Область техники, к которой относится изобретение
Изобретение относится к устройству ручки управления полетом летательного аппарата. Например, устройство является устройством ручки управления общим шагом винта вертолета.
Уровень техники
Как правило, вертолеты оснащены тремя приводами управления полетом, приводимыми в действие пилотом: ручкой управления общим шагом винта, ручкой управления циклическим шагом винта и педалями противодействия разворачивающему моменту. Ручка общего шага позволяет коллективно изменять угол атаки лопастей несущего винта для подъема или снижения, ускорения или замедления вертолета. Ручка циклического шага позволяет циклично изменять угол атаки лопастей несущего винта во время вращения, чтобы создавать разную тягу в разных точках цикла, наклоняя вертолет вперед или назад (угол тангажа) или на один или другой бок (угол крена). Педали противодействия разворачивающему моменту позволяют изменять шаг лопастей вспомогательного винта, который позволяет изменять момент, создаваемый несущим винтом, таким образом, чтобы поворачивать вертолет (поворот относительно вертикальной оси) в режиме висения.
Традиционно, в вертолетах с гидравлическими приводами управления полетом ручка общего шага соединена с гидравлическими золотниками через механическую трансмиссию (называемую “trim”), находящуюся под полом кабины. Гидравлические золотники управляют силовыми приводами, которые контролируют ориентацию лопастей несущего винта.
В вертолетах с электрическими приводами управления полетом ручка общего шага не соединена механически с силовыми приводами. Для приводов этого типа существуют системы, позволяющие создавать возвратное усилие на ручке управления, чтобы пилот мог чувствовать силу сопротивления на ручке.
В настоящее время системы, позволяющие создавать возвратное усилие, в основном являются пассивными механическими системами, которые не обеспечивают динамической реконфигурации поведения ручки в зависимости от области полета. Иначе говоря, усилие, ощущаемое пилотом, всегда является одинаковым, независимо от условий полета.
Желательно разработать активные системы создания возвратного усилия, позволяющие изменять усилие, ощущаемое пилотом, в зависимости от условий полета. В частности, в сложных условиях полета желательно применять возвратное усилие, дающее пилоту тактильные ощущения пределов области полета, например, не позволяющее пилоту перемещать ручку в крайние положения, которые могут оказаться опасными.
Однако до настоящего времени такие активные системы возвратного усилия не находили применения в вертолетах, в частности, поскольку эти системы обязательно включают в себя механизированные приводы, которые характеризуются рисками поломки. Поломка механизированного привода может привести к блокировке ручки, что может повлечь за собой катастрофические последствия.
Раскрытие сущности изобретения
Задача изобретения состоит в создании устройства ручки управления полетом летательного аппарата, включающего в себя систему возвратного усилия, которое не приводит к блокировке ручки в случае неисправности системы.
В рамках настоящего изобретения эта задача решена при помощи устройства ручки управления полетом летательного аппарата, содержащего:
- картер, предназначенный для крепления на конструкции летательного аппарата,
- выходной вал, предназначенный для соединения с ручкой управления полетом, при этом выходной вал установлен с возможностью вращения относительно картера,
- первичный канал, содержащий первый орган создания крутящего момента, выполненный с возможностью действия на выходной вал первым крутящим моментом,
- вторичный канал, содержащий второй орган создания крутящего момента, выполненный с возможностью действия на выходной вал вторым крутящим моментом, и
- сцепление, выполненное с возможностью выборочного соединения первичного канала и вторичного канала с выходным валом.
Таким образом, в случае неисправности или заклинивания компонента первичного канала сцепление позволяет соединить вторичный канал с выходным валом. Таким образом, вторичный канал подменяет первичный канал.
Вторичный канал позволяет удерживать ручку в рабочем состоянии, несмотря на возможную потерю первого органа создания крутящего момента на первичном канале.
Устройство может также иметь следующие отличительные признаки:
- сцепление содержит деталь сцепления, подвижную относительно картера и выполненную с возможностью перемещения между первым положением, в котором деталь сцепления взаимодействует с первичным каналом, и вторым положением, в котором деталь сцепления взаимодействует с вторичным каналом,
- сцепление содержит электромагнит, который при получении питания действует на деталь сцепления в направлении первого положения,
- сцепление содержит упругий возвратный орган, выполненный с возможностью воздействия на деталь сцепления в направлении второго положения,
- деталь сцепления выполнена с возможностью поступательного перемещения относительно картера,
- выходной вал выполнен с возможностью вращения относительно картера вокруг оси вращения, и деталь сцепления выполнена с возможностью поступательного перемещения относительно картера параллельно оси вращения выходного вала,
- деталь сцепления неподвижно соединена во вращении с выходным валом, сохраняя при этом возможность поступательного перемещения относительно выходного вала,
- устройство содержит гибкую диафрагму, через которую выходной вал соединен с деталью сцепления,
- первый орган создания крутящего момента содержит по меньшей мере один электрический двигатель,
- первичный канал содержит редуктор, через который электрический двигатель действует крутящим моментом на выходной вал,
- второй орган создания крутящего момента является фрикционной системой,
- фрикционная система содержит барабан и трос в контакте с барабаном, при этом второй крутящий момент создается за счет трения между тросом и барабаном, когда барабан приводится во вращение относительно троса,
- трос закреплен на картере, и барабан установлен с возможностью вращения относительно картера,
- второй орган создания крутящего момента содержит упругий элемент, соединяющий трос с картером,
- устройство содержит по меньшей мере один датчик положения, выполненный с возможностью измерения углового положения выходного вала, и электронный блок управления, выполненный с возможностью управления первым органом создания крутящего момента в зависимости от измеренного углового положения,
- ручка управления полетом является ручкой управления общим шагом винта вертолета.
Краткое описание чертежей
Другие отличительные признаки и преимущества будут более очевидны из нижеследующего описания, представленного в качестве неограничивающего примера со ссылками на прилагаемые чертежи.
