Изобретение относится к области космической техники, а именно к системам электроснабжения (СЭС) космических аппаратов (КА), и может быть использовано при управлении положением панелей их солнечных батарей (СБ).
Известен способ управления положением панелей СБ, принятый за аналог (см. [1], стр. 190-194; [2], стр. 57). Сущность способа заключается в следующем. Панели СБ ориентируются таким образом, что угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце составляет минимальную величину, что обеспечивает максимальный приход электроэнергии от СБ.
Для обеспечения высокой эффективности работы СБ на большинстве КА устанавливают систему их автоматической ориентации на Солнце. В состав такой системы входят солнечные датчики, логически преобразующие устройства и электрические приводы, управляющие положением СБ.
Недостаток указанного способа и системы управления положением СБ КА заключается в том, что в них не предусмотрены операции выставки СБ в фиксированные расчетные положения, например, для защиты от негативного воздействия факторов внешней среды (ФВС). В виде ФВС могут выступать потоки высокоэнергетических частиц солнечного излучения или потоки газов, выходящих из работающих двигателей ориентации КА.
Наиболее близким из аналогов, принятым за прототип, является способ управления положением СБ КА, описанный в [3], стр. 5. Сущность способа заключается в нижеследующем.
Осуществляют разворот панелей СБ в рабочее положение, соответствующее совмещению нормали к их освещенной рабочей поверхности с плоскостью, образуемой осью вращения панелей СБ и направлением на Солнце. Далее определяют момент времени начала негативного воздействия ФВС на рабочую поверхность СБ и осуществляют разворот панелей СБ на задаваемый угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце до момента времени начала воздействия указанных факторов и возвращение панелей СБ в рабочее положение после окончания указанного воздействия.
Обычно СБ в системе СЭС КА являются основными источниками электроэнергии и обеспечивают работу ее бортовых потребителей, включая подзаряд аккумуляторных батарей (АБ), являющихся вторичными источниками электроэнергии на борту КА, например, международной космической станции (МКС). Блок-схема системы управления ориентацией СБ для реализации способа, принятого за прототип, описана в [3] (см. [3], стр. 6) и содержит СБ, на жесткой подложке корпуса которой расположены четыре фотоэлектрические батареи (БФ1 БФ2, БФ3, БФ4), устройство поворота СБ (УПСБ); усилительно-преобразующее устройство (УПУ); блок управления ориентацией СБ по направлению на Солнце (БУОСБС); блок разворота СБ в заданное положение (БРСБЗП); два регулятора тока (PT1, РТ2), блок АБ (БАБ); зарядное устройство для АБ (ЗРУ АБ); блок формирования команд на заряд АБ (БФКЗ АБ); датчик тока нагрузки (ДТН); блок управления системой энергоснабжения (БУСЭС); шина электроснабжения (ШЭ). При этом СБ через свой первый выход, объединяющий выходы БФ1 и БФ4, соединена с первым входом УПСБ, и через второй выход, объединяющий выходы БФ2 и БФ3, соединена со вторым входом УПСБ. Выходы БУОСБС и БРСБЗП соединены соответственно с первым и вторым входами УПУ, выход которого, в свою очередь, соединен с третьим входом УПСБ. Первый и второй выходы УПСБ соединены соответственно с входами РТ1 и РТ2, а выходы РТ1 и РТ2 соединены с ШЭ. БАБ своим входом через ЗРУ АБ соединен с ШЭ. При этом ЗРУ АБ подключено своим первым входом к указанной шине, а ко второму входу ЗРУ АБ подключен выход ДТН, вход которого подключен, в свою очередь, к ШЭ. БАБ своим выходом подключен к первому входу БФКЗ АБ, а ко второму входу указанного блока подключен первый выход БУСЭС. Выход БФКЗ АБ подключен к третьему входу ЗРУ АБ. Второй и третий выходы БУСЭС подключены соответственно к первым входам БУОСБС и БРСБЗП. Третий выход УПСБ соединен со вторыми входами БУОСБС и БРСБЗП.
В режиме электроснабжения КА система работает следующим образом.
