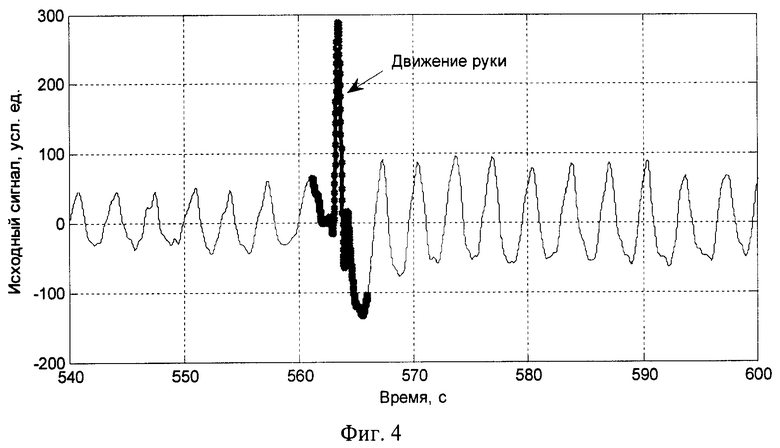
2) двигал правой рукой, сгибая ее в локтевом суставе (Фиг.4), соответствующий данному типу телодвижений участок записи обнаружен предложенным способом и классифицирован как «движение руки»;
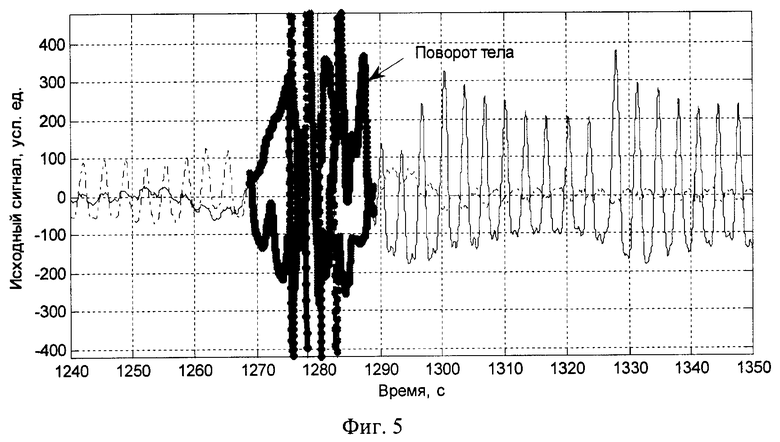
3) изменял положение тела относительно устройства, переворачиваясь со спины на правый бок (Фиг.5), соответствующий данному типу телодвижений участок записи обнаружен предложенным способом и классифицирован как «поворот тела».
На Фиг.3, 4, 5 приведены сигналы, соответствующие квадратуре, имеющей максимальную спектральную плотность мощности на временном интервале, приведенном на каждом из графиков. При изменении положения тела относительно устройства происходит изменение номера частоты и квадратуры, имеющей максимальную спектральную плотность мощности на выбранном временном интервале, поэтому на Фиг.5 приведены графики двух квадратур, одна из которых (показана штрихпунктирной линией) имела максимальную спектральную плотность мощности на временном интервале, предшествующем повороту тела, а вторая (показана сплошной линией) - на последующем за поворотом тела временном интервале.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ | 2008 |
|
RU2392853C1 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЧЕЛОВЕКА | 2010 |
|
RU2462990C2 |
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ПРОЦЕССОВ ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ (ВАРИАНТЫ) | 1992 |
|
RU2108061C1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ ФИЗИОЛОГИЧЕСКИХ ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ОРГАНИЗМА | 2005 |
|
RU2295911C1 |
| ИМПУЛЬСНЫЙ СВЕРХШИРОКОПОЛОСНЫЙ ДАТЧИК ДИСТАНЦИОННОГО МОНИТОРИНГА ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ | 2008 |
|
RU2392852C2 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО БЕСКОНТАКТНОГО МОНИТОРИНГА ПАРАМЕТРОВ ЖИЗНЕДЕЯТЕЛЬНОСТИ ЖИВОГО ОРГАНИЗМА | 2012 |
|
RU2533683C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЖИВЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2141119C1 |
| Способ обнаружения, идентификации и мониторинга вибрирующих объектов | 2019 |
|
RU2713433C1 |
| ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР | 2003 |
|
RU2234112C1 |
| Способ определения параметров движения высокоскоростного воздушного объекта | 2023 |
|
RU2807316C1 |

Изобретение относится к области автоматизированной оценки параметров двигательной активности, дыхания и сердцебиения человека или животного с помощью электромагнитных радиосигналов. Технический результат - отсутствие необходимости точного позиционирования по дальности относительно человека или животного и улучшение качества бесконтактного анализа движений пациента, паттерна его дыхания и сердцебиения. Способ включает прием сигнала, отраженного от указанного живого объекта; обработку и анализ отраженного сигнала путем определения разности фаз, обусловленной сигналом, отраженным от объекта; получение одного или нескольких физиологических параметров объекта. Для распознавания типов телодвижений объекта используют зондирующий сигнал со ступенчатой частотной модуляцией, а в качестве приемника отраженных от объекта сигналов используют когерентный квадратурный приемник. 2 з.п. ф-лы, 5 ил.
1. Способ автоматизированной дистанционной оценки параметров двигательной активности, дыхания и пульса человека или животного, включающий прием сигнала, отраженного от указанного живого объекта; обработку и анализ отраженного сигнала путем определения разности фаз, обусловленной сигналом, отраженным от объекта; получение одного или нескольких физиологических параметров объекта, вышеупомянутые физиологические параметры включают один или несколько параметров, характеризующих дыхание, сердечную активность и телодвижения объекта; преобразование выбранной полученной информации к виду, доступному пользователю, отличающийся тем, что дополнительно включают распознавание типов телодвижений объекта, для этого используют зондирующий сигнал со ступенчатой частотной модуляцией, а в качестве приемника отраженных от объекта сигналов используют когерентный квадратурный приемник.
2. Способ по п.1, отличающийся тем, что зондирующий сигнал формируют в виде пачек из N=4..64 парциальных частотных компонент гигагерцового частотного диапазона, причем величину k-й частотной составляющей в пачке определяют формулой fk=f1+k·Δf, где f1 - первая из N частот; Δf - шаг по частоте; k=l..N - порядковый номер частотной составляющей.
3. Способ по п.1, отличающийся тем, что в него включены последовательно стадии: выбора зондирующей частоты, оптимальной для положения объекта относительно приемопередающего блока устройства; анализа и сопоставления записей, полученных для каждой из зондирующих частот; разбиения записи сигнала на интервалы между периодами, соответствующими телодвижениям живого объекта; определения параметров дыхания и сердечной деятельности.
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДЫХАНИЯ И СЕРДЦЕБИЕНИЯ | 2008 |
|
RU2392853C1 |
| US 4085740 A, 25.04.1978 | |||
| МИКРОВОЛНОВЫЙ ДЕТЕКТОР ЖИЗНИ | 1994 |
|
RU2097085C1 |
| US 20040249258 A1, 09.12.2004. | |||

