Изобретение относится к области телевидения, в частности к автоматизированному управлению видеокамерами в студийном помещении. Основной функцией системы является перемещение видеокамер в студийном помещении с целью съёмки происходящего внутри.
Известна система для съемки надвигающихся спортсменов [RU 2678572 C2, 30.01.2019], включающая мобильную видеокамеру для съемки пары двигающихся спортсменов; средство перемещения с моторным приводом для перемещения упомянутой мобильной видеокамеры путем изменения ее ориентации относительно игрового поля; фиксированную видеокамеру, которая расположена неподвижно относительно игрового поля для кадрирования всего игрового поля для того, чтобы получать видеоизображения в форме видеосигнала, указывающие положение двигающихся спортсменов; средство обработки и управления, которое взаимодействует с упомянутой фиксированной видеокамерой и выполнено с возможностью определять в режиме реального времени, в зависимости от упомянутого видеосигнала, промежуточное положение между двумя спортсменами относительно системы координат, которая объединена с игровым полем, и управлять средством перемещения с моторным приводом таким образом, чтобы сцентрировать кадрирование мобильной видеокамеры на упомянутом промежуточном положении.
Недостатками системы являются: по определению текущего положения двигающихся спортсменов производится центрирование мобильной видеокамеры, что является лишь одной из разновидностью плана в съемочном процессе и является недостаточным для полноценной съемки телепрограммы; жесткая привязка к координатам положения двигающихся спортсменов приводит к тому, что из поля зрения видеокамер упускаются детали происходящего, например, полет мяча и другие элементы, что является важным в съемочном процессе; возможна ситуация, при которой в поле зрения видеокамеры попадает другая видеокамера, поскольку в процессе съёмки одного мероприятия могут быть задействованы несколько видеокамер, что приводит к порче кадра.
Наиболее близким решением является, принятым за прототип, является система для видеосъемки [RU 2705102 C1, 05.11.2019], включающая: отдельные управляемые единицы системы, предназначенные для перемещения и управления параметрами работы устройства для видеосъемки; общий модуль управления (ОМУ)/согласующий электронный блок (СЭБ), выполненный с возможностью записи в память сигналов, управляющих отдельными единицами системы. В частности: устройство для видеозаписи выполнено в виде кинокамеры, видеокамеры, телекамеры или цифрового фотоаппарата с возможностью видеозаписи или смартфона со встроенной камерой; устройства, предназначенные для перемещения в пространстве устройства для видеозаписи, выбраны из группы, содержащей: операторский кран, операторскую тележку, панорамную головку. Дополнительно система может содержать: управляемые единицы, предназначенные для перемещения и управления параметрами работы оборудования для видеосъемки, а именно микрофон, источник света, источник звука, управляемые вручную, при помощи по меньшей мере одного пульта управления, с возможностью записи управляющих сигналов в ОМУ/СЭБ и/или управляющими сигналами с ОМУ/СЭБ. Дополнительно в устройстве ОМУ/СЭБ может быть реализован процесс анализа изображения, поступающего от устройства для видеозаписи, что позволяет в автоматическом режиме управлять исполнительными механизмами таким образом, чтобы обеспечить заданные перемещения устройства для видеозаписи относительно объекта съемки.
Признаки прототипа, являющиеся общими с заявляемой системой управления, - видеокамеры и устройства для перемещения видеокамер в пространстве.
Недостатки прототипа: долгое время на настройку оборудования и его быстрый износ, поскольку приходится производить физическое перемещение этого оборудования для записи координат перемещения в запоминающее устройство; возможность обеспечить удержание движущегося объекта съёмки в поле зрения объектива для создания художественного эффекта не всегда является достаточным, поскольку могут упускаться другие «планы» - деления кинематографического пространства; отсутствуют функциональные возможности определения попадания в поле зрения видеокамеры другой видеокамеры или оператора с ней, что приводит к порче сцены; отсутствует защита от столкновений видеокамер между собой; отсутствует возможность автоматической адаптации направления видеокамер под людей, находящихся в кадре, то есть возможна ситуация, при которой видеокамера не успеет навести объектив на человека, начавшего говорить или производить какие-либо действия, так как была направлена на другой объект; отсутствует возможность самообучения, при котором в поле зрения объектива попадали бы только те объекты и люди, и только в тех «планах», которые согласуются с режиссёром.