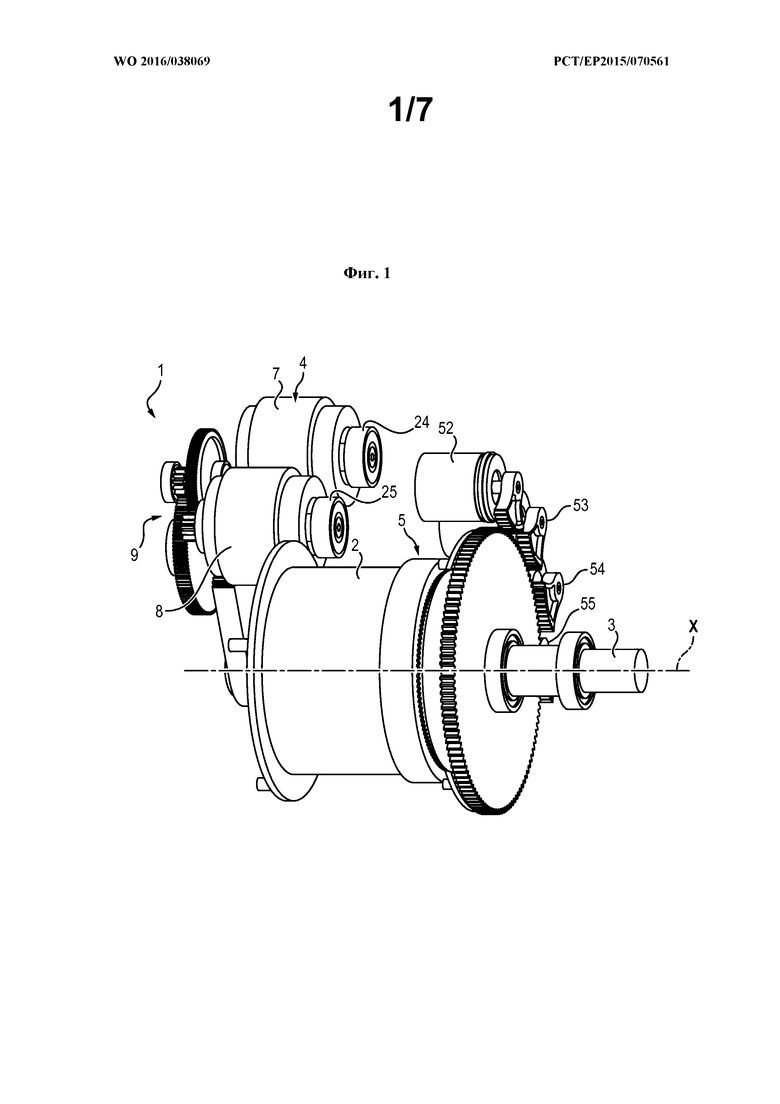
На фиг. 1 схематично показано устройство ручки управления полетом согласно варианту осуществления изобретения, вид в перспективе;
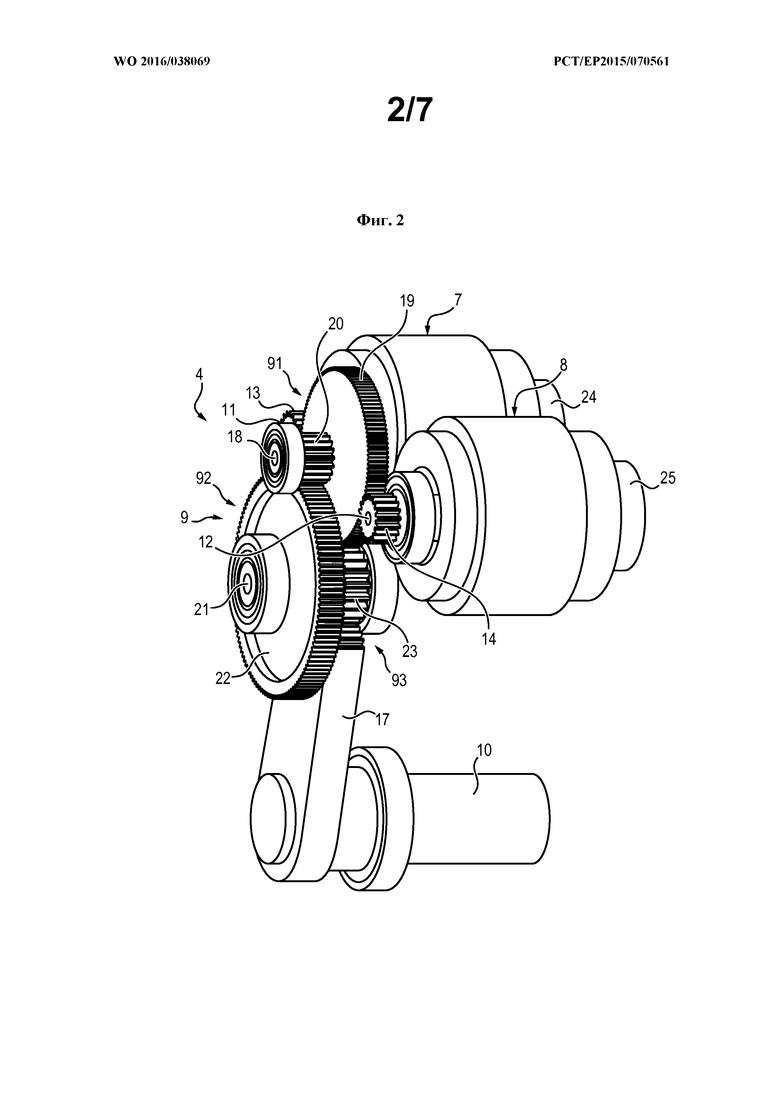
на фиг. 2 схематично показаны компоненты первичного канала устройства, вид в перспективе;
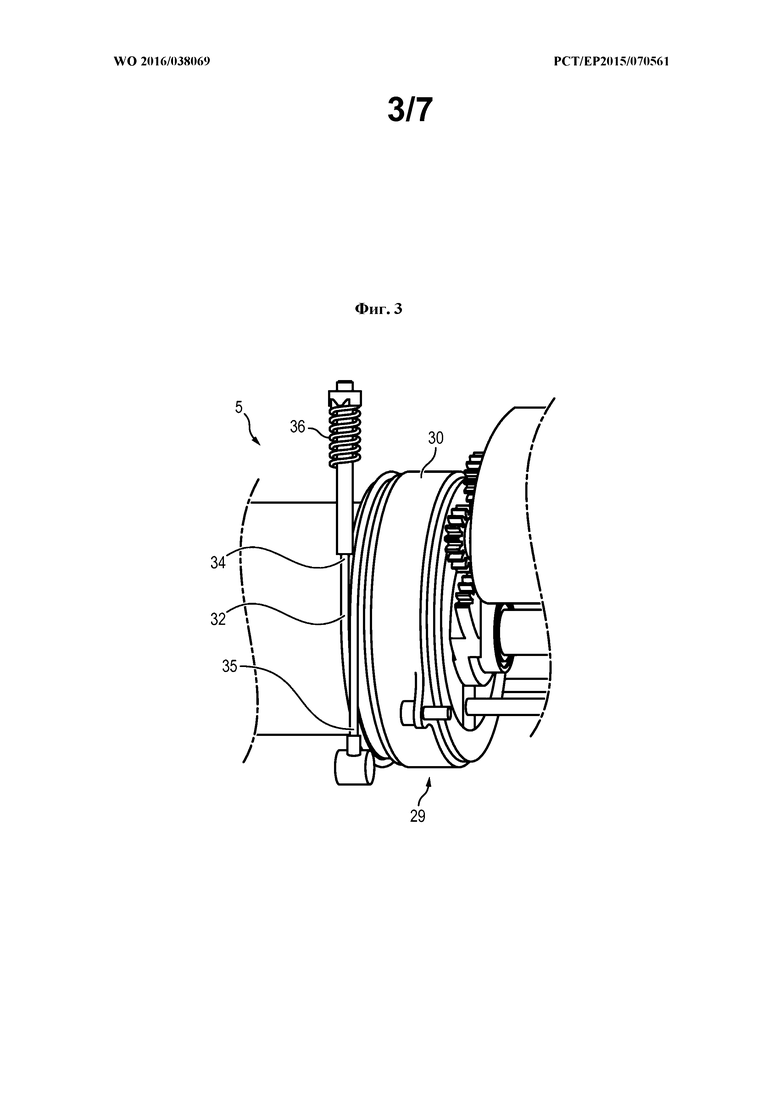
на фиг. 3 схематично показаны компоненты вторичного канала устройства, вид в перспективе;
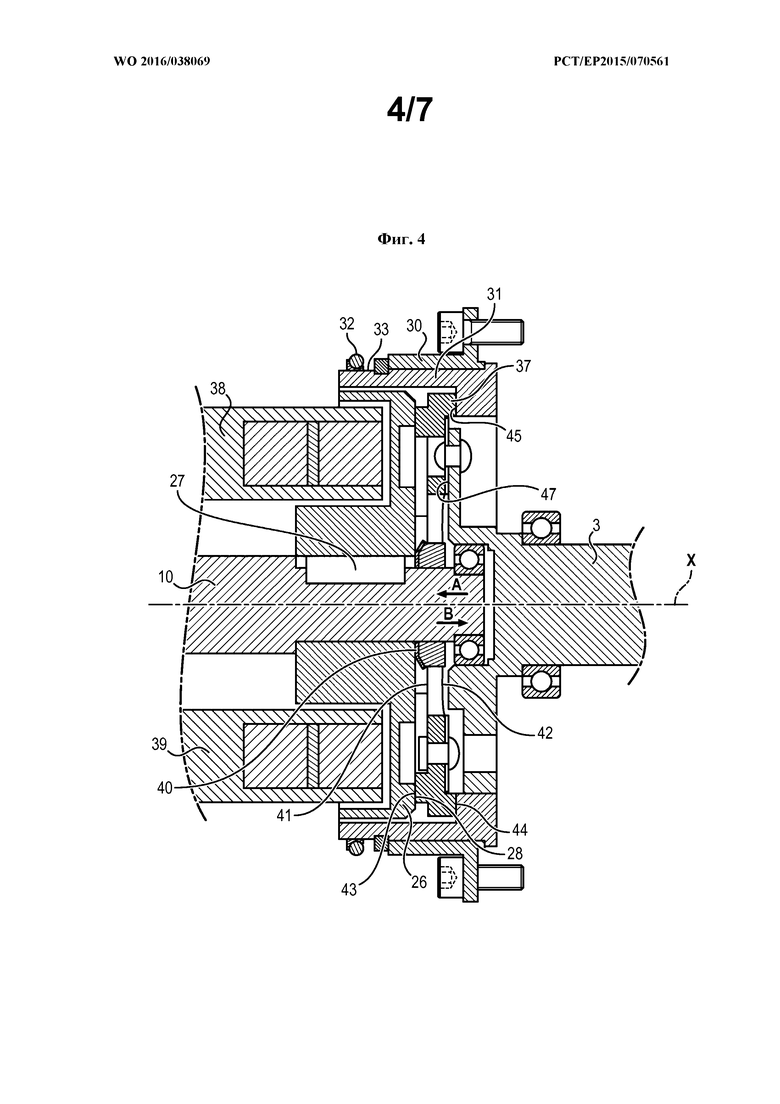
на фиг. 4 схематично показано сцепление устройства, вид в разрезе;
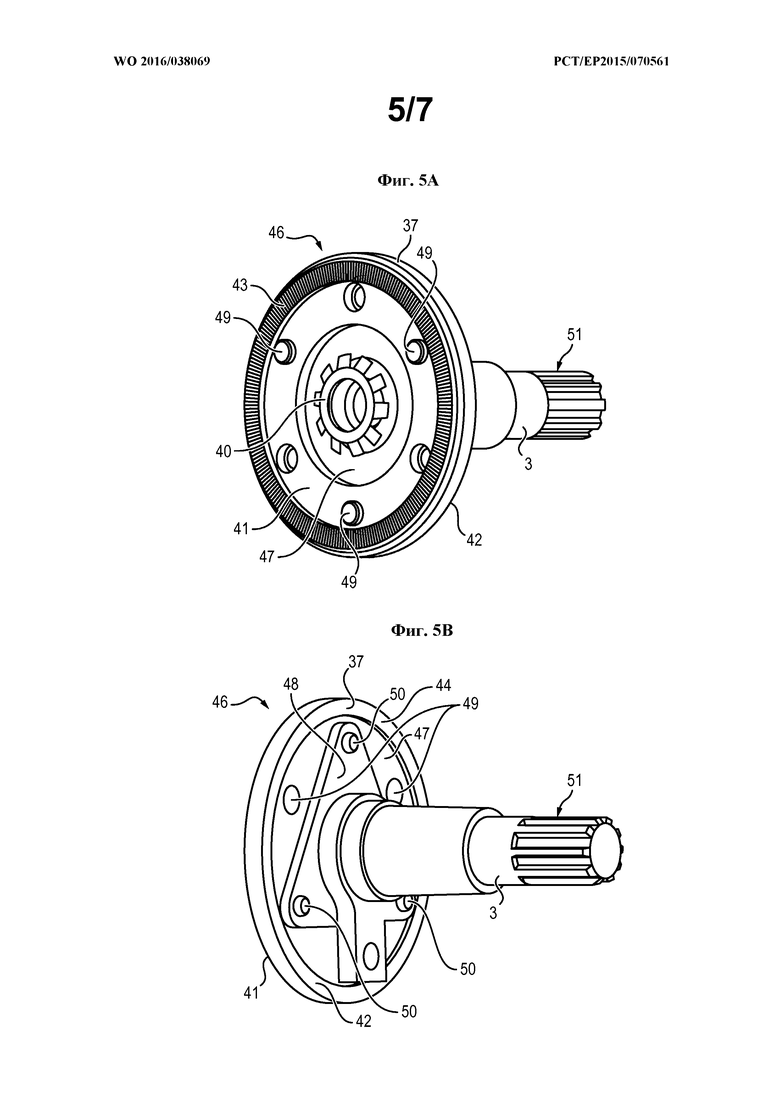
на фиг. 5А и 5В схематично показаны компоненты сцепления, виды в перспективе;
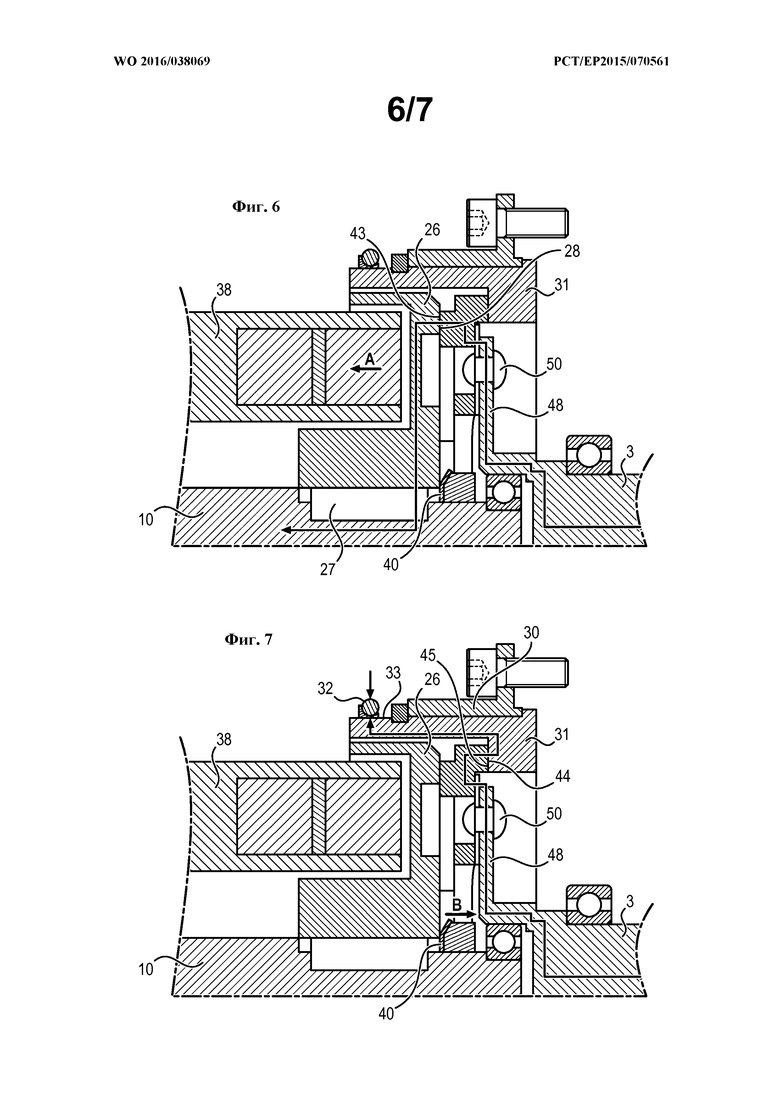
на фиг. 6 показан путь прохождения усилия через сцепление, когда активирован первичный канал;
на фиг. 7 показан путь прохождения усилия через сцепление, когда активирован вторичный канал;
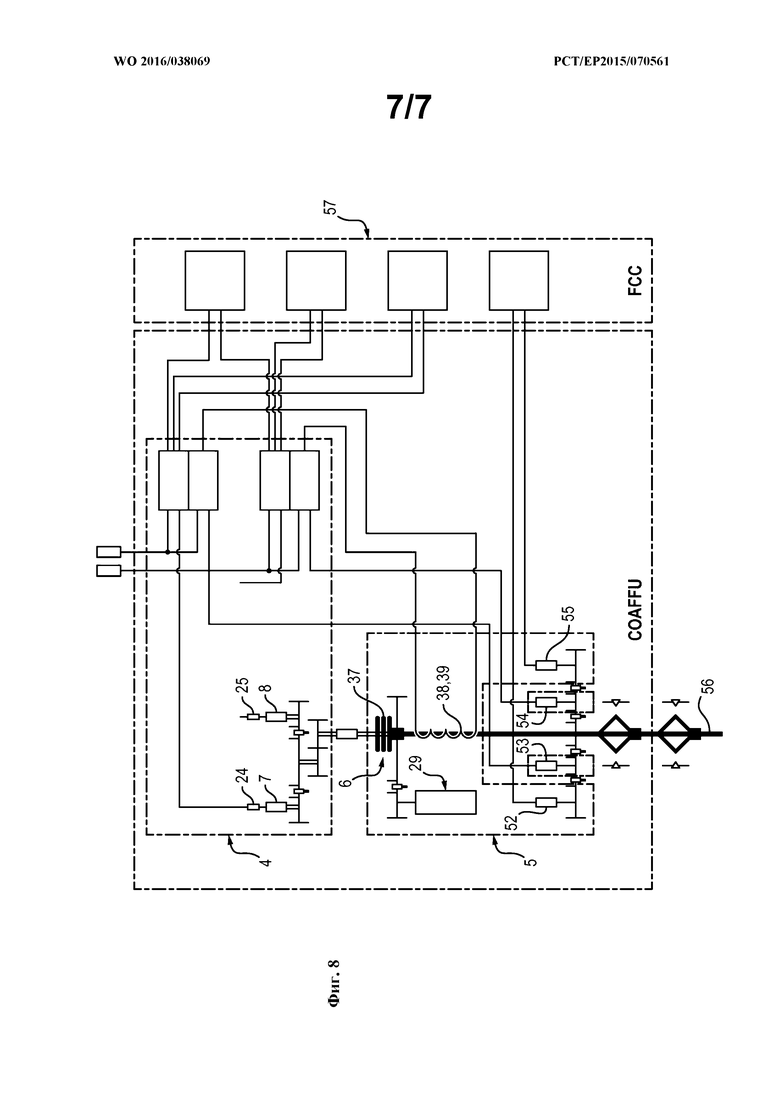
на фиг. 8 представлена схема различных приводных элементов устройства.
Осуществление изобретения
Показанное на фиг. 1 устройство является устройством привода ручки управления, например, такой как ручка управления общим шагом винта вертолета.
