Область изобретения
Настоящее изобретение относится к регулированию потока воздуха в цилиндр двигателя.
Уровень техники/Раскрытие изобретения
Определение количества воздуха, поступающего в двигатель, и, в частности, количества воздуха в цилиндрах двигателя, является важным для различных аспектов регулирования работы двигателя, в том числе регулирования количества выбросов и потребления топлива. Ввиду различной динамики потока воздуха в дросселе и в цилиндрах, заряд воздуха часто определяют на основе значения абсолютного давления в коллекторе АДК (MAP), которое может быть измерено посредством датчика. Тем не менее, значение АДК (MAP) постоянно меняется на протяжении всей работы двигателя. В патентной заявке США №2013/0066535 А1 раскрыт способ определения заряда воздуха с использованием датчика давления, расположенного между впускным портом для воздуха в цилиндре и дросселем порта, причем этот способ содержит измерения давления для каждого цикла зажигания в каждом цилиндре в момент закрытия впускного клапана или в близкий по времени момент. В упомянутой заявке давление воздуха определяют в момент закрытия впускного клапана ЗВК (intake valve closing, IVC) или в ближайший возможный момент времени. При этом измерение АДК (MAP) в момент ЗВК (IVC) обеспечивает точную оценку давления воздуха внутри цилиндра.
Тем не менее, авторы настоящего изобретения осознают недостатки вышеупомянутого подхода. Для дискретизации сигнала датчика АДК (MAP) в момент ЗВК (IVC), блок управления двигателем БУД (engine control unit, ECU) может вырабатывать прерывание в момент ЗВК (IVC) для запуска дискретизации и/или обработки сигнала датчика АДК (MAP). В качестве альтернативы, датчик АДК (MAP) может быть опрошен с равными интервалами приращения угла поворота коленчатого вала двигателя, и затем полученные значения сигнала могут быть проанализированы для определения того, какое из значений было получено в момент ЗВК (IVC) или близко к нему. Тем не менее, каждый из этих способов является затратным с точки зрения вычислений и может быть неосуществим при текущей архитектуре БУД (ECU). Кроме того, такие способы могут обладать пониженной точностью и/или требовать еще больше вычислительных ресурсов во время работы в переходном режиме, например, при увеличивающейся скорости вращения двигателя.
Соответственно, авторы настоящего изобретения предложили подход, по меньшей мере, по частичному устранению вышеуказанных недостатков. В одном из примеров способ содержит дискретизацию сигнала датчика давления во впускном коллекторе с равными временными интервалами, сохранение каждого значения дискретизированного сигнала в буфере, обработку сохраненных в буфере значений дискретизированного сигнала с равными приращениями угла поворота коленчатого вала двигателя, и регулирование количества впрыскиваемого топлива на основе одного выбранного из обработанных значений дискретизированного сигнала.
Таким образом, сигнал от датчика давления во впускном коллекторе АДК (MAP) дискретизируют с равными временными интервалами, и каждое значение дискретизированного сигнала сохраняют в буфере. Каждому из этих значений сигнала датчика АДК (MAP) может быть присвоена метка соответствующего угла поворота коленчатого вала в момент измерения. Одновременно с этим, сохраняют задаваемое или текущее положение ЗВК (IVC). Когда должен быть вычислен заряд воздуха (например, один раз за цикл зажигания), извлекают из буфера значение сигнала АДК (MAP), соответствующее метке угла поворота, наиболее близкого к моменту ЗВК (IVC). Это значение сигнала АДК (MAP) может быть использовано для вычисления заряда воздуха для определенного цилиндра. После того, как определен заряд воздуха для цилиндра, может быть вычислено правильное количество впрыскиваемого топлива. Раскрытый способ позволяет устранить недостаток существующих БУД (ECU), неспособных одновременно дискретизировать и обрабатывать сигналы датчика при небольших интервалах приращения угла поворота коленчатого вала (например, с интервалом в 6 градусов угла поворота коленчатого вала). Использование метки углового положения для каждого значения сигнала АДК (MAP), отправляемого в буфер, избавляет от необходимости прерываний для контроллера при заранее определенных значениях угла, поскольку нет необходимости немедленной обработки каждого значения сигнала. Обработка может осуществляться тогда, когда должно начаться следующее событие зажигания в цилиндре (например, каждые. 240° для трехцилиндрового двигателя). Таким образом, может быть обеспечена точная оценка заряда воздуха при минимизации вычислительной мощности, необходимой для оценки заряда воздуха.
Описанные выше преимущества и другие преимущества и особенности настоящего изобретения станут очевидны из последующего подробного описания, рассматриваемого отдельно или совместно с прилагаемыми чертежами.
Следует понимать, что приведенное выше краткое описание представлено лишь для ознакомления в упрощенном виде с набором идей, более подробно раскрытых в подробном описании. Оно не предназначено для определения ключевых или обязательных признаков истребуемого объема изобретения, объем которого определен исключительно формулой изобретения, следующей за подробным описанием. Кроме того, истребуемый объем изобретения не ограничен вариантами осуществления, в которых устранены недостатки, указанные выше или в любой части настоящего документа.
Краткое описание чертежей
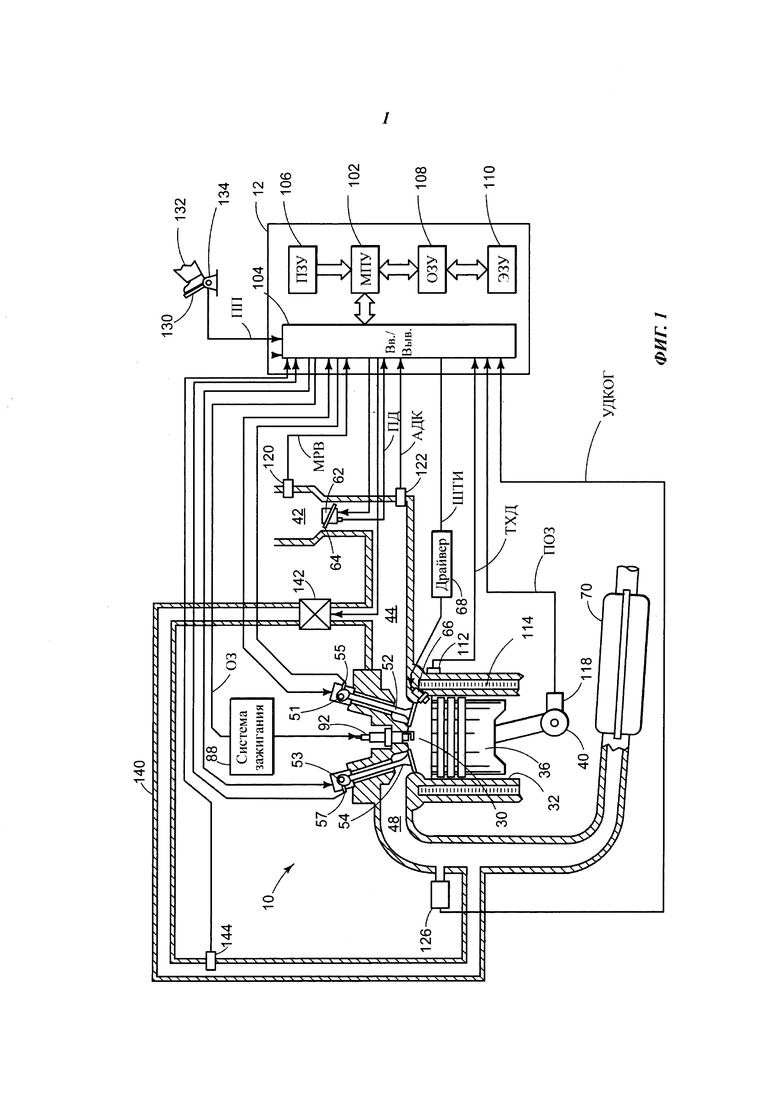
На фиг. 1 представлено схематическое изображение камеры сгорания двигателя внутреннего сгорания.
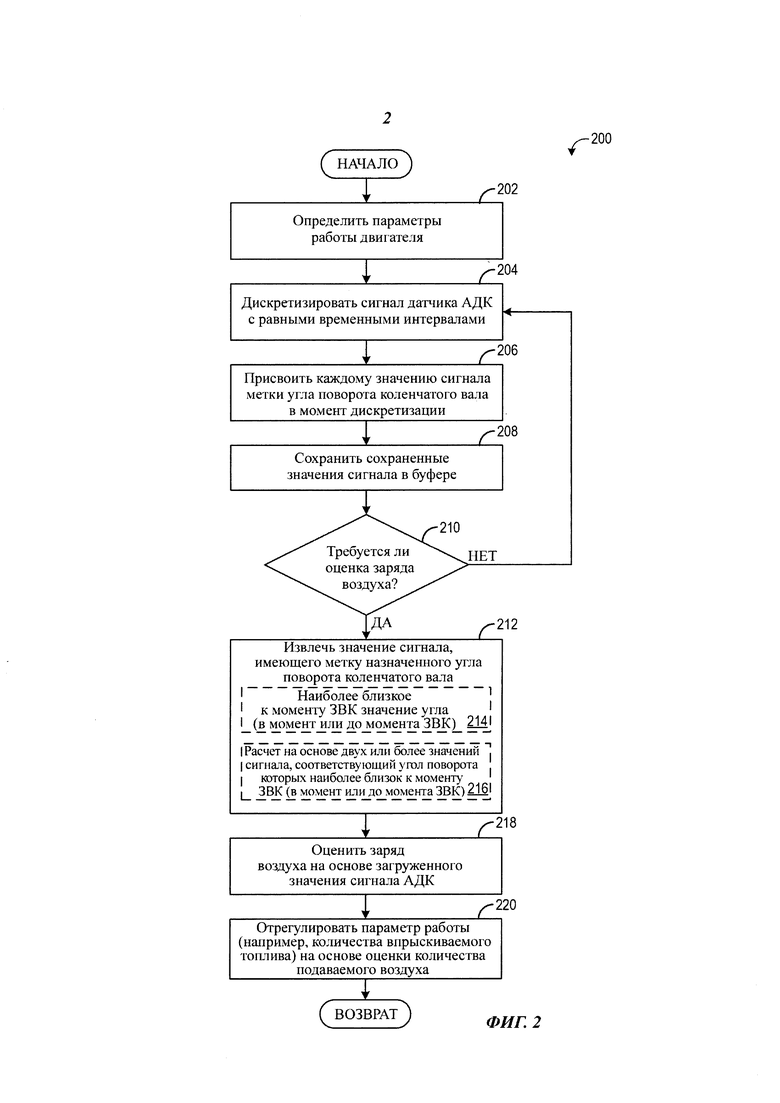
На фиг. 2 представлена блок-схема, иллюстрирующая способ для определения заряда воздуха, подаваемого в цилиндр, и регулирования параметра работы двигателя.
