Область техники
Настоящее раскрытие в целом относится к датчику кислорода, соединенному с заборным каналом двигателя внутреннего сгорания.
Уровень техники и раскрытие изобретения
Двигатели могут содержать датчик кислорода, соединенный с заборным каналом, для определения содержания кислорода в свежем всасываемом воздухе. В частности, датчик измеряет парциальное давление кислорода в заряде воздуха после уравновешивания. Затем величина заряда воздуха может быть скорректирована на присутствие разбавителей, могущих вступать в реакцию с кислородом на датчике и, тем самым, влиять на показание датчика. Например, показание датчика кислорода корректируют на присутствие влаги, углеводородов от РОГ (EGR), топливных паров от продувки, топливных паров от вентиляции картера и т.п. Один пример такого решения раскрыт Сурнилла (Surnilla) с соавторами в заявке на патент США 20140251285.
Скорректированный результат оценки заряда воздуха можно использовать для регулирования подачи топлива в двигатель. Однако авторы настоящего изобретения выявили потенциальные недостатки такого решения для оценки заряда воздуха. В качестве одного примера, результат оценки заряда воздуха может быть корректным для регулирования подачи топлива, но некорректным для оценки крутящего момента. Это обусловлено тем, что разбавители-углеводороды, на которые делают поправку при оценке заряда воздуха, участвуют в сгорании в цилиндре и, тем самым, способствуют созданию крутящего момента. Поэтому, если для регулирования крутящего момента используют скорректированный на разбавители результат оценки заряда воздуха, это может привести к созданию чрезмерного крутящего момента, отрицательно влияющего на управляемость. Кроме того, даже небольшие погрешности оценки разбавителей могу привести к значительным погрешностям оценки заряда воздуха, подаваемого в двигатель, и, как следствие, оценки количества топлива для подачи в двигатель и крутящего момента. Еще один потенциальный недостаток состоит в том, что для определения фактической (в отличие от номинальной) подачи форсунки необходимо отключить другие источники топлива (например, восстановителей) и разбавителей. А именно, для определения поправок как для форсунок, так и для заряда воздуха, РОГ, продувка и вентиляция картера должны быть выключены. Поэтому интервал для определения адаптивных поправок, например, адаптивной поправки по топливу, и диагностики датчика кислорода является ограниченным.
В одном примере как минимум некоторые из вышеуказанных недостатков может преодолеть способ для двигателя, содержащий шаги, на которых: в условиях наличия потока одного или нескольких разбавителей в двигатель, регулируют подачу топлива в двигатель в соответствии с показанием датчика кислорода во всасываемом воздухе независимо от указанных разбавителей, и определяют адаптивную поправку по топливу. Так можно достовернее оценивать подачу топлива и крутящий момент с помощью датчика кислорода во всасываемом воздухе. Кроме того, определение адаптивной поправки по топливу можно выполнять без необходимости выключения РОГ, продувки топливных паров или вентиляции картера.
Например, в условиях работы двигателя с включенными РОГ, и/или продувкой, и/или вентиляцией картера, контроллер может оценивать чистое содержание кислорода во всасываемом заряде воздуха в соответствии с показанием датчика кислорода, соединенного с заборным каналом двигателя. Необходимость в коррекции значения чистого содержания кислорода с поправкой на разбавители, например, топливные пары от продувки или вентиляции картера и газы РОГ, может отсутствовать. В частности, авторы настоящего изобретения выявили, что каталитический датчик кислорода измеряет чистую концентрацию кислорода, для которой нужно соответствующее количество топлива. Следовательно, результат оценки заряда воздуха в соответствии с показанием датчика кислорода нечувствителен к присутствию разбавителей в воздухе (то есть не зависит от него). Нескорректированное показание датчика кислорода используют для регулирования подачи топлива, а показание содержания кислорода с поправкой на разбавители - для регулирования крутящего момента двигателя. Например, показание содержания кислорода можно корректировать по результатам измерения содержания газов РОГ и/или влаги (измеряемых датчиком кислорода или специально предназначенным для этого датчиком), а результат оценки заряда воздуха в соответствии со скорректированным показанием можно использовать для регулирования крутящего момента. Кроме того, во время наличия потоков РОГ или углеводородов от продувки или ПВК (PCV), можно выполнить определение адаптивной поправки по топливу. Например, можно определить погрешность топливной форсунки и/или погрешности датчика МРВ (MAF).
Таким образом, в соответствии с показанием датчика кислорода во всасываемом воздухе можно регулировать подачу топлива и крутящий момент. По существу, датчик кислорода обеспечивает преимущество, состоящее в возможности его использования в качестве датчика давления во впускном коллекторе для оценки заряда воздуха в определенных условиях. Технический эффект, достигаемый использованием нескорректированного показания датчика кислорода для оценки заряда воздуха, по результатам которой регулируют подачу топлива, состоит в возможности точного регулирования подачи топлива в двигатель независимо от присутствия разбавителей. Кроме того, определение адаптивной поправки по топливу можно выполнять при наличии потоков газов РОГ, паров от продувки или ПВК, что увеличивает интервал для определения адаптивной поправки по топливу. Технический эффект, достигаемый использованием скорректированного на разбавители показания датчика кислорода для оценки заряда воздуха, по результатам которой регулируют крутящий момент, состоит в возможности точного регулирования и подачи топлива, и крутящего момента по показанию одного и того же датчика кислорода. Кроме того, по данному показанию датчика кислорода во всасываемом воздухе можно корректировать или подтверждать показание датчика давления в коллекторе или расхода воздуха в двигатель. Возможность определения адаптивной поправки в более широком диапазоне условий эксплуатации, в том числе во время поступления топливных паров в двигатель, позволяет более эффективно определять адаптивную поправку в течение цикла езды. В целом происходит улучшение эксплуатационных показателей двигателя.
Следует понимать, что вышеприведенное краткое раскрытие служит лишь для ознакомления в простой форме с некоторыми концепциями, которые далее будут раскрыты подробно в разделе «Осуществление изобретения». Это раскрытие не предназначено для обозначения ключевых или существенных отличительных признаков заявленного предмета изобретения, объем которого уникально определен формулой изобретения, приведенной после раздела «Осуществление изобретения». Кроме того, заявленный предмет изобретения не ограничен реализациями, которые устраняют какие-либо недостатки, указанные выше или в любой другой части настоящего раскрытия.
Краткое описание фигур чертежа
На ФИГ. 1 представлена принципиальная схема системы двигателя, содержащей датчик кислорода во всасываемом воздухе O2BB (IAO2).
На ФИГ. 2 представлена принципиальная схема примера датчика кислорода во всасываемом воздухе.
На ФИГ. 3 изображена блок-схема для расчета массы воздуха в соответствии с показанием датчика кислорода во всасываемом воздухе, используемому для регулирования подачи топлива и оценки крутящего момента.
На ФИГ. 4 изображена блок-схема способа для эксплуатации датчика кислорода во всасываемом воздухе по ФИГ. 1 для определения заряда воздуха в цилиндр и регулирования параметра работы двигателя.
На ФИГ. 5 изображена блок-схема, иллюстрирующая способ для обработки показания датчика кислорода во всасываемом воздухе как минимум для регулирования подачи топлива в двигатель.
На ФИГ. 6 представлены диаграммы моментов зажигания, иллюстрирующие события в цилиндре для четырех отдельных цилиндров и соответствующие им углы поворота коленчатого вала и события снятия показаний датчика кислорода во всасываемом воздухе (датчика O2BB).
На ФИГ. 7 представлен пример снятия и буферизации синусоидального сигнала при двух разных частотах вращения двигателя.
Осуществление изобретения
Нижеследующее раскрытие относится к системам и способам для достоверной оценки заряда всасываемого воздуха в двигателе с помощью датчика кислорода, расположенного в заборном канале двигателя, например, системы двигателя на ФИГ. 1. Один пример осуществления датчика кислорода во всасываемом воздухе раскрыт на ФИГ. 2. По нескорректированному показанию датчика кислорода, полученному в присутствии потока разбавителя (например, в присутствии потока РОГ, потока топливных паров от продувки или потока топливных паров от вентиляции картера), можно определить чистое содержание кислорода во всасываемом заряде воздуха и использовать его для регулирования подачи топлива и крутящего момента (ФИГ. 3-4). Контроллер может быть выполнен с возможностью снятия показаний датчика кислорода с равным временным шагом (например, с временным шагом 1 миллисекунда) и присвоения снятым показаниям меток угла. Помеченные по углу поворота коленчатого вала снятые сигналы датчика кислорода могут быть буферизованы с возможностью обращения к подмножеству буферизованных снятых показаний во время работы двигателя для определения заряда воздуха в цилиндр и последующего регулирования параметров работы указанного двигателя. Как подробно раскрыто на примере ФИГ. 5, снятые показания с меткой угла, соответствующей прошлому периоду сгорания можно извлечь и усреднить во время текущего периода сгорания для использования при регулировании подачи топлива и крутящего момента двигателя. График снятия показаний датчика (ФИГ. 6) задают заранее с равными временными интервалами, при этом после того, как каждому снятому показанию будет присвоена метка угла, данную информацию сохраняют в буферной памяти с возможностью обращения к ней контроллера. Пример сравнения снятия и буферизации показаний датчика при относительно высокой и относительно низкой частоте вращения двигателя представлен на ФИГ. 7. Так можно сократить время обработки сигнала без снижения достоверности результата.
ФИГ. 1 представляет собой принципиальную схему, изображающую один из цилиндров многоцилиндрового двигателя 10, который может входить в состав силовой установки автомобиля. Двигателем 10 можно как минимум частично управлять с помощью системы управления, содержащей контроллер 12, и управляющих воздействий водителя 132 через устройство 130 ввода. В данном примере устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали для формирования пропорционального сигнала положения педали ПП (РР). Камера 30 сгорания (то есть цилиндр) двигателя 10 может содержать стенки 32 цилиндра с расположенным между ними поршнем 36. Поршень 36 может быть соединен с коленчатым валом 40 для преобразования возвратно-поступательных движений поршня во вращение коленчатого вала. Коленчатый вал 40 может быть соединен с как минимум одним ведущим колесом транспортного средства через промежуточную систему передачи. Кроме того, для обеспечения запуска двигателя 10, с коленчатым валом 40 может быть связан стартер через маховик.
Всасываемый воздух может поступать в камеру 30 сгорания из впускного коллектора 44 через заборный канал 42, а отработавшие газы могут выходить через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут избирательно сообщаться с камерой 30 сгорания через впускной клапан 52 и выпускной клапан 54 соответственно. В некоторых вариантах камера 30 сгорания может содержать два и более впускных клапана и/или два и более выпускных клапана.
В данном примере впускной клапан 52 и выпускной клапан 54 могут приводиться в действие системами 51 и 53 кулачкового привода соответственно. Системы 51 и 53 кулачкового привода могут содержать один или несколько кулачков и могут быть выполнены с возможностью выполнения одной или нескольких из следующих функций: переключение профиля кулачков ППК (CPS), изменение фаз кулачкового распределения ИФКР (VCT), изменение фаз газораспределения ИФГ (WT) и/или изменение высоты подъема клапанов ИВПК (WL), которыми может управлять контроллер 12 для регулирования работы клапанов. Положение впускного клапана 52 и выпускного клапана 54 можно определять с помощью датчиков 55 и 57 положения соответственно. В других вариантах впускной клапан 52 и/или выпускной клапан 54 могут быть электроприводными. Например, в другом варианте цилиндр 30 может содержать впускной клапан с электроприводом и выпускной клапан с кулачковым приводом, включая системы ППК и/или ИФКР.
В некоторых вариантах любой из цилиндров двигателя 10 может быть выполнен с одной или несколькими топливными форсунками для подачи в него топлива. В качестве неограничивающего примера, цилиндр 30 показан содержащим одну топливную форсунку 66. Топливная форсунка 66 показана соединенной непосредственно с цилиндром 30 для впрыска топлива непосредственно в него пропорционально длительности импульса впрыска ДИВ (FPW) согласно сигналу, полученному от контроллера 12 через электронный формирователь 68. Таким образом, топливная форсунка 66 обеспечивает известный из уровня техники «непосредственный впрыск» (далее также именуемый «НВ» (DI)) топлива в цилиндр 30 сгорания.
Следует понимать, что в других вариантах форсунка 66 может представлять собой форсунку впрыска во впускной канал выше по потоку от цилиндра 30. Следует также понимать, что топливо в цилиндр 30 может поступать из нескольких форсунок, например, из нескольких форсунок впрыска во впускной канал, несколько форсунок непосредственного впрыска, или их комбинаций.
Топливный бак в топливной системе 72 может содержать разные виды топлива с различными характеристиками, например, с разным составом. В число различий могут входить: разное содержание спирта, разное октановое число, разная скрыта теплота парообразования, разные компоненты топливной смеси и/или комбинации этих различий и т.п. Например, в двигателе можно использовать спиртосодержащую топливную смесь, например Е85 (состоящую приблизительно на 85% из этанола и на 15% из бензина) или М85 (состоящую приблизительно на 85% из метанола и на 15% из бензина). В другом варианте двигатель может работать на смеси с другими соотношениями бензина и этанола в баке, в том числе 100% бензина и 100% этанола, и с переменным соотношением между ними, в зависимости от содержания спирта в топливе, заправляемом водителем в бак. Кроме того, характеристики топлива в баке могут часто меняться. В одном примере водитель может в один день заправить в бак Е85, на следующий день - Е10, а на другой день - Е50. Поэтому, в зависимости от уровня и состава топлива, находящегося в баке на момент дозаправки, состав топлива в баке может резко меняться.
В еще одном примере топливная система может содержать первый топливный бак для первого, жидкого, топлива, например, бензинового или дизельного топлива, и второй топливный бак для второго, газообразного, топлива, например, сжатого природного газа СПГ (CNG). В таком примере первый топливный бак может быть соединен с форсункой непосредственного впрыска с возможностью подачи из него первого топлива в цилиндр непосредственным впрыском, а второй топливный бак может быть соединен с форсункой впрыска во впускной канал с возможностью подачи из него второго топлива в цилиндр впрыском во впускной канал. В данном случае следует понимать, что второго, газообразное, топливо может храниться в топливном баке под давлением, в жидком состоянии с возможностью подачи в топливную рампу также в жидком состоянии, при этом переход указанного топлива в газообразное состояние происходит в цилиндре.
Следует понимать, что, несмотря на то, что в одном примере двигатель можно эксплуатировать, подавая топливную смесь переменного состава через форсунку непосредственного впрыска, в других вариантах двигатель можно эксплуатировать, используя две форсунки и изменяя относительное количество топлива, подаваемого каждой из указанных форсунок. Также следует понимать, что, когда двигатель работает с наддувом, создаваемым нагнетательным устройством, например, турбокомпрессором или нагнетателем (не показаны), предел наддува можно увеличивать по мере увеличения содержания спирта в топливной смеси переменного состава.
Вернемся к ФИГ. 1: заборный канал 42 может содержать дроссель 62 с дроссельной заслонкой 64. В данном конкретном примере положение дроссельной заслонки 64 может изменять контроллер 12, направляя сигнал на электромотор или привод в составе дросселя 62; данную конфигурацию обычно называют «электронный привод дроссельной заслонки» ЭПДЗ (ETC). Таким образом, дроссель 62 выполнен с возможностью регулировать подачу всасываемого воздуха в камеру 30 сгорания среди прочих цилиндров двигателя. Контроллер 12 может получать информацию о положении дроссельной заслонки 64 в виде сигнала положения дросселя ПД (TP). Заборный канал 42 может содержать датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе для направления сигналов МРВ (MAF) и ДВК (MAP) в контроллер 12. В одном варианте осуществления заборный канал 42 может дополнительно содержать датчик 121 влажности для измерения влажности окружающей среды. В другом варианте датчик 121 влажности можно, дополнительно или вместо заборного канала, установить в выпускном канале 48.