Задачей изобретения является разработка системы управления видеокамерами, позволяющей: уменьшить время на настройку оборудования перед съёмкой; увеличить количество снимаемых «планов» при привязке объектов, находящихся в студии; обеспечить отсутствие видеооператора и видеокамеры в объективе другой видеокамеры; обеспечить защиту от столкновений видеокамер и поддерживающих их устройств между собой; обеспечить автоматическую адаптацию направления видеокамер под людей, находящихся в кадре; обеспечить попадание в поле зрения объектива только тех объектов и людей, и только в тех «планах», которые согласуются с режиссёром.
Решение этой задачи является актуальным в связи с усложнением технологического оборудования, используемого при съёмке в студии, что влечет необходимость привлечения более квалифицированных специалистов, что удорожает стоимость конечного телевизионного продукта.
Поставленная задача была решена за счет того, что известная система управления видеокамерами, включающая видеокамеры и устройства для перемещения видеокамер в пространстве, согласно изобретению дополнительно содержит
блок автоматизации, выполненный с возможностью программирования и множеством входов/выходов для подключения внешних устройств, и соединённый с пультом режиссера, выполненного с возможностью переключения активных видеокамер в процессе съёмки, видеокамерами для съёмки, контроллерами электроприводов перемещения по осям X, Y, Z видеокамер, контроллерами электроприводов позиционирования по осям X, Y, Z объектива видеокамер, статичными видеокамерами для анализа происходящего, лазерными дальномерами по каждой оси X, Y, Z видеокамер, акселерометрами для определения положения в пространстве видеокамер,
при этом блок автоматизации содержит
модуль приёма видеоизображения со статичных видеокамер, соединённый с модулем преобразования видеоизображения в наборы признаков с определением координат действующих объектов, реализующий алгоритмы определения у каждого кадра входного видеопотока признаков, которыми он характеризуется, а именно наличием действий у динамических объектов и изменения цвета, фона или формы у статических объектов по базе данных наборов признаков, с которой связан, а также определением внутренних координат этих объектов, в рамках помещения, где происходит видеозапись, при этом выходные данные модуля передаются в модуль прогнозирования развития ситуации, реализующий интеллектуальные алгоритмы преобразования поступающей на вход последовательности признаков кадров в набор признаков, характеризующих действия, которые могут произойти в ближайшее время и координат объектов, как они будут изменяться в течении этого ближайшего времени,
модуль приёма видеоизображения с видеокамер для съёмки, соединённый с модулем отправки видеоизображения на пульт режиссера,
модуль приёма сигналов по переключению видеокамер с пульта режиссера, выход которого соединён с модулем сохранения видеопотока и действий по переключению видеокамер в базу данных, на вход которого также поступает видеопоток из модуля приёма видеоизображения с видеокамер для съёмки, при этом выход соединен с базой данных, хранящей видео и выбор активного видеопотока в каждый интервал времени,
модуль распознавания объектов на кадрах и «плана» кадра, и их сопоставление с активным видеопотоком, реализующий интеллектуальные алгоритмы, которые берут данные из базы данных с видео и выбором активного видеопотока в каждый интервал времени, обрабатывают их на предмет распознавания статических и динамических объектов в кадре и определения «плана» - деления кинематографического пространства, делая метки у активного видеопотока, выбранного режиссеров в каждый интервал времени, и производят запись выходной информации в базу данных распознанных объектов, «плана» кадра и выбранных режиссером сцен,
модуль прогнозирования наилучшего кадра, связанный с модулем прогнозирования развития ситуации и базой данных распознанных объектов, «плана» кадра и выбранных режиссером сцен, реализующий интеллектуальные алгоритмы выбора объектов для съёмки, ракурса съёмки и меры приближения к ним, которые основываются на прогнозной информации о том, как будет развиваться ситуация и какие решения принимал режиссер в подобных ситуациях ранее,
модуль расчета координат расположения видеокамер и их объективов, на вход которого поступает информация из блока прогнозирования наилучшего кадра, а на выходе выдаёт информацию о координатах локального пространства, где необходимо расположить видеокамеру и объектив, чтобы сделать прогнозный кадр,
модуль расчёта траекторий движения каждой видеокамеры на вход получает информацию из блока расчета координат расположения видеокамер и их объективов, и для каждой координаты, в которой должна оказаться видеокамера рассчитывает траекторию её движения до этой точки, при этом рассчитанные траектории движения анализируются в соединённых с ним модулях, а именно модуле определения попадания видеокамеры в объектив другой видеокамеры и модуле определения риска возникновения столкновения видеокамер и перемещающих их устройств, выходные данные из которых поступают на вход модуля корректировки траекторий движения каждой видеокамеры,
модуль приёма сигнала с лазерных дальномеров, соединённый с модулем определения риска столкновения с объектами, который реализует алгоритмы расчета расстояния до объектов и определения степени риска столкновения с ними, выход которого соединен с модулем корректировки траекторий движения каждой видеокамеры, реализующем алгоритмы изменения ранее принятой траектории с изменившимися условиями,
модуль приёма сигнала с акселерометров, соединенный с модулем расчета отклонений и определения корректирующих воздействий, который реализует алгоритмы определения отклонения видеокамеры и объектива от расчетной траектории, а также определение корректирующих воздействий для контроллеров электроприводов перемещения видеокамер и позиционирования объективов видеокамер,
модуль отправки данных в контроллеры электроприводов видеокамер и их объективов, соединенный с модулем корректировки траекторий движения каждой видеокамеры и модулем расчета отклонений и определения корректирующих воздействий, реализующий алгоритм отправления поступающих на вход данных.
