Изобретение относится к области космической техники, а именно, к эксплуатации космических аппаратов (КА) и может быть использовано при управлении снабженных солнечными батареями (СБ) К А в полете.
При управлении КА, снабженного СБ, необходимо обеспечивать требуемую ориентацию СБ на Солнце (Елисеев А.С.Техника космических полетов. - М.: Машиностроение, 1983), для чего разворачивают панели СБ в рабочее положение, соответствующее совмещению нормали к их освещенной рабочей поверхности с направлением на Солнце.
Также известен способ управления КА с СБ (патент РФ №2340518 по заявке №2006118382/11, приоритет от 26.05.2006), в котором СБ поворачивают путем отворота нормали к освещенной рабочей поверхности СБ от направления на Солнце в сторону направления радиус-вектора КА до достижения углом между нормалью к освещенной рабочей поверхности СБ и направлением на Солнце значения, соответствующего положению СБ, при котором ток, вырабатываемый СБ под воздействием прямого солнечного излучения, поступающего на рабочую поверхность СБ, и отраженного от Земли излучения, поступающего на тыльную поверхность СБ, достигает максимально-возможного в текущей точке орбиты КА значения. Данный способ обеспечивает повышение эффективности генерации тока СБ за счет учета поступления на СБ как прямого солнечного излучения, так и излучения от Земли (обеспечивается увеличение прихода электроэнергии от СБ, имеющих положительную выходную мощность тыльной поверхности, за счет дополнительного использования отраженного от Земли солнечного излучения, поступающего на тыльную поверхность панелей СБ).
С другой стороны, одной из составляющей управления КА, снабженного СБ, является контроль основных электрических характеристик СБ: выходного (генерируемого) тока, напряжения и мощности СБ (Раушенбах Г. Справочник по проектированию солнечных батарей. М.: Энергоатомиздат, 1983; патент РФ №2353555 по заявке №2006131395/11, приоритет от 31.08.2006), для чего разворачивают панели СБ в рабочее положение, соответствующее совмещению нормали к их освещенной рабочей поверхности с направлением на Солнце и осуществляют контроль текущей производительности панели СБ по величине генерируемого тока. Данный способ обеспечивает контроль основных электрических характеристик СБ в ходе полета КА, при этом к недостаткам данного способа управления КА с СБ можно отнести то, что он не позволяет уменьшить (исключить) поступление уходящего от Земли излучения на тыльную поверхность СБ, что оказывает неблагоприятное влияние на решение задачи определения выходной мощности и последующей оценки эффективности СБ.
Известен способ управления КА с СБ при определения выходной мощности СБ (патент РФ №2621816 по заявке №2016107256, приоритет от 29.02.2016 - прототип), в котором СБ КА разворачивают в положение, при котором уходящее от Земли излучение поступает на СБ вне зон чувствительности рабочей и тыльной поверхностей СБ. Способ - прототип позволяет увеличить точность определения выходной мощности и оценки текущей эффективности СБ КА за счет минимизации (исключения) влияния уходящего от Земли излучения при определении выходной мощности и оценки текущей эффективности СБ.
Для реализации способа - прототипа необходимо специальным образом ориентировать СБ и КА, что, в общем случае, может не самым лучшим образом соответствовать решению других целевых задач выполняемых полетных операций КА. В том числе, в процессе полета КА могут решаться такие целевые задачи полетных операций, как «выход» космонавтов в открытый космос - внекорабельная деятельность (ВКД) экипажа КА, операции по внешнему визуальному осмотру КА с другого КА, совершающего его облет, и т.д. Для данного типа операций необходимо, чтобы задаваемые зоны на внешней поверхности КА (зоны, в которых находится и осуществляет свою деятельность экипаж в процесс ВКД, или зоны на поверхности КА, представляющие наибольший интерес для выполнения их внешнего визуального осмотра с некоторого другого КА) были необходимым/достаточным образом освещены.
Таким образом, к недостаткам способа - прототипа относится, в том числе, то, что он не предусматривает возможности обеспечения необходимого/достаточного уровня освещения требуемых/задаваемых зон на внешней поверхности КА.
Задачей, на решение которой направлено настоящее изобретение, является обеспечение освещения задаваемых участков (зон) на внешней поверхности КА.