Система 88 зажигания может подавать искру зажигания в камеру 30 сгорания с помощью свечи 92 зажигания по сигналу опережения зажигания ОЗ (SA) от контроллера 12 в определенных режимах работы. Несмотря на то, что на фигуре показаны компоненты искрового зажигания, в некоторых вариантах камера 30 сгорания, либо одна или несколько других камер сгорания двигателя 10 могут работать в режиме воспламенения от сжатия, с искрой зажигания или без нее.
Датчик 126 отработавших газов (например, датчик кислорода в отработавших газах) показан установленным в выпускном канале 48 выше по потоку от устройства 70 снижения токсичности выбросов. Датчик 126 может представлять собой датчик любого типа, подходящего для определения воздушно-топливного отношения в отработавших газах, например: линейный датчик кислорода или УДКОГ (UEGO) (универсальный или широкодиапазонный датчик кислорода в отработавших газах), двухрежимный датчик кислорода или ДКОГ (EGO), НДКОГ (HEGO) (нагреваемый ДКОГ), датчик оксидов азота, углеводородов или угарного газа. Указанный датчик также можно эксплуатировать в режиме переменного напряжения в условиях без подачи топлива для оценки содержания влаги в воздухе окружающей среды, поступающем в двигатель.
Устройство 70 снижения токсичности выбросов показано установленным в выпускном канале 48 ниже по потоку от датчика 126 отработавших газов. Устройство 70 может представлять собой трехкомпонентный каталитический нейтрализатор ТКН (TWC), накопитель оксидов азота, устройство снижения токсичности выбросов какого-либо иного типа или их комбинацию. В некоторых вариантах, во время работы двигателя 10, устройство 70 снижения токсичности выбросов можно периодически регенерировать, подавая в как минимум один из цилиндров двигателя смесь с определенным диапазоном воздушно-топливного отношения.
Кроме того, в раскрываемых вариантах осуществления система рециркуляции отработавших газов РОГ (EGR) может направлять необходимую часть отработавших газов из выпускного канала 48 во впускной коллектор 44 по магистрали 140 РОГ. Количество газов РОГ, подаваемых во впускной коллектор 44, может регулировать контроллер 12 с помощью клапана 142 РОГ. Датчик 144 РОГ может быть установлен в магистрали РОГ с возможностью выдачи показаний давления, и/или температуры, и/или концентрации отработавших газов. В определенных условиях, систему РОГ можно использовать для регулирования температуры топливовоздушной смеси внутри камеры сгорания, обеспечивая, таким образом, способ регулирования момента зажигания в некоторых режимах сжигания топлива. Кроме того, в некоторых режимах, часть газообразных продуктов сгорания можно удерживать или улавливать в камере сгорания, изменяя фазы газораспределения выпускных клапанов, например, путем регулирования механизма изменения фаз газораспределения.
Линейный датчик 172 кислорода (в настоящем описании также именуемый «датчик кислорода во всасываемом воздухе») может быть расположен в заборном канале ниже по потоку от впускного дросселя. Датчик 172 кислорода во всасываемом воздухе можно использовать при регулировании РОГ. Кроме того, по показаниям датчика кислорода во всасываемом воздухе можно оценивать содержание кислорода в воздухе окружающей среды, поступившем в заборный канал. Датчик измеряет чистое содержание кислорода во всасываемом воздухе с возможностью определения расхода кислорода, поступающего в цилиндры двигателя. Датчик также выполнен с возможностью работы в режиме переменного опорного напряжения в условиях без подачи топлива для оценки содержания влаги в воздухе окружающей среды, поступившем в заборный канал. Кроме того, как подробно раскрыто в настоящем описании, в соответствии с показанием датчика кислорода во всасываемом воздухе можно оценивать заряд воздуха независимо от присутствия разбавителей. По этому (нескорректированному) результату оценки заряда воздуха можно регулировать подачу топлива в двигатель, поскольку результат оценки чистого заряда воздуха с помощью датчика соответствует количеству воздуха, которое должно быть учтено при подаче топлива. В отличие от него, по скорректированному на разбавители результату оценки заряда воздуха регулируют крутящий момент двигателя, так как углеводородные разбавители сгорают в цилиндре и способствуют созданию крутящего момента. По существу, регулирование подачи топлива в двигатель в зависимости от скорректированного показания датчика кислорода обеспечивает преимущество, состоящее в возможности использования датчика кислорода в качестве датчика давления в коллекторе (ДВК). В некоторых примерах показание датчика ДВК двигателя можно подтверждать или корректировать по результату оценки заряда воздуха датчиком кислорода.
Отверстие 182 ПВК может быть выполнено для подачи газов от вентиляции картера (прорывных газов) во впускной коллектор двигателя ниже по потоку от впускного дросселя 62. В некоторых вариантах осуществления поток от принудительной вентиляции картера (ПВК, содержащий воздух и картерные газы) через отверстие 182 ПВК может регулировать специально предназначенный для этого клапан отверстия ПВК. Аналогичным образом, продувочное отверстие 184 может быть выполнено для подачи газов от продувки адсорбера топливной системы во впускной коллектор двигателя по каналу 44. В некоторых вариантах осуществления поток газов от продувки (содержащий воздух и топливные пары от продувки адсорбера) через продувочное отверстие 184 может контролировать специально предназначенный для этого клапан продувочного отверстия (также именуемый «клапан продувки адсорбера»). Так как газы от продувки и ПВК подают непосредственно во впускной коллектор, при этом поступление газов от продувки и ПВК происходит выше по потоку от датчика 172 кислорода во всасываемом воздухе, они влияют на показание датчика. То есть датчик измеряет концентрацию кислорода в воздухе, содержащем разбавители. Вытесняя кислород, разбавители снижают концентрацию кислорода в воздухе. В частности, при измерении датчиком кислорода содержания топливных углеводородов, например, топливных паров от продувки, сначала происходит их сгорание/катализация на датчике. Катализируя углеводороды на датчике, датчик 172 кислорода во всасываемом воздухе измеряет чистое содержание кислорода в воздухе. Иначе говоря, датчик измеряет концентрацию кислорода в воздухе, только если все топливные углеводороды были сожжены.
Контроллер 12 показан на ФИГ. 1 в виде микрокомпьютера, содержащего микропроцессорное устройство 102, порты 104 ввода/вывода, электронную среду хранения выполняемых программ и калибровочных значений, в данном примере показанную в виде однокристального постоянного запоминающего устройства 106, оперативное запоминающее устройство 108, энергонезависимое запоминающее устройство 110 и шину данных. Контроллер 12 может принимать, в дополнение к рассмотренным выше сигналам, разнообразные сигналы от связанных с двигателем 10 датчиков, в том числе показания: массового расхода всасываемого воздуха (МРВ) от датчика 120 массового расхода воздуха; температуры хладагента двигателя ТХД (ЕСТ) от датчика 112 температуры, связанного с рубашкой 114 охлаждения двигателя; сигнал профиля зажигания ПЗ (PIP) от датчика 118 на эффекте Холла (или датчика иного типа), связанного с коленчатым валом 40; положения дросселя (ПД) от датчика положения дросселя; сигнал абсолютного давления воздуха в коллекторе (ДВК) от датчика 122. Сигнал частоты вращения двигателя (оборотов в минуту) может быть сгенерирован контроллером 12 из сигнала ПЗ.
В носитель информации - постоянное запоминающее устройство 106 - могут быть введены машиночитаемые данные, представляющие собой команды, исполняемые микропроцессором 102 для выполнения раскрытых в настоящей заявке способов, а также других предполагаемых, но конкретно не перечисленных вариантов. Способы раскрыты на примерах ФИГ. 4-5.
Как раскрыто выше, на ФИГ. 1 показан только один цилиндр многоцилиндрового двигателя, при этом любой его цилиндр может также включать собственный комплект впускных / выпускных клапанов, топливную форсунку, свечу зажигания и т.п.
Далее, на ФИГ. 2, схематически изображен пример осуществления датчика 200 кислорода, выполненного с возможностью измерения концентрации кислорода (О2) в потоке всасываемых газов. Датчик 200 может функционировать как датчик 172 кислорода во всасываемом воздухе на ФИГ. 1, например. Датчик 200 содержит множество слоев одного или нескольких керамических материалов, расположенных друг над другом. В варианте на ФИГ. 2 показаны пять керамических слоев в виде слоев 201, 202, 203, 204 и 205. Эти слои включают в себя один или несколько слоев твердого электролита с кислородно-ионной проводимостью. Примеры подходящих твердых электролитов включают в себя, помимо прочих, материалы на основе окиси циркония. Кроме того, в некоторых вариантах может быть установлен нагреватель 207, находящийся в тепловом контакте с указанными слоями для увеличения их ионной проводимости. Несмотря на то, что изображенный датчик кислорода сформирован из пяти керамических слоев, следует понимать, что датчик кислорода может содержать любое подходящее количество керамических слоев.
Слой 202 содержит материал или материалы, создающие диффузионный путь 210. По диффузионному пути 210 отработавшие газы могут проникать в первую внутреннюю полость 222 за счет диффузии. Диффузионный путь 210 может быть выполнен с возможностью пропуска одного или нескольких компонентов отработавших газов, включая, помимо прочих, необходимый анализируемый компонент (например, О2), для диффузии во внутреннюю полость 222 с интенсивностью, ограниченной по сравнению с той, с которой анализируемый компонент могут накачивать внутрь или выкачивать наружу пара электродов 212 и 214 накачки. Таким образом, в первой внутренней полости 222 можно получить стехиометрическое содержание О2.
Датчик 200 также содержит вторую внутреннюю полость 224 в пределах слоя 204, отделенную от первой внутренней полости 222 слоем 203. Вторая внутренняя полость 224 выполнена с возможностью поддержания постоянного парциального давления кислорода, соответствующего стехиометрическому составу смеси, например, содержание кислорода во второй внутренней полости 224 равно тому, которое присутствовало бы в отработавших газах, если бы воздушно-топливное отношение было стехиометрическим. Наличие стехиометрического уровня определяют по выходному напряжению элемента. Концентрацию кислорода во второй внутренней полости 224 поддерживают постоянной с помощью напряжения накачки Vp. В данном случае вторую внутреннюю полость 224 можно рассматривать как эталонный элемент. Ток накачки пропорционален коэффициенту избытка топлива, пропорциональному парциальному давлению кислорода.
Пара измерительных электродов 216 и 218 расположена с возможностью связи с первой внутренней полостью 222 и эталонным элементом 224. Пара измерительных электродов 216 и 218 обнаруживает градиент концентрации, могущий образоваться между первой внутренней полостью 222 и эталонным элементом 224 из-за того, что концентрация кислорода в отработавших газах превышает стехиометрический уровень или находится ниже его. Причиной высокой концентрации кислорода может быть бедный состав смеси отработавших газов, а низкой концентрации кислорода -богатый состав смеси.
Пара электродов 212 и 214 накачки расположена с возможностью связи с внутренней полостью 222 и выполнена с возможностью электрохимического выкачивания того или иного компонента газа (например, О2) из внутренней полости 222 через слой 201 и за пределы датчика 200. Или же пара электродов 212 и 214 накачки могут быть выполнены с возможностью электрохимической накачки выбранного газа через слой 201 во внутреннюю полость 222. В этом случае пара электродов накачки 212 и 214 может рассматриваться как элемент накачки О2.
Электроды 212, 214, 216 и 218 могут быть выполнены из различных подходящих материалов. В некоторых вариантах электроды 212, 214, 216 и 218 могут быть выполнены как минимум частично из материала, катализирующего диссоциацию молекулярного кислорода. Неограничивающими примерами таких материалов могут служить электроды, содержащие платину и/или серебро.
Процесс электрохимической накачки кислорода из внутренней полости 222 или в нее включает в себя подачу напряжения Vp (например, опорного напряжения) на пару электродов 212 и 214 накачки. Напряжение накачки Vp, поданное на элемент накачки 02, накачивает кислород в первую внутреннюю полость 222 или из нее для поддержания стехиометрического содержания кислорода в полости. Возникающий при этом ток накачки Ip пропорционален концентрации кислорода в оцениваемом заряде (отработавших газов, если датчик представляет собой датчик отработавших газов, или всасываемого воздуха, если датчик представляет собой датчик кислорода во всасываемом воздухе). Система управления (не показана на ФИГ. 2) генерирует сигнал тока накачки Ip в зависимости от величины подаваемого напряжения накачки Vp, необходимой для поддержания стехиометрического уровня в первой внутренней полости 222. Таким образом, если смесь является бедной, то будет происходить выкачивание кислорода из внутренней полости 222, а если смесь является богатой -накачивание кислорода во внутреннюю полость 222.
Следует понимать, что датчик кислорода, раскрытый в настоящей заявке, является не более чем примером осуществления датчика кислорода во всасываемом воздухе, и то, что другие варианты осуществления датчика кислорода во всасываемом воздухе могут иметь дополнительные и/или другие признаки и/или конструктивные исполнения.
Кроме того, датчик кислорода на ФИГ. 2 можно эксплуатировать как датчик кислорода переменного напряжения, выполненный с возможностью работы при первом, относительно низком, напряжении (например, первом опорном напряжении), при котором диссоциация молекул воды не происходит, и втором, относительно высоком, напряжении (например, втором опорном напряжении), при котором происходит полная диссоциация молекул воды. Второе напряжение выше первого напряжения.
Как раскрыто ниже, датчик кислорода на ФИГ. 2 можно с успехом использовать для регулирования подачи топлива и крутящего момента. В частности, датчик кислорода выполнен с возможностью оценки чистого содержания кислорода в заряде воздуха без необходимости введения поправки на разбавители, например, влагу, газы РОГ, углеводороды от продувки и ПВК. Поэтому, в соответствии с показанием датчика кислорода можно непосредственно оценивать заряд воздуха в относительно широком диапазоне условий работы двигателя, в том числе, когда имеет место поток РОГ, поток паров от ПВК, и/или происходит продувка. Отсутствие необходимости введения поправки на концентрацию разбавителей при регулировании подачи топлива позволяет уменьшить погрешности подачи топлива, вызванные погрешностями оценки содержания топливных разбавителей, и повысить точность подачи топлива. Кроме того, одновременно можно выполнять определение адаптивной поправки по топливу (например, определение погрешностей топливных форсунок). Поскольку это позволяет определить чистый расход подачи кислорода в цилиндры, датчик кислорода можно применять по существу как датчик ДВК. Кроме того, по значению концентрации кислорода, определенному в соответствии с показанием датчика кислорода, можно подтверждать, корректировать или заменять значение давления заряда воздуха в коллекторе, определенное специально предназначенным для этого датчиком ДВК двигателя (например, датчиком 122 на ФИГ. 1).
Следующее верно для условий, когда продувка топливных паров и вентиляция картера выключены:
IAO2_based_MAP = IAO2_sensed_oxygen_partial_pressure / 21 кПА,
где IAO2_based_MAP - давление заряда воздуха в коллекторе или концентрация кислорода, определенные в соответствии с показанием датчика кислорода, а IAO2_sensed_oxygen_partial_pressure - нескорректированное показание датчика кислорода.
Датчик кислорода во всасываемом воздухе (например, датчик кислорода во всасываемом воздухе на ФИГ. 2 и/или линейный датчик 172 кислорода на ФИГ. 1) также функционирует как традиционный датчик кислорода при первом, относительном низком, опорном напряжении (например, около 450 мВ). Данное относительно низкое напряжение в настоящем описании может именоваться «базовое опорное напряжение». Иначе говоря, линейный датчик кислорода выполнен с возможностью работы как датчик кислорода для определения воздушно-топливного отношения сжигаемой смеси.
Кроме того, датчик кислорода во всасываемом воздухе выполнен с возможностью оценки влажности окружающей среды при работе в режиме переменного напряжения ПН (VVs). В режиме ПН опорное напряжение датчика кислорода повышают с относительно низкого базового напряжения (например, около 450 мВ, в настоящем описании также именуемого «номинальные условия») до относительно высокого целевого напряжения (например, в диапазоне 900-1100 мВ). В некоторых примерах относительно высокое целевое напряжение может представлять собой напряжение, при котором происходит частичная или полная диссоциация молекул воды на датчике кислорода, при этом базовое напряжение может представлять собой напряжение, при котором не происходит диссоциация молекул воды на датчике.