УПСБ служит для транзитной передачи электроэнергии от СБ до РТ1 и РТ2. Далее электроэнергия через регуляторы тока РТ1, РТ2 поступает на шину питания СЭС. На теневой части орбиты (при отсутствии тока от СБ) ЗРУ АБ за счет разряда блока АБ компенсирует дефицит электроэнергии на борту КА. Для указанных целей в ЗРУ АБ служит регулятор разряда АБ.
Наряду с этим, ЗРУ АБ содержит регулятор заряда АБ, который осуществляет регулирование зарядного тока БАБ. ЗРУ АБ осуществляет заряд БАБ через БФКЗ АБ. При этом для проведения зарядно-разрядных циклов в ЗРУ АБ используется информация от ДТН.
Одновременно с работой в режиме электроснабжения КА система решает задачи управления положением плоскостей панелей СБ. В зависимости от выполняемой программы полета КА приоритет на управление СБ отдается одному из блоков БУОСБС или БРСБЗП.
По команде с БУСЭС блок БУОСБС осуществляет управление ориентацией СБ на Солнце. Входной информацией для алгоритма управления СБ являются положение единичного вектора направления на Солнце относительно связанных с КА осей координат; положение СБ относительно корпуса КА, получаемое в виде текущих измеренных значений угла α между текущим положением нормали к рабочей поверхности СБ и направлением на Солнце с датчиков угла (ДУ), установленных на УПСБ. При ориентации СБ на Солнце α≈0. Выходной информацией алгоритма управления являются команды на вращение СБ относительно оси выходного вала УПСБ и команды на прекращение вращения. ДУ УПСБ выдают дискретные сигналы о положении СБ. Величина дискреты определяет точность ориентации СБ.
В штатном режиме ориентации КА, когда направление движения Солнца относительно связанных осей КА неизменно, СБ устанавливается относительно направления на Солнце с опережением по ходу движения Солнца на угол, соответствующий нескольким дискретам ДУ. Далее батарея остается в этом положении до тех пор, пока Солнце, за счет движения КА по орбите, не «переместится вперед» относительно СБ на соответствующий угол. После этого цикл вращения возобновляется.
БРСБЗП управляет СБ при помощи БУСЭС по программным уставкам. Алгоритм управления СБ по программным уставкам позволяет устанавливать батарею в любое требуемое положение, задаваемое требуемым значением угла α=αz. При этом для контроля угла разворота в БРСБЗП используется также информация с ДУ УПСБ.
УПУ играет роль интерфейса между БУОСБС, БРСБЗП и УПСБ.
Отметим (см. [2], стр. 272), что солнечное излучение, поступающее к Земле, отражается от ее поверхности, от облаков, рассеивается атмосферой. Энергия отраженного излучения, сосредоточенная в спектральном диапазоне области чувствительности солнечных элементов СБ, воспринимается СБ и увеличивает их выходную мощность. Величина отраженного излучения характеризуется понятием альбедо - отношением потока излучения, отраженного поверхностью, к потоку, упавшему на нее.
Таким образом, на освещенной части орбиты КА на СБ, кроме прямого солнечного излучения, попадает отраженный от Земли солнечный световой поток. Способ и система, принятые за прототип, имеют существенный недостаток - они не позволяют увеличивать приход электроэнергии за счет дополнительного использования отраженного от Земли солнечного излучения.
Задачей, стоящей перед предлагаемыми способом и системой для его осуществления, является увеличение прихода электроэнергии от СБ за счет дополнительного использования отраженного от Земли солнечного излучения.
Технический результат достигается тем, что в способе управления положением солнечных батарей космического аппарата, включающем разворот панелей солнечных батарей в рабочее положение, соответствующее совмещению нормали к их освещенной рабочей поверхности с плоскостью, образуемой осью вращения панелей солнечных батарей и направлением на Солнце, и разворот панелей солнечных батарей на задаваемый угол между нормалью к их освещенной рабочей поверхности и направлением на Солнце, дополнительно измеряют высоту орбиты космического аппарата, определяют освещенность космического аппарата Солнцем, на освещенной части орбиты космического аппарата измеряют угол возвышения Солнца над видимым с космического аппарата горизонтом Земли и сравнивают его измеренное