ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу для управления ориентацией мобильной видеокамеры, подходящей для съемки пары спортсменов, двигающихся по игровому полю, и к соответствующей системе для съемки двигающихся спортсменов. В частности, настоящее изобретение обеспечивает преимущественное, но не единственное применение в одномерном игровом поле, например, платформе для фехтования, к которой нижеследующее описание будет делать прямую ссылку, без потери, таким образом, общности.
УРОВЕНЬ ТЕХНИКИ
В соревнованиях по фехтованию решение, какому фехтовальщику должно быть назначено очко в конце действия, принимается судьей, который обычно стоит в стороне и на половине длины от платформы для фехтования. За судьей обычно располагается видеокамера для съемки пары фехтовальщиков, двигающихся по игровому полю. Объектив видеокамеры расположен на высоте большей, чем таковая судьи, для предотвращения загораживания последним вида фехтовальщиков. Видеоизображение, записанное видеокамерой, может помочь судье в принятии решения о назначении очка в конце очень быстрого обмена ударами между фехтовальщиками. Для этого, кадрирование видеокамеры должно оставаться постоянно сфокусированным и суженным на пару фехтовальщиков, когда они перемещаются вдоль платформы состязания. По этой причине видеокамера устанавливается на подвижной опоре, которая позволяет регулировать ориентацию видеокамеры по отношению к платформе состязания, в то время как человек двигает опору для удержания кадрирования, сцентрированного на пару фехтовальщиков, когда они перемещаются вдоль платформы состязания. Поэтому, если обмен ударами оказывается слишком быстрым даже для судьи, то последний может решить, кто получает очко, только после того, как посмотрит записанные видеоизображения в замедленном движении.
Как можно понять, способ съемки, описанный выше, сильно подвержен невнимательности человека, двигающего видеокамеру. Иными словами, нередко человек, управляющий видеокамерой, неспособен поддерживать точное кадрирование, таким образом упуская одного из фехтовальщиков, когда во время обмена ударами они быстро достигают одного конца платформы. В этих случаях записанные видеоизображения не могут как-либо помочь судье.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Цель настоящего изобретения - обеспечить способ для регулировки ориентации видеокамеры в автоматическом режиме для поддержания кадрирования, сцентрированного на паре фехтовальщиков, двигающихся на платформе состязания, и соответствующую систему для съемки пары двигающихся фехтовальщиков, где способ и система свободны от вышеописанных недостатков и, в то же время, просты и недороги в изготовлении.
В соответствии с настоящим изобретением обеспечен способ для регулировки ориентации первой мобильной видеокамеры, подходящей для съемки пары спортсменов, двигающихся по игровому полю, а также система для съемки пары спортсменов, двигающихся по игровому полю, как определено в прилагаемой формуле изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Настоящее изобретение теперь будет описано со ссылкой на прилагаемые чертежи, которые иллюстрируют неограничивающие варианты осуществления, применимые исключительно в качестве примера, в основном к одномерному игровому полю для фехтования, на которых:
- На Фиг.1 схематически изображена система для съемки пары спортсменов, двигающихся по игровому полю, согласно первому варианту осуществления изобретения; а также
- На Фиг.1-4 изображена система для съемки пары спортсменов, двигающихся по игровому полю, согласно трем соответствующим дополнительным вариантам осуществления изобретения.
ЛУЧШИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
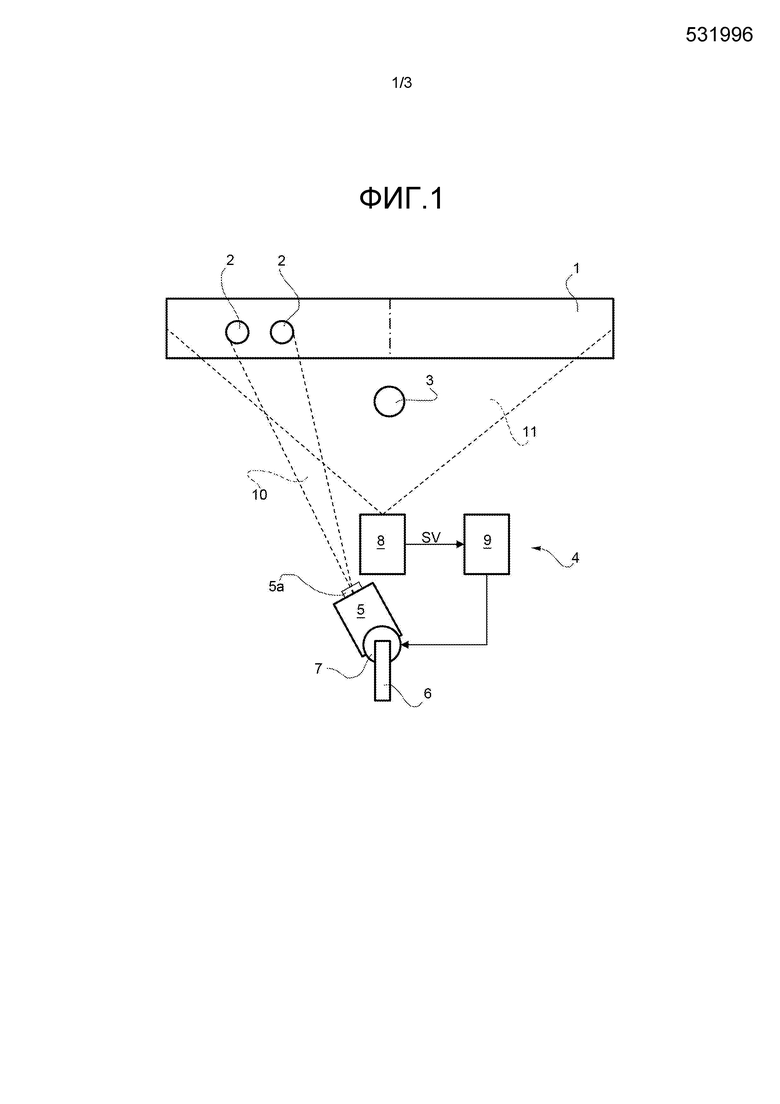
На Фиг.1, 1 обозначает платформу для фехтования, 2 обозначает двух фехтовальщиков, которые состязаются на платформе 1, 3 обозначает судью, который стоит в стороне и на середине длины платформы 1 для просмотра той же платформы 1, и 4 обозначает систему для съемки фехтовальщиков 2, двигающихся на платформе 1. Система 4 содержит видеокамеру 5 для съемки пары спортсменов, двигающихся на платформе 1, и опору 6 для поддержки видеокамеры 5 с ее собственным объективом 5а, обращенным к платформе 1, и на высоте большей, чем высота судьи 3. Как показано на Фиг.1, видеокамера 5 обычно расположена сзади судьи 3 по отношению к положению платформы 1.
Со ссылкой на Фиг.1, в соответствии с настоящим изобретением, система 4 содержит устройство 7 с моторным приводом, которое установлено на опоре 6 и на котором установлена видеокамера 5 для перемещения последней, путем изменения ее ориентации по отношению к платформе 1, дополнительную видеокамеру 8, которая расположена неподвижно относительно платформы 1 для кадрирования всей платформы 1, чтобы получить видеоизображения, указывающие положение фехтовальщиков 2, двигающихся на платформе 1, и блок 9 обработки и управления, который взаимосвязан с видеокамерой 8 для приема от последней видеоизображений в виде SV видеосигнала, и выполнен с возможностью определения, в режиме реального времени, в зависимости от SV видеосигнала, промежуточного положения между двумя фехтовальщиками 2 относительно системы координат, объединенной с платформой 1 и управления устройством 7 с моторным приводом, для центрирования кадрирования видеокамеры 5 на промежуточном положении. Как можно видеть из Фиг.1, кадрирование (формирование кадра) 11 видеокамеры 8 должно быть намного шире, чем кадрирование 10 видеокамеры 5.
Снабженное мотором устройство 7 образовано электромотором, снабженным соответствующим кодером, дающим возможность управления угловым положением электромотора с высокой точностью. Видеокамера 5 установлена соединенной с валом электромотора движущегося устройства 7 для поворота вместе с валом электромотора. Снабженное мотором устройство 7 само по себе известно и не описывается с дополнительными подробностями.