Технический результат, достигаемый при осуществлении настоящего изобретения, заключается в расширении возможностей по обеспечению требуемого освещения зон на внешней поверхности КА, снабженного подвижными СБ, путем дополнительной подсветки зон на внешней поверхности КА солнечным световым излучением, отраженным от поверхности панелей СБ. В данном случае используется свойство СБ, как системы из плоских оптических элементов, обладающих полированной поверхностью и способных отражать свет, в частности, в соответствии с зеркальным эффектом (равенство углов падения и отражения).
Технический результат достигается тем, что в способе управления снабженным солнечными батареями космическим аппаратом, включающем повороты космического аппарата для построения и поддержания задаваемой ориентации космического аппарата и поворот солнечных батарей относительно космического аппарата для наведения нормали к рабочей поверхности солнечных батарей на Солнце, в отличие от прототипа, измеряют угловое положение космического аппарата относительно инерциального пространства, измеряют ток нагрузки от потребителей электроэнергии на космическом аппарате Iн и осуществляют поворот солнечных батарей относительно космического аппарата при поддержании измеряемого значения угла между вектором направления на Солнце и вектором нормали к рабочей поверхности солнечных батарей в диапазоне  где Imax - максимальный ток, вырабатываемый при ориентации рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам, до достижения задаваемого уровня освещенности затененного от Солнца участка поверхности космического аппарата, в котором наблюдают дефицит освещения, отраженным от поверхности солнечных батарей солнечным световым излучением, по завершению последнего поворота солнечных батарей запоминают измеренное угловое положение космического аппарата относительно инерциального пространства и далее при отклонении текущего измеренного углового положения космического аппарата от последнего запомненного углового положения космического аппарата, превышающем задаваемую величину, повторяют предшествующий поворот солнечных батарей.
где Imax - максимальный ток, вырабатываемый при ориентации рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам, до достижения задаваемого уровня освещенности затененного от Солнца участка поверхности космического аппарата, в котором наблюдают дефицит освещения, отраженным от поверхности солнечных батарей солнечным световым излучением, по завершению последнего поворота солнечных батарей запоминают измеренное угловое положение космического аппарата относительно инерциального пространства и далее при отклонении текущего измеренного углового положения космического аппарата от последнего запомненного углового положения космического аппарата, превышающем задаваемую величину, повторяют предшествующий поворот солнечных батарей.
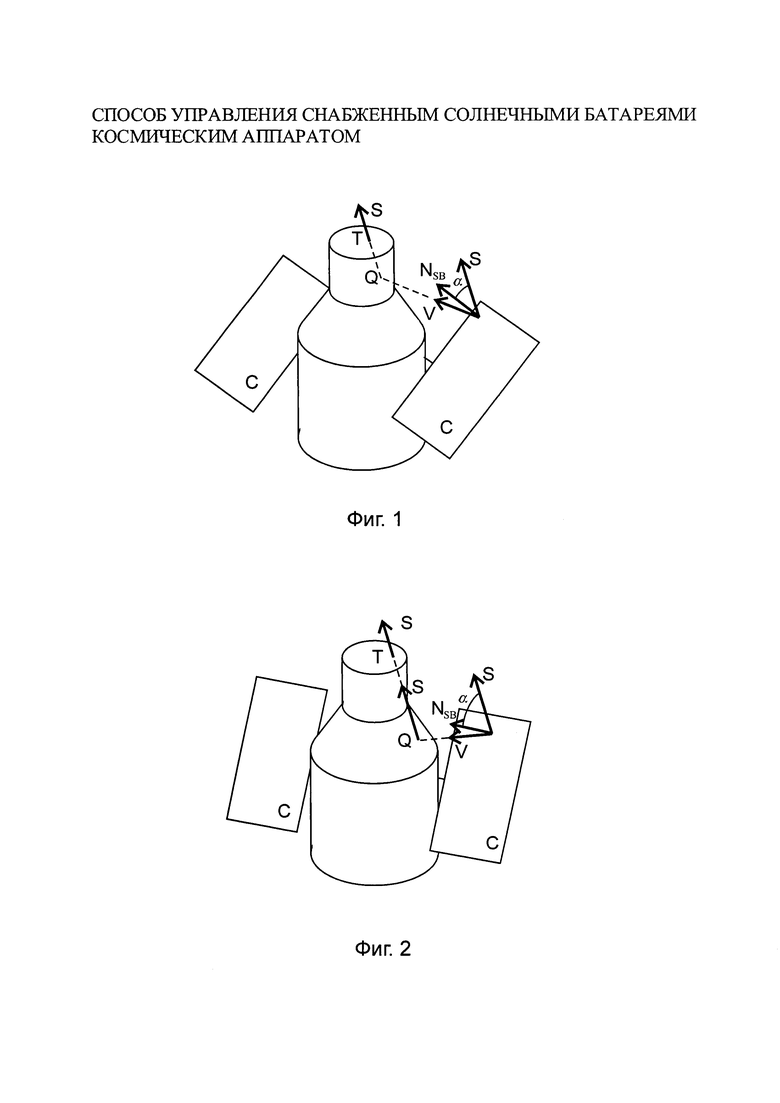