значение со значением углового полураствора зоны чувствительности солнечных батарей, в моменты превышения значением углового полураствора зоны чувствительности солнечных батарей сравниваемого с ним значения измеряют текущее значение тока от солнечных батарей, сравнивают текущее значения тока от солнечных батарей со значением тока, вырабатываемым солнечными батареями при ориентации освещенной рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам при отсутствии попадания отраженного от Земли светового потока на поверхность панелей солнечных батарей, и в моменты превышения текущим значением тока от солнечных батарей сравниваемого с ним значения поворачивают солнечные батареи путем отворота нормали к освещенной рабочей поверхности солнечных батарей от направления на Солнце в сторону центра Земли до достижения углом между нормалью к освещенной рабочей поверхности солнечных батарей и направлением на Солнце значения αo, определяемого из соотношения
αo=arctg(sinϕ/(Iscos(ϕ-αo)/(I-Iscosαo)+cosϕ)),
где I - текущее значение тока от солнечных батарей;
Is - значение тока от солнечных батарей, вырабатываемого при ориентации освещенной рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам при отсутствии попадания отраженного от Земли светового потока на поверхность панелей солнечных батарей;
ϕ - значение угла между направлениями поступающих на солнечные батареи прямого и отраженного от Земли световых потоков, определяемое по углу возвышения Солнца над видимым с космического аппарата горизонтом Земли и высоте орбиты космического аппарата.
При этом поставленная задача решается тем, что в систему управления положением солнечных батарей космического аппарата, включающую солнечную батарею с установленными на ней четырьмя фотоэлектрическими батареями, устройство поворота солнечных батарей, усилительно-преобразующее устройство, блок управления ориентацией солнечных батарей по направлению на Солнце, блок разворота солнечных батарей в заданное положение, два регулятора тока, датчик тока, блок управления системой электроснабжения, при этом солнечная батарея своим первым выходом, объединяющим выходы двух фотоэлектрических батарей, соединена с первым входом устройства поворота солнечных батарей, и вторым выходом, объединяющим выходы двух других фотоэлектрических батарей, соединена со вторым входом устройства поворота солнечных батарей, первый и второй выходы которого соединены соответственно с входами первого и второго регуляторов тока, выходы которых соединены с входом датчика тока, первый и второй выходы блока управления системой электроснабжения соединены с первыми входами соответственно блока управления ориентацией солнечных батарей по направлению на Солнце и блока разворота солнечных батарей в заданное положение, а выходы блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение соединены соответственно с первым и вторым входами усилительно-преобразующего устройства, выход которого соединен с третьим входом устройства поворота солнечных батарей, третий выход которого соединен со вторыми входами блоков управления ориентацией солнечных батарей по направлению на Солнце и разворота солнечных батарей в заданное положение, дополнительно введены блок определения моментов освещенности космического аппарата, блок измерения высоты орбиты космического аппарата, блок измерения угла возвышения Солнца над видимым с КА горизонтом Земли, блок задания значения тока от солнечных батарей от прямого солнечного излучения, блок определения моментов превышения током от солнечных батарей заданного значения, блок определения моментов попадания отраженного солнечного излучения на рабочую поверхность солнечных батарей, блок управления разворотом солнечных батарей, элемент И, при этом выход датчика тока соединен с первым входом блока определения моментов превышения током от солнечных батарей заданного значения, второй вход и выход которого соединены соответственно с выходом блока задания значения тока от солнечных батарей от прямого солнечного излучения и первым входом элемента И, выход которого