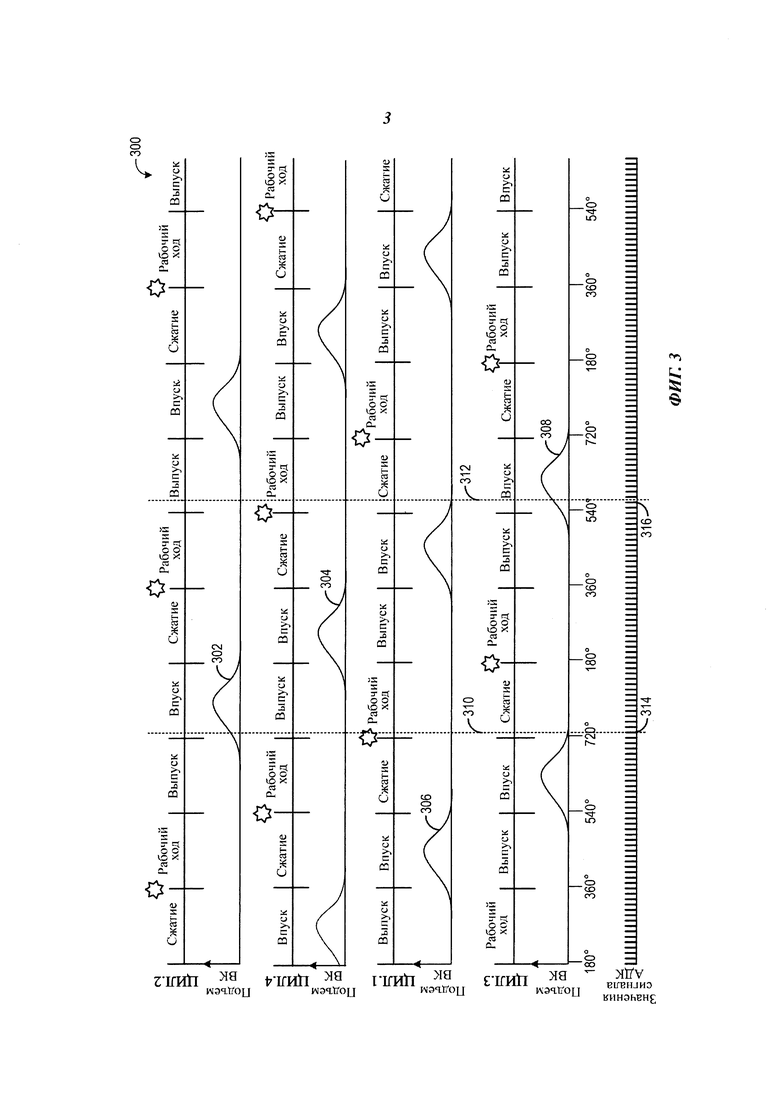
На фиг. 3 представлены диаграммы моментов зажигания, иллюстрирующие подъем впускных клапанов четырех отдельных цилиндров, и соответствующие ему углы поворота коленчатого вала и события дискретизации сигнала АДК (MAP).
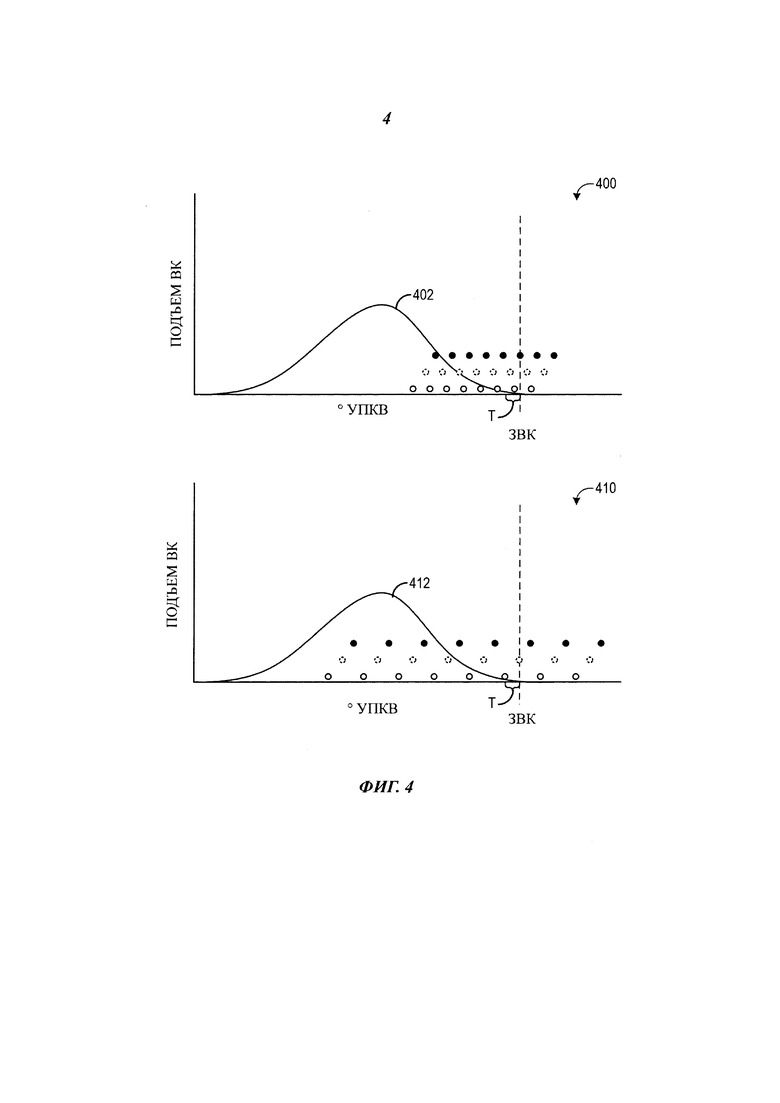
На фиг. 4 представлен подъем впускного клапана цилиндра при двух значениях скорости вращения двигателя и соответствующие ему события дискретизации сигнала АДК (MAP) незадолго до закрытия впускного клапана.
Подробное описание
Настоящее описание относится к эффективному способу дискретизации сигнала датчика абсолютного давления во впускном коллекторе АДК (MAP) в момент закрытия впускного клапана посредством дискретизации сигнала датчика с равными временными интервалами (например, с разницей во времени в 1 миллисекунду), и присваивания значениям сигнала меток угла поворота коленчатого вала. Доступ к этим значениям сигнала датчика АДК (MAP), имеющим метки угла поворота коленчатого вала, может быть осуществлен во время работы двигателя в целях определения заряда воздуха, подаваемого в цилиндр, и последующего регулирования параметров работы упомянутого двигателя. Более конкретно, для расчета заряда воздуха извлекают и используют значения сигнала с соответствующей меткой угла поворота, наиболее близкого к значению угла поворота коленчатого вала в момент закрытия впускного клапана. График получения сигнала АДК (MAP) заранее задан так, чтобы временные интервалы были равны, и как только каждому из значений сигнала присвоена метка соответствующего угла поворота, информацию сохраняют в буфере, к которому имеет доступ контроллер. Система двигателя на фиг. 1 содержит датчик АДК (MAP), который, как видно из фиг. 2, может быть дискретизирован с выбранными временными интервалами или в выбранные моменты в течение цикла работы двигателя для получения информации, которая может быть основой для определения различных условий работы двигателя. На фиг. 3 представлен пример событий зажигания для четырех отдельных цилиндров двигателя в течение нескольких четырехтактных циклов и соответствующий им подъем впускного клапана. На фиг. 3 показано, как интервалы дискретизации АДК (MAP) соотносятся с подъемом впускного клапана и соответствующим углом поворота коленчатого вала на протяжении каждого четырехтактного цикла. На фиг. 4 показан интервал между получением значений сигнала датчика АДК (MAP) и моментом закрытия впускного клапана для отдельного цилиндра при двух значениях скорости вращения двигателя для трех последовательных циклов зажигания.
На фиг. 1 представлена блок-схема, иллюстрирующая один цилиндр многоцилиндрового двигателя 10, который может входить в состав двигательной установки транспортного средства. Управление двигателем 10 может осуществляться, по меньшей мере, частично, посредством системы управления, содержащей контроллер 12, и посредством входных сигналов от оператора 132 транспортного средства, передаваемых через устройство 130 ввода. В данном примере устройство 130 ввода содержит педаль акселератора и датчик 134 положения педали, выдающий пропорциональный сигнал положения педали ПП (РР). Камера 30 сгорания (то есть, цилиндр) двигателя 10 может содержать стенки 32 камеры сгорания с расположенным в их пределах поршнем 36. Поршень 36 может быть соединен с коленчатым валом 40 с возможностью преобразования возвратно-поступательного движения поршня во вращательное движение коленчатого вала. Коленчатый вал 40 может быть соединен, по меньшей мере, с одним ведущим колесом транспортного средства через промежуточную трансмиссию. Кроме того, через маховик с коленчатым валом может быть соединен двигатель стартера, обеспечивающий запуск двигателя 10.
Камера 30 сгорания может получать впускной воздух из впускного коллектора 44 через канал 42, и может осуществлять выпуск продуктов сгорания через выпускной канал 48. Впускной коллектор 44 и выпускной канал 48 могут быть выборочно связаны с камерой 30 сгорания соответственно, через впускной клапан 52 и выпускной клапан 54. В некоторых вариантах осуществления камера 30 сгорания может содержать два или большее количество впускных клапанов и/или два или большее количество выпускных клапанов.
В данном примере управление впускным клапаном 52 и впускным клапаном 54 может осуществлять кулачковый привод посредством соответствующих систем 51 и 53 кулачкового привода. Каждая из систем 51 и 53 кулачковых приводов может содержать один или несколько кулачков и может использовать одну или несколько из систем переключения профиля кулачков ППК (CPS), изменения положения кулачков ИПК (VCT), изменения фаз газораспределения ИФГ (WT) и/или изменения высоты подъема клапанов ИВПК (WL), которыми, для изменения работы клапанов, может управлять контроллер 12. Положение впускного клапана 52 и выпускного клапана 54 может быть определено посредством датчиков 55 и 57 положения, соответственно. В альтернативных вариантах осуществления управление впускным клапаном 52 и/или выпускным клапаном 54 может быть реализовано посредством электрического привода. Например, в качестве альтернативы, цилиндр 30 может содержать впускной клапан, управляемый электрическим приводом, и выпускной клапан, управляемый кулачковым приводом, оснащенным системой ППК (CPS) и/или ИВК (VCT).
Топливный инжектор 66 показан непосредственно соединенным с камерой 30 сгорания для прямого впрыска в него топлива в количестве, пропорциональном ширине топливного импульса ШТИ (FPW), получаемого от контроллера 12 через электронный драйвер 68. Таким образом, топливный инжектор 66 осуществляет так называемый непосредственный впрыск топлива в камеру 30 сгорания. Топливный инжектор может быть установлен, например, в стенке камеры сгорания или в верхней части камеры сгорания. Подача топлива к топливному инжектору 66 может осуществляться топливной системой (не показана), содержащей топливный бак, топливный насос и топливную рампу. В некоторых вариантах осуществления камера 30 сгорания, дополнительно или в качестве альтернативы, может содержать топливный инжектор, установленный во впускном канале 42, в такой конфигурации, которая обеспечивает так называемый распределенный впрыск топлива во впускной порт перед камерой 30 сгорания по ходу потока.