Обратимся к ФИГ. 3: блок-схема 300 схематически иллюстрирует процесс расчета массы воздуха с помощью датчика кислорода во всасываемом воздухе для регулирования подачи топлива и оценки крутящего момента. Данная фигура представляет собой описание одного варианта алгоритма на ФИГ. 3. Авторы настоящего изобретения выявили, что результат оценки заряда воздуха по чистому содержанию кислорода, измеренному датчиком кислорода во всасываемом воздухе, является корректным для регулирования подачи топлива. При этом на данный результат оценки влияют разбавители и топливные углеводороды, участвующие в сгорании в цилиндре, и, тем самым, в создании крутящего момента. Поэтому данный (нескорректированный) результат оценки заряда воздуха не является корректным для оценки крутящего момента. Для преодоления этих недостатков, для регулирования подачи топлива используют заряд воздуха, в основе которого лежит чистое содержание кислорода во всасываемом воздухе. Массу воздуха корректируют с поправкой на изменение содержания кислорода из-за присутствия разбавителей, и скорректированное значение используют для регулирования-крутящего момента, как раскрыто ниже. Следует понимать, что алгоритм на ФИГ. 3 можно выполнять в условиях наличия потока разбавителей на впуск двигателя, например, наличия потоков рециркуляции отработавших газов (EGR), и/или топливных паров от продувки (в настоящем описании также именуемого «поток от продувки»), и/или топливных паров от принудительной вентиляции картера (в настоящем описании также именуемого «поток от ПВК»).
На шаге 302 поступает показание датчика кислорода во всасываемом воздухе (O2BB), соединенного с заборным каналом двигателя. Оно представляет собой нескорректированное показание датчика кислорода во всасываемом воздухе, отражающее чистое содержание кислорода во всасываемом воздухе (Чистое_O2). В одном примере показание датчика кислорода во всасываемом воздухе представляет собой ток накачки, генерируемый в результате подачи опорного напряжения на датчик. Опорное напряжение представляет собой напряжение, при котором не происходит диссоциация молекул воды на датчике, например, 450 мВ. Показание датчика поступает в контроллер К1, рассчитывающий массу воздуха для регулирования подачи топлива по нескорректированному показанию датчика. В частности, по результату измерения чистого содержания кислорода датчиком O2BB определяют эквивалентный заряд воздуха со стандартной концентрацией кислорода (Станд_O2 = 20.92%). В контроллер К1 также может поступать входное значение массы 304 воздуха (Масса_воздуха) от того или иного датчика, например, массового расхода воздуха от датчика МРВ. Контроллер К1 может рассчитать массу воздуха для регулирования подачи топлива (цилиндр_Масса_воздуха_для_регул_топл) как: Цилиндр_Масса_воздуха_для_регул_топл = цилиндр_Масса_воздуха * (Чистое_О2 / Станд_О2).
Результат расчета массы воздуха для регулирования подачи топлива может быть введен в контроллер К2 для определения массы впрыскиваемого топлива (масса_впр_топл). В частности, можно рассчитать массу впрыскиваемого топлива для регулирования подачи топлива в двигатель для обеспечения номинального воздушно-топливного отношения (номинал_возд_топл_отн, например, стехиометрического). Массу впрыскиваемого топлива можно определить как: масса_впр_топл = цилиндр_Масса_воздуха_для_регул_топл / номинал_возд_топл_отн.
Таким образом, подачу топлива в двигатель регулируют без учета разбавителей, по нескорректированному показанию датчика кислорода во всасываемом воздухе. В одном примере это составляет упреждающую часть регулирования подачи топлива в двигатель. В контроллер К2 также могут поступать данные обратной связи о погрешностях подачи топлива по результатам определения адаптивной поправки по топливу. Например, по данным обратной связи от датчика воздушно-топливного отношения в отработавших газах контроллер может определить погрешность, относимую к погрешности впрыска (также именуемой «погрешность дозирования топлива»). По результату определения погрешности можно обновить массу впрыскиваемого топлива. Иначе говоря, контроллер оценивает заряд воздуха в цилиндр в соответствии с показанием датчика кислорода во всасываемом воздухе, без внесения поправки на разбавители, а затем оценивает подачу топлива в двигатель по результату оценки заряда воздуха. Погрешности подачи топлива, определенные в соответствии с раскрываемым решением, включают в себя погрешности подачи топлива из-за погрешностей расхода через топливную форсунку и погрешности, связанные с расчетом заряда воздуха способами с использованием плотности N или датчиков МРВ. При этом погрешности подачи топлива, связанные с погрешностями из-за разбавителей, например, влаги и газов РОГ, и погрешности, связанные с углеводородами, например топливными парами от ПВК и продувки, не учитывают. Применение датчика кислорода во всасываемом воздухе устраняет данные погрешности из-за разбавителей и углеводородов.
Контроллер также может определять адаптивную поправку по топливу в условиях наличия потоков разбавителей в соответствии с показанием датчика кислорода в отработавших газах, соединенному с выпускным каналом двигателя. В частности, результат расчета массы заряда воздуха в цилиндр для регулирования подачи топлива (выданный контроллером К1) может быть введен в адаптивный контроллер топлива {Адаптивный_контр_топл), генерирующий соответствующий поправочный коэффициент для топлива (Поправочный_коэфф_топл). Таким образом, результатом определения адаптивной поправки является полученная функция (например, таблица, вектор или скаляр), исправляющая погрешности оценки заряда воздуха или дозирования топлива. В одном примере полученная функция представляет собой множитель. В еще одном примере полученная функция представляет собой слагаемое суммы. В известных из уровня техники решениях для определения адаптивной поправки было трудно разграничить указанные две погрешности, поэтому для удобства известные решения обычно относили погрешность к области дозирования топлива. Поскольку датчик кислорода во всасываемом воздухе указывает чистое парциальное давление кислорода, по результату оценки заряда воздуха, в основе которого оно лежит, можно достоверно оценивать адаптивную поправку по топливу, так как показание датчика становится нечувствительным к расходу паров от вентиляции картера или от продувки топливных паров. В частности, благодаря точному измерению углеводородов, поступающих из продувочной системы, датчиком кислорода во всасываемом воздухе, и измерению чистого содержания кислорода, поступающего в двигатель, стратегия определения адаптивной поправки по топливу может быть реализована даже в условиях наличия потока от продувки.
В одном примере поправку по топливу можно определять адаптивно по разности ожидаемого изменения воздушно-топливного отношения, обусловленного длительностью импульса, заданной для топливной форсунки, и фактического изменения воздушно-топливного отношения, оцененного датчиком отработавших газов. В этом случае величину подачи топлива в двигатель корректируют в зависимости от показания датчика кислорода во всасываемом воздухе. Затем контроллер может изменить длительность импульса, заданную для топливной форсунки, в зависимости от результата определения величины впрыска топлива. В этом состоит часть алгоритма 300, относящаяся к регулированию подачи топлива в двигатель.
Следует понимать, что, в дополнение к определению адаптивной поправки по топливу, контроллер может определить погрешности одного или нескольких компонентов двигателя в условиях наличия потока одного или нескольких разбавителей в двигатель. В их число может входить, например, погрешность датчика расхода воздуха через впускной коллектор, например, датчика, используемого для оценки массы воздуха Масса_воздуха. Если таковая будет определена, массу воздуха Масса_воздуха 304 можно скорректировать с учетом определенной погрешности с последующим вводом скорректированной массы воздуха Масса_воздуха в контроллер К1 (и К5, как раскрыто ниже).
Перейдем к части алгоритма 300, относящейся к регулированию крутящего момента: сначала определяют изменение содержания кислорода из-за каждого из разбавителей, присутствующих во всасываемом воздухе. В настоящем примере раскрыты два разбавителя 306, 308, при этом следует понимать, что различные дополнительные разбавители можно учитывать аналогичным образом. В одном примере первый разбавитель представляет собой газы РОГ, при этом концентрацию первого разбавителя (Разбавитель_1) измеряют с помощью дифференциального датчика давления способами обратной связи по перепаду давления ОСПД (DPFE) или перепаду давления на клапане ПДНК (DPOV). В еще одном примере второй разбавитель представляет собой влагу, при этом концентрацию второго разбавителя (Разбавитель_2) измеряют специальным датчиком влажности или с помощью датчика кислорода в отработавших газах, работающего в режиме переменного напряжения. Следует понимать, что могут присутствовать и другие разбавители, концентрацию которых можно измерять подходящими способами.
Концентрации каждого из разбавителей оценивают и вводят в контроллер (контроллеры К3 и К4) для оценки изменения содержания кислорода во всасываемом воздухе из-за разбавителей (Дельта_О2_раз6авитель_1 и Дельта_О2_разбавитель_2). Например, концентрацию первого разбавителя Разбавитель_1 вводят в контроллер К3 для оценки Дельта_О2_разбавитель_1, а концентрацию второго разбавителя Разбавитель_2 вводят в контроллер К4 для оценки Дельта_О2_разбавитель_2. Изменения концентрации кислорода из-за каждого из разбавителей можно определить как:
Дельта_О2_разбавитель_1 = Разбавитель_1_концентрация * разбавитель_1_к_О2_коэфф и
Дельта_О2_разбавитель_2_концентрация = Разбавитель_2 * разбавитель_2_к_О2_коэфф,
где разбавитель_1_к_О2_коэфф и разбавитель_2_к_О2_коэфф определяют как молярное процентное содержание кислорода на моль разбавителя для разбавитель_1 и разбавитель_2. Затем изменения содержания кислорода из-за каждого разбавителя суммируют и сравнивают с базовым содержанием кислорода в сухом воздухе (Базовое_О2). Полученную разность вводят в контроллер К5 для определения массы воздуха для оценки крутящего момента. Результат оценки представляет собой полную массу воздуха за вычетом веществ, не являющихся воздухом. Контроллер К5 определяет массу воздуха в заряде воздуха в цилиндр для оценки крутящего момента (цилиндр_Масса_воздуха_для_оц_крм) по совокупному влиянию разбавителей и по массе воздуха (или массовому расходу воздуха, Масса_воздуха), оцененной датчиком МРВ на шаге 304. В частности, контроллер корректирует показание датчика кислорода во всасываемом воздухе на присутствие разбавителей путем уменьшения показания датчика кислорода во всасываемом воздухе на концентрацию разбавителей (согласно оценке с помощью датчиков разбавителей). Затем контроллер К5 может определить массу воздуха для оценки крутящего момента как:
Цилиндр_Масса_воздуха_для_оц_крм = цилиндр_Масса_воздуха - О2_разбавитель_1_масса - О2_разбавитель_2_масса
Скорректировав показание датчика кислорода во всасываемом воздухе на разбавители, контроллер может отрегулировать исполнительное устройство двигателя в зависимости от результата оценки крутящего момента цилиндра в соответствии со скорректированным показанием (заряда воздуха). Например, контроллер может изменить положение впускного дросселя, соединенного с заборным каналом двигателя, в зависимости от результата определения массы воздуха для оценки крутящего момента для регулирования крутящего момента двигателя. В еще одном примере контроллер может изменить положение клапана РОГ, соединенного с магистралью РОГ, для регулирования крутящего момента. В других примерах контроллер может изменить момент искрового зажигания и/или график переключения передач в трансмиссии. Величину впрыска воды также можно скорректировать на разбавители.
Иначе говоря, после оценки содержания кислорода датчиком кислорода во всасываемом воздухе, парциальное давление кислорода после уравновешивания используют при регулировании воздушно-топливного отношения, а парциальное давление кислорода до уравновешивания используют для оценки крутящего момента. Решение Заявителя относится к способу корректировки результата оценки "после уравновешивания" для определения результата оценки "до уравновешивания".
Таким образом, в условиях наличия потока одного или нескольких разбавителей в двигатель, контроллер двигателя может регулировать подачу топлива в двигатель в зависимости от показания датчика кислорода во всасываемом воздухе без учета разбавителей и определять адаптивную поправку по топливу. Использование нескорректированного показания датчика кислорода для регулирования подачи топлива в двигатель позволяет применять датчик кислорода во всасываемом воздухе для достоверной оценки заряда воздуха для функции регулирования подачи топлива. При этом, использование скорректированного на разбавители показания датчика кислорода для регулирования крутящего момента двигателя позволяет определить величину заряда воздуха для оценки крутящего момента с одновременным устранением влияния топливных углеводородов. Это повышает точность определения крутящего момента, что позволяет улучшить управляемость транспортного средства, повысить эффективность планирования переключения передач в трансмиссии и регулирования крутящего момента при переключении передач в трансмиссии.
Следует понимать, что если бы датчик кислорода во всасываемом воздухе представлял собой не-каталитический датчик кислорода, он бы выдавал показание парциального давления кислорода (и любого окислителя) до уравновешивания. В этом случае, результат оценки заряда воздуха по показанию датчика был бы корректен для расчета крутящего момента.
Обратимся к ФИГ. 4, иллюстрирующей пример способа 400 для эксплуатации датчика кислорода во всасываемом воздухе для точного регулирования подачи топлива и крутящего момента двигателя даже в присутствии потока разбавителя. Способ обеспечивает возможность достоверной оценки заряда всасываемого воздуха в относительно широком диапазоне рабочих условий без необходимости блокирования потоков от продувки, ПВК или РОГ. Кроме того, одновременно можно выполнять определение адаптивной поправки на погрешности компонентов.
На шаге 402 способ предусматривает оценку и/или измерение параметров работы двигателя, например, частоты его вращения, ДВК, МРВ, барометрического давления, температуры двигателя, температуры отработавших газов, РОГ и т.п. На шаге 404 можно проверить наличие потока какого-либо разбавителя во впускной коллектор. В частности, можно проверить наличие потоков РОГ, и/или топливных паров от продувки, и/или топливных паров от вентиляции картера в заборный канал. То есть способ 400 позволяет достоверно оценивать заряд воздуха даже в условиях наличия потока какого-либо углеводорода-разбавителя на впуск двигателя. В одном примере, в условиях частоты вращения/нагрузки двигателя от низких до средних, можно осуществлять РОГ для повышения топливной экономичности и снижения выбросов NOx. В качестве другого примера, поток топливных паров от продувки может быть направлен на впуск в связи с превышением пороговой нагрузки двигателя и заполнением адсорбера топливной системы. В качестве еще одного примера, поток топливных паров от вентиляции картера можно ситуативно направлять на впуск двигателя во время его работы.
Если наличие потока разбавителя будет подтверждено, на шаге 406 определяют концентрацию разбавителя. Например, в условиях наличия потока РОГ, можно определить концентрацию газов РОГ (или воздушно-топливное отношение в газах РОГ) с помощью датчика РОГ, выполненного как дифференциальный датчик давления (например, способами ПДНК или ОСПД). В качестве другого примера, при наличии потоков паров от продувки или ПВК, концентрации разбавителей можно оценивать по изменениям показаний датчика воздушно-топливного отношения в отработавших газах (например, изменениям относительно номинального воздушно-топливного отношения).
Определив концентрацию разбавителя, способ переходит на шаг 408. Если на шаге 404 наличие потока какого-либо разбавителя не будет подтверждено, способ переходит на шаг 405 для определения концентрации влаги во всасываемом воздухе. В одном примере влажность всасываемого воздуха оценивают по показанию датчика влажности. В еще одном примере влажность всасываемого воздуха может быть уже определена в соответствии с показанием датчика кислорода во всасываемом воздухе, работающего в режиме переменного напряжения в условиях без подачи топлива. Затем способ переходит на шаг 408.
На шаге 408 способ предусматривает оценку содержания кислорода во всасываемом воздухе с помощью датчика кислорода во всасываемом воздухе. А именно, контроллер может снимать показания датчика кислорода с равным временным шагом и присваивать каждому снятому показанию метку угла поворота коленчатого вала двигателя на момент снятия. Затем снятые показания могут быть сохранены в буфере. Снятие по времени, присвоение меток угла поворота коленчатого вала и буферизация снятых показаний датчика кислорода подробнее раскрыты на примере ФИГ. 5.