соединен с входом блока управления системой электроснабжения, третий выход которого соединен с первым входом блока управления разворотом солнечных батарей, выход и со второго по шестой входы которого соединены соответственно с третьим входом блока разворота солнечных батарей в заданное положение, третьим выходом устройства поворота солнечных батарей и выходами датчика тока, блока измерения высоты орбиты космического аппарата, блока задания значения тока от солнечных батарей от прямого солнечного излучения и блока измерения угла возвышения Солнца над видимым с КА горизонтом Земли, выход которого также соединен с входом блока определения моментов попадания отраженного солнечного излучения на рабочую поверхность солнечных батарей, выход которого соединен со вторым входом элемента И, третий вход которого соединен с выходом блока определения моментов освещенности космического аппарата.
В предлагаемом техническом решении достигается увеличение освещенности СБ (и, следовательно, генерации дополнительной электроэнергии) путем дополнительного использования отраженного от Земли солнечного излучения. Для этого СБ, ориентированную нормалью к своей рабочей поверхности на Солнце, поворачивают в сторону отраженного от Земли светового потока на угол, обеспечивающий максимальную суммарную освещенность СБ от суммы световых потоков, приходящих на СБ: прямого от Солнца и отраженного от Земли.
Сущность предлагаемых изобретений поясняется на фиг. 1, 2, 3, 4, на которых представлено: на фиг.1 - схема освещения СБ прямым и отраженным от Земли световыми потоками; на фиг.2 - схема освещения СБ в предлагаемом способе; на фиг.3 - схема геометрического построения, поясняющая определение вводимого далее угла γ; на фиг.4 - блок-схема реализующей предложенный способ системы.
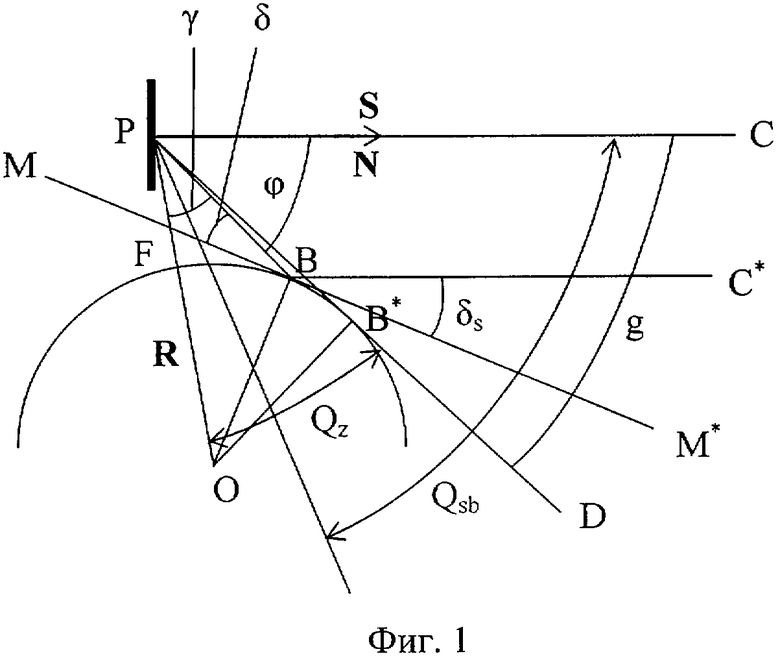
На фиг.1 и 2 все построения выполнены в плоскости, образованной радиус-вектором КА и направлением на Солнце и введены обозначения:
Р - СБ КА;
N - нормаль к рабочей поверхности СБ;
S, PC, ВС* - векторы направления на Солнце;
R, ОР - радиус-вектор орбиты КА;
Z - Земля;
О - центр Земли;
В - точка Земли, от которой отраженный световой поток попадает на КА;
ϕ - угол между направлениями от КА на Солнце и на точку В;
MM* - линия горизонта в точке В;
δ - угол падения и угол отражения от Земли солнечного светового потока, попадающего на КА;
PD - направление от КА на горизонт Земли;
В* - точка касания Земли линией PD;
g - угол возвышения Солнца над видимым с КА горизонтом Земли;
Qz - видимый с КА угловой полураствор Земли;
Qsb - угловой полураствор зоны чувствительности СБ, измеряемый от нормали к рабочей поверхности СБ;
γ - угол между направлениями РО и РВ;
OF - радиус Земли;
FP - высота орбиты КА.
На фиг.2 дополнительно обозначено:
αо - угол между N и S.
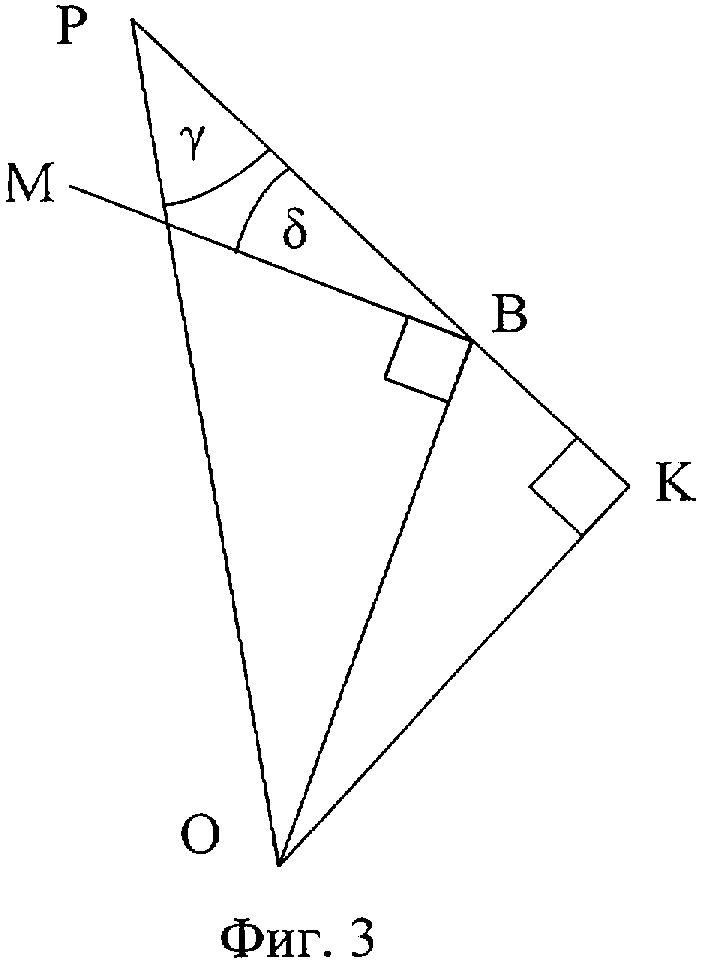
На фиг.3 используются обозначения, введенные для фиг.1, и дополнительно обозначено:
К - вершина прямого угла прямоугольного ΔОРК.
Поясним предложенные в способе действия.
В предложенном способе в моменты, когда отраженный от Земли световой поток попадает на рабочую поверхность СБ, осуществляют ориентацию СБ, при которой нормаль к рабочей поверхности СБ N совмещается с плоскостью, образованной радиус-вектором КА R и направлением на Солнце S, и повернута от направления на Солнце в сторону прихода отраженного от Земли светового потока (что совпадает с направлением в сторону центра Земли) на расчетное значение угла между N и S, обеспечивающее максимальную суммарную освещенность рабочей поверхности СБ прямым и отраженными от Земли светом. Данная ориентация СБ осуществляется поворотом N от S в сторону центра Земли на расчетное значение угла αо.
Попадание отраженного от Земли солнечного светового потока на КА возможно только на освещенной части орбиты, при этом расположение точки отражения В определяется соотношением углов падения и отражения светового потока - δs и δ соответственно.
Для попадания отраженного от Земли солнечного светового потока на КА требуется выполнение условия (см. фиг.1):