Устройство 1 содержит картер 2 и выходной вал 3, установленный с возможностью вращения относительно картера вокруг оси вращения Х. Картер 2 предназначен для крепления на конструкции вертолета, например, такой как пол кабины. Выходной вал 3 выполнен с возможностью соединения с ручкой управления общим шагом винта вертолета. Ручка общего шага предназначена для приведения в действие пилотом с целью управления общим шагом лопастей несущего винта вертолета.
Ручка общего шага неподвижно соединена во вращении с выходным валом 3 таким образом, чтобы вращение ручки приводило к такому же вращению выходного вала 3 вокруг оси Х.
Устройство 1 содержит систему возвратного усилия, позволяющую прикладывать к ручке противодействующую силу в зависимости от перемещения, сообщаемого ручке пилотом.
Система возвратного усилия содержит первичный канал 4 (или главный канал), вторичный канал 5 (или резервный канал) и сцепление 6, выполненное с возможностью выборочного соединения первичного канала 4 и вторичного канала 5 с выходным валом 3.
Первичный канал 4 более детально показан на фиг. 2. Первичный канал 4 содержит первый электрический двигатель 7, второй электрический двигатель 8, установленный параллельно с первым электрическим двигателем 7, редуктор 9 и выходной вал 10.
Первый электрический двигатель 7 содержит статор, установленный неподвижно относительно картера 2, подвижный ротор, выполненный с возможностью вращения относительно статора, и выходной вал 11, неподвижно соединенный с ротором.
Точно так же, второй электрический двигатель 8 содержит статор, установленный неподвижно относительно картера, подвижный ротор, выполненный с возможностью вращения относительно статора, и выходной вал 12, неподвижно соединенный с ротором.
Редуктор 9 является трехступенчатым редуктором. Редуктор 9 содержит первую ступень 91, вторую ступень 92 и третью ступень 93.
Первая ступень 91 редуктора содержит первую входную шестерню 13, вторую входную шестерню 14, первый промежуточный вал 18, установленный с возможностью вращения относительно картера 2, и первую промежуточную шестерню 19.