Далее, на шаге 410, можно проверить, была ли запрошена оценка топлива и/или крутящего момента. В одном примере запрос оценки топлива и крутящего момента может происходить один раз за период сгорания/событие. В еще одном примере оценка топлива и крутящего момента может быть запрошена для регулирования подачи топлива и крутящего момента двигателя. Если оценка топлива и/или крутящего момента не запрошена, на шаге 411 не выполняют оценку заряда воздуха в соответствии с показанием датчика кислорода и способ переходит обратно на шаг 408 для возобновления снятия показаний датчика кислорода во всасываемом воздухе с заданными равными временными шагами. Контроллер также может продолжить присвоение меток угла поворота коленчатого вала снятым показаниям и сохранение снятых показаний в буфере.
На шаге 412 способ предусматривает выбор одного или нескольких снятых показаний из множества снятых показаний, сохраненных в буфере, и обработку выбранных снятых показаний для определения результата оценки заряда воздуха для регулирования подачи топлива и крутящего момента. В контексте настоящего раскрытия «оценка заряда воздуха во впускном коллекторе» включает в себя оценку чистого расхода подачи кислорода в цилиндры двигателя. Как подробно раскрыто на примере ФИГ. 5, это включает в себя ретроспективный поиск снятых показаний, соответствующих прошлому периоду сгорания, и использование этих снятых показаний для оценки заряда воздуха.
Использование показания датчика кислорода для оценки топлива и крутящего момента включает в себя, на шаге 414, использование неисправленного/нескорректированного показания датчика кислорода для оценки массы заряда воздуха для регулирования подачи топлива, как подробно раскрыто на примере ФИГ. 3. Далее, на шаге 416, способ предусматривает использование исправленного/скорректированного на разбавители показания датчика кислорода для оценки массы заряда воздуха для регулирования крутящего момента. Это включает в себя уменьшение нескорректированного показания датчика кислорода во всасываемом воздухе на коэффициент, в основе которого лежит концентрация топливных паров, поступивших на впуск от РОГ, продувки и/или вентиляции картера.
Способ с использованием датчика кислорода во всасываемом воздухе (О2ВВ) может быть особенно полезен в системах с впрыском газообразного топлива (например, СПГ) в двигатель выше по потоку от дросселя или выше по потоку от компрессора (впрыском во впускные каналы) с одновременным впрыском некоторого количества таких топлив, как бензин или дизельное топливо, поскольку газообразное топливо может вытеснять (то есть разбавлять) гораздо большую часть воздуха, чем жидкое топливо, впрыскиваемое во впускные каналы. Таким образом, применение датчика кислорода во всасываемом воздухе в качестве основного датчик заряда воздуха устраняет чувствительность регулирования подачи топлива в двигатель к погрешностям подачи топлива, обусловленным присутствием различных разбавителей (например, углеводородных топливных паров). В частности, величина подачи топлива, оцениваемая по заряду воздуха, представляет собой величину подачи топлива, которое еще не было впрыснуто (и, следовательно, должно быть впрыснуто). Какое-либо топливо, которое уже впрыскивали (то есть представляющее собой разбавители и углеводородные пары), не учитывают при оценке заряда воздуха для регулирования подачи топлива, поскольку его не нужно добавлять. Наличие известного значения расхода потока кислорода в цилиндры двигателя позволяет снизить погрешности подачи топлива, вызванные погрешностями в определении содержания газов РОГ, влаги, паров от продувки и ПВК, и других разбавителей или углеводородов и, тем самым, значительно повысить точность регулирования подачи топлива.
На шаге 418 способ предусматривает определение адаптивной поправки по топливу по данным обратной связи от датчика воздушно-топливного отношения, например, датчика воздушно-топливного отношения в отработавших газах. Например, контроллер может определить погрешность форсунки по отклонению результата оценки воздушно-топливного отношения от ожидаемого воздушно-топливного отношения. Например, погрешность воздушно-топливного отношения по результатам измерения УДКОГ может включать в себя погрешность топливной форсунки и погрешность определения расхода воздуха по плотности N или с помощью датчика МРВ. Определение адаптивной поправки также можно выполнять в условиях поступления углеводородов от РОГ, и/или продувки, и/или ПВК во всасываемый воздух. Например, можно выполнить подстройку топливной системы во время продувки адсорбера с учетом того, что при использовании датчика кислорода во всасываемом воздухе пары от продувки адсорбера начинают создавать сигнал, а не шум.
По существу, член адаптивной поправки по топливу может представлять собой интегральный член, который прибавляют к значению необходимой массы топлива (или, в некоторых случаях, умножают это значение на него) для приведения фактического коэффициента избытка топлива в отработавших газах к необходимому значению (например, к 1,000, являющемуся стехиометрическим). Интегральный член может зависеть от конкретных условий. Например, в число таких условий могут входить: частота вращения двигателя, длительность импульса впрыска топлива, масса цилиндра, нагрузка двигателя и расход воздуха. Таким образом, в одном примере для относительно высоких расходов воздуха можно применять один интегральный член, а для относительно низких - другой. Таким образом, погрешность подачи топлива может отражать погрешность топливной форсунки и погрешность оценки расхода воздуха.
На шаге 420 способ предусматривает изменение одного из параметров работы двигателя в зависимости от результата оценки заряда воздуха и определенных погрешностей. Это включает в себя регулирование подачи топлива в двигатель с учетом определенной погрешности топливной форсунки, а также регулирование исполнительного устройства создания крутящего момента двигателя с учетом определенной погрешности датчика расхода воздуха. Например, контроллер может отрегулировать массу впрыскиваемого топлива на предстоящий период сгорания в зависимости от результата оценки заряда воздуха и погрешности топливной форсунки. Это включает в себя упреждающее регулирование массы впрыскиваемого топлива в зависимости от результата оценки заряда воздуха для достижения стехиометрического соотношения в цилиндре (то есть массы воздуха для оценки количества топлива, определенной по нескорректированному показанию датчика кислорода во всасываемом воздухе) и регулирование массы впрыскиваемого топлива по обратной связи, т.е. в зависимости от определенной погрешности форсунки. Затем регулируют длительность импульса впрыска топлива для обеспечения соответствия результату определения массы впрыскиваемого топлива. Затем осуществляют подачу необходимого количества топлива путем включения топливной форсунку на время, необходимое для подачи данного количества топлива с учетом его температуры и давления. Необходимое время включения обеспечивают путем регулирования длительности импульса электрического сигнала, приводящего в действие топливную форсунку.
Контроллер также может изменить один или несколько параметров работы двигателя в зависимости от результата оценки заряда воздуха для регулирования крутящего момента. Например, контроллер может изменить проход дросселя на предстоящий период сгорания в зависимости от результата оценки заряда воздуха и погрешности МРВ. Это включает в себя определение упреждающего положения дросселя в зависимости от результата оценки заряда воздуха (то есть массы воздуха для оценки крутящего момента, определенной по скорректированному на разбавители показанию датчика кислорода во всасываемом воздухе) и регулирование положение дросселя с обратной связью в зависимости от погрешности МРВ. В число других параметров работы двигателя, которые также можно изменить, входят положение клапана РОГ, фазы газораспределения впускных и/или выпускных клапанов, давление наддува или другие подходящие параметры. Дополнительно можно отрегулировать величину впрыска воды для изменения количества воды, используемой как разбавитель.
Таким образом, в условиях наличия потока топливных паров из продуваемого адсорбера, картера и/или магистрали РОГ на впуск двигателя, подачу топлива в двигатель регулируют в зависимости от нескорректированного показания датчика кислорода во всасываемом воздухе, а исполнительное устройство создания крутящего момента регулируют в зависимости от скорректированного показания датчика кислорода во всасываемом воздухе, при этом указанное показание скорректировано в зависимости от концентрации топливных паров. Это позволяет нивелировать погрешности в части топлива и крутящего момента, связанные с присутствие углеводородов и разбавителей во всасываемом воздухе. В частности, погрешности топливной системы можно достоверно отнести к погрешностям подачи топлива форсункой и оценки совокупного массового расхода воздуха.
Как раскрыто выше, система выполнена с возможностью более достоверной оценки заряда воздуха для каждого цилиндра по показаниям датчика кислорода во всасываемом воздухе, что позволяет применять датчик кислорода аналогично датчику ДВК. Одно известное решение для обработки сигнала ДВК предусматривает снятие показаний датчика с частотой, в два раза превышающей частоту зажигания в угловой области, с последующим определением результата оценки заряда воздуха по среднему значению двух снятых показаний. Это обусловлено необходимостью уменьшения пульсации давления от сигнала датчика. Однако такое решение может предусматривать снятие показаний датчика в строго определенные моменты, что делает данный процесс вычислительно затратным при применении стандартных механизмов подачи сигналов датчика, например, из-за возникновения перерыва. Снятие сигнала датчика в определенные моменты для каждого цилиндра в каждом рабочем цикле цилиндра подразумевает перерыв в работе контроллера и задействование ресурсов контроллера для непрерывного отслеживания положения двигателя. Данное решение может быть практически нецелесообразным и/или затратным. В принципе, снятие показаний датчика с определенным шагом по углу поворота коленчатого вала может обеспечить возможность определения ДВК в необходимые моменты (например, при закрытии впускного клапана ЗВК (IVC)). Данные углы измеряет датчик 118 на эффекте Холла, соединенный с коленчатым валом 40. При этом снятие показаний датчиков с шагом по углу поворота коленчатого вала может быть ресурсоемким и/или предрасположенным к погрешностям во время событий переходных режимов, например, когда растет частота вращения двигателя и, как следствие, частота вращения коленчатого вала. Надежный способ управления двигателем можно обеспечить за счет снятия и обработки показаний параметров работы двигателя с равным шагом по углу поворота коленчатого вала. Однако, поскольку данное решение является ресурсоемким, раскрываемое изобретение решает аналогичную задачу за счет того, что сначала осуществляют снятие (например, с интервалом в 1 миллисекунду), а затем обработку (например, с шагами 240° или 120° в 3-цилиндровом двигателе).
Снятие показаний датчика кислорода во всасываемом воздухе (в данном случае функционирующего как датчик ДВК) с равным временным шагом, например каждую миллисекунду, присвоение каждому снятому показанию метки соответствующего по времени угла поворота коленчатого вала, размещение указанных результатов в буфер данных с возможностью обращения к нему контроллера обеспечивает возможность осуществления контроллером операций с указанными данными и их эффективной обработки. Заряд воздуха можно вычислять по снятому показанию О2ВВ, обычно один раз за период сгорания (то есть один раз на каждый запрос подачи топлива). Перед тем, как рассчитать заряд воздуха до события впрыска топлива, контроллер может просмотреть метки угла в буфере в поисках метки угла или набора меток, идентифицирующих снятые показания, соответствующие прошлому периоду сгорания (то есть непосредственно предшествующему периоду сгорания), и использовать соответствующие показания датчика для вычисления заряда воздуха, как раскрыто на примерах ФИГ. 3-4. Затем по данному заряду воздуха можно вычислить величину впрыска топлива. В некоторых примерах, после выполнения расчета впрыска топлива буфер может быть очищен для приема следующего пакета помеченных по углу показаний датчика О2ВВ. В других примерах буфер может представлять собой буфер обратного магазинного типа, в котором каждое новое снятое показание (или набор снятых показаний) заменяет самое давнее снятое показание в буфере. Емкость данного буфера может зависеть от минимальной частоты вращения двигателя, при которой прогнозируют работу системы. Чем ниже частота вращения двигателя, тем большее число помеченных по углу сигналов давления должен хранить буфер. В одном конкретном примере, для обеспечения возможности раскрытого выше снятия и сохранения снятых сигналов О2ВВ с интервалом 1 миллисекунда при минимальной частоте вращения двигателя 450 об./мин, емкость буфера может составлять 267 снятых показаний (например, для сохранения каждого снятого показания, отобранного за рабочий цикл двигателя, включающий в себя два оборота коленчатого вала). Емкость буфера может быть меньше в соответствующей пропорции, если нужна только часть снятых показаний за полный рабочий цикл двигателя. Например, если нужны снятые показания только для одного события в цилиндре четырехцилиндрового двигателя при 450 об./мин, число необходимых снятых показаний составит только 67 (60/450/2 = 67).
Аналогичным образом, при меньшей частоте снятия число необходимых снятых показаний будет меньше.
Раскрытый выше метод расчета заряда воздуха можно применять для двигателя, в котором осуществляют непосредственный впрыск жидкого топлива обычно после закрытия впускного клапана и/или впрыск газообразного топлива во впускные каналы до закрытия впускного клапана. По результату оценки заряда воздуха можно вычислить коэффициент избытка топлива (также именуемый «фи») целевого топливовоздушного заряда. Целевой топливовоздушный заряд можно сравнить с фактическим топливовоздушным зарядом, определенным по показанию датчика отработавших газов, например универсального датчика кислорода в отработавших газах (УДКОГ). В дальнейшем подачу топлива можно корректировать в зависимости от результатов сравнения целевого фи с результатом определения фи по показанию УДКОГ. Поскольку в двигателях с непосредственным впрыском порцию топлива обычно впрыскивают после закрытия впускного клапана, импульсы впрыска топлива после закрытия впускного клапана позволяют регулировать фи с относительно высокой точностью дозирования заряда воздуха.
Обратимся к ФИГ. 5, на которой раскрыт способ снятия, обработки и буферизации снятых показаний, отобранных на датчике О2ВВ и используемых для оценки заряда воздуха. Следует понимать, что раскрытые ниже снятие, сохранение и обработку выполняют в условиях наличия потока разбавителя на впуск двигателя, например, во время рециркуляции отработавших газов из выпускного канала в заборный канал двигателя.
Для решения проблемы шума датчика обычно применяют аналоговый фильтр для сглаживания сигнала и снимают этот сигнал с возможной дополнительной цифровой фильтрацией снятого сигнала. В результате обычно получают одно показание УДКОГ для контрольного периода. Как подробно раскрыто в настоящем описании, снятие сигнала при высокой частоте (например, 1000 Гц), буферизация сигнала и последующая обработка буферизованных данных при относительно низкой частоте (относительно длительный период) позволяет достичь более высокого качества сигнала, чем в случае снятия только при относительно низкой частоте. Один пример включает в себя вычисление среднего значения снятых показаний датчика кислорода за период углового перемещения, равного 180°, в 4-цилиндровом двигателе. Это обеспечивает возможность исключения почти всего шума, относящегося к событиям сгорания/впуска/выпуска в двигателе. Еще один пример способа предусматривает выбор конкретного угла, при котором используют сигнал датчика кислорода, например, в момент закрытия впускного клапана (ЗВК).
На шаге 502 способ 500 предусматривает снятие показаний датчика кислорода во всасываемом воздухе (О2ВВ) с равным временным шагом. Один пример такого снятия раскрыт на ФИГ. 6 и 7. В одном варианте осуществления может быть задана частота снятия показаний датчика О2ВВ, равная одному показанию датчика за миллисекунду. В еще одном варианте осуществления частота снятия показаний может быть задана с интервалами пять миллисекунд. В еще одном примере снятие можно выполнять при 1000 Гц. В других вариантах осуществления частота снятия может быть другой, или может быть предусмотрена возможность ее изменения в заданном диапазоне частот снятия. Следует понимать, что снятие сигнала необязательно выполнять синхронно частоте вращения двигателя. Снятие с фиксированным временным шагом позволяет выполнять его с низкими затратами вычислительных ресурсов, например, с помощью драйверов низкого уровня в контроллере двигателя, одновременно с основными событиями обработки данных в контроллере двигателя. Кроме того, снижена необходимость синхронных перерывов работы процессора. Кроме того, частота снятия с временным шагом позволяет снизить высшие гармоники частоты зажигания.