Отраженный от Земли световой поток воспринимается БФ СБ для выработки электроэнергии при выполнении условия (см. фиг.1):

где Qsb - угловой полураствор зоны чувствительности СБ.
Из (1), (2) следует, что попадание отраженного от Земли солнечного светового потока на рабочую поверхность СБ и его использование для выработки электроэнергии осуществляется при условии

Из равенства сумм углов, составляющих угол ОРС, следует:

Угол Qz определяется из треугольника ОРВ*:

где обозначено: Rc - радиус Земли, Но - высота орбиты КА.
Угол γ определяется из треугольников ОРВ и ОРК (см. фиг.3):




Углы ϕ, δ, δs связаны соотношением, получаемым из равенства углов при секущей РВ параллельных прямых PC и ВС*:

Подставляя в (4) выражения (5), (9), получаем соотношение для ϕ:

В достаточно общем случае, когда характер поверхности отражения позволяет предположить равенство углов падения и отражения:

(11) принимает вид:

по которому ϕ находится методом итераций (при этом в качестве начального приближения удобно взять значение угла g).
Отметим, что значения углов g и ϕ на рассматриваемом участке орбиты, определяемом условием (3), очень близки. Поэтому, если характер поверхности отражения не позволяет сделать вывод о соотношении углов падения и отражения, то полагаем

При отсутствии попадания на СБ отраженного от Земли светового потока ток I от СБ определятся выражением (см. [4], стр.109; [2], стр.57):

где Imax - максимальный ток, вырабатываемый при ориентации освещенной рабочей поверхности панелей СБ перпендикулярно солнечным лучам.
Обозначим:
Ps - величина потока прямого солнечного излучения,
Pо - величина потока отраженного от Земли солнечного излучения, попадающего на СБ.
Величина суммарного светового потока, поступающего на рабочую поверхность СБ при отклонении N от S в сторону прихода отраженного от Земли светового потока на угол α, рассчитывается по формуле:

Формулу для расчета значения угла а, доставляющего максимум (16), получаем приравнивая нулю производную данного выражения по α:

Применив формулу «синуса разности» из (17), имеем:


где Ро вычисляется по формуле, получаемой из соотношения (16):

Перейдя в (19), (20) от потоков Ps и Р к соответствующим им значениям токов Is и I, вырабатываемых от данных потоков при ориентации рабочей поверхности панелей СБ перпендикулярно потоку, получаем:

Обозначим αo - решение (21), которое находится методом итераций (при этом в качестве начального приближения удобно взять текущее значение угла α).
Отметим, что учет отраженного от Земли солнечного светового потока необходимо производить при выполнения условия