Суть предлагаемого изобретения поясняется на фиг. 1 и 2, на которых представлены примеры возможных схем поступления отраженного от СБ солнечного светового излучения в затененную от Солнца элементами конструкции КА зону поверхности КА, в которой наблюдают дефицит освещения, для двух вариантов расположения указанной зоны на поверхности КА. На фиг. 1 указанная зона затенена элементом конструкции КА, на котором она непосредственно расположена. На фиг. 2 указанная зона затенена другим элементом конструкции КА.
На фиг. 1 и 2 введены обозначения:
S- вектор направления на Солнце;
Q - затененный от Солнца элементами конструкции КА участок (зона) поверхности КА, в которой наблюдают дефицит освещения;
Т - участок элемента конструкции КА, затеняющий от Солнца участок Q поверхности КА;
С - СБ КА;
V - направление потока отраженного от поверхности СБ солнечного излучения на затененный от Солнца элементами конструкции КА участок (зону) поверхности КА, в котором наблюдают дефицит освещения;
Nsb - вектор нормали к рабочей поверхности СБ,
α - угол между вектором направления на Солнце и вектором нормали к рабочей поверхности СБ.
Поясним предложенные в способе действия.
Как правило для выполнения полетных операций предусмотрены различные режимы управления ориентаций СБ КА, в том числе режим автоматического наведения СБ на Солнце (режим «отслеживания» Солнца) и режим выставки СБ в заданное положение.
В предлагаемом техническом решении для решения поставленной задачи выполняют повороты КА для построения и поддержания задаваемой ориентации КА и поворот СБ относительно КА для наведения нормали к рабочей поверхности СБ на Солнце.
В качестве задаваемой ориентации КА может выступать некоторая «дежурная» ориентация КА.
Например, можно рассмотреть КА, в системе управления движением ориентацией которых в качестве основных исполнительных органов используются инерционные исполнительные органы - силовые гироскопы (СГ). В этом случае при выполнении разворотов и при поддержании ориентации КА происходит накопление кинетического момента (КМ) СГ и по достижении КМ заданных граничных значений выполняется операция «разгрузки» СГ - приведения КМ в допустимые пределы с помощью реактивных двигателей ориентации (ДО). При этом при выполнении разгрузки СГ требуется дополнительное рабочее тело (топливо) для работы ДО.
Для реализации полета таких КА, как правило, используются специальные режимы ориентации, обеспечивающие благоприятные условия для работы системы СГ - такие, чтобы максимально уменьшать эффект «насыщения» СГ и, тем самым, избегать или, по крайней мере, уменьшать необходимость их разгрузки (Бебенин Г.Г., Скребушевский Б.С, Соколов Г.А. Системы управления полетом космических аппаратов // М.: Машиностроение, 1978; Скребушевский Б.С. Управление полетом беспилотных космических аппаратов // М.: «Владмо», 2003). Одним из таких режимов ориентации является режим, при котором выполняют построение и поддержание в орбитальной системе координат ориентации КА, при которой суммарный внешний возмущающий момент - момент от воздействия на КА атмосферы и силы тяжести - за виток достигает минимального значения и обеспечивается минимальное накопление кинетического момента гиросистемы.