На шаге 504 способ предусматривает присвоение каждому снятому показанию метки угла поворота коленчатого вала двигателя на момент снятия. Угол поворота коленчатого вала можно измерять с помощью датчика на эффекте Холла (например, датчика 118 на ФИГ. 1). По значению угла присваивают метку сигналу датчика О2ВВ. Связь между событиями снятия и одновременным определением соответствующего угла поворота коленчатого вала представлена на ФИГ. 6, которая будет подробнее описана ниже. В некоторых примерах снятие сигналов О2ВВ с незамедлительным присвоением им меток соответствующих углов поворота происходит в течение всего времени работы двигателя. Кроме того, снятие и присвоение меток осуществляют без учета присутствия разбавителей (то есть независимо от того, текут ли газы РОГ, пары от продувки или ПВК на впуск двигателя). Следует отметить, что, несмотря на то, что снятие показаний датчика происходит через равные временные интервалы, частота определения углов поворота коленчатого вала зависит от частоты вращения двигателя. Когда двигатель работает с относительно высокими частотами, частота вращения коленчатого вала также относительно высока. Данные динамические характеристики представлены на ФИГ. 6 и 7, при этом для той или иной частоты снятия, промежуток между метками угла для следующих друг за другом снятых показаний изменяется в зависимости от частоты вращения двигателя (из-за изменений времени, затрачиваемого цилиндром на такт сжатия, при изменении частоты вращения двигателя). Снятие показаний датчика с равным временным шагом и присвоение меток угла снятым показаниям устраняет необходимость в перерывах, например, перерывах с интервалом, соответствующим углу величиной 1 градус или 6 градусов.
В некоторых примерах альтернативный вариант решения для определения угла поворота коленчатого вала, при котором снимают показание O2BB, состоит в том, что угол поворота коленчатого вала опосредованно определяют по углу поворота коленчатого вала текущего перерыва и известному значению текущей угловой скорости двигателя (например, частоты вращения двигателя). По существу, это является одним из способов присвоения меток приблизительных углов поворота коленчатого вала снятым показаниям O2BB вместо использования более достоверных значений углов, полученных путем определения положения двигателя с помощью датчика / экстраполяции.
На шаге 506 помеченные по углу сигналы O2BB сохраняют в буфере. Данный буфер может входить в состав запоминающего устройства контроллера или функционально (например, с возможностью связи) соединенного с ним компонента. Количество помеченных по углу снятых показаний, которые можно сохранить в данном буфере, зависит от частоты вращения двигателя. Как указано выше, чем выше частота вращения двигателя, тем быстрее будет происходить поворот коленчатого вала при каждом такте в цилиндре (соответствующем 180 градусам). Поскольку сигналы O2BB снимают с заранее заданным равным временным шагом, при высокой частоте вращения двигателя число помеченных по углу сигналов будет меньше, чем при низкой частоте вращения двигателя за то же смещение, равное 180-градусному углу поворота коленчатого вала. То есть емкость буфера может зависеть от нижней границы диапазона частот вращения во время работы двигателя или от минимальной частоты вращения, при которой необходимо обеспечивать раскрытое в настоящем описании снятие. Максимальное число помеченных по углу сигналов O2BB, которые можно хранить в буфере, может соответствовать указанной минимальной частоте вращения двигателя. Сохранение помеченных снятых показаний в буфере сокращает необходимость обработки каждого снятого показания и повышает совместимость процесса обработки сигнала с уже имеющимися компонентами блока управления силовым агрегатом БУСА (РСМ), предназначенными для снятия и обработки показаний.
Удаление данных, сохраненных в буфере, может происходить в соответствии с одним или несколькими протоколами очистки буфера. В одном варианте осуществления информация, относящаяся к новым помеченным по углу сигналам, будет поступать в буфер в начале очереди буфера, смещая самые ранние по времени сохраненные сигналы в конце очереди. В еще одном варианте осуществления буфер может быть очищен целиком по окончании выполнения последовательности работы цилиндров. В других вариантах осуществления, более ранние помеченные по углу сигналы датчика O2BB, относящиеся к двум или более предшествующим рабочим тактам, могут быть сохранены в памяти контроллера для получения более достоверного результата оценки заряда воздуха. Следует отметить, что в данном примере раскрыто применение одного буфера, при этом в других вариантах осуществления для каждого работающего цилиндра может быть выделен отдельный буфер.
На схеме 700 ФИГ. 7 представлен пример снятия и буферизации показаний датчика при двух разных частотах вращения двигателя. В одном примере снятые показания, относящиеся к относительно низкой частоте вращения двигателя, были сняты, когда двигатель работал на 600 об./мин, а снятые показания, относящиеся к относительно высокой частоте вращения двигателя, были сняты, когда двигатель работал на 6000 об./мин. В настоящем примере каждый график иллюстрирует то, как буферы выглядели бы при указанных двух разных частотах вращения двигателя, если бы происходило снятие синусоидального сигнала. Снятые показания обозначены незакрашенными кружками на синусоиде сигнала. Состояние буферов в моменты совершения шагов процесса снятия представлено на графиках «Снятие_1» (Sampling_1), «Снятие_2» (Sampling_2) и «Снятие_3» (Sampling_3). Из сравнения состояния любого буфера при указанных относительно высокой и относительно низкой частотах вращения двигателя можно заключить, что в тот или иной момент снятия число отобранных и сохраненных в буфере снятых показаний больше при относительно низкой частоте вращения двигателя, чем при относительно высокой частоте вращения двигателя.
На шаге 508 способ предусматривает проверку того, запрошена ли оценка заряда воздуха. Если оценка заряда воздуха не запрошена, способ 500 переходит обратно на шаг 502 для продолжения снятия сигналов O2BB с последующим присвоением им меток угла и сохранением в буфере, как раскрыто на шагах 504 и 506 соответственно. В одном примере оценка заряда воздуха может быть запрошена перед событием подачи топлива, например, один раз за период сгорания. Если на шаге 508 будет установлено, что оценка заряда воздуха запрошена, способ 500 переходит к запуску обработки соответствующих сигналов. Следует понимать, что, несмотря на то, что в настоящем примере обработку осуществляют в связи с запросом подачи топлива/запросом оценки заряда воздуха, в других примерах обработка помеченных и буферизованных сигналов O2BB может происходить через равные временные интервалы, например, один раз за период сгорания или через каждые 15 миллисекунд.
На шаге 509 способ предусматривает определение необходимого углового периода (буфера), из которого должны быть извлечены снятые показания. Необходимый угловой период можно выбирать таким образом, чтобы уменьшить периодический детонационный шум, поэтому он может варьироваться в зависимости от запрошенной на шаге 508 оценки. Необходимый угловой период может включать в себя необходимый диапазон углов. В настоящем примере, если запрошена оценка заряда воздуха, необходимый угловой период может соответствовать последним по времени (относительно момента запроса) 180 градусам в буфере. В еще одном примере необходимый угловой период может соответствовать последним по времени 720 градусам в буфере. В других примерах необходимый угловой период может представлять собой момент, соответствующий единственному углу поворота коленчатого вала, а не какой-либо диапазон моментов. В одном примере, относящемся к снятию и буферизации на ФИГ. 7, каждый буфер на схеме 700 изображает снятые показания (незакрашенные кружки), отобранные и сохраненные для 180-градусного периода.
На шаге 510 способ 500 предусматривает извлечение из буфера снятых показаний, соответствующих необходимому угловому периоду. Например, контроллер может извлечь два или более снятых показаний с определенной меткой угла поворота коленчатого вала. В качестве одного примера, контроллер может осуществить поиск в буфере и извлечь из него снятые показания, соответствующие последним 180 градусам с момента получения запроса оценки заряда воздуха. В зависимости от частоты вращения двигателя, число снятых показаний в буфере, соответствующих последним по времени 180 градусам, может быть разным (например, число снятых показаний может быть меньше для относительно высоких частот вращения двигателя и больше для относительно низких частот вращения двигателя), как разъяснялось на примере снятия и буферизации на ФИГ. 7. В указанном случае контроллер может определить помеченный по углу сигнал (сигналы) O2BB, соответствующий определенному углу поворота коленчатого вала, например, углу поворота коленчатого вала, совпадающему с первым из предшествующих периодов сгорания (например, последним по времени 180 градусам для 4-цилиндрового двигателя). В указанном случае, извлекают каждое снятое показание в буфере, соответствующее последним по времени 180 градусам, при этом их число может быть относительно большим, если частота вращения двигателя за последние по времени 180 градусов снятия была относительно низкой, и относительно малым, если частота вращения двигателя в указанные 180 градусов снятия была относительно высокой. Следует понимать, что в других примерах контроллер может осуществлять поиск в буфере и извлекать помеченные по углу снятые показания, соответствующие прошлому периоду, отстоящему от текущего на другое положительное целое число (n) рабочих циклов (например, за последнее количество n 180-градусных периодов для 4-цилиндрового двигателя, например, за 720 градусов). В других примерах контроллер может извлечь два или более снятых показаний, соответствующих частоте зажигания в угловой области. В еще одном примере указанные два или более обрабатываемых снятых сигнала выбирают однократно за период сгорания, при этом они включают в себя сигналы, соответствующие непосредственно предшествующему периоду сгорания. Или же контроллер может извлечь несколько снятых показаний, относящихся к каждому событию в цилиндре, и применять данные снятые показания для соответствующих событий в цилиндре. Кроме того, контроллер может извлечь единственное снятое показание за необходимый период, относящееся к конкретному событию в угле, например, к закрытию впускного клапана (ЗВК).
После того, как снятые показания будут выбраны, на шаге 512 способ предусматривает их обработку. Например, контроллер может определить среднее значение извлеченных снятых показаний, при этом контроллер усредняет снятые показания, относящиеся к одному предшествующему периоду сгорания. В результате получают среднее значение сигнала O2BB за последние по времени 180 градусов для 4-цилиндрового двигателя, о котором идет речь в вышеуказанном примере. В другом примере указанное среднее значение может представлять собой средневзвешенное или иное статистическое среднее значение. В других примерах контроллер может взять несколько снятых показаний для каждого события в цилиндре, вычислить среднее значение этих сигналов и использовать его для соответствующего события в цилиндре.
На шаге 514 обработанное снятое показание, например вычисленное среднее значение выбранных снятых показаний, можно использовать (непосредственно) для оценки заряда воздуха для регулирования подачи топлива. Другие варианты осуществления могут предусматривать экстраполяцию помеченных по углу сигналов O2BB, относящихся к периоду, отстоящему от текущего на два или более рабочих цикла, сохраненных в буфере, или интерполяцию по сохраненным в буфере помеченным по углу сигналам, отобранным в непосредственно предшествующем рабочем цикле, для оценки заряда всасываемого воздуха. Как раскрыто на примере ФИГ. 4, указанная оценка включает в себя определение массы воздуха, соответствующей результату указанного определения среднего значения, без коррекции на разбавители. Затем результат оценки заряда воздуха можно применять для регулирования подачи топлива. Кроме того, контроллер может скорректировать массу воздуха, соответствующую результату определения среднего значения, с поправкой на разбавители. Данный результат оценки заряда воздуха можно применять для регулирования крутящего момента.
Заряд воздуха можно оценивать, используя значение массы воздуха (или расхода воздуха через коллектор), оцененное по среднему значению показаний датчика, вместе со значением объема цилиндра, для определения массы газа, уловленного в цилиндре, по уравнению состояния идеального газа pV=nRT. Или же заряд воздуха можно оценивать с помощью таблиц, алгоритмов контроллера или иных алгоритмов, или других подходящих способов, устанавливающих соотношение массового расхода и заряда воздуха в цилиндр. Вычислив заряд воздуха, способ 500 следует на шаг 516 для изменения выбранного параметра работы двигателя. Данный параметр работы двигателя может представлять собой количество топлива, которое должно быть впрыснуто в камеру цилиндра, например, для достижения стехиометрического топливо-воздушного соотношения в камере сгорания. При этом можно изменить и другие параметры работы двигателя, например, положение клапана РОГ, фазы газораспределения впускных и/или выпускных клапанов, давление наддува или иной подходящий параметр.
Если параметр работы двигателя представляет собой количество топлива, которое должно быть впрыснуто в камеру цилиндра для создания необходимого крутящего момента при стехиометрическом воздушно-топливном соотношении сжигаемой в цилиндре смеси, массу воздуха и отработавших газов рециркуляции, поступающих в цилиндр, сначала рассчитывают с помощью указанного выше алгоритма расчета по частоте вращения и плотности. Затем вычисляют массу газов рециркуляции по перепаду давления на клапане РОГ и вычитают ее из массы воздуха и отработавших газов рециркуляции, поступающих в цилиндр. Затем вычисляют количество топлива, необходимое для достижения стехиометрии в цилиндре, и осуществляют его подачу путем включения топливной форсунки на время, необходимое для подачи данного количества топлива с учетом температуры и давления топлива. Необходимое время включения обеспечивают за счет длительности импульса электрического сигнала, приводящего в действие указанную топливную форсунку. Затем выполнение способа 500 завершают.
В качестве одного примера, заряд воздуха в цилиндр вычисляют один раз за событие в цилиндре. То есть заряд воздуха в цилиндр вычисляют при каждом повороте на 180° коленчатого вала для равномерно работающего 4-цилиндрового двигателя. В одном примере снятие показаний датчика O2BB осуществляют с частотой 1000 Гц и сохраняют снятые показания в буфере. Всякий раз, когда контроллер запрашивает входные данные от датчика O2BB, указанные входные данные получают на основе среднего значения снятых показаний, снятых за последние по времени 180°. Это позволяет уменьшить шум, связанный с событиями зажигания. Поскольку происходит изменение частоты вращения двигателя, нужно совершить «возврат по времени» или «возврат по углу» на то или иное количество снятых показаний для извлечения набора снятых показаний за последние по времени 180°. При применении «возврата по времени», контроллер вычисляет, сколько миллисекунд было затрачено на поворот на 180° при текущей частоте вращения, и использует снятые показания за данное количество миллисекунд. Если также имеются метки угла поворота коленчатого вала, контроллер может необязательно применить «возврат по углу» вместо возврата по времени. Или же контроллер может по помеченным по углу данным найти (среди буферизованных снятых показаний) значение O2BB, относящееся к конкретному событию при том или ином угле, например, к закрытию впускного клапана (ЗВК).
Следует понимать, что, несмотря на то, что способы на ФИГ. 4-5 раскрыты применительно к сигналам от датчика кислорода во всасываемом воздухе, указанную обработку можно аналогичным образом применять в отношении сигналов от датчика (кислорода) в отработавших газах, расположенного в потоке отработавших газов двигателя. Кроме того, указанную обработку можно также применять и в отношении одного или нескольких других датчиков давления (или парциального давления) двигателя, в которых возникают шумы, связанные с событиями в двигателе.
Работа двигателя 10, в частности, порядок работы его цилиндров, будет раскрыта на примере графика 600 на ФИГ. 6, содержащей диаграммы моментов зажигания для четырех цилиндров двигателя 10. Для каждой диаграммы номер цилиндра обозначен на оси у, а такты в двигателе - на оси х. Зажигание и соответствующее событие сгорания в каждом цилиндре обозначено символом «звездочка» между тактом сжатия и рабочим тактом в цилиндре. Порядок работы цилиндров двигателя 10 может быть следующим: 1-3-2-4 (или 2-4-1-3, или 3-2-4-1, или 4-1-3-2, так как зажигание происходит циклически) с равными интервалами, например, зажигание в одном цилиндре может происходить через каждые 180° угла поворота коленчатого вала. Ось х диаграммы моментов зажигания каждого цилиндра относится к углам поворота коленчатого вала двигателя, при этом 0 градусов соответствует началу рабочего такта в ЦИЛ.3. Поскольку все четыре цилиндра не совпадают по фазе друг с другом, значение угла, равное 0, соответствует началу цикла сжатия для ЦИЛ.2, цикла впуска для ЦИЛ.4 и цикла выпуска для ЦИЛ.1 соответственно. Ниже диаграммы для ЦИЛ.3 приведена дополнительная диаграмма 604, изображающая помеченные по углу сигналы датчика кислорода во всасываемом воздухе, которые были сняты с равными временными шагами. Интервал по углу поворота коленчатого вала между снятыми показаниями может быть больше или меньше в зависимости от частоты вращения двигателя (график 602), при которой были выданы снятые показания. Например, интервал по углу поворота коленчатого вала между последовательными снятыми показаниями может быть относительно большим при относительно низкой частоте вращения двигателя и относительно малым при относительно высокой частоте вращения двигателя. При этом отбор данных снятых показаний O2BB происходит по постоянному графику, например один раз в миллисекунду. Содержание кислорода, определяемое датчиком 172 кислорода во всасываемом воздухе (на ФИГ. 1) во впускном коллекторе, одинаково действительно для всех четырех цилиндров.