Отличительные признаки предлагаемой системы – введены блок автоматизации; пульт режиссера; контроллеры электроприводов перемещения по осям X, Y, Z видеокамер; контроллеры электроприводов позиционирования по осям X, Y, Z объектива видеокамер; акселерометры для определения положения в пространстве видеокамер; статичные видеокамеры для анализа происходящего; лазерные дальномеры по каждой оси X, Y, Z видеокамер; модуль приёма видеоизображения со статичных видеокамер; модуль преобразования видеоизображения в наборы признаков с определением координат действующих объектов; база данных наборов признаков; модуль прогнозирования развития ситуации; модуль прогнозирования наилучшего кадра; модуль приёма видеоизображения с видеокамер для съёмки; модуль отправки видеоизображения на пульт режиссера; модуль приёма сигналов по переключению видеокамер с пульта режиссера; модуль сохранения видеопотока и действий по переключению видеокамер в базу данных; база данных с видео и выбором активного видеопотока в каждый интервал времени; модуль распознавания объектов на кадрах и «плана» кадра, и их сопоставление с активным видеопотоком; база данных распознанных объектов, «плана» кадра и выбранных режиссером сцен; модуль расчета координат расположения видеокамер и их объективов; модуль расчёта траекторий движения каждой видеокамеры; модуль определения попадания видеокамеры в объектив другой видеокамеры; модуль определения риска возникновения столкновения видеокамер и перемещающих их устройств; модуль приёма сигнала с лазерных дальномеров; модуль определения риска столкновения с объектами; модуль корректировки траекторий движения каждой видеокамеры; модуль приёма сигнала с акселерометров; модуль расчета отклонений и определения корректирующих воздействий; модуль отправки данных в контроллеры электроприводов видеокамер и их объективов.
Отличительные признаки в совокупности с известными позволяют достичь уменьшение времени на настройку оборудования перед съёмкой; увеличение количества снимаемых «планов» при привязке объектов, находящихся в студии; отсутствие видеооператора и видеокамеры в объективе другой видеокамеры; защиту от столкновений видеокамер и поддерживающих их устройств между собой; автоматическую адаптация направления видеокамер под людей, находящихся в кадре; попадание в поле зрения объектива только тех объектов и людей, и только в тех «планах», которые согласуются с режиссёром.