Блок 9 обработки и управления выполнен с возможностью обработки видеоизображений, обеспечиваемых видеокамерой 8 для идентификации двигающихся силуэтов фехтовальщиков, обработки каждого силуэта, для того, чтобы определить положение соответствующего фехтовальщика 2 относительно упомянутой системы координат и определить промежуточное положение между двумя фехтовальщиками в зависимости от текущих положений двух фехтовальщиков. В деталях, каждый силуэт обрабатывается для определения, в качестве положения соответствующего фехтовальщика, положения определенной точки тела фехтовальщика, например, талии тела фехтовальщика, в зоне кадрирования 11.
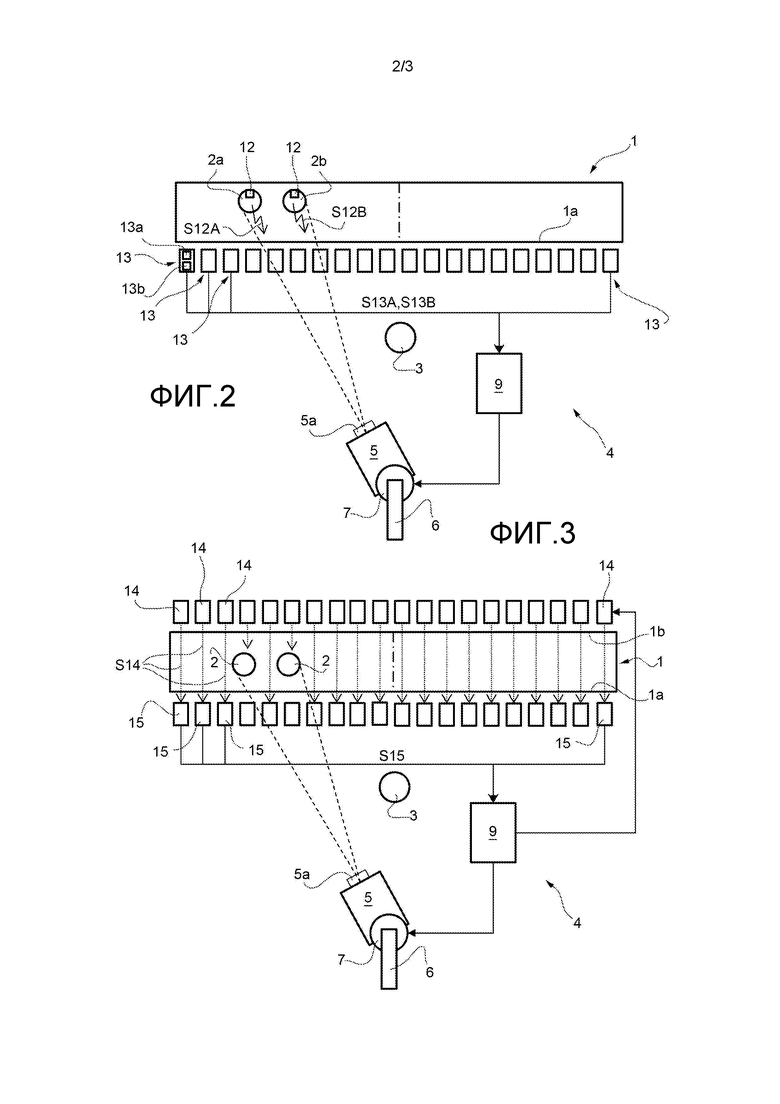
В соответствии с дополнительным вариантом осуществления настоящего изобретения, показанном на Фиг.2, в котором фехтовальщики обозначены как 2a и 2b и соответствующие элементы обозначены теми же номерами и сокращениями, как на Фиг.1, система 4 содержит, вместо видеокамеры 8 на Фиг.1, два радиопередатчика 12, каждый из которых связан с соответствующим фехтовальщиком 2а, 2b, и которые прикрепляются в аналогичных точках тел двух фехтовальщиков 2а и 2b, и множество радиоприемников 13, которые расположены в фиксированных и известных положениях вдоль платформы 1 и определены относительно системы координат, объединенной с платформой 1 и взаимосвязаны с блоком 9 обработки и управления для передачи последнему, в аналоговой форме, принятых сигналов. Каждый передатчик 12, например, закреплен на шлеме соответствующего фехтовальщика 2a, 2b и является передатчиком типа, работающего от аккумулятора. Радиоприемники 13 расположены последовательно и равномерно распределены по отдельности вдоль первой более длинной стороны 1а платформы 1. Так как радиоприемники 13 распределены вдоль более длинной стороны 1а, система координат, объединенная с платформой 1, является одномерной системой координат, которая имеет начало координат в точке более длинной стороны 1а, например, в конечной точке или средней точке более длинной стороны 1а.