Первая входная шестерня 13 неподвижно соединена во вращении с выходным валом первого двигателя 7. Вторая входная шестерня 14 неподвижно соединена во вращении с выходным валом второго двигателя 8. Первая промежуточная шестерня 19 неподвижно соединена во вращении с первым промежуточным валом 18.
Вторая ступень 92 редуктора содержит вторую промежуточную шестерню 20, второй промежуточный вал 21, установленный с возможностью вращения относительно картера 2, и третью промежуточную шестерню 22.
Вторая промежуточная шестерня 20 неподвижно соединена во вращении с первым промежуточным валом 18. Третья промежуточная шестерня 22 неподвижно соединена во вращении со вторым промежуточным валом 21.
Третья ступень 93 редуктора содержит четвертую промежуточную шестерню 23 и выходную шестерню 17.
Четвертая промежуточная шестерня 23 неподвижно соединена во вращении со вторым промежуточным валом 21. Выходная шестерня 17 неподвижно соединена с выходным валом 10.
Ступени 91-93 расположены таким образом, что первая и вторая входные шестерни 13 и 14 зацепляются, обе, с первой промежуточной шестерней 19, вторая промежуточная шестерня 20 зацепляется с третьей промежуточной шестерней 22, и четвертая промежуточная шестерня 23 зацепляется с выходной шестерней 17.