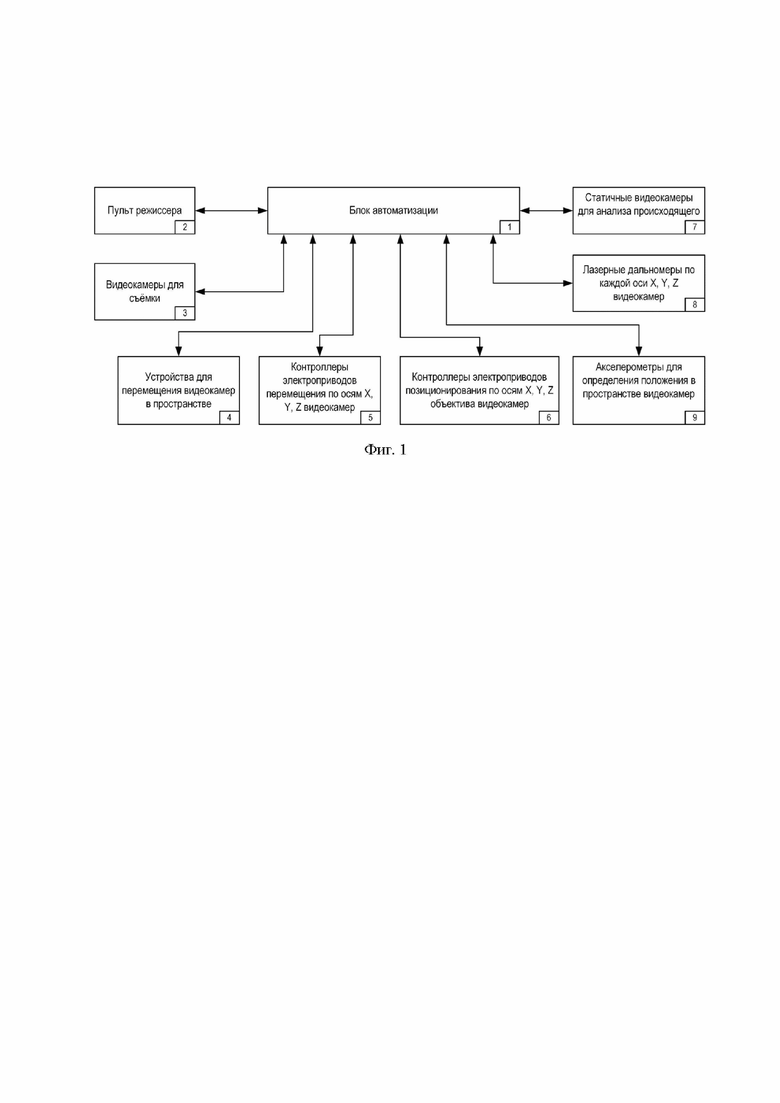
На фиг. 1 изображена структурная схема системы управления видеокамерами в общем виде.
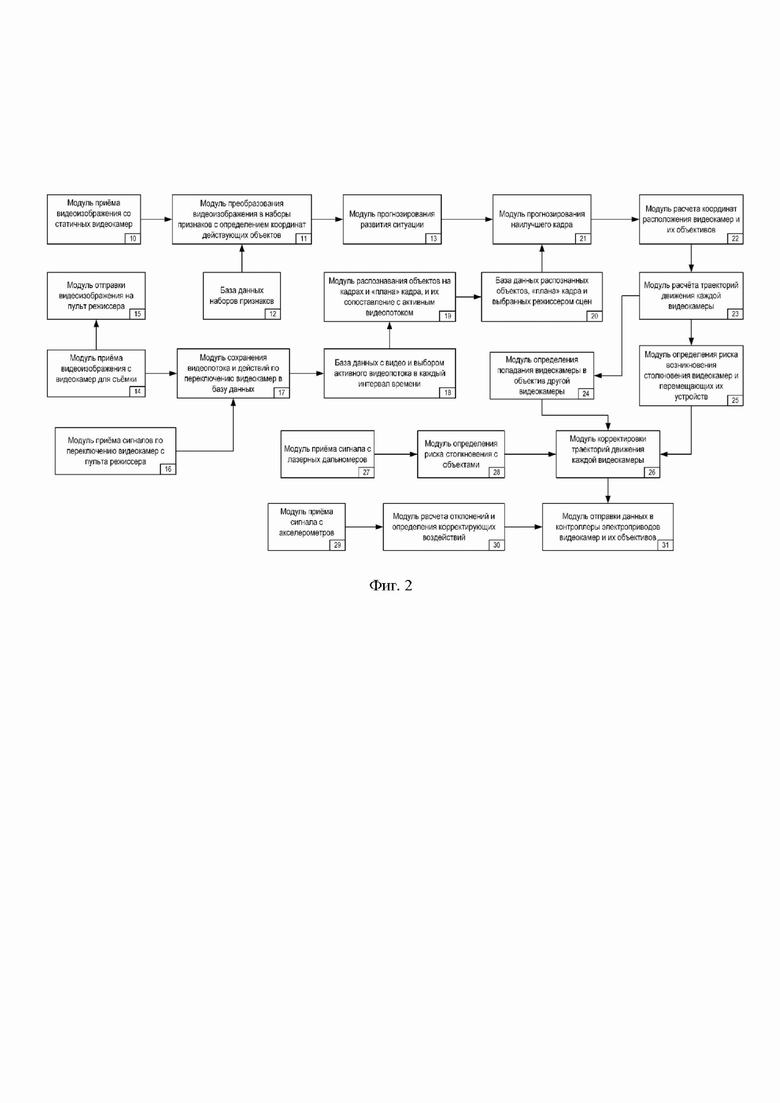
На фиг. 2 изображена структурная схема блока автоматизации системы управления видеокамерами.