когда за счет попадания на рабочую поверхность СБ отраженного светового потока текущее значение тока от СБ превосходит максимально возможное значение тока, полученное при условии отсутствия попадания отраженного от Земли светового потока на СБ.
Для реализации способа предлагается система, представленная на фиг. 4 и содержащая следующие блоки:
1 - СБ, на жесткой подложке корпуса которой расположены четыре фотоэлектрические батареи;
2, 3, 4, 5 - БФ1, БФ2, БФ3, БФ4;
6 - УПСБ;
7 - УПУ;
8 - БУОСБС;
9 - БРСБЗП;
10, 11 - РТ1 и РТ2;
12 - ДТ;
13 - БУСЭС;
14 - блок определения моментов освещенности КА (БОМОКА);
15 - блок измерения высоты орбиты космического аппарата (БИВО);
16 - блок измерения угла возвышения Солнца над видимым с КА горизонтом Земли (БИУВСВГЗ) (16);
17 - блок задания значения тока от солнечных батарей от прямого солнечного излучения (БЗТСБПСИ);
18 - блок определения моментов превышения током от солнечных батарей заданного значения (БОМПТСБЗЗ);
19 - блок определения моментов попадания отраженного солнечного излучения на рабочую поверхность солнечных батарей (БОМПОСИРПСБ);
20 - блок управления разворотом солнечных батарей (БУРСБ);
21 - элемент И;
При этом СБ (1) через свой первый выход, объединяющий выходы БФ1 (2) и БФ4 (5), соединена с первым входом УПСБ (6), и через второй выход, объединяющий выходы БФ2 (3) и БФ3 (4), соединена со вторым входом УПСБ (6). Первый и второй выходы УПСБ (6) соединены с входами соответственно PT1 (10) и РТ2 (11). Выходы РТ1 (10) и РТ2 (11) соединены с входом ДТ (12). Первый и второй выходы БУСЭС (13) соединены с первыми входами БУОСБС (8) и БРСБЗП (9). Выходы БУОСБС (8) и БРСБЗП (9) соединены соответственно с первым и вторым входами УПУ (7). Выход УПУ (7) соединен с третьим входом УПСБ (6). Вторые входы БУОСБС (8) и БРСБЗП (9) соединены с третьим выходом УПСБ (6). Выход ДТ (12) соединен с первым входом БОМПТСБЗЗ (18), выход которого соединен с первым входом элемента И (21). Выход И (21) соединен с входом БУСЭС (13). Третий выход БУСЭС (13) соединен с первым входом БУРСБ (20). Выход БУРСБ (20) соединен с третьим входом БРСБЗП (9). Со второго по шестой входы БУРСБ (20) соединены соответственно с третьим выходом УПСБ (6) и выходами ДТ (12), БИВО (15), БЗТСБПСИ (17), БИУВСВГЗ (16). Выход БЗТСБПСИ (17) соединен также со вторым входом БОМПТСБЗЗ (18). Выход БИУВСВГЗ (16) соединен также с входом БОМПОСИРПСБ (19). Выход БОМПОСИРПСБ (19) соединен со вторым входом элемента И (21). Третий вход И (21) соединен с выходом БОМОКА (14).
На фиг. 4 также пунктиром показана механическая связь УПСБ (6) с корпусом СБ (1) через выходной вал привода СБ.
Система работает следующим образом.
УПСБ (6) служит для транзитной передачи электроэнергии от СБ (1) до РТ1 (10) и РТ2 (11), далее от которых она поступает на шину электропитания СЭС КА. При этом регуляторы тока РТ1 (10), РТ2 (11) соединены с ДТ (12), который измеряет текущее значение тока от СБ (1).
По команде с БУСЭС (13) блок БУОСБС (8) осуществляет управление ориентацией СБ (1) на Солнце. БУОСБС (8) может быть реализован на базе системы управления движением и навигацией (СУДН) КА (см. [5]). Входной информацией для алгоритма управления СБ являются положение единичного вектора направления на Солнце относительно связанных с КА осей координат, определяемое алгоритмами кинематического контура СУДН; положение СБ относительно корпуса КА, получаемое в виде текущих измеренных значений угла α с ДУ УПСБ (6). Выходной информацией алгоритма управления являются команды на вращение СБ относительно оси выходного вала УПСБ (6), команды на прекращение вращения. ДУ УПСБ (6) выдают дискретные сигналы о положении СБ (1).
В БОМОКА (14) определяются моменты времени, когда КА находится на освещенной Солнцем части орбиты КА. При нахождении КА на освещенной части орбиты БОМОКА (14) генерирует команду, поступающую на третий вход элемента И (21).
В БОМПТСБЗЗ (18) определяются моменты времени превышения текущим значением тока от СБ I, значение которого поступает на первый вход БОМПТСБЗЗ (18) с выхода ДТ (12), над значением тока от СБ Is, вырабатываемым при ориентации освещенной рабочей поверхности панелей СБ перпендикулярно солнечным лучам при условии отсутствия попадания отраженного от Земли солнечного светового потока на поверхность панелей СБ, значение которого поступает на второй вход БОМПТСБЗЗ (18) с выхода БЗТСБПСИ (17). При выполнении условия (22) БОМПТСБЗЗ (18) генерирует команду, поступающую на первый вход элемента И (21).
В БОМПОСИРПСБ (19) определяются моменты времени попадания отраженного от Земли солнечного светового потока на рабочую поверхность СБ. Для этого на вход БОМПОСИРПСБ (19) с выхода БИУВСВГЗ (16) поступает значение угла возвышения Солнца над видимым с КА горизонтом Земли g, которое сравнивается со значением углового полураствора зоны чувствительности СБ Qsb и определение искомых моментов осуществляется проверкой (3). При выполнении (3) БОМПОСИРПСБ (19) генерирует команду, поступающую на второй вход элемента И (21).
Когда все блоки БОМОКА (14), БОМПТСБЗЗ (18), БОМПОСИРПСБ (19) выдают команды на входы элемента И (21), с выхода элемента И (21) выдается команда, поступающая на вход БУСЭС (13).