Радиопередатчики 12, однажды включенные в начале состязания, передают два соответствующих радиосигнала, обозначенных как S12A и S12B на Фиг.2, имеющих две различные частоты, которые выбираются в диапазоне частот между 400 МГц и 2,5 ГГц. В частности, эти две частоты двух радиосигналов S12A и S12B содержатся в, по меньшей мере, одной полосе частот для нелицензированной радиосвязи, например, одного из промышленных, научных и медицинских диапазонов частот (ISM), LPD433 полосы и/или PMR446 полосы. Каждый радиоприемник 13 содержит пару полосовых фильтров 13a и 13b, настроенных отдельно на двух частотах для одновременного приема двух радиосигналов S12A и S12B, в соответствии с известными методиками частотного разделения, и выдачи двух электрических сигналов S13A и S13B, соответствующих принимаемым радиосигналам.
Вариант осуществления на Фиг.2 отличается от Фиг.1 также тем, что блок 9 обработки и управления выполнен с возможностью определения положения двигающихся фехтовальщиков 2a и 2b в зависимости от известных положений радиоприемников 13 и радиосигналов, принятых радиоприемниками 13.
В частности, блок 9 обработки и управления выполнен с возможностью приема сигналов S13A и S13B от каждого радиоприемника 13, для измерения, для каждой из различных частот радиосигналов S12A и S12B, интенсивности и/или фазы принимаемых радиосигналов, и определения положения каждого фехтовальщика 2а, 2b вдоль платформы 1 в зависимости от интенсивности и/или фазы, измеренных для соответствующей частоты, в зависимости от известных положений радиоприемников 13. Более детально, сигналы S13A обрабатываются для измерения интенсивности и/или фазы принимаемых сигналов на частоте сигнала S12A, для того, чтобы определить положение фехтовальщика 2а, в то время как другие сигналы S13B обрабатываются для измерения интенсивности и/или фазы сигналов, принимаемых на частоте сигнала S12B, для того, чтобы определить положение фехтовальщика 2b. Следовательно, все сигналы S13A и S13B являются, во всей их полноте, индикаторами положения фехтовальщиков 2а и 2b.
Под интенсивностью принимаемого радиосигнала в данном документе подразумевается принимаемая мощность, измеряемая в dBm. Например, положение каждого фехтовальщика 2а, 2b может быть определено как среднее значение положений упомянутых двух или более радиоприемников 13, принимаемые сигналы которых на частоте, связанной с указанным фехтовальщиком 2а, 2b, имеют более высокие измеренные значения интенсивности.
В соответствии с дополнительным вариантом осуществления изобретения, непроиллюстрированным, и по существу производным от того, что изображено на Фиг.2, каждый радиоприемник 13 подходит для настройки поочередно, во временном разделении, в соответствии с известными методиками мультиплексирования с временным разделением на двух частотах радиосигналов S12A и S12B.
В соответствии с дополнительным вариантом осуществления настоящего изобретения, изображенным на Фиг.3, в котором оба фехтовальщика снова обозначены как 2, а соответствующие элементы обозначены теми же номерами и сокращениями, что и на Фиг.2, система 4 содержит вместо радиопередатчиков 12 и радиоприемников 13 по Фиг.2, множество оптических передатчиков 14, которые расположены в известных положениях и зафиксированы вдоль платформы 1, и определены относительно системы координат, объединенной с платформой 1 и на заданной высоте H над землей для передачи соответствующих пучков S14 оптического излучения и соответствующее множество оптических приемников 15, которые расположены на противоположной стороне платформы 1, так, что каждый оптический приемник 15 расположен перед соответствующим оптическим передатчиком 14, чтобы принимать соответствующий пучок S14 оптического излучения и обнаруживать возможное пересечение. Высота Н составляет примерно от 0,5 до 1 м.