Таким образом, оба электрических двигателя 7 и 8 одновременно приводят во вращение первую промежуточную шестерню 19 через две входные шестерни 13 и 14. Вращение первой промежуточной шестерни 19 передается на выходную шестерню 17 через три ступени 91-93 понижения. Выходная шестерня 17 приводит во вращение выходной вал 10 первичного канала.
Обе входные шестерни 13 и 14 являются идентичными. Первая промежуточная шестерня 19 имеет диаметр, превышающий диаметр входных шестерен 13 и 14. Точно так же, третья промежуточная шестерня 22 имеет диаметр, превышающий диаметр второй промежуточной шестерни 20. Наконец, выходная шестерня 17 имеет диаметр, превышающий диаметр четвертой промежуточной шестерни 23. Таким образом, скорость вращения выходного вала 10 значительно ниже скорости вращения выходных валов двигателей 7 и 8. Например, передаточное отношение приблизительно равно 120.
Кроме того, первичный канал 4 содержит первый датчик 24 положения и второй датчик 25 положения.
Первый датчик 24 положения выполнен с возможностью измерения углового положения ротора первого электрического двигателя 7. Например, первый датчик 24 положения является инкрементальным преобразователем, содержащим поворотный диск, неподвижно соединенный во вращении с ротором первого электрического двигателя 7. Первый датчик 24 положения выполнен с возможностью генерирования первого сигнала положения, характеризующего угловое положение ротора относительно статора. Этот первый сигнал передается в электронный блок управления.
Точно так же, второй датчик 25 положения выполнен с возможностью измерения углового положения ротора второго электрического двигателя 8. Например, второй датчик 25 положения является инкрементальным преобразователем, содержащим поворотный диск, неподвижно соединенный во вращении с ротором второго электрического двигателя 8. Второй датчик 25 положения выполнен с возможностью генерирования второго сигнала положения, характеризующего угловое положение ротора относительно статора. Этот второй сигнал передается в электронный блок управления.
В случае неисправности или отказа одного из электрических двигателей 7 и 8 другой двигатель может самостоятельно приводить во вращение первую промежуточную шестерню 19 без помощи неисправного двигателя.
Первичный канал 4 содержит также диск 26 (показан на фиг. 4), при этом диск 26 неподвижно соединен во вращении с выходным валом 10 при помощи шпонки 27. Диск 26 имеет периферический зубчатый венец 28.
Вторичный канал 5 более детально показан на фиг. 3 и 4. Вторичный канал 5 содержит фрикционную систему 29.
Фрикционная система 29 содержит кольцо 30, неподвижно установленное на картере 2, барабан 31, установленный с возможностью вращения относительно картера 2 вокруг оси Х, и трос 32 в контакте с барабаном 31.
Кольцо 30 окружает барабан 31, направляя барабан 31 при вращении.
Барабан 31 имеет наружную цилиндрическую поверхность 33 вращения, образующую фрикционную поверхность.
Трос 32 окружает барабан 31. В частности, трос 32 намотан на фрикционную поверхность 33 барабана 31. Трос 32 имеет первый конец 34, закрепленный на картере 2, и второй конец 35, тоже закрепленный на картере 2.
Фрикционная система 29 содержит упругий элемент 36, при помощи которого первый конец 34 троса 32 закреплен на картере 2. Упругий элемент 36 является, например, пружиной растяжения, выполненной с возможностью удержания троса 32 натянутым вокруг барабана 31.
Трос 32 намотан вокруг барабана 31 таким образом, что, когда барабан 31 приводится во вращение относительно картера 2, фрикционная поверхность 33 барабана 31 трется по тросу 32, создавая таким образом момент трения, противодействующий вращению барабана 31.
Сцепление 6 показано на фиг. 4. Сцепление 6 содержит деталь 37 сцепления, два электромагнита 38, 39 и упругий возвратный орган 40.
Деталь 37 сцепления имеет форму диска. Деталь 37 сцепления выполнена с возможностью поступательного перемещения относительно картера 2 в направлении, параллельном оси Х.
В частности, деталь 37 сцепления может перемещаться между первым положением, в котором деталь сцепления взаимодействует с диском 26 первичного канала 4, и вторым положением, в котором деталь сцепления взаимодействует с барабаном 31 вторичного канала 5.
Для этого деталь 37 сцепления имеет первую сторону 41 и вторую сторону 42, противоположную первой стороне 41. Первая сторона 41 детали 37 сцепления имеет зубья 43, выполненные с возможностью зацепления с зубьями 28 диска 26 первичного канала 4. Вторая сторона 42 детали 37 сцепления имеет фрикционную поверхность 44, выполненную с возможностью взаимодействия с фрикционной поверхностью 45 барабана 31 вторичного канала 5.
Электромагниты 38 и 39 расположены таким образом, что при активации они создают магнитное поле, действующее на деталь 37 сцепления в направлении первого положения.
Упругий возвратный орган 40 действует, в свою очередь, на деталь 37 сцепления в направлении второго положения. Например, упругий возвратный орган 40 является пружиной, расположенной между деталью 37 сцепления и диском 26 первичного канала 4.
Кроме того, устройство 1 содержит соединительную систему 46, соединяющую выходной вал 3 устройства с деталью 37 сцепления. Соединительная система 46 более детально показана на фиг. 5А и 5В. Соединительная система 46 позволяет соединять во вращении деталь 37 сцепления и выходной вал 3 и одновременно обеспечивает поступательное перемещение детали относительно выходного вала 3.
Соединительная система 46 содержит гибкую диафрагму 47, расположенную между деталью 37 сцепления и выходным валом 3, соединительную деталь 48, неподвижно соединенную с выходным валом 3, и множество крепежных элементов 49 и 50.
Крепежные элементы включают в себя первые крепежные элементы 49 для крепления гибкой диафрагмы 47 на детали 37 сцепления и вторые крепежные элементы 50 для крепления соединительной детали 48 на гибкой диафрагме 47.