Система управления видеокамерами (фиг.1) включает блок автоматизации 1, выполненный с возможностью программирования и множеством входов/выходов для подключения внешних устройств. Блок автоматизации 1 соединён с пультом режиссера 2, выполненным с возможностью переключения активных видеокамер в процессе съёмки, видеокамерами для съёмки 3, устройствами для перемещения видеокамер в пространстве 4, контроллерами электроприводов перемещения по осям X, Y, Z видеокамер 5, контроллерами электроприводов позиционирования по осям X, Y, Z объектива видеокамер 6, статичными видеокамерами для анализа происходящего 7, лазерными дальномерами по каждой оси X, Y, Z видеокамер 8, акселерометрами для определения положения в пространстве видеокамер 9.
Блок автоматизации 1 (фиг.2) содержит модуль приёма видеоизображения со статичных видеокамер 10, соединённый с модулем преобразования видеоизображения в наборы признаков с определением координат действующих объектов 11, реализующим алгоритмы определения у каждого кадра входного видеопотока признаков, которыми он характеризуется, а именно наличием действий у динамических объектов и изменения цвета, фона или формы у статических объектов по базе данных наборов признаков 12, с которой связан, а также определением внутренних координат этих объектов, в рамках помещения, где происходит видеозапись. При этом выходные данные модуля 11 передаются в модуль прогнозирования развития ситуации 13, реализующий интеллектуальные алгоритмы преобразования поступающей на вход последовательности признаков кадров в набор признаков, характеризующих действия, которые могут произойти в ближайшее время и координат объектов, как они будут изменяться в течении этого ближайшего времени.
Блок автоматизации 1 содержит модуль приёма видеоизображения с видеокамер для съёмки 14, соединённый с модулем отправки видеоизображения на пульт режиссера 15, модуль приёма сигналов по переключению видеокамер с пульта режиссера 16. Выход модуля приёма сигналов по переключению видеокамер с пульта режиссера 16 соединён с модулем сохранения видеопотока и действий по переключению видеокамер в базу данных 17, на вход которого также поступает видеопоток из модуля приёма видеоизображения с видеокамер для съёмки 14. Выход модуля 17 соединен с базой данных, хранящей видео и выбор активного видеопотока в каждый интервал времени 18.
Блок автоматизации 1 содержит модуль распознавания объектов на кадрах и «плана» кадра, и их сопоставление с активным видеопотоком 19, реализующий интеллектуальные алгоритмы, которые берут данные из базы данных с видео и выбором активного видеопотока в каждый интервал времени 18, обрабатывают их на предмет распознавания статических и динамических объектов в кадре и определения «плана» - деления кинематографического пространства, делая метки у активного видеопотока, выбранного режиссеров в каждый интервал времени, и производят запись выходной информации в базу данных распознанных объектов, «плана» кадра и выбранных режиссером сцен 20.
Модуль прогнозирования развития ситуации 13 соединен с модулем прогнозирования наилучшего кадра 21, связанным с базой данных распознанных объектов, «плана» кадра и выбранных режиссером сцен 20, реализующем интеллектуальные алгоритмы выбора объектов для съёмки, ракурса съёмки и меры приближения к ним, которые основываются на прогнозной информации о том, как будет развиваться ситуация и какие решения принимал режиссер в подобных ситуациях ранее.
Выход модуля прогнозирования наилучшего кадра 21 соединен с модулем расчета координат расположения видеокамер и их объективов 22, выполненным с возможностью выдачи информацию о координатах локального пространства, где необходимо расположить видеокамеру и объектив, чтобы сделать прогнозный кадр. Выход модуля расчета координат расположения видеокамер и их объективов 22 соединен с модулем расчёта траекторий движения каждой видеокамеры 23.
Выходы модуля расчёта траекторий движения каждой видеокамеры 23 соединены с модулем определения попадания видеокамеры в объектив другой видеокамеры 24 и модулем определения риска возникновения столкновения видеокамер и перемещающих их устройств 25. Выходы модуля определения попадания видеокамеры в объектив другой видеокамеры 24 и модуля определения риска возникновения столкновения видеокамер и перемещающих их устройств 25 соединены с модулем корректировки траекторий движения каждой видеокамеры 26.