Оптические передатчики 14 скомпонованы последовательно и равномерно распределены по отдельности вдоль более длинной стороны платформы 1. Оптические передатчики 14 включаются блоком 9 обработки и управления. Оптические передатчики 14 скомпонованы для излучения лазерных пучков инфракрасного излучения. Оптические приемники 15 скомпонованы последовательно и равномерно распределены по отдельности вдоль другой более длинной стороны 1а платформы 1. Оптические приемники 15 способны определять, какие пучки S14 оптического излучения пересекаются фехтовальщиками 2, двигающимися на платформе 1. Таким образом, оптические приемники 15 обеспечивают блок 9 обработки и управления электрическими сигналами S15 типа вкл/выкл, которые являются индикаторами возможного пересечения соответствующего пучка S14 оптического излучения, и которые, следовательно, однажды объединенные с информацией о положении соответствующих оптических приемников 15 вдоль платформы 1, являются индикаторами положения фехтовальщиков 2.
Вариант осуществления согласно Фиг.3 отличается от того что на Фиг.2, также тем, что блок 9 обработки и управления выполнен с возможностью определения положения двигающихся фехтовальщиков 2 в зависимости от сигналов S15 и положения оптических приемников 15, т.е. другими словами, положения указанных оптических приемников 15, которые обнаруживают пересечение соответствующего пучка S14 оптического излучения.
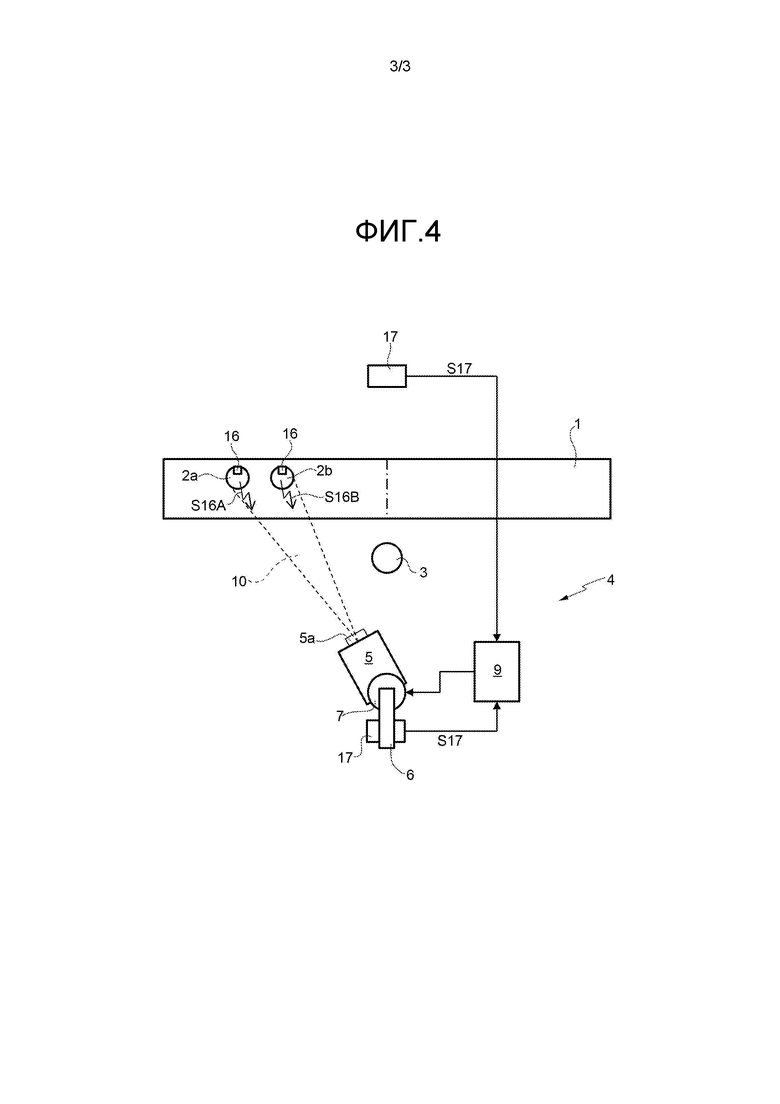
На Фиг.4 изображен дополнительный вариант осуществления настоящего изобретения, который является, по существу, развитием варианта осуществления по Фиг.2.