В примере, представленном на фиг. 5А и 5В, гибкая диафрагма 47 имеет форму диска, и крепежные элементы 49, 50 расположены на периферии диска. Первые крепежные элементы 49 расположены между вторыми крепежными элементами 50.
Кроме того, соединительная деталь 48 имеет по существу треугольную форму. Вторые крепежные элемента 50 расположены в углах треугольника.
За счет своей гибкости диафрагма 47 обеспечивает поступательное перемещение детали 37 сцепления относительно выходного вала 3 параллельно оси Х.
Выходной вал 3 имеет продольные шлицы 51, проходящие параллельно оси Х. Продольные шлицы 51 выполнены с возможностью взаимодействия с соответствующими шлицами ручки управления для соединения во вращении выходного вала 3 и ручки управления.
Устройство 1 содержит также четыре датчика 52-55 положения, показанные на фиг.1, выполненные с возможностью измерения углового положения выходного вала 3.
Каждый датчик 52-55 положения выполнен с возможностью генерирования сигнала измерения, характеризующего угловое положение ручки. Сигналы, генерируемые датчиками 52-55, передаются в электронный блок управления.
При нормальной работе деталь 37 сцепления изначально находится во втором положении.
При включении устройства 1 электромагниты 38 и 39 получают питание таким образом, что действуют на деталь 37 сцепления в направлении первого положения. Поле, создаваемое электромагнитами 38 и 39, является достаточным, чтобы преодолевать возвратную силу, которой действует возвратный орган 40 на деталь 37 сцепления.
Деталь 37 сцепления перемещается из второго положения в первое положение (стрелка А).
Деталь 37 сцепления взаимодействует с диском 26 первичного канала 4 (фиг. 6). В этой конфигурации первичный канал 4 создает возвратное усилие, действующее на ручку управления.
Электронный блок управления управляет двигателями 7 и 8 в зависимости от сигналов измерения, которые он получает от датчиков 52-55 положения, и от параметров полета.
Каждый двигатель 7, 8 создает момент реакции, который передается на ручку через редуктор 9 и сцепление 6.
В частности, деталь 37 сцепления передает момент реакции, создаваемый двигателями 7, 8, на выходной вал 3 устройства 1 через гибкую диафрагму 47.
В случае отказа одного из двигателей 7 или 8 другой двигатель может создавать необходимый реактивный момент без помощи неисправного двигателя.
Кроме того, в случае отказа одного из двигателей 7 и 8, электронного блока управления или в случае отключения электрического питания деталь 37 сцепления автоматически возвращается из первого положения во второе положение (фиг. 7).
В этой конфигурации электромагниты 38 и 39 не получают питания, поэтому больше не действуют на деталь 37 сцепления в направлении первого положения.
Деталь 37 сцепления перемещается из первого положения во второе положение (стрелка В) под действием возвратной силы, прикладываемой возвратным органом 40 к детали 37 сцепления. Деталь 37 сцепления зацепляется с барабаном 31 вторичного канала.
Возвратное усилие, действующее на ручку управления, создается вторичным каналом 5.
Момент, которым пилот действует на ручку, передается на барабан 31 через выходной вал 3 и сцепление 6. Перемещение ручки приводит к вращению барабана 31 относительно троса 32. Перемещение барабана 31 относительно троса 32 создает трение между барабаном 31 и тросом 32, в результате чего появляется момент, противодействующий моменту, которым пилот действует на ручку.
Таким образом, в случае неисправности или заклинивания компонента первичного канала 4 сцепление 6 позволяет соединить вторичный канал 5 с выходным валом 3 устройства 1. Вторичный канал 5 работает вместо первичного канала 4.
Кроме того, вторичный канал 5 не требует для своей работы питания электрической энергией.
На фиг. 8 показана схема различных приводных элементов устройства 1.
Как показано на этой фигуре, ручка 56 управления выборочно соединяется с первичным каналом 4 и с вторичным каналом 5 через сцепление 6.
Сигналы измерения от датчиков 24, 25, 52-55 поступают в электронный блок 57 управления. Электронный блок управления управляет, с одной стороны, двигателями 7 и 8 и, с другой стороны, электромагнитами 38 и 39 в зависимости от получаемых им сигналов измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМОБИЛЬНАЯ МНОГОСТУПЕНЧАТАЯ КОРОБКА ПЕРЕДАЧ | 2012 |
|
RU2508486C1 |
| КОРОБКА ПЕРЕДАЧ И МЕХАНИЗИРОВАННОЕ СЕЛЬСКОХОЗЯЙСТВЕННОЕ УСТРОЙСТВО | 2011 |
|
RU2561157C2 |
| ВЫСОКОПРОИЗВОДИТЕЛЬНАЯ ПРОМЫШЛЕННАЯ ТРАНСМИССИЯ | 2017 |
|
RU2748925C2 |
| РОТОРНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1995 |
|
RU2083850C1 |
| Трансмиссия транспортного средства | 1986 |
|
SU1342758A1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| КОРОБКА ПЕРЕДАЧ | 2010 |
|
RU2556403C2 |
| ТРАНСМИССИЯ ПЛАВАЮЩЕГО ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2243109C2 |
| КОРОБКА ПЕРЕДАЧ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2011 |
|