Блок автоматизации 1 содержит модуль приёма сигнала с лазерных дальномеров 27, соединённый с модулем определения риска столкновения с объектами 28, реализующий алгоритмы расчета расстояния до объектов и определения степени риска столкновения с ними. Выход модуля определения риска столкновения с объектами 28 соединен с модулем корректировки траекторий движения каждой видеокамеры 26, который реализует алгоритмы изменения ранее принятой траектории с изменившимися условиями.
Блок автоматизации 1 содержит модуль приёма сигнала с акселерометров 29, соединенный с модулем расчета отклонений и определения корректирующих воздействий 30, реализующем алгоритмы определения отклонения видеокамеры и объектива от расчетной траектории, а также определение корректирующих воздействий для контроллеров электроприводов перемещения видеокамер и позиционирования объективов видеокамер. Выход модуля расчета отклонений и определения корректирующих воздействий 30 соединен с модулем отправки данных в контроллеры электроприводов видеокамер и их объективов 31, реализующем алгоритм отправления поступающих на вход данных и соединенным с модулем корректировки траекторий движения каждой видеокамеры 26.
Система работает следующим образом. Сначала её внедряют в студийном помещении, в котором планируется запись телепрограммы. Под внедрением понимается размещение в студийном помещении всех механических узлов, представленных в системе, и их подключение к блоку автоматизации 1, в который загружено программное обеспечение, реализующее алгоритмы управления подключенным оборудованием. Статичные видеокамеры 7 размещают таким образом, чтобы обеспечивался максимальный охват всего студийного пространства. Устройства для перемещения видеокамер 4 размещают таким образом, чтобы обеспечивалось перемещение видеокамер для съёмки 3 по трём основным направлениям X, Y и Z.
После подключения всех узлов системы, начинается съёмочный процесс, который подразумевает ручное управление пультом режиссера, а также наличие динамических и статических сцен в той области студийного пространства, где планируется съёмка. Статичные видеокамеры 7 передают видеоизображение в блок автоматизации 1, где его принимает модуль 10. Затем этот видеопоток преобразуется в наборы признаков с определением координат действующих объектов в модуле 11. Для того, чтобы сопоставлять уже известные признаки с видеопотоком и происходящими действиями на нем, имеется база данных наборов признаков 12. После того, как все признаки считаны, они подаются в модуль прогнозирования ситуации 13, где по их последовательности интеллектуальные алгоритмы определяют, что с определенной долей вероятности будет происходить на сцене дальше.
Параллельно процессу приёма изображения со статичных видеокамер, принимается видеоизображения и с видеокамер для съёмки 3 с помощью модуля 14. Это видеоизображение с помощью модуля 15 отправляется на пульт режиссера 2. В этот же момент времени режиссер решает какой из видеопотоков сделать активным и его действия по переключению принимаются модулем 16 в блоке автоматизации 1, и передаются в модуль 17. Модуль 17 сохраняет видеопоток и действия по переключению видеокамер, которые режиссер делает активными в разные моменты времени в базу данных 18. Затем эти данные обрабатываются на предмет распознания статических и динамических объектов в кадре и определяется «план» - деление кинематографического пространства, при этом делаются метки у активного видеопотока, выбранного режиссером в модуле 19. Данная информация сохраняется в базе данных 20.
После чего в работу вступает модуль 21, который берет данные о прогнозной информации, что будет происходить дальше от модуля 13 и набор распознанных объектов, «плана» кадра и выбранных режиссером сцен из базы данных 20, и с помощью интеллектуальных алгоритмов прогнозирует наилучший кадр. Затем, чтобы видеокамеры 3 смогли произвести запись этого кадра, производится расчет координат расположения видеокамер и их объективов в модуле 22. После чего эти данные пересылаются в модуль 23, где происходит расчет траекторий движения каждой видеокамеры, чтобы произвести видеосъемку соответствующих кадров.
Затем происходит определение, попадают или нет видеокамеры в объективы других видеокамер с помощью модуля 24 и просчитываются риски столкновений видеокамер и перемещающих их устройств между собой в модуле 25. Если такие риски найдены, то происходит корректировка траекторий движений видеокамер 3 с помощью модуля 26, где просчитываются новые траектории движения с учетом выявленных рисков. Параллельно этому принимаются сигналы с лазерных дальномеров 8 с помощью модуля 27 и определяется риск возникновения столкновения с объектами, находящими в студийном помещении с помощью модуля 28. Затем, если такие риски выявлены, то данные об этом передаются в модуль 26, где происходит корректировка траекторий движения видеокамер.