Впускной канал 42 может содержать дроссель 62, содержащий дроссельную заслонку 64. В данном конкретном примере контроллер 12 может изменять положение дроссельной заслонки 64 посредством сигнала, подаваемого на электрический двигатель или привод, входящий в состав дросселя 62, в так называемой системе электронного управления дросселем ЭУД (ETC). Таким образом, работа дросселя 62 может обеспечивать изменение количества впускного воздуха, подаваемого в камеру 30 сгорания, а также другие цилиндры двигателя. Положение дроссельной заслонки 64 может передаваться контроллеру 12 в виде сигнала положения дросселя ПД (TP). Впускной канал 42 может содержать датчик 120 массового расхода воздуха и датчик 122 давления воздуха в коллекторе, передающие контроллеру 12 соответствующие сигналы МРВ (MAF) и ДВК (MAP).
Система 88 зажигания, при некоторых режимах работы, в ответ на сигнал опережения зажигания 03 (SA) от контроллера 12 может подавать в камеру 30 сгорания искру зажигания через свечу 92 зажигания. Несмотря на то, что показаны компоненты искрового зажигания, в некоторых вариантах осуществления камера 30 сгорания или одна или большее количество камер сгорания двигателя 10 могут работать в режиме зажигания от сжатия с искрой зажигания или без нее.
Датчик 126 выхлопных газов показан соединенным с выпускным каналом 48 перед устройством 70 снижения выбросов по ходу потока. Датчик 126 может быть любым подходящим датчиком для определения отношения воздуха к топливу в выхлопных газах, таким как линейный широкополосный датчик кислорода или УДКОГ (универсальный или широкополосный датчик кислорода в отработавших газах, UEGO), датчик кислорода с двумя устойчивыми состояниями ДКОГ (EGO), НДКОГ (ДКОГ с подогревом), датчик NOx, углеводородов или СО. Устройство 70 снижения выбросов 70 показано расположенным вдоль выпускного канала 48 после датчика 126 выхлопных газов по ходу потока. Устройством 70 снижения выбросов может быть трехкомпонентный каталитический нейтрализатор (TWC), ловушка NOx, различные другие устройства снижения выбросов или их сочетания. В некоторых вариантах осуществления во время работы двигателя 10, устройство 70 снижения выбросов периодически может быть перезапущено посредством работы, по меньшей мере, одного цилиндра двигателя с определенным воздушно-топливным отношением.
Кроме того, в раскрытых вариантах осуществления, система рециркуляции отработавших газов РОГ (EGR) может перенаправлять отработавшие газы в необходимой пропорции из выпускного канала 48 во впускной канал 44 через канал 140 РОГ (EGR). Контроллер 12 может осуществлять изменение количества рециркулируемых отработавших газов, подаваемых во впускной канал 44, посредством клапана 142 РВГ (EGR). Кроме того, внутри канала РОГ (EGR) может быть предусмотрен датчик 144 РОГ (EGR), обеспечивающий индикацию одного или более из давления, температуры и концентрации отработавших газов. В некоторых примерах датчик 144 является дифференциальным датчиком давлений, определяющим падение давления на отверстии регулирования потока, расположенном либо до, либо после клапана РОГ (EGR) по ходу потока, которое также отражает количество РОГ (EGR). Датчик 144 также может быть датчиком положения, который может определять изменения проходного сечения клапана на основе команд контроллера 12. Кроме того, при некоторых условиях, часть газообразных продуктов сгорания может быть удержана или захвачена в камере сгорания посредством регулирования фаз газораспределения выпускного клапана, например, посредством регулирования механизмом изменения фаз газораспределения.
Контроллер 12 показан на фиг. 1 в качестве микрокомпьютера, содержащего микропроцессорное устройство 102, порты 104 ввода/вывода, электронное запоминающее устройство для исполняемых программ и калибровочных значений, показанное в данном конкретном примере в виде микросхемы 106 постоянного запоминающего устройства, запоминающее устройство 108 с произвольным доступом, энергонезависимое запоминающее устройство 110, и шину данных. В дополнение к вышеописанным примерам, контроллер 12 может получать различные сигналы от датчиков, соединенных с двигателем 10, в том числе, измеренный массовый расход засасываемого воздуха МРВ (MAF) от датчика 120 массового расхода воздуха; температуру охлаждающей жидкости двигателя ТОД (ЕСТ) от датчика 112 температуры, соединенного с рукавом 114 охлаждения; сигнал профильного определения зажигания ПОЗ (PIP) от датчика 118 Холла (или датчика другого типа), соединенного с коленчатым валом 40; сигнал положения дросселя ПД (TP) от датчика положения дросселя; и сигнал абсолютного давления в коллекторе АДК (MAP) от датчика 122. Сигнал скорости вращения двигателя (RPM) может быть выработан контроллером 12 из сигнала профиля зажигания ПЗ (PIP). Сигнал давления воздуха в коллекторе АДК (MAP) от датчика давления во впускном коллекторе может быть использован для обеспечения индикации вакуума или давления во впускном коллекторе. Следует отметить, что могут быть использованы различные комбинации вышеуказанных датчиков, например, использование датчика АДК (MAP) без датчика МРВ (MAF). В некоторых вариантах осуществления могут быть использованы несколько датчиков АДК (MAP), например, один датчик на ряд цилиндров, или один на цилиндр.
При стехиометрических условиях работы датчик АДК (MAP) может давать представление о значении крутящего момента двигателя. Кроме того, этот датчик, наряду с определяемой скоростью вращения двигателя, может обеспечивать оценку подаваемого в цилиндр заряда (в том числе воздуха). В одном из примеров датчик 118, который также используется в качестве датчика скорости вращения двигателя, может вырабатывать за каждый оборот коленчатого вала заранее определенное количество импульсов с равным интервалом. В другом примере контроллер 12 может осуществлять присваивание значениям сигнала АДК (MAP) от датчика 122 меток угла поворота коленчатого вала, определяемого датчиком 118, и хранящегося в памяти контроллера, или хранящегося в памяти элемента системы, соединенного с контроллером функционально (то есть, с возможностью обмена данными). Эти сохраненные значения сигнала АДК (MAP), имеющие метки угла поворота коленчатого вала, могут быть использованы для оценки заряда воздуха, подаваемого в цилиндр.
В постоянном запоминающем устройстве 106 могут быть записаны машиночитаемые данные, представляющие собой команды, исполняемые процессором 102 для реализации способов, описанных ниже в фиг. 2, а также других вариантов, которые предполагаются, но не приведены отдельно.
Контроллер 12 получает сигналы от различных датчиков, показанных на фиг. 1 (например, датчика 122 АДК (MAP)), и задействует различные исполнительные механизмы (например, топливный инжектор 66), показанные на фиг. 1, для регулирования работы двигателя на основе получаемых сигналов и команд, сохраненных в памяти контроллера.
Как описано выше, на фиг. 1 представлен один цилиндр многоцилиндрового двигателя, и каждый из цилиндров может аналогичным образом содержать свой собственный набор впускных/выпускных клапанов, топливный инжектор, свечу зажигания, и так далее. Кроме того, вышеописанные аспекты системы двигателя не являются ограничивающими, и возможны другие варианты конфигурации. Например, система может не содержать системы рециркуляции отработавших газов. В других вариантах система может дополнительно содержать турбонагнетатель, осуществляющий подачу сжатого воздуха во впускной коллектор.
Во время работы многоцилиндрового двигателя каждый цилиндр совершает четырехтактный цикл. Цикл содержит такт впуска воздуха, во время которого впускной клапан 52 открыт и выпускной клапан 54 закрыт.Воздух поступает в цилиндр 30 через впускной коллектор 44, и поршень 36 движется в сторону нижней части цилиндра с увеличением объема внутри цилиндра 30. Положение, в котором поршень 36 находится рядом с нижней точкой цилиндра и в конце своего хода (то есть, при наибольшем объеме цилиндра 30), специалистам в уровне техники обычно известен как нижняя мертвая точка НМТ (BDC, bottom dead center). Затем следует такт сжатия, при котором как впускной клапан 52, так и выпускной клапан 54, закрыты, и поршень 36 движется в сторону головки цилиндра со сжатием воздуха внутри цилиндра 30. Положение, в котором поршень 36 находится в конце своего хода, ближайшем к головке цилиндра (то есть, при наименьшем объеме цилиндра 30), специалистам в уровне техники обычно известен как верхняя мертвая точка ВМТ (TDC, top dead center). В процессе, который в дальнейшем упоминается как впрыск, в камеру сгорания поступает топливо. В процессе, который в дальнейшем упоминается как зажигание, осуществляется воспламенение впрыснутого топлива посредством известных устройств зажигания, таких как свеча 92 зажигания, в результате чего происходит сгорание. Дополнительно или в качестве альтернативы, для зажигания воздушно-топливной смеси может быть использовано сжатие. В конце такта сжатия коленчатый вал заканчивает один полный оборот для этого конкретного цилиндра, то есть он поворачивается на 360 градусов.
Во время последующего такта расширения (рабочего такта) расширяющиеся под действием реакции сгорания газы толкают поршень 36 обратно в НМТ (BDC). Коленчатый вал 40 преобразует движение поршня в крутящий момент вращающегося вала. Во время этого такта клапаны 52 и 54 остаются закрытыми. Финальный такт цикла является тактом выпуска, при котором выпускной клапан 54 открывается для высвобождения сгоревшей воздушно-топливной смеси в выпускной коллектор 48, и поршень возвращается в ВМТ (TDC). Так завершается второе вращение на 360 градусов, то есть, коленчатый вал заканчивает второй полный оборот для этого конкретного цилиндра. Следует отметить, что выше приведен лишь пример, и моменты открытия и/или закрытия впускного и выпускного клапана могут меняться, например, для обеспечения положительного или отрицательного перекрытия клапанов, позднего закрытия впускного клапана, раннего открытия впускного клапана, или различных других примеров.
Как описано выше, система может иметь возможность более точной оценки заряда воздуха для каждого из цилиндров в момент закрытия его впускного клапана ЗВК (IVC), или в наиболее близкий возможный момент измерения. Если дискретизация сигнала датчика абсолютного давления в коллекторе АДК (MAP) осуществляется в момент ЗВК (IVC), давление в цилиндре может быть практически равно АДК (MAP), поскольку впускной клапан только что был закрыт после выравнивания давления между впускным коллектором и цилиндром. Таким образом, посредством дискретизации сигнала АДК (MAP) в момент ЗВК (IVC), может быть осуществлена точная оценка заряда воздуха, подаваемого в цилиндр. Для определения количества вещества, захватываемого в цилиндре, например, в соответствии с уравнением состояния идеального газа pV=nRT, значение давления может быть учтено совместно со значением объема цилиндра. Таким образом, дискретизация АДК (MAP) в момент ЗВК (IVC), или близко к нему, обеспечивает более точное измерение давления количества вещества, захваченного в цилиндре в начале такта сжатия. Именно эта масса воздуха может быть использована для оценки количества топлива, впрыск которого может быть осуществлен в данный цилиндр.