Первый такт, изображенный на ФИГ. 6 начинающимся в момент, соответствующий углу поворота коленчатого вала 180 градусов, представляет собой такт сжатия в ЦИЛ.2, в конце которого происходит зажигание, на что указывает звездочка. Одновременно в ЦИЛ.4, ЦИЛ.1 и ЦИЛ.3 происходят такт впуска, так выпуска и рабочий такт соответственно. Данная полная последовательность повторяется по мере перемещения каждого цилиндра вправо на ФИГ. 6 в сторону соответствующего следующего такта четырехтактного цикла.
Запрос оценки заряда воздуха поступает один раз за каждый период сгорания, как указано в моменты 610 и 612. В одном примере запрос оценки заряда воздуха для события в цилиндре совпадает с событием закрытия впускного клапана в данном цилиндре (например, ЦИЛ.3 в момент 610 и ЦИЛ.2 в момент 312). В некоторых случаях запрос оценки заряда воздуха совпадает со снятием сигнала датчика всасываемого воздуха, например, в момент 612. В других случаях они не совпадают, например, в момент 610.
Как раскрыто выше для способа 500, при поступлении запроса оценки заряда воздуха в момент 610, контроллер может осуществить ретроспективный поиск в буфере снятых показаний, относящихся к предыдущему периоду сгорания, и выбрать как минимум два снятых показания, соответствующих указанному прошлому периоду сгорания и частоте зажигания. Например, контроллер может выбрать снятые показания 620 и 630 (закрашенные кружки), но отклонить снятые показания 618, 622, 624 и 626. Те или иные снятые показания выбирают по моменту, когда происходит такт впуска воздуха. Выбор снятого показания также может быть обусловлен местоположением датчика кислорода во всасываемом воздухе и объемом заряда воздуха между датчиком и цилиндром, в котором происходит впуск. Аналогичным образом, при поступлении запроса оценки заряда воздуха в момент 612, контроллер может осуществить ретроспективный поиск в буфере снятых показаний, относящихся к предыдущему периоду сгорания, и выбрать как минимум два снятых показания, соответствующих указанному прошлому периоду сгорания и частоте зажигания. Например, контроллер может выбрать снятые показания 640 и 646 (штриховые кружки), но отклонить снятые показания 638 и 642.
В другом примере, по запросу оценки заряда воздуха в момент 610, контроллер может извлечь все снятые показания в буфере, относящиеся к периоду, отстоящему в прошлое на 180 градусов, в том числе снятые показания 622, 624, 626 и 630, при этом отклонив снятые показания 620, 618 и любые предыдущие снятые показания, так как они относятся к периоду, отстоящему в прошлое более, чем на 180 градусов. Затем может быть оценен заряд воздуха по среднему значению снятых показаний 622-630. Аналогичным образом, по запросу оценки заряда воздуха в момент 612, контроллер может извлечь все снятые показания в буфере, относящиеся к периоду, отстоящему в прошлое на 180 градусов, в том числе снятые показания 642 и 646, при этом отклонив снятые показания 640, 638 и любые предыдущие снятые показания, так как они относятся к периоду, отстоящему в прошлое более, чем на 180 градусов. Затем может быть оценен заряд воздуха по среднему значению снятых показаний 642 и 646.
В другом примере, по метке угла, контроллер может осуществить поиск и определить снятое показание ДВК датчика на впуске, полученное в момент, наиболее близкий к ЗВК до (но не после) его наступления. Затем по данному снятому показанию можно рассчитать заряд воздуха.
Так можно повысить достоверность оценки заряда воздуха в цилиндр. Применение нескорректированного показания датчика кислорода для оценки заряда воздуха, используемого для регулирования подачи топлива, позволяет точно регулировать подачу топлива в двигатель даже в присутствии разбавителей. Кроме того, определение адаптивной поправки по топливу можно выполнять в условиях наличия потока разбавителей, что позволяет чаще определять адаптивную поправку по топливу за цикл езды. Оценка заряда воздуха таким способом позволяет более эффективно регулировать параметры работы двигателя, например, величину подачи топлива в цилиндр. Раскрытый способ содержит шаги, на которых снимают сигнал датчика кислорода во всасываемом воздухе с равными временными интервалами, присваивают данным сигналам метку соответствующего по времени угла поворота коленчатого вала и сохраняют данные сигналы в буфере. Способ дополнительно содержит шаг, на котором, по запросу оценки заряда воздуха от системы двигателя, осуществляют поиск в буфере для выявления одного или нескольких снятых показаний из прошлого периода сгорания, совпадающих по времени с частотой зажигания. Выявленные снятые показания используют непосредственно для оценки количества воздуха для регулирования подачи топлива, даже при наличии потока какого-либо разбавителя, например, газов РОГ, в двигатель. Достоверный результат оценки заряда воздуха в цилиндр используют для изменения какого-либо параметра работы двигателя, например, величины впрыска топлива в цилиндр. Технический эффект, достигаемый определением заряда воздуха путем извлечения из буфера помеченного по углу сигнала (или множества сигналов) датчика кислорода во всасываемом воздухе, состоит в повышении достоверности оценки заряда воздуха в цилиндр для регулирования подачи топлива в двигатель и крутящего момента двигателя.
Один пример способа для двигателя содержит шаги, на которых: в условиях наличия потока одного или нескольких разбавителей в двигатель, регулируют подачу топлива в двигатель в соответствии с показанием датчика кислорода во всасываемом воздухе независимо от указанных разбавителей; и определяют адаптивную поправку по топливу. В предыдущем примере, дополнительно или необязательно, один или более разбавителей включают в себя следующее: газы рециркуляции отработавших газов (РОГ), и/или топливные пары от продувки, и/или топливные пары от вентиляции картера, причем датчик кислорода во всасываемом воздухе соединен с заборным каналом двигателя. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, регулирование подачи топлива в двигатель независимо от разбавителей включает в себя регулирование подачи топлива в двигатель в зависимости от нескорректированного показания датчика кислорода во всасываемом воздухе. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, регулирование подачи топлива в двигатель включает в себя оценку заряда воздуха в цилиндр в соответствии с показанием датчика кислорода во всасываемом воздухе, без коррекции указанного показания на разбавители, и оценку подачи топлива в двигатель в зависимости от результата оценки заряда воздуха в цилиндр. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, регулирование подачи топлива в двигатель и определение адаптивной поправки по топливу включают в себя упреждающее регулирование величины подачи топлива в двигатель в соответствии с указанным показанием датчика кислорода во всасываемом воздухе и регулирование величины подачи топлива в двигатель с обратной связью по воздушно-топливному отношению, оцениваемому датчиком отработавших газов. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором регулируют длительность импульса подачи топлива в зависимости от скорректированной величины подачи топлива в двигатель. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором, в условиях наличия потока одного или нескольких разбавителей в двигатель, определяют погрешность одного или нескольких компонентов двигателя, в том числе датчика расхода воздуха через впускной коллектор. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором корректируют показание датчика кислорода во всасываемом воздухе на разбавители и регулируют исполнительное устройство двигателя в зависимости от результата оценки крутящего момента цилиндра в соответствии со скорректированным показанием. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, указанная коррекция включает в себя оценку концентрации разбавителя с помощью датчика разбавителя и уменьшение показания датчика кислорода во всасываемом воздухе в зависимости от концентрации разбавителя. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, показание датчика кислорода во всасываемом воздухе представляет собой ток накачки, генерируемый в результате подачи опорного напряжения на датчик, при этом опорное напряжение представляет собой напряжение, при котором на датчике не происходит диссоциация молекул воды, при этом регулируемое исполнительное устройство двигателя представляет собой впускной дроссель, соединенный с заборным каналом, и/или клапан РОГ, соединенный с магистралью РОГ.
Еще один пример способа для управления двигателем, содержит шаги, на которых: в условиях наличия потока топливных паров из продуваемого адсорбера, и/или картера, и/или магистрали рециркуляции отработавших газов на впуск двигателя, регулируют с помощью контролера подачу с помощью инжектора топлива в двигатель в зависимости от нескорректированного показания кислорода датчика кислорода во всасываемом воздухе, причем контроллер выполнен с возможностью определения концентрации указанных топливных паров и регулируют с помощью контроллера исполнительное устройство создания крутящего момента двигателя в зависимости от скорректированного показания датчика, при этом указанное показание скорректировано в зависимости от указанной концентрации топливных паров. В предыдущем примере, дополнительно или необязательно, способ дополнительно содержит шаги, на которых: определяют погрешность топливной форсунки в условиях наличия указанных потоков по воздушно-топливному отношению сжигаемой смеси согласно показанию датчика отработавших газов, определяют погрешность на влажность в условиях наличия указанных потоков в соответствии с показанием датчика кислорода во всасываемом воздухе, и дополнительно регулируют подачу топлива в двигатель с учетом определенных погрешностей. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, нескорректированное показание датчика кислорода во всасываемом воздухе представляет собой ток накачки, генерируемый в результате подачи опорного напряжения, при котором не происходит диссоциация молекул воды, причем скорректированное показание датчика кислорода во всасываемом воздухе представляет собой показание, скорректированное путем уменьшения на коэффициент, в основе которого лежит концентрация топливных паров. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором снимают показания датчика кислорода во всасываемом воздухе с равным временным шагом, сохраняют каждый снятый сигнал в буфере, обрабатывают сохраненные снятые сигналы в буфере с равным шагом по углу поворота коленчатого вала двигателя и оценивают заряд всасываемого воздуха в цилиндр по одному или нескольким обработанным снятым сигналам. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, указанные один или несколько обработанных снятых сигналов представляют собой сигналы, относящиеся к непосредственно предшествующему периоду сгорания.
Еще один пример системы содержит: двигатель, содержащий цилиндр, выполненный с возможностью подачи в него всасываемого воздуха из заборного канала; датчик кислорода, соединенный с заборным каналом; магистраль РОГ для рециркуляции отработавших газов из выпускного канала в заборный канал, при этом магистраль РОГ содержит клапан РОГ и датчик РОГ; датчик отработавших газов, соединенный с выпускным каналом; форсунку непосредственного впрыска для впрыска топлива в цилиндр; и контроллер. Контроллер может быть выполнен с машиночитаемыми командами, сохраненными в долговременной памяти, для совершения следующих действий: во время рециркуляции отработавших газов в заборный канал, снятия сигнала датчика кислорода с заданной частотой снятия; присвоения каждому снятому показанию метки соответствующего угла поворота коленчатого вала двигателя; сохранения каждого помеченного снятого показания в буфере; и, в связи с запросом впрыска топлива в цилиндр, извлечения из буфера как минимум двух снятых показаний, имеющих метку угла поворота коленчатого вала, относящуюся к периоду сгорания, непосредственно предшествующему указанному запросу; вычисления результата оценки заряда воздуха для цилиндра по среднему значению извлеченных как минимум двух снятых показаний; определения величины впрыска топлива по вычисленному результату оценки заряда воздуха; коррекции величины впрыска топлива с учетом определенной погрешности топливной форсунки; и задания длительности импульса для топливной форсунки в соответствии со скорректированной величиной впрыска топлива. В предыдущем примере, дополнительно или необязательно, форсунка непосредственного впрыска выполнена с возможностью впрыска первого, жидкого, топлива в цилиндр, при этом система дополнительно содержит форсунку впрыска во впускной канал для впрыска второго, газообразного, топлива во впускной канал указанного цилиндра. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, величина впрыска топлива, зависящая от вычисленного результата оценки заряда воздуха, не зависит от концентрации газов РОГ, причем контроллер содержит дополнительные команды для коррекции результата оценки заряда воздуха по концентрации газов РОГ, при этом концентрацию газов РОГ определяют с помощью датчика РОГ; и регулирования одного или нескольких исполнительных устройств создания крутящего момента двигателя в соответствии со скорректированным результатом оценки заряда воздуха, в число указанных одного или нескольких исполнительных устройств создания крутящего момента двигателя входит клапан РОГ. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, контроллер содержит дополнительные команды для адаптивного определения погрешности топливной форсунки по показанию датчика отработавших газов в условиях рециркуляции отработавших газов в заборный канал. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, снятие сигнала датчика кислорода включает в себя подачу опорного напряжения, при котором не происходит диссоциация молекул воды, на датчик кислорода и снятие показания тока накачки, генерируемого в результате подачи опорного напряжения.
Еще один пример способа для двигателя содержит шаги, на которых: снимают сигнал датчика кислорода во всасываемом воздухе с равным временным шагом; сохраняют каждый снятый сигнал в буфере; обрабатывают сохраненные снятые сигналы в буфере с равным шагом по углу поворота коленчатого вала двигателя; и изменяют параметр работы двигателя в зависимости от выбранных двух или нескольких обработанных снятых сигналов. В предыдущем примере, дополнительно или необязательно, изменение параметра работы двигателя в зависимости от выбранных двух или нескольких обработанных снятых сигналов включает в себя регулирование величины впрыска топлива в зависимости от среднего значения выбранных двух или более обработанных снятых сигналов. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, обработка сохраненных снятых сигналов в буфере с равным шагом по углу поворота коленчатого вала двигателя включает в себя обработку указанных сохраненных снятых сигналов с частотой зажигания в двигателе. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором, перед тем, как сохранить каждый снятый сигнал в буфере, каждому снятому сигналу присваивают метку угла поворота коленчатого вала двигателя, соответствующую углу поворота коленчатого вала двигателя в момент снятия указанного сигнала. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, указанную обработку выполняют один раз за событие сгорания в двигателе, причем обработка сохраненных снятых сигналов в буфере с равным шагом по углу поворота коленчатого вала двигателя включает в себя: при наступлении события сгорания для того или иного цилиндра, выбор из буфера как минимум двух снятых сигналов с меткой угла поворота коленчатого вала двигателя, соответствующей углу поворота коленчатого вала двигателя для непосредственно предшествующего события сгорания (в данном цилиндре); обработку выбранных снятых сигналов для оценки заряда воздуха во впускном коллекторе; причем коррекция величины впрыска топлива включает в себя коррекцию величины впрыска топлива в зависимости от результата оценки заряда воздуха во впускном коллекторе. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, оценка заряда воздуха во впускном коллекторе включает в себя оценку чистого расхода подачи кислорода в цилиндры двигателя. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, датчик кислорода во всасываемом воздухе соединен с заборным каналом двигателя, причем указанные снятие, сохранение и обработку выполняют в условиях рециркуляции отработавших газов из выпускного канала в заборный канал. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором корректируют величину впрыска топлива в зависимости от погрешности топливной форсунки, определенной с помощью датчика воздушно-топливного отношения в отработавших газах, при этом погрешность топливной форсунки определяют в условиях рециркуляции отработавших газов; и регулируют длительность импульса впрыска топлива для впрыска топлива в соответствии со скорректированной величиной впрыска топлива в тот или иной цилиндр. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором корректируют результат оценки заряда воздуха во впускном коллекторе по концентрации углеводородов в рециркулируемых отработавших газах, и регулируют исполнительное устройство создания крутящего момента в зависимости от скорректированного заряда воздуха во впускном коллекторе. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, концентрацию углеводородов в рециркулируемых отработавших газах оценивают с помощью датчика воздушно-топливного отношения, соединенного с магистралью РОГ, причем исполнительное устройство создания крутящего момента представляет собой клапан РОГ, соединенный с указанной магистралью РОГ.