Затем происходит прием сигнала с акселерометров 9 при помощи модуля 29, и на основе этих данных производится расчет отклонений и определение корректирующих воздействий при помощи модуля 30. Данные о заданной траектории движения видеокамер и о корректирующих воздействиях стекаются в модуль 31, который отправляет их в контроллеры электроприводов видеокамер и их объективов. Затем контроллеры 5 и 6 производят выдачу управляющих воздействий на устройства перемещения видеокамер в пространстве 4. Таким образом осуществляется процесс съёмки. Чтобы произвести новый кадр необходимо повторить все действия, изложенные ранее, снова.
Изобретение относится к области телевидения, в частности к автоматизированному управлению видеокамерами в студии. Техническим результатом является уменьшение времени на настройку оборудования; увеличение количества снимаемых «планов» при привязке объектов в студии; защита от столкновений видеокамер; автоматическая адаптация направления видеокамер под людей в кадре. Предложена система управления видеокамерами, состоящая из видеокамер; устройства для перемещения видеокамер в пространстве; блока автоматизации; пульта режиссера; контроллеров электроприводов перемещения видеокамер и позиционирования объектива видеокамер по осям X, Y, Z; акселерометров определения положения в пространстве видеокамер; статичных видеокамер для анализа происходящего; лазерных дальномеров по каждой оси X, Y, Z видеокамер; модуля приёма видеоизображения со статичных видеокамер; модуля преобразования видеоизображения в наборы признаков с определением координат объектов; базы данных наборов признаков; модуля прогнозирования развития ситуации; модуля прогнозирования наилучшего кадра; модуля приёма видеоизображения с видеокамер для съёмки; модуля отправки видеоизображения на пульт режиссера; модуля приёма сигналов по переключению видеокамер с пульта режиссера; модуля сохранения видеопотока и действий по переключению видеокамер в базу данных; базы данных с видео и выбором активного видеопотока в каждый интервал времени; модуля распознавания объектов на кадрах и «плана» кадра и их сопоставление с активным видеопотоком; базы данных распознанных объектов, «плана» кадра и выбранных режиссером сцен; модуля расчета координат расположения видеокамер и их объективов; модуля расчёта траекторий движения каждой видеокамеры; модуля определения попадания видеокамеры в объектив другой видеокамеры; модуля определения риска возникновения столкновения видеокамер и перемещающих их устройств; модуля приёма сигнала с лазерных дальномеров; модуля определения риска столкновения с объектами; модуля корректировки траекторий движения каждой видеокамеры; модуля приёма сигнала с акселерометров; модуля расчета отклонений и определения корректирующих воздействий; модуля отправки данных в контроллеры электроприводов видеокамер и их объективов. 2 ил.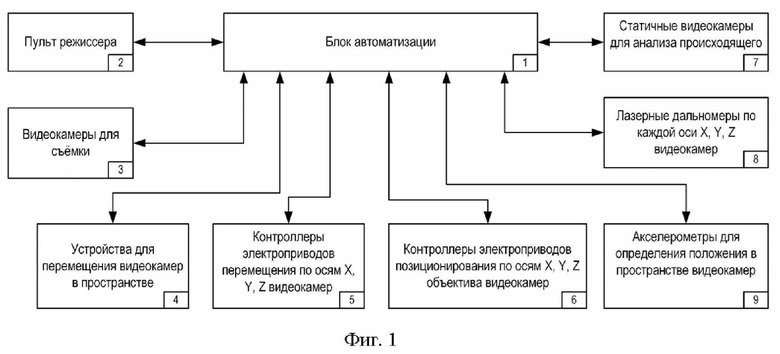
Система управления видеокамерами, включающая видеокамеры и устройства для перемещения видеокамер в пространстве, отличающаяся тем, что содержит блок автоматизации, выполненный с возможностью программирования и множеством входов/выходов для подключения внешних устройств и соединённый с пультом режиссера, выполненным с возможностью переключения активных видеокамер в процессе съёмки, видеокамерами для съёмки, устройствами для перемещения видеокамер в пространстве, контроллерами электроприводов перемещения по осям X, Y, Z видеокамер, контроллерами электроприводов позиционирования по осям X, Y, Z объектива видеокамер, статичными видеокамерами для анализа происходящего, лазерными дальномерами по каждой оси X, Y, Z видеокамер, акселерометрами для определения положения в пространстве видеокамер, при этом блок автоматизации содержит модуль приёма видеоизображения со статичных видеокамер, соединённый с модулем преобразования видеоизображения в наборы признаков с определением координат действующих объектов, реализующий алгоритмы определения у каждого кадра входного видеопотока признаков, которыми он характеризуется, а именно наличием действий у динамических объектов и изменения цвета, фона или формы у статических объектов по базе данных наборов признаков, с которой связан, а также определением внутренних координат этих объектов, в рамках помещения, где происходит видеозапись, выход модуля преобразования видеоизображения в наборы