В то время как отдельный цилиндр находится в определенном положении своего четырехтактного цикла, другие цилиндры находятся в других положениях своих собственных отдельных циклов цилиндров. Другими словами, они находятся в разных фазах. Таким образом, в то время как отдельный цилиндр может, например, только что завершить свой такт сжатия, другой цилиндр в тот же самый момент может находиться в начале своего такта сжатия, то есть быть смещен по фазе на 180 градусов относительно первого цилиндра, как видно из фиг. 3.
Если для конкретного цилиндра в начале его такта впуска угол поворота коленчатого вала составляет 360 градусам, то ЗВК (IVC) может произойти в конце этого такта, например, при 540 градусах. Определение давления воздуха посредством датчика АДК (MAP) в этот конкретный момент времени с использованием стандартных механизмов передачи сигналов датчика, например, на основе прерываний, может оказаться затратным с точки зрения вычислений. Дискретизация сигнала датчика 122 АДК (MAP) может осуществляться с выбранными временными интервалами. Поэтому маловероятно, что дискретизация сигнала датчика АДК (MAP) раз за разом осуществляется в момент ЗВК (IVC) для каждого цилиндра в многоцилиндровом двигателе. Для получения сигнала от датчика АДК (MAP) в момент ЗВК (IVC) для каждого цилиндра, каждый цикл двигателя требует прерывания контроллера и выделения ресурсов контроллера для непрерывного мониторинга наступления момента ЗВК (IVC). Такой подход может быть непрактичным и/или затратным.
По существу, дискретизация сигнала датчика АДК (MAP) при определенных интервалах приращения угла поворота коленчатого вала может способствовать определению АДК (MAP) в момент ЗВК (IVC). Эти углы определяют с помощью датчика 118 Холла, соединенного с коленчатым валом 40. Тем не менее, дискретизация сигналов датчиков при равных интервалах приращения угла поворота коленчатого вала может быть ресурсоемким и/или может приводить к ошибкам во время переходных процессов, например, при увеличивающейся скорости вращения двигателя и, соответственно, скорости вращения коленчатого вала. Надежный способ регулирования работы двигателя может быть обеспечен за счет возможности одновременных дискретизации и обработки данных о параметрах работы двигателя при равных интервалах приращения угла поворота коленчатого вала. Тем не менее, поскольку такой подход является ресурсоемким, настоящее изобретение выполняет аналогичную задачу путем первоначальной дискретизации сигнала (например, с интервалами в 1 миллисекунду) и последующей обработки (например, с приращения 240° или 120° для трехцилиндрового двигателя).
Посредством дискретизации сигнала датчика АДК (MAP) с равными временными интервалами, например, каждую миллисекунду, присваивания каждому значению сигнала метки соответствующего угла поворота коленчатого вала, размещения этих результатов в буфере данных, доступном для контроллера, и сохранения текущего заданного (или фактического) положения ЗВК (IVC), может быть обеспечена возможность контроллера по управлению и эффективной обработке данных. Заряд воздуха может быть рассчитан на основе значения АДК (MAP), как правило, один раз за период зажигания (то есть, один раз на каждое закрытие впускного клапана). Перед вычислением заряда воздуха до события впрыска топлива, контроллер может просмотреть метки углов в буфере для поиска метки угла или набора меток, наиболее близких к моменту ЗВК (IVC), и использовать соответствующие данные об АДК (MAP) для вычисления заряда воздуха, как описано ниже со ссылкой на фиг. 2. Заряд воздуха может быть использован для расчета количества впрыскиваемого топлива. В некоторых примерах, после того, как расчет количества впрыскиваемого топлива произведен, в некоторых примерах, буфер может быть очищен для ввода следующего набора значений сигнала датчика АДК (MAP), имеющих метки угла поворота коленчатого вала. В других примерах, буфер может быть буфером FIFO, в котором каждое новое значение заменяет самое старое значение в буфере. Емкость такого буфера может быть выбрана на основе наименьшего значения скорости вращения двигателя, при которой предполагается работы системы. Чем меньше скорость вращения двигателя, тем больше значений сигнала давления, имеющих метки угла поворота коленчатого вала должно быть сохранено в буфере. В одном конкретном примере, для обеспечения вышеописанных дискретизации и сохранения значений сигнала АДК (MAP) один раз каждую миллисекунду при наименьшей скорости вращения двигателя в 450 об/мин, буфер может иметь емкость в 267 значений сигнала (например, для хранения каждого значения сигнала, полученного за время цикла работы двигателя за два полных оборота коленчатого вала). Буфер может быть пропорционально меньше, если требуется только часть образцов из полного цикла работы двигателя. Например, если требуются значения сигнала только от одного цилиндра в четырехцилиндровом двигателе, будут необходимы только 67 значений сигнала. Аналогично, может потребоваться меньшее количество значений сигнала, если используется меньшая частота дискретизации.
Описанный выше механизм расчета заряда воздуха может быть использован для двигателя с непосредственным впрыском НВ (direct inject, DI), в котором топливо, как правило, впрыскивается после закрытия впускного клапана. Тем не менее, расчет заряда воздуха с использованием значений АДК (MAP) в момент закрытия впускного клапана также может иметь преимущества для двигателей с распределенным впрыском РВ (port fuel inject, PFI), в которых впрыск топлива осуществляется до закрытия впускного клапана. Оценка заряда воздуха в момент закрытия впускного клапана может быть использована для расчета относительного воздушно-топливного отношения (упоминаемого также как φ) необходимой топливно-воздушной смеси. Необходимая топливно-воздушная смесь может быть сопоставлена с фактической топливно-воздушной смесью, определяемой датчиком отработавших газов, например, универсальным датчиком кислорода в отработавших газах УДКОГ (Universal Exhaust Gas Oxygen, UEGO). Дальнейшие корректировки подачи топлива могут быть основаны на сравнении необходимого значения φ со значением φ, полученным от датчика УДКОГ (UEGO). Как описано выше, в двигателе с НВ (DI), как правило, часть топлива впрыскивается после закрытия впускного клапана. Поэтому посредством импульсов впрыска топлива после закрытия впускного клапана φ может быть отрегулирована при высокой точности измерений заряда воздуха, произведенных в момент закрытия впускного клапана или близко к нему.
На фиг. 2 представлен способ 200 определения заряда воздуха, подаваемого в цилиндр, и регулирования параметра работы двигателя на основе предшествующего определения АДК (MAP), ближайшего к моменту ЗВК (IVC). Способ 200 может быть реализован посредством команд, сохраненных в памяти контроллера, например, контроллера 12, и в сочетании с сигналами, получаемыми от датчиков системы двигателя, например, датчиков, описанных выше со ссылкой на фиг. 1 (таких как датчик 122 АДК (MAP)). Для регулирования работы двигателя контроллер может приводить в действие исполнительные механизмы двигателя системы двигателя (например, топливный инжектор 66), в соответствии со способами, описанными ниже.
На этапе 202 способ 200 содержит определение параметров работы двигателя, в том числе скорости вращения и нагрузки двигателя, барометрического давления, АДК (MAP) и МРВ (MAF), температуры в двигателе и/или в коллекторе, значения запрашиваемого водителем крутящего момента, и так далее. На этапе 204 дискретизируют выходные данные датчика АДК (MAP) с равными временными интервалами, как показано на фиг. 3. В одном из вариантов осуществления частота дискретизации датчика АДК (MAP) может быть определена как получение одного показания датчика каждую миллисекунду. В другом варианте осуществления частота дискретизации может составлять пять миллисекунд, в то время как в других вариантах осуществления частота дискретизации может отличаться или регулироваться в определенном диапазоне частот дискретизации.
На этапе 206 способ 200 содержит присваивание каждому значению сигнала метки угла поворота коленчатого вала двигателя в момент дискретизации. Угол поворота коленчатого вала может быть измерен посредством датчика Холла (например, датчика 118). Значение угла поворота используют для метки сигнала от датчика АДК (MAP). Взаимосвязь между событиями дискретизации сигнала АДК (MAP) и одновременным определением соответствующего угла поворота коленчатого вала показана на фиг. 3, и будет описана более подробно ниже. В некоторых примерах, дискретизация значений сигнала АДК (MAP) и незамедлительное присваивание им меток соответствующих им значений угла поворота коленчатого вала, происходит в течение всего времени работы двигателя. Следует отметить, что при дискретизации сигнала датчика АДК (MAP) с равными временными интервалами, частота определения угла поворота коленчатого вала зависит от скорости вращения двигателя. Если двигатель работает при высокой скорости вращения, скорость вращения коленчатого вала также высока. Ключевой период времени для определения значений АДК (MAP) в пределах такта впуска воздуха, в частности, в его конце или близко к нему, когда имеет место ЗВК (IVC). Закрытие впускного клапана, как правило, происходит в течение такта сжатия, который представляет собой окно в 180 градусов в пределах общей продолжительности четырехтактного цикла, составляющей 720 градусов. Чем выше скорость вращения двигателя, тем быстрее проходит эти 180 градусов коленчатый вал. Таким образом, при высоких скоростях вращения двигателя вероятность того, что измеренное и значение АДК (MAP) с меткой угла поворота соответствует моменту ЗВК (IVC) или непосредственно близко к нему, ниже. Напротив, для двигателя, работающего при низких скоростях вращения, эта вероятность выше. Эта динамика представлена на фиг. 4 для одного цилиндра двигателя, работающего при двух различных значениях скорости вращения двигателя.
В некоторых примерах альтернативным подходом для определения угла поворота коленчатого вала при получении значения сигнала АДК (MAP) является определение угла поворота коленчатого вала на основе значения угла поворота коленчатого вала текущего прерывания и данных о фактической угловой скорости двигателя (то есть, скорости вращения двигателя). По существу, это способ присвоения значениям сигнала АДК (MAP) приблизительных значений угла поворота коленчатого вала вместо использования более точных данных о значениях углов, получаемых путем определения/экстраполяции данных о положении двигателя.
На этапе 208 значения сигнала АДК (MAP) с метками угла поворота сохраняют в буфере. Этот буфер может находиться в памяти контроллера или в элементе системы, соединенном с нем функционально (то есть, с возможностью передачи данных). Количество значений сигнала с метками угла поворота, которое может храниться в этом буфере, зависит от скорости вращения двигателя. Как отмечено выше, чем выше скорость вращения двигателя, тем быстрее коленчатый вал повернется на 180 градусов, соответствующие такту впуска. Поскольку сигнал АДК (MAP) дискретизируют с заранее определенными равными временными интервалами, за одинаковый 180-градусный поворот коленчатого вала для двигателя с большей скоростью вращения будет получаться меньше значений АДК (MAP) с метками угла поворота, чем для двигателя с меньшей скоростью вращения. Таким образом, емкость буфера может быть определена нижней границей интервала скорости вращения двигателя во время работы двигателя, или наименьшей скоростью, при которой требуется продолжать дискретизацию, раскрытую в настоящей заявке. Максимальное количество значений сигнала АДК (MAP) с метками угла поворота, которое может быть сохранено в буфере, может быть основано на этой наименьшей скорости вращения двигателя.
Данные, которые хранятся в буфере, могут проходить одну или несколько процедур очистки буфера. В одном из вариантов осуществления, информация, относящаяся к новым значениям сигнала с метками угла поворота, поступает в начале очереди буфера, замещая самые старые значения сигнала в конце очереди. В другом варианте осуществления весь буфер может быть очищаться в конце последовательности зажигания. В других вариантах осуществления для обеспечения более точной оценки момента ЗВК (IVC) в памяти контроллера 12 могут быть сохранены более старые значения сигнала датчика АДК (MAP) с метками угла поворота коленчатого вала для двух или более предыдущих рабочих тактов. Следует отметить, что в данном примере описано использование одного буфера, но в других вариантах осуществления для каждого рабочего цилиндра может быть выделен свой собственный буфер.
На этапе 210 способ 200 содержит определение, требуется ли оценка заряда воздуха. Если заряд воздух не требуется, способ 200 продолжается на этапе 204 дискретизацией значений сигнала АДК (MAP), последующим сохранением этих значений с метками угла поворота коленчатого вала, и последующим сохранением в буфере, как описано на этапах 204, 206 и 208 соответственно. Если на этапе 210 определено, что требуется заряд воздуха, способ 200 продолжается на этапе 212 началом обработки соответствующих значений сигнала.
На этапе 212 способ 200 содержит извлечение одного или нескольких значений сигнала, имеющих метку назначенного угла поворота коленчатого вала. Например, контроллер может осуществлять поиск в буфере и определять значение (значения) сигнала АДК (MAP) с метками угла поворота, которые соответствуют назначенному значению угла поворота коленчатого вала, например, значению угла поворота коленчатого вала в момент ЗВК (IVC). Для двигателей с изменяемыми фазами кулачкового распределения, переключением профиля кулачков или другими формами изменения фаз газораспределения, контроллер осуществляет определение момента ЗВК (IVC) на основе текущего состояния или положения привода системы изменения фаз газораспределения. После выбора значения сигнала АДК (MAP), оно может быть использовано на этапе 218 для оценки заряда воздуха. Тем не менее, как было отмечено выше в описании этапа 206, вероятность того, что показание датчика АДК (MAP) будет совпадать с моментом ЗВК (IVC), зависит от скорости вращения двигателя. Поэтому в некоторых примерах момент ЗВК (IVC) может не совпадать точно ни с одним из показаний датчика АДК (MAP), что определяется по соответствующим им меткам угла поворота коленчатого вала. В таком случае вариантом, который может обеспечить более точную оценку, является выбор показания АДК (MAP), наиболее близкого к моменту ЗВК (IVC), до момента ЗВК (IVC). Для дальнейшей обработки, на этапе 214 способ 200 содержит извлечение наиболее близкого показания АДК (MAP) с меткой угла поворота, которое получено до момента ЗВК (IVC). В других вариантах осуществления, на этапе 216 способ 200 содержит определение наиболее близкого к моменту ЗВК (IVC) значения сигнала АДК (MAP) как среднего значения из двух или более наиболее близких значений сигнала АДК (MAP) до наступления момента ЗВК (ICV), определенных по соответствующим меткам угла поворота коленчатого вала. В других вариантах осуществления может быть использована экстраполяция двух или более значений сигнала АДК (MAP) с метками угла поворота коленчатого вала, наиболее близких и возникающих до наступления момента ЗВК (IVC), сохраненных в буфере, или интерполяция на основе сохраненных в буфере значений сигнала с метками угла поворота, наиболее близких к моменту ЗВК (IVC), которые содержат значения сигнала, полученные непосредственно до и после момента ЗВК (IVC). Кроме того, для уточнения определения значения АДК (MAP) для указанного цилиндра в момент ЗВК (IVC) с целью оценки заряда воздуха, в других вариантах осуществления могут быть использованы значения сигнала с метками угла поворота, полученные в двух или более предыдущих циклах зажигания отдельного цилиндра, в сочетании с текущими значениями АДК (MAP) с метками угла поворота, определяемыми на этапе 214.
На этапе 218 посредством использования значения АДК (MAP), определенного на этапе 212, оценивают заряд воздуха. Заряд воздуха может быть оценен с использованием значения давления в коллекторе, определенного на этапе 212, путем учета совместно со значением объема цилиндра, для определения количества захваченного в цилиндре вещества в соответствии с уравнением состояния идеального газа pV=nRT. В качестве альтернативы, для оценки заряда воздуха на основе известного значения АДК (MAP) могут быть использованы таблицы соответствия значений АДК (MAP) и заряда воздуха, подаваемого в цилиндр, или другие подходящие способы. После того, как заряд воздуха рассчитан, на этапе 220 способ 200 содержит регулирование выбранного параметра работы двигателя. Этим параметром работы двигателя может быть количество впрыскиваемого в камеру цилиндра топлива, например, с целью достижения в камере сгорания стехиометрического отношения топлива к воздуху. Тем не менее, также может осуществляться регулирование других параметров работы двигателя, например, положения клапана РОГ (EGR), фаз газораспределения впускного и/или выпускного клапана, давления наддува или другого подходящего параметра.
Если параметром работы двигателя является количество топлива, впрыскиваемого в камеру цилиндра для достижения желаемого крутящего момента при сгорании в цилиндре стехиометрической воздушно-топливной смеси, в первую очередь рассчитывают массу воздуха и рециркулируемых отработавших газов, поступающих в цилиндр, с использованием описанного выше алгоритма скорости вращения-плотности. Затем по значению разности давлений по обе стороны от клапана 142 РОГ (EGR) рассчитывают массу рециркулируемых газов, и результат вычитают из количества воздуха и отработавших газов, поступающих в цилиндр, для обеспечения подачи в цилиндр свежего воздуха. Затем рассчитывают требуемое значение количества топлива для достижения стехиометрических условий в цилиндре, и подача требуемого количества топлива осуществляется посредством активации топливного инжектора на время, необходимое для подачи этого количества топлива, с учетом температуры и давления топлива. Требуемое время активации обеспечивается посредством электрического импульса, приводящего в действие топливный инжектор. После этого способ 200 возвращается к началу.
Работа двигателя 10, в частности, порядок зажигания, описана далее со ссылкой на фиг. 3, на которой представлены диаграммы 300 моментов зажигания для четырех цилиндров двигателя 10. Для каждой диаграммы номер цилиндра показан на оси ординат и такты цилиндра двигателя показаны на оси абсцисс. Кроме того, зажигание и соответствующее событие сгорания в каждом цилиндре показано звездочкой между тактами сжатия и рабочими тактами цилиндра. Сгорание в двигателе 10 может осуществляться в следующем порядке зажигания: 1-3-2-4 (или 2-4-1-3 или 3-2-4-1 или 4-1-3-2, поскольку зажигание циклично) с равными интервалами, то есть каждые 180° угла поворота коленчатого вала может осуществляться сгорание в одном цилиндре. Ось абсцисс диаграммы момента зажигания для каждого цилиндра показана относительно углов поворота коленчатого вала, показанных на втором снизу графике на фиг. 3, с началом рабочего цикла цилиндра 3, установленным на 0 градусов. Поскольку все четыре цилиндра находятся в разных фазах по отношению друг к другу, величина угла в 0 градусов соответствует началу цикла сжатия для цилиндра 2, началу такта впуска для цилиндра 4 и началу такта выпуска для цилиндра 1, соответственно. Под диаграммой для цилиндра 3 есть дополнительная диаграмма, показывающая дискретизацию сигнала АДК (MAP) с равными временными интервалами. Сбор данных об этих значениях сигнала АДК (MAP) происходит постоянно, например один раз в миллисекунду. Давление, определяемое датчиком 122 в коллекторе, используется для всех четырех цилиндров.
Первый такт, показанный на фиг. 3, начинающийся при угле поворота коленчатого вала в 180 градусов, демонстрирует, что в цилиндре 2 происходит такт сжатия, в конце которого происходит зажигание, как показано звездочкой. Одновременно, в цилиндре 4, цилиндре 1 и цилиндре 3 происходят такт впуска, выпуска и рабочий такт, соответственно. Вся эта последовательность повторяется по мере продвижения циклов каждого цилиндра в правую сторону на фиг. 3, в направлении следующего соответствующего такта в четырехтактном цикле. Ход впускного клапана для цилиндров 2, 4, 1 и 3 показан кривыми 302, 304, 306 и 308, соответственно, которые иллюстрируют открытие соответствующих впускных клапанов во время каждого такта впуска.
Кривая 310 показывает угол поворота коленчатого вала, при котором происходит ЗВК (IVC) цилиндра 3. Это событие совпадает с дискретизацией АДК (MAP) в момент времени 314. Значение угла в момент 310 используется для пометки значения сигнала АДК (MAP) в момент 314, как описано в способе 200 на этапе 206, поэтому значение 314 сигнала АДК (MAP) используют для расчета заряда воздуха, как описано для этапов 218 и 220 способа 200. С другой стороны, в конце такта впуска в цилиндре 1, то есть в момент 312 ЗВК (IVC), значений сигнала АДК (MAP), точно совпадающих с моментом ЗВК (IVC) нет, и наиболее близким к моменту ЗВК (IVC) значением сигнала АДК (MAP) является значение 316 сигнала. В данном примере значение 316 сигнала может быть использовано для расчета заряда воздуха. Как описано выше в отношении способа 200, наиболее близкое к моменту ЗВК (IVC) значение сигнала АДК (MAP) может быть определено и использовано для расчета заряда воздуха. В других вариантах осуществления для определения наилучшего значения сигнала АДК (MAP) могут быть использованы значения сигнала АДК (MAP), полученные в момент 316, и непосредственно предшествующие ему, например, как описано для этапа 216 способа 200.
Поскольку скорость вращения двигателя меняется, поворот коленчатого вала на 180 градусов, соответствующий такту сжатия, может занять различное количество времени, например, при низкой скорости вращения двигателя такт сжатия может иметь большую продолжительность, чем при высокой скорости вращения двигателя. Это видно на примере фиг. 4, на которой представлено сравнение выборки значений сигнала АДК (MAP), полученных непосредственно до момента ЗВК (IVC), для одного цилиндра при двух различных скоростях вращения двигателя. На фиг. 4 представлена первая диаграмма 400 подъема клапанов и дискретизации сигнала АДК (MAP) при первой, более низкой скорости вращения двигателя, а также представлена вторая диаграмма 410 подъема клапанов и дискретизации сигнала АДК (MAP) при второй, более высокой скорости вращения двигателя.
Поскольку подъем впускного клапана изменяется по собственному циклу (то есть, клапан открывается и закрывается), конец этого цикла (когда впускной клапан закрывается) называют ЗВК (IVC). Частота открытий и закрытий впускного клапана пропорциональна скорости вращения двигателя. На диаграмме 400 двигатель работает при низкой скорости вращения, в то время как на диаграмме 410 двигатель работает при высокой скорости вращения. В обоих случаях представлены три независимые выборки значений сигнала АДК (MAP) в виде трех рядов кружков, показывающих последовательности дискретизации сигнала АДК (MAP) незадолго до момента ЗВК (IVC). Заштрихованные кружки показывают события дискретизации для текущего цикла зажигания, в то время как пунктирные кружки и незаштрихованные кружки показывают события дискретизации сигнала АДК (MAP) для двух предыдущих циклов зажигания. Следует понимать, что значения сигнала АДК (MAP) приведены только в целях иллюстрации и показаны в виде трех отдельных рядов для ясности и в целях сравнения трех выборок значений сигнала между собой. Следует отметить, что при любой скорости вращения двигателя большинство последовательностей дискретизации сигнала АДК (MAP) таковы, что время дискретизации сигнала АДК (MAP) не совпадает с ЗВК (IVC). Другими словами, интервал между ЗВК (IVC) и наиболее близким событием дискретизации сигнала АДК (MAP) является переменным. Кроме того, угловое расстояние между событиями дискретизации сигнала АДК (MAP) на диаграмме 400 для низких скоростей вращения двигателя меньше, чем для соответствующей последовательности на диаграмме 410, для высоких скоростей вращения двигателя. Как обсуждалось ранее, тот факт, что при низких скоростях вращения двигателя происходит больше дискретизаций сигнала АДК (MAP), влияет на емкость буфера на этапе 208. Минимальная емкость буфера может быть определена наименьшей скоростью, при которой двигатель, вероятно, будет работать.
Частота, с которой впускной клапан проходит свой цикл открытий и закрытий, также зависит от скорости вращения двигателя. Подъем впускного клапана в такте впуска воздуха при низкой скорости вращения двигателя (например, 500 об/мин) представлен кривой 402. Этот процесс перемещения клапана (например, от открытия к закрытию) происходит при меньшей скорости, нежели соответствующий процесс впускного клапана при более высоких скоростях вращения двигателя (например, 2000 об/мин), как показано кривой 412. Следовательно, для значений сигнала АДК (MAP), дискретизированных с равными временными интервалами, последовательность дискретизации сигнала для низких скоростей вращения двигателя является более плотной, чем для высоких скоростей вращения двигателя, как показано двумя группами кружков на диаграммах 400 и 410, соответственно. Поскольку двигатель на диаграмме 400 имеет более плотную последовательность дискретизации сигнала, она с большей долей вероятности содержит значение сигнала АДК (MAP), более приближенное к параметрам АДК (MAP) в момент ЗВК (IVC), чем в случае двигателя с менее плотной последовательностью дискретизации сигнала АДК (MAP), представленной на диаграмме 410. Например, все три выборки значений сигнала АДК (MAP), показанные на диаграмме 400, содержат значения сигнала АДК (MAP), получаемые при достижении порогового диапазона (Т) угла поворота коленчатого вала (УПКВ) для ЗВК (IVC), или внутри этого диапазона.
Как описано выше в отношении способа 200, для расчета заряда воздуха выбирают значения сигнала АДК (MAP), хранящиеся в буфере с метками угла поворота коленчатого вала, которые либо совпадают с моментом ЗВК (IVC), либо являются наиболее близкими, предшествующими ЗВК (IVC), значениями. Интервал между моментами дискретизации сигнала АДК (MAP), соответствующими показаниям АДК (MAP) на графике 400, как показано для трех последовательных циклов впуска, показывает, что вероятный интервал между ЗВК (IVC) и ближайшим показанием АДК (MAP), предшествующим ЗВК (IVC), меньше соответствующих интервалов для более высоких скоростей вращения двигателя, показанных на графике 410. Например, одна из трех выборок значений сигнала АДК (MAP), представленных на графике 410, содержит значение сигнала АДК (MAP), получаемое вне порогового диапазона (Т) угла поворота коленчатого вала, соответствующего ЗВК (IVC). Это значение сигнала может привести к менее точной оценке заряда воздуха, нежели значения сигнала, попадающие в пороговый диапазон.
Таким образом, значение сигнала АДК (MAP), полученное при низкой скорости вращения двигателя, может обеспечивать более близкую к параметрам АДК (MAP) в момент ЗВК (IVC) аппроксимацию, по сравнению со значениями сигнала АДК (MAP), полученными при более высокой скорости вращения двигателя. Интервал между значениями сигнала АДК (MAP) для двигателей с большой скоростью вращения на диаграмме 410 больше, и вероятность того, что этот интервал также больше между наиболее близким к ЗВК (IVC) значением АДК (MAP) и значением АДК (MAP) в момент ЗВК (IVC), больше. Поэтому, в некоторых примерах, для более высоких значений скорости вращения двигателя оценка заряда воздуха на основе значения АДК (MAP) может быть скорректирована. Например, при более высокой скорости вращения двигателя, значение АДК (MAP) в момент ЗВК (IVC) может быть рассчитано на основе выборки значений АДК (MAP) для предыдущего цикла работы двигателя, причем значение АДК (MAP) в момент ЗВК (IVC) может быть рассчитано на основе двух или более значений сигнала АДК (MAP), полученных до и/или после момента ЗВК (IVC), или на основе другого подходящего механизма оценки значения сигнала АДК (MAP) в момент ЗВК (IVC).
В свою очередь, точное определение давления воздуха в коллекторе в момент закрытия впускного клапана способствует более точной оценке заряда воздуха, подаваемого в цилиндр. Заряд воздуха, оцененный таким образом, обеспечивает более эффективное регулирование параметров работы двигателя, таких, как количество впрыскиваемого в цилиндр топлива. В раскрытом способе осуществляется дискретизация сигнала АДК (MAP) с равными временными интервалами, присваивание значениям этого сигнала меток соответствующего угла поворота коленчатого вала, и сохранение этих значений сигнала в буфере. Способ дополнительно содержит поиск значений в буфере для определения наиболее близкого к моменту ЗВК (IVC) значения сигнала АДК (MAP), если от системы двигателя поступает запрос на подачу заряда воздуха. Установленное (или рассчитанное) значение АДК (MAP) может быть использовано для оценки заряда воздуха, подаваемого в цилиндр, с целью регулирования параметра работы двигателя, например, количества впрыскиваемого в цилиндр топлива.
Технический эффект определения заряда воздуха посредством извлечения из буфера значения (или множества значений) сигнала АДК (MAP с метками угла поворота коленчатого вала состоит в оценке значения АДК (MAP), которое является наиболее близким к моменту ЗВК (IVC), для регулирования параметров работы двигателя.
Предложен способ, содержащий дискретизацию сигнала датчика давления во впускном коллекторе с равными временными интервалами, сохранение каждого значения дискретизированного сигнала в буфере, обработку значений дискретизированного сигнала, хранящихся в буфере, при равных интервалах приращения угла поворота коленчатого вала, и регулирование параметра работы двигателя на основе значения сигнала, выбранного из всех обработанных значений дискретизированного сигнала. Первый пример способа содержит вариант, в котором регулирование параметра работы двигателя на основе одного значения сигнала, выбранного из обработанных значений дискретизированного сигнала, содержит регулирование количества впрыскиваемого топлива на основе одного значения сигнала, выбранного из обработанных значений дискретизированного сигнала. Второй пример способа, в вариантах, содержит первый пример, и дополнительно содержит вариант, в котором обработка сохраненных в буфере значений дискретизированного сигнала с равными приращениями угла поворота коленчатого вала содержит обработку сохраненных значений дискретизированного сигнала с частотой зажигания в двигателе. Третий пример способа, в вариантах, может содержать один или оба из первого и второго примеров, и дополнительно может содержать вариант, в котором до сохранения каждого значения дискретизированного сигнала в буфере, каждому значению дискретизированного сигнала присваивают метку угла поворота коленчатого вала двигателя, который соответствует углу поворота коленчатого вала двигателя в момент дискретизации сигнала. Четвертый пример способа, в вариантах, может содержать один или более или каждый из примеров с первого по третий, и дополнительно может содержать вариант, в котором обработка сохраненных в буфере значений дискретизированного сигнала с равными приращениями угла поворота коленчатого вала двигателя содержит выбор из буфера значения дискретизированного сигнала, имеющего метку угла поворота коленчатого вала двигателя, который соответствует углу поворота коленчатого вала двигателя при назначенном значении угла поворота коленчатого вала двигателя, или до него, обработку выбранного значения дискретизированного сигнала для определения давления во впускном коллекторе, и регулирование количества впрыскиваемого топлива на основе оценки заряда воздуха, рассчитываемой на основе определенного давления во впускном коллекторе. Пятый пример способа, в вариантах, может содержать один или более или каждый из примеров с первого по четвертый, и дополнительно может содержать вариант, в котором назначенный угол поворота коленчатого вала двигателя представляет собой угол поворота коленчатого вала двигателя в момент закрытия впускного клапана для данного цилиндра двигателя, и способ дополнительно содержит впрыск топлива в данный цилиндр в скорректированном количестве. Шестой пример способа, в вариантах, может содержать один или более или каждый из примеров с первого по пятый, и дополнительно может содержать вариант, в котором выбор из буфера значения дискретизированного сигнала, имеющего метку угла поворота коленчатого вала двигателя, который соответствует углу поворота коленчатого вала двигателя в момент закрытия впускного клапана, или до него, содержит выбор из буфера значения дискретизированного сигнала, имеющего метку угла поворота коленчатого вала двигателя, наиболее близкого по значению к углу поворота коленчатого вала двигателя в момент закрытия впускного клапана, по отношению ко всем остальным значениям сигнала в буфере.
Вариант осуществления способа содержит дискретизацию сигнала датчика давления во впускном коллекторе с определенными временными интервалами для создания выборки значений сигнала, содержащей множество значений, присваивание каждому значению сигнала в выборке метки угла поворота коленчатого вала двигателя, и регулирование впрыска топлива на основе величины заряда впускного воздуха, оцениваемого на основе выбранного значения сигнала из выборки значений, в ответ на запрос на впрыск топлива, причем выбранное значение сигнала имеет метку угла поворота коленчатого вала двигателя, равного или предшествующего назначенному углу поворота коленчатого вала двигателя. В первом варианте способа выбранное значение сигнала имеет метку угла поворота коленчатого вала двигателя, ближайшего к назначенному углу поворота коленчатого вала двигателя, по сравнению со всеми другими значениями сигнала в выборке значений. Второй пример способа, в вариантах, может содержать первый пример, и дополнительно может содержать вариант, в котором запрос на впрыск топлива содержит запрос на впрыск топлива в данный цилиндр двигателя, и причем выбранное значение сигнала имеет метку угла поворота коленчатого вала двигателя, соответствующего или предшествующего углу поворота коленчатого вала двигателя при закрытии впускного клапана для данного цилиндра. Третий пример способа, в вариантах, может содержать один или оба из первого и второго примеров, и дополнительно может содержать вариант, в котором присваивание каждому значению из выборки значений метки угла поворота коленчатого вала двигателя содержит, для данного значения сигнала, извлечение значения угла поворота коленчатого вала двигателя в момент времени, когда данному значению сигнала была присвоена метки, и присваивание данному значению метки извлеченного значения угла поворота коленчатого вала. Четвертый пример способа, в вариантах, может содержать один или более или каждый из примеров с первого по третий, и дополнительно может содержать сохранение выборки значений в буфере памяти контроллера, функционально соединенного с датчиком давления во впускном коллекторе. Пятый пример способа, в вариантах, может содержать один или более или каждый из примеров с первого по четвертый, и дополнительно может содержать удаление оставшихся значений сигнала из выборки значений, хранящихся в буфере, после регулирования впрыска топлива на основе величины впускного заряда воздуха, оцениваемого на основе выбранного значения сигнала.