Еще один пример способа для двигателя содержит шаги, на которых: снимают сигнал датчика кислорода во впускном коллекторе с заданными временными интервалами для формирования набора данных, содержащего множество снятых показаний; присваивают каждому снятому показанию набора данных метку угла поворота коленчатого вала двигателя; и, по запросу впрыска топлива, регулируют впрыск топлива в зависимости от результата оценки величины заряда всасываемого воздуха по выбранным двум или более снятым показаниям из набора данных, при этом выбранные два или более снятые показания имеют метку угла поворота коленчатого вала двигателя, относящуюся к периоду сгорания, непосредственно предшествующему указанному запросу впрыска топлива. В предыдущем примере, дополнительно или необязательно, запрос впрыска топлива представляет собой запрос впрыска топлива для того или иного цилиндра двигателя, причем как минимум одно из выбранных двух или более снятых показаний имеет метку угла поворота коленчатого вала, наиболее близкую к определенному углу поворота коленчатого вала двигателя относительно всех прочих снятых показаний в указанном наборе данных, при этом указанный определенный угол поворота коленчатого вала двигателя соответствует событию закрытия впускного клапана для данного цилиндра. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, присвоение каждому снятому показанию набора данных метки угла поворота коленчатого вала двигателя включает в себя, для того или иного снятого показания, извлечение значения угла поворота коленчатого вала двигателя в момент времени, когда данное показание было снято, и присвоение данному снятому показанию метки угла поворота коленчатого вала согласно извлеченному значению. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором сохраняют указанный набор данных в буфере запоминающего устройства контроллера, функционально соединенного с датчиком кислорода во всасываемом воздухе. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, способ дополнительно содержит шаг, на котором, после того, как впрыск топлива будет отрегулирован в зависимости от результата оценки величины заряда всасываемого воздуха по выбранным двум или более снятым показаниям, удаляют остальные снятые показания набора данных из буфера.
Еще один пример системы содержит: двигатель, содержащий цилиндр, выполненный с возможностью подачи в него всасываемого воздуха из заборного канала; датчик кислорода, соединенный с заборным каналом; топливную систему, содержащую топливный бак, соединенный с адсорбером для улавливания топливных паров, продувочный канал для продувки топливных паров из адсорбера в заборный канал и продувочный клапан, соединенный с продувочным каналом; датчик отработавших газов, соединенный с выпускным каналом; форсунку непосредственного впрыска для впрыска топлива в цилиндр; и контроллер. Контроллер может быть выполнен с машиночитаемыми командами, сохраненными в долговременной памяти, для совершения следующих действий: во время продувки топливных паров из адсорбера в заборный канал, снятия сигнала датчика кислорода с заданной частотой снятия; присвоения каждому снятому показанию метки соответствующего угла поворота коленчатого вала двигателя; сохранения каждого помеченного снятого показания в буфере; и, в связи с запросом впрыска топлива в цилиндр, извлечения из буфера как минимум двух снятых показаний, имеющих метку угла поворота коленчатого вала, относящуюся к периоду сгорания, непосредственно предшествующему указанному запросу; вычисления результата оценки заряда воздуха для цилиндра по среднему значению извлеченных как минимум двух снятых показаний; определения величины впрыска топлива по вычисленному результату оценки заряда воздуха; коррекции величины впрыска топлива с учетом определенной погрешности топливной форсунки; и задания длительности импульса для топливной форсунки в соответствии со скорректированной величиной впрыска топлива. В предыдущем примере, дополнительно или необязательно, форсунка непосредственного впрыска выполнена с возможностью впрыска первого, жидкого, топлива в цилиндр, при этом система дополнительно содержит форсунку впрыска во впускной канал для впрыска второго, газообразного, топлива во впускной канал указанного цилиндра. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, величина впрыска топлива, зависящая от вычисленного результата оценки заряда воздуха, не зависит от концентрации топливных паров от продувки, причем контроллер содержит дополнительные команды для совершения следующих действий: коррекции результата оценки заряда воздуха по концентрации топливных паров от продувки, при этом концентрацию топливных паров от продувки определяют с помощью датчика продувки, соединенного с продувочным каналом; и регулирования одного или нескольких исполнительных устройств создания крутящего момента двигателя в соответствии со скорректированным результатом оценки заряда воздуха, при этом в число указанных одного или нескольких исполнительных устройств создания крутящего момента двигателя входит продувочный клапан. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, контроллер содержит дополнительные команды для адаптивного определения погрешности топливной форсунки по показанию датчика отработавших газов во время продувки топливных паров из адсорбера в заборный канал. Во всех предыдущих примерах или в любом из них, дополнительно или необязательно, снятие сигнала датчика кислорода включает в себя подачу опорного напряжения, при котором не происходит диссоциация молекул воды, на датчик кислорода и снятие показания тока накачки, генерируемого в результате подачи опорного напряжения.
Следует отметить, что включенные в настоящую заявку примеры алгоритмов управления и оценки могут использоваться с разнообразными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых команд в долговременной памяти и выполняться системой управления, содержащей контроллер, совместно с различными датчиками, исполнительными механизмами и другими аппаратными средствами в составе двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и т.д. Таким образом, проиллюстрированные разнообразные действия, операции и/или функции могут выполняться в указанной последовательности, параллельно, а в некоторых случаях - могут опускаться. Точно так же указанный порядок обработки не обязательно требуется для достижения отличительных особенностей и преимуществ описываемых здесь вариантов осуществления изобретения, но служит для удобства иллюстрирования и описания. Одно или несколько из иллюстрируемых действий, операций и/или функций могут выполняться повторно в зависимости от конкретной применяемой стратегии. Кроме того, раскрытые действия, операции и/или функции могут графически изображать код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, при этом раскрытые действия осуществляют путем выполнения указанных команд в системе, содержащей различные аппаратные средства в составе двигателя, совместно с электронным контроллером.