В предлагаемом техническом решении дополнительно на задаваемом интервале времени измеряют угловое положение КА относительно инерциального пространства, измеряют ток нагрузки от потребителей электроэнергии на КА Iн и осуществляют поворот СБ относительно КА при поддержании измеряемого значения угла а между вектором направления на Солнце и вектором нормали к рабочей поверхности СБ в диапазоне

где Imax - максимальный ток, вырабатываемый при ориентации рабочей поверхности панелей СБ перпендикулярно солнечным лучам,
до достижения задаваемого уровня (например, наибольшей) освещенности затененного от Солнца элементами конструкции КА участка поверхности КА, в котором наблюдают дефицит освещения, отраженным от поверхности СБ солнечным световым излучением (учитывая, что СБ может закрывать/перекрывать собой часть поверхности КА, - поворот СБ относительно КА могут осуществлять при поддержании значения угла α в диапазоне (1) до достижения наибольшей освещенности затененного от Солнца элементами конструкции КА участка поверхности КА, в котором наблюдают дефицит освещения, солнечным световым излучением, отраженным суммарно как от поверхности СБ, так и поверхности освещенных Солнцем элементов конструкции КА).
В качестве задаваемого интервала времени могут рассматриваться, например, интервалы времени выполнения ВКД экипажа КА, операций по внешнему визуальному осмотру КА с другого КА, совершающего его облет, и т.д.
По завершению последнего поворота СБ запоминают измеренное угловое положение КА относительно инерциального пространства.
Далее, в процессе поддержания задаваемой ориентации КА на рассматриваем интервале времени полета, сравнивают текущее измеренное угловое положение КА и последнее запомненное угловое положение КА и, при их отличии, определяют отклонение текущего измеренного углового положения КА от последнего запомненного углового положения КА.
В случае, если величина отклонения текущего измеренного углового положения КА от последнего запомненного углового положения КА превышает задаваемое значение, то повторяют последний поворот СБ. Величина указанного задаваемого значения данного отклонения определяется требованиями к точности задания/определения освещенности затененного от Солнца элементами конструкции КА участка поверхности КА, в котором наблюдают дефицит освещения, и зависимостью изменения указанной освещенности от изменения углового положения КА.
Поворот СБ в описанные положения обеспечивает поступление на затененный от Солнца элементами конструкции КА участок поверхности КА, в котором наблюдают дефицит освещения, задаваемого уровня (например, максимального) потока отраженного от поверхности СБ (и, при их учете, освещенных Солнцем элементов конструкции КА) солнечного светового излучения при выполнении условия, что солнечное излучение поступает на СБ при таких углах с нормалью к рабочей поверхности СБ, при которых воздействие солнечного излучения на СБ приводит к генерации необходимого тока СБ - тока, необходимого и достаточного для обеспечения энергией бортовых потребителей электроэнергии на КА.
В качестве иллюстрации предложенного способа на фиг. 1 и 2 показаны возможные схемы поступления в затененную от Солнца элементами конструкции КА зону поверхности КА, в которой наблюдают дефицит освещения, отраженного от СБ солнечного светового излучения. На рисунках участок Г лежит на линии направления на Солнце, построенной из участка Q.
Считаем, что СБ в системе энергоснабжения (СЭС) КА являются основными источниками электроэнергии и обеспечивают работу ее бортовых потребителей (Раушенбах Г. Справочник по проектированию солнечных батарей. Москва, Энергоатомиздат, 1983; Инженерный справочник по космической технике. Изд-во МО ССР, М., 1969).
Исходя из необходимой достаточности, для работы бортовых систем КА нагрузка от потребителей Iн не должна превышать текущую величину тока I. Поскольку текущая величина тока I от СБ определятся выражением (Грилихес В.А., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. Москва. «Наука», 1984, стр. 109)
I=Imax cosα,
где α - текущий угол между нормалью к рабочей поверхности СБ и направлением на Солнце,
то текущий угол α не должен превышать величину αmax рассчитываемую по формуле

Для моделирования интенсивности светового потока, поступающего на затененный от Солнца элементами конструкции КА участок поверхности КА, в котором наблюдают дефицит освещения, от поверхности СБ (и, при их учете, освещенных Солнцем элементов конструкции КА), например, может быть использована модель рассеянного/отраженного излучения, составленная из двух компонент - диффузной и зеркальной. Для расчета диффузной компоненты может быть применено Ламбертово приближение, для расчета зеркальной компоненты - закон Фонга (Роджерс Д. Алгоритмические основы машинной графики: Пер. с англ. - М.: Мир, 1989. - 512 с.). Параметрами указанной модели являются коэффициенты диффузного и зеркального отражения и коэффициент блеска и интенсивность поля рассеянного/отраженного излучения L определяется выражением:

где  - направление на Солнце,
- направление на Солнце,
 - нормаль к отражающей поверхности в точке (участке) отражения,
- нормаль к отражающей поверхности в точке (участке) отражения,
 - направление идеального (зеркального) отражения,
- направление идеального (зеркального) отражения,
 - направление от точки (участка) отражения на затененный от
- направление от точки (участка) отражения на затененный от
Солнца элементами конструкции КА участок поверхности КА, в котором наблюдают дефицит освещения,
Kd, Km - коэффициенты диффузного и зеркального отражения в точке (участке) отражения,
γ - коэффициент резкости бликов зеркальной компоненты,
В - внеатмосферная интенсивность солнечной радиации.