Со ссылкой на Фиг.4, система 4 содержит вместо двух радиопередатчиков 12 две соответствующие радиометки RFID 16, которые прикрепляются к телам соответствующих фехтовальщиков 2а и 2b таким же образом, как и радиопередатчики 12 и подходят для передачи соответствующих ультраширокополосных радиосигналов, обозначенных как S16A и A16B на Фиг.4, и, вместо радиоприемников 13 два приемных устройства 17, которые расположены в двух соответствующих положениях вокруг платформы 1, и каждый содержит соответствующую антенную решетку и соответствующее множество ультраширокополосных приемников для приема обоих сигналов S16A и S16B.
В примере, показанном на Фиг.4 два приемных устройства 17 скомпонованы обращенными друг к другу на противоположных сторонах платформы 1 на середине ее длины. В частности, одно из двух приемных устройств 17 крепится к опоре 6. В соответствии с альтернативой, которая не показана, два приемных устройства 17 скомпонованы на стороне одной и той же длины платформы 1 и предпочтительно выстроены параллельно платформе 1.
Полоса частот, используемая сигналами S16A и S16B, является полосой нелицензируемого типа и выделяется на частотах выше 3 ГГц. Например, полоса пропускания сигналов S16A и S16B выделяется в диапазоне частот между 3 ГГц и 11 ГГц.
Блок 9 обработки и управления соединен с приемными устройствами 17, чтобы получать от последних данные и / или электрические сигналы S17, которые являются индикаторами принятых сигналов S16A и S16B, и выполнен с возможностью определения положения двигающихся фехтовальщиков 2a и 2b в зависимости от сигналов, обеспечиваемых приемными устройствами 17. В частности, положение каждого фехтовальщика 2а и 2b определяется алгоритмом мультилатерации, основанным на расчете «временной разницы приема» сигналов, принятых от двух приемных устройств 17 для каждого из передаваемых сигналов S16A и A16B.
Согласно дополнительным непроиллюстрированным вариантам осуществления настоящего изобретения, система 4 содержит более двух приемных устройств 17, расположенных в соответствующих точках вокруг платформы 1. Большее число приемных устройств 17 позволяет повысить точность, с которой алгоритм мультилатерации определяет положения фехтовальщиков 2а и 2.
Стоит отметить, что методология, реализованная с помощью описанной выше системы 4, подходит для съемки любой пары спортсменов в любом виде спорта, когда они перемещаются на соответствующем игровом поле. В наиболее общем случае игровое поле не является одномерным, как платформа 1, но является двумерным, как, например, футбольное поле.
Вариант осуществления, в котором средство для определения положения спортсменов содержит радиопередатчики и приемники, хорошо подходит для использования в двумерных игровых полях, на которых двигаются более двух снимаемых спортсменов, но в парах, например для отслеживания и съемки защитника, намеревающегося помешать нападающему во время футбольного матча. В этом случае система 4 содержит число радиопередатчиков, равное числу спортсменов на игровом поле, чтобы передавать соответствующие радиосигналы, имеющие частоты, отличные одна от другой, и множество радиоприемников, расположенных вдоль, по меньшей мере, одной части периметра игрового поля, например, более короткая сторона и более длинная сторона футбольного поля. Пара снимаемых спортсменов легко выбираема, путем выбора двух частот, на которые каждый радиоприемник должен настроиться, частотным разделением или временным разделением. В случае использования методики частотного разделения каждый радиоприемник содержит число полосовых фильтров, равное числу частот, передаваемых передатчиками.