По команде на входе БУСЭС (13) данный блок генерирует команду на первом выходе, которая подключает БУРСБ (20). БУРСБ (20) управляет работой БРСБЗП (9) для выполнения отворота нормали к рабочей поверхности СБ (1) на расчетный угол αz=αo от направления на Солнце в сторону Земли. В БУРСБ (20) по формулам (13), (14) и (21), использующим при вычислении значение Re и значения α, I, Но, g, Is, поступающие от УПСБ (6), ДТ (12), БИВО (15), БИУВСВГЗ (16), БЗТСБПСИ (17), рассчитывается значение угла αo и выдается команда в БРСБЗП (9) на реализацию разворота СБ (1) до положения αz=αo.
БРСБЗП (9) управляет СБ (1) по программным уставкам. Алгоритм управления СБ (1) по программным уставкам позволяет устанавливать батарею в любое задаваемое положение α=α2. При этом для контроля угла разворота в БРСБЗП (9) используется информация с ДУ УПСБ (6).
При обнулении любой из команд с БОМОКА (14), БОМПТСБЗЗ (18), БОМПОСИРПСБ (19), поступающих на входы элемента И (21), обнуляется команда, поступающая с элемента И (21) на вход БУСЭС (13) и он отключает БУРСБ (20) от управления блоком БРСБЗП (9) и, в зависимости от выполняемой программы полета КА, передает управление СБ одному из блоков БУОСБС(8) или БРСБЗП (9) напрямую.
Реализация БОМПТСБЗЗ (18), БОМПОСИРПСБ (19) возможна как на базе аппаратно-программных средств центра управления полетом (ЦУП) КА, так и на борту КА. Примером реализации БУСЭС (13) могут служить радиосредства служебного канала управления (СКУ) бортовыми системами КА «Ямал-100», состоящие из земной станции (ЗС) и бортовой аппаратуры (БА) (см. описание в [6, 7]). В частности, БА СКУ совместно с ЗС СКУ решает задачи выдачи в бортовую цифровую вычислительную систему (БЦВС) КА цифровой информации (ЦИ) и последующего ее квитирования. БЦВС, в свою очередь, осуществляет управление блоками БУОСБС (8), БРСБЗП (9), БУРСБ (20).
УПУ (7) играет роль интерфейса между БУОСБС (8), БРСБЗП (9) и УПСБ (6) и служит для преобразования цифровых сигналов в аналоговые и усиление последних.
БОМОКА (14), БИВО (15), БИУВСВГЗ (16) могут быть выполнены на базе датчиков и аппаратуры СУДН КА (см. [5], [8]). Реализация БУРСБ (20) и других блоков может быть произведена на базе БЦВС. Элемент И (21) может быть выполнен в виде элементарной аналоговой схем. СБ (1), УПСБ (6), PT1 (10) и РТ2 (11), ДТ (12) могут быть выполнены на базе элементов СЭС (см. [9]).
Таким образом, рассмотрен пример реализации основополагающих блоков системы, по результатам которых принимается решение и реализуются предложенные операции.
Опишем технический эффект предлагаемых изобретений.
Предлагаемые технические решения обеспечивают увеличение прихода электроэнергии за счет увеличения освещенности СБ путем увеличения использования отраженного от Земли солнечного излучения.
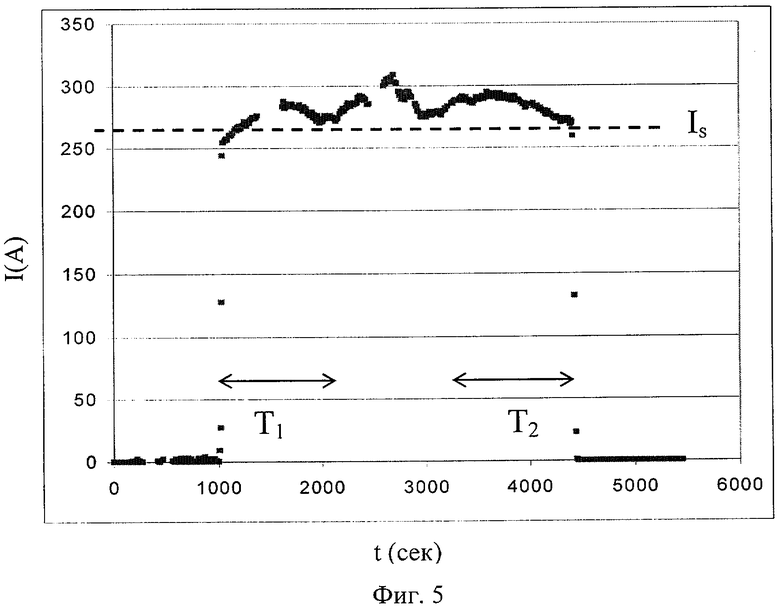
Для примера на фиг. 5 представлен график прихода электроэнергии от СБ российского сегмента МКС I(А) от времени t(сек) в течение витка орбиты МКС при поддержании ориентации СБ на Солнце: 02.02.2004 г., виток 1704, время 17.35-19.06 ДВМ, ориентация ИСК (см. [10]). На графике указан уровень тока Is, соответствующий прямому солнечному излучению при отсутствии попадания отраженного от Земли излучения на СБ, и отмечены интервалы времени T1 и Т2, расположенные в начале и конце светового участка орбиты, соответствующие условию (3). Понижение тока в начале и конца светового участка обусловлено поглощением солнечного излучения атмосферой на участках восхода и захода Солнца. График иллюстрирует, что на интервалах T1 и Т2 выполняется условие (22), т.е. на СБ дополнительно попадает отраженный от Земли световой поток, и выполнение поворота СБ на расчетный угол αo позволяет максимально увеличить выработку электроэнергии СБ от суммарного светового потока, поступающего на СБ.
Таким образом, технический эффект, заключающийся в увеличении прихода электроэнергии, достигается выполнением предложенного поворота СБ от направления на Солнце в сторону Земли на расчетный угол, определяемый по предложенной методике.
ЛИТЕРАТУРА
1. Елисеев А.С. Техника космических полетов. Москва, «Машиностроение», 1983.
2. Раушенбах Г. Справочник по проектированию солнечных батарей. Москва, Энергоатомиздат, 1983.
3. Ковтун B.C., Соловьев С.В., Заикин С.В., Городецкий А.А. Способ управления положением солнечных батарей космического аппарата и система для его осуществления. Описание изобретения к патенту РФ №2242408 по заявке 2003108114/11 от 24.03.2003 г.
4. Грилихес В.А., Орлов П.П., Попов Л.Б. Солнечная энергия и космические полеты. Москва, Наука, 1984.
5. Система управлением движением и навигации КА. Техническое описание. 300ГК.12Ю. 0000-АТО. РКК «Энергия», 1998.
6. Земная станция служебного канала управления КА «Ямал». Руководство по эксплуатации. ЗСКУГК.0000-0РЭ. РКК «Энергия», 2001.
7. Бортовая аппаратура служебного канала управления КА «Ямал». Техническое описание. 300ГК.15Ю. 0000А201-ОТО. РКК «Энергия», 2002.
8. Инженерный справочник по космической технике. Изд-во МО ССР, М., 1969.
9. Система электроснабжения КА. Техническое описание. 300ГК.20Ю. 0000-АТО. РКК «Энергия», 1998.
10. Рулев Д.Н., Стажков В.М., Корнеев А.П., Пантелеймонов В.Н., И.В.Мельник. Оценка эффективности работы солнечных батарей российского сегмента международной космической станции по данным телеметрической информации // Труды XXXIX Чтений, посвященных разработке научного наследия и развитию идей К.Э.Циолковского (Калуга, 14-16 сентября 2004 г.). Секция «Проблемы ракетной и космической техники». - Казань: Казанский государственный университет им. В.И.Ульянова-Ленина. 2005.