Система содержит двигатель со множеством цилиндров, выполненных с возможностью подачи в них воздуха из впускного коллектора, датчик давления в коллекторе, соединенный со впускным коллектором, и контроллер с сохраненными командами, которые, при их выполнении, могут обеспечивать выполнение контроллером дискретизации сигнала от датчика давления в коллекторе с определенной частотой дискретизации. Дополнительно в контроллере сохранены команды, которые, при их выполнении, могут обеспечивать, для каждого значения сигнала, присваивание контроллером значению сигнала метки соответствующего угла поворота коленчатого вала двигателя, хранение каждого значения сигнала с меткой в буфере, извлечение из буфера значения сигнала, имеющего метку угла поворота коленчатого вала, который соответствует значению угла поворота коленчатого вала двигателя вблизи события закрытия впускного клапана цилиндра, в ответ на запрос на впрыск топлива в цилиндр множества цилиндров, и регулирование количества впрыскиваемого топлива на основе оценки заряда воздуха, причем оценка заряда воздуха осуществляется на основе извлеченного значения сигнала. В первом примере системы извлеченное значение сигнала имеет метку угла поворота коленчатого вала, который наиболее близок к значению угла поворота коленчатого вала двигателя в момент закрытия впускного клапана, по сравнению со всеми другими значениями в буфере. Второй пример системы, в вариантах, может содержать первый пример, и дополнительно может содержать вариант, в котором извлеченное значение сигнала имеет метку угла поворота коленчатого вала, который раньше угла поворота коленчатого вала двигателя в момент закрытия впускного клапана. Третий пример способа, в вариантах, может содержать один или оба из первого и второго примеров и дополнительно может содержать вариант, в котором извлеченное значение сигнала имеет метку угла поворота коленчатого вала, который соответствует последнему перед моментом закрытия впускного клапана значению угла поворота коленчатого вала двигателя. Четвертый пример способа, в вариантах, может содержать один или более или каждый из примеров с первого по третий, и дополнительно может содержать вариант, в котором извлеченное значение сигнала является первым значением сигнала, имеющим метку угла поворота коленчатого вала, который наиболее близок к значению угла поворота коленчатого вала двигателя в момент закрытия впускного клапана, по сравнению со всеми другими значениями в буфере, и причем контроллер дополнительно содержит команды, которые, при их выполнении, обеспечивают извлечение контроллером из буфера второго значения сигнала, имеющего метку второго угла поворота коленчатого вала, имеющего место перед или после угла для первого значения сигнала, и регулирование количества впрыскиваемого топлива на основе оценки заряда воздуха, причем оценка заряда воздуха происходит на основе извлеченных первого значения сигнала и второго значения сигнала. Пятый пример способа, в вариантах, может содержать один или более или каждый из примеров с первого по четвертый, и дополнительно может содержать вариант, в котором двигатель является двигателем непосредственного впрыска, и причем регулирование количества впрыскиваемого топлива предназначено для события впрыска топлива, происходящего в текущем цикле двигателя. Шестой пример способа, в вариантах, может содержать один или более или каждый из примеров с первого по пятый, и дополнительно может содержать вариант, в котором двигатель является двигателем с распределенным впрыском топлива, и причем регулирование количества впрыскиваемого топлива предназначено для события впрыска топлива, происходящего в последующем цикле двигателя.
Необходимо отметить, что примеры приведенных здесь алгоритмов управления и оценки могут использоваться с различными конфигурациями систем двигателей и/или транспортных средств. Раскрытые в настоящей заявке способы и алгоритмы управления могут храниться в виде исполняемых команд в долговременной памяти, и могут исполняться системой управления, содержащей контроллеры в сочетании с различными датчиками, приводами и другими компонентами двигателя. Раскрытые в настоящей заявке конкретные алгоритмы могут представлять собой одну или любое количество стратегий обработки, таких как управляемые событиями, управляемые прерываниями, многозадачные, многопотоковые и тому подобные. Таким образом, различные описанные действия, процессы и/или функции могут быть выполнены в указанной последовательности, параллельно, или, в некоторых случаях, могут быть опущены. Аналогично, такой порядок обработки не обязателен для достижения преимуществ и реализации признаков раскрытых в настоящей заявке примеров осуществления, но приведен для простоты графического представления и описания. Одно или несколько описанных действий, процессов и/или функций могут быть выполнены повторно в зависимости от конкретной используемой стратегии. Более того, описанные действия, процессы и/или функции могут графически представлять код, программируемый в долговременной памяти машиночитаемого носителя данных в системе управления двигателем, в которой описанные действия реализуются посредством исполнения команд в системе, причем раскрытые действия выполняются путем исполнения инструкций в системе, содержащей различные аппаратные компоненты двигателя в сочетании с электронным контроллером.
Следует понимать, что конфигурации и последовательности, раскрытые в данном документе, являются по своей сути примерами, и эти конкретные варианты осуществления не должны быть восприняты в ограничивающем значении, поскольку возможно множество модификаций. Например, вышеупомянутая технология может быть применена к V-образному шестицилиндровому, рядному четырехцилиндровому, рядному шестицилиндровому, V-образному двенадцатицилиндровому, оппозитному четырехцилиндровому и другим типам двигателей. Объем настоящего изобретения содержит все неизвестные и неочевидные сочетания и частичные сочетания различных систем, конфигураций, и других признаков, функций и/или свойств, раскрытых в данном документе.
В последующих пунктах формулы изобретения конкретно указаны определенные сочетания и частичные сочетания, которые следует считать новыми и неочевидными. Эти пункты формулы могут ссылаться на «элементы» или «первые элементы», или их эквиваленты. Такие пункты формулы следует считать содержащими возможность наличия одного или нескольких таких элементов, но не требующими наличия и не исключающими возможность наличия двух или большего количества таких элементов. Другие сочетания или частичные сочетания раскрытых признаков, функций, элементов и/или свойств могут быть заявлены посредством внесения поправок в настоящие пункты формулы или через включение новых пунктов формулы в настоящую или связанную заявку. Такие пункты формулы, вне зависимости от того, шире, уже, эквивалентные или отличные от исходных пунктов формулы изобретения, также включены в объем настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ (варианты) и система для регулирования подачи топлива в двигатель и крутящего момента | 2017 |
|
RU2679367C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА ДВИГАТЕЛЯ | 2015 |
|
RU2667825C2 |
| СПОСОБ СНЯТИЯ ДАННЫХ (ВАРИАНТЫ) И СИСТЕМА СНЯТИЯ ДАННЫХ ДАВЛЕНИЯ ВО ВПУСКНОМ ОКНЕ ЦИЛИНДА | 2012 |
|
RU2584747C2 |
| СПОСОБ РАБОТЫ ДВИГАТЕЛЯ (ВАРИАНТЫ), СИСТЕМА УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 2013 |
|
RU2640146C2 |
| ОБНАРУЖЕНИЕ ПРОПУСКОВ ЗАЖИГАНИЯ ПО ВИБРАЦИЯМ КОЛЕНЧАТОГО ВАЛА | 2015 |
|
RU2710330C2 |
| СПОСОБ ДЛЯ ЗАПУСКА ДВИГАТЕЛЯ | 2015 |
|
RU2669890C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ПОВЫШЕНИЯ ТОЧНОСТИ В ОТНОШЕНИИ КОЛИЧЕСТВА ПОДАВАЕМОГО ТОПЛИВА | 2016 |
|
RU2725597C2 |
| Способ подачи топлива в двигатель | 2016 |
|
RU2719504C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ОЦЕНКИ ЗАРЯДА ВОЗДУХА | 2015 |
|
RU2697016C2 |
| СПОСОБ ЗАПУСКА ДВИГАТЕЛЯ, СПОСОБ ДЛЯ ДВИГАТЕЛЯ (ВАРИАНТЫ) И СИСТЕМА | 2012 |
|
RU2611121C2 |
Изобретение относится к системам управления двигателями внутреннего сгорания, а именно к регулированию потока воздуха в цилиндр двигателя. Техническим результатом является обеспечение точной оценки заряда воздуха при минимизации вычислительной мощности, необходимой для оценки заряда воздуха. Результат достигается тем, что обеспечены способы и системы для оценки заряда воздуха, подаваемого в цилиндр, на основе значений сигнала давления в коллекторе, хранящихся в буфере, для регулирования параметра работы двигателя. В одном из примеров способ может содержать дискретизацию сигнала датчика давления во впускном коллекторе с равными временными интервалами, присвоение им метки соответствующего угла поворота коленчатого вала и их сохранение в буфере. Значение сигнала, наиболее близкого к моменту закрытия впускного клапана цилиндра, может быть использовано для расчета подаваемого в него заряда воздуха. 3 н. и 17 з.п. ф-лы, 4 ил.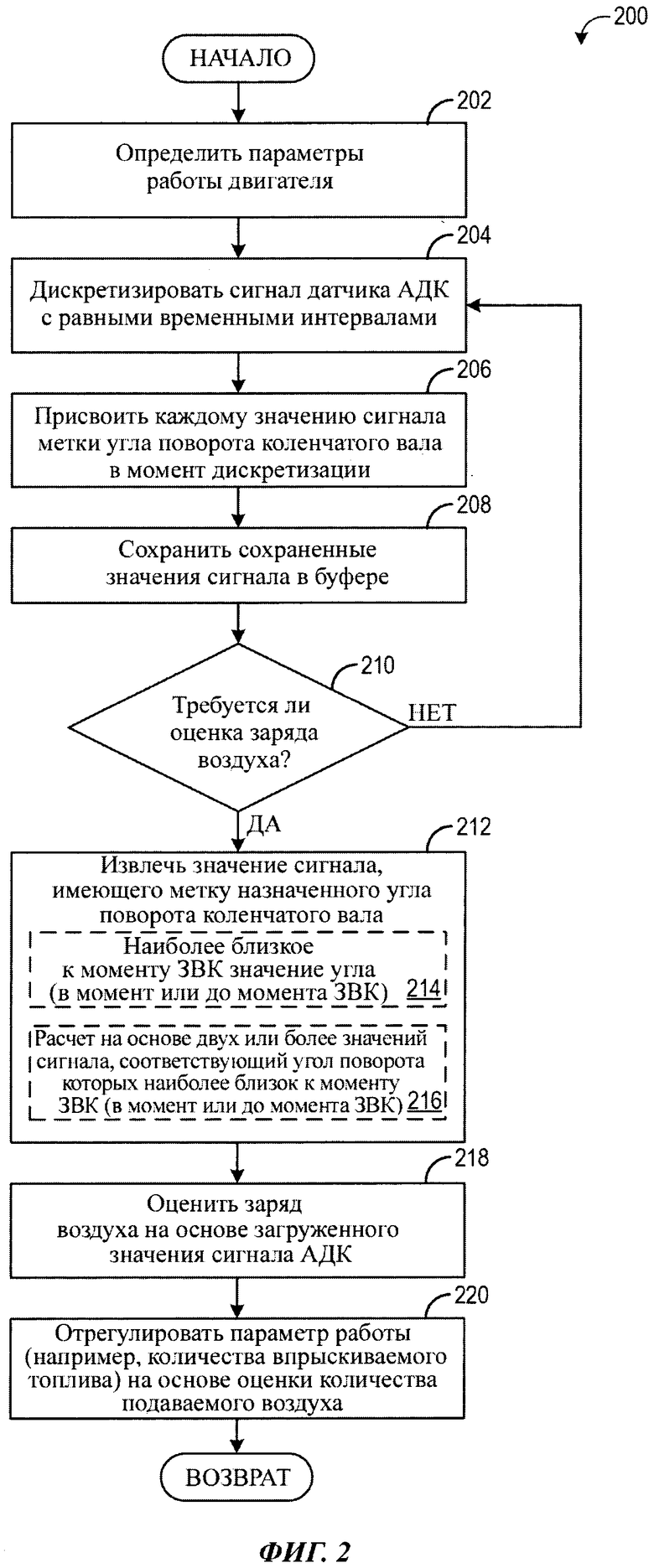
1. Способ, содержащий этапы, на которых:
дискретизируют сигнал датчика давления во впускном коллекторе с заранее заданными равными временными интервалами, причем заранее заданные равные временные интервалы не зависят от частоты вращения двигателя;
значению дискретизированного сигнала присваивают метку угла поворота коленчатого вала двигателя, который соответствует углу поворота коленчатого вала двигателя в момент дискретизации сигнала;
после присвоения метки сохраняют каждое имеющее метку значение дискретизированного сигнала в буфере, причем емкость буфера зависит от частоты вращения двигателя;
обрабатывают хранящиеся в буфере значения дискретизированного сигнала с равными приращениями угла поворота коленчатого вала двигателя на основе метки угла поворота коленчатого вала двигателя; и
регулируют параметр работы двигателя на основе одного значения сигнала, выбранного из обработанных значений дискретизированного сигнала.