признаков с определением координат действующих объектов соединен с модулем прогнозирования развития ситуации, реализующим интеллектуальные алгоритмы преобразования поступающей на вход последовательности признаков кадров в набор признаков, характеризующих действия, которые могут произойти в ближайшее время, и координат объектов, как они будут изменяться в течение этого ближайшего времени; модуль приёма видеоизображения с видеокамер для съёмки, соединённый с модулем отправки видеоизображения на пульт режиссера; модуль приёма сигналов по переключению видеокамер с пульта режиссера, выход которого соединён с модулем сохранения видеопотока и действий по переключению видеокамер в базу данных, вход которого соединен с модулем приёма видеоизображения с видеокамер для съёмки, а выход соединен с базой данных, хранящей видео и выбор активного видеопотока в каждый интервал времени; модуль распознавания объектов на кадрах и «плана» кадра и их сопоставление с активным видеопотоком выполнен с возможностью обработки данных на предмет распознавания статических и динамических объектов в кадре и определения «плана» - деления кинематографического пространства, делая метки у активного видеопотока, выбранного режиссером в каждый интервал времени, вход модуля распознавания объектов на кадрах и «плана» кадра и их сопоставление с активным видеопотоком соединен с базой данных с видео и выбором активного видеопотока в каждый интервал времени, а выход соединен с базой данных распознанных объектов, «плана» кадра и выбранных режиссером сцен, при этом модуль прогнозирования развития ситуации соединен с модулем прогнозирования наилучшего кадра, связанным с базой данных распознанных объектов, «плана» кадра и выбранных режиссером сцен, реализующим интеллектуальные алгоритмы выбора объектов для съёмки, ракурса съёмки и меры приближения к ним, которые основываются на прогнозной информации о том, как будет развиваться ситуация и какие решения принимал режиссер в подобных ситуациях ранее, выход модуля прогнозирования наилучшего кадра соединен с модулем расчета координат расположения видеокамер и их объективов, выполненным с возможностью выдачи информацию о координатах локального пространства, где необходимо расположить видеокамеру и объектив, чтобы сделать прогнозный кадр, выход модуля расчета координат расположения видеокамер и их объективов соединен с модулем расчёта траекторий движения каждой видеокамеры, выходы которого соединены с модулем определения попадания видеокамеры в объектив другой видеокамеры и модулем определения риска возникновения столкновения видеокамер и перемещающих их устройств, при этом выходы модуля определения попадания видеокамеры в объектив другой видеокамеры и модуля определения риска возникновения столкновения видеокамер и перемещающих их устройств соединены с модулем корректировки траекторий движения каждой видеокамеры; модуль приёма сигнала с лазерных дальномеров, соединённый с модулем определения риска столкновения с объектами, реализующий алгоритмы расчета расстояния до объектов и определения степени риска столкновения с ними, выход которого соединен с модулем корректировки траекторий движения каждой видеокамеры, реализующим алгоритмы изменения ранее принятой траектории с изменившимися условиями; модуль приёма сигнала с акселерометров, соединенный с модулем расчета отклонений и определения корректирующих воздействий, реализующий алгоритмы определения отклонения видеокамеры и объектива от расчетной траектории, а также определение корректирующих воздействий для контроллеров электроприводов перемещения видеокамер и позиционирования объективов видеокамер; при этом выход модуля расчета отклонений и определения корректирующих воздействий соединен с модулем отправки данных в контроллеры электроприводов видеокамер и их объективов, реализующим алгоритм отправления поступающих на вход данных и соединенным с модулем корректировки траекторий движения каждой видеокамеры.
| US 2006221187 A1 - 2006.10.05 | |||
| US 11120638 B2 - 2021.09.14 | |||
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| Система автоматического создания сценарного видеоролика с присутствием в кадре заданного объекта или группы объектов | 2020 |
|
RU2748581C1 |
| US 7187401 B2 - 2007.03.06 | |||
| US 2011052000 A1 - 2011.03.03 | |||
| СПОСОБ И СИСТЕМА ДЛЯ ПРОИЗВОДСТВА ВИДЕОПРОДУКЦИИ | 2014 |
|
RU2666137C2 |