При этом максимальная интенсивность отраженного светового излучения от СБ, как системы из плоских оптических элементов, обладающих полированной поверхностью и способных отражать свет, достигается при равенстве углов падения и отражения (зеркальный эффект).
Таким образом, учитывая заданные значения параметров модели рассеяния/отражения излучения от поверхности СБ (и, при их учете, освещенных Солнцем элементов конструкции КА), определяют угловое положение СБ, при котором обеспечивается задаваемый уровень (например, максимизация) интенсивности LQ излучения, отраженного от поверхности СБ (и, при их учете, освещенных Солнцем элементов конструкции КА) в направлении на затененный от Солнца элементами конструкции КА участок Q поверхности КА, в котором наблюдают дефицит освещения, при значении угла α между вектором направления на Солнце и вектором нормали к рабочей поверхности СБ α≤αmax:

где  - интенсивность отраженного от j-ого освещенного Солнцем участка поверхности СБ (и, при их учете, освещенных Солнцем элементов конструкции КА) в направлении на затененный от Солнца элементами конструкции КА участок Q поверхности КА;
- интенсивность отраженного от j-ого освещенного Солнцем участка поверхности СБ (и, при их учете, освещенных Солнцем элементов конструкции КА) в направлении на затененный от Солнца элементами конструкции КА участок Q поверхности КА;
 - коэффициент, определяемый размерами и положением j-ого освещенного Солнцем участка поверхности СБ (и, при их учете, освещенных Солнцем элементов конструкции КА), от которого отраженное солнечное излучение поступает на затененный от Солнца элементами конструкции КА участок Q поверхности КА;
- коэффициент, определяемый размерами и положением j-ого освещенного Солнцем участка поверхности СБ (и, при их учете, освещенных Солнцем элементов конструкции КА), от которого отраженное солнечное излучение поступает на затененный от Солнца элементами конструкции КА участок Q поверхности КА;
J - множество освещенных Солнцем участков поверхности СБ (и, при их учете, освещенных Солнцем элементов конструкции КА), от которых отраженное солнечное излучение поступает на затененный от Солнца элементами конструкции КА участок Q поверхности КА;
αmax определяется (2).
Условие α≤αmax в соотношении (3) соответствует условию нахождения значения угла а в диапазоне (1).
Опишем технический эффект предлагаемого изобретения.
Предлагаемое техническое решение расширяет возможности по обеспечению требуемого уровня освещения задаваемых зон на внешней поверхности КА, снабженного подвижными СБ, путем их подсветки солнечным световым излучением, отраженным от поверхности СБ (и, при их учете, элементов конструкции КА). Например, такими зонами на внешней поверхности КА, в которых необходимо обеспечить требуемый уровень освещения, являются зоны нахождения экипажа КА в ходе выполнения операций ВКД экипажа КА или зоны на поверхности КА, представляющие наибольший интерес для выполнения их внешнего визуального осмотра с некоторого другого КА.
Достижение указанного результата обеспечивается за счет выполнения поворотов СБ таких, при которых в задаваемую зону на внешней поверхности КА направляется дополнительный поток отраженного от поверхности СБ солнечного светового излучения (в случае, когда СБ может закрывать собой (перекрывать) часть поверхности КА, - могут выполняться повороты СБ такие, при которых в задаваемую зону на внешней поверхности КА направляется дополнительный поток суммарно отраженного от поверхности СБ и поверхности освещенных Солнцем элементов конструкции КА солнечного светового излучения). При этом обеспечивается безусловное выполнение требования поддержания функционирования КА - требования генерации такого тока СБ, величина которого необходима и достаточна для снабжения электроэнергией бортовых потребителей КА.