Вариант осуществления, в котором средство для определения положения спортсменов содержит оптические передатчики и приемники, хорошо подходит для использования в двумерных игровых полях, в которых движутся только два спортсмена, например для съемки двух каратистов, состязающихся на прямоугольной платформе для боя. В этом случае система 4 содержит множество оптических передатчиков, расположенных вдоль части периметра, например на двух ортогональных сторонах платформы и соответствующее множество оптических приемников, расположенных вдоль противоположной части периметра платформы для боя, например, на двух противоположных ортогональных сторонах платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления видеокамерами | 2023 |
|
RU2811574C1 |
| Способ оценки двигательных действий спортсмена в бадминтоне | 2019 |
|
RU2702822C1 |
| СПОСОБ ТРЕНИРОВКИ И ИНФОРМИРОВАНИЯ СПОРТСМЕНОВ | 2012 |
|
RU2484873C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЗАИМОДЕЙСТВИЯ СПОРТСМЕНОВ | 2017 |
|
RU2641972C1 |
| СПОСОБ ПОДГОТОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2550323C1 |
| СПОСОБ ПОДГОТОВКИ И ТЕСТИРОВАНИЯ СПОРТСМЕНОВ | 2017 |
|
RU2645505C1 |
| Комплексная система для тренировки спортсменов | 2019 |
|
RU2736099C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ ИЛИ ДЛЯ ПРОВЕДЕНИЯ ИГР | 2022 |
|
RU2782661C1 |
| СПОСОБ РЕГИСТРАЦИИ УКОЛОВ ПРИ ФЕХТОВАНИИ (ВАРИАНТЫ), СИСТЕМА РЕГИСТРАЦИИ УКОЛОВ ПРИ ФЕХТОВАНИИ, ИНДИВИДУАЛЬНЫЙ АППАРАТ СПОРТСМЕНА И НАКОНЕЧНИК ДЛЯ РЕГИСТРАЦИИ УКОЛОВ ПРИ ФЕХТОВАНИИ | 2005 |
|
RU2292933C2 |
| СПОСОБ ОЦЕНКИ РЕАКЦИИ СПОРТСМЕНА НА ДВИЖУЩИЙСЯ ОБЪЕКТ | 2016 |
|
RU2623995C1 |
Изобретение относится к области телевидения, в частности к управлению ориентацией мобильной видеокамеры для съемки двигающихся спортсменов. Техническим результатом является обеспечение регулировки ориентации первой мобильной видеокамеры для съемки пары спортсменов, двигающихся по игровому полю. Предложен способ регулировки ориентации мобильной видеокамеры (5) для съемки пары спортсменов (2), двигающихся по игровому полю (1), в котором положение спортсменов (2) определяется относительно системы координат, объединенной с игровым полем (1), с помощью радиопередатчиков (12; 16), которые прикрепляются к телам спортсменов (2) и радиоприемников (13; 17), скомпонованных вокруг и закрепленных относительно игрового поля (1) и взаимодействующих с блоком (9) обработки и управления, причем блок (9) обработки и управления определяет промежуточное положение между двумя спортсменами (2) как функцию текущих положений спортсменов (2), и приводимое в движение двигателем устройство (7) перемещает мобильную видеокамеру (5) таким образом, чтобы сцентрировать соответствующее кадрирование (10) на промежуточное положение. 2 н. и 3 з.п. ф-лы, 4 ил.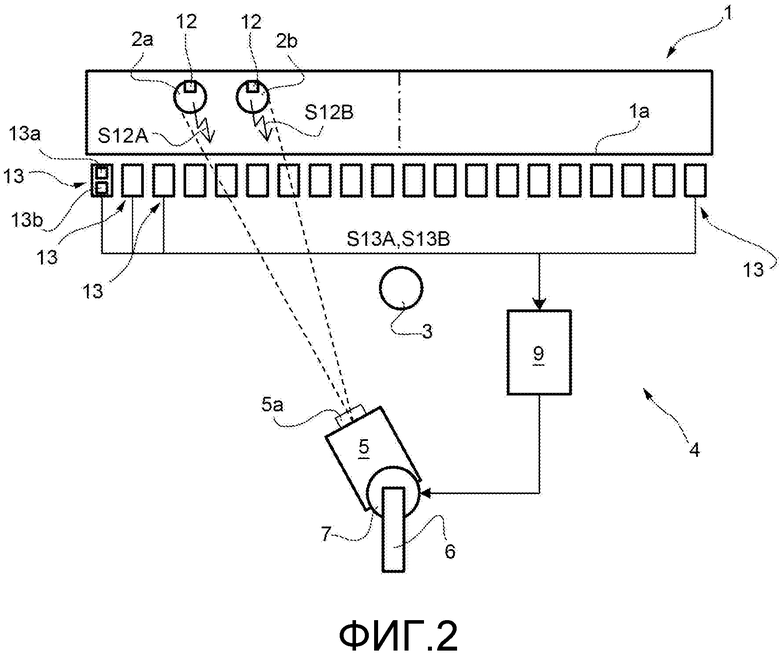
1. Способ для регулировки ориентации мобильной видеокамеры, подходящей для съемки пары спортсменов, двигающихся по игровому полю, причем способ содержит этапы, на которых:
- определяют положения двигающихся спортсменов (2) относительно системы координат, объединенной с игровым полем (1), посредством получения видеокамерой (8), которая расположена неподвижно относительно игрового поля (1) для кадрирования всего игрового поля (1) и взаимодействует со средством (9) обработки и управления, видеоизображений, указывающих текущие положения двигающихся спортсменов (2);
- определяют в реальном времени, посредством упомянутого средства (9) обработки и управления, промежуточное положение между двумя спортсменами (2) относительно упомянутой системы координат в зависимости от текущих положений двух спортсменов (2), указываемых упомянутыми видеоизображениями; и
- перемещают средством (7) перемещения с моторным приводом, управляемым упомянутым средством (9) обработки и управления, мобильную видеокамеру (5) таким образом, чтобы центрировать соответствующее кадрирование (10) на упомянутом промежуточном положении.
2. Способ по п. 1, в котором упомянутые видеоизображения получают в форме SV видеосигнала.
3. Способ по п. 1, в котором упомянутое определение промежуточного положения дополнительно содержит обработку видеоизображений, полученных видеокамерой (8), для:
идентификации силуэтов двигающихся спортсменов,
обработки каждого силуэта для того, чтобы определить положение соответствующего спортсмена относительно упомянутой системы координат, и
определения промежуточного положения между двумя спортсменами в зависимости от текущих положений упомянутых двух спортсменов.
4. Способ по п. 3, дополнительно содержащий обработку каждого силуэта для определения, в качестве положения соответствующего спортсмена, положения некоторой точки тела спортсмена в зоне кадрирования упомянутой фиксированной видеокамеры (8).
5. Система для съемки пары спортсменов (2), двигающихся по игровому полю (1), причем система (4) содержит:
мобильную видеокамеру (5) для съемки пары двигающихся спортсменов (2);
средство (7) перемещения с моторным приводом для перемещения упомянутой мобильной видеокамеры (5) путем изменения ее ориентации относительно игрового поля (1);
фиксированную видеокамеру (8), которая расположена неподвижно относительно игрового поля (1) для кадрирования всего игрового поля (1) для того, чтобы получать видеоизображения в форме видеосигнала, указывающие положение двигающихся спортсменов (2); и
средство (9) обработки и управления, которое взаимодействует с упомянутой фиксированной видеокамерой (8) и выполнено с возможностью определять в режиме реального времени, в зависимости от упомянутого видеосигнала, промежуточное положение между двумя спортсменами (2) относительно системы координат, которая объединена с игровым полем (1), и управлять средством (7) перемещения с моторным приводом таким образом, чтобы сцентрировать кадрирование (10) мобильной видеокамеры (5) на упомянутом промежуточном положении.
| US 2011050904 A1, 2011-03-03 | |||
| US 2008002031 A1, 2008-01-03 | |||
| US 2001002843 A1, 2001-06-07 | |||
| US 2004211883 A1, 2004-10-28 | |||
| WO 2012100231 A2, 2012-07-26 | |||
| RU 2009129556 A, 2011-02-10. |