2. Способ по п. 1, отличающийся тем, что регулирование параметра работы двигателя на основе одного значения сигнала, выбранного из обработанных значений дискретизированного сигнала, содержит регулирование количества впрыскиваемого топлива на основе одного значения сигнала, выбранного из обработанных значений дискретизированного сигнала.
3. Способ по п. 1, отличающийся тем, что обработка хранящихся в буфере значений дискретизированного сигнала с равными приращениями угла поворота коленчатого вала двигателя на основе метки угла поворота коленчатого вала двигателя содержит обработку хранящихся значений дискретизированного сигнала с частотой зажигания в двигателе.
4. Способ по п. 2, отличающийся тем, что способ предназначен для двигателя, содержащего множество цилиндров, каждый из которых связан по меньшей мере с одним из множества датчиков давления, и причем дискретизация сигнала датчика давления во впускном коллекторе с заранее заданными равными временными интервалами включает дискретизацию одного или более сигналов датчика давления из по меньшей мере одного из множества датчиков давления, связанных с каждым из цилиндров, с заранее заданными равными временными интервалами.
5. Способ по п. 4, отличающийся тем, что обработка хранящихся в буфере значений дискретизированного сигнала с равными приращениями угла поворота коленчатого вала двигателя на основе метки угла поворота коленчатого вала двигателя, содержит следующие этапы:
выбирают из буфера значение дискретизированного сигнала, имеющего метку угла поворота коленчатого вала двигателя, который соответствует углу поворота коленчатого вала двигателя, равному или предшествующему назначенному углу поворота коленчатого вала двигателя; и
обрабатывают выбранное значение дискретизированного сигнала для определения давления во впускном коллекторе;
причем регулирование количества впрыскиваемого топлива содержит регулирование количества впрыскиваемого топлива на основе оценки заряда воздуха, рассчитываемой на основе определенного давления во впускном коллекторе.
6. Способ по п. 5, отличающийся тем, что назначенный угол поворота коленчатого вала двигателя представляет собой угол поворота коленчатого вала двигателя в момент закрытия впускного клапана для данного цилиндра двигателя, причем способ дополнительно содержит впрыск топлива в данный цилиндр в откорректированном количестве впрыскиваемого топлива.
7. Способ по п. 6, отличающийся тем, что выбор из буфера значения дискретизированного сигнала, имеющего метку угла поворота коленчатого вала двигателя, который соответствует углу поворота коленчатого вала двигателя в момент закрытия впускного клапана или до него, содержит выбор из буфера значения дискретизированного сигнала, имеющего метку угла поворота коленчатого вала двигателя, который наиболее близок по значению к углу поворота коленчатого вала двигателя в момент закрытия впускного клапана, по сравнению со всеми остальными значениями сигнала в буфере.
8. Способ для двигателя, содержащий этапы, на которых:
дискретизируют сигнал датчика давления во впускном коллекторе с определенными временными интервалами для создания выборки значений, содержащей множество значений сигнала, причем выборку значений сохраняют в буфере, причем емкость буфера определяют на основе частоты вращения двигателя, и причем определенные временные интервалы не зависят от частоты вращения двигателя;
присваивают каждому значению сигнала из выборки значений метку угла поворота коленчатого вала двигателя; и
в ответ на запрос на впрыск топлива, регулируют впрыск топлива на основе величины заряда впускного воздуха, оцениваемой на основе выбранного значения сигнала из выборки значений, причем выбранное значение сигнала имеет метку угла поворота коленчатого вала двигателя, равного или предшествующего назначенному углу поворота коленчатого вала двигателя.
9. Способ по п. 8, отличающийся тем, что выбранному значению сигнала соответствует метка угла поворота коленчатого вала двигателя, наиболее близкого к назначенному углу поворота коленчатого вала двигателя, по сравнению со всеми другими значениями сигнала в выборке значений.
10. Способ по п. 8, отличающийся тем, что запрос на впрыск топлива содержит запрос на впрыск топлива в данный цилиндр двигателя, причем выбранное значение сигнала имеет метку угла поворота коленчатого вала двигателя, равного или предшествующего углу поворота коленчатого вала, соответствующему закрытию впускного клапана для данного цилиндра.
11. Способ по п. 8, отличающийся тем, что присвоение каждому значению сигнала из выборки значений метки угла поворота коленчатого вала двигателя содержит, для данного значения сигнала, извлечение значения угла поворота коленчатого вала двигателя в момент времени, когда данное значение сигнала было дискретизировано, и присвоение данному значению сигнала метки извлеченного угла поворота коленчатого вала двигателя.
12. Способ по п. 8, отличающийся тем, что дополнительно сохраняют выборку значений в буфере памяти контроллера, функционально соединенного с датчиком давления во впускном коллекторе.
13. Способ по п. 12, отличающийся тем, что дополнительно, после регулирования впрыска топлива на основе величины впускного заряда воздуха, оцениваемого на основе выбранного значения сигнала, удаляют из буфера оставшиеся значения сигнала из выборки значений.
14. Система, содержащая:
двигатель с множеством цилиндров, выполненных с возможностью подачи в них воздуха из впускного коллектора;
датчик давления в коллекторе, соединенный с впускным коллектором; и
контроллер с сохраненными командами, которые, при их выполнении, обеспечивают выполнение контроллером следующих действий:
дискретизация сигнала от датчика давления во впускном коллекторе с определенной частотой дискретизации, причем определенная частота дискретизации не зависит от частоты вращения двигателя;
присваивание значению сигнала метки соответствующего угла поворота коленчатого вала двигателя для каждого значения сигнала;
сохранение каждого значения сигнала с меткой в буфере, причем емкость буфера определяется на основе частоты вращения двигателя;
в ответ на запрос на впрыск топлива в цилиндр множества цилиндров, извлечение из буфера значения сигнала, имеющего метку угла поворота коленчатого вала, соответствующего углу поворота коленчатого вала двигателя в момент времени, близкий к закрытию впускного клапана цилиндра; и
регулирование количества впрыскиваемого топлива на основе оценки заряда воздуха, причем оценка заряда воздуха определена на основе извлеченного значения сигнала.
15. Система по п. 14, отличающаяся тем, что извлеченное значение сигнала имеет метку угла поворота коленчатого вала, наиболее близкого к значению угла поворота коленчатого вала двигателя в момент закрытия впускного клапана, по сравнению со всеми другими значениями сигнала в буфере.
16. Система по п. 15, отличающаяся тем, что извлеченное значение сигнала имеет метку угла поворота коленчатого вала, предшествующего углу поворота коленчатого вала двигателя в момент закрытия впускного клапана.
17. Система по п. 14, отличающаяся тем, что извлеченное значение сигнала имеет метку угла поворота коленчатого вала, соответствующего последнему значению угла поворота коленчатого вала двигателя до момента закрытия впускного клапана.
18. Система по п. 14, отличающаяся тем, что извлеченное значение сигнала является первым значением сигнала, имеющим метку угла поворота коленчатого вала, который наиболее близок к значению угла поворота коленчатого вала двигателя в момент закрытия впускного клапана, по сравнению со всеми остальными значениями сигнала в буфере, и причем контроллер содержит дополнительные команды, которые, при их выполнении, обеспечивают выполнение контроллером следующих действий:
если скорость вращения двигателя превышает пороговое значение скорости вращения двигателя, в ответ на запрос на впрыск топлива в цилиндр множества цилиндров, извлечение из буфера второго значения сигнала, которому соответствует метка второго угла поворота коленчатого вала, имеющего место перед или после угла для первого значения сигнала; и
регулирование количества впрыскиваемого топлива на основе оценки заряда воздуха, причем оценка заряда воздуха определена на основе извлеченных первого и второго значений сигнала.
19. Система по п. 14, отличающаяся тем, что двигатель является двигателем с непосредственным впрыском, причем регулирование количества впрыскиваемого топлива предназначено для события впрыска топлива, происходящего в текущем цикле двигателя.
20. Система по п. 14, отличающаяся тем, что двигатель является двигателем с распределенным впрыском, причем регулирование количества впрыскиваемого топлива предназначено для события впрыска топлива, происходящего в последующем цикле двигателя.
| US 2004255902 A1, 2004.12.23 | |||
| US 2005205057 A1, 2005.09.22 | |||
| WO 2014192777 A1, 2014.12.04 | |||
| CN 100404831 C, 2008.07.23 | |||
| CN 100489292 C, 2009.05.20 | |||
| JP 4253339 B2, 2009.04.08 | |||
| УСОВЕРШЕНСТВОВАННЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ И ЕГО РАБОЧИЙ ЦИКЛ | 1997 |
|
RU2189468C2 |