Таким образом, предлагаемое техническое решение позволяет обеспечить требуемый уровень освещения требуемых/задаваемых зон на поверхности КА (зон, в которых наблюдают дефицит освещения) и одновременно обеспечить генерирование СБ электроэнергии для бортовых потребителей КА в заданном объеме.
В настоящее время технически все готово для реализации предложенного способа. Промышленное исполнение существенных признаков, характеризующих изобретение, не является сложным и может быть выполнено с использованием существующих технических средств.
Изобретение относится к управлению функционированием космического аппарата (КА) с солнечными батареями (СБ). Способ включает поддержание заданной ориентации КА и выставку СБ рабочей поверхностью к Солнцу. Измеряют угловое положение КА в инерциальном пространстве и ток нагрузки (Iн) от потребителей электроэнергии на КА. Поддерживают угловое отклонение СБ от направления на Солнце в диапазоне от нуля до величины, определяемой отношением тока Iн к его максимальному значению. При этом условии поворачивают СБ относительно КА до достижения заданного уровня освещенности затененного от Солнца участка поверхности КА светом, отраженным от поверхности СБ. Запоминают измеренное при этом угловое положение КА и при последующем отклонении от него текущего положения КА повторяют указанный поворот СБ. Технический результат состоит в обеспечении требуемой освещенности участков (рабочих зон) внешней поверхности КА. 2 ил.
Способ управления снабженным солнечными батареями космическим аппаратом, включающий повороты космического аппарата для построения и поддержания задаваемой ориентации космического аппарата и поворот солнечных батарей относительно космического аппарата для наведения нормали к рабочей поверхности солнечных батарей на Солнце, отличающийся тем, что измеряют угловое положение космического аппарата относительно инерциального пространства, измеряют ток нагрузки Iн от потребителей электроэнергии на космическом аппарате и осуществляют поворот солнечных батарей относительно космического аппарата при поддержании измеряемого значения угла между вектором направления на Солнце и вектором нормали к рабочей поверхности солнечных батарей в диапазоне ( ), где Imах - максимальный ток, вырабатываемый при ориентации рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам, при этом поворот солнечных батарей относительно космического аппарата осуществляют до достижения задаваемого уровня освещенности затененного от Солнца участка поверхности космического аппарата, в котором наблюдают дефицит освещения, отраженным от поверхности солнечных батарей солнечным световым излучением, по завершению последнего поворота солнечных батарей запоминают измеренное угловое положение космического аппарата относительно инерциального пространства и далее при отклонении текущего измеренного углового положения космического аппарата от последнего запомненного углового положения космического аппарата, превышающем задаваемую величину, повторяют предшествующий поворот солнечных батарей.
), где Imах - максимальный ток, вырабатываемый при ориентации рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам, при этом поворот солнечных батарей относительно космического аппарата осуществляют до достижения задаваемого уровня освещенности затененного от Солнца участка поверхности космического аппарата, в котором наблюдают дефицит освещения, отраженным от поверхности солнечных батарей солнечным световым излучением, по завершению последнего поворота солнечных батарей запоминают измеренное угловое положение космического аппарата относительно инерциального пространства и далее при отклонении текущего измеренного углового положения космического аппарата от последнего запомненного углового положения космического аппарата, превышающем задаваемую величину, повторяют предшествующий поворот солнечных батарей.
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЫХОДНОЙ МОЩНОСТИ СОЛНЕЧНОЙ БАТАРЕИ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2621816C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНОЙ ВЫХОДНОЙ МОЩНОСТИ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА | 2015 |
|
RU2624885C2 |
| ЭЛЕКТРОТЕРМИЧЕСКИЙ РАКЕТНЫЙ ДВИГАТЕЛЬ МАЛОЙ ТЯГИ | 2005 |
|
RU2368546C2 |
| US 6293502 B1, 25.09.2001 | |||
| JP 2012215348 A, 08.11.2012 | |||
| US 5089055 A1, 18.02.1992. | |||