Изобретения относятся к электроснабжению космических аппаратов (КА) с помощью солнечных батарей (СБ). Предлагаемый способ включает разворот панелей СБ в рабочее положение, соответствующее совмещению нормали к их освещенной рабочей поверхности с плоскостью, образуемой осью вращения панелей СБ и направлением на Солнце, и разворот панелей СБ на задаваемый угол между указанной нормалью и направлением на Солнце. На освещенной части орбиты КА измеряют угол возвышения Солнца над местным горизонтом и сравнивают его со значением углового полураствора зоны чувствительности СБ. В моменты превышения этого угла данным значением измеряют текущее значение тока от СБ и сравнивают его с током, вырабатываемым СБ при ориентации их рабочей поверхности на Солнце, при отсутствии попадания отраженного от Земли света на поверхность СБ. В моменты превышения текущим значением тока от СБ сравниваемого с ним значения отворачивают СБ от направления на Солнце в сторону центра Земли на определенный угол так, чтобы на СБ падали прямой и отраженный от Земли световые потоки. Предлагаемая система управления включает в себя необходимые блоки и связи между ними для выполнения описанных выше операций. Причем в нее введены блок определения моментов освещенности КА, блок измерения высоты орбиты КА, блок измерения угла между направлениями на Солнце и горизонтом, блок задания значения тока от СБ от прямого солнечного излучения, блок определения моментов превышения током от СБ заданного значения, блок определения моментов попадания отраженного солнечного излучения на рабочую поверхность СБ, блок управления разворотом СБ, а также элемент И. Технический результат изобретений состоит в увеличении выработки электроэнергии на борту КА за счет использования отраженного от Земли солнечного излучения. 2 н.п. ф-лы, 5 ил.
αо=arctg(sinϕ/(Iscos(ϕ-αo)/(I-Iscosαo)+cosϕ)),
где I - текущее значение тока от солнечных батарей,
Is - значение тока от солнечных батарей, вырабатываемого при ориентации освещенной рабочей поверхности панелей солнечных батарей перпендикулярно солнечным лучам при отсутствии попадания отраженного от Земли светового потока на поверхность панелей солнечных батарей,
ϕ - значение угла между направлениями поступающих на солнечные батареи прямого и отраженного от Земли световых потоков, определяемое по углу возвышения Солнца над видимым с космического аппарата горизонтом Земли и высоте орбиты космического аппарата.
| СПОСОБ УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ СОЛНЕЧНЫХ БАТАРЕЙ КОСМИЧЕСКОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2242408C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
| US 6227497 А, 08.05.2001 | |||
| US 5653407 А, 05.08.1997 | |||
| US 5257759 А, 02.11.1993. | |||