RU2472995C1 |
| КОРОБКА ПЕРЕДАЧ С НЕСКОЛЬКИМИ СЦЕПЛЕНИЯМИ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2529113C2 |
Изобретение относится к устройству ручки управления полетом летательного аппарата. Например, устройство является устройством ручки управления общим шагом винта вертолета. Устройство содержит картер, выходной вал, предназначенный для соединения с ручкой управления полетом и установленный с возможностью вращения относительно картера, первичный и вторичный каналы и сцепление. Каналы содержат первый и второй органы создания крутящих моментов, соответственно, выполненные с возможностью действия на выходной вал крутящими моментами. Сцепление выполнено с возможностью выборочного соединения первичного и вторичного каналов с выходным валом. Повышается надежность при использовании. 15 з.п. ф-лы, 9 ил.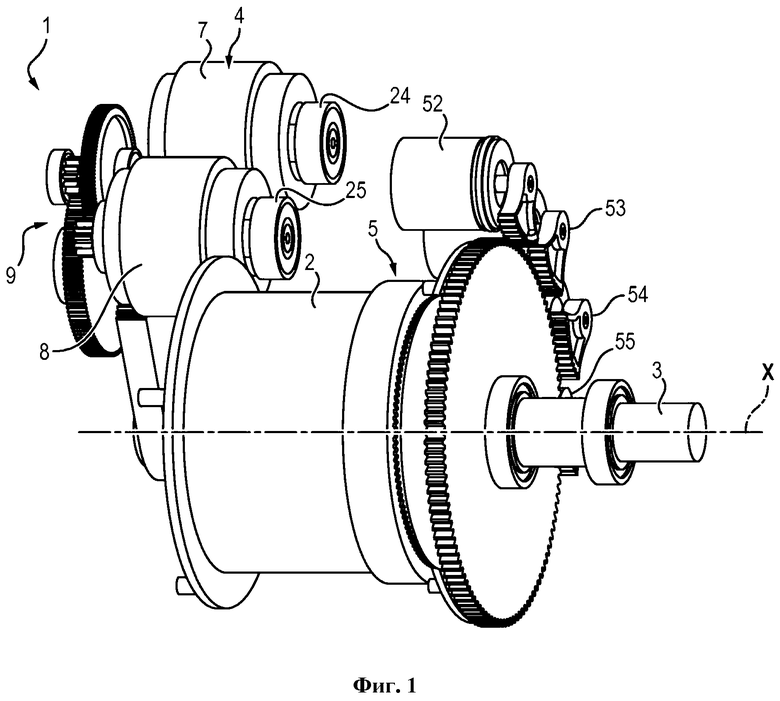
1. Устройство (1) ручки управления полетом летательного аппарата, содержащее:
- картер (2), предназначенный для крепления на конструкции летательного аппарата,
- выходной вал (3), предназначенный для соединения с ручкой (56) управления полетом, при этом выходной вал (3) установлен с возможностью вращения относительно картера (2),
- первичный канал (4), содержащий первый орган (7, 8) создания крутящего момента, выполненный с возможностью действия на выходной вал (3) первым крутящим моментом,
- вторичный канал (5), содержащий второй орган (29) создания крутящего момента, выполненный с возможностью действия на выходной (3) вал вторым крутящим моментом, и
- сцепление (6), выполненное с возможностью выборочного соединения первичного канала (4) и вторичного канала (5) с выходным валом (3).
2. Устройство по п. 1, в котором сцепление (6) содержит деталь (37) сцепления, подвижную относительно картера (2) и выполненную с возможностью перемещения между первым положением, в котором деталь (37) сцепления взаимодействует с первичным каналом (4), и вторым положением, в котором деталь (37) сцепления взаимодействует с вторичным каналом (5).
3. Устройство по п. 2, в котором сцепление (6) содержит электромагнит (38, 39), выполненный с возможностью при получении питания действовать на деталь (37) сцепления в направлении первого положения.
4. Устройство по одному из пп. 2 или 3, в котором сцепление (6) содержит упругий возвратный орган (40), выполненный с возможностью воздействия на деталь (37) сцепления в направлении второго положения.
5. Устройство по одному из пп. 2–4, в котором деталь (37) сцепления выполнена с возможностью поступательного перемещения относительно картера (2).
6. Устройство по п. 5, в котором выходной вал (3) выполнен с возможностью вращения относительно картера (2) вокруг оси вращения (Х), и деталь (37) сцепления выполнена с возможностью поступательного перемещения относительно картера (2) параллельно оси вращения (Х) выходного вала (3).
7. Устройство по одному из пп. 2–6, в котором деталь (37) сцепления неподвижно соединена во вращении с выходным валом (3) с сохранением при этом возможности поступательного перемещения относительно выходного вала (3).
8. Устройство по одному из пп. 2–7, содержащее гибкую диафрагму (47), посредством которой выходной вал (3) соединен с деталью (37) сцепления.
9. Устройство по одному из пп. 1–8, в котором первый орган (7, 8) создания крутящего момента содержит по меньшей мере один электрический двигатель.
10. Устройство по п. 9, в котором первичный канал (4) содержит редуктор (9), через который электрический двигатель (7, 8) действует крутящим моментом на выходной вал (3).
11. Устройство по одному из пп. 1–10, в котором второй орган (29) создания крутящего момента является фрикционной системой.
12. Устройство по п. 11, в котором фрикционная система (29) содержит барабан (31) и трос (32) в контакте с барабаном (31), при этом второй крутящий момент создается за счет трения между тросом (32) и барабаном (31), когда барабан (31) приводится во вращение относительно троса (32).
13. Устройство по п. 12, в котором трос (32) закреплен на картере (2) и барабан (31) установлен с возможностью вращения относительно картера (2).
14. Устройство по одному из пп. 12 или 13, в котором второй орган (29) создания крутящего момента содержит упругий элемент (36), соединяющий трос (32) с картером (2).
15. Устройство по одному из пп. 1–14, содержащее по меньшей мере один датчик (52-55) положения, выполненный с возможностью измерения углового положения выходного вала (3), и электронный блок (57) управления, выполненный с возможностью управления первым органом (7, 8) создания крутящего момента в зависимости от измеренного углового положения.
16. Устройство по одному из пп. 1–15, в котором ручка (57) управления полетом является ручкой управления общим шагом винта вертолета.
| СПОСОБ ТЕРМИЧЕСКОЙ ОБРАБОТКИ АНИЗОТРОПНОЙ ЭЛЕКТРОТЕХНИЧЕСКОЙ СТАЛИ | 1990 |
|
RU2022034C1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| 0 |
|
SU125963A1 |