Следует понимать, что раскрытые в настоящем описании конфигурации и программы по своей сути являются лишь примерами, и что конкретные варианты осуществления не должны рассматриваться в ограничительном смысле, ибо возможны разнообразные их модификации. Например, вышеизложенная технология может быть применена к двигателям со схемами расположения цилиндров V-6, I-4, I-6, V-12, в схеме с 4-мя оппозитными цилиндрами и в двигателях других типов. Предмет настоящего изобретения включает в себя все новые и неочевидные комбинации и подкомбинации различных систем и схем, а также других отличительных признаков, функций и/или свойств, раскрытых в настоящем описании.
В нижеследующей формуле изобретения, в частности, указаны определенные комбинации и подкомбинации компонентов, которые считаются новыми и неочевидными. В таких пунктах формулы ссылка может быть сделана на «один» элемент или «первый» элемент или на эквивалентный термин. Следует понимать, что такие пункты могут включать в себя один или более указанных элементов, не требуя и не исключая двух или более таких элементов. Иные комбинации и подкомбинации раскрытых отличительных признаков, функций, элементов или свойств могут быть включены в формулу путем изменения имеющихся пунктов или путем представления новых пунктов формулы в настоящей или родственной заявке. Такие пункты формулы изобретения, независимо от того, являются они более широкими, более узкими, эквивалентными или отличающимися в отношении объема идеи первоначальной формулы изобретения, также считаются включенными в предмет настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ (ВАРИАНТЫ) РЕГУЛИРОВАНИЯ ВПРЫСКА ВОДЫ В ДВИГАТЕЛЬ | 2017 |
|
RU2702783C2 |
| Способ и система для определения состава антидетонационной жидкости | 2016 |
|
RU2719186C2 |
| СИСТЕМА И СПОСОБ (ВАРИАНТЫ) ДИАГНОСТИКИ НАРАСТАНИЯ САЖИ НА КЛАПАНЕ РЕЦИРКУЛЯЦИИ ОТРАБОТАВШИХ ГАЗОВ | 2016 |
|
RU2702715C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ВПРЫСКА ВОДЫ В ДВИГАТЕЛЬ | 2017 |
|
RU2693282C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВЫЯВЛЕНИЯ ДЕГРАДАЦИИ ДАТЧИКА КИСЛОРОДА ИЗ-ЗА ВЫДЕЛЕНИЯ ГАЗА ИЗ ГЕРМЕТИКА | 2018 |
|
RU2698855C2 |
| СПОСОБ (ВАРИАНТЫ) ДЛЯ ДВИГАТЕЛЯ | 2017 |
|
RU2718386C2 |
| ОЦЕНКА ЗАРЯДА ВОЗДУХА НА ОСНОВЕ ЗНАЧЕНИЯ ДАВЛЕНИЯ В КОЛЛЕКТОРЕ В МОМЕНТ ЗАКРЫТИЯ ВПУСКНОГО КЛАПАНА | 2016 |
|
RU2705804C2 |
| Способ (варианты) и система для регулирования впрыска воды в двигатель | 2017 |
|
RU2684065C1 |
| Способ обеспечения измерения влажности | 2016 |
|
RU2689227C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ (ВАРИАНТЫ) | 2016 |
|
RU2689274C2 |
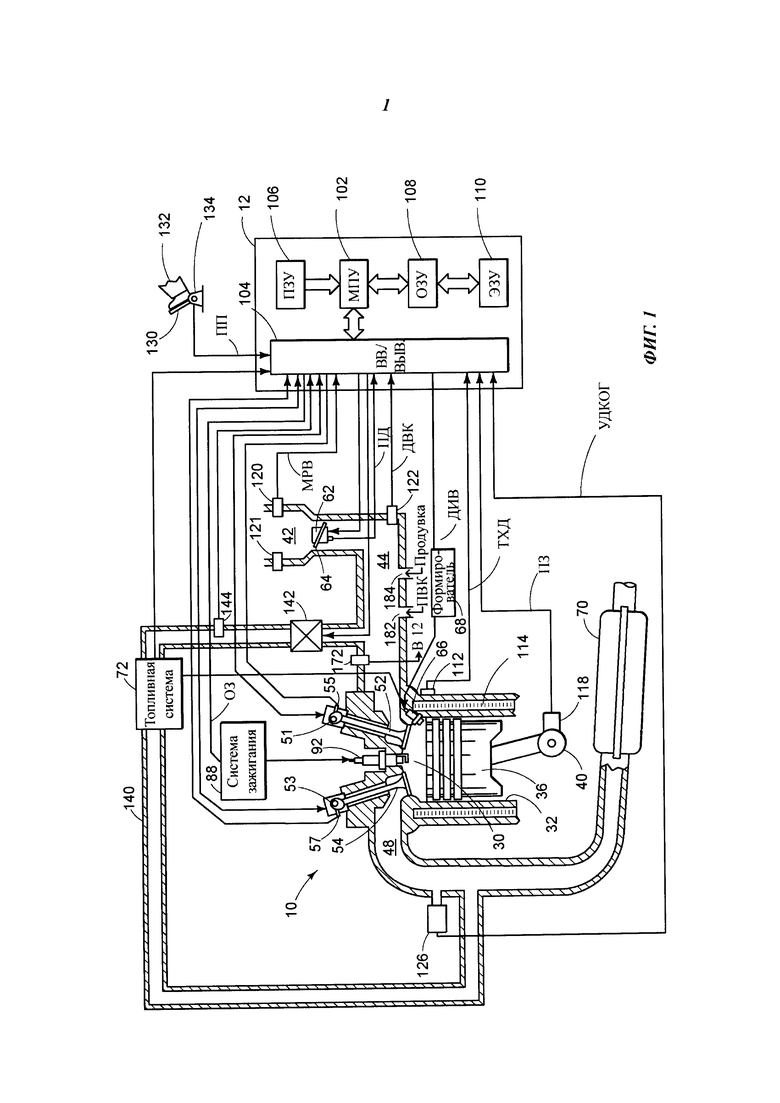
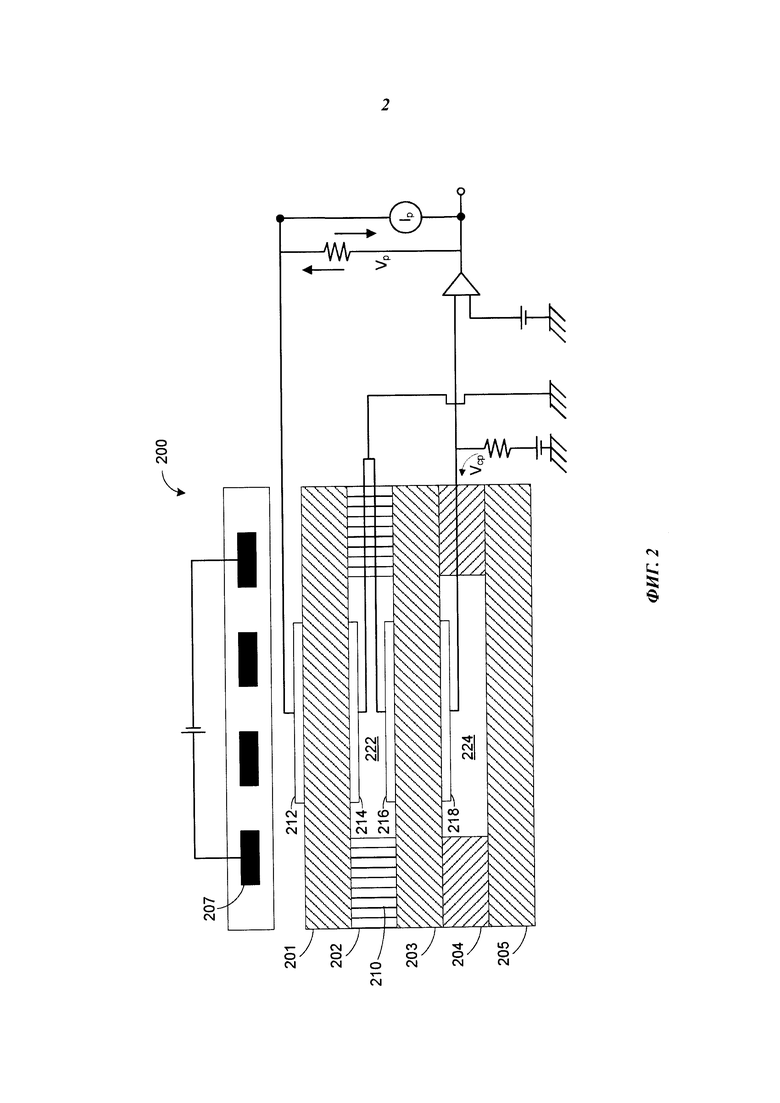
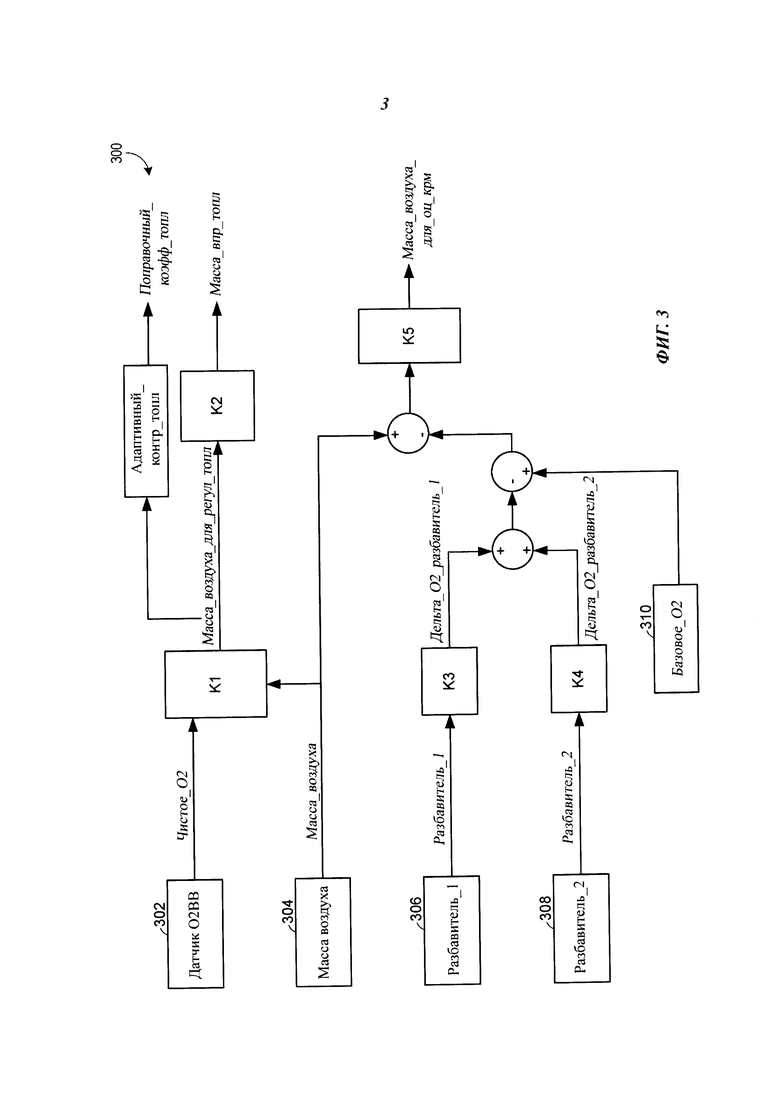
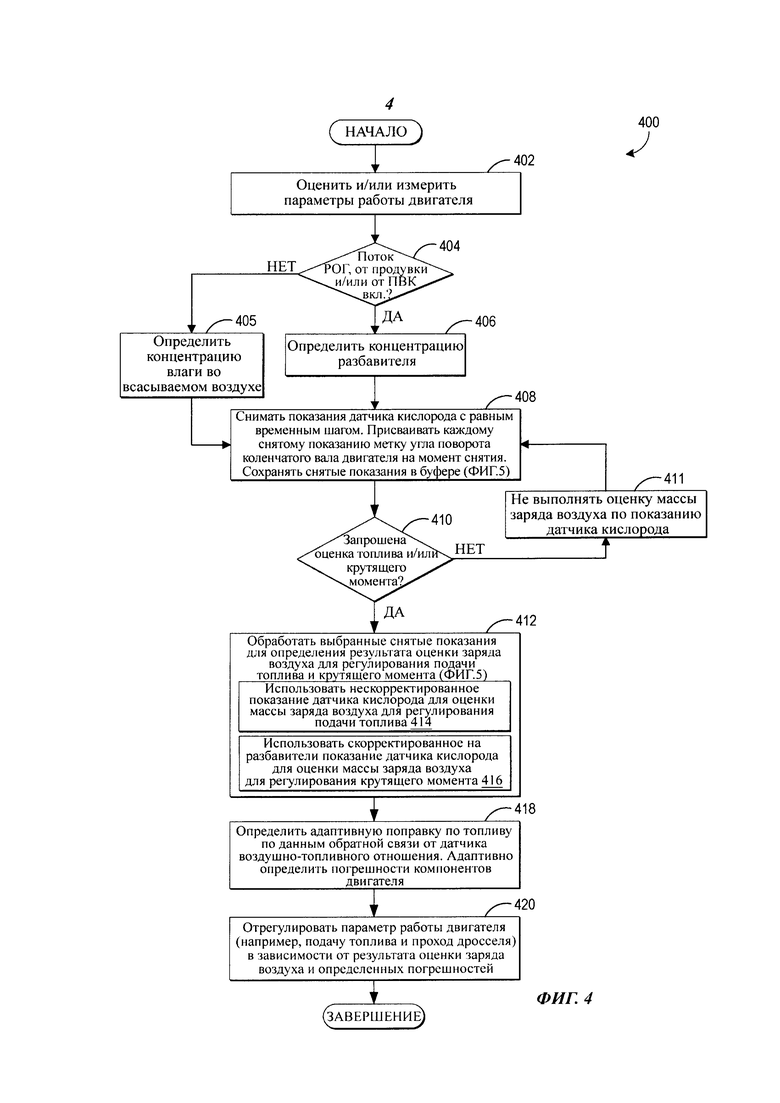
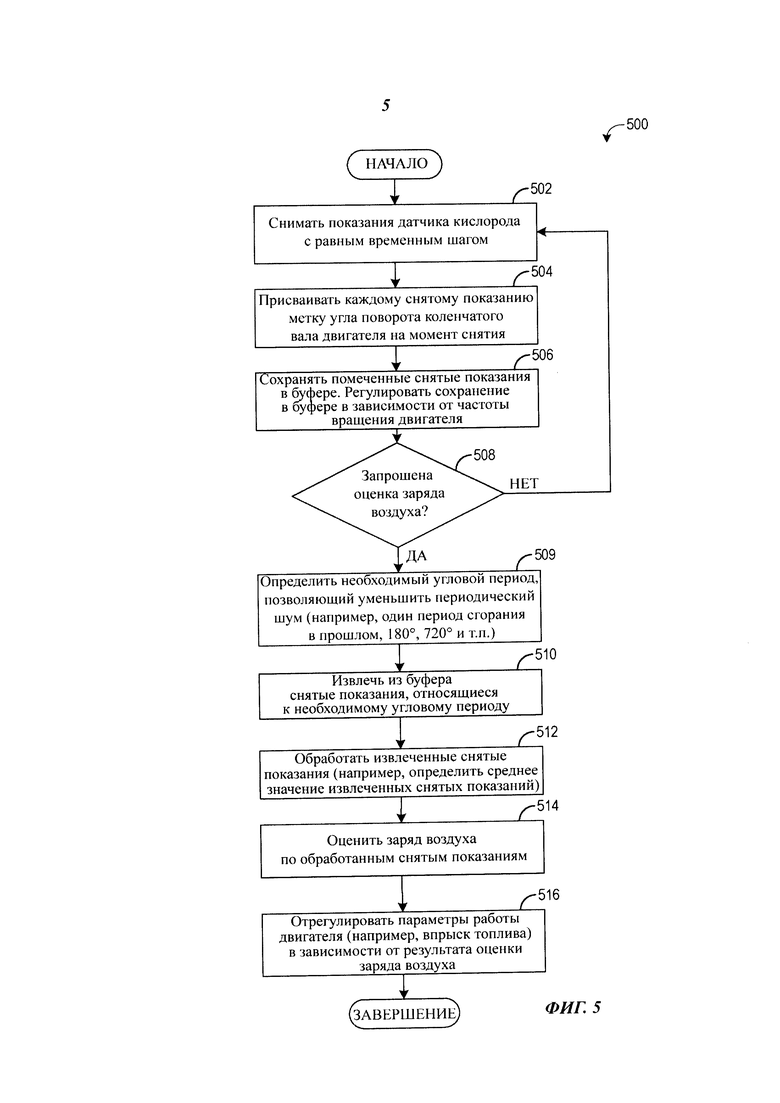
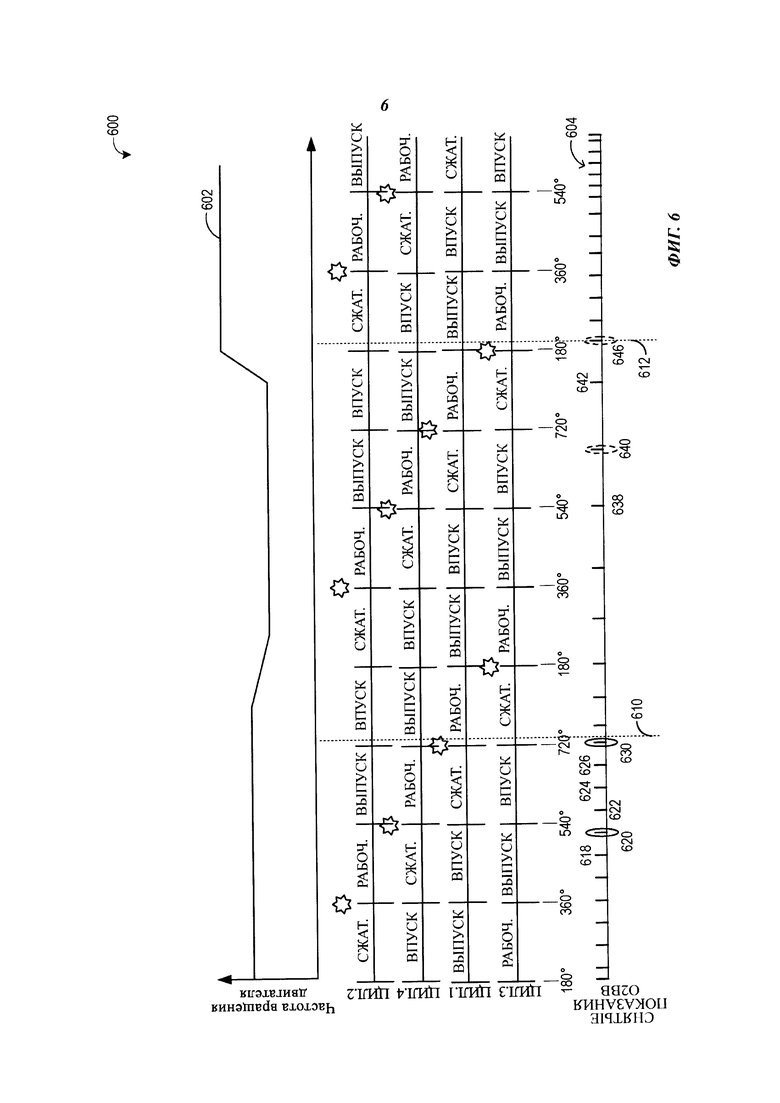
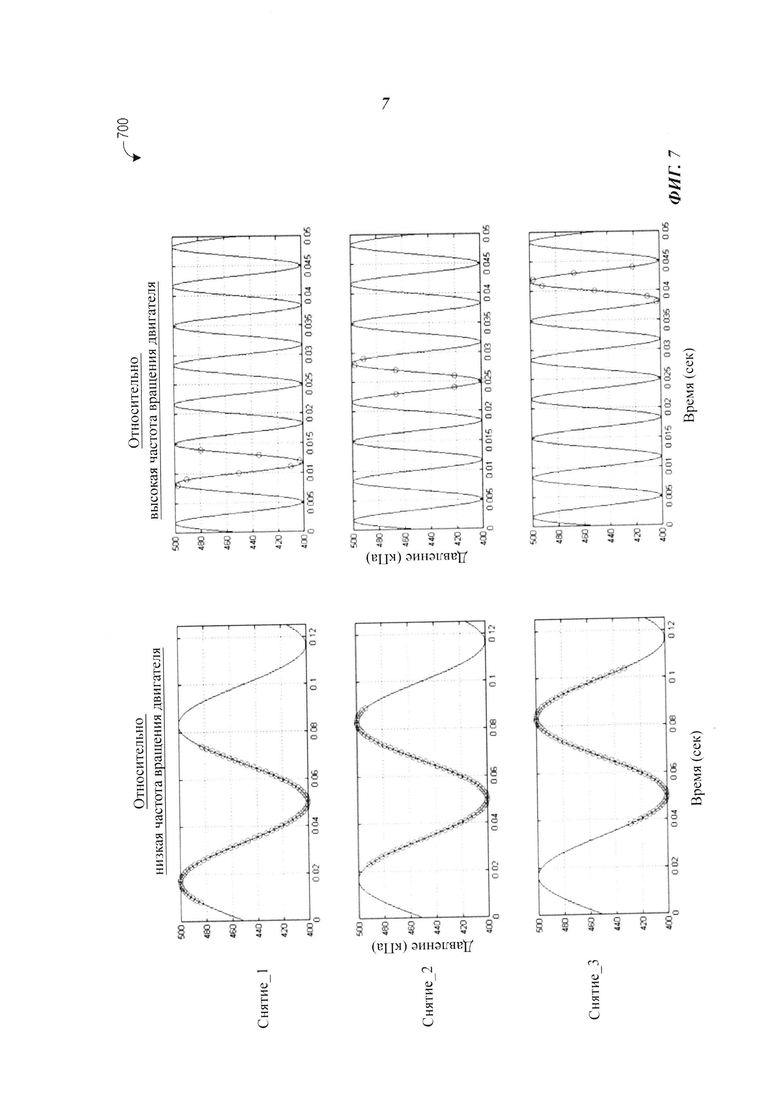
Изобретение может быть использовано в системах управления двигателями внутреннего сгорания. Предложены способы и системы для достоверной оценки заряда всасываемого воздуха в соответствии с показанием датчика кислорода во всасываемом воздухе, расположенного на впуске, в условиях наличия потока углеводородов от рециркуляции отработавших газов, продувки паров топлива или системы вентиляции картера в двигатель. Нескорректированный результат оценки заряда воздуха применяют для регулирования подачи топлива в двигатель, а скорректированный на углеводороды результат оценки заряда воздуха применяют для регулирования крутящего момента двигателя, например, путем регулирования открытия дроссельной заслонки. За счет применения предложенного регулирования достигается улучшение эксплуатационных показателей двигателя. 4 з.п. ф-лы, 7 ил.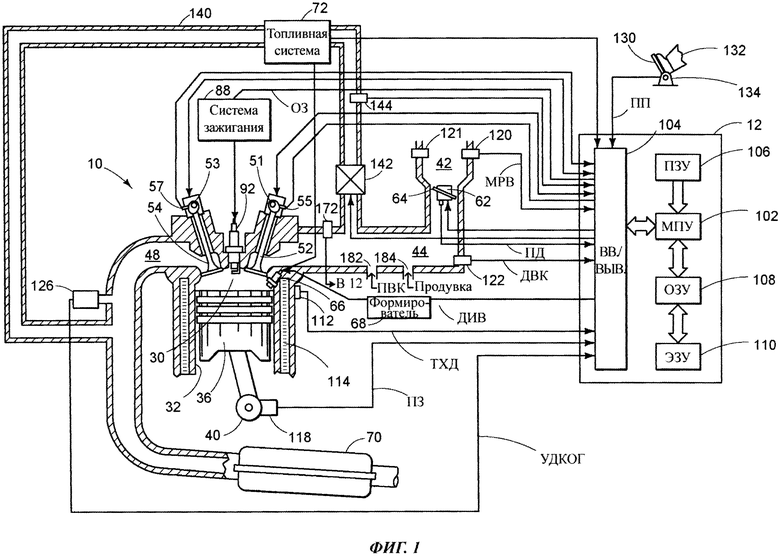
1. Способ для управления двигателем, содержащий шаги, на которых
в условиях наличия потока топливных паров из продуваемого адсорбера, и/или картера, и/или магистрали рециркуляции отработавших газов на впуск двигателя:
регулируют с помощью контроллера подачу с помощью инжектора топлива в двигатель в зависимости от нескорректированного показания кислорода датчика кислорода во всасываемом воздухе, причем контроллер выполнен с возможностью определения концентрации указанных топливных паров; и
регулируют с помощью контроллера исполнительное устройство создания крутящего момента двигателя в зависимости от скорректированного показания датчика, при этом указанное показание скорректировано в зависимости от указанной концентрации топливных паров.
2. Способ по п. 1, дополнительно содержащий шаги, на которых: определяют погрешность топливной форсунки в условиях наличия указанных потоков по воздушно-топливному отношению сжигаемой смеси согласно показанию датчика отработавших газов, определяют погрешность на влажность в условиях наличия указанных потоков в соответствии с показанием датчика кислорода во всасываемом воздухе и дополнительно регулируют подачу топлива в двигатель с учетом определенных погрешностей.
3. Способ по п. 1, отличающийся тем, что нескорректированное показание кислорода датчика кислорода во всасываемом воздухе представляет собой ток накачки, генерируемый в результате подачи опорного напряжения, при котором не происходит диссоциация молекул воды, причем скорректированное показание датчика кислорода во всасываемом воздухе представляет собой показание, скорректированное путем уменьшения на коэффициент, в основе которого лежит концентрация топливных паров.
4. Способ по п. 1, дополнительно содержащий шаги, на которых: снимают показания датчика кислорода во всасываемом воздухе с равным временным шагом, сохраняют каждый снятый сигнал в буфере, обрабатывают сохраненные снятые сигналы в буфере с равным шагом по углу поворота коленчатого вала двигателя и оценивают заряд всасываемого воздуха в цилиндр по одному или нескольким обработанным снятым сигналам.
5. Способ по п. 4, отличающийся тем, что указанные один или несколько обработанных снятых сигналов представляют собой сигналы, относящиеся к непосредственно предшествующему периоду сгорания.
| 0 |
|
SU152685A1 | |
| US 20150292429 A1, 15.10.2015 | |||
| US 20150292428 A1, 15.10.2015. | |